关于Step7与KUKA库卡机器人外部自动启动配置总结
关于Step7与KUKA库卡机器人外部自动启动配置总结

初始化 检查是否在原点
机器人回原点轨迹
等待PLC程序启动信号
调用1号程序
调用2号程序
调用3号程序
27th August 2014
17
六、PLC程序-机器人控制功能块配置
关键词: • Step7 • PLC • KUKA • KRC4 • Profinet • Profisafe • 机器人 • 试教器 • 输入 • 输出
27th August 2014
3
3
目录
1 接口信号定义说明 2 机器人外部运行控制接口配置 3 机器人外部自动启动IO信号配置 4 机器人外部自动启动时序 5 机器人程序配置 6 PLC程序-机器人控制功能块配置
27th August 2014
24
六、PLC程序-机器人控制功能块配置
机器人自动启动使能条件 机器人报警和线体报警反馈
机器人急停安全回路控制
机器人区域安全 安全回路控制
27th August 2014
25
六、PLC程序-机器人控制功能块配置
通过PLC外部自动启动机器人,上述控制能块介绍的引脚信号都是机器人控制和外部启动的必要条 件,缺一不可,至于输出,这里不做介绍,主要是给PLC内部逻辑编写和状态显示使用。 除了上述PLC对机器人控制块的配置信号外,机器人外部自动启动信号交换还需要其它前提条件
下面讲述如何配置“#Robot-KUKA”标准功能块来进行外部自动启动机器人控制。
27th August 2014
18
六、PLC程序-机器人控制功能块配置
KUKA外部轴配置方法,偷偷分享的
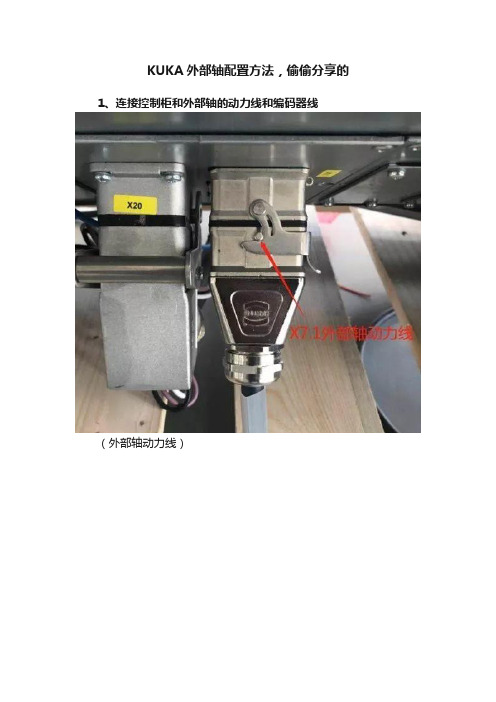
KUKA外部轴配置方法,偷偷分享的1、连接控制柜和外部轴的动力线和编码器线
(外部轴动力线)
(连接机器人底部RDC编码器线)
2、Workvisual外部轴添加与配置
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
(4)在单元配置中将添加的外部轴电机与控制柜连接:(拖住电机连接控制柜)
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
(外部轴电机连接错误,导入项目提示报警编码器故障):
(6)右键电机--机器参数配置(配置电机需要的参数):
(7)配置完成后,项目编译导入机器人控制柜。
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)外部轴零点丢失(进行零点校正):
(10)外部轴动作方式的切换:。
FANUC 机器人由PLC控制外部自动启动,暂停。

本文介绍了FANUC机器人由PLC外部控制自动启动,暂停,再启动的工作流程。
包含PLC程序和机器人的设定工作流程1.UI1 和UI2一直为ON后 ,延时0.5S UI3一直为ON2,延时0.5s后,UI8一直为ON3.延时0.5S后。
UI5位ON,过0.5s后 OFF如果机器人不在暂停状态 第一次启动 UI9 和UI17 ON UI18为ON-OFF4.延时0.5后。
如果机器人不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON5.延时0.5后 如果机器人不在暂停状态==UO4 不为ON, 则UI17为ON6.UI17 ON了以后,如果机器人不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF如果机器人在暂停状态 启动后又暂停了 UI9 U17 UI18 不需要再次启动7 延时0.5后 。
