第05章 误差椭圆..
误差椭圆
2 E[∆x ] = E[( x− x)2 ] = E[( x − E(x)) 2 ] = σ x 2 2 E[∆y ] = E[( y− y)2 ] = E[( y − E( y)) 2 ] = σ y 2 ~
~
σ = σ +σ
p
ϕ
p′′
p′′′
∆ϕ
y
由广义误差传播律: 由广义误差传播律
Qϕϕ = Qxx cos2 ϕ + Qyy sin2 ϕ + Qxy sin 2ϕ
2 2 2 σϕ = σ 0 Qϕϕ = σ 0 (Qxx cos2 ϕ + Qyy sin2 ϕ + Qxy sin(2ϕ)
三、位差的极大值 E和极小值 F
上
E = σ QEE =
2 2 0
σ02
2
(Qxx + Qyy + K),
∆ψ = cosψ∆E + sinψ∆F Q = QEE cos2 ψ + QFF sin2 ψ + QEF sin 2 ψ ψψ
QEF = 0
Qψψ = QEE cos2 ψ + QFF sin 2 ψ
2 2 2 σψ = σ 0 Qψψ = σ 0 (QEE cos2 ψ + QFF sin 2 ψ ),
∧
Q∧ Q∧ Q∧ Q∧ Q∧ Q∧
∧
X1 X i
∧
X1Y i
∧
L Q∧ L Q∧ L
∧
X1 X u
∧
Y1 Y1
Y1 X i
Y1 Y i
Y1 X u
测绘中的误差分析方法与误差控制技巧
测绘中的误差分析方法与误差控制技巧测绘是一门关于地理空间信息的科学与技术,广泛应用于土地、海洋、天文、地质等领域。
在测绘工作中,误差是难以避免的,因为测量和计算过程中存在着人为和物理因素的不确定性。
因此,误差分析和误差控制成为测绘工作中至关重要的一环。
本文将介绍测绘中常用的误差分析方法和误差控制技巧。
一、误差分析方法1. 精度评定法精度评定法是一种常用的误差分析方法,它通过对同一地物或同一空间点的多次测量,计算其测量结果之间的差异,从而得出误差的大小。
其中,常用的统计指标有平均值、标准差、方差等。
通过对统计量的计算和分析,可以获得测量数据的精度情况,并进一步优化测绘结果。
2. 最小二乘法最小二乘法是一种基于平方误差的数学优化方法,它通过最小化剩余误差的平方和来拟合观测数据和模型之间的关系。
在测绘中,最小二乘法经常用于平差计算和数据拟合。
例如,在地形测绘中,通过最小二乘法可以得到地形曲线的最佳拟合线,提高测绘的精度和可靠性。
3. 误差椭圆法误差椭圆法是一种基于误差椭圆模型的误差分析方法。
在测绘中,我们通常使用误差椭圆来描述测量结果的误差范围和方向。
误差椭圆的长轴表示最大误差,短轴表示最小误差,椭圆的倾斜角表示误差的方向。
通过对误差椭圆的计算和分析,可以确定误差的大小和方向,从而更好地控制误差。
二、误差控制技巧1. 仪器校准仪器校准是测绘中重要的误差控制技巧之一,它可以消除或减小仪器的系统误差。
在测绘之前,需要对仪器进行定期的校准,以确保其工作状态和精度。
校准的方法包括对仪器的零位、灵敏度、非线性等进行检测和校准,以使仪器的测量结果更加准确和可靠。
2. 环路闭合环路闭合是一种常用的误差控制技巧,它通过对测量数据进行环路检查,判断误差是否超过容许范围。
在测绘中,常用的环路闭合方法有边际平差闭合、法方程闭合等。
环路闭合可以有效控制误差的传播和积累,提高测绘结果的精度和可靠性。
3. 测量网平差测量网平差是一种基于误差传播原理的误差控制技巧,它通过将所有的观测数据和约束条件一起进行优化计算,得出最优解。
误差椭圆的定义
误差椭圆的定义嘿,朋友们!今天咱来聊聊误差椭圆呀!你说这误差椭圆,就好像是个调皮的小精灵,在测量的世界里蹦来蹦去。
想象一下哈,我们在测量一个东西的时候,就像是在黑暗中摸索,总会有些许偏差,而这个误差椭圆呢,就是把这些偏差给圈起来,告诉我们大致的范围。
它可不是随随便便就出现的,那是经过一番计算和琢磨才现身的呢!比如说我们要确定一个点的位置吧,实际测出来的可能就不是那么精准,会有这儿一点儿偏差,那儿一点儿偏差。
这时候误差椭圆就跳出来啦,说:“嘿,别担心,这个点大概就在我圈的这个范围里哦!”是不是很神奇?它就像是给我们测量结果加上了一个边界,让我们心里有个底。
就好比你要去一个地方,有人告诉你大概就在这一片儿,总比啥都不知道好吧!而且啊,误差椭圆还挺有个性的呢!它的大小和形状会根据不同的情况而变化。
