基于RBF网络的多变量系统自适应预测PID控制器
基于RBF神经网络的PID控制在变风量空调系统中的应用

基于RBF神经网络的PID控制在变风量空调系统中的应用瞿睿;李界家【摘要】The RBF neural network in PID control was introduced,a three-layer neural network model was established,the online identification of RBF neural network to online adjust three parameters of PID control was used to improve the control effect of this system.The simulation results showed that compared PID control based on RBF neural network with traditional PID control,the former has stronger robustness and adaptive ability,high control precision,better and reliable control effect and other advantages.%将RBF神经网络引入PID控制中,建立了一个三层神经网络模型。
通过RBF神经网络的在线辨识对PID控制的三个参数进行在线调整,从而改善系统的控制效果。
仿真结果表明:基于RBF神经网络的PID控制与传统PID控制相比,具有较强的鲁棒性和自适应能力,控制精度高,效果好,安全可靠。
【期刊名称】《现代建筑电气》【年(卷),期】2012(000)002【总页数】4页(P10-13)【关键词】变风量空调系统;RBF神经网络;PID控制【作者】瞿睿;李界家【作者单位】沈阳建筑大学信息与控制工程学院,辽宁沈阳110168;沈阳建筑大学信息与控制工程学院,辽宁沈阳110168【正文语种】中文【中图分类】TU8550 引言变风量空调(Variable Air Volume,VAV)系统是一种节能效果显著的全空气系统。
基于S函数的RBF神经网络PID控制器

基于径向基函数的神经网络的PID控制器摘要RBF神经网络在分类问题中得到了广泛的应用,尤其是模式识别的问题。
许多模式识别实验证明,RBF具有更有效的非线性逼近能力,并且RBF神经网络的学习速度较其他网络快。
本文在具有复杂控制规律的S函数构造方法的基础上,给出了基于MATLAB语言的RBF神经网络PID控制器,及该模型的一非线性对象的仿真结果。
关键词:S函数;RBF神经网络PID控制器;Simulink仿真模型径向基函数(RBF-Radial Basis Function)神经网络是由J.Moody和C.Darken 在20世纪80年代末提出的一种神经网络,它具有单隐层的三层前馈网络。
由于它模拟了人脑中局部调整、相互覆盖接受域(或称野-Receptive Field)的神经网络结构,因此,RBF神经网络是一种局部逼近网络,已证明它能以任意精度逼近任意连续函数。
1.S函数的编写方法S函数是Simulink中的高级功能模块,Simulink是运行在MATLAB环境下用于建模、仿真和分析动态系统的软件包。
只要所研究的系统模型能够由MATLAB语言加以描述,就可构造出相应的S函数,从而借助Simulink中的S 函数功能模块实现MATLAB与Simulink之间的沟通与联系,这样处理可以充分发挥MATLAB编程灵活与Simulink简单直观的各自优势。
当系统采用较复杂的控制规律时,Simulink中没有现成功能模块可用,通常都要采用MATLAB编程语言,编写大量复杂而繁琐的源程序代码进行仿真,一是编程复杂、工作量较大,二来也很不直观。
如果能利用Simulink提供的S函数来实现这种控制规律,就可以避免原来直接采取编程的方法,不需要编写大量复杂而繁琐的源程序,编程快速、简捷,调试方便,则所要完成的系统仿真工作量会大大减少。
RBF神经网络PID控制器的核心部分的S函数为:function [sys,x0,str,ts]=nnrbf_pid(t,x,u,flag,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0) switch flag,case 0, [sys,x0,str,ts] = mdlInitializeSizes(T,nn);case 2, sys = mdlUpdates(u);case 3, sys = mdlOutputs(t,x,u,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0);case {1, 4, 9}, sys = [];otherwise, error(['Unhandled flag = ',num2str(flag)]);endfunction [sys,x0,str,ts] = mdlInitializeSizes(T,nn)sizes = simsizes;sizes.NumContStates = 0; sizes.NumDiscStates = 3;sizes.NumOutputs = 4+5*nn; sizes.NumInputs = 9+15*nn;sizes.DirFeedthrough = 1; sizes.NumSampleTimes = 1;sys=simsizes(sizes); x0=zeros(3,1); str=[]; ts=[T 0];function sys = mdlUpdates(u)sys=[u(1)-u(2); u(1); u(1)+u(3)-2*u(2)];function sys = mdlOutputs(t,x,u,T,nn,K_pid,eta_pid,xite,alfa,beta0,w0)ci_3=reshape(u(7: 6+3*nn),3,nn); ci_2=reshape(u(7+5*nn: 6+8*nn),3,nn);ci_1=reshape(u(7+10*nn: 6+13*nn),3,nn);bi_3=u(7+3*nn: 6+4*nn); bi_2=u(7+8*nn: 6+9*nn);bi_1=u(7+13*nn: 6+14*nn); w_3= u(7+4*nn: 6+5*nn);w_2= u(7+9*nn: 6+10*nn); w_1= u(7+14*nn: 6+15*nn); xx=u([6;4;5]);if t==0ci_1=w0(1)*ones(3,nn); bi_1=w0(2)*ones(nn,1);w_1=w0(3)*ones(nn,1); K_pid0=K_pid;else, K_pid0=u(end-2:end); endfor j=1: nn % Gaussian basis hh(j,1)=exp(-norm(xx-ci_1(:,j))^2/(2*bi_1(j)*bi_1(j)));enddym=u(4)-w_1'*h; w=w_1+xite*dym*h+alfa*(w_1-w_2)+beta0*(w_2-w_3); for j=1:nnd_bi(j,1)=xite*dym*w_1(j)*h(j)*(bi_1(j)^(-3))*norm(xx-ci_1(:,j))^2;d_ci(:,j)=xite*dym*w_1(j)*h(j)*(xx-ci_1(:,j))*(bi_1(j)^(-2));endbi=bi_1+d_bi+alfa*(bi_1-bi_2)+beta0*(bi_2-bi_3);ci=ci_1+d_ci+alfa*(ci_1-ci_2)+beta0*(ci_2-ci_3);dJac=sum(w.*h.*(-xx(1)+ci(1,:)')./bi.^2); % JacobianKK=K_pid0+u(1)*dJac*eta_pid.*x; sys=[u(6)+KK'*x; KK; ci(:); bi(:); w(:)];该控制器中的外部参数均在封装后的控制器参数对话框中给出。