如果机器人在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFFUI1和UI2UI3和UI8UI5和UI9-16机器人示教器设定机器人启动方式有2种,其实没什么区别,其实根据情况选择,8个机器人输入信号==RSR1-8或PNS1-8 设定流程如下1.参考资料选择哪一种启动方式2.正常状态如下3.系统设定第一步======1.专用外部信号==启动2.所选程序的调用PNS===启动远程/本地设定===远程5.系统设定第3步6. 2种方式其一PNS==========================================RSR=====================================机器人点位介绍机器人正常启动后的状态如下 可以参考。
KUKA机器人操作

KUKA机器人操作嘿,朋友!今天咱们来聊聊 KUKA 机器人操作这档子事儿。
我先跟您唠唠我之前遇到的一件有趣的事儿。
有一回,我带着一群学生去参观一家工厂,那儿就有 KUKA 机器人在忙活着。
其中一个学生特别好奇,一个劲儿地往前凑,结果不小心碰到了一个按钮,那机器人突然就停下了动作,把大家都吓了一跳!还好有技术人员及时赶来,重新设置才让它继续工作。
从那以后,这个学生再也不敢随便乱动啦。
咱们言归正传,先来说说 KUKA 机器人操作的基础知识。
操作KUKA 机器人,您得先了解它的基本构造。
这就好比您要开一辆车,得先知道方向盘、刹车在哪儿是一个道理。
KUKA 机器人通常由机械本体、控制系统、驱动系统和传感器等部分组成。
机械本体就是它的“身体”,控制系统就像是它的“大脑”,驱动系统是“动力源泉”,传感器则是它的“眼睛”和“耳朵”。
要想让 KUKA 机器人乖乖听话,您得学会编程。
编程可不像咱们平时写作文那么简单,它需要您用特定的编程语言和指令来告诉机器人要做什么。
比如说,您想让它从 A 点移动到 B 点,您就得准确地告诉它移动的速度、路径还有停留的时间。
这要是弄错了一点点,那它可就不知道跑哪儿去啦!再说说操作界面。
KUKA 机器人的操作界面就像是一个神秘的控制面板,上面有各种各样的按钮、图标和参数设置。
一开始看着可能会觉得眼花缭乱,但是别担心,只要您多熟悉熟悉,就会发现其实也没那么复杂。
就像我刚开始接触的时候,也是一头雾水,但是经过一段时间的摸索,慢慢就上手了。
操作 KUKA 机器人的时候,安全可是重中之重!您可千万别小瞧这一点。
每次操作之前,都得检查一下周围环境,确保没有障碍物,也没有人员在危险区域。
记得有一次,我在操作的时候,旁边有个工具没放好,差点就被机器人碰到了,那可真是惊险万分!所以啊,一定要小心再小心。
还有啊,KUKA 机器人的维护也不能马虎。
就像咱们人需要定期体检一样,机器人也需要定期检查、保养。
KUKA外部自动配置
• PGNO_FBIT_REFL 程序镜像第一位;为 正常使用该选项,变量 “REFLECT_PROG_NR”必须指定为“1”;
• ALARM_STOP _I 内部紧急关断;在内部 急停情况下复位该输出,正常为1,急停为0。
输出接口2及说明
• PRO_ACT 程序激活;如 果机器人在执行程序,则该 输出为真;
• PGNO_REQ 程序号请求; 请求PLC发送程序号;
• APPL_RUN 程序运行; 通过设定这个输出,设置机 器人控制器与PLC通讯,确定 程序正被执行的细节。
输出接口3及ห้องสมุดไป่ตู้明
• IN_HOME 在HOME位置;该输出与 PLC通讯,把机器人在HOME位置信号反 馈给PLC;
可以互相讨论下,但要小声点
机器人启动时序
1、T1模式下选择CELL程序,手动执行程序,注意中间路径,有时机器人不在HOME点附近,回原点的过 程中需慢速运行,直至到达BCO。
2、松开执行键,重新按下,信息栏出现“运行方式错误”提示,点击信息栏上的“全部OK”确认消息,松开 驱动及运行键,把机器人的运行模式打到“外部自动”即可。
操作步骤: 1、权限切换到“专家”用户组; 2、打开 程序CELL.SRC; 3. 在“CASE”段中将名称“EXAMPLE” 用相应的子程序名称进行替换 ,删除名称前 的分号; 4、关闭程序并保存更改; 5、若修改存在错误,则在保存后CELL程序 上会出现一个“×”标识,点击CELL,显 示出错误位置,对错误进行修改。
输出接口1及说明
• PERI_RDY 驱动装置就绪;通过设定这个 输出,设置机器人控制器与PLC通讯驱动器接 通的细节;
