基于uCOS_的MODBUS协议的实现
MODBUS通讯协议及编程

MODBUS通讯协议及编程协议名称:MODBUS通讯协议及编程一、引言MODBUS通讯协议是一种常用的串行通信协议,用于在自动化控制系统中实现设备之间的数据交换。
本协议旨在详细描述MODBUS通讯协议的各种功能和编程实现方法,以便开发人员能够准确地理解和应用该协议。
二、协议概述MODBUS通讯协议是一种基于主从结构的协议,主要用于在工业自动化系统中实现设备之间的数据传输。
该协议定义了一组功能码,用于读取和写入设备的寄存器和线圈。
MODBUS通讯协议支持多种物理层传输介质,如串行通信和以太网通信。
三、协议功能1. 读取线圈状态(功能码01)该功能码用于读取设备中的线圈状态,返回线圈的当前状态。
开发人员可以通过该功能码实现对设备的远程监控和控制。
2. 读取离散输入状态(功能码02)该功能码用于读取设备中的离散输入状态,返回输入信号的当前状态。
开发人员可以通过该功能码实现对设备输入信号的实时监测。
3. 读取保持寄存器(功能码03)该功能码用于读取设备中的保持寄存器的值,返回寄存器的当前值。
开发人员可以通过该功能码实现对设备状态的实时获取。
4. 读取输入寄存器(功能码04)该功能码用于读取设备中的输入寄存器的值,返回寄存器的当前值。
开发人员可以通过该功能码实现对设备输入信号的实时获取。
5. 写单个线圈(功能码05)该功能码用于写入设备中的单个线圈,将线圈的状态设置为开或闭。
开发人员可以通过该功能码实现对设备的远程控制。
6. 写单个保持寄存器(功能码06)该功能码用于写入设备中的单个保持寄存器,设置寄存器的值。
开发人员可以通过该功能码实现对设备状态的远程控制。
7. 写多个线圈(功能码15)该功能码用于写入设备中的多个线圈,同时设置多个线圈的状态。
开发人员可以通过该功能码实现对设备的批量控制。
8. 写多个保持寄存器(功能码16)该功能码用于写入设备中的多个保持寄存器,同时设置多个寄存器的值。
开发人员可以通过该功能码实现对设备状态的批量控制。
EU控制器MODBUS通讯协议
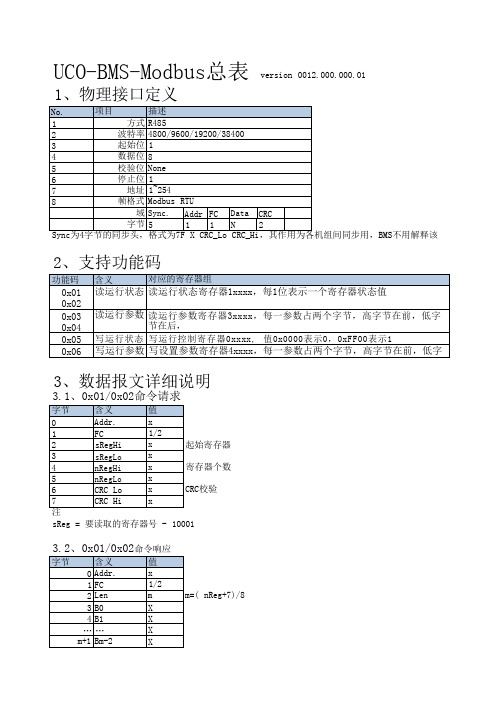
UCO-BMS-Modbus 总表 1、物理接口定义version 0012.000.000.01BMS 不用解释该2、支持功能码3、数据报文详细说明寄存器个数 校验 sReg = 要读取的寄存器号 - 10001命令响应1,每一bit 代表一个寄存器的值,0:表示关,1:表示开2,每个字节从bit0开始填充,最后一个字节的不足8位的,则剩余的高位添0sReg = 要读取的寄存器号 - 300011、sReg = 要读取的寄存器号 - 000012、0x0000表示关,0xFF00表示开写的值 校验 寄存器个数 校验如果写入成功,则数据原样返回,否则应答不成功原因- 400013.8、0x06命令响应1、如果写入成功,则数据原样返回,否则应答不成功原因2、如果写入成功,则值会写入EEPROM ,掉电保存4、异常响应除广播地址不响应外,本机接收请求,会有如下4中响应处理 1)接收到一个正确的,可以正常操作的命令请求,则响应一个正常的,有效的响应。
2)如果由于通讯错误,没有接收到有效的命令请求,则不响应 3)如果由于通讯错误,接收到命令请求中的CRC 校验错误,则不响应 4)如果接收到有效的请求命令,但却无法操作,比如寄存器不存在,或值无效,则返回一个例外 小节3详细描述了正常响应的报文格式如果数据报文无法操作,则按如下报文规则返回一个例外响应,例外响应的FC 的最高位置1写的值 校验 写的值 校验 写的值 校验 sReg = 要读取的寄存器号5、数据表6、协议使用详细说明6.1、6.1.1 读取开关量,01命令请求报文01 01 00 3C 00 27 BC 1C01命令响应报文0500 00 80 0B 00 97 8A字节0的bit0为61号寄存器值,bit1为62号寄存器的值,每8个连续的寄存器的值组成一个字节6.1.2 读取模拟量,03命令请求报文01 03 00 00 00 0585 C903命令响应报文01 030A FE 70 00 62 FD DA 00 00 00 00 2A BA2的补码表示,比如FE70为-400,除以6.1.3 控制命令,05命令请求报文01 05 00 1D FF 0005命令响应报文,控制成功01 05 00 1D FF 006.1.4 设置命令,06命令请求报文01 06 00 14 01 3D1C 3C1C 3C09 8F06命令响应报文,设置成功01 06 00 14 01 3D 09 8F2的补码表示,下发的数据=实际数据6.2、控制说明1、要进入手动或调测模式,用05命令,控制寄存器30,下发值FF00进入调测模式,下发值0000退2、所有部件的控制,必须进入调测模式才可以控制,否则返回控制不成功3、必须先启动内风机,才能开启其它部件,否则开启不了4、要进入强制制冷模式,用05命令,控制寄存器29,下发值FF00进入强制制冷,下发值0000退出5、所有06命令下发的设置值,都会写入到EEPROM中,掉电不丢失。
VC++实现基于MODBUS协议通信程序