基于自适应权值神经网络的PID参数优化

基于自适应权值神经网络的PID参数优化摘要:针对常规RBF神经网络训练速度慢、控制精度不高的问题,文章提出一种基于自适应遗传优化的RBF 神经网络方法,并把优化后的方法用于PID控制器的参数整定中。
仿真实验表明,改进后的方法具有更快的响应速度和控制精度,有效提高了PID控制器的性能。
关键词:自适应遗传算法;RBF神经网络;比例-积分-微分(PID)中图分类号:TP183随着工业的进一步发展,各种控制系统越来越复杂,此时应用对象的参数是随系统需求的变化而动态改变的,传统PID控制器已经不能适应社会的需求。
近年来,在工业控制领域也出现了神经网络PID控制,神经网络技术的应用,大大提升PID控制器的性能。
文献[1][2]讨论了RBF网络在PID 参数整定中的应用,取得了一定效果。
一般情况下,PID控制器参数的设定多采用梯度下降法来实现,这就造成网络适应力不强,无法对被控制对象进行实时、精确的控制。
针对RBF网络在进行PID参数整定时所存在的这些问题,文章提出一种基于自适应权值的RBF神经网络用于PID参数的整定。
仿真结果表明,改进后的RBF神经网络具有更好的适应性,能有效提升PID控制器的性能。
1 基于自适应遗传优化的RBF神经网络概述1.1 RBF神经网络的基本原理典型的RBF神经网络是一种具有隐含层的前馈神经网络[2],该网络一般具有三层,分别是输入层、隐含层和输出层。
网络基本的结构如图1所示。
现有的理论研究证明,RBF 神经网络是一种逼近网络,它对任意非线性函数都有很好的鲁棒性和适应性。
但RBF神经网络以梯度下降法为基础的网络参数寻优模式,使得它存在训练时间长、易于陷入局部极小值的问题[3]。
图1 RBF神经网络结构图1.2 自适应遗传算法[4]GA算法是一种仿生算法,它主要由选择算子、交叉算子以及变异算子来实现,是一种高效的全局搜索算法,它不依赖具体领域,只要给出目标函数,算法就能利用自身的染色体自动寻找问题的最优解,具有很强的鲁棒性。
基于RBF神经网络与Smith预估补偿的智能PID控制
基于RBF神经网络与Smith预估补偿的智能PID控制王菲菲;陈玮【期刊名称】《计算机工程与应用》【年(卷),期】2012(048)016【摘要】Aiming at the phenomena of big time delay are normally exist in industry control, this paper proposes an intelligent RBF-Smith-PID control based on RBF neural network algorithm and Smith predictive compensation algorithm and traditional PID controller. This method uses the ability of online-study, a self-turning control strategy of RBF neural network, and better control of Smith predictive compensation to deal with the big time delay, overcome the limitation of traditional PID control effectively, improve the system's robustness and self-adaptability, get satisfactory control to deal with the big time delay system.%针对工业控制中普遍存在的大滞后现象,提出了一种将RBF神经网络算法和Smith预估补偿算法与传统的PID控制器相结合的智能RBF-Smith-PID控制策略.该方法利用RBF神经网络的在线学习、控制参数自整定能力,和Smith预估补偿对纯滞后系统的良好控制,有效地克服了常规PID控制的缺陷,提高了系统的鲁棒性和自适应性,对纯滞后系统起到了良好的控制.【总页数】4页(P233-236)【作者】王菲菲;陈玮【作者单位】上海理工大学光电信息与计算机工程学院,上海200093;上海理工大学光电信息与计算机工程学院,上海200093【正文语种】中文【中图分类】TP13【相关文献】1.基于Smith预估补偿与RBF神经网络的PID控制在工业平缝机脚踏板调速模块中的应用 [J], 何臻祥;肖忠2.基于Smith预估补偿与RBF神经网络的改进PID控制 [J], 王宝忠;宋冬锋;刘卫法3.基于Smith预估补偿的RBF神经网络的锅炉燃烧系统解耦控制 [J], 高锦;李勇;周燕弟;章家岩4.基于两级Smith预估补偿的加热炉温度串级控制 [J], 李康康5.一种基于模糊RBF神经网络的Smith预估器 [J], 沈洁;刘贺平;许鸣珠因版权原因,仅展示原文概要,查看原文内容请购买。
基于RBF神经网络的TCSC自适应PID控制
1 引言
随着“ 西 电东送 、 南北互供 、 全 国联 网” 电力发 展战略 的 实施 , 远距离 、 超高压 、 大 容量 跨 区域的交 流输 电在 我 国将 会越来越普遍 , 然而远距 离交 流输 电 的容量 常常受 到稳 定
极 限的制 约| 】 ] 。可 控 串联 电容 补 偿 ( T h y r i s t o r c o n t r o l l e d s e r i e s c a p a c i t o r , TC S C) 技 术 是 一 种 提 高 远 距 离 交 流 输 电 系
随着国内外学者 对 TC S C控制 策略研 究 的不 断深 入 , 控制 理论 中的各种最新成果都在 T C S C的控制 中得到 了广
泛 的研究 l g 。文献 [ 9 ] 采用 基于微 分几何理 论 的反馈线 性化 理论设计 了 T C S C控 制器 , 文献 [ 1 O ] 基于 非线性 最优 预测 控制理论设计 T C S C控制 , 都取得不错 的控制 效果 , 但