关于Step7与KUKA库卡机器人外部自动启动配置总结精编版

27th August 2014
15 15
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
4. 传递程序号并处理应用程序
27th August 2014
16 16
99
三、机器人外部自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
PLC >> KRC4
KRC4 >> PLC
265 27th August自动启动IO信号配置
了解了机器人与PLC外部自动运行控制的IO信号后,我们需要在机器人试教上面对PLC与机器人交 互IO进行点号对应配置,具体如下:
机
器
人
外
部
自
动
启
动
时
序
表
27th August 2014
12 12
四、机器人外部自动启动时序
对机器人的外部自动启动每一项分步任务均须满足相关条件,并且必须能够将机器人状态报告给 PLC,使用规定的信号交换才能保证机器人正常启动:
1. 接通驱动装置
27th August 2014
13 13
四、机器人外部自动启动时序
编写机器人运行过程中暂停条件 提供机器人在HMI翻页后的偏移地址
27th August 2014
填写PLC发给机器人的程序号(外部启动必须信号) 机器人反馈给PLC的实际运行程序号(外部启动必须信号) PLC给机器人发外部自动程序启动命令(外部启动必须信号)
FANUC机器人由PLC控制外部自动启动,暂停。

FANUC机器⼈由PLC控制外部⾃动启动,暂停。
本⽂介绍了FANUC机器⼈由PLC外部控制⾃动启动,暂停,再启动的⼯作流程。
包含PLC程序和机器⼈的设定⼯作流程1.UI1 和UI2⼀直为ON后,延时0.5S UI3⼀直为ON2,延时0.5s后,UI8⼀直为ON3.延时0.5S后。
UI5位ON,过0.5s后 OFF如果机器⼈不在暂停状态第⼀次启动 UI9 和UI17 ON UI18为ON-OFF4.延时0.5后。
如果机器⼈不在暂停状态==UO4 不为ON, 则UI9-16选择程序号ON5.延时0.5后如果机器⼈不在暂停状态==UO4 不为ON, 则UI17为ON6.UI17 ON了以后,如果机器⼈不在暂停状态==UO4 不为ON,则UI18为ON 过0.5S后OFF如果机器⼈在暂停状态启动后⼜暂停了 UI9 U17 UI18 不需要再次启动7 延时0.5后。
如果机器⼈在暂停状态==UO4 为ON, 则UI6为ON.过2S后为OFFUI1和UI2UI3和UI8UI5和UI9-16机器⼈⽰教器设定机器⼈启动⽅式有2种,其实没什么区别,其实根据情况选择,8个机器⼈输⼊信号==RSR1-8或PNS1-8 设定流程如下1.参考资料选择哪⼀种启动⽅式2.正常状态如下3.系统设定第⼀步======1.专⽤外部信号==启动2.所选程序的调⽤PNS===启动远程/本地设定===远程5.系统设定第3步6. 2种⽅式其⼀PNS==========================================RSR=====================================机器⼈点位介绍机器⼈正常启动后的状态如下可以参考。
KUKA机器人使用经验总结讲解学习

KUKA机器人使用经验总结讲解学习1.机器人如何在一个平面内运动解决办法:设置工具坐标、基座标,然后在调用PTP、LIN、CIRC指令时设置所用坐标为基座标即可2.如何让机器人走相对位置解决方式:通过查资料及试验发现,展开所用命令LIN P1,所走的P1点的坐标存在XP1中,XP1是E6POS类型,可直接对XP1.X,XP1.Y,XP1.Z,XP1.A,XP1.B,XP1.C这六个坐标参数赋值,赋完值后,再执行LIN XP1,机器人就会走到赋值的坐标点,如此便可进行相对赋值,如P2点需要在P1点X轴方向再前进200mm,则可设为XP2.X=XP1.X+200;将当前机器人坐标值赋给指定的P3点方法为XP3=$POS_ACT3.如何与机器人建立通讯解决方法:当机器人为客户端时,写一个外部电脑的服务器程序,设置外部电脑IP,开启服务器监听程序,机器人端按照所给示例设置对应的XML配置文件,写相应的运行代码,解析通讯数据并做相应的回应,然后运行,通讯时外部电脑关掉防火墙,否则通讯不上。
