分析超静定结构的基本方法
高等工程力学1 超静定结构内力计算

M i 、Qi、N i ——任取的基本体系在单位力作用下的内力图,而单位力是加在 要求位移的截面上的;
—RK—基本体系支座k在单位力作用下的反力;
cK——k支座的实际位移。 公式(1-7)的前三项表示基本体系在荷载和多余未知力的作用下的位移,后
三项表示基本体系在温度变化和支座移动情况下引起的位移。
1 超静定结构内力计算
⑵ 有结点线位移的情况 计算这类结构时;原利用公式(1-11)考虑各结点的弯矩平衡外,还需考虑 相应杆端剪力的平衡。取适当的截面截出结构的一部分,通常是截断各柱的柱顶 端。取出横梁。考虑剪力平衡,建立剪力平衡方程,即
Qx 0
(1-12)
补充了剪力平衡方程后,方程式的数目仍然与未知数的数目相等,方程式总是 可以求解的。
1 超静定结构内力计算
§1.1.1力法的基本原理(续4)
由力法方程解出未知力X1、X2、…Xn后,超静定结构的内力可根据叠加原理 用下式计算:
M M1X1 M2X2 MnXn MP Q Q1 X 1 Q2 X 2 Qn X n QP N N1X1 N2 X 2 Nn X n NP
§1.2.4利用典型方程求解结构的位移和内力(续1)
同理附加链杆处的反力也为零,即
R2 R21 R22 R2P 0
或写成
r11Z1 r12Z2 R1P 0 r21Z1 r22Z2 R2P 0
对于有n个基本未知数的结构,位移法典型方程式为:
r11Z1 r12 Z2 r1n Zn R1P 0 r21Z1 r22 Z2 r2n Zn R2P 0
§1.2.1等截面直杆的转角位移方程式(续1)
AB杆产生位移后,杆端的总弯矩为
M AB
M
/ AB
M
常见一次超静定梁力法基本体系的选取

图 3 Mˉ1 图
图 4 MP图
系数项等于单位荷载弯矩图自身图乘。此时单位荷载弯矩
图在 l/2 处出现折点,用图乘法计算系数项时,需要分段进行图
乘,弯矩图左右两跨对称,算出一侧乘 2 即可,最终图乘结果如下:
δ11 =
1 EI
(
1 2
×
l 2
× 1×
2 3
)× 2 =
l 3EI
自由项等于单位荷载弯矩图和荷载弯矩图进行图乘。此时
力法基本体系的选取原则如下:
a. 只能解除原结构中的多余约束,不能解除必要约束。用
力法计算超静定结构的基本思路就是将超静定结构求解转化为
静定结构求解,如果解除了必要约束,此时体系就变为几何可
变,不再能使用力法求解。
b. 只能从原结构中解除约束,不能增加约束。新增约束的
出现会使基本体系与原结构的位移不能保持一致,满足不了基
Copyright©博看网 . All Rights Reserved.
工程设计
一个集中力 P 为例分别来计算这两种基本体系的系数项和自 由项。
第一种基本体系的单位荷载弯矩图(Mˉ1 图)是只考虑中部铰 结点处一组单位力偶所产生的弯矩(如图 3 所示),荷载弯矩图 (MP图)是只考虑基本结构上右跨跨中作用集中力 P 所产生的弯 矩(如图 4 所示)。
MP图只有右跨出现弯矩,用图乘法计算系数项时,只需将右跨的 单位荷载弯矩图和荷载弯矩图进行图乘。图乘时 MP图取 A,Mˉ1
图取 yc,图乘结果如下:
Δ1P =
1 EI
(
1 2
×
l 2
×
1 8
Pl
×
1 2
)× 2 =
Pl2 64EI
超静定结构的受力分析及特性
超静定结构的受力分析及特性一、超静定结构的特征及超静定次数超静定结构的静力特征是仅由静力平衡条件不能唯一地确定全部未知反力和内力。
结构的多余约束数或用静力平衡条件计算全部未知反力和内力时所缺少的方程数称为结构的超静定次数。
通常采用去除多余约束的方法来确定结构的超静定次数。
即去除结构的全部多余约束,使之成为无多余约束的几何不变体系,这时所去除的约束数就是结构的超静定次数。
去除约束的方法有以下几种:(一)切断一根两端铰接的直杆(或支座链杆),相当于去除一个约束。
(二)切断一根两端刚接的杆件,相当于去除三个约束。
(三)切断——个单铰(或支座固定铰),相当于去除二个约束;切断一个复铰(连接n根杆件的铰),相当于去除2(n—1)个约束。
(四)将单刚结点改为单铰节点,相当于去除一个约束;将连接n个杆件的复刚节点改为复铰节点,相当于去除n—1个约束。
去除一个超静定结构多余约束的方法可能有几种,但不管采用哪种方法,所得超静定次数一定相同。
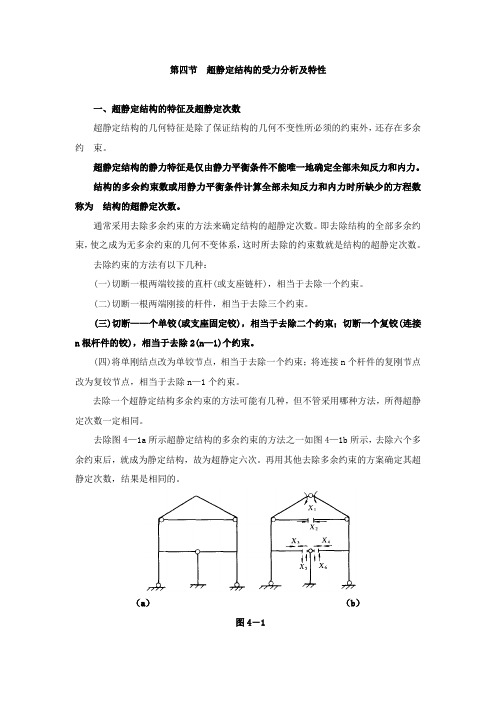