MASTER:static unsigned char auchCRCHi[] = {0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01,0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81,0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01,0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40} ;static unsigned char auchCRCLo[] = {0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4,0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09,0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD,0x1D, 0x1C, 0xDC, 0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3,0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7,0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE,0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26,0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2,0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB,0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5,0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0, 0x50, 0x90, 0x91,0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88,0x48, 0x49, 0x89, 0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83, 0x41, 0x81, 0x80,0x40} ;unsigned short CRC16(unsigned char* puchMsg, unsigned char usDataLen)/* message to calculate CRC upon *//* quantity of bytes in message */{unsigned char uchCRCHi = 0xFF ; /* high byte of CRC initialized */unsigned char uchCRCLo = 0xFF ; /* low byte of CRC initialized */unsigned uIndex ; /* w ill index into CRC lookup table */while (usDataLen--) /* pass through message buffer */{uIndex = uchCRCHi ^ *puchMsg++ ; /* calculate the CRC *///这几条没看明白uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex];uchCRCLo = auchCRCLo[uIndex] ;}*puchMsg++ = uchCRCHi;*puchMsg = uchCRCLo;retur n (uchCRCHi << 8 | uchCRCLo) ;}BOOL CSer ialmodbusDlg::OnInitD ialog(){CDialog::OnInitDialog();SetIcon(m_hIcon, TRUE); // Set big iconSetIcon(m_hIcon, FALSE); // Set small icon// TODO: Add extra initialization herem_MSC omm.SetCommPort(1);//在设置选项里的por t值不能初始时未能传递过来m_MSComm.SetInputMode(1);m_MSComm.SetInBufferSize(1024);m_MSComm.SetOutBufferSize(512);m_MSComm.SetR Threshold(1);m_MSComm.SetInputLen(0);m_MSComm.SetSettings("9600,n,8,1");if(!m_MSComm.GetPortOpen())m_MSC omm.SetPortOpen(TRUE);elseMessageBox("打开串口出错");m_MSComm.GetInput();//先预读以清除残留数据retur n TRUE; // return TRUE unless you set the focus to a control}void CSer ialmodbusDlg::open_serial(){if(!m_MSComm.GetPortOpen())m_MSC omm.SetPortOpen(TRUE);//打开串口//应该还有一些后续的操作情形,暂时留待协议能完成之后再行添加}void CSer ialmodbusDlg::close_serial(){if(m_MSC omm.GetPortOpen())m_MSC omm.SetPortOpen(FALSE);}BEGIN_EVEN TSIN K_MAP(CSerialmodbusDlg, CDialog)//{{AFX_EVEN TSINK_MAP(CSerialmodbusDlg)ON_EVEN T(CSerialmodbusDlg, IDC_MSCOMM1, 1 /* OnComm */, OnOnCommMscomm1, VTS_NONE) //}}AFX_EVEN TSINK_MAPEND_EVEN TSINK_MAP()void CSer ialmodbusDlg::OnOnCommMscomm1(){V ARIAN T variant_inp;COleSafeArray safearray_inp;long length,i;BYTE data[4096];unsigned char sendback[8];CStr ing strtemp;CStr ing strDisp;int nEvent=m_MSC omm.GetCommEvent();int k;switch (nEvent)//接收缓冲区内有字符{case 2:k=m_MSComm.GetInBufferCount();if(k>0){variant_inp=m_MSComm.GetInput();//读取缓冲区内的数据safearray_inp=var iant_inp;//将VARIAN T型变量转换为C oleSafeArray型变量length=safearray_inp.GetOneDimSize();//确定数据长度for(i=0;i<length;i++)safearray_inp.GetElement(&i,data+i);//将数据转换为BYTE型数组for(i=0;i<length;i++){BYTE bt=*(char*)(data+i);//字符型*(sendback+i)=*(char*)(data+i);strtemp.Format("%02X",bt);//将字符送入临时变量strtemp存放strDisp+=strtemp;//加入接收编辑框对应字符串}int nlen=m_ctrlEditRec.GetWindowTextLength();m_ctrlEditRec.SetSel(nlen+1,nlen);m_ctrlEditRec.ReplaceSel(strDisp);if(strDisp!="ffff"){C Str ing str_modbus[11];for(i=0;i<11;i++){str_modbus[i]=strDisp.Mid(i*2,2);}CEdit* pedit=(CEdit*)GetD lgItem(IDC_EDIT_DEVICE);pedit->SetW indow Text(str_modbus[0]);CEdit* pedit1=(CEdit*)GetDlgItem(IDC_EDIT_FUNCTION);pedit1->SetWindowText(str_modbus[1]);CEdit* pedit2=(CEdit*)GetDlgItem(IDC_EDIT_FIRST_ADDRESS);pedit2->SetWindowText(str_modbus[2]);CEdit* pedit3=(CEdit*)GetDlgItem(IDC_EDIT_DATA_NUM);pedit3->SetWindow Text(str_modbus[3]+str_modbus[4]+" "+str_modbus[5]+str_modbus[6]+" "+str_modbus[7]+str_modbus[8]);CEdit* pedit4=(CEdit*)GetDlgItem(IDC_EDIT_CHECK_CRC);pedit4->SetWindowText(str_modbus[9]+str_modbus[10]);}else{AfxMessageBox("数据发送有误,请重新发送!");}break;}}}void CSer ialmodbusDlg::OnSendButton()// TODO: Add your control notification handler code heresendbuf();}void CSer ialmodbusDlg::OnTimer(UINT nIDEvent){// TODO: Add your message handler code here and/or call default//UpdateData(true);//sendbuf();CDialog::OnTimer(nIDEvent);}void CSer ialmodbusDlg::sendbuf(){unsigned char arr_cmd[] = {0x01,0x03,0x00,0x25,0x00,0x03,0xff,0xff};//arr_cmd[0] = m_nAddress[m_nCurModule-1];unsigned short CRC = CRC16(arr_cmd,6);/*arr_cmd[6] = (unsigned char) CRC;arr_cmd[7]= (unsigned char) (CRC >> 8);*/CStr ing str_cmd(arr_cmd);BSTR bstr_cmd ;bstr_cmd = SysAllocStringByteLen((char*) arr_cmd,8); //分配BSTR资源TRACE("String len of bstr_cmd =%d\n",SysStringByteLen(bstr_cmd));VARIAN T var;Var iantInit(&var); //初始化VARIAN Tvar.vt = VT_BSTR;var.bstrVal = bstr_cmd;//设置BSTR类型和值m_MSComm.SetN ullD iscard(FALSE); //接收时保留NULL字符CByteArray cba_cmd; //使用CByteArray发送字符(因中有字符NULL-0) for(int i=0;i<8;i++){cba_cmd.Add(arr_cmd[i]);}m_MSComm.SetOutput(COleV ariant(cba_cmd));SysFreeStr ing(bstr_cmd);}SLAVE:static unsigned char auchCRCHi[] = {0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01,0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81,0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01,0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0,0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01,0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81, 0x40, 0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41,0x00, 0xC1, 0x81, 0x40, 0x01, 0xC0, 0x80, 0x41, 0x01, 0xC0, 0x80, 0x41, 0x00, 0xC1, 0x81,0x40} ;static unsigned char auchCRCLo[] = {0x00, 0xC0, 0xC1, 0x01, 0xC3, 0x03, 0x02, 0xC2, 0xC6, 0x06, 0x07, 0xC7, 0x05, 0xC5, 0xC4,0x04, 0xCC, 0x0C, 0x0D, 0xCD, 0x0F, 0xCF, 0xCE, 0x0E, 0x0A, 0xCA, 0xCB, 0x0B, 0xC9, 0x09, 0x08, 0xC8, 0xD8, 0x18, 0x19, 0xD9, 0x1B, 0xDB, 0xDA, 0x1A, 0x1E, 0xDE, 0xDF, 0x1F, 0xDD, 0x1D, 0x1C, 0xDC, 0x14, 0xD4, 0xD5, 0x15, 0xD7, 0x17, 0x16, 0xD6, 0xD2, 0x12, 0x13, 0xD3, 0x11, 0xD1, 0xD0, 0x10, 0xF0, 0x30, 0x31, 0xF1, 0x33, 0xF3, 0xF2, 0x32, 0x36, 0xF6, 0xF7,0x37, 0xF5, 0x35, 0x34, 0xF4, 0x3C, 0xFC, 0xFD, 0x3D, 0xFF, 0x3F, 0x3E, 0xFE, 0xFA, 0x3A,0x3B, 0xFB, 0x39, 0xF9, 0xF8, 0x38, 0x28, 0xE8, 0xE9, 0x29, 0xEB, 0x2B, 0x2A, 0xEA, 0xEE, 0x2E, 0x2F, 0xEF, 0x2D, 0xED, 0xEC, 0x2C, 0xE4, 0x24, 0x25, 0xE5, 0x27, 0xE7, 0xE6, 0x26, 0x22, 0xE2, 0xE3, 0x23, 0xE1, 0x21, 0x20, 0xE0, 0xA0, 0x60, 0x61, 0xA1, 0x63, 0xA3, 0xA2,0x62, 0x66, 0xA6, 0xA7, 0x67, 0xA5, 0x65, 0x64, 0xA4, 0x6C, 0xAC, 0xAD, 0x6D, 0xAF, 0x6F,0x6E, 0xAE, 0xAA, 0x6A, 0x6B, 0xAB, 0x69, 0xA9, 0xA8, 0x68, 0x78, 0xB8, 0xB9, 0x79, 0xBB, 0x7B, 0x7A, 0xBA, 0xBE, 0x7E, 0x7F, 0xBF, 0x7D, 0xBD, 0xBC, 0x7C, 0xB4, 0x74, 0x75, 0xB5, 0x77, 0xB7, 0xB6, 0x76, 0x72, 0xB2, 0xB3, 0x73, 0xB1, 0x71, 0x70, 0xB0, 0x50, 0x90, 0x91,0x51, 0x93, 0x53, 0x52, 0x92, 0x96, 0x56, 0x57, 0x97, 0x55, 0x95, 0x94, 0x54, 0x9C, 0x5C,0x5D, 0x9D, 0x5F, 0x9F, 0x9E, 0x5E, 0x5A, 0x9A, 0x9B, 0x5B, 0x99, 0x59, 0x58, 0x98, 0x88,0x48, 0x49, 0x89, 0x4B, 0x8B, 0x8A, 0x4A, 0x4E, 0x8E, 0x8F, 0x4F, 0x8D, 0x4D, 0x4C, 0x8C,0x44, 0x84, 0x85, 0x45, 0x87, 0x47, 0x46, 0x86, 0x82, 0x42, 0x43, 0x83, 0x41, 0x81, 0x80,0x40unsigned short CRC16(unsigned char* puchMsg, unsigned char usDataLen)/* message to calculate CRC upon *//* quantity of bytes in message */{unsigned char uchCRCHi = 0xFF ; /* high byte of CRC initialized */unsigned char uchCRCLo = 0xFF ; /* low byte of CRC initialized */unsigned uIndex ; /* w ill index into CRC lookup table */while (usDataLen--) /* pass through message buffer */{uIndex = uchCRCHi ^ *puchMsg++ ; /* calculate the CRC *///这几条没看明白uchCRCHi = uchCRCLo ^ auchCRCHi[uIndex];uchCRCLo = auchCRCLo[uIndex] ;}*puchMsg++ = uchCRCHi;*puchMsg = uchCRCLo;retur n (uchCRCHi << 8 | uchCRCLo) ;}BOOL CSer ialmodbus2Dlg::OnInitDialog(){CDialog::OnInitDialog();m_MSComm.SetCommPort(2);//在设置选项里的port值不能初始时未能传递过来m_MSComm.SetInputMode(1);m_MSComm.SetInBufferSize(1024);m_MSComm.SetOutBufferSize(512);m_MSComm.SetR Threshold(1);m_MSComm.SetInputLen(0);m_MSComm.SetSettings("9600,n,8,1");if(!m_MSComm.GetPortOpen())m_MSC omm.SetPortOpen(TRUE);elseMessageBox("打开串口出错");m_MSComm.GetInput();//先预读以清除残留数据retur n TRUE; // return TRUE unless you set the focus to a control}void CSer ialmodbus2Dlg::open_serial(){if(!m_MSComm.GetPortOpen())m_MSC omm.SetPortOpen(TRUE);//打开串口//应该还有一些后续的操作情形,暂时留待协议能完成之后再行添加void CSer ialmodbus2Dlg::close_serial(){if(m_MSC omm.GetPortOpen())m_MSC omm.SetPortOpen(FALSE);}void CSer ialmodbus2Dlg::OnTimer(UINT nIDEvent){// TODO: Add your message handler code here and/or call default//UpdateD ata(true);// Combine(m_device, m_funccode,m_faddress,m_datanum);CDialog::OnTimer(nIDEvent);}BEGIN_EVEN TSIN K_MAP(CSerialmodbus2Dlg, CD ialog)//{{AFX_EVEN TSINK_MAP(CSerialmodbus2Dlg)ON_EVEN T(CSerialmodbus2Dlg, IDC_MSCOMM1, 1 /* OnComm */, OnC omm, VTS_NONE) //}}AFX_EVEN TSINK_MAPEND_EVEN TSINK_MAP()void CSer ialmodbus2Dlg::OnComm(){VARIAN T variant_inp;COleSafeArray safearray_inp;long length,i;BYTE data[4096];unsigned char sendback[100];CStr ing strtemp;CStr ing strDisp;int nEvent=m_MSC omm.GetCommEvent();int k;switch (nEvent)//接收缓冲区内有字符{case 2:k=m_MSComm.GetInBufferCount();if(k>0){variant_inp=m_MSComm.GetInput();//读取缓冲区内的数据safearray_inp=var iant_inp;//将VARIAN T型变量转换为C oleSafeArray型变量length=safearray_inp.GetOneDimSize();//确定数据长度for(i=0;i<length;i++)safearray_inp.GetElement(&i,data+i);//将数据转换为BYTE型数组for(i=0;i<length;i++){BYTE bt=*(char*)(data+i);//字符型*(sendback+i)=*(char*)(data+i);strtemp.Format("%02X",bt);//将字符送入临时变量strtemp存放strDisp+=strtemp;//加入接收编辑框对应字符串}C Str ing str_crc;str_crc.Format("%c%c",sendback[6],sendback[7]);unsigned short CRC = CRC16(sendback,6);C Str ing str_check;str_check.Format("%c%c",sendback[6],sendback[7]);if(str_check==str_crc){int nlen=m_ctrlEditRec.GetWindowTextLength();m_ctrlEditRec.SetSel(nlen+1,nlen);m_ctrlEditRec.ReplaceSel(strDisp);C Str ing str_modbus[8];for(i=0;i<8;i++){str_modbus[i]=strDisp.Mid(i*2,2);}Str ing2Hex(strDisp,sendback);unsigned char arr_cmd[] = {sendback[0],sendback[1],0x06,0x08,0x2C,0x08,0x2A,0x08,0x2C,0xff,0xff};sendbuf(arr_cmd);/* CByteArray cba_cmd; //使用C ByteArray发送字符(因中有字符NULL-0)for(int i=0;i<11;i++){cba_cmd.Add(arr_cmd[i]);}m_MSC omm.SetOutput(COleV ariant(arr_cmd));*/CEdit* pedit=(CEdit*)GetD lgItem(IDC_EDIT_DEVICE);pedit->SetW indow Text(str_modbus[0]);CEdit* pedit1=(CEdit*)GetDlgItem(IDC_EDIT_FUNCTION);pedit1->SetWindowText(str_modbus[1]);CEdit* pedit2=(CEdit*)GetDlgItem(IDC_EDIT_FIRST_ADDRESS);pedit2->SetWindowText(str_modbus[2]+str_modbus[3]);CEdit* pedit3=(CEdit*)GetDlgItem(IDC_EDIT_DATA_NUM);pedit3->SetWindowText(str_modbus[4]+str_modbus[5]);CEdit* pedit4=(CEdit*)GetDlgItem(IDC_EDIT_CHECK_CRC);pedit4->SetWindowText(str_modbus[6]+str_modbus[7]);}else{unsigned char arr_cmd[]={0xff,0xff};CByteArray cba_cmd; //使用CByteArray发送字符(因中有字符NULL-0) for(int i=0;i<2;i++){cba_cmd.Add(arr_cmd[i]);}m_MSComm.SetOutput(COleV ariant(cba_cmd));}}break;}}int CSer ialmodbus2Dlg::Str ing2Hex(CString str, unsigned char senddata[]){int hexdata,lowhexdata;int hexdatalen=0;int len=str.GetLength();//senddata.SetSize(len/2);for(int i=0;i<len;){char lstr,hstr=str[i];if(hstr==' '){i++;continue;}i++;if(i>=len)break;lstr=str[i];hexdata=ConvertHexChar(hstr);lowhexdata=ConvertHexChar(lstr);if((hexdata==16)||(lowhexdata==16))br eak;elsehexdata=hexdata*16+lowhexdata;i++;senddata[hexdatalen]=(char)hexdata;hexdatalen++;}//senddata.SetSize(hexdatalen);retur n hexdatalen;}char CSer ialmodbus2Dlg::ConvertHexC har(char ch){if((ch>='0')&&(ch<='9'))return ch-0x30;else if((ch>='A')&&(ch<='F'))return ch-'A'+10;else if((ch>='a')&&(ch<='f'))return ch-'a'+10;else return (-1);}void CSer ialmodbus2Dlg::sendbuf(unsigned char arr_cm d[]){//unsigned char arr_cmd[] = {0x01,0x03,0x00,0x25,0x00,0x03,0xff,0xff};unsigned short CRC = CRC16(arr_cmd,9);CStr ing str_cmd(arr_cmd);BSTR bstr_cmd ;bstr_cmd = SysAllocStringByteLen((char*) arr_cmd,11); //分配BSTR资源TRACE("String len of bstr_cmd =%d\n",SysStringByteLen(bstr_cmd));VARIAN T var;Var iantInit(&var); //初始化VARIAN Tvar.vt = VT_BSTR;var.bstrVal = bstr_cmd;//设置BSTR类型和值m_MSComm.SetN ullD iscard(FALSE); //接收时保留NULL字符CByteArray cba_cmd; //使用CByteArray发送字符(因中有字符NULL-0) for(int i=0;i<11;i++){cba_cmd.Add(arr_cmd[i]);}m_MSComm.SetOutput(COleV ariant(cba_cmd));SysFreeStr ing(bstr_cmd);}。
modbus通讯协议编程