机器人做服务器也是同理,区别只在于:机器人方面,XML配置文件中要改一下设置,外部电脑要改成客户端程序。
4.机器人外部IO如何使用解决方法:机器人外部IO由机器人自身供电,接线方式如下:判断机器人的指定输入端1是否有信号指令为WAIT FOR $IN[01],当端口1有信号,程序将会往下进行,否则一直等待。
设置输出端6的指令为$OUT[06]=TRUE,有几个输出信号为固定的安全类信号,不能设置,如OUT[01]默认为控制器就绪,OUT[02]默认为紧急关断闭合,OUT[08]默认为内部紧急关断等。
输入输出信号可在示教器的显示→输入/输出端→数字输入/输出端界面实时查看;5.如何通过外部传坐标点运行机器人解决方法:在机器人程序的XML通讯配置文档中的接收项里增加FRAME参数和S、T 两个参数(FRAME参数是保存机器人XYZABC 坐标值,两个int型参数保存S、T的值,FRAME 参数决定机器人的目标点位,S、T决定机器人的路径),然后在机器人程序中写读取指令,当机器人与外部电脑通讯时,收到这几个参数,再将参数值赋值给目标点位即可。
KUKA机器人启动时序
KUKA启动时序
KUKA启动时序:
1、硬件准备
1、确保电源开关处于关闭状态。
2、确保控制器电源开关处于关闭状态。
3、检查周围的工作环境,确保无障碍物存在。
4、确保的各个关节和执行器处于正常工作状态。
5、检查的传感器和安全装置,确保正常运行。
2、软件准备
1、将控制器连接到计算机上。
2、打开控制器所需的软件工具。
3、检查控制器的固件版本,并及时更新到最新版本。
4、配置的网络连接,确保与其他设备的通信正常。
3、启动控制器
1、将控制器电源开关打开。
2、等待控制器完成启动过程。
3、检查控制器的状态指示灯,确保处于正常工作状态。
4、配置参数
1、进入控制器的参数设置界面。
2、配置的系统参数,如速度、加速度、精度等。
3、配置的安全参数,如安全区域、碰撞检测等。
4、配置的通信参数,如网络地质、通信协议等。
5、运行
1、将电源开关打开。
2、等待完成初始化过程。
3、选择合适的控制模式,并切换到相应的工作模式。
4、通过遥控器或计算机界面控制进行运动。
6、操作注意事项和维护
1、遵守的操作手册和相关安全规范。
2、定期检查各个部件的工作状态,如电机、传感器、执行器等。
3、及时清洁,防止灰尘和杂质影响其工作效果。
4、定期进行的维护保养,如更换润滑油、清理滑轨等。
附件:
本文档无附件。
法律名词及注释:无。
KUKA机器人外部自动配置

库卡机器人外部自动配置外部自动配置:系统结构外部自动配置,通过PLC调用机器人程序及启动停止。
∙系统结构原理为了在KR C4 和PLC之间能够顺利进行通讯,必须满足以下几点:∙外部自动运行方式:在该运行方式下由一台主机或者PLC控制机器人系统∙CELL.SRC:从外部选择机器人程序的控制程序。
∙PLC 和机器人之间的信号交换:用于配置输入和输出端信号的外部自动运行接口:∙发送至机器人的控制信号(输入端):开始和停止信号、程序编号、故障确认∙机器人状态(输出端):驱动装置状态、位置、故障等等。
从外部启动程序的安全须知∙选择了CELL 程序后必须执行BCO 运行。
∙Cell.src 控制程序管理由PLC 传输的程序号时,需要使用控制程序Cell.src。
该程序始终位于文件夹“R1” 中。
与任何常见的程序一样,Cell 程序也可以进行个性化调整,但程序的基本结构必须保持不变。
Cell程序的结构和功能:1、初始化和Home 位置∙初始化基坐标参数∙根据“Home” 位置检查机器人位置∙初始化外部自动运行接口2、无限循环:∙通过模块“P00” 询问程序号∙进入已经确定程序号的选择循环。
3 、程序号的选择循环∙根据程序号(保存在变量“PGNO” 中)跳转至相应的分支(“CASE”) 中。