去除图4—1a所示超静定结构的多余约束的方法之一如图4—1b所示,去除六个多余约束后,就成为静定结构,故为超静定六次。
再用其他去除多余约束的方案确定其超静定次数,结果是相同的。
二、力法的基本原理(一)力法基本结构和基本体系去除超静定结构的多余约束,代以相应的未知力Xi (i=1、2、…、n),Xi 称为多余未知力或基本未知力,其方向可以任意假定。
去除多余约束后的结构称为力法基本结构。
力法基本结构在各多余未知力、外荷载(有时还有温度变化、支座位移等)共同作用下的体系称为力法基本体系,它是用力法计算超静定结构的基础。
选取力法基本结构应注意下面两点:1.基本结构一般为静定结构,即无多余约束的几何不变体系。
有时当简单超静定结构的解为已知时,也可以将它作为复杂超静定结构的基本结构,以简化计算。
2.选取的基本结构应使力法典型方程中的系数和自由项的计算尽可能简便,并尽量使较多的副系数和自由项等于零。
浅析超静定结构计算中力法与位移法的异同

浅析超静定结构计算中力法与位移法的异同作者:赵浩楠来源:《科学与财富》2019年第17期摘要:力法和位移法是结构力学中计算超静定结构的两种基本方法,这两种计算方法既有相同之处,又有不同之处,本文从二者的基本原理、基本未知量、基本体系及典型方程等方面对比分析力法与位移法在结构计算中的异同。
关键词:超静定结构;力法;位移法;异同在实际工程计算中,大多数结构都是超静定的,结构力学计算通常包括两个部分:内力计算和位移计算,力法和位移法在结构力学中是计算超静定结构的两种基本方法,二者既有相同的地方也有许多不同之处。
相同之处在于二者的分析依据相同,并且最终目的都是为了求解出结构的内力和支座反力;不同之处主要是在于两者的基本原理、基本未知量、基本体系和典型方程不同。
1 力法与位移法对比分析之同1.1 分析依据超静定结构计算中,力法和位移法是常用的两种计算方法。
所谓的超静定结构即指具有多余约束的几何不变体系、基于静力平衡条件不能唯一确定内力和反力的结构。
力法和位移法不仅考虑静力平衡条件,还考虑了变形协调条件及物理条件,从而对超静定结构进行求解。
1.2 目的力法和位移法都是综合利用静力平衡条件、变形协调的几何条件、应力与应变间本构关系的物理条件,根据各自的简单基本结构和关于基本未知量的基本方程,先求解出基本未知量,再求出剩余未知量,最终求解出实际工程中常见的超静定结构各截面的内力和支座反力。
力法和位移法都是综合利用静力平衡条件、变形协调及物理关系三个方面的条件,使各自基本体系与原结构的受力、变形情况一致,从而应用基本体系建立相应的典型方程以达到分析原结构的目的。
2 力法与位移法对比分析之异2.1 基本原理结构在一定的荷载作用下,其内力与位移有一定的关系,简单来说,在分析超静定结构时,力法是先求出结构内力,然后计算其相应的位移;而位移法是先确定位移,再根据位移求出结构内力。
力法的基本原理是:通过撤除多余约束把多余未知力作为基本未知量,将分析超静定结构转化为分析相应的基本结构,然后根据多余约束处的变形协调条件(位移条件)建立力法基本方程,求出基本未知量后即可通过静力平衡条件求出结构的全部内力。
超静定结构两类解法

第六章位移法超静定结构两类解法:力法:思路及步骤,适用于所有静定结构计算。
结合位移法例题中需要用到的例子。
有时太繁,例。
别的角度:内力和位移之间的关系随外因的确定而确定。
→位移法,E,超静定梁和刚架。
于是,开始有人讨论:有没有别的方法来求解或换一个角度来分析…,what?我们知道,当结构所受外因(外荷载、支座位移、温度变化等)一定⇒内力一定⇒变形一定⇒位移一定,也就是结构的内力和位移之间有确定的关系(这也可以从位移的公式反映出来)。
力法:内力⇒位移,以多余力为基本未知量…,能否反过来,也就是先求位移⇒内力,即以结构的某些位移为基本未知量,先想办法求出这些位移,再求出内力。
这就出现了位移法。
目前通用的位移法有两种:英国的、俄罗斯的,两者的实质是相同的。
以结构的某些结点位移作为基本未知量,由静力平衡条件先求出他们,再据以求出结构的内力和其它位移。
这种方法可以用于求解一些超静定梁和刚架,十分方便。
例:上面的例子,用位移法求解,只有结点转角一个未知量。
下面,我们通过一个简单的例子来说明位移法的解题思路和步骤:一个两跨连续梁,一次超静定,等截面EI=常数,右跨作用有均布荷载q,(当然可以用力法求解),在荷载q作用下,结构会发生变形,无N,无轴向变形,B点无竖向位移,只有转角ϕB。
