外文翻译 改进姿势控制使用便携式脚掌压力为基础的振动触觉生物反馈系统
智能身心反馈训练系统(智能生物反馈仪)—标准版

智能身心反馈训练系统(智能生物反馈仪)标准版HC-SXZ-BZ型随着社会与经济的快速发展,生活质量不断提高,人们在享受丰富物质文明的同时,却常常因工作与学业习的压力、各种突发事件等感到身心疲劳、长期处于紧张与压力状态,引发了如失眠、焦虑、紧张、抑郁、情绪不稳定、注意力不集中等身心不适。
为了有效的解决人们因压力、紧张产生的身心不适,上海惠诚公司基于生物反馈原理、医学、生理学、心理专业训练、结合传感器技术、三维虚拟动画技术、人工智能、自动控制、指纹识别,研发了用于自我身心控制、情绪、压力和紧张度调节的智能身心反馈训练系统。
该系统现已申请国家专利,是惠诚公司整合多年经验,精心研发,在全球尚属首创的划时代、高科技、多学科一体化的新兴心理训练产品。
1、生物反馈理论它基于著名美国心理学家、生物反馈学说的创始人米勒(Miller NE),于1967年提出的内脏学习理论。
相比传统放松训练,生物反馈放松训练则更能及时提供人体心理生理信息的客观参数,因此,可以更为准确地判断训练方法运用是否得当,方向是否正确,从而克服训练中的盲目性。
2、专业心理放松训练应用美国Edmund Jacobson博士创立的雅克布松的渐进性放松训练、德国医学博士舒尔茨创立的自律训练法、呼吸调整训练、意像放松训练及其他放松训练等16种专业的心理放松训练方法。
3、心率变异性(HRV)理论美国心脏数理研究所(The Institute of HeartMath,简称IHM),通过16年的科学试验,发现心率变异性取决于自主神经系统两个分支系统的相互作用。
4、自主神经系统人体呼吸、呼吸均匀度、脉搏、心率变异性、血压等状态的变化,取决于自主神经系统两个分支系统的相互作用,它能直接、动态反映人体情绪与压力状态。
因此通过监测HRV即能实时监测人体情绪与压力的变化状况。
惠诚智能身心反馈训练系统,是上海惠诚公司最新独立研发的一套自我身心控制、情绪调节的专业心理训练综合设备。
balance system sd技术参数

balance system sd技术参数
Balance System SD动静态平衡测试训练系统有6个测试方案和6种训练模式,可以进行直观的“触摸屏”操作,同时拥有静态和动态测试与训练模式是其设计的独特之处。
该设备的技术参数如下:
- 测试评估:通过在不同等级的平衡板上对患者双侧和单侧下肢进行动、静态平衡能力的定量测试,评估神经肌肉控制能力。
平衡系统可以测试身体重心在各个方向的位移及人体的平衡能力。
将测试结果和参考数据对比,并以此为依据制定康复计划。
- 生物反馈及本体感觉训练:作为一个专业的可提高神经肌肉控制能力的设备,它可以提高受伤后人体肌肉运动知觉能力,进而对本体感觉的反射机能进行修复。
Balance System SD动静态平衡测试训练系统的适用范围广泛,包括骨科康复、神经科康复、运动医学康复和老年康复等。
如需了解更多 Balance System SD技术参数的相关信息,可以继续向我提问。
POSTUROMED静态平衡仪(姿势本体感觉训练器)
POSTUROMED静态平衡仪(姿势本体感觉训练器)POSTUROMED是一款利用其不稳定性和可调节性,用以治疗和训练病理性身体姿势改变的设备,尤其是侧重对身体承重关节的功能性不稳定的训练。
RASEV教授于1992年研发了此项主动姿势本体治疗方法。
该设备在不稳定的水平面上确保了良好的治疗效果。
技术参数:POSTUROMED可应用于神经康复,疼痛的治疗,平衡能力及感觉运动的训练,达到以下目的:1.身体承重关节的功能稳定性2.部分的疼痛治疗,尤其是影响到运动系统的慢性背部和姿势性的疼痛3.预防性的协调功能训练运用可调节的不稳定平面,形成连续的活动,动摇病人的躯干,病人可通过激活协调能力使表面趋于稳定。
包括改变身体的重心,通过标准的臀部弯曲动作:稳定骨盆,利用上肢等完成目标性的动作。
系统通过交互式训练与姿势本体感觉的治疗紧密结合在一起,有严格的姿势训练原则。
通过从简单到复杂的七个治疗与阶段,使治疗效果达到最大化。
系统组成:治疗平面,震动元件,释放闸,平衡扶手病人安全性:在训练期间,病人不用害怕,没有滑倒的危险。
自1992至今没有人在训练中发生过意外。
但患有美尼尔综合症和小脑疾患的病人需谨慎。