有时候它扁扁的,有时候又圆圆的,就像个会变形的小怪物。
这可都是根据测量的数据来决定的呀!咱再打个比方,误差椭圆就像是一个神秘的领地,我们知道它的大致范围,但里面具体的情况还得我们去慢慢探索。
这探索的过程可有意思了,每一次测量都像是在给这个领地绘制更详细的地图。
你说要是没有误差椭圆,那我们测量出来的东西不就像没头苍蝇一样,不知道到底准不准确啦?它可是给我们指明了一个方向,让我们能更好地理解和处理测量的结果。
在实际应用中,误差椭圆可重要了呢!比如在建筑工地上,工程师们得靠它来确保建筑物的位置准确无误;在地图绘制中,它能帮助绘制出更精确的地图。
没有它,那可真是乱了套了呀!总之呢,误差椭圆这个小家伙虽然有时候让人有点头疼,但它确实是我们测量工作中不可或缺的好帮手呀!它让我们在面对不确定性的时候,能有个大概的把握,不至于两眼一抹黑。
所以啊,咱可得好好认识它、了解它,让它为我们的工作和生活发挥更大的作用呀!你们说是不是这个理儿呢?。
测量平差---误差椭圆
( )
2 1
tan 2ϕ0 =
2Qxy ˆˆ Qx −Qy ˆ ˆ
=
2×0.36 = 0.81818 3.81−2.93
13 /40
2 ϕ0 =39°17′或219°17′, ° 或 ° ϕ0=19°39′或109°39′ ° 或 °
主页
误差椭圆
ˆˆ 因为 Qxy > 0 故 ,
黑龙江工程学院
1 2 3 4 5 6 7 8 9
tan 2ϕ0 =
2Qxy Qx −Qy
2 2 σϕ =σ0 (Qx cos2 ϕ0 +Qy sin 2 ϕ0 +Qxy sin 2ϕ0 )
2 =σ0 (Qx cos2 ϕ0 +Qy sin 2 ϕ0 +Qxy ⋅
极值方向的判别方法: 极值方向的判别方法 Qxy >0,极大值在第Ⅰ、Ⅲ象限 ,极小值方向在第Ⅱ、 极小值方向在第Ⅱ ,极大值在第Ⅰ 8 /40 Qxy,极大值在第Ⅱ 象限, 象限; <0,极大值在第Ⅱ、Ⅳ象限,极小值方向在 Ⅳ象限; 象限。 第Ⅰ、Ⅲ象限。
______
= cosϕ∆x + sin ϕ∆y
∆x ∆x = [cosϕ sin ϕ] ∆y
由协方差传播律得: 由协方差传播律得 或
2 2 2 σϕ =σx cos2 ϕ +σy sin 2 ϕ +σxy sin 2ϕ 2 2 σϕ =σ0 Q ϕ
7 /40
2 =σ0 Qx cos2 ϕ +Qy sin 2 ϕ +Qxy sin 2ϕ
主页
2 2 2 2 2 σP =σx +σ y =σs +σu ―点位方差计算式
误差椭圆
黑龙江工程学院
05第五章误差椭圆
第一节
概述
控制点的平面位置是用一对 平面直角坐标来确定的。 平面直角坐标来确定的。坐标是由 观测值的平差值计算所得的, 观测值的平差值计算所得的,因此 不可避免地带有误差。 不可避免地带有误差。 在图4 在图4-12中 12中,A 为已知点, 为已知点,假设 它的坐标是不带有误差的数值, 它的坐标是不带有误差的数值,P 为待定点的真位置, 为待定点的真位置,P为由观测值 通过平差所求得的最或然点位, 通过平差所求得的最或然点位,在 待定点P 待定点P的这对坐标之间存在着误 差,由图知 ∆x = ~ x − x (4 − 89) ~ ∆y = y − y
4-14点位真误差 14点位真误差PP 点位真误差PP’在ϕ方向上的投影值 为PP'''。 PP'''。 由图4 由图4-14可以看出 14可以看出∆ϕ与 ∆x, ∆y的关系为
∆ϕ = PP ' ' + PP ' ' PP ' ' = cos ϕ∆x + sin ϕ∆y
返回目录
根据协因数传播律得
即为求方向 ϕ 的位差时的权倒数。 的位差时的权倒数。类似于( 类似于(4-94) 94)式,若 以 Qϕϕ 乘以单位权方差 σ 02,即得
E ( x) = a0 + aE ( L) = a0 + aL = x , E ( y ) = β + βE ( L) = β + βL = ~ y,
0 0
根据方差的定义, 根据方差的定义,并顾及( 并顾及(4-90) 90)式,则有
返回目录
a 0 = E[( E ( x) − x) 2 = E[( ~ x − x ) 2 E [ ∆x 2 ] a 2 = E ( E ( y ) − y ) 2 = E[ ~ y − y ) 2 = E [ ∆y 2 ]
误差椭圆
测绘通报. 1989,(4):9-13.