基于RBF神经网络整定的Smith-PID控制及其应用

∆ki
= −η ∂E ∂ki
= −η ∂E ∂y
∂y ∂u
∂u ∂ki
=
ηe2
(k)
∂y ∂u
xc(2)
∆k d
= −η ∂E ∂k d
= −η ∂E ∂y ∂u ∂y ∂u ∂kd
=
ηe 2
(k)
∂y ∂u
xc(3)
式中, ∂y 为被控对象的 Jacobian 信息,可通过神经网络的辨识而得。 ∂u
LIU Yong, ZHAO Zi-xian (College of Sciences and Technology, Inner Mongolia University Hohhot 010021, Inner Mongolia. ) Abstract: Aiming at the big delayed time, big burthen fluctuating and mutable characteristic of the controlled object, combining Smith compensated theory with self-adaptive tuning method of PID parameter, the RBF neural network tuning Smith-PID controlling policy is presented,that is in the Smith estimator control, makes use of RBF NN self-learning tuning the PID parameter on line, achieving optimal non-linear fabrication and overcoming the defect of conventional Smith-PID controller. The results of simulation and actual application indicate the algorithm has a strong robustness and better controlling character. Keywords: RBF NN; Smith-PID; two-volumes water tank liquid 1 引言 在工业过程(如热工、化工)控制中,由于物料或能量的传输延迟,许多被控对象具有 纯滞后性质,针对大时滞时变对象的控制,把Smith预估补偿控制原理和PID调节控制方法结 合起来,提出了基于RBF网络整定Smith-PID控制算法,即在Smith补偿控制系统中,运用RBF 神经网络在线自学习整定PID参数,使既相互配合又相互制约的比例、积分和微分控制作用, 实现最佳的非线性组合,以期适应对象特性的变化。文献[1]提出了基于BP算法整定的基于 Smith-PID控制算法,但是BP网络用于函数逼近时,权值的调节采用的是负梯度下降法,这 种调节权值的方法有它的局限性,即存在着收敛速度慢和易陷入局部极小值。而径向基函数 网络无论在逼近能力、分类能力和学习速度等方面均优于BP网络[2],因此本文采用RBF网络。 2 施密斯(Smith)预估控制原理[3] 施密斯预估控制原理是:与 D(s)并接一补偿环节,用来补偿被控制对象中的纯滞后部
基于RBF神经网络电液伺服系统智能控制的在线辨识与PID参数自适应整定34页PPT

② 当 e k 0 ,e k e k 1 ,本次误差大于上次误差,此时应减少 步长,放慢搜索速度。
神经网络辨识技术
神经网络系统辨识实质上是选择一个适当的神经网络模 型来逼近实际系统的数学模型。
本课题,首先建立单通道电液位置伺服控制系统的数 学模型,然后根据该模型获取被控系统的输入输出数 据。
在实际生产过程中,对象的特性和模型随时都在变化 ,只不过变化比较缓慢而已。整定和优化好的PID,在 一段时间后,就可能不再有很好的控制效果。
为了使生产过程始终保持良好的控制效果,就要对PID 控制器的参数进行在线调整和优化。
分析。
➢ RBF神经网络学习算法
① 确定隐层个数L,m个径向基函数的中心向量c,基函数 宽度b,从隐层到输出层的各连接权w。
② 根据经验选取中心,L个中心应具有“代表性”。
③ 采用梯度下降法确定RBFNN的输出权w,节点中心c及节 点基宽度b,选取算法如下:
w j k w j k 1 y k y m k h j w j k 1 w j k 2
系统辨识的原理 就是通过调整辨 u
RBF在线辨识与PID参数自适应整定
RBF神经网络结构及其学习算法
➢ RBF神经网络隐层节点函数的选择 高斯函数: fxex p x 2 b c 2 j 2 ,j 1 ,2 ,3 ...,m
函数优点: ① 表示形式简单,即是对于多变量输入也不增加太多的复
杂性; ② 竞相对称; ③ 光滑型号,任一阶导数均存在; ④ 由于该基函数表示简单其解析性好,因而便于进行理论
基于RBF神经网络电液伺服系统智能控制 的在线辨识与PID参数自适应整定
基于RBF神经网络的参数自适应PID变桨控制器的设计
电力系统及其自动化学报Proceedings of the CSU-EPSA Vol.32No.5 May2020第32卷第5期2020年5月基于RBF神经网络的参数自适应PID变桨控制器的设计张真源1,刘国荣1,杨小亮2,刘科正1,邓争3(1.湖南工程学院风电装备与电能变换协同创新中心,湘潭411104;2.湖南大学电气与信息工程学院,长沙410082;3.湘潭大学信息工程学院,湘潭411101)摘要:自然界风速的多变性与风机变桨系统的迟缓性会导致风机输出功率的不稳定。
为了改善风机输出功率的稳定,首先基于RBF神经网络RBFNN(radial basis function neural network),以功率差作为信号来源,设计了RBF-PID自适应变桨控制器,建立了风力机及变桨距机构仿真模型。
其次,建立了2种风况模型,较好地模拟了自然界基本风况。
仿真表明:在不同风况下对比常规模糊控制与PID控制,RBF-PID参数自适应方法在风速波动较大的情况下能够更好地稳定输出功率,且减小了变桨的幅值与频率,增加了风机的寿命。