释放闸:治疗表面的不稳定性可以由释放闸来调节。
治疗表面安装了特殊的震动元件,保证了不同频率范围和一定幅度的运动。
POSTUROMED与姿势本体感觉治疗PPT:新的训练技术:新发展的交互式训练是在中间为弧形的平面上进行包括旋转和掷球的练习。
训练过程中当病人单腿站立时,他的注意力在维持身体的平衡上。
训练中使用正确的姿势和改变身体的重心,被激活的身体与协调性有关的姿势控制机制自动表现出来。
多种不稳定性的治疗表面:在平面上行走时于双腿上改变身体的重量分配,在此过程中病人的协调性被激活,首要的任务是单腿站立和行走时保持身体的稳定性。
重要原则:在每一步中标准的改变身体的重心和单腿站立有助于以适宜的方式激活姿势稳定控制机制。
姿势治疗中的一般要求:1.在使用POSTUROMED之前,任何功能性的影响肌肉平衡性的问题应尽量除去。
压力式反馈治疗仪(STABILIZER Pressure Bio-Feedback)课件

STABILIZER Pressure Bio-Feedback 压力式反馈治疗仪
主要内容
概述 仪器介绍(主要从结构上) 一般操作 具体各个肌群的测试及训练方法 (包括腹横肌 、阔筋膜张肌、下斜方肌、髂 腰肌、臀大肌、及腰椎稳定性训练等)
一、概述
该压力生物反馈仪由理疗医生设计,是一款简单的仪器, 可记录充气压力腔内的压力变化。该仪器可在训练中监控 人体运动,特别是脊柱运动。
运动后,松动螺钉可释放空气。
四、具体各个肌群的测试及训练方法
腰椎和骨盆区的深层肌肉系统直接负责维持脊椎 和骶髂关节的稳定。 更大、更表层的肌肉的腰背痛程度较小,而更深 层肌肉对腰背痛常常过度敏感(感受到较强的腰背 痛)。 为了恢复深层肌肉的功能,需要利用该压力式生 物反馈治疗仪进行特定运动训练和测试.
进行训练2,压力将增加8-10 mmHg,并保持压力恒定。
在骨盆倾斜的位置下进行训练,压力将增加20-50 mmHg,并保持压力 恒定。
又或者
站 立 位
仰卧位
充气达40mmHg
7、臀大肌
把气囊置于腹部下,然后充气达70mmHg (棕色 带); 参照训练1中所述,收缩腹横肌和腹内斜肌; 一侧下肢屈膝90°,然后在保持压力不变的情况下 抬起膝关节离开支撑面5 cm(2英寸); 保持5秒; 重复进行10次。
康复中心仪器设备

康复中心仪器设备1. 概述康复中心仪器设备是用于康复治疗及康复训练的关键工具和设备。
这些设备包括各种器械、机械装置和计算机软件,可用于帮助患者恢复运动功能、改善姿势控制、增强肌肉力量和促进神经再生。
康复中心仪器设备的使用可以提供可调节的训练模式和适应不同程度和类型的损伤的能力,从而为患者提供个性化的治疗方案。
这些设备的使用可以加快康复过程、减少恢复时间,并改善患者的生活质量。
2. 常见的康复中心仪器设备2.1 运动康复仪器运动康复仪器是康复中心的核心仪器之一,用于帮助患者恢复运动功能和改善肌肉控制。
常见的运动康复仪器包括:•动态体平衡仪:用于训练患者的平衡能力和姿势控制,可以调整平衡难度和反馈。
•动力平台:用于帮助患者进行步态和平衡训练,可提供不同的表面和运动模式。
•可调节床:提供可调节的支撑和姿势,可用于改善患者的床上活动能力和姿势控制。
2.2 神经康复仪器神经康复仪器主要用于促进神经再生和恢复患者的神经功能。
以下是常见的神经康复仪器:•神经电刺激仪:通过电刺激促进神经再生和改善神经功能,可用于治疗中风、神经损伤等。
•脑电图(EEG)设备:用于记录脑电活动,帮助医生诊断神经系统疾病,并设计相应的康复计划。
•脑-机接口设备:通过患者的脑电活动控制外部装置,帮助患者重建运动能力和通信能力。
2.3 物理疗法设备物理疗法设备是用于康复治疗中的物理疗法手段的工具,常见的物理疗法设备有:•短波治疗仪:通过短波电磁波的作用,改善血液循环、减轻疼痛和促进组织修复。
•超声波治疗仪:利用超声波的热效应和机械效应,促进组织修复和舒缓疼痛。
•冷热敷设备:用于冷热敷疗法,改善局部血液循环、减轻炎症和缓解肌肉疼痛。
2.4 功能评估和训练设备功能评估和训练设备用于评估和提高患者的运动功能和日常生活能力。
常见的设备包括:•动作分析仪:通过捕捉和分析患者的运动模式,评估和改善患者的动作控制和协调能力。
•日常生活辅助设备:如助行器、轮椅和假肢等,帮助患者独立完成日常生活活动。