④ 许才军, 刘大杰. 广义相对误差椭球(圆)[J]. 武汉测绘科技大学学报. 1990,15(2):19-27.
谢谢
误差椭圆
ERROR ELLIPSE
0 引言
① 水平面内沿中线方向的长度偏差 ② 水平面内垂直于中线的左右偏差 ③ 垂直面内垂直于腰线的上下偏差
目录(INDEX)
点位误差
误差曲线
误差椭圆
相对误差椭圆
1 点位误差
点位误差的表示 坐标真误差: 点位真误差: 由平差结果的无偏性可知:
根据方差的定义:
两边取期望:
4 相对误差椭圆
设两点间的坐标差:
写成矩阵形式:
按权逆阵传播定律:
4 相对误差椭圆
4 相对误差椭圆
导线测量网相对误差椭圆
Байду номын сангаас
小结
• 点位误差
坐标轴方向 径向方向 任意方向 存在极值
• 误差曲线
反映点位误差在 各个方向的位差 形象、直观 不规则、麻烦
• 误差椭圆
误差曲线的近似 规则化形状 能够直接量取任 意方向的位差
1 点位误差
点位误差的表示
用中误差表示:
1 点位误差
点位误差的方向与极值
展开得
1 点位误差
点位误差的方向与极值
(1)大小取决于权倒数和旋转角的大小
(3)上式有极值存在
1 点位误差
点位误差的方向与极值
2 误差曲线
0
330 2.5 2 30
0 2.00
30 2.34
60 2.23
误差椭圆的三个参数
误差椭圆,也被称为置信椭圆或测量误差椭圆,是在统计学和测量学中广泛使用的一个概念。
主要用于表示二维数据点的分布、测量误差的范围或不确定性。
它由三个主要参数定义:中心、主轴和次轴。
中心:这是误差椭圆的几何中心,代表了所有测量数据的平均位置或最可能的位置。
在理想的情况下,如果我们有无限精确的测量设备,所有的测量数据都会落在这个点上。
然而,在现实世界中,由于各种因素的影响,如设备误差、环境噪声等,测量数据通常会在这个点附近分布。
主轴:主轴是误差椭圆的长轴,代表了数据点分布的主要方向。
它的长度通常被定义为包含一定比例(例如,68%,95%或99%)测量数据的椭圆的半径。
这个比例的选择取决于我们对误差的容忍度或我们对数据的信心水平。
主轴的方向也是非常重要的,因为它可以告诉我们哪些因素对测量结果的影响最大。
次轴:次轴是误差椭圆的短轴,与主轴垂直。
次轴的长度代表了数据点在垂直于主轴的方向上的分布范围。
与主轴一样,次轴的长度也被定义为包含一定比例测量数据的椭圆的半径。
如果次轴的长度小于主轴的长度,这意味着测量数据在主轴方向上的变化比在次轴方向上的变化更大,也就是说,某些因素对测量结果的影响较小。
这三个参数共同定义了误差椭圆,为我们提供了一个直观的方式来理解和表示二维测量数据的不确定性或误差范围。
通过分析和比较不同误差椭圆的这三个参数,我们可以更好地理解我们的测量系统的性能,找出可能的改进方向,以及更准确地解释我们的测量结果。
误差椭圆.