modbus通讯协议编程Modbus通讯协议是一种常用的串行通信协议,用于在不同设备之间进行数据交换。
在进行Modbus通讯协议编程时,需要考虑以下几个方面:1. 选择合适的编程语言,根据你的需求和技术背景,选择适合的编程语言进行Modbus编程。
常见的选择包括C/C++、Python、Java等。
2. 确定通信方式,Modbus支持串行通信和以太网通信两种方式。
你需要确定使用哪种方式,并相应地选择合适的库或者API进行编程。
3. 选择合适的库或者API,根据你选择的编程语言和通信方式,选择适合的Modbus库或者API。
这些库通常提供了一些常用的函数和方法,用于建立连接、发送和接收数据等操作。
4. 建立连接,在编程中,首先需要建立与Modbus设备的连接。
这通常涉及到设定通信参数,如串口波特率、数据位、停止位等。
通过库或者API提供的函数或者方法,可以轻松地建立连接。
5. 发送和接收数据,一旦连接建立成功,就可以通过库或者API提供的函数或者方法发送和接收数据。
根据Modbus协议的规定,你需要构造合适的请求报文,并解析响应报文。
6. 错误处理,在Modbus通讯中,可能会出现一些错误,如通信超时、设备未响应等。
编程中需要考虑这些错误情况,并进行相应的处理,如重新发送请求或者提示错误信息。
7. 安全性考虑,在进行Modbus通讯协议编程时,需要考虑安全性问题。
可以采取一些安全措施,如使用加密算法对数据进行加密、限制访问权限等。
8. 测试和调试,在完成编程后,需要进行测试和调试,确保程序能够正常运行。
可以使用模拟器或者实际的Modbus设备进行测试,并检查数据的准确性和稳定性。
总结起来,Modbus通讯协议编程需要选择合适的编程语言和通信方式,选择适合的库或者API,建立连接,发送和接收数据,处理错误情况,考虑安全性问题,并进行测试和调试。
这些步骤都需要仔细考虑和实施,以确保编程的成功和稳定性。
基于VC﹢﹢的Modbus协议串口通信设计与实现