触觉钳医疗遥操作机器人论文中英文资料外文翻译文献
中英文资料外文翻译文献触觉钳—机电一体化在医疗器械的应用摘要:本文提出医学钳子系统的触觉、力反馈能力与医疗外科机器人的设计与开发。
双边远程遥控操作系统可以分解成基于加速度控制器的普通模式和差动模式。
在普通模式下获得伺服力,在差动模式下控制位置误差。
考虑到力和位置的一致性,将力的伺服系统和位置调节器整合到了加速器中。
利用扰动观测器实现了基于控制器的加速器。
扰动观测器系统使运动系统成为一个加速度控制系统。
在本文中,通过对4ch模型的分析,定义了双边遥操作系统的两个评价指标:“再现性”和“运作模式”。
触觉钳在大量的重复中实现了宽频带的响应。
实验结果表明了该设计和分析方法的可行性。
1.引言多媒体技术作为一种全新的方式在人类的通信中使用。
人们通过耳朵获得音频或声音信息,通过用眼睛获得图像和视频信息。
信息的人工采集与传输是传统的通信工程的基本技术。
触觉或力的传递需遵守牛顿定律在现实世界的反应。
触觉信息的再现不容许时间延迟。
此外,为了获得生动的感觉,触觉信息应该具有宽带宽。
为了获得触觉信息,同步和互动性是非常重要的。
换句话说,触觉信息是一种双边环境信息。
一种获得,传送和再现触觉信息的系统的实现需要新通讯设备的应用。
近年来,在医学治疗领域强力期待这一反馈系统的实现。
微创手术(MIS)已经关注了这一领域大约10年的时间。
微创手术(MIS)十分重视病人的生活质量(QOL)。
特别是,因为一个内窥镜手术优于旧的手术,它对社会和经济的影响非常大。
医疗遥操作机器人是一种新型的方法涉及到辅助医学医疗程序,在偏远地区使用遥控机器人诊断,这一方法在医疗行业获得了重大利益。
例如,1998年Intuitive Surgica发布了名为“达芬奇”的一个机器人手术器械。
达芬奇是用于临床试验;但是并没有触觉反馈。
操作者只能通过视觉反馈获得相关信息。
目前这种缺少触觉反馈的主人-奴隶式的机械手潜在许多风险。
在各个领域的手术中触觉是非常重要的。
改进姿势控制使用便携式脚掌压力为基础的振动触觉生物反馈系统

改进姿势控制使用便携式脚掌压力为基础的振动触觉生物反馈系统Christina Z.Ma,Anson H.P.Wan, Duo W.C.Wong,Yong-Ping.Zheng,IEEE Senior Member,andWinson C.C.Lee摘要这里引入了一种便携和轻质的振动触觉生物反馈系统,其作为实时平衡辅助。
生物反馈系统为用户提供了基于足底压力分布变化的振动触觉刺激。
进行实验以研究其改善姿势控制的有效性。
进行Romberg试验,要求受试者尽可能静止,同时通过力平台测量身体摇摆程度。
两个年轻健康受试者和一个更老的健康受试者参与研究。
使用穿着羊毛袜和闭眼干预来模拟减少的感觉输入,并研究提供振动触觉反馈的效果。
实验在3个条件下进行:1)裸脚,眼睛打开(基线),2)穿着5层羊毛袜,闭上眼睛,3)穿5层袜子,闭上眼睛,用生物反馈系统打开。
研究了压力中心(COP)的范围,均方根(RMS)和方差系数(CV)。
结果表明在干预减少感觉输入后姿势摇摆的显着增加,并且在使用振动触觉反馈提醒四个方向的身体运动时,姿势摇摆的显着减少。
这些结果表明,振动触觉生物反馈系统有效改善受试者的姿势控制。
需要关于这种生物反馈系统对动态平衡控制和步态的影响的未来研究。
1 介绍年人跌倒和跌倒造成的伤害已成为世界各地的主要公共卫生问题[1]。
居住在社区中的65岁或以上的人群中约30%的人和居住在护理机构或养老院中的人群的50%以上每年都有衰退[1,2]。
证据显示伤害是老年人口中第五大死亡原因,这些伤害大多与跌倒有关[2,3]。
跌倒的后果的负担沉重。
经历跌倒的人中约20%需要医疗,5%导致骨折,5%至10%导致其他严重的伤害,例如严重的头部损伤,关节扭曲和脱位,软组织擦伤,挫伤和撕裂[2 ,4]。
对于那些患有髋骨骨折的长者,14%至36%将在受伤后1年内死亡,并且存活的那些将对独立性和生活质量具有深刻的临时性,甚至永久性损伤[5]。
面向步行康复训练的质量虚拟去除主动人体重力支撑系统