仿式(3.5-3)可得
2 P
(x23 .5-4)y2
这说明,尽管点位真误差△P
在不同坐标系的两个坐标轴上的投
影长度不等,但点位方差 总P2 是等 于两个相互垂直的方向上的坐标方
差之和,即它与坐标系的选择无关。
图3.5-2
如果再将点P的真位差△P投影于AP方向和垂直于AP的
方向上,则得 s和 (见u 图3.5-1), 、s 为点u 的纵向误差和 横向误差,此时有
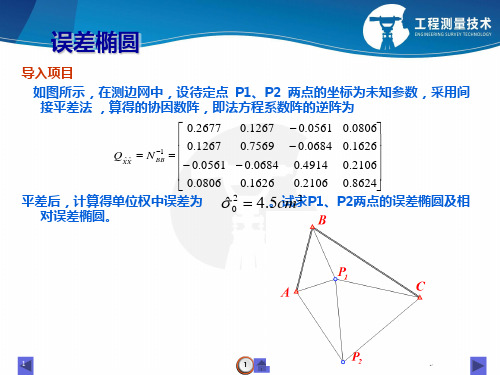
(2)计算P2点的误差椭圆的元素
由
tan 20
2Qxˆ2 yˆ2 Qxˆ2 - Qyˆ2
2 0.2106 -1.1353 0.4912 - 0.8624
得
= E624.33
14
14
误差椭圆
K2
(Qxˆ2
- Qyˆ2
)2
4Q 2 xˆ2 yˆ2
0.561
E2
1 2
给出后,可根据这个图得到坐标平差值在任一方向的位差大
小。如图3.5-6为控制网中P点的点位误差曲线,A、B、C为已
知点。由图3.5-6可知,
,
,
xP
Pa
,
yP Pb
E Pc E
F Pd F
由图还可得到坐标平差值函数的中
误差。例如要想得到平差后方位角
垂直P的A 于中P误A方差向上,的可P位A 先差从Pg图,中这量是出 PA
2
2
误差椭圆
知识准备
1.点位真误差 在测量中,为了确定待定点的平面直角坐标,通常需进
行一系列观测。由于观测值总是带有观测误差,因而根据观
测 而值不,是通 待过 定平点差 坐计 标算 的所 真获 值得~x,的是~y。待定点坐标的平差值 xˆ , yˆ,
第章误差椭圆

将 φ +90°代入式(5-13)得
(5-3)或式(5-6)计算点位中误差。
P2 x2 y2 P2 s2 u2
(5-3) (5-6)
2 点位误差及其计算
由定权的基本公式可知
2 x
2 0
1 px
2 0
Q
xx
2 y
2 0
1 py
2 0
Q
yy
(5-7)
代入式(5-3)可得
P 2x 2y 20 2(Q x xQ yy)
(5-8)
PP
Δy
平差位置
PPPP
Δx 真实Δ位x置cos φ
xcosysin
点位真误差
cos sinxy
Δφ 点位真误差在方位角为 φ方向上的投影
(5-11)
也可按以下方法求φ方向的位差
Pcos(0) P(coscos0 sinsin0) Pcos0 cosPsin0 sin xcos ysin
第五章 误差椭圆
1 §1 点位真误差及点位误差 2 §2 误差曲线与误差椭圆 3 §3 相对误差椭圆
教学目的
通过本章的学习,能熟练地求出任意方
向 (或 )上的位差;根据待定点坐标平差
值协因数阵,准确地计算误差椭圆、相对误 差椭圆的三个参数并画出略图,了解误差椭 圆在平面控制网优化设计中的作用。
1 §1 点位真误差及点位误差
1 点位真误差
在测量中,为了确定待定点的平面直角坐标,通常需进
行一系列观测。由于观测值总是带有观测误差,因而根据观
测值平差计算所获得的是待定点坐标的平差值 xˆ , yˆ ,而不是
待定点坐标的真值 x%, y% 。
平差位置
如图5-1中,A为已知点,假定其
误差椭圆在精密工程中的应用
误差椭圆在精密工程中的应用我跟你说啊,这误差椭圆在精密工程里啊,那可是个挺奇妙的东西呢。
我就见过那些精密工程的地儿,到处都是那种锃亮的仪器,那仪器摆放得整整齐齐的,周围的人啊,一个个都神情严肃,眼睛紧紧盯着那些数据和设备。
就像一群虔诚的信徒,在对待一件无比神圣的事儿。
我当时就好奇,这误差椭圆到底咋在这精密工程里发挥作用的呢?后来我就跟一个老师傅唠这个事儿。
老师傅那脸啊,就像老树皮似的,满是皱纹,可眼睛却特别有神。
他看了我一眼说:“嘿,你这小年轻还对这感兴趣呢。
”我就笑着说:“老师傅,我这不是好奇嘛。
”老师傅就吧嗒了一口烟,缓缓地说:“这误差椭圆啊,就像一个无形的网,在精密工程里,到处都有它的影子。
”你想啊,精密工程里,那每个零件的尺寸、每个设备的安装位置,都得精确到不能再精确。