∙记录在分支中的机器人程序即被运行。
∙无效的程序号会导致程序跳转至“ 默认的” 分支中。
∙运行成功结束后会自动重复这一循环。
更改CELL•操作步骤:1. 切换到“ 专家” 用户组2.打开CELL.SRC。
3.在“CASE” 段中将名称“EXAMPLE” 用•应从相应的程序编号调出的程序的•名称替换。
删除名称前的分号。
4. 关闭程序并保存更改更改外部自动接口,根据标准填写输入接口信号。
输出信号变量说明∙PERI_RDY 通过设定这个输出,机器人控制器与主计算机通讯驱动器接通的细节ALARM_STOP 在急停情况下复位该输出。
正常一直为1,急停为0 ∙USER_SAF如果安全栅栏监控开关被打开(在AUTO方式下)或使能开关被释放(在TEST方式下)复位该输出。
kuka机器人操作说明(草稿)(精选5篇)

kuka机器人操作说明(草稿)(精选5篇)第一篇:kuka机器人操作说明(草稿)系统自动运行操作流程(草稿)1,打开气源2,机器人开机3,T1模式,手动操作,进入专家界面(菜单“配置”下选择“用户组”,选择“专家“,输入密码“KUKA”)4,首先查看,菜单“显示”下选择“WINACPANEL”,查看PLC是否运行,或者查看三色灯黄灯是否亮5,然后,I/O重新配置,菜单“配置”下选择“输入输出”,再选择“输入输出重新配置” 6,选择CELL程序,手动运行CELL程序(RUN HOME时,即机器人运行到HOME时,要注意观察有无干涉),机器人到HOME点后,继续启动运行CELL程序(再按一次KCP上“启动“),运行到“AUTOEXT INI”这一行后;再选择菜单“程序“下其“程序复位”选项,然后,再手动运行CELL程序到HOME点这一行即可7,确认信息8,选择“EXT”模式,即外部自动模式9,按KOP上“复位”按钮(确认安全门)10,注塑机选择自动11,再按“启动”按钮12,再按注塑机上“启动”按钮13,系统启动另外:1,模具间有工件的处理:注塑机选择手动,再按一下KOP上“功能键“按钮;机器人手动回HOME点(注意干涉),CELL程序复位,系统再重新启动运行。
2,夹具掉件的处理:(掉件启用时)a,系统自动运行,掉件,确认信息,出现等待(WAIT FOR $IN[357]),此时,可以取消等待(按一下KOP上功能键),系统正常运行回HOME点(不带件)。
b,系统自动运行,掉件,确认信息,没有出现等待,则系统正常运行回HOME点后(不带件),再按一下KOP上“功能键“按钮。
c,若是系统自动运行,掉件,机器人停在中间,则确认信息,手动把机器人带回安全位置,然后,再重做上面“系统自动运行操作流程“第5步开始以后的步骤即可。
注意:如果掉件暂时不用报警信息提示,则可以把R1Systemsps.sub文件打开,文件里面:IF $IN[291] THENIF $IN[291] THENGRP_MSG(1)改为;GRP_MSG(1)即可。
关于Step7与KUKA机器人外部自动启动配置总结
机器人循环自动启动运行条件
27th August 2014
21
21
六、PLC程序-机器人控制功能块配置
生产线启动机器人的外部启动条件
生产线停止机器人的外部停止条件
该信号常规为“1”
机器人全部工作结束反馈信号
机器人循环自动启动运行条件
27th August 2014
22
22
六、PLC程序-机器人控制功能块配置
下面讲述如何配置“#Robot-KUKA”标准功能块来进行外部自动启动机器人控制。
27th August 2014
18
18
六、PLC程序-机器人控制功能块配置
填写线体和工位DB数据块,主要提供线体和工位 模式控制信号
配置HMI 控制地址信号 配置HMI 状态可视化地址信号 配置机器人报警 DB地址 配置PLC与机器人交互IO的起始地址(此处比较关键) 配置机器人在HMI画面的编号和位置
27th August 2014
外部自动运行接口IO信号概览
5
5
一、接口信号定义说明
通过外部PLC对机器人自动运行进程进行控制,其控制原理是:外部PLC通过外部自动运行接口向 机器人控制系统发出机器人进程的相关信号(如:运行许可、故障确认、程序启动等),机器人控制 系统向外部PLC系统发送有关运行状态和故障状态的信息。