面向步行康复训练的质量虚拟去除主动人体重力支撑系统乔兵;马欧【摘要】研究了一种能够有效降低病人行走动态载荷的质量虚拟去除主动人体重力支撑(Body weight support,BWS)系统.该主动BWS系统能够根据人体的加速度反馈实时调节悬挂绳索中的张力,以达到同时平衡作用在病人身体上的重力和惯性力.为了验证该主动BWS的技术可行性,设计了一个简化的实验装置,利用偏心轮带动滑块作上下运动来模拟人体在垂直方向的步态,悬挂滑块的绳索中的张力根据滑块的加速度反馈进行调节,滑块与偏心轮之间的接触力代表动态行走载荷.实验结果表明,质量虚拟去除主动BWS系统能够有效降低病人在步行康复跑步机上行走的重力载荷和惯性载荷,从而使病人在跑步机上进行训练时获得好像失去了部分身体质量的动力学感受.%An active body-weight support (BWS) system is investigated with virtual mass offloading capability to reduce the walking burden on patienti. The main idea of the BWS technology uses an active control winch to regulate the tension on the suspension cable based on the acceleration feedback to the offload both the weight and the inertia force acting on the patient body. A patient supported in such an active BWS system can walk on the treadmill with an ease dynamic load as ifhe/she loses partial mass of his/her body. To verify its engineering feasibility, a simplified testbed based on a cable pulley suspended cam-slider system is designed. And it can generate a periodical motion pattern similar to a human gait.A load cell is installed on the interconnect slider and the cable. The cable is driven by a controlled winch based on the acceleration feedback of the slider. The contact force between the sliderand the cam is measured to evaluate the walking load of the slider. Experimental results demonstrate that the virtual mass offloading active BWS system can simultaneously reduce both gravitational and inertial loads of the walking body, thus it implies that the walking body suspended in the BWS system loses dynamics as if the certain amount of the body mass is removed.【期刊名称】《南京航空航天大学学报》【年(卷),期】2011(043)001【总页数】7页(P120-126)【关键词】人体重力支撑;主动BWS;被动BWS;步行康复训练;跑步机【作者】乔兵;马欧【作者单位】南京航空航天大学航天学院,南京,210016;新墨西哥州立大学机械与宇航工程系,美国,NM,88003【正文语种】中文【中图分类】TP242.3根据统计,由于受外伤、中风、大脑损伤、脊髓疾病或其他健康问题的困扰,全世界大约有两千六百多万人患有下肢运动能力方面的残疾[1]。
翔宇智能下肢反馈康复训练系统操作规程