哪怕是一丁点儿的误差,都可能让整个工程出大问题。
这误差椭圆呢,就能把那些可能出现的误差给圈出来,就像给那些误差画了个地盘儿一样。
比如说,在制造一个超精密的小零件的时候,这个零件可能只有手指头尖儿那么大,但是它上面的纹路啊,构造啊,复杂得很。
这误差椭圆就能告诉工程师,在哪个方向上可能会出现误差,误差大概有多大。
就好像是给工程师提个醒儿,让他们在那些容易出岔子的地方啊,多上点心。
我又问老师傅:“那这个误差椭圆咋就能知道哪儿会出错呢?”老师傅把烟掐了,眼睛一瞪说:“这可就是学问喽。
这得根据那些复杂的计算,根据以往的经验,还有工程里的各种条件。
比如说啊,这个工程里的温度、湿度,甚至是机器的震动,这些都会影响到最后的结果。
这误差椭圆啊,就像一个聪明的小侦探,把这些因素都考虑进去,然后给你指出来,哪个地方可能有危险。
”我听了就直点头。
在那些精密工程的车间里,每一个人都像是在和误差椭圆合作。
工程师拿着图纸,眼睛在图纸和实际的零件或者设备之间来回瞅,心里肯定也在想着误差椭圆给的那些信息。
那些工人呢,手上干着活儿,也得时刻注意着别超出误差椭圆规定的范围。
误差椭圆
第十章——误差椭圆
2 令: K (Qxx Q yy ) 2 4Qxy K为算术平方根,恒大于零。 1 则有: Q Q xx Q yy K 2 用E表示位差的极大值,F表示位差的极小值,则有: 1 2 2 2 E 0 Q E E 0 Q xx Q yy K 2 (5) 1 2 2 2 F 0 Q F F 0 Q xx Q yy K 2 (5)式就是计算位差极大值与极小值的实用公式。
第十章——误差椭圆
(7)式和(8)式就是用极值E、F计算纵横坐标中误差 的公式。 若规定任何方向都由E 轴起算,则纵坐标轴X相对于E轴 的方位角为 360 E (如图)。故(7)式可写为:
2 x E 2 cos2 (360 E ) F 2 sin 2 (360 E )
第十章——误差椭圆
GPS 网 三 维 无 约 束 平 差 误 差 椭 圆
第十章——误差椭圆
GPS 网 三 维 无 约 束 平 差 误 差 椭 圆
第十章——误差椭圆
§10-5 相对误差椭圆
在平面控制网中,绘出各待定点的位误差椭圆后,就可应用点位误 差椭圆图解各待定点与已知点之间的边长中误差与方位角中误差。 但不能用同样的方法图解待定点与待定点之间的边长中误差与方位 角中误差。而在实际工作中,重要的却是任意两个待定点之间的相 对精度。为此,有必要研究任意两个待定点之间的相对精度问题。 设有任意两个待定点 为:
第十章——误差椭圆
极值方向
当
当
tan 2 0
2Qxy Qxx Q yy
Qxy 0 时,极大值在一、三象限;
Qxy
极小值在二、四象限。 时,极大值在二、四象限; 0 极小值在一、三象限。
相对误差椭圆一般绘制在

差s和横向误差u
A
,则有:
O
2 P
2 s
2 u
2 P
2 s
2 u
y P'
u
x
s
P
s
y
10.1 点位误差
3、点位中误差
(1)利用纵、横坐标协因数计算点位误差
2 x
2 y
21 0 px 21 0 py
2 0
Q
xx
02Q
yy
2 p
1
c
os 2
20
Qyy
1 cos20
2
Qxy sin 20 )
1 2
(Qxx
Qyy ) (Qxx
Qyy ) cos20
2Qxy sin 20
(Qxx Qyy ) cos 20 2Qxy sin 20
(Qxx Qyy )2 4Qxy2 sin(20 )
Qxy 0,E 在一、三象限,F 在二、四象限 Qxy 0,E 在二、四象限,F 在一、三象限
例:已知某平面控制网中待定点坐标平差参数
xˆ、yˆ 的协因数为
dm 2
1.236 0.314
QXˆXˆ 0.314
1.192
其单位为
秒
,并求得
ˆ 0 1,试用两种方法求 E
10.1 点位误差
E(2
P
)
E(2x
)
E(2y
)
第26讲误差曲线与误差椭圆
的位差 ( 呈8字形,且关于轴和轴对称)
所以这条曲线称之为点位误差曲线。位差 向任意两个垂直方向投影,有许多种不同