且B点是一个刚结点传递M;变形时各杆端不能发生相对转动和移动,刚结点所连接的杆件之间角度受力以后不变。
也就是AB、BC杆在结点B处的转角是相同的。
原结构的受力和变形情况和b是等价的。
B当作固定端又产生转角ϕB。
a(原结构)AB:BC:b如果把转角ϕB 当作支座位移这一外因看,则原结构的计算就可以变成两个单跨超静定梁来计算。
显然,只要知道ϕB ,两个单跨静定梁的计算可以用力法求解出全部反力和内力,现在的未知量是ϕB (位移法的基本未知量)。
关键:如何求ϕB ?求出ϕB 后又如何求梁的内力?又如何把a ⇒b 来计算? 我们采用了这样的方法:假定在刚结点B 附加一刚臂(▼),限制B 点转角,B ⇒固定端(无线位移,无转动)(略轴向变形)原结构就变成了AB 、BC 两个单跨超静定梁的组合体:AB : ,BC :但现在和原结构的变形不符,ϕB ,所以为保持和原结构等效,人为使B 结点发生与实际情况相同的转角ϕB (以Z 1表示,统一)。
超静定结构的概念及超静定次数的确定(PPT)
04 超静定结构的实际应用
桥梁工程
桥梁工程中,超静定结构的应用可以增加结构的稳定性和安全性,提高桥梁的承 载能力。例如,连续梁桥采用超静定结构形式,可以减小梁体的振动和变形,提 高行车舒适性和安全性。
此外,超静定结构在桥梁工程中还可以用于抵抗风、地震等自然灾害的影响,提 高桥梁的抗震性能和抗风能力。
ቤተ መጻሕፍቲ ባይዱ
渐进法
总结词
通过逐步逼近的方法求解超静定结构的位移和内力的方法。
详细描述
渐进法是一种基于迭代思想的求解方法,通过逐步逼近的方法求解超静定结构的位移和内力。该方法首先假设一 组初始解,然后逐步修正解的近似值,直到满足精度要求或达到预设的迭代次数为止。渐进法可以处理复杂的超 静定结构问题,具有较高的计算效率和精度。
建筑工程
在建筑工程中,超静定结构的应用可以提高结构的稳定性和 刚度,增强建筑物的承载能力和抗震性能。例如,高层建筑 采用超静定结构形式,可以减小风力、地震等外部荷载对建 筑物的影响,保证建筑物的安全性和稳定性。
此外,超静定结构在建筑工程中还可以用于优化建筑物的空 间布局和结构形式,提高建筑物的美观性和实用性。
超静定结构
在任何一组确定的平衡力系作用 下,需要用多余的约束条件才能 确定结构的平衡状态的体系。
超静定结构的特性
具有多余的约束
超静定结构有多余的约束,这些 多余的约束可以提供额外的稳定 性,使结构在受到外力作用时具
有更好的抵抗变形的能力。
存在内力
由于超静定结构的约束多余,当 受到外力作用时,会在结构内部 产生内力,这些内力有助于抵抗
判别准则二
如果一个结构的支座反力数目小于其约束数目, 则该结构为超静定结构。
判别准则三
如果一个结构的受力状态不能由静力平衡方程完 全确定,则该结构为超静定结构。
柔度法名词解释
柔度法名词解释柔度法(flexibility method)是2003年公布的土木工程名词。
又称力法。
以多余约束力为未知量求解超静定结构内力的基本方法,又称柔度法(flexibility method)。
由英国麦克斯韦(J.C.Maxwell)于1864年提出。
用力法求解超静定结构时,首先要解除结构的多余约束并代以未知的多余约束力,将得到的静定结构作为力法的基本系。
根据基本系上解除约束处受各种影响产生的位移和原结构相应处位移一致的条件(位移协调条件),列出力法的典型方程,解出多余约束力,进而可以应用平衡条件求得任一截面内力。
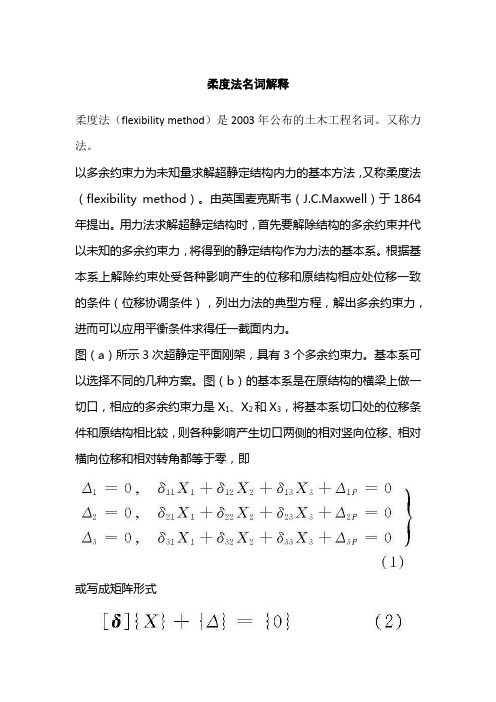
图(a)所示3次超静定平面刚架,具有3个多余约束力。
基本系可以选择不同的几种方案。
图(b)的基本系是在原结构的横梁上做一切口,相应的多余约束力是X1、X2和X3,将基本系切口处的位移条件和原结构相比较,则各种影响产生切口两侧的相对竖向位移、相对横向位移和相对转角都等于零,即或写成矩阵形式式中,[δ]为柔度矩阵,它的元素δij为柔度系数,表示基本系上由于单位力X j=1作用所产生的X i方向上的位移,根据位移互等定理,有δij=δji,即[δ]为对称矩阵;{Δ}为位移列阵,它的元素Δip表示基本系上由于荷载作用产生的X i方向上的位移; {X}为多余未知力列阵。
从能量原理的角度考虑,若用多余约束力表示结构的余能,即(X1,X2,…,X n),则由最小余能原理同样可以得到上述力法典型方程。
力法计算超静定刚架图(a)刚架结构;(b)力法基本系力法适用于计算超静定桁架、超静定拱、超静定刚架以及组合结构等。