翔宇智能下肢反馈康复训练系统操作规程智能下肢反馈康复训练系统是一款主要用来对下肢功能障碍患者进行模拟步行训练的仪器,具有主被动两种训练模式,被动训练用于早中期的训练或肌力分级在2级以下的患者,当患者的肌力提高到2级以上的时候,可以进行主动训练,主要目的是刺激患者下肢的神经肌肉,促进其功能的恢复,帮助其建立正常的步态模式,最终实现患者下地进行行走。
该仪器同时具有跟踪评估模式、痉挛检测模式等,功能齐全,使用过程中安全性高。
产品原理
1)刺激下肢神经肌肉,增强下肢肌肉力量,防止肌肉的萎缩;
2)改善下肢血液循环,加强血供,改善下肢的营养供给。
产品特点
本产品由微电脑自动控制;被动训练;
起立踏步训练系统为直立床与下肢关节康复训练的完善结合,对膝关节、踝关节做被动训练。
适用于长期卧床不起的病人。
采用进口优质控制器和驱动器,仪器平稳无噪音。
可移动式床体,操作台数码显示轻触薄膜开关控制,操作方便,使用寿命更长。
起立角度可点动控制操作,简便、方便患者转移。
踏步时间和踏步速度由微电脑控制。
配备紧急停止开关,设备安全可靠。
脚踏板电动伸缩装置,可根据患者身高,做灵活调节,并可对患
者下肢施加压力。
预防骨质疏松。
脚踏板上下自由活动,适用于踝关节恢复训练。
豪华脚轮,移动灵活,锁定牢固。
有减重功能,不可电动调节。
一种康复理疗仪的改进

一种康复理疗仪的改进周思妍;辛勤;安春晓;刘伟;初旭【摘要】In recent years, the number of patients with hemiplegia or difficulty in moving caused by cerebral apoplexy has been increasing, and the huge cost of long-term rehabilitation cannot be afforded by most families.The current therapy method with rehabilitation process makes many patients suffer unspeakably.In order to make patients get well soon and lighten the financial burden on households, the compound rehabilitation equipment has been studied, hoping to keep patients′ symptom free by a comprehensive physiotherapy instrument used to rehabilitation.%近年来,随着脑卒中等疾病导致偏瘫或行动不便的患者越来越多,长期的康复治疗耗费巨大,多数家庭难以维持.现行的治疗方式康复进程缓慢,不能全面及时治疗,让许多患者及家属苦不堪言.为了使病人早日康复,减轻经济负担,改进和研究了一项复合型康复器械,希望通过全方位改进康复理疗仪,解决患者的问题.【期刊名称】《黑龙江科学》【年(卷),期】2017(008)004【总页数】2页(P52-53)【关键词】理疗仪;改进;康复【作者】周思妍;辛勤;安春晓;刘伟;初旭【作者单位】佳木斯大学,黑龙江佳木斯 154007;佳木斯大学,黑龙江佳木斯154007;佳木斯大学,黑龙江佳木斯 154007;佳木斯大学,黑龙江佳木斯 154007;佳木斯大学,黑龙江佳木斯 154007【正文语种】中文【中图分类】R473在科学技术空前发展和经济水平不断提高的21世纪,由于人类不良生活习惯、饮食习惯和巨大生活压力所致,患脑卒中的人数不断增加,环境的污染、农药化肥的使用及电子产品的普遍应用,也使脑瘫的发病率日益升高。
利用生物反馈技术提高女足运动员自我调控能力的研究
利用生物反馈技术提高女足运动员自我调控能力的研究
刘书强
【期刊名称】《体育科研》
【年(卷),期】2018(039)003
【摘要】对上海青年女子足球运动员个性及竞赛焦虑情况进行测试,并对测试中发现的个性特质忧虑性和紧张性较高以及特质焦虑水平较高的运动员使用生物反馈仪进行放松训练.结果表明,生物反馈训练中,音乐放松和指导语加音乐放松训练可以有效地提高运动员的皮肤温度,降低皮肤导电性,改善脑电α波、θ波和SMR波,且指导语加音乐放松的训练方式更加有效.结论:利用生物反馈训练仪可以调节女足运动员自主神经及大脑皮质功能,特别是指导语加音乐放松能良好地调节运动员心理状态及情绪状态.