结果,E,F是两个长度差最大的方向位差。
Hale Waihona Puke 、误差曲线误差曲线与误差椭圆
2、误差曲线的应用 (1)误差曲线在工程上应用非常广泛,当控制 网略图和待定点的误差曲线给出后,可根据这 个图得到坐标平差值在任一方向的位差大小。 如右图ABC三点为已知点。P点在X、Y、E、F 4个方向的位差可以通过该图表示出来,结 果如下: xp Pa, yp Pb,E Pc E,F Pd F (2)由图还可以得到坐标平差值函数的中误差。如想要得到平差
低了它的实用价值。由于误差曲线形状与以E、F为长半轴和 短半轴的椭圆相似,实用上以椭圆代替,这个椭圆称为点位
的误差椭圆, E、E、称F为点位误差椭圆的参数。椭圆方程为: ,即Ex误22 差Fy椭22 圆 1分别以E、F为长短半轴。
误差曲线与误差椭圆
二、误差椭圆
误差椭圆的向径不再是P点在该方向的误差,但只要在垂直于 该方向上作椭圆的切线,则垂足与原点的连线长度即该方向 上位差。每一个待定点可作一个误差曲线或误差椭圆。
在目前普遍采用计算机计算和绘图 的条件下,可以直接采用误差曲线, 不必采用误差椭圆,并且图解的方 法已经不再适用。 上面的讨论都只针对一个待定点, 确定该点的误差曲线和误差椭圆。
误差曲线与误差椭圆
谢 谢!
后方位角P的A 中误差,可以先从图上量取垂直于PA方向上的位
一、误差曲线
误差曲线与误差椭圆
差Pg,这是PA边的横向误差
,则由下式可得
u
PA
计量经济学 第五章 误设定
第一节 模型误设定:类型及后果
采用OLS 法估计模型时,实际上有一个隐含 的假设,即模型是正确设定的。这包括两方面的 含义:函数形式正确和解释变量选择正确。在实 践中,这样一个假设或许从来也不现实。我们可 能犯下列三个方面的错误: • 选择错误的函数形式 • 遗漏有关的解释变量 • 包括无关的解释变量 从而造成所谓的“误设定”问题,误设定 (misspecification)亦称设定误差(specification error)。
1 1
ˆ1 )=1 +2 • 事实上,可以证明: E(
(5-13)
ˆ X ,因此, ˆ 0 ) 1 3 X 2 • 同样道理,可以证明 E ( 1 ˆ1都 ˆ0和 如果遗漏变量与模型中的变量相关,则 是真实参数的有偏估计量,还可以进一步证明 和 都是不一致的,即无论样本容量有多大,偏差都不 会消失。同时,根据式5-10得到的误差方差是真实 误差方差的有偏估计量,从而,的方差也是真实估 计量的方差的有偏估计量。因此,参数估计的置信 区间和假设检验过程都不再可靠。
1981
1982 1983 1984 1985 1986 1987 1988 1989
4891.561
5323.351 5962.652 7208.052 9016.037 10275.18 12058.62 15042.82 16992.32
4472.276
4877.324 5406.659 6227.175 7065.738 7690.8 8581.645 9549.705 9937.729
不难看出,这是一个仅存在变量非线性的模型, 很容易用重新定义的方法将其线性化。 双曲函数模型的特点是,当 X 趋向无穷时, Y 趋 向 0 ,反映到图上,就是当X趋向无穷时,Y将无 限靠近其渐近线(Y= 0 )。 双曲函数模型通常用于描述著名的恩格尔曲线和 菲利普斯曲线。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Q Qxx cos 2 2Qxy sin cos Q yy sin 2 Qxx cos 2 Q yy sin 2 Qxy sin 2
而待定点P在φ方向上的位差可用下式得到
2 2 0 Q 2 0 (Qxx cos 2 Q yy sin 2 Qxy sin 2 )
zqz99@
(Q xx Q yy ) 4Q
2
2 xy
(5-20)
位差的极大值和极小值为
E 0 QEE F 0 QFF