基于VC﹢﹢的Modbus协议串口通信设计与实现
随着现代工业的发展,现在的工业控制系统越来越多地使用计算机控制和管理,而串口通信则作为一种常见的通信方式被广泛应用。
Modbus协议是一种能够实现设备之间互相通信的串
口通信协议,已经成为现代工业控制系统中最常用的通信协议之一。
本文将介绍基于VC++的Modbus协议串口通信设计和
实现方法。
首先,需要明确Modbus协议的基本特点。
Modbus协议是一
种开放的通信协议,能够适用于不同的硬件平台和操作系统。
包含四个不同的功能码用于不同目的的数据传输,数据格式为16位2个字节的整数表示。
Modbus协议的主从结构通信方式,主机需要先发送请求信号,从机收到请求信号后进行回应,整个通信过程需要通过串口实现。
其次,介绍基于VC++的Modbus协议串口通信设计和实现方法。
首先,在VC++环境下,建立工程并添加串口操作库,实
现串口数据发送和接收功能。
接着,按照Modbus协议规定的
结构和格式,实现Modbus数据包的构建和解析。
最后,将数
据包和串口通信功能结合起来,实现完整的Modbus协议串口
通信功能。
在具体实现过程中,需要考虑一些问题。
例如,当从机没有回应主机请求信号时,需要进行异常处理并重新发送请求;当多个从机同时向主机发送数据时,需要对数据进行区分和解析等。
总之,基于VC++的Modbus协议串口通信设计和实现方法,
可以在工业控制系统中广泛应用。
掌握了相关的知识和技能,不仅可以提升自己的能力,还能够为工业生产和控制系统的发展做出贡献。
Modbus通讯协议详解
Modbus通讯协议详解一、引言Modbus通讯协议是一种常用于工业控制系统中的通信协议,它基于主从结构,用于实现不同设备之间的数据交换。
本文将详细介绍Modbus通讯协议的基本原理、通信方式、数据格式以及常见应用场景。
二、协议原理Modbus通讯协议是基于串行通信的协议,它使用简单的请求/响应模式进行数据交换。
协议包括两种通信方式:Modbus ASCII和Modbus RTU。
Modbus ASCII使用ASCII码表示数据,而Modbus RTU使用二进制码表示数据。
协议规定了数据的传输格式、通信命令、错误检测等。
三、通信方式1. Modbus ASCII通信方式Modbus ASCII通信方式使用ASCII码表示数据,每个字节使用两个ASCII字符表示,其中包括一个校验和。
通信过程中,主站发送请求命令,从站接收并处理请求,然后从站发送响应。
请求和响应之间使用回车换行符进行分隔。
2. Modbus RTU通信方式Modbus RTU通信方式使用二进制码表示数据,每个字节使用8位二进制表示。
通信过程中,主站发送请求命令,从站接收并处理请求,然后从站发送响应。
请求和响应之间使用帧间隔进行分隔。
四、数据格式1. Modbus ASCII数据格式Modbus ASCII数据格式由起始字符、从站地址、功能码、数据区、校验和和结束字符组成。
起始字符是冒号,结束字符是回车换行符。
校验和是通过对除起始字符和校验和本身外的所有字符进行异或运算得到的。
2. Modbus RTU数据格式Modbus RTU数据格式由从站地址、功能码、数据区、CRC校验和组成。
CRC校验和是通过对从站地址、功能码和数据区的所有字节进行CRC校验运算得到的。
五、常见应用场景Modbus通讯协议广泛应用于工业自动化领域,常见的应用场景包括:1. 监控系统:通过Modbus通讯协议,可以实现对各种传感器、仪表的数据采集和监控。
2. 控制系统:Modbus通讯协议可用于实现对各种执行器、控制器的控制和调节。
基于uCOS_的MODBUS协议的实现

《装备制造技术》2009年第1期M odbus 协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间及控制器经由网络与其他设备之间,可以进行通信。
M odbus 协议简单易理解,使用广泛,已经成为行业通用工业标准。
目前,基于ARM 的嵌入式控制器已经广泛应用,在这些嵌入式控制器上实现M odbus 协议,对于系统联网通信具有很重要意义。
uCOS_II 是一种可移植、可剪裁及可剥夺型的多任务实时内核(RTOS ),它提供了时间管理和信号量、消息邮箱、消息队列等任务间同步和通信的机制。
利用该内核的这些机制,设计实现M odbus 协议,可以大大提高系统的实时性和稳定性,并且易于使用。
M odbus 协议是主—从协议,仅一个主站(在同一时间)连接在总线上,一个或多个从站节点也连接在相同的串行总线上。
对采用M odbus 协议进行通信的控制器,在系统中主要配置为从站,对应与CS 模型中的服务器端,令主站实现机制与从站相类似,因此本文只详细论述M odbus 的从站协议的实现。
1Modbus 协议描述M odbus 协议是一个两层协议,对应与ISO 分层模型中的链路层和应用层。
M odbus 协议定义了一个独立于底层通信层的简单协议数据单元,在用于特定总线和网络上时,引入一些附加的域,从而构成应用数据单元。
M odbus 协议数据帧结构如图1所示。
其中,有效的从设备地址分配范围是1~247,功能码指示从站要执行何种操作,功能码之后是包含请求和回应参量的数据域,错误校验是报文内容执行冗余校验计算后的结果。
其中,校验计算根据采用的是RTU 或是ASCII 传输方式而分别选择CRC 校验或LRC 校验。
2Modbus 协议从站的实现从数据流的处理过程上分析,从站的实现分为链路层和应用层两个部分。
链路层负责接收字节信号,并判断是否接收完完整的数据帧数据,当接收完一帧数据时,链路层部分程序就向应用层发送一个信号量,进而应用层对数据帧进行处理。
MODBUS通讯协议及编程

MODBUS通讯协议及编程MODBUS通讯协议是由Modicon(现在的施耐德电气公司)公司在1979年开发的,目的是为了实现其PLC(Programmable Logic Controller,可编程逻辑控制器)产品与外部设备之间的通信。
随着时间的推移,MODBUS已经成为了工业自动化领域中最常用的通信协议之一MODBUS通讯协议基于Master/Slave(主/从)架构,主要有三种传输方式:串行传输、串行ASCII以及串行RTU。
其中,串行传输方式使用RS-232或RS-485接口进行通信,而串行ASCII和串行RTU则使用标准的ASCII和二进制格式进行数据传输。
在实际的应用中,串行RTU是最常用的一种传输方式,因为它在数据传输速度和可靠性方面都具有良好的表现。
MODBUS通讯协议的编程接口有两种:MODBUSRTU/ASCII和MODBUSTCP/IP。
MODBUSRTU/ASCII是通过串行接口传输数据的方式,它使用的函数包括读写单个寄存器、读写多个寄存器等。
MODBUSTCP/IP是通过以太网传输数据的方式,它使用的函数与MODBUSRTU/ASCII相同,但是需要使用不同的协议栈来实现。
在MODBUS通讯协议的编程中,需要用到一些重要的概念,例如Slave ID、Function Code和Register Address等。
Slave ID是指设备的地址,用于识别通信的目标设备。
Function Code是指功能码,用于指定需要执行的操作,例如读取寄存器、写入寄存器等。
Register Address是指寄存器地址,用于指定需要读写的寄存器的位置。
在具体的编程实现中,可以使用各种编程语言来编写MODBUS通讯协议的程序。
例如C语言、Python等。
通过调用相应的MODBUS库函数,可以实现与MODBUS设备的通信。
在编程过程中,需要注意设置正确的串口参数、IP地址以及端口号等。
MODBUS通讯协议在工业自动化中有着广泛的应用。
基于modbus协议串口通信原理
寄存器起始地址 00 32
寄存器起始地址 00 32
寄存器起始地址 00 12
寄存器起始地址 00 12
数据 FF 00 数据 FF 00 寄存器数量 00 15 寄存器数量 00 15
CRC校验 码
2D F5
CRC校验
2D F5 数据长度 (字节)
01
CRC校验 35 E3
数据 FF
CRC校 验
常见的收、发芯片:SP3485 空闲状电压为1
从站1
RS-485+/A
Байду номын сангаас
RS-485+/B
从站2
从站3
从站4
从站5
AB电势差 空闲电压 起始位
5V
数据位
校验位 校验位
图示电平信号为485
0V
无效信 号区域
-5V
1秒中9600个bit信号
2.1、RS-232接线
RS-232通信属于全双工,可以同时发送、接收数据,但只能一对一进行通信
主站
从站
从站5
同一时间主站只能发送或接收数据的 通信模式叫半双工
2.1、RS-485通信原理之电压现象
RS-485通过改变A、B之间的电压差进行数据传输
发送端 AB间的电压差
接收端AB间电压差
1:+2 ~ +6v
1:>200mv
0:-2 ~ -6v
0:<-200mv
RS-485通信常见工作电压为5V、3.3V(少见)
CRC校验
B8 90
CRC校验码
6C 05
数据2 0B
CRC校验 AF 0B
CRC校验 38 DB
2.2、modbus报文格式(RTU)
MODBUS通讯的C语言实现与简单讲解