【总页数】6页(P81-85,91)
【作者】刘书强
【作者单位】上海体育科学研究所,上海200030
【正文语种】中文
【中图分类】G804.8
【相关文献】
1.生物反馈训练对提高江苏男子重剑运动员心理调节能力的研究 [J], 沈鹤军;张忠;庞进
2.利用高原训练提高运动员Hbmass的时间特征研究 [J], 王政
3.青少年速滑运动员利用新型滑板提高专项训练负荷能力的实验研究 [J], 于睿
4.利用高原训练基地优势提高田径耐力项目运动员成绩的研究 [J], 任保国;盖维池
5.利用spiro Tiger呼吸机提高中长跑运动员损伤后康复期呼吸能力的研究 [J], 门伟;曹文渊;
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
改进姿势控制使用便携式脚掌压力为基础的振动触觉生物反馈系统Christina Z.Ma,Anson H.P.Wan, Duo W.C.Wong,Yong-Ping.Zheng,IEEE Senior Member,andWinson C.C.Lee摘要这里引入了一种便携和轻质的振动触觉生物反馈系统,其作为实时平衡辅助。
生物反馈系统为用户提供了基于足底压力分布变化的振动触觉刺激。
进行实验以研究其改善姿势控制的有效性。
进行Romberg试验,要求受试者尽可能静止,同时通过力平台测量身体摇摆程度。
两个年轻健康受试者和一个更老的健康受试者参与研究。
使用穿着羊毛袜和闭眼干预来模拟减少的感觉输入,并研究提供振动触觉反馈的效果。
实验在3个条件下进行:1)裸脚,眼睛打开(基线),2)穿着5层羊毛袜,闭上眼睛,3)穿5层袜子,闭上眼睛,用生物反馈系统打开。
研究了压力中心(COP)的范围,均方根(RMS)和方差系数(CV)。
结果表明在干预减少感觉输入后姿势摇摆的显着增加,并且在使用振动触觉反馈提醒四个方向的身体运动时,姿势摇摆的显着减少。
这些结果表明,振动触觉生物反馈系统有效改善受试者的姿势控制。
需要关于这种生物反馈系统对动态平衡控制和步态的影响的未来研究。
1 介绍年人跌倒和跌倒造成的伤害已成为世界各地的主要公共卫生问题[1]。
居住在社区中的65岁或以上的人群中约30%的人和居住在护理机构或养老院中的人群的50%以上每年都有衰退[1,2]。
证据显示伤害是老年人口中第五大死亡原因,这些伤害大多与跌倒有关[2,3]。
跌倒的后果的负担沉重。
经历跌倒的人中约20%需要医疗,5%导致骨折,5%至10%导致其他严重的伤害,例如严重的头部损伤,关节扭曲和脱位,软组织擦伤,挫伤和撕裂[2 ,4]。
对于那些患有髋骨骨折的长者,14%至36%将在受伤后1年内死亡,并且存活的那些将对独立性和生活质量具有深刻的临时性,甚至永久性损伤[5]。
跌倒致伤的医疗费用是巨大的。
到2020年,老年人的总体成本下降预计在美国为430亿美元[6]。
除了身体伤害,跌倒的历史可能引起恐惧跌倒,自我强加的活动水平下降,对他人的功能依赖,社会隔离,抑郁症和生活质量下降[7]。
已经广泛研究了跌倒的风险因素。
研究表明,其中最重要的危险因素是平衡和步态障碍,肌无力,视力缺陷,以前跌倒的历史,辅助装置的使用,关节炎,日常生活受损的活动,抑郁,认知损伤,多发病,多药学和老年人[8]。
平衡障碍随着衰老而增加,并且似乎是跌倒的独立危险因素[8]。
证据表明,平衡失调是跌倒的第二个主要原因,只是偶然发生[9]。
老年人通常具有皮肤跖面表面敏感性,视觉功能和本体感觉的下降[10,11],这可能导致平衡障碍。
有许多研究支持皮肤感觉从足底表面和视觉输入,在平衡控制中的重要贡献[10-13]。
由于缺乏平衡是摔倒的主要原因之一,一些生物反馈系统提供身体运动的附加线索演变以改善平衡,以防止跌倒[14-20]。
这些装置的基本原理是通过增强体感输入来改善平衡。