关键词:径向基神经网络;变桨距;参数自适应;功率稳定中图分类号:TP277文献标志码:A文章编号:1003-8930(2020)05-0016-08DOI:10.19635/ki.csu-epsa.000296Design of RBF Neural Network Based Parameter Adaptive PID Pitch Controller ZHANG Zhenyuan1,LIU Guorong1,YANG Xiaoliang2,LIU Kezheng1,DENG Zheng3(1.Wind Power Equipment and Power Conversion Collaborative Innovation Center,Hunan Institute of Engineering,Xiangtan411104,China;2.College of Electrical and Information Engineering,Hunan University,Changsha410082,China;3.College of Information Engineering,Xiangtan University,Xiangtan411101,China)Abstract:The variability of natural wind speed and the sluggishness of a wind turbine pitch-regulated system lead to the instability of wind turbine output power.To solve this problem,based on a radial basis function neural network(RB⁃FNN),an RBF-PID adaptive pitch controller is designed with power differences as the signal source,and a simulation model of wind turbine and pitch-regulated mechanism is established.Then,two kinds of wind speed models are estab⁃lished,which can better simulate the basic wind conditions in nature.Simulation results show that compared with the conventional fuzzy control and PID control,the RBF-PID parameter adaptive method can better stabilize the output pow⁃er and reduce the amplitude and frequency of pitch under larger fluctuations of wind speed,thereby improving the ser⁃vice life of the wind turbine.Keywords:radial basis function neural network(RBFNN);variable pitch;parameter adaptive;power stability随着技术的不断发展,风电渗透水平在不断提高,大规模的风电并网严重考验大电网的稳定性。
基于RBF神经网络的PID控制系统优化控制研究
1 引言
泄洪系统的控制技术虽然有了较好发展,但在复杂的工 作环境条件下,控制系统的控制性能还需要进一步提升,主 要表现在控制的灵敏度,故障处理不及时则会对泄洪系统产 生严重的影响。因此泄洪系统的对控制系统的稳定性、可靠 性要求比较高。经实践研究,PID 控制能够较精确和快速的实 现对闸门液压启闭机的控制,使闸门控制系统稳定运行。但 是由于液压启闭机具有非线性特性,在不同的阶段模型是变 化的,所以 PID 参数无法较好的实现系统在整个运行过程中 的精确控制,输出响应存在一些波动,且在某些运行区域很 难达到良好的控制效果。为解决该问题,本文采用 RBF 神经 网络进行 PID 参数优化来实现对液压启闭机的优化控制。
息之间的灵敏度变化情况:
(3-7)
式中
。
结合 RBF 分析的数据,PID 控制系统能够实时的调整学
习到的控制参量,自动实现对 PID 参量的调整和矫正,从而
达到较高的控制水平,并且能够满足控制要求。通过采用数
字 PID 控制算法(增量式)进行控制误差 e 计算,计算如下:
(3-8)
48 CWT 中国水运 2019·09
DOI 编码:10.13646/ki.42-1395/u.2019.09.018
基于 RBF 神经网络的 PID 控制系统 优化控制研究
张强 1,安小刚 2 (1. 黑龙江水运建设发展有限公司,黑龙江 哈尔滨 150020;2. 交通运输部水运科学研究院,北京 100088)
摘 要:液压启闭机运行工况复杂、本身具有非线性特性,普通 PID 参数无法较好地实现系统在整个运行过程中的精
1.4
Input
1.2
PID Control RBF PID
1
Output
基于RBF神经网络的PID自校正控制研究
基于RBF神经网络的PID自校正控制研究作者:朱逢锐林玉娥来源:《电脑知识与技术》2016年第25期摘要:针对传统的自校正PID控制器不能有效的实现工业工程中非线性系统、不确定性系统的在线参数的整定和实时控制作用,提出了一种基于径向基(RBF)神经网络的PID自校正控制方法,并分别用自校正PID控制和基于RBF神经网络的PID自校正控制进行系统仿真实验,仿真结果表明:基于RBF神经网络的PID自校正控制方法可以根据非线性系统、不确定系统对象的变化完成参数的在线动态修正,同时也增强了系统的自适应调整能力。
关键词:PID自校正控制;非线性系统;自适应控制;RBF神经网络中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2016)25-0155-03Abstract: The setting of on-line parameter and real-time control of the non-linear system and non-determinable system in industrial engineering could not be resolved by means of traditional self-turning PID controller, consequently a new method of PID self-turning control based on RBF neural network was proposed in this paper. PID self-turning control and PID self-turning control based on RBF neural network were used to for system emulation experiment, respectively. The results showed that PID self-turning control based on RBF neural network can achieve on-line dynamic modification of the parameters according to the non-linear system and the alteration of uncertainty system object. At the same time, the ability of self adapting adjustment was enhanced.Key words: PID self-turning control; non-linear system ; adaptive control; RBF neural network1 概述传统的自校正PID控制是吸取了自校正控制的思想并将其与常规PID控制相结合应用工业工程中,在参数发生变化较小和对象受到的随机波动较小时,在一定程度上显示了参数的整定能力和系统的自适应能力,然而对于一些不确定性,特别是时变性和非线性的系统往往不能保证具有有效的控制特性[1,2]。