MODBUS通讯的C语言实现与简单讲解01H(读取线圈状态)请求数据包格式:ADDRESS(1BYTE) 01H(1BYTE) STARTADDRH(1BYTE) STARTADD RL(1BYTE) NUMH(1BYTE) NUML(1BYTE) CRCL(1BYTE) CRCH(1 BYTE)解释:ADDRESS=被请求对象的地址,服务器地址或从站地址;STARTADDR=读取的线圈的启示位地址;NUM=连续读取的线圈的个数;CRC=对于RTU来讲是有的,CRC校验。
回应数据包格式:ADDRESS(1BYTE) 01H(1BYTE) BYTECOUNT(1BYTE) DATA1 ... DATAN CRCL(1BYTE) CRCH(1BYTE)解释:ADDRESS=被请求对象的地址,也就是服务器或从站地址;BYTECOUNT=发送的数据帧中,数据的字节数,CRC=对于RTU来讲是有的,CRC校验。
注意:回复数据时,数据帧的DATA顺序是,字节顺序从左往右由低到高,每个字节DATA中的位从右往左是bit0~bit7!02H(读取离散状态)请求数据包格式:ADDRESS(1BYTE) 02H(1BYTE) STARTADDRH(1BYTE) STARTADD RL(1BYTE) NUMH(1BYTE) NUML(1BYTE) CRCL(1BYTE) CRCH(1 BYTE)解释:ADDRESS=被请求对象的地址,服务器地址或从站地址;STARTADDR=读取的离散状态的启示位地址;NUM=连续读取的线圈的个数;CRC=对于RTU来讲是有的,CRC校验。
回应数据包格式:ADDRESS(1BYTE) 01H(1BYTE) BYTECOUNT(1BYTE) DATA1 ... DATAN CRCL(1BYTE) CRCH(1BYTE)解释:ADDRESS=被请求对象的地址,也就是服务器或从站地址;BYTECOUNT=发送的数据帧中,数据的字节数,CRC=对于RTU来讲是有的,CRC校验。
基于MODBUS协议通信的设计与实现

© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. 修正仪表系数为K 1,1ΠK 1则表示补偿后每个脉冲的升数,则由式(2)可得:K 1=αK (1-cp Πη)v(5)流量计在受到温度的影响时,随着温度的升高,壳体和转子都膨胀,因此有必要进行温度补偿。
温度修正是指使用温度与标定温度不同而进行的修正,温度修正按下式计算:C T =-βα(T 2-T 1)(6)式中C T 为温度修正值;T 2为使用温度;T 1为标定时标定介质温度;βa 为流量计壳体体膨胀系数。
不锈钢壳体的βa 是0100486%℃;普通碳钢壳体的βa 是010036%Π℃;青铜壳体的βa 是0100576%Π℃。
仪表系数修正计算按下式计算:K c =K 1(1+c T )(7)式中,K c 为修正后的仪表系数。
21数控灌油装置误差分析传统的灌桶型数控灌油装置在控制上采用A 、B 阀控制方式,即开始灌油时打开A 阀,B 阀关闭,当所灌液体达到每桶的预置量时,发出指令,关闭A 阀,同时打开B 阀,当所灌液体达到每桶的预置量时,发出指令,关闭B 阀,同时打开A 阀,重复此过程,直到达到所预置的总量为止。
由LCB -9800系列不锈钢椭圆齿轮流量计的原理可知,流量计产生的脉冲与流量有式(4)的关系。
由于阀门开关时间的存在,造成灌桶误差,灌桶的体积V 为:V =Qt 1+珡Q 1t 2=F K (t 1+12t 2)(8)式中:t 1为数控发出起动指令到数控发出切换指令的时间;t 2为数控发出切换指令到切换完成的时间,珡Q 1的关闭时间t 2的平均流量。
用误差传播公式求得V 的误差式d V =(t 1+t 2Π2K )2d F 2+(F (t 1+t 2Π2)K2)2d K 2+F K (d t 1+12d t 2)式中:1ΠK (t 1+t 2Π2)d F 是流量计输出脉冲的稳定性和流量波动造成的误差;F ΠK 2(t 1+t 2Π2)d K是流量计仪表系数非线性误差造成的误差;F ΠK d t 1是数字信号±1计数误差造成的误差;F Π(2K )d t 2是阀门的关闭时间造成的误差。
基于μC_OS-Ⅱ的Modbus_TCP消息的类令牌环实时响应算法

( , , ’ ) S c h o o l o f C o m u t e r S c i e n c e N o r t h w e s t e r n P o l t e c h n i c a l U n i v e r s i t X i a n 7 1 0 0 7 2, C h i n a p y y
/ N 4 3 1 2 5 8 T P C - I S S N 1 0 0 7 1 3 0 X -
计算机工程与科学
C o m u t e r E n i n e e r i n &S c i e n c e p g g
第3 6 卷第 9 期 2 0 1 4年9月 V o l . 3 6, N o . 9, S e . 2 0 1 4 p
自身良 好 的 实 时 性 , 在2 而 0 1 2 年 3 月 成 为 国 标, / / M o d b u s T C P 协议本身并不保证实时性 。μ C O S - 如 果能 I I是一个开源免费的嵌入式实时操作系统 , / 够在此 基 础 上 设 计 一 个 实 时 M 不仅 o d b u s T C P, 可以加速工业以太网在工业现场的应用 , 还可以大
) 文章编号 : 1 0 0 7 1 3 0 X( 2 0 1 4 0 9 1 6 6 2 0 6 - - -
/ / 基于 μ C O S I I的 M o d b u s T C P 消息的类令牌环实时响应算法 -
孙中豪 , 周兴社 , 张凯龙
( ) 西北工业大学计算机学院 ,陕西 西安 7 1 0 0 7 2
A t o k e n r i n l i k e r e a l t i m e r e s o n s e a l o r i t h m - - - g p g / / M o d b u s T C P m e s s a e b a s e d o nμ C O S I I o f - g
基于嵌入式Linux系统的Modbus协议的设计与实现

基于嵌入式Linux系统的Modbus协议的设计与实现基于嵌入式Linux系统的Modbus协议的设计与实现随着嵌入式计算机技术的飞速发展,工业自动化数据采集和监控系统,该系统采用的嵌入式微处理器为核心的新一代型高性能,适应良好,应用系统。
它满足了功能性,可靠性,成本,体积和功耗的严格要求,在工业自动化等应用系统,Modbus通信协议的广泛行业标准,并在大量的工业设备,包括DCS,可编程控制器,RTU和使用智能仪器等。
为了达到的嵌入数据监测的工业自动化应用软件,嵌入式数据采集监测平台下基于Modbus协议的Linux环境系统采集的需求,本文设计。
串行端口的Modbus协议是实现主,其中包括两种通信模式:ASCII和RTU的种。
因此,各种药膏协议的设备能够满足串行的Modbus通信。
在Modbus 的主此嵌入式平台实现稳定和可靠。
它在嵌入式数据监测自动化应用系统的新收购的前景良好。
关键词:嵌入式系统,嵌入式Linux,,Modbus协议;数据采集,监测和控制1简介Modbus是一种通讯协议,是一种由莫迪康公司推广。
它广泛应用于工业自动化,并已成为现实行业标准。
该控制装置或不同厂家的测量仪器可以链接到一个行业监控网络使用Modbus协议。
Modbus 通信协议的使用在诸如通信标准,包括PLC,DCS系统,RTU的,聪明的智能仪表等大量的工业设备。
随着嵌入式计算机技术的飞速发展,嵌入式数据采集监测系统,使用了高性能的嵌入式微处理器为核心,是一个重要的发展方向。
在嵌入式数据监控的嵌入式Linux环境下的工业自动化应用,一个Modbus主协议系统设计和收购的看法是,本文实现。
因此,通信设备,各种药膏协议能够满足串行的Modbus。
2 Modbus协议简介Modbus协议包括ASCII码,RTU和TCP传输模式,支持传统的RS - 232和RS - 422,RS - 485和以太网设备。
至于串口的Modbus 设备,控制器,在标准的Modbus网络记者可以建立在两个种传输模式:ASCII码模式或RTU模式。
基于ARM9和_C_OS_的Modbus通信协议的实现