(5-21) (5-22)
因为两个极值方向相互垂直,故
2 E2 F 2 0 (QEE QFF ) 2 0 (Qxx Q yy ) 2 P
zqz99@
(5-13)
由式(5-13)可知σ 2φ的大小与方位角φ有关 。在所有方向 的位差权倒数中,必有一对权倒数取得极大值和极小值,分 别设为 QEE和QFF ,而相应的方向分别设为φE和φF ,其中在
φE方向上的位差具有极大值,而在φF 方向上的位差具有极
小值,很显然, φE和φF两方向之差为90°。
由图可知点位真误差PP ′在φ方向上的投影值为 PP′″,且:
PP
Δy
平差位置
PP PP x cos y sin
Δx
Δxcos φ 真实位置
x cos sin y Δφ 点位真误差在方位角为 φ方向上的投影 (5-11)
测量工作中通常用点位中误差σP来衡量待定点的精度,
只要我们求出它在两个相互垂直方向上的中误差,就可由式 (5-3)或式(5-6)计算点位中误差。
2 2 2 P x y
2 2 P s2 u
(5-3)
(5-6)
第五章 误差椭圆
zqz99@
2 点位误差及其计算
QXX
(5-10)
主对角线上的元素就是待定点坐标平差值 的权倒数
第五章 误差椭圆
zqz99@
3 任意方向上的位差 平差时,我们一般只求出待定点的坐标中误差σx、σy
和点位中误差σP。
点位中误差虽然可以用来评定待定点的点位精度,但 是它却不能代表该点在某一任意方向上的位差大小。而上 面提到的σx、σy、σs、σu等,也只能代表待定点在 x轴 和 y 轴 方向上以及AP边的纵向和横向上的位差。但在有些情况下, 往往需要研究点位在某些特殊方向上的位差大小。此外还 要了解点位在哪一个方向上的位差最大,在哪一个方向上 的位差最小,例如,在工程放样工作中,就经常需要关心
由于 sin(90 ) cos cos(90 ) sin sin(180 ) sin
2 2 2 2 故 ( Q si n Q cos Qxy sin2 ) 90 0 xx yy 2 2 0 (Qxx cos2 Qyy sin2 Qxy sin 2 )
(5-4)
第五章 误差椭圆
zqz99@
纵向误差Δu 纵向误差Δs
这说明,尽管点位真误差ΔP在不同坐标系的两个坐标轴上的投 影长度不等,但点位方差总是等于两个相互垂直的方向上的坐标方 差之和,与坐标系的选择无关。
如果再将点P 的真位差ΔP投影于AP方向和垂直于AP的方向上,
则得点P 的纵向误差Δs和横向误差Δu,此时有:
值协因数阵,准确地计算误差椭圆、相对误
差椭圆的三个参数并画出略图,了解误差椭
圆在平面控制网优化设计中的作用。
第五章 误差椭圆
zqz99@
1
§1 点位真误差及点位误差
1 点位真误差 在测量中,为了确定待定点的平面直角坐标,通常需进
行一系列观测。由于观测值总是带有观测误差,因而根据观
ˆ, y ˆ ,而不是 测值平差计算所获得的是待定点坐标的平差值 x
第五章 误差椭圆
zqz99@
根据协因数传播律得 Q FQXX F T
cos
Qxx sin Q yx
Qxy cos Q yy sin
cos Qxy cos Q yy sin sin Qxx cos 2 Q yx sin cos Qxy sin cos Q yy sin 2 Qxx cos Q yx sin
由定权的基本公式可知
1 2 0 Q xx px 1 2 2 2 y 0 0 Q yy py
2 2 x 0
(5-7)
代入式(5-3)可得
2 2 2 2 P x y 0 (Qxx Qyy )
(5-8)
从间接平差我们知道:当以待定点的坐标作为未知参数 进行坐标平差时,法方程系数阵的逆阵就是未知参数的协因
任意方向上的位差问题。
第五章 误差椭圆 3.1 用方位角表示任意方向的位差
zqz99@
如图5-3,P为待定点的真实位置,P′为待定点的平差位置。 为了求待定P点在方位角为 φ的方向上的位差,先找出待定点P 在该方向上的真误差Δ φ与纵、横坐标的真误差Δx、Δy的函数关系;