基于RBF神经网络的PID控制整定

基于RBF神经网络的PID控制整定作者:许笑梅赵东亚曹磊来源:《科技创新与应用》2019年第13期摘 ;要:基于RBF神经网络的PID控制整定分析,通过MATLAB构建CSTR对象模型,综合生产环境与各种干扰性因素,利用整定PID参数的方式进行控制分析,效果显著。
基于此,文章主要对基于RBF神经网络的PID控制整定的相关内容进行了简单的分析论述。
关键词:RBF神经网络;PID控制整定;CSTR中图分类号:TP273 ; ; ; ;文献标志码:A ; ; ; ; 文章编号:2095-2945(2019)13-0032-02Abstract: The PID control setting analysis based on RBF neural network, the CSTR object model is constructed by MATLAB, the production environment and various interference factors are integrated. The control analysis is carried out by setting PID parameters, and the effect is remarkable. Based on this, this paper mainly analyzes and discusses the related contents of PID control setting based on RBF neural network.Keywords: RBF neural network; PID control setting; CSTR1 基于RBF神经网络分析1.1 神经元基础模型分析单神经元主要就是模仿生物神经元的具体结构、功能,在数学角度对其进行描述的一种基本单位模式,通过人脑神经元进行抽象简化获得。
基于RBF神经网络整定的PID控制器设计及仿真_毕业设计(论文) 精品

华北电力大学毕业设计(论文)题目基于RBF神经网络整定的PID控制器设计及仿真系别专业班级学生姓名秦术员指导教师年月基于RBF神经网络整定的PID控制器设计及仿真摘要目前,因为PID控制具有简单的控制结构,可通过调节比例积分和微分取得基本满意的控制性能,在实际应用中又较易于整定,所以广泛应用于过程控制和运动控制中,尤其在可建立精确模型的确定性控制系统中应用比较多。
然而随着现代工业过程的日益复杂,对控制要求的逐步增高(如稳定性、准确性、快速性等),经典控制理论面临着严重的挑战。
对工业控制领域中非线性系统,采用传统PID 控制不能获得满意的控制效果。
采用基于梯度下降算法优化RBF神经网络,它将神经网络和PID控制技术融为一体,既具有常规PID控制器结构简单、物理意义明确的优点,同时又具有神经网络自学习、自适应的功能。
因此,本文通过对RBF神经网络的结构和计算方法的学习,设计一个基于RBF神经网络整定的PID控制器,构建其模型,进而编写M语言程序。
运用MATLAB软件对所设计的RBF神经网络整定的PID控制算法进行仿真研究。
然后再进一步通过仿真实验数据,研究本控制系统的稳定性,鲁棒性,抗干扰能力等。
关键词:PID;RBF神经网络;参数整定SETTING OF THE PID CONTROLLER BASED ON RBF NEURAL NETWORK DESIGN AND SIMULATIONAbstractAt present, because the PID control has a simple control structure, through adjusting the proportional integral and differential gain basic satisfactory control performance, and is relatively easy to setting in practical application, so widely used in process control and motion control, especially in the accurate model can be built more deterministic control system application. With the increasingly complex of the modern industrial process, however, increased step by step to control requirements (e.g., stability, accuracy and quickness, etc.), classical control theory is faced with severe challenges. Non-linear systems in industrial control field, using the traditional PID control can not obtain satisfactory control effect. Optimized RBF neural network based on gradient descent algorithm, it will be integrated neural network and PID control technology, with a conventional PID controller has simple structure, physical meaning is clear advantages, at the same time with neural network self-learning, adaptive function. Therefore, this article through to the RBF neural network structure and the calculation method of learning, to design a setting of the PID controller based on RBF neural network, constructs its model, and then write M language