土木工程《结构力学》概念解释:柔度法:在解题方面来说就是先求出柔度系数,用柔度系数解出圆频率,进而算出所求内容,一般是在求连续梁或简支梁时使用刚度法:相对应的就是用刚度系数k求解的方法,一般是求刚架时用这种方法刚度矩阵:这没啥说的,书上写的很明白,就那个矩阵,用时能写出来就行了等效结点荷载:是用矩阵位移法的方法,等效出杆件荷载的一组力,方便用这种方法计算动力系数:最大动位移和最大静位移的比值,在计算外部荷载引起的震动位移时,需要乘上这个系数自振频率,自振周期:和物理上频率周期是一个性质的单位定向向量:就是一组标记向量,现在各节点进行标注,刚结点(0 0 0 )铰接点(0 0 1)这个认真看课本,然后与单位等效荷载相乘得到整体等效结点荷载,与单位刚度矩阵相乘得到整体刚度矩阵。
李廉锟《结构力学》(上册)课后习题详解(8-11章)【圣才出品】

第8章位移法复习思考题1.位移法的基本思路是什么?为什么说位移法是建立在力法的基础之上的?答:(1)位移法的基本思路位移法的基本思路是首先确定原结构的基本未知量,加入附加联系从而得基本结构,令各附加联系发生与结构相同的结点位移;再根据在荷载等外因和各结点位移共同作用下,各附加联系上的反力偶或反力均等于零的条件,建立方程,求出未知位移;最后求出结构反力和内力。
(2)位移法是建立在力法的基础之上的原因因为位移法的基本结构是两端固定的或一端固定一端铰支的单跨超静定梁。
位移法进行计算是以这些基本结构为基础的,需要用力法算出单跨超静定梁在杆端发生各种位移时以及荷载等因素作用下的内力,才能继续进行位移法以后的求解。
2.位移法的基本未知量与超静定次数有关吗?答:位移法的基本未知量与超静定次数无关。
因为位移法的基本未知量是指独立的结点的角位移和独立的结点的线位移,而这两个量与超静定次数并无关系。
3.位移法的典型方程是平衡条件,那么在位移法中是否只用平衡条件就可以确定基本未知量,从而确定超静定结构的内力?在位移法中满足了结构的位移条件(包括支承条件和变形连续条件)没有?在力法中又是怎样满足结构的位移条件和平衡条件的?答:(1)在位移法中只用平衡条件就可以确定基本未知量,从而确定超静定结构的内力。
(2)在位移法中已满足结构的位移条件(包括支承条件和变形连续条件)。
因为在位移法的假设和取基本未知量时,结构的支承条件和变形连续条件就已经考虑进去了,所以位移法中结构的位移条件自动满足,故只需要平衡条件就可以确定基本未知量了。
(3)力法的典型方程实质上就是满足结构的位移条件(包括支承条件和变形连续条件)。
力法是在满足平衡条件下进行分析的,只要结构不破坏,平衡条件会自动满足。
4.在什么条件下独立的结点线位移数目等于使相应铰结体系成为几何不变所需添加的最少链杆数?答:不考虑受弯直杆的轴向变形(即受弯直杆两端距离不变)的条件下,独立的结点线位移数目等于使相应铰结体系成为几何不变所需添加的最少链杆数。
超静定结构的受力分析及特性超静定结构的特征及超静定
第四节超静定结构的受力分析及特性一、超静定结构的特征及超静定次数超静定结构的几何特征是除了保证结构的几何不变性所必须的约束外,还存在多余约束。
超静定结构的静力特征是仅由静力平衡条件不能唯一地确定全部未知反力和内力。
结构的多余约束数或用静力平衡条件计算全部未知反力和内力时所缺少的方程数称为结构的超静定次数。
通常采用去除多余约束的方法来确定结构的超静定次数。
即去除结构的全部多余约束,使之成为无多余约束的几何不变体系,这时所去除的约束数就是结构的超静定次数。
去除约束的方法有以下几种:(一)切断一根两端铰接的直杆(或支座链杆),相当于去除一个约束。
(二)切断一根两端刚接的杆件,相当于去除三个约束。
(三)切断——个单铰(或支座固定铰),相当于去除二个约束;切断一个复铰(连接n根杆件的铰),相当于去除2(n—1)个约束。
(四)将单刚结点改为单铰节点,相当于去除一个约束;将连接n个杆件的复刚节点改为复铰节点,相当于去除n—1个约束。
去除一个超静定结构多余约束的方法可能有几种,但不管采用哪种方法,所得超静定次数一定相同。
去除图4—1a所示超静定结构的多余约束的方法之一如图4—1b所示,去除六个多余约束后,就成为静定结构,故为超静定六次。
再用其他去除多余约束的方案确定其超静定次数,结果是相同的。
(a)(b)图4-1二、力法的基本原理(一)力法基本结构和基本体系去除超静定结构的多余约束,代以相应的未知力X i (i=1、2、…、n),X i 称为多余未知力或基本未知力,其方向可以任意假定。