此次KUKA机器人控制功能块采用Fiat提供的Comau机器人标准功能块(FB212),该功能块用 于KUKA机器人控制不能完全适用,但IO信号的时序逻辑基本相似;根据KUKA机器人的启动时序和应 用要求,我们在此块的基础上进行了修改和完善,使之成为GF2项目KUKA机器人PLC程序控制标准功 能块,修改后的功能块也经过了客户评审确认后投入正式使用。
库卡机器人编程及程序库总结
库卡机器人编程及程序库总结概述库卡机器人(KUKA Robot)是一种工业机器人,由德国KUKA公司开发和生产。
它具有高精度、高速度和高负载能力,广泛应用于汽车制造、物流和机械加工等领域。
库卡机器人的编程及程序库是实现其自动化操作和控制的关键。
在库卡机器人编程中,主要涉及到以下几个方面的内容:机器人语言、机器人控制器、程序开发环境和程序库。
机器人语言库卡机器人语言是一种特定于库卡机器人的编程语言,用于描述机器人的动作和操作。
它包括以下几个重要观点:1.关键字和语法规则:库卡机器人语言具有一系列的关键字和语法规则,用于表示不同的动作和操作。
例如,MOVJ表示关节运动,MOVL表示直线运动,WAIT表示等待指令等。
2.坐标系:库卡机器人语言使用不同的坐标系来描述机器人的位置和姿态。
常用的坐标系包括基坐标系(Base Coordinate System)、工具坐标系(Tool Coordinate System)和用户坐标系(User Coordinate System)等。
3.变量和数据类型:库卡机器人语言支持变量和不同的数据类型,用于存储和处理数据。
常见的数据类型包括整型、浮点型和字符串型。
4.逻辑和控制结构:库卡机器人语言支持条件判断和循环等控制结构,用于实现复杂的逻辑和流程控制。
机器人控制器库卡机器人控制器是机器人的核心部件,用于控制机器人的运动和操作。
它包括以下几个关键发现:1.硬件结构:库卡机器人控制器由主控制器和外围设备组成,主控制器负责控制机器人的运动,外围设备包括输入输出模块、传感器和执行器等。
2.通讯接口:库卡机器人控制器支持多种通讯接口,用于与外部设备进行数据交换和控制。
常见的通讯接口包括以太网、串口和数字输入输出等。
3.运动控制:库卡机器人控制器具有强大的运动控制能力,可以实现精确的位置控制和轨迹规划。
它可以根据编程指令控制机器人的关节运动和直线运动等。
4.安全保护:库卡机器人控制器内置了多种安全保护功能,可以检测和处理异常情况,确保机器人和操作人员的安全。
KUKA机器人外部启动配置信号
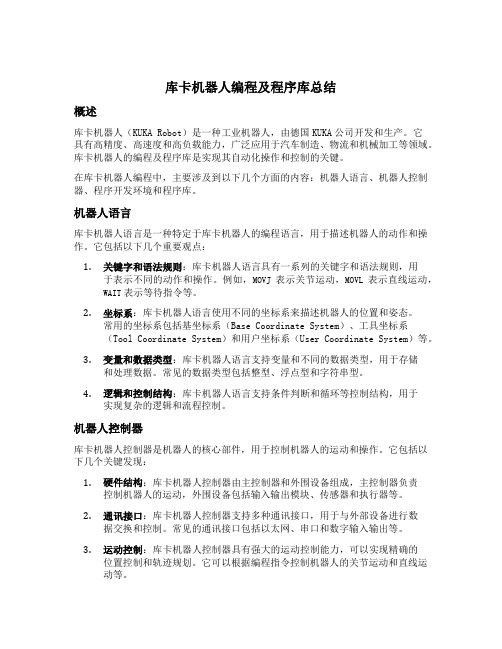
KUKA机器人配置外部启动忍不住吐槽一下,库卡的技术文档做的真的不咋地,看的人真心累,对于初学者尤其如此,而且网上的资料大多重复,很多问题找不到答案。
下面进入正题吧。
主要看一下外部启动相关的信号释义用PLC作为主站,KUKA机器人作为从站,PLC控制机器人启动的重要信号一览:信号具体含义如下:输入端(从机器人控制器的角度)➢PGNO_TYPE - 程序号类型此变量确定了以何种格式来读取上级控制系统传送的程序编号* 采用这种传递格式时,未对PGNO_REQ、PGNO_PARITY 以及PGNO_VALID 的值进行分析,因此无意义。
一般情况下设该值为1,符合大多数读写习惯➢PGNO_LENGTH - 程序号长度此变量确定了上级控制系统传送的程序编号的位宽。
值域:1 …16。
若PGNO_TYPE 的值为2,则只允许位宽为4、8、12 和16。
程序号变量所占用得地址宽度,例如设为8,则PGNO变量占一个BYTE➢PGNO_PARITY - 程序号的奇偶位上级控制系统传递奇偶位的输入端。
如果PGNO_TYPE 值为3,则PGNO_PARITY 不被分析。
这个没看太明白,但是不能胡乱设置,会影响程序号的传递。
目前设成0没发现问题➢PGNO_VALID - 程序号有效上级控制系统传送读取程序号指令的输入端。