Modbus通信协议已经非常广泛地应用于自动控 代码 、μC /OS2Ⅱ移植代码 。其中 μC /OS2Ⅱ移植代码
制和通信领域中 。通过此协议 ,控制器相互之间 、控制 包括 1个汇编文件 、1个 C程序文件和 1个头文件 [3 ] 。
器经由网络 (例如以太网 )和其它设备之间可以通信 。 这部分代码与微处理器相关 ,是移植的关键 。
}
3. 3 用户接口函数设计 ① 发送报文 RTU 帧函数 在执行发送帧处理函数 SendResponse 时 ,不应该
产生其它更高优先级的中断 ,暂停帧数据的发送 ,否则 当前报文 RTU 帧可能无效 。
1. 1 OS_CPU1H 文件的移植 在 OS_CPU1H 文件中定义与处理器相关 (实际上
是与编译器相关 ) 的数据类型和与处理器相关的宏 , 主要是进入临界区的 OS_ENTER _CR ITICAL 和退出临 界区的 OS_EX IT_CR ITICAL ,所以 ,还要通过相应的软 件中断处理代码来实现开 /关中断 。定义 OS_TASK_ SW ( )为软件中断函数 ,并通过相应的软件中断处理 代码 (调用 OSIntCtxSw函数 )来实现任务切换 。
Modbus RTU 主从通信传输模式状态图 。如图 2 所示 ,其中 t115、t315为定时器 。
图 1 主 2从查询回应周期 Fig. 1 M aster2slave inquire2response cycle
Modbus RTU 通信是通过 CRC 校验 (即循环冗余 校验 ) 。校验过程如下 [7 ] :
{ u Index = uchCRCLo ^ 3 Buff_addr + + ; ∥计算 CRC值
uchCRCLo = uchCRCH i ^ auchCRCH i[ u Index ];
MODBUS通讯协议及编程
MODBUS通讯协议及编程协议名称:MODBUS通讯协议及编程一、引言MODBUS通讯协议是一种常用的工业领域通信协议,用于在不同设备之间进行数据交换。
本协议旨在详细描述MODBUS通讯协议的标准格式和编程要求,以确保设备之间的通信正常稳定。
二、协议格式1. MODBUS通讯协议采用主从结构,主设备向从设备发送请求,从设备进行响应。
2. 请求帧格式:- 起始符:1字节,值为0xFF。
- 设备地址:1字节,范围为0-255,用于标识从设备。
- 功能码:1字节,用于指定请求的操作类型。
- 数据域:可变长度,包含具体的请求数据。
- CRC校验:2字节,用于检测数据传输的准确性。
3. 响应帧格式:- 起始符:1字节,值为0xFF。
- 设备地址:1字节,范围为0-255,用于标识从设备。
- 功能码:1字节,用于指定响应的操作类型。
- 数据域:可变长度,包含具体的响应数据。
- CRC校验:2字节,用于检测数据传输的准确性。
三、功能码1. 读取线圈状态(功能码:0x01):- 请求数据域:起始地址(2字节)、数量(2字节)。
- 响应数据域:线圈状态(可变长度)。
2. 读取输入状态(功能码:0x02):- 请求数据域:起始地址(2字节)、数量(2字节)。
- 响应数据域:输入状态(可变长度)。
3. 读取保持寄存器(功能码:0x03):- 请求数据域:起始地址(2字节)、数量(2字节)。
- 响应数据域:寄存器值(可变长度)。
4. 读取输入寄存器(功能码:0x04):- 请求数据域:起始地址(2字节)、数量(2字节)。
- 响应数据域:寄存器值(可变长度)。
5. 写单个线圈(功能码:0x05):- 请求数据域:线圈地址(2字节)、线圈状态(2字节)。
- 响应数据域:无。
6. 写单个保持寄存器(功能码:0x06):- 请求数据域:寄存器地址(2字节)、寄存器值(2字节)。
- 响应数据域:无。
7. 写多个线圈(功能码:0x0F):- 请求数据域:起始地址(2字节)、数量(2字节)、字节数(1字节)、线圈状态(可变长度)。
基于VC++的Modbus协议串口通信设计与实现
158串行通讯的距离从几米到几千米,传输线最少时只需一根即可实现通信,比较适合远距离通讯传输,在工业控制、测量设备以及远程监控中串行通讯广泛使用。
Microsoft Visual C++作为微软公司面向对象程序的开发平台,具有集成的开发环境,支持C、C++等编程语言。
ModBus协议在OSI七层参考模型中作为应用层协议,是全球最早应用于工业现场的总线协议。
目前,ModBus协议已经成为一种通用工业标准,不同设备通过ModBus协议可以组成工业网络,实现集中监控。
本设计针对V C ++开发平台设计并实现了基于ModBus协议的串口通讯软件。
1 串口通信原理1.1 串行通信的特点串口通信的特点是数据流在通讯传输线上逐位按顺序分时进行传输,每次通信双方传输一个数据位,也就是一个二进制数0或1,以最小单位二进制数0或1逐位进行传输。
串口通信分为三种传输模式,分别是全双工、半双工和单工,具体划分是按照数据流的方向划分,数据通常是在通信双方的二个站点之间点对点进行传输[1]。
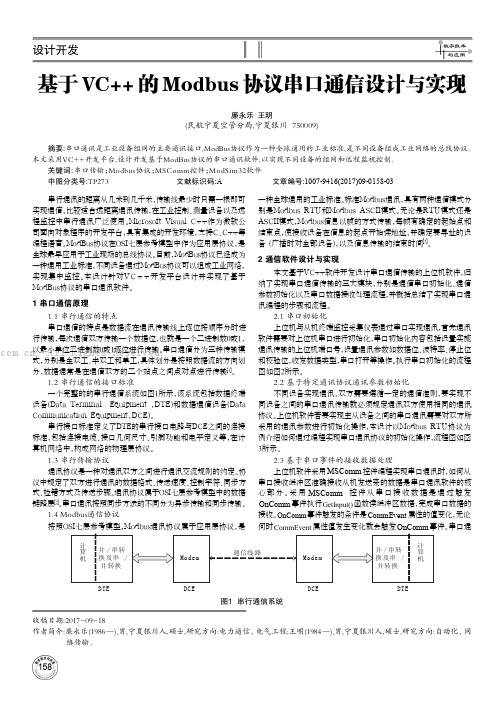
1.2 串行通信的接口标准一个完整的的串行通信系统如图1所示,该系统包括数据终端设备(Data Terminal Equipment ,DTE)和数据通信设备(Data Communication Equipment,DCE)。
串行接口标准定义了DTE的串行接口电路与DCE之间的连接标准,包括连接电缆、接口几何尺寸、引脚功能和电平定义等,在计算机网络中,构成网络的物理层协议。
1.3 串行传输协议通讯协议是一种对通讯双方之间进行通讯交流规则的约定。
协议中规定了双方进行通讯的数据格式、传送速度、控制字符、同步方式、检错方式及传送步骤。
通讯协议属于OSI七层参考模型中的数据链路层[2]。
串口通讯按照同步方法的不同分为异步传输和同步传输。
1.4 Modbus通信协议按照OSI七层参考模型,Modbus通讯协议属于应用层协议,是一种全球通用的工业标准。
基于μC-OS-II的Modbus协议测试系统