去除多余约束后的结构称为力法基本结构。
力法基本结构在各多余未知力、外荷载(有时还有温度变化、支座位移等)共同作用下的体系称为力法基本体系,它是用力法计算超静定结构的基础。
选取力法基本结构应注意下面两点:1.基本结构一般为静定结构,即无多余约束的几何不变体系。
有时当简单超静定结构的解为已知时,也可以将它作为复杂超静定结构的基本结构,以简化计算。
李廉锟《结构力学》(上册)课后习题详解(8-11章)【圣才出品】
第8章位移法复习思考题1.位移法的基本思路是什么?为什么说位移法是建立在力法的基础之上的?答:(1)位移法的基本思路位移法的基本思路是首先确定原结构的基本未知量,加入附加联系从而得基本结构,令各附加联系发生与结构相同的结点位移;再根据在荷载等外因和各结点位移共同作用下,各附加联系上的反力偶或反力均等于零的条件,建立方程,求出未知位移;最后求出结构反力和内力。
(2)位移法是建立在力法的基础之上的原因因为位移法的基本结构是两端固定的或一端固定一端铰支的单跨超静定梁。
位移法进行计算是以这些基本结构为基础的,需要用力法算出单跨超静定梁在杆端发生各种位移时以及荷载等因素作用下的内力,才能继续进行位移法以后的求解。
2.位移法的基本未知量与超静定次数有关吗?答:位移法的基本未知量与超静定次数无关。
因为位移法的基本未知量是指独立的结点的角位移和独立的结点的线位移,而这两个量与超静定次数并无关系。
3.位移法的典型方程是平衡条件,那么在位移法中是否只用平衡条件就可以确定基本未知量,从而确定超静定结构的内力?在位移法中满足了结构的位移条件(包括支承条件和变形连续条件)没有?在力法中又是怎样满足结构的位移条件和平衡条件的?答:(1)在位移法中只用平衡条件就可以确定基本未知量,从而确定超静定结构的内力。
(2)在位移法中已满足结构的位移条件(包括支承条件和变形连续条件)。
因为在位移法的假设和取基本未知量时,结构的支承条件和变形连续条件就已经考虑进去了,所以位移法中结构的位移条件自动满足,故只需要平衡条件就可以确定基本未知量了。
(3)力法的典型方程实质上就是满足结构的位移条件(包括支承条件和变形连续条件)。
力法是在满足平衡条件下进行分析的,只要结构不破坏,平衡条件会自动满足。
4.在什么条件下独立的结点线位移数目等于使相应铰结体系成为几何不变所需添加的最少链杆数?答:不考虑受弯直杆的轴向变形(即受弯直杆两端距离不变)的条件下,独立的结点线位移数目等于使相应铰结体系成为几何不变所需添加的最少链杆数。
结构力学 位移法
分析方法:
该题有一个刚结点,因此有一个转角位移。水平线位移 的分析方法:假设B结点向左有一个水平位移△,BC杆平 移至B’C’,然后它绕B’转至D点。
D
B
E
C
A
注意:
(1)铰处的转角不作基本未知量。
Δ
(2)剪力静定杆的杆端侧移也可不作为基本未知量。
(3)结构带无限刚性梁时,即EI∞时,若柱子平行,
q4l02kN2.m0•42 84q1l 2.7kN82.m0•5
12 12
2
MBA
m 41.7kN.m CB
44mm
EE
300I..7755M图(kN.M300)I..55
1.7
55mm 4.9FF
MCB MCD
MCF 44mm
MBC M 4•0.75 3 =3.4
BE
B
B
M 3 40 =43.5 MBE
FP
B FQBA FQBC
MBC
M B 0M B A M B C 0
11iB
9i qL2 L 12
0
……①
Y 0
FQBA FQBC FP 0 ……②
求FQBA MAB A
q
FQAB
求FQBC
MBC B FQBC
MA 0
B
MBA
FQBA
M AB
M BC L
qL 2
FQBA
12i L
3 2 1
结点转角的数目:7个
独立结点线位移的数目:3个
D
E
刚架结构,有两个刚结点D、E,
故有两个角位移,结点线位移由铰
结体系来判断,W=3×4-2×6=0,
A
B
力法与位移法的比较与综合应用

力法与位移法的比较及综合应用作者:丁必成摘要力法和位移法是超静定结构力分析的两种基本方法。
本文从基本未知量、基本体系、典型方程及计算过程等方面对这两种方法进行比较和总结,介绍了力法与位移法的联合应用及混合应用。
根据结构的具体情况,综合应用力法或位移法,常能方便快捷地进行超静定结构的力分析。
关键词力法位移法基本未知量基本体系混合应用联合应用1 力法与位移法的比较1.1 基本未知量力法:是以多余未知力为基本未知量,基本未知量的数目等于结构的超静定次数。