这个信号别看太多了,只要知道是占用1bit的开关量信号就行了,在机器人启动并给定程序号后,发送该信号给机器人,相当于确认信号。
(忍不住也吐槽一下,就一个位信号,他这表格里说的正值,负值和0是指哪个,不明白唉)➢$EXT_START - 外部启动这个就简单直白了,启动信号,上升沿有效,可以给出去一段时间后撤销。
➢$MOVE_ENABLE - 允许运行由PLC给机器人的,配置Profinet后,该信号是机器人运动的必要前提条件,不管是EXT 模式还是T1模式,该信号必须给定并保持。
➢$CONF_MESS - 确认信息提示上升沿有效,相当于故障复位信号。
KUKA机器人启动时序

KUKA启动时序KUKA启动时序1.系统准备1.1 确保所有程序、示教器程序和相关设备程序都已正确安装在控制器上。
1.2 确保所有操作员具备必要的培训和资质,并且了解的操作流程和安全规范。
1.3 检查控制器的电源和网络连接是否正常。
2.首次启动2.1 执行器件检查和润滑:检查的执行器件是否安装正确,并根据操作手册进行必要的润滑。
2.2 检查传感器和外设连接:确保传感器和外设已正确连接,并进行必要的校准。
2.3 控制器启动:按照操作手册中的指引,将控制器启动并进行初始化设置。
3.网络配置3.1 设置IP地质:根据网络环境的要求,在控制器中设置正确的IP地质和子网掩码。
3.2 配置网络参数:根据实际需求,配置的网络参数,如网关、DNS服务器等。
4.程序加载和校验4.1 确认控制器中已经加载了所需的程序。
4.2 检查程序的正确性:对加载的程序进行校验,确保程序的正确性和可靠性。
4.3 设置程序变量:根据实际需求,设置程序中的变量和参数。
5.安全设置5.1 设置安全区域:根据实际工作环境,设置的安全区域,并使用围栏或其他安全设备进行固定和封闭。
5.2 配置保护装置:根据工作需求,配置的保护装置,如安全门、光栅等。
5.3 设置急停开关:确保的急停开关设置正确,并进行必要的测试和演练。
6.手动操作和示教6.1 手动操作:使用示教器或HMI界面,进行的手动操作,如移动、旋转等。
6.2 示教:按照操作手册中的指引,进行的示教操作,如示教路径、示教程序等。
6.3 验证示教结果:根据示教的路径和程序,验证示教结果的正确性。
7.启动7.1 确认工作环境安全:确保周围没有障碍物,并保持操作区域的整洁和安全。
7.2 启动控制器:按照操作手册中的指引,启动控制器。
7.3 执行启动程序:加载并执行的启动程序。
附件:1.操作手册:包含的操作流程、安全规范以及启动程序的设置和操作说明。
2.示例程序:用于演示启动时序的示例程序。
法律名词及注释:1.IP地质:IP地质是Internet Protocol Address的缩写,用于唯一标识连接到互联网的设备的地质信息。
KUKA机器人选择自动模式3.1

KUKA机器人选择自动模式
KUKA机器人手动示教完成后,如果在自动模式下运行程序,通过以下简单几步即可完成切换自动模式。
一、在路径:R1-Program文件下选择需要运行的程序如“x1”程
序,点击选定进入程序。
二、在T1手动模式下运行程序至“BCO位置”:按下使能键和启
动键运行程序,第一行运动指令运行结束后,在提示信息栏会出现“已达BCO”的提示信息。
三、向右旋转示教器上的钥匙,出现四种运行模式:T1、T2、AUT、
EXT。
选择AUT自动模式。
四、再旋回钥匙,按下示教器上的启动按钮即可,机器人就会自
动运行程序了。
KUKA机器人启动时序

引言概述:KUKA被广泛应用于工业自动化领域,其启动时序的控制对于的正常运行至关重要。
本文将详细介绍KUKA启动时序的内容和步骤,包括的电源接入、关节复位、坐标系设置、模式切换以及安全系统确认等。
正文内容:1.电源接入确保与电源正常连接,并检查电源线是否正常工作。
按照KUKA的电源接入指南将电源线接入的电源插座。
确认控制器上的电源指示灯是否点亮,其中绿色灯表示电源正常连接。
2.关节复位在上电后,按下关节复位按钮使的关节回到初始位置。
通过观察的关节位置指示器,确保关节已经成功复位。
关节复位后,可以通过手动操作来验证是否回到了正确的初始位置。
