计算机仿真实验-基于Simulink的简单电力系统仿真
毕业设计基于MATLABSIMULINK的交流电动机调速系统仿真

1 绪论1.1课题研究背景及目的研究背景直流调速系统的主要优点在于调速范围广、静差率小、稳定性好以及具有良好的动态性能;在相当长时期内,高性能的调速系统几乎都是直流调速系统;尽管如此,直流调速系统却解决不了直流电动机本身的换向和在恶劣环境下的不适应问题,同时制造大容量、高转速及高电压直流电动机也十分困难,这就限制了直流拖动系统的进一步发展;交流电动机自1985年出现后,由于没有理想的调速方案,因而长期用于恒速拖动领域;20世纪70年代后,国际上解决了交流电动机调速方案中的关键问题,使得交流调速系统得到了迅速的发展,现在交流调速系统已逐步取代大部分直流调速系统;目前,交流调速已具备了宽调速范围、高稳态精度、快动态响应、高工作效率以及可以四象限运行等优异特性,其稳、动态特性均可以与直流调速系统相媲美;与直流调速系统相比,交流调速系统具有以下特点:(1)容量大;(2)转速高且耐高压;(3)交流电动机的体积、重量、价格比同等容量的直流电动机小,且结构简单、经济可靠、惯性小;(4)交流电动机环境使用性强,坚固耐用,可以在十分恶劣的环境下使用;(5)高性能、高精度的新型交流拖动系统已达同直流拖动系统一样的性能指标;(6)交流调速系统能显著的节能;从各方面看,交流调速系统最终将取代直流调速系统;1.1.1研究目的本课题主要运用MATLAB-SIMULINK软件中的交流电机库对交流电动机调速系统进行仿真,由仿真结果图直接认识交流系统的机械特性;本文重点对三相交流调压调速系统进行仿真研究,认识PID调节器参数的改变对系统性能的影响,认识该系统动态及静态性能的优劣及适用环境;在实际应用中,电动机作为把电能转换为机械能的主要设备,一是要具有较高的机电能量转换效率;二是应能根据生产机械的工艺要求控制和调节电动机的旋转速度;电动机的调速性能如何对提高产品质量、提高劳动生产率和节省电能有着直接的决定性影响;因此,调速技术一直是研究的热点12;而交流调速系统凭着其绝对的优势,最终必将取代直流调速系统3;近几年来,科学技术的迅速发展为交流调速技术的发展创造了极为有利的技术条件和物质基础;交流电动机的调速系统不但性能同直流电动机的性能一样,而且成本和维护费用比直流电动机系统更低,可靠性更高4;目前,国外先进的工业国家生产直流传动的装置基本呈下降趋势,交流变频调速装置的生产大幅度上升;在日本,1975年在调速领域,直流占80%,交流占20%;1985年交流占80%,直流占20%5;到目前为止,日本除了个别的地方还继续采用直流电机外,几乎所有的调速系统都采用变频装置67;计算机仿真技术在交流调速系统的应用,使得对交流调速的性能分析和研究变的更为方便;传统的计算机仿真软件包用微分方程和差分方程建模,其直观性、灵活性差,编程量大,操作不便;随着一些大型的高性能的计算机仿真软件的出现,实现交流调速系统的实时仿真可以较容易地实现8;如:matlab软件已经能够在计算机中全过程地仿真交流调速系统的整个过程;matlab语言非常适合于交流调速领域内的仿真及研究,能够为某些问题的解决带来极大的方便并能显著提高工作效率;随着新型计算机仿真软件的出现,交流调速技术必将在成本控制、工作效率、实时监控等方面得到长足进步910;交流调速技术发展到今天,相对而言已经比较成熟,在工业中得到了广泛的应用,但是随着一些新的电力电子器件和一些新的控制策略的出现,工业应用对交流调速系统又提了新的要求,现代交流电机调速技术的研究和应用前景十分广阔;20世纪80年代中期研制开发出一种新型交流调速系统——开关磁阻电动机调速系统,它将新型的电机、现代电力电子技术与控制技术融为一体,形成一个典型的机电一体化的调速系统;由于它在效率、调速性能和成本方面都具有一定的优势,已成为当代电力拖动的一个热门课题,将会在调速领域占有一席之地;交流调速的控制策略近年来发展非常迅速,诸如转差矢量控制,自适应控制磁通自适应、断续电流自适应、参数自适应等模型参考自适应控制,状态观测器磁通观测器、力矩观测器等,为补偿速度降以提高精度的前馈控制,以节能、平稳、快速等为目标函数的优化控制,线性二次型积分控制,滑模变结构控制,直接转矩控制及模糊控制等已见诸国内外有关文献及杂志中论文主要工作1.