位移法:是以独立的结点位移(结点角位移与独立结点线位移)为基本未知量,基本未知量的数目与超静定的次数无关。
例如:图1中(a)图为三次超静定结构:(b)图使用力法,基本未知量为3个(X,2X,3X)1(c)图使用位移法,基本未知量为1个(Z)11.2 基本体系力法:从原结构中去掉多余约束而代之以多余未知力所构成的静定结构作为基本体系。
位移法:在原结构各刚性结点上附加刚臂,在有独立结点线位移的方向附加链杆,形成一系列单跨超静定梁作为基本体系。
1.3 典型方程与计算过程力法和位移法的典型方程是相似的:力法:位移法:(1)上述典型方程中的1X 2X ...i X ...和1Z 2Z ...i Z ...分别代表多余未知力和结点未知位移。
方程右边为零,分别体现变形协调条件与力的平衡条件。
(2)典型方程中,在基本未知量前面都存在系数。
力法中ij δ为柔度系数,它表示第j 个单位多余未知力在i 处所引起的相应位移,当j =i 时,ij δ恒为正值,当j ≠i 时,根据位移互等定理有ji ij δδ=位移法中j i r 为刚度系数,代表由于第n 个单位位移在i 处引起的相应反力或反力偶,当j =i 时,j i r 恒为正值;当j ≠i 时,根据反力互等定理有ji ij r r =。
此外,两者的典型方程中都存在自由项ip ∆和ip R 分别代表由荷载在i 处引起位移和力或力偶。
位移法

ri 1Z1+ ···+ ri iZi+ ···+ ri nZn+Ri P=0
(6—1)
····················································
rn1Z1+ ···+ rniZi+ ···+ rnnZn+RnP=0
返回
r11Z1+ ···+ r1iZi+ ···+ r1nZn+R1P=0 ···················································· ri 1Z1+ ···+ ri iZi+ ···+ ri nZn+Ri P=0 (6—1) ····················································
返回
二、独立线位移数目的确定
在一般情况下,每个结点均可能有水平和竖向两个线位移。
但通常对受弯杆件略去其轴向变形,其弯曲变形也是微小的,于
是可以认为受弯直杆的长度变形后保持不变,故每一受弯直杆就
相当于一个约束,从而减少了结点的线位移数目,故结点只有一
个独立线位移(侧移)。例如(见图a)
△
4、5、6 三个固定 端 都是不动的 1
设以 r11、r12分别表示由单位位移 力矩, 以 r21、r22分别表示由单位位移 上的反力,则上式可写成
所引起的刚臂上的反 所引起的链杆
r11Z1+ r12Z2+R1P=0 r21Z1+ r22Z2+R2P=0
这就是求解Z1、Z2的方程,即 位移法基本方程(典型方程)。 它的物理意义是:基本结构在荷载等外因和结点位移的共同作用
力法与位移法的比较及综合应用

力法与位移法的比较及综合应用力法与位移法的比较及综合应用作者:丁必成摘要力法和位移法是超静定结构内力分析的两种基本方法。
本文从基本未知量、基本体系、典型方程及计算过程等方面对这两种方法进行比较和总结,介绍了力法与位移法的联合应用及混合应用。
根据结构的具体情况,综合应用力法或位移法,常能方便快捷地进行超静定结构的内力分析。
关键词力法 位移法 基本未知量 基本体系 混合应用 联合应用1 力法与位移法的比较1.1 基本未知量力法:是以多余未知力为基本未知量,基本未知量的数目等于结构的超静定次数。
位移法:是以独立的结点位移(结点角位移与独立结点线位移)为基本未知量,基本未知量的数目与超静定的次数无关。
例如:图1中(a)图为三次超静定结构:(b)图使用力法,基本未知量为3个(,,)(c)图使用位移法,基本未知量为1个()1.2 基本体系力法:从原结构中去掉多余约束而代之以多余未知力所构成的静定结构作为基本体系。
位移法:在原结构各刚性结点上附加刚臂,在有独立结点线位移的方向附加链杆,形成一系列单跨超静定梁作为基本体系。
1X 2X 3X 1Z1.3 典型方程与计算过程力法和位移法的典型方程是相似的:力法:位移法:(1)上述典型方程中的......和......分别代表多余未知力和结点未知位移。
方程右边为零,分别体现变形协调条件与力的平衡条件。
(2)典型方程中,在基本未知量前面都存在系数。