3.坐标系设置在关节复位后,需要设置的工作坐标系。
使用KUKA的编程界面或者外部编程工具,设置的基准位置和坐标系。
确保的坐标系设置准确,以确保能够准确执行后续任务。
4.模式切换在坐标系设置完成后,需要切换的工作模式。
KUKA通常具有自动、示教和手动三种不同的模式。
根据实际需求,选择合适的模式来进行的操作和控制。
5.安全系统确认在完成所有配置和设置后,需要确保的安全系统处于正常工作状态。
确认的安全门是否已关闭,并且安全系统的指示灯是否显示正常。
如果安全系统存在异常,需要进行相应的故障排除和修复,以确保运行时的安全性。
总结:KUKA的启动时序对于的正常运行至关重要。
本文从电源接入、关节复位、坐标系设置、模式切换以及安全系统确认等几个方面对KUKA启动时序进行了详细的阐述。
正确按照这些步骤进行的启动,能够确保能够安全、准确地执行任务,并提高工作效率。
KUKA安全机器人设置分析
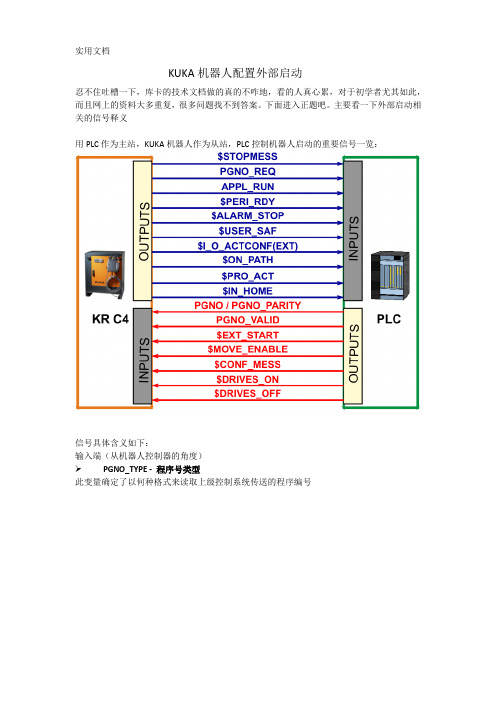
激活监控空间
始终关闭=监视空间未激活。 常亮=监视空间始终处于活动状态。 通过ProfiSafe =监视空间由PROFIsafe激活。 默认值:始终关闭
by ProfiSafe: 现在使用
反馈 OUT4byte 监视空间1至16 分配:位0 =监视空间1…位7 =监视空间8(笛卡尔) 0 =监视空间处于活动状态。 1 =监视空间未激活。
可以配置对违反工作区的反应(停止机器人–无反应)
可以监视轴特定速度和笛卡尔速度。 每个轴的速度都可以根据极限值进行监控 轴速度极限值 T1模式的轴速度极限值 最大轴速度极限值 可以监视活动工具的TCP处的笛卡尔速度-速度监视参考$ WORLD 刀具TCP处降低的速度的极限值 T1模式下工具TCP处降低的速度的极限值 TCP和工具球中心点的最大速度的极限值(与空间无关)
输入字节 6
0 … 7 WZ1 … 8 工具选择 1… 8 分配: 位 0 = 工具 1 … 位 7 = 工具 8 0 = 工具未激活 1 = 工具已激活 必须总是已选一个工具
输入字节 7
0 … 7 WZ9 … 16 工具选择 9… 16 分配: 位 0 = 工具 9 … 位 7 = 工具 16 0 = 工具未激活 1 = 工具已激活 必须总是已选一个工具
TravAngleE1 = 15.0
TravAngleE2 = 15.0
TravAngleE3 = 15.0
TravAngleE4 = 15.0
TravAngleE5 = 15.0
TravAngleE6 = 15.0
MaxSafetyFactor = 1.1 最大安全系数
通过 电柜 通过 ProfIsafe
safety fence 安全区域 笛卡尔监控范围:
?FANUC机器人必须掌握的自动启动教程

FANUC机器人必须掌握的自动启动教程FANUC 机器人自动启动教程
今天太忙了,早上没时间码字,今天我们来聊聊FANUC机器人自动启动的条件,我可以说,如果不懂得机器人启动的控制条件,当出现机器人想运行自动而等待条件时,只能指望PLC工程解决,总是指望别人,技术难免进步,而我幸运的是曾经的项目PLC与机器人调试都是一手包办哈,所以遇到故障时还是能尽快找到原因,今天就来举例FANUC机器人的启动条件,往后的KUKA,ABB,以及所有的机器人就会有概念,能实现举一反三。
系统信号的定义
1.所需启动的机器人程序可以使用外部控制设备如PLC等通过信号的输入、输出来选择和执行。
2.系统信号是机器人发送和接收外部控制设备的信号,以此实现机器人程序运行。
自动运行的启动条件一
1.控制柜模式开关置为AUTO档
2.非单步执行状态
3.UI[1]、UI[2]、UI[3]、UI[8]为ON
4.TP为OFF
以上四点必须全部满足
自动运行启动条件二UI信号设置为有效
自动运行启动条件三自动模式为REMOTE
自动运行启动条件四
系统变量$RMT_MASTER为0(默认值为0)
自动运行需使用的信号
选择自动运行所执行程序的信号
以上就是FANUC 机器人必须掌握的自动启动教程。