program. Using the MATLAB software to design the RBF neural network setting of PID control algorithm simulation research. Data and then further through simulation experiment, the control system stability, robustness, anti-interference ability, etc.Keywords: PID; RBF neural network; Parameter setting目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)1.1 课题研究背景及意义 (1)1.2神经网络的发展历史 (2)2 神经网络 (6)2.1神经网络的基本概念和特点 (6)2.2人工神经网络构成的基本原理 (6)2.3神经网络的结构 (7)2.3.1前馈网络 (7)2.3.2 反馈网络 (7)2.4神经网络的学习方式 (8)2.4.1监督学习(有教师学习) (8)2.4.2非监督学习(无教师学习) (8)2.4.3再励学习(强化学习) (9)2.5 RBF神经网络 (9)2.5.1 RBF神经网络的发展简史 (9)2.5.2 RBF的数学模型 (9)2.5.3被控对象Jacobian信息的辨识算法 (10)2.5.4 RBF神经网络的学习算法 (11)2.6 本章小结 (12)3 PID控制器 (13)3.1 PID控制器简介 (13)3.2 经典PID控制原理 (13)3.3 现有PID控制器参数整定方法 (15)3.4 PID控制的局限 (15)3.5本章小结 (15)4 基于RBF神经网络整定的PID控制器设计 (16)4.1 RBF神经网络的PID整定原理 (16)4.2 神经网络PID控制器的设计 (16)4.3 本章小结 (17)5 仿真分析 (18)5.1 系统的稳定性分析 (18)5.2 系统抗干扰能力分析 (19)5.3 系统鲁棒性分析 (20)5.4 本章小结 (22)结论 (23)参考文献 (24)致谢 (25)附录仿真程序 (26)1 绪论1.1 课题研究背景及意义PID控制器(按比例、积分和微分进行控制的调节器)是最早发展起来的应用经典控制理论的控制策略之一,是工业过程控制中应用最广泛,历史最悠久,生命力最强的控制方式,在目前的工业生产中,90%以上的控制器为PID控制器。
基于RBF神经网络的多变量系统PID解耦控制

基于RBF神经网络的多变量系统PID解耦控制
焦竹青;屈百达;徐保国
【期刊名称】《系统仿真学报》
【年(卷),期】2008(20)3
【摘要】针对工业生产过程中的多变量耦合系统采用传统控制方法不能达到满意的效果,提出了一种基于神经网络的PID解耦控制方案。
在实验研究中,采用改进型动态BRF神经网络辨识器,在线辨识多变量系统的非线性时变模型,同时自动调整PID控制器各项参数,最终实现对系统的智能化解耦控制。
给出了BRF神经网络的拓扑结构和算法,并对一组二变量强耦合时变系统的控制过程进行了计算机仿真,结果表明:基于BRF神经网络的PID控制不仅超调量小、响应速度快、控制精度高,而且具有很强的鲁棒性和自适应能力。
该设计方案使得解耦后的多变量系统具备了良好的动、静态特性。
【总页数】5页(P627-630)
【作者】焦竹青;屈百达;徐保国
【作者单位】江南大学通信与控制工程学院
【正文语种】中文
【中图分类】TP273
【相关文献】
1.基于模糊RBF神经网络整定的航空发动机多变量解耦控制
2.基于RBF神经网络逆系统的多变量解耦控制
3.基于RBF神经网络的烟叶烤房PID解耦控制
4.基于改
进型RBF神经网络多变量系统的PID控制5.基于RBF网络辨识的涡扇发动机双变量神经网络PID解耦控制
因版权原因,仅展示原文概要,查看原文内容请购买。
基于RBF神经网络的隧道掘进机推进自适应PID控制

基于RBF神经网络的隧道掘进机推进自适应PID控制宋立业;万应才【摘要】针对全断面隧道掘进机的推进压力和推进速度的匹配问题,应用RBF神经网络算法设计了使推进压力和推进速度匹配且推进速度能快速跟随设定目标的自适应控制器.先在MATLAB中建立推进控制系统仿真模型,分析控制器自适应控制效果,然后在AMESim中建立推进系统液压控制模型,并与MATLAB联合仿真.联合仿真验证该控制器能在刀盘负载压力波动突变的情况下,使刀盘推进速度和推进压力跟随设定目标.试验证明,该控制器对负载大范围扰动有很好的抑制能力,能明显提高推进速度和推进压力耦合度并减小两者的波动范围.%The matching problems for full cross section TBM thrust pressures and thrust speeds, the applications of RBF neural network algorithm were designed to make the thrust pressures and the thrust speeds matching and speed adaptive controller might quickly follow the set goals.The control-ler was simulated by MATLAB,and the hydraulic control model of propulsion systems was estab-lished in AMESim and co-simulation with MATLAB.By j oint simulation,the controller might make the cutter driving speeds and thrust pressures follow the set target when the cutter load pressures were abrupt.Experiments show that the controller has a good ability to suppress the load disturb-ances,and may improve the propulsion speeds obviously and push the pressure coupling degrees and reduce the fluctuation ranges of the both.【期刊名称】《中国机械工程》【年(卷),期】2017(028)014【总页数】7页(P1676-1682)【关键词】全断面隧道掘进机;液压控制;自适应控制;大扰动【作者】宋立业;万应才【作者单位】辽宁工程技术大学电气与控制工程学院,葫芦岛,125105;辽宁工程技术大学电气与控制工程学院,葫芦岛,125105【正文语种】中文【中图分类】TH137隧道掘进机(tunnel boring machine,TBM)利用旋转刀盘的滚刀挤压剪切破岩,通过旋转刀盘铲斗收集石渣,并由皮带运输到洞外。