力法中为柔度系数,它表示第j 个单位多余未知力在i 处所引起的相应位移,当时,恒为正值,当时,根据位移互等定理有位移法中为刚度系数,代表由于第n 个单位位移在i 处引起的相应反力或反力偶,当时,恒为正值;当时,根据反力互等定理有。
此外,两者的典型方程中都存在自由项和分别代表由荷载在i 处引起位移和力或力偶。
(3)方程中系数建立后,从基本方程就可解出基本未知量。
力法和位移法的典型方程的计算过程都是先直接求出基本未知量,然后计算内力。
位移法 结构力学知识点概念讲解

位移法1.概述力法和位移法是分析超静定结构的两种基本方法。
力法在19世纪末就已经应用于各种超静定结构的分析。
随后,由于钢筋混凝土结构的出现,大量高次超静定刚架逐渐增多,如果仍用力法计算将十分麻烦。
于是20世纪初又在力法的基础上建立了位移法。
力法的基本思路是先解除超静定结构上的多余约束,代之以多余未知力,以多余未知力为基本未知量,一般取静定结构为基本结构进行计算。
利用位移协调条件建立力法基本方程,求出多余未知力,然后进一步求出结构的内力。
位移法的基本思路和力法相反。
位移法是以结构的结点位移作为基本未知量,以单跨超静定梁为计算的基本单元。
先设法确定出单根杆件的杆端内力,用杆端位移来表示,这些杆端位移应与其所在结点的其他杆端位移相协调。
然后用力的平衡条件建立位移法基本方程,确定出未知的结点位移,从而进一步求出整个结构的内力。
为了说明位移法的基本概念,我们来分析图1a所示的刚架位移。
(a)原结构(b)基本结构图1在荷载作用下,刚架产生的变形如途中虚线所示,设结点B 的转角为1∆,根据变形协调条件可知,汇交于结点B 的BA 杆、BC 杆两杆端也该有同样的转角1∆。
为了简化计算,在受弯杆件中,忽略杆件的轴向变形和剪切变形的影响,假设弯曲变形很小,因此可以假定结构变形后受弯杆件的两端之间的距离不变。
根据这些假定,B 结点就只有角位移没有线位移。
这样1b B 我们将第一步和第二步的结果叠加,得到的基本结构的变形和原结构一致。
我们注意到原结构在B 点并没有附加刚臂,也不存在约束力矩,所以可得11F +P F 1=0 (1)这里的11F 是基本结构在B 点发生转角1∆时,产生在附加刚臂中的反力矩。
用11k 来表示基本结构在B 点处发生单位转角1∆=1时,产生在附加刚臂中的反力矩,则式(1)可以写成01111=+∆P F k (2)式(2)我们称为位移法基本方程。
11k 、P F 1我们可以用上一章学习的力法确定,然后我们可求出1∆,进而求出原结构的全部内力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.位移法
位移法的思路本质上也是化未知问题为已知问题,但它的
“已知
问题
”是基于力法求解结果的单跨梁形常数和载常数。
对于具有
n个独立结点位移的刚架,相应地在基本结构中要加入
n个附加联系,根据附加联系的附加反力矩或附加反力应为零的平衡
条件,可建立
n个方程如下
(1)总次数也可由计算自由度得到;
(2)一个超静定结构可能有多种形式的基本结构,不同基本结构
带来不同的计算工作量。因此,要选取工作量较少的基本结构;
軍
軍
(3)可变体系不能作为基本结构。
軍
若超静定结构含有受弯杆件及仅受轴力的链杆而忽略受弯杆件,22
軍
的剪切变形和轴向变形,上式中所有系数和自由项可表达为
由于计算机和计算技术的飞速发展,计算机方法(computer
method)必将取代原有的人工手算方法。但是,力学基本概念任何时候
都是不可缺少的。就像只会开汽车不会走路、爬山,自然不可能攀登上
高峰。因此需要切实学好力法和位移法。
由以上分析可以看出,力法和位移法既有联系,又有区别。力法的
可举一反三,触类旁通。
位移法的做法是设法将结构变成会计算(有形、载常数)的单跨梁
集合,在自动满足位移协调条件的前提下,使荷载、结点位移共同作用
时,结构应该处于平衡状态(结点和部分隔离体都平衡)来建立位移法
方程。和力法一样,深刻理解这一基本思路,就能以不变应万变,解决
一切结构在任意外因下的计算问题。 Leabharlann 科技信息 ○建筑与工程○
SCIENCE
&
TECHNOLOGY
INFORMATION
2008年第
36期
分析超静定结构的基本方法
李强孙传忠
(山东建工集团山东济南
250014)
【摘要】本文介绍了解决超静定结构问题的两种基本方法,力法和位移法;分析了这两种方法的区别和联系。
[2]朱伯钦,周竞欧,许哲明主编
.结构力学
.上海:同济大学出版社.1994.