基于μC/OS-II的Modbus协议测试系统1 引言Modbus 协议最初由Modicon 公司开发出来,1979 年末该公司成为施耐德自动化(Schneider Automation)部门的一部分。
现在Modbus 协议已经是工业领域全球最流行的协议。
Modbus 协议为应用层报文传输协议,仅定义了通讯消息结构,一个Modbus 信息帧包括从机地址、功能码、数据区和数据校验码。
Modbus 协议支持传统的RS-232、RS-422、RS-485 和以太网设备。
许多工业设备,包括PLC、DCS、智能仪表等都在使用Modbus 协议作为它们之间的通讯标准。
为适应当前开发Modbus 设备过程中协议测试的需求以及Modbus 设备在线测试的需要,本文提出并实现了基于ARM 嵌入式处理器、μC/OS实时操作系统的Modbus 协议测试系统,并给出了系统的软硬件设计。
2 系统结构Modbus 协议测试系统硬件设计采用了工业级嵌入式处理器HMS30C7202 。
HMS30C7202 是Hynix 公司的高性能、低功耗32 位RISC 微处理器,它由ARM720T 内核和其他一些外围接口电路组成,工作频率为70MHz,支持8KB 的数据与指令Cache、2KB 的SRAM、支持段式和页式存储的MMU、写缓冲器及AMBA 接口。
HMS307202 采用0.25μm低功耗CMOS 工艺,片内电压2.5V,I/O 支持3.3V 电压,采用了256 管脚QFP/BGA 封装。
HMS30C7202 片上资源十分丰富,具有极高的集成度,非常适用于嵌入式系统应用,主要应用于PDA、智能电话、个人音频设备等场合。
测试系统提供了RS-232 和以太网接口,用于实现和被测Modbus 设备的联接。
系统RS-232 接口芯片采用。
modbus协议讲解及实现

modbus协议讲解及实现Modbus协议讲解及实现协议双方基本信息甲方:_____________(以下简称“甲方”)乙方:_____________(以下简称“乙方”)双方在自愿、平等、公正的原则下,达成如下协议:一、各方身份1. 甲方:作为Modbus从设备的使用方2. 乙方:作为Modbus主设备的提供者二、权利和义务甲方权利和义务:1. 使用乙方提供的Modbus主设备;2. 将Modbus协议用于其设备的通信;3. 保证提供的设备符合法律法规的要求;4. 保证提供的设备不侵犯他人的知识产权;5. 保证Modbus协议的使用符合中国相关法律法规。
乙方权利和义务:1. 提供符合规范标准的Modbus主设备;2. 保证提供的设备符合法律法规的要求;3. 保证提供的设备不侵犯他人的知识产权;4. 保证Modbus协议的使用符合中国相关法律法规。
三、履行方式1. 甲方使用乙方提供的Modbus主设备,使用相关协议进行通信;2. 乙方提供符合规范标准的Modbus主设备;3. 双方应当合作解决产品使用相关问题。
四、期限本合同有效期为2年,自双方签署之日起生效。
如需延长或解除,需双方协商确认并签订书面协议。
五、违约责任1. 任何一方未履行本协议的任何规定,应当承担相应的违约责任;2. 如因违约造成对方的经济损失,应当承担相应的赔偿责任。
六、法律效力和可执行性本合同在中国法律的管辖下,受中国法律保护。
双方应当遵守有关法律法规,解决任何争议应当协商解决。
如果无法协商解决,则提交有管辖权的人民法院处理。
以上协议内容经双方充分协商一致,双方认真阅读并同意行使签字权,自愿签订本协议。
本协议一式两份,甲乙双方各执一份。
甲方(签字):_____________乙方(签字):_____________ 签署日期:_____________。
Modbus 通讯协议编程

Modbus 通讯协议编程协议名称:Modbus 通讯协议编程一、引言Modbus 通讯协议是一种用于工业自动化领域的通信协议,常用于连接不同设备之间的数据交换。
本协议旨在规范Modbus通讯协议的编程实现,确保各种设备之间的数据传输准确、可靠和高效。
二、协议版本本协议基于Modbus通讯协议的最新版本进行编程实现,目前版本为Modbus协议v2.0。
三、通讯方式1. Modbus RTUModbus RTU是一种串行通讯方式,使用二进制编码进行数据传输。
通讯速率可根据实际需求进行配置,常见的包括9600bps、19200bps、38400bps等。
2. Modbus ASCIIModbus ASCII是一种基于ASCII码的串行通讯方式,使用可见字符进行数据传输。
通讯速率可根据实际需求进行配置,常见的包括9600bps、19200bps、38400bps等。
3. Modbus TCP/IPModbus TCP/IP是一种基于以太网的通讯方式,使用TCP/IP协议进行数据传输。
通讯速率可根据实际需求进行配置,常见的包括10Mbps、100Mbps、1000Mbps等。
四、数据格式1. Modbus RTU 数据格式Modbus RTU 数据帧由起始符、地址、功能码、数据、CRC校验码组成。
具体格式如下:起始符:1个字节,固定为0xFF。
地址:1个字节,表示设备地址。
功能码:1个字节,表示读取或写入数据的功能。
数据:根据功能码的不同,数据长度可变。
CRC校验码:2个字节,用于检验数据帧的完整性。
2. Modbus ASCII 数据格式Modbus ASCII 数据帧由起始符、地址、功能码、数据、LRC校验码组成。
具体格式如下:起始符:1个字符,固定为冒号(:)。
地址:2个字符,表示设备地址。
功能码:2个字符,表示读取或写入数据的功能。
数据:根据功能码的不同,数据长度可变。
LRC校验码:2个字符,用于检验数据帧的完整性。
基于LC的Modbus通信协议的实现(可编辑).doc