RBF神经网络结合PID控制系统优化方案及应用实现
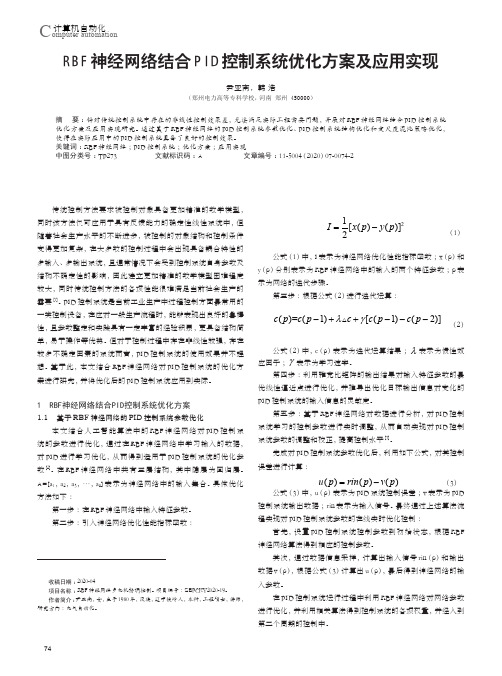
其次,通过数据信息采样,计算出输入信号 rin(p)和输出 数据 v(p),根据公式(3)计算出 u(p),最后得到神经网络的输 入参数。
在 PID 控制系统运行过程中利用 RBF 神经网络对网络参数 进行优化,并利用相关算法得到控制系统的各项权重,并经入到 第二个周期的控制中。
结合 RBF 神经网络改变原有 PID 控制系统的变尺度混沌策 略,首先改变系统初始化参数与初始追的选择策略,假设 p=0 表示为混沌变量的迭代标志,B1 为粗略搜索的次数,B2 为细致 搜 索 的 次 数,M=(p1,p2,p3,…,pn,g1,g2,g3,…,gm)表 示 为 PID 控制系统的所有控制参数集合,因此此时混沌变量的最优 值变为 M=(p1*,p2*,p3*…,pn*,g1*,g2*,g3*,…,gm*),则当前最 优目标函数的输出值应为集合中最大的数。假设在 [0,1] 区间当 中的任意 14 个相异的初值为混沌变量,则各个初始值当中选择
=I 1 [x( p) − y( p)]2
2
( 1)
公式(1)中,I 表示为神经网络优化性能指标函数 ;x(p)和 y(p)分别表示为 RBF 神经网络中的输入的两个特征参数 ;p 表 示为网络的迭代步骤。
第三步 :根据公式(2)进行迭代运算 :
c( p)=c( p −1) + λc + γ [c( p −1) − c( p − 2)] ( 2)
改进型变尺度 混沌优化策略
性能指标
-
+
PID1
DRNNI
-
+
被控制对象
图 1 优化后 PID 控制系统结构示意图
RBF网络自整定PID控制在网络化控制系统中的应用

RBF网络自整定PID控制在网络化控制系统中的应用葛锁良;杨旭玮;张亚东【摘要】Aiming at the universal problem of time delay in network control system (NCS), a control strategy based on radial basis function (RBF) neural network self-tuning PID is provided. A simulation model of NCS is established under the environment of TrueTime toolbox basedMatlab/Simulink. The simulation results indicate that compared with the traditional PID control, the RBF neural network self-tuning PID control can effectively improve the robustness and self-adaptability of the system, and can be applied to real projects easily.%文章针对网络化控制系统普遍存在的时延问题,介绍了一种基于径向基函数神经网络自整定PID的控制策略.在Matlab/Simulink环境下搭建了基于TrueTime工具箱的网络控制系统的仿真平台.仿真结果表明:与常规PID控制相比,神经网络自整定PID控制算法可有效地提高系统的鲁棒性和自适应性,且此方法易于实现,便于工程应用.【期刊名称】《合肥工业大学学报(自然科学版)》【年(卷),期】2011(034)010【总页数】4页(P1489-1491,1550)【关键词】RBF神经网络;网络化控制系统;网络诱导时延【作者】葛锁良;杨旭玮;张亚东【作者单位】合肥工业大学电气与自动化工程学院,安徽合肥230009;合肥工业大学电气与自动化工程学院,安徽合肥230009;合肥工业大学电气与自动化工程学院,安徽合肥230009【正文语种】中文【中图分类】TP273.2随着计算机网络的广泛应用和网络技术的不断发展,控制系统的结构正在发生变化。
基于RBF网络的自整定PID控制

2 RBF神经网络模型
• RBF网络结构如图2所示。
图2 RBF网络结构图 网络结构图
2 RBF神经网络模型
• 2.2 RBF神经网络的学习算法——最小二乘递 推法(RLS) • 设有p组输入/输出样本up/yp,定义目标函 数(L2范数):
1 J = ∑ d p − yp 2 p
2
1 = ∑∑ (d kp − ykp )2 2 p k
基于RBF网络的自整定PID控制 网络的自整定 控制 基于 网络
概要
• • • • 1 PID控制原理 2 RBF神经网络模型 3 RBF神经网络PID整定原理 4 仿真实例——基于RBF神经网络辨识的单 —— RBF 神经元PID模型参考自适应控制
1 PID控制原理
• 在工业控制中, PID控制是工业控制中最常用 的方法。这是因为PID控制器结构简单、实 现简单,控制效果良好,已得到广泛应用。据 统计,在目前的控制系统中,PID控制占了绝大 多数。但是,他具有一定的局限性:当控制对 象不同时,控制器的参数难以自动调整以适 应外界环境的变化。
2 RBF神经网络模型
• 2.1 RBF神经网络结构 • 径向基函数(Radial Basis Function,RBF)神经 网络是由J·Moody和C·Darken在20世纪80年 代末提出的一种神经网络,它是具有单隐 层的三层前向网络。由于它模拟了人脑中 局部调整、相互覆盖感受野(Receptive Field) 的神经网络,因此,RBF神经网络与BP网络 不同,是一种局部逼近网络,已证明它能 以任意精度逼近任意连续函数。
• 学习的目的是:
J ≤ε
2 RBF神经网络模型
1 J = ∑ d p − yp 2 p
2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工 业 生 产 过 程 中 , 滞 后 耦 合 系 统 屡 见 不 鲜 , 用 大 使 常 规 的 PD 控 制 器 难 以 达 到 理 想 的 控 制 效 果 。 而 调 整 I
PD控制 器 的参数 并 使其满 足 系 统 要求 则 往 往 需要 丰 I 富的经 验和 反复 的 尝试 , 作 量 大 而且 未 必 能 达 到 目 工 的, 这就 限制 了 PD控 制 器 的 广 泛 使 用 ¨ 。人 们 也 提 I
Ab ta t sr c :Ana a t eP D c nrl rw t pi l rdcinb sdo a il a i fn t n R d pi I o t l iho t e it ae nrda ss u ci ( BF) ew r s v oe ma p o b o n t ok ,whc ss i befr ihi ut l o a
维普资讯
第2 5卷 第 7期
20 0 8年 7 月
机
电
工
程
Vo . 5 1 2 NO 7 .