分析各种调速系统在实际运用中的优缺点,分析各种调速方式适用的场合;2.重点分析掌握三相交流调压调速原理,机械特性等,然后对其进行MATLAB的仿真实现,通过修改系统各部分的参数,可以输出稳定的波形;根据示波器输出结果,对系统的性能进行分析;论文章节安排第一章绪论:主要介绍本课题的研究背景和研究内容,以及交流调速系统在国内外的发展和前景展望;介绍了文章的主要工作安排以及论文章节安排;第二章交流调速系统:比较交流调速系统的各种调速方案,重点分析了交流调压调速系统的原理及机械特性,及对交流调压调速电路以及闭环调压调速系统进行了重点的研究分析;第三章交流调压调速系统的MATLAB仿真:运用MATLAB的SIMULINK工具箱分别对异步电动机调压调速系统的主电路与控制电路进行建模和参数设置,最终建立了异步电动机调压调速系统电路的仿真模型,并对其进行了仿真分析和研究,给出仿真结果,通过对仿真结果的分析验证了交流调压电路的工作原理和所建模型的正确性;第四章结论:对全文进行总结,指明异步电动机调压调速系统的发展方向;2 交流调速系统原理与特性交流调速系统交流电机包括异步电动机和同步电动机两大类;对交流异步电动机而言,其转速为:()min /)1(60r ps f n -= 2-1 从转速公式可知改变电动机的极对数p ,改变定子供电功率f 以及改变转率s 都可达到调速的目的;对同步电动机而言,同步电动机转速为:()min /601r pf n = 2-2 由于实际使用中同步电动机的极对数p 是固定的,因此只有采用变压变频VVVF 调速,即通常说的变频调速;运用到实际中的交流调速系统主要有:变级调速系统、串级调速系统、调压调速系统、变频调速系统1;1变极调速系统:调旋转磁场同步速度的最简单办法是变极调速;通过电动机绕组的改接使电机从一种极数变到另一种极数,从而实现异步电动机的有级调速;变极调速系统所需设备简单,价格低廉,工作也比较可靠,但它是有级调速,一般为两种速度,三速以上的变极电机绕组结构复杂,应用较少;变极调速电动机的关键在于绕组设计,以最少的线圈改接和引出头以达到最好的电机技术性能指标;2串级调速系统:绕线转子异步电动机串级调速是将转差功率加以利用的一种经济、高效的调速方法;改变转差率的传统方法是在转子回路中串入不同电阻以获得不同斜率的机械特性,从而实现速度的调节;这种方法简单方便,但调速是有级的,不平滑,并且转差功率消耗在电阻发热上,效率低;自大功率电力电子器件问世后,采用在转子回路中串联晶闸管功率变换器来完成馈送转差功率的任务,这就构成了由绕线异步电动机与晶闸管变换器共同组成的晶闸管串级调速系统;转子回路中引入附加电势不但可以改变转子回路的有功功率——转差功率的大小,而且还可以调节转子电流的无功分量,即调节异步电动机的功率因数;3调压调速系统:异步电动机电机转矩与输入电压基波的平方成正比,所以改变电机端电压基波可以改变异步电动机的机械特性以及它和负载特性的交点,来实现调速;异步电动机调压调速是一种比较简单的调速方法;在20世纪50年代以前一般采用串饱和电抗器来进行调速;近年来随着电力电子技术的发展,多采用双向晶闸管来实现交流调压;用双向晶闸管调压的方法有两种:一是相控技术,二是斩波调压;采用斩波控制方法可能调速不够平滑,所以在异步电机的调压控制中多用相控技术;但是采用相控技术在输出电压波形中含有较大的谐波,会引起附加损耗,产生转矩脉动15;4变频调速系统:在各种异步电机调速系统中,效率最高、性能最好的系统是变压变频调速系统;变压变频调速系统在调速时,须同时调节定子电源的电压和频率,在这种情况下,机械特性基本上平行移动,转差功率不变,它是当前交流调速的主要方向16;调压