提供不同类型的感觉增强以补充天然感觉输入,包括振动触觉[16,20],电触觉[15,19],视觉[18]和听觉[17]。
其中,振动触觉感觉增强被证明是最优惠的,因为该系统不干扰说话,进食,观看和听力的任务[16,20]。
然而,文献中提出的大多数振动触觉生物反馈系统包括处理模拟和数字信号的计算机,以及安装在受试者背部的大体积倾斜模块[16,20-25]。
这种设计是麻烦的,并且限制了其在实验室或康复社区中的应用。
在本文中,我们介绍一种新的便携和轻量级的振动触觉生物反馈系统,可以作为一个实时的平衡帮助,提醒用户基于测量的足底压力的身体摇摆的程度。
本文还介绍了关于使用这种新的生物反馈系统的初步积极发现。
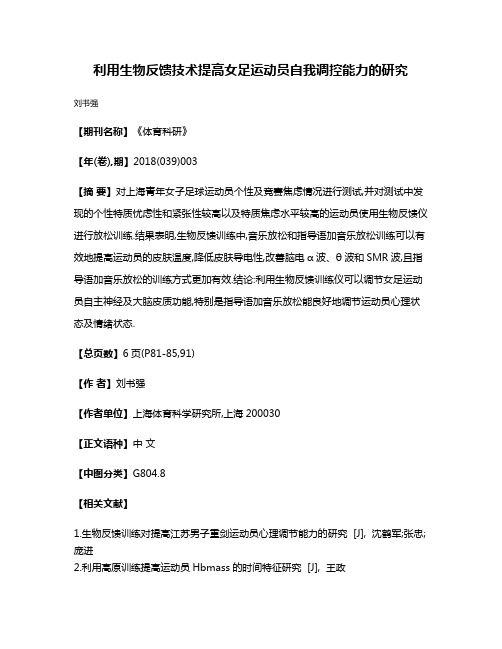
2 方法A 生物反馈系统振动触觉生物反馈系统由连接有六个力传感器,微控制器单元,无线发射器和接收器系统,四个振动器和两个电池的平坦鞋垫(图1和图2)组成。
整个生物反馈系统重量小于100克。
微控制器(长度11cm,宽度2cm,高度2.5cm)处理足底力数据,并通过蓝牙通信向振动器提供适当的振动信号。
三个力传感器(厚度为0.2mm,长度为25.4mm,宽度为14mm,感测区域直径为9.5mm,力范围为0-445N)附接到每一侧,测量第一和第五跖骨头部以及跟部处的力。
在第一跖骨头以及脚跟上检测到的力在左侧和右侧被平均,其分别用于指示向前和向后的姿势摆动。
在左和右第五跖骨头测量的力量用于指示左和右姿势摇摆。
提供振动刺激的四个振动器附接到前躯干的前,后,左和右侧(图3)。
振动的产生基于由传感器检测的足底压力。
一旦由传感器检测到的力超过阈值就引发完全幅度的振动,这在过程部分中进一步描述。
产生振动以提醒受试者他们的身体摇摆。
图1 振动触觉生物反馈系统的流程图B 试点测试主题在本研究中招募了两个健康的年轻成年人(年龄25±2.8岁,身高169±5.7cm,体重73±15.6kg)和一个健康的老年人(年龄78岁,身高161.5cm,体重59kg)。
受试者是完全独立的,并且生活在基于社区的环境中,他们都没有被诊断出任何神经病学或前庭病症,糖尿病,严重的心血管或肺部疾病。
该实验已获香港理工大学人类受试者伦理小组委员会批准,并获得所有受试者的书面知情同意书。
图2 振动触觉生物反馈系统的组件,包括平板鞋垫,力传感器,振动器,微控制器单元,无线发射器和接收机系统。
图3 安装在受试者的上躯干上的振动触觉生物反馈系统。
流程在实验之前,指导所有受试者如何使用生物反馈系统来提供关于其静态平衡状态的附加信息。
他们被告知每个振动器对应于在一个特定方向即向前,向后,向左和向右的身体运动。
指示受试者向前,向后和侧向移动以经历四个不同方向的振动,以确保受试者能够使用振动信号作为平衡辅助。
受试者被给予10分钟以熟悉新的生物反馈系统。
在练习期结束时,要求受试者在生物反馈系统打开90秒的情况下进行静置,进行3次重复试验。
阈值定义为在3个试验中在每个力传感器处记录的平均力乘以110%。
生物反馈系统通过通过振动器施加振动来工作,只要相应的力传感器测量到超过计算的阈值的力。
在实验期间,使用Romberg测试来测量平衡对照(图4)。
指示受试者静静地站立,双臂交叉放置在力平台上的相对肩上。
要求受试者尽可能静止,在所有这三个实验条件下,他们的头部直立:1)裸脚和眼睛打开(基线),2)用羊毛袜,闭眼和生物反馈系统关闭,3)与羊毛袜,眼睛闭合和生物反馈系统开启。
穿着的羊毛袜和眼睛闭合的干预被用于模拟减少的感觉输入。
当进行Romberg试验时,受试者被指示每次试验放置90秒。
图4.罗姆伯格测试:受试者胳膊平静地站着基于对面的肩膀每个条件重复3次,因此9次试验。
在每个条件之间受试者休息10分钟以消除可能疲劳的影响。