[3]朱慈勉主编
.结构力学
.北京:高等教育出版社.2004.
[责任编辑:韩铭]
120
ds
ds
δii
=Σ∫M+Σ∫N
iEI
iEA
軓
軓軓
軓
軓
δij
=Σ∫MiMj
EdsI
+Σ∫Ni
Nj
EdsA
(1-2)
Σ(n)
ds
ds
△iP
=Σ∫MiM+Σ∫Ni
NP
EI
EA
后,可求任一截面的最终弯矩值为
未知量是力,用位移条件建立平衡方程;位移法的未知量是位移,用力
的条件建立平衡方程。在解决超静定问题的时候,力法和位移法应灵
活运用,不要生搬硬套,使问题陷于复杂的计算中;有些时候,力法和
位移法可以相互结合使用,以使问题得以迅速方便解决。
【参考文献】
[1]李廉锟主编
.结构力学
.北京:高等教育出版社.1996.
Σ(n) 力——
结构的基本特征。
(又称刚度法)。
1.力法=
关键词超静定结构力法位移法【】;;在实际工程中大多数结构是超静定的单靠平衡条件不能确定。,全部反力和内力的结构称为超静定结构因此具有多余约束是超静定,求解超静定问题我们可以将未知问题转化为已知问题通过消,,除已知问题和原问题的差别使未知问题得以解决这是科学研究的。,基本方法之一在求解时需综合考虑三个方面的条件平衡条件力的。(:平衡几何条件位移的协调物理条件力与位移的物理关系在)、()、()。具体求解时有两种不同的基本方法即力法又称柔度法和位移法(),,力法是将超静定结构的多余约束力作为基本未知量的分析方法,当首先求出多余约束力后其它各截面的内力计算就迎刃而解了。,对于一个超静定次的结构来说具有个多余约束未知力X、nn,1相应地具有个位移条件可建立个力法方程若个约XX、…、。nnn,,2n束方向位移均已知为零则力法典型方程可表达为,δX△=0j=121-1()()+n,,…,ijjiP确定超静定次数时应注意:軍軍軍軍軍軍軍軍軍軍軍軍軍軍軍将求得系数和自由项代入力法方程解联立线性方程组之1-1(),;MM=X+M1-3()iip根据结构组成分析正确判断多于约束个数——,解除多余约束转化为静定的基本结构多余约束代以多余未知。,分析基本结构在单位基本未知力和外界因素作用下的位移建立,(p) (1) (i)
軈
i=1
rij
表示由第
j个约束发生单位位移(Zj
=1)时,在第
i个约束产生
后,可求任一截面的最终弯矩值为
M=
MiZi+Mp(2-2)
=
位移(i) 法(1) (平衡方程法)基本思路小结:
以某些结点的位移为基本未知量。
Σ(n) 将求得的系数和自由项代入方程解联立线性方程组之2-1(),;
Z+R=0j=12
科
2-1()()rn,,…,
ijjiP
●
程。
求出基本未知量后,由单跨梁力
-位移关系可得原结构受力。
3.总结
力法是解超静定结构的基本方法,力法中的基本体系既是静定结
构,又可用它来代表原来的超静定结构,因此基本体系是静定结构过
渡到超静定结构的一座桥梁。在基本体系中,一方面保留着原结构的
=
力法(i) 基(1) 本思路小结:
—超静定次数。
—基本未知力。
位移协调条件
——
—力法典型方程。
从典型方程解得基本未知力,由叠加原理获得结构内力。超静定
结构分析通过转化为静定结构获得了解决。由于从超静定转化为静
定,将什么约束看成多余约束不是唯一的,因此力法求解的基本结构
外荷载;另一方面有相应的约束力存在,只是把它由原来的被动力(约
束)改为主动力。
土木工程是由各种构件组成的几何不变体系。几何不变体系包括
静定结构和超静定结构。力法方程的实质是位移方程,之所以称其为
力法方程,是因为方程的建立是从多余力入手的。要深入理解多余力
和支座约束的关系,基本体系和原结构的等价关系,只有这样才可以
将结构拆成若干具有已知力-位移
(转角
-位移
)关系的单跨梁集
衡条件求得。Σ(n)
合。
的反力表示由于荷载作用在第个约束中产生的反力均可由平Ri;,iP
軓
分析各单跨梁在外因和结点位移共同作用下的受力。
将单跨梁拼装成整体。
用平衡条件消除整体和原结构的差别,建立和位移个数相等的方