M ECHANI CAL & ELECTRI CAL ENGI NEERI NG AGAZI M NE
J1 u .20 08
基于 R F网络 的多变量 系统 自适 应 B 预 测 PD 控 制 器 水 I
出了许 多基 于 神 经 网 络 和 神 经 元 的 智 能 PD 控 制 算 I 法¨ , 如基 于 三层 B P网络 的 P D控 制 器 , 而 现有 I 然 各种 PD算 法 中 , 大 部分 是 基 于输 出一 步 预测 误 差 I 绝 为最 小优 化指 标 , 这种 单 步 最 优 指 标 的控 制 很 难 反 映 未来 时刻 过程 输 出 的动 态 变 化 规律 , 会 引起 控 制 信 常
p e it n,w ih i u e oo ec me t — ea ,a d PD c nrl rt du ti aa tro iet v ro o piga d rdci o hc s s dt v ro i d ly n I o tol oa js t p rmee n l o o ec me c u l n me e s n n
t e pr c s fn n ie r,mu t— a ibl ,o g tme dea n to g c u i g,wa r s ne h o e so o ln a liv ra e l n i — ly a d sr n o pln sp e e td. Th t o sc mpo e fo tm a e me h d i o s d o p i l
0 前
言
针对 以上 问题 , 本研 究 选 用递 推 多 步 预 测 控 制 与
P D结 合 的方 法来 处理 多 变量 、 时 滞 、 I 大 强耦 合 非 线性
对 象 ; 采用 运算 量 小 、 敛 性 快 、 局 部 极 小 的径 向 并 收 无 基 函数 网络 , 用 它对 被控 对 象在 线实 时辨 识 。 利
王 跃, 张世峰 , 宁方 青 , 秀珍 李
( 徽 工 业 大 学 电 气 信 息 学 院 , 徽 马鞍 山 2 3 0 ) 安 安 4 0 2
摘 要 : 对 非 线性 、 针 多变量、 大滞后 耦 合 系统 使 用常 规 P D控 制 难 以达 到 理 想 效 果 , 出 了一种 基 于 I 提
真 结果表 明 , 方 法控 制效 果 良好 , 该 具有较 快 的 系统 响应 、 强 的 自适 应 性和 鲁棒 性 。 较
关 键词 : 多步预 测 ; B R F网络 ;I 自适应 PD; 中图分 类号 : P 7 T 23 文献标 识 码 : A 文章编 号 :01 45 (08 0 09 — 4 10 — 5 120 )7— 09 0
c n r li u p . Th i o to t o t ut s e smulto e u t h w h tt o to lr h sa g o fe ta th v uik rr s o s pe d,sr n e a in rs ls s o t a he c nr le a o d ef c s i a e a q c e e p n e s e to g r a lc b l y a d r b sne s ppi a ii n o u t s . t Ke y wor ds:m ut— tp p e c in;RBF ne r ln t r lise r dito u a ewo k; PI ;a p ain D da tto
W ANG Yue,ZHANG h —e g, NI S if n NG n — i g,LIXi — h n Fa g q n uze
( c o l fE et c l n nom t n A h iU i r t o eh o g , ’ nh n2 3 0 , hn ) S h o o l r a d I r ai , n u nv sy f T cn l y Ma a s a 4 0 2 C i ci a f o e i o a
R F网 络 的 自适 应 预 测 PD 控 制 器 。 该 控 制 器 利 用 递 推 多 步 预 测 克 服 时 滞 , 采 用基 于 R F 网 络 整 定 B I 并 B
的 PD控 制器在 线调 整 控 制器参 数 , 而克服 了系统 的耦 合 作 用 , 高 了控 制 系统 的输 出跟 踪 精度 。仿 I 从 提
Hale Waihona Puke An da i e p e i tv D o r le as d o BF a ptv r d c i e PI c nt o lr b e n R
ne r l ne wo ks f r m uli v r a l ys e s u a t r o t・ a i b e s t m