测试三种不同的条件随机化。
在每个条件下,测试试验连续。
测量使用力平台(OR6,Advanced Mechanical Technology,Inc.PA,USA)测量COP信号的位移,指示姿势稳定性。
COP被定义为地面反应矢量的点[26]。
记录来自一个力平台的COP网并用于计算基于COP的测量值。
在双足静态支持,在AP或ML方向上的COP净如在等式(1)中计算:COP net =COP l ×R vl /(R vl +R vr )+COP r ×R vr /(R vl +R vr ) (1)其中COP I和COP r是左右脚下的COP分别。
R vl和R vr是下面的垂直反作用力左脚和右脚[26]。
在平衡测试之前,使用5.07 / 10-g单丝(5级,WESTTM Nerve Tester,Connecticut Bio-instruments Inc.NY,USA)评估在穿着羊毛袜干预之前和之后的脚的种植体接触压力。
单丝的得分越高,受试者在足底表面上具有较低的感觉。
记录在大脚趾,第一跖骨头,第五跖骨头和脚跟处的单丝评分。
使用视觉模拟量表(VAS,10cm)问卷来评估受试者在不同类型的干预后其平衡状态的主观感觉。
要求每个受试者阅读用于视觉模拟量表的标准化说明书。
VAS由描述符锚定,最容易保持平衡在0和'最难以保持平衡'在10,分别。
受试者在完成一个特定条件后需要填写问卷一次。
数据分析从AP和ML方向的每个试验的COP位移计算几种COP测量值:(1)COP位移(mm)的范围表示COP的最大偏差。
(2)COP均方根(RMS)振幅,以及(3)变异系数(CV)。
计算COP的范围,RMS和CV计算前后(AP)和中间(ML)方向的平均值,并计算AP和ML方向之间的这些值的平均值。
3 结果穿着羊毛袜之前和之后的单丝得分的结果示于表I中。
在穿着羊毛袜之后,可以观察到单丝得分的增加所有三个受试者,这表明降低的脚底感觉。
问卷显示,穿着羊毛袜后VAS不稳定性分数从0.25增加到2.65,在两个年轻科目中开启生物反馈系统后降至1.55。
这表明当穿着羊毛袜时,年轻的对象感到更难保持平衡,并且感觉更容易与生物反馈系统的应用保持平衡。
老年受试者在所有3个条件下得分为0,表明受试者认为在所有三种条件下保持平衡非常容易。
在所有三种条件下的COP轨迹的典型示例如图3所示。
当比较穿着羊毛袜前后COP 偏移的面积时,如图5所示。
如图5A和5B所示,眼睛闭合和袜子干预明显增加了姿势摇摆的偏移。
并且使用生物反馈后COP的偏移面积减少,如图1所示。
5C。
相当稳定期间的COP位移的数值结果总结在表III中。
眼睛闭合和穿羊毛袜后,所有三个受试者的RMS,CV和范围增加。
对于年轻受试者,振动触觉生物反馈系统将闭眼和袜子的RMS,CV和COP范围分别降低了17.17%,17.99%和13.94%。
对于老年人,生物反馈系统将RMS和CV分别降低了12.55%和8.16%,并将范围略微增加了2.03%。
表I.前/后磨损羊毛口的单丝纤维评分的结果4 讨论在本实验中,我们调查了振动触觉生物反馈系统在改善姿势控制的有效性。
该系统的基本原理是通过其上部干线的振动触觉刺激,向用户提供基于足底压力分布的他/她的身体运动的附加信息。
测量COP偏移的参数,包括RMS,CV和范围,通常用于评估姿势稳定性[27]。
基于COP的措施的增加通常被描述为姿势稳定性的总体恶化[28]。
使用具有眼睛闭合和袜子的生物反馈系统后的RMS的CV,CV的降低表明受试者能够利用这种振动触觉生物反馈系统来改善在站立期间的姿势控制,当他们的感觉输入减少时。
关于生物反馈系统的应用,我们的研究证实了以前的研究报告了不同种类的生物反馈的可用性,包括振动触觉[16,20],电触觉[15,19],视觉[18]和听觉[17]姿势控制。