调速系统的优点是线路简单,价格便宜,使用维修方便,本文主要针对交流调压调速系统进行MATLAB仿真;下面对交流调压调速系统的原理及机械特性进行介绍;交流异步电动机调压调速系统三相交流调压电路交流调压调速需要三相交流调压电路,晶闸管三相交流调压电路的接线方式很多,工业上常用的是三相全波星形连接的调压电路;如图所示;这种电路的接法特点是负载输出谐波分量低,适用于低电压大电流的场合11;图三相全波星形连接的调压电路要使得该电路正常工作,必须满足下列条件:1在三相电路中至少有一相的正向晶闸管与另一相得反相晶闸管同时导通;2要求采用脉冲或者窄脉冲触发电路;3为了保证输出电压三相对称并且有一定的调节范围,要求晶闸管的触发信号除了必须与相应的交流电源有一致的相序外,各个触发信号之间还必须严格的保持一定的相位关系;即要求U、V、W三相电路中正向晶闸管即在交流电源为正半周时工作的晶闸管的触发信号相位互差120°,三相电路中的反向晶闸管的触发信号相位互差120°;在同一相中反并联的两个正、反向晶闸管的触发脉冲相位应互差180°;由上面结论,可得三相调压电路中各晶闸管触发的次序为VT 1、VT 2、VT 3、VT 4、VT 5、VT 6、VT 1以此类推;相邻两个晶闸管的触发信号相位差60°;在晶闸管交流调压中,晶闸管可借助于负载电流过零而自行关断,不需要另加换流装置,故线路简单、调试容易、维修方便、成本低廉,从而得到广泛的应用;调压调速原理根据异步电动机的机械特性方程式()()[]2'21212'211'221'22'211//33l l M L L s R R s R pU s R I P P T +++==Ω=ωωω 2-3其中 p ——电动机的极对数1U 、1ω——电动机定子相电压和供电角频率s ——转差率1R 、'2R ——定子每相电阻和折算到定子侧的转子每相电阻11L 、'12L ——定子每漏感和折算到定子侧的转子每相漏感可见,当转差率s 一定时,电磁转矩T 与定子电压1U 的平方成正比;改变定子电压可得到一组不同的人为机械特性,如图所示;在带恒转矩负载L T 时,可以得到不同的稳定转速,如图中的A,B,C 点,其调速范围较小,而带风机泵类负载时,可得到较大的调速范围,如图中的D,E,F 点;S S L m图 异步电动机在不同定子电压时的机械特性所谓调压调速,就是通过改变定子外加电压来改变电磁转矩T ,可得到较大的调速范围,从而在一定的输出转矩下达到改变电动机转速的目的13;为了能在恒转矩负载下扩大调压调速范围,使电机在较低速下稳定运行又不致过热,可采用电动机转子绕组有较高电阻值时的机械特性;在恒转矩负载下的交流力矩电动机的机械特性;图显示此类电动机的调速范围增大了,而且在堵转转矩下工作也不致烧毁电;动机14图交流力矩电机在不同定子电压时的机械特性闭环控制的调压调速系统系统的组成及其静特性异步电动机调压调速时,采用普通电机的调速范围很窄;并且在低速运行时候稳定性很差,在电网电压、负载有扰动时候会引起较大的转速变化;解决这些矛盾的根本方法是采用带转速负反馈的闭环控制,以达到自动调节转速的目的;在调速要求不高的情况下,也可采用定子电压负反馈闭环控制;图a是带转速负反馈的闭环调压调速系统原理图,图b是相应的调速系统静特性;如T在A点稳定运行,当负载增大导致转速下降时,通过转速反馈控制作用提果系统带负载L高定子电压,使得转速恢复,即在新的一条机械特性上找到了工作点A';同理,当负载减小使得转速升高时,也可以得到新的工作点A'';将工作点A''、A、A'连起来就是闭环系统的静特性1;M3a 原理图L e min 1Ub 静特性图 转速负反馈闭环控制的交流调压调速系统在额定电压N U 1下的机械特性和最小电压min 1U 下的机械特性是闭环系统静特性左右两边的极限,当负载变化达到两侧的极限时,闭环系统便失去控制能力,回到开环机械特性上工作14;对图a所示的系统,可画出系统静态结构图,见图所示:ASRL T -图 异步电动机调压调速系统的静态结构图图中:ctS