基于LC的Modbus通信协议的实现(可编辑) 摘要:介绍了三菱FXN系列PLC在无协议通信方式下与基于DSb型数字温度传感器的STAD温度采集模块以Modbus协议通信,实现即时读取温度,并给出了相关程序。
随着C技术迅速发展,网络集成信息自动化正迅速应用到现场设备、控制中,现场总线控制系统正逐步取代传统的集散控制系统,其中Modbus现场总线协议在基于PLC的控制系统中得到了越来越广泛的应用在本系统中,以PLC为主机、温度采集模块为从机,完成对生产过程的自动控制、工业流程及工艺参数的显示、修改,根据PLC的无协议通信功能,用Modbus现场总线协议实现主机与从机的通讯。
本文基于某监控系统的设计,实现了三菱FXN系列PLC在无协议通信方式下与DSb型数字温度传感器的采集模块以Modbus协议通信,在电炉熔化工作过程中,对电炉、电容、冷却水等多点的温度实现巡检。
系统硬件组成温度监控部分系统的硬件由DSb型数字温度传感器、采集模块、FXN系列PLC、FXNBD、HITECH触摸屏组成,其结构如图所示。
图系统硬件组成DSb是世界上首个支持单线总线接口(wirebusinterface)的数字化温度传感器,单总线接口便于构建分布式的温度测控网络,数字化的输出提高了信号传输的可靠性,而且使外围电路大为简化。
DSb具有很高的适应性和性价比,其测温范围为~℃ ,测温精度为±℃,测温距离最大为m,测温方式使用线制,本系统使用的传感器排序方式为指定排序。
DSb内部主要有个数字部件:个温度传感器、个位的激光刻蚀ROM、字节高速暂存器ScratchpadRAM和字节EERAMROM上位数据是传感器的序列号。
暂存器确保数据的完整性,数据先被写入暂存器,并可以被读回数据经校验后,可以由拷贝暂存器命令传输到EERAM,以确保更改存储器时数据的完整性。
暂存器为个字节,第和第字节是温度编码的低字节和高字节第和第字节是温度编码的低字节和高字节的拷贝,第字节是配置寄存器,其值决定温度转换的分辨率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《装备制造技术》2009年第1期M odbus 协议是应用于电子控制器上的一种通用语言。
通过此协议,控制器相互之间及控制器经由网络与其他设备之间,可以进行通信。
M odbus 协议简单易理解,使用广泛,已经成为行业通用工业标准。
目前,基于ARM 的嵌入式控制器已经广泛应用,在这些嵌入式控制器上实现M odbus 协议,对于系统联网通信具有很重要意义。
uCOS_II 是一种可移植、可剪裁及可剥夺型的多任务实时内核(RTOS ),它提供了时间管理和信号量、消息邮箱、消息队列等任务间同步和通信的机制。
利用该内核的这些机制,设计实现M odbus 协议,可以大大提高系统的实时性和稳定性,并且易于使用。
M odbus 协议是主—从协议,仅一个主站(在同一时间)连接在总线上,一个或多个从站节点也连接在相同的串行总线上。
对采用M odbus 协议进行通信的控制器,在系统中主要配置为从站,对应与CS 模型中的服务器端,令主站实现机制与从站相类似,因此本文只详细论述M odbus 的从站协议的实现。
1Modbus 协议描述M odbus 协议是一个两层协议,对应与ISO 分层模型中的链路层和应用层。
M odbus 协议定义了一个独立于底层通信层的简单协议数据单元,在用于特定总线和网络上时,引入一些附加的域,从而构成应用数据单元。
M odbus 协议数据帧结构如图1所示。
其中,有效的从设备地址分配范围是1~247,功能码指示从站要执行何种操作,功能码之后是包含请求和回应参量的数据域,错误校验是报文内容执行冗余校验计算后的结果。
其中,校验计算根据采用的是RTU 或是ASCII 传输方式而分别选择CRC 校验或LRC 校验。
2Modbus 协议从站的实现从数据流的处理过程上分析,从站的实现分为链路层和应用层两个部分。
链路层负责接收字节信号,并判断是否接收完完整的数据帧数据,当接收完一帧数据时,链路层部分程序就向应用层发送一个信号量,进而应用层对数据帧进行处理。
另外,应用层处理完功能码要求之后,要反馈信息给主机,将信息发送给主机过程部分,也属于链路层实现功能。
因此,如何判断一帧数据接收完成和根据数据帧内容执行应用层功能,就是协议实现的最关键之处。
下面以周立功公司的EasyARM 2131硬件平台为例介绍其具体实现。
2.1EasyARM2131简介EasyARM 2131采用PHILIPS 公司基于ARM 7TDM I —S 核、单电源供电和LQFP64的LPC2131。
LPC2131拥有两个符合550工业标准的异步串行口(UART ),可以通过查询和中断两种方式收发数据,板上已经具有RS-232转换电路,可以直接与PC 机通信。
LPC2131还带有两个32位可编程定时/计数器2.2数据链路层的实现本层的目的仅为下一层应用层提供接收到的帧数据,接受到一帧数据后,发送多值信号量给帧数据处理任务。
为了保证接收数据能力,使用环形队列数据帧缓冲区,当每接收到一帧数据,就发送一次信号量。
数据CRC 校验由应用层负责,这样可以提高接收效率。
环形队列数据帧的结构如下:typedef struct{uint8OneFrame[M BS_ONE_FRAM E_NUM];//接收帧保存数组uint8OneFrameNum;//接收字节数}M BS_ONE_FRAM E;//数据帧的结构typedef struct{M BS_ONE_FRAM E RxBuffer[M BS_BUF_SIZE];M BS_ONE_FRAM E*RxFrameIn;//帧入口指针基于uCOS_II 的MODBUS 协议的实现方羽,梁广瑞,罗覃东(广西机电职业技术学院电气工程系,广西南宁530007)摘要:介绍了modbus 协议,并以EasyAR M2131为硬件平台,在uCOS_II 系统上按照网络分层思想逐层实现R TU 传输模式下modbus 从站协议栈的过程。
通过与组态王、力控组态软件通信连接,表明该实现实时性好、性能稳定。
关键词:uCOS_II ;Modbus 协议;信号量;组态软件中图分类号:TP316.2文献标识码:B文章编号:1672-545X (2009)01-0083-02收稿日期:2008-10-12基金项目:广西机电职业技术学院院级项目资金资助基于模糊控制算法的嵌入式中央空调控制器的研究[2006]07号作者简介:方羽(1977—),男(壮族),广西武鸣人,讲师,硕士,教师,研究方向:嵌入式技术、电力电子技术、先进控制算法。
地址功能码数据错误校验图1Modbus 帧结构M BS_ONE_FRAM E*RxFrameOut;//帧出口指针M BS_ONE_FRAM E*RxBufStart;//缓冲区起始地址M BS_ONE_FRAM E*RxBufEnd;//缓冲区未地址uint8RxFrameEntry;//进入缓冲区帧数}M BS_RX_BUF;//接收缓冲区数据结构M odbus 协议中,帧数据完整与有效的判断,是通过字节接收时间间隔来完成的。
如果两个字符之间的空闲间隔大于1.5个字符时间,那么认为报文帧不完整,应该丢弃这个报文帧。
如果两个字符之间的空闲间隔大于3.5个字符时间,则表示一帧已经结束,后一字符为后续帧第一个字符数据。
因此链路层主要由两个中断来负责,一个是UART 中断,负责字节信号的发送与接收,另一个是定时器中断1(定时器中断0已经用于操作系统内核调度),负责判断数据帧的有效与完整,其中定时器中断1中具有4路比较匹配中断,分别用3路比较匹配来定时1.5个字符时间、3.5个字符时间。
接收数据中的两个中断程序流程图分别如图2和图3所示。
2.3应用层的实现M odbus 应用层的实现对应于uCOS_II 中的一个任务,该任务的优先级根据系统的实时性要求来指定。
该任务完成的工作如下:在任务循环开始处等待接收数据帧发送完成的信号,接收到信号量之后,进入对数据的处理,依次是功能码处理、错误处理、发送反馈信息等。
任务流程图如图4所示。
M odbus 功能代码的处理使用下面的处理数组来实现。
这样就可以方便管理要实现的功能代码。
typedef struct{uint8Code;//功能代码uint8(*Function)(M BS_ONE_FRAM E*ptr);//指向该功能码处理函数}M BS_CODE_FUNCTION_ARRAY;//功能代码函数数据结构下面是数组定义的一部分:M BS_CODE_FUNCTION_ARRAY M BSCodeFuncArray [M BS_M AX_FUNCTION]={{0x01,M BSReadM ultiCoils},//读线圈{0x02,FSReadDiscreteInputs},//读离散量输入……}因此只要定义好功能代码函数并在应用层任务中添加下面代码,就可以实现功能代码的处理。
……for(i=0;i<M BS_M AX_FUNCTION;i++){//查询有效的功能代码if(M BSCodeFuncArray[i].Code ==*(ptr->OneFrame+1)){return M BSCodeFuncArray[i].Function(ptr);//调用该功能代码的处理函数}}……3结束语本实现已经与组态王、力控等组态软件无缝通信,并应用在中央空调嵌入式控制系统中。
运行结果表明该协议的实现可靠,能满足系统实时性的要求,并且易于使用。
其创新点是:从数据接收到数据处理的过程,基于实时内核uCOSII 的信号量机制,应用层实现使用一个任务来完成,能根据系统实时性的要求来改变任务优先级,因此系统具有很高的实时性。
数据帧长度是否超过规定长度?字节中断来缓冲区是否已满?是是否否把接收字节放入缓冲区开始1.5个字符中断计时中断退出处理放弃本帧数据图2UART 接收字节中断处理流匹配1.5个字符时间中断来关闭1.5个字符中断计数地址是否有效?CRC 校验是否通过?开始3.5个字符中断计时中断结束出口匹配3.5个字符时间中断来关闭3.5个字符中断计数调整帧入口指针发信号量给任务处理该帧中断结束出口是是否否图3T1.5、T3.5字符中断处理程序流程图等待有效帧信号量调用功能代码处理函数是否是广播帧?是是成功处理该帧?否否封装应答帧封装错误应答帧触发发送中断调整帧出口指针图4应用层任务流程图(下转第94页)进行检测,看其是否符合要求。
还可根据每种阀片上阀杆孔磨损的程度,来决定修理的方法,若有多台同型号的旧阀,可在几台之间进行检测和调配。
修后的阀,应在试验台上进行试验,也可将阀平放,在上面的两个孔中加满煤油,用秒表测量其油液泄漏的速度,以判断阀的密封程度。
(5)液压缸的修理。
液压缸内泄和外漏的原因:一是活塞杆(或柱塞)表面磨损严重或拉出沟痕,可用电镀或金属刷镀的方法修理;二是导向套的内表面磨损,因导向套价格较低,一般都是进行更换;三是液压缸缸体本身磨损严重或拉出深沟,或在缸体内壁上出现气蚀区域,这也可用刷镀工艺进行修复;四是活塞上密封胶圈磨损,此时更换即可。
内泄和外漏,都会使液压缸自动回缩,对装在车上的液压缸有3种检查方法:一是用百分表,将磁力表座吸附在液压缸活塞杆上,表针抵在缸筒的端面上,观察表针在发动机熄火15min (包括下面两种方法)前后的变化值,即是液压缸的回缩量;二是在伸出的活塞杆上用黄油粘上一条纸片,测量纸片上端至液压缸端部距离的变化量,也即是液压缸的回缩量;三是用一个可松开和锁紧的橡胶板锁紧在活塞杆上,测量方法与用纸片的测量方法相同。
上述检测方法,也是判断液压缸是否内泄及其程度的方法。
根据所测液压缸的回缩量,可以较精确地推算出活塞上密封件的磨损程度和设备的使用时间,若使用的时间很短,则可断定其密封是由于装配方法不当损坏的;这对于纠正错误的装配方法和判断液压缸内泄程度是非常有用的。
(6)清洗液压系统,过滤液压油。
液压油污染,是工程机械出现故障的主要原因,约占80%的比重。
因此,必须对液压油进行定期检查,条件简陋时可用120目的过滤网过滤;同时要定期对油箱和整个液压系统进行清洗,或者定期换油。
(7)对各操作、控制装置的调整和修理。
操作、控制装置包括各种手柄、按钮、油门踏板等,对于易松动的各处手柄要经常进行检查,看其有害的大小,重新调整或紧固其锁紧装置;磨损严重的零部件可以焊补或换件;对于电气类的开关或按钮,可调整触点的接触状态或换新件。
5结束语在工程机械的使用过程中,要经常注意检查发动机、轴承和各工作机构的运行状况,特别是声音、温度、油液清洁度等重要技术指标是否正常,并做好相关记录。
如有异常,要及时停止运行,开机检查,并向主管汇报异常和检测的具体情况,确定调整和维修方案,按正确、科学的方法进行调整和维修。