然后求出该方向的位差。
第五章 误差椭圆
zqz99@
第五章 误差椭圆
zqz99@
第五章 误差椭圆
1 §1 点位真误差及点位误差
2
§2 误差曲线与误差椭圆
3
§3 相对误差椭圆
第五章 误差椭圆
zqz99@
教学目的
通过本章的学习,能熟练地求出任意方
向 (或 )上的位差;根据待定点坐标平差
数阵,其主对角线上的元素就是待定点坐标平差值 x、y 的权
倒数,而非主对角上的元素则是它们的相关权倒数。
第五章 误差椭圆
zqz99@
当平差问题中只有一个待定点时
QXX N
1 BB
Qxx ( B PB ) Q yx
T 1
Qxy Q yy
(5-9)
ΔP 2= Δs2 + Δu2
(5-5)
第五章 误差椭圆
zqz99@
写成中误差的形式为
2 2 P s2 u
(5-6)
测量工作中也常常通过纵、横向误差来求定点位误差。
上述的σx和σy分别为点在x轴和y轴方向上的中误差,或
称为 x 轴和 y 轴方向上的位差。同样,σs和σu是点在AP边的 纵向和横向上的位差。
【解】
2 K (Q xx Q yy )2 4Qxy 0.707
QEE QFF
1 (Q xx Q yy K ) 2.20 2 1 (Q xx Q yy K ) 1.50 2
E 0 QEE 1.48dm F 0 QFF 1.22dm
(5-14) (5-13)
将(5-13) 和(5-14)两式相加,即得
2 2 2 2 ( Q Q ) 90 0 xx yy P
(5-15)
上式表明:任何一点的点位方差总是等于两个相互垂直 方向上的方差分量之和。
第五章 误差椭圆
2 2 0 (Qxx cos2 Qyy sin2 Qxy sin 2 )
为求QEE和QFF,可利用协因数阵(5-9),因为QEE和QFF就是
这个协因数阵特征值的两个根。由线性代数中特征方程求特征根
的方法,可求得
QEE QFF
1 (Qxx Q yy K ) 2 1 (Qxx Q yy K ) 2
(5-16)
(5-17)
第五章 误差椭圆
2 式中 K (Q xx Q yy ) 2 4(Q xx Q yy Q xy )
第五章 误差椭圆
zqz99@
QEE Qxx 2.20 2.10 tan E 0.4 , E 22 Qxy 0.25 由于Qxy 0.25 0 , 极大值在第Ⅱ、Ⅳ象限 故: E 158 或 E 338 QFF Qxx 1.50 2.10 tan F 2.4 , F 68 Qxy 0.25 由于Qxy 0.25 0 , 极小值在第Ⅰ、Ⅲ象限 故: F 68 或 E 248
(5-1)
x2 y2
真位差在坐标轴上的投影。
(5-2)
Δx,Δy为真位差在 x 轴和 y 轴上两个位差分量,也可理解为 设Δx , Δy的中误差为σx , σy , 考虑Δx与Δy互相独立,对式(5-2) 进行误差传播,可得点P真位差ΔP的方差为
待定点坐标的真值 x , y 。
平差位置
如图5-1中,A为已知点,假定其
坐标是不带误差的数值。P为待定点的 真位置,P’点为经过平差所得的点位,
两者之距离为ΔP , 称之为点位真误差,
简称为真位差。由图可知,在待定点
真实位置
的这两对坐标之间存在着误差
ˆ x x x ˆ y y y
当平差问题中有s 个待定点时
Qx1 x1 Q y1 x1 Q x2 x1 Q y2 x1 Qxs x1 Q ys x1 Qx1 y1 Q y1 y1 Qx2 y1 Q y2 y1 Qxs y1 Q ys y1 Qx1 x2 Q y1 x2 Q x2 x2 Q y2 x 2 Q x s x2 Q y s x2 Qx1 y2 Q y1 y2 Q x 2 y2 Q y2 y2 Q x s y2 Q y s y2 Qx1 xs Q y1 xs Q x2 x s Q y2 x s Q xs xs Q ys xs Qx1 ys Q y1 ys Q x2 y s Q y2 y s Q x s ys Q ys ys
Qxy <0,极大值在第Ⅱ、Ⅳ象限,极小值方向在第 Ⅰ、Ⅲ象限。