U U K 1=----晶闸管交流调压器VVC 和触发装置GT 的放大系数; ct U ----触发装置的控制电压;n U n /=α----为转速反馈系数;n U ----测速发电机TG 输出的反馈电压;转速调节器ASR 采用PI 调节器;()T U f n ,1=是由式2-3描述的异步电动机械特性方程,它是一个非线性函数;近似的动态结构图异步电动机调压调速的近似动态结构图如下所示:U 图 异步电动机调压调速系统的近似动态结构图图中各环节的传递函数为:1 转速调节器ASR常用PI 调节器消除静差并改善动特性,其传递函数为:()ST S T K S W n n n ASR 1+= 2-4 2 晶闸管交流调压器和触发装置GT-V假定该环节输入输出关系是线性的,在动态中可近似为一阶惯性环节,其近似条件与晶闸管触发与整流装置一样;本环节传递函数可表示为:()1+=-TsS K S W S V GT 2-5 3 测速反馈环节FBS考虑到反馈滤波的作用, 传递函数为:()1+=S T S W on FBS α2-64 异步电动机MA由于描述异步电动机动态过程是一组非线性微分方程,只用一个传递函数来准确的表示异步电动机在整个调速范围内的输入输出关系式不可能的;只有做出一定的假设,并用稳态工作点附近微偏线性化的方法才能得到近似的传递函数;3 交流调压调速系统的MATLAB仿真系统的建模和模型参数设置主电路的建模和参数设置主电路主要由三相对称交流电压源、晶闸管、晶闸管三相交流调压器、交流异步电动机、电机信号分配器等部分组成;下面分别讨论三相交流电源、三相交流调压器、同步脉冲触发器、交流异步电动机、电机测试信号分配器的建模和参数设置问题16;三相交流电源的建模和参数设置首先从图中的电源模块组中选取一个交流电压源模块,再用复制的方法得到三相电源的另两个电压源模块,并把模块名称分别修改成A相、B相、C相;然后从图中的链接器模块组中选取“ground”元件也复制成三份,按图所示连接即可图Simulink中的电源模块图Simulink中的连接模块图三相交流电源的模型为了得到三相对称交流电压源,对其参数设置:双击A相交流电压源图标打开参数设置对话框,A相得参数设置分别是:幅值peak amplitude取220V、初相位Phase设置成 0、频率Frequency设置为50HZ,其他为默认值;B、C的参数设置方法与A相相同,除了将初相位设置成互差120以外,其它参数都与A相相同;由此可得到三相对称交流电源4;3.1.1.2晶闸管三相交流调压器的建模与参数设置晶闸管三相交流调压器通常是采用三对反并联的晶闸管元件组成,单个晶闸管元件采用“相位控制”方式,利用电网自然换流;图中所示为晶闸管三相交流调压器的仿真模型;图晶闸管三相交流调压器仿真模型子系统触发脉冲的顺序为V1-V2-V3-V4-V5-V6,其中V1-V3-V5之间和V4-V6-V2之间互差120度,V1-V4之间、V3-V6之间、V5-V2之间互差180度;双击晶闸管对话框得到晶闸管参数设置图,根据图中要求及系统要求对其进行参数设置如下:电阻Resistance Ron:40 Ω;电感Inductance Lon:0H;正向电压Forward voltage Vf:;初始电流Initial current Ic:0A;缓冲器电阻Subber resistance Rs:1200Ω;μ;缓冲器电容Subber capacitance Cs:250 F上图是用单个晶闸管元件按三相交流调压器的接线要求搭建成仿真模型的,单个晶闸管的参数设置仍然遵循晶闸管整流桥的参数设置原则,具体如下:如果针对某个具体的变流装置进行参数设置,对话框中的参数应取默认值进行仿真,若仿真结果理想,就可认可这些设置的参数,若仿真结果不理想,则通过仿真实验,不断进行参数优化,最后确定其参数;这一参数设置原则对其它环节的参数设置也是适用的18;在使用Simulink进行系统仿真分析时,首先需要进行模块参数设置,因此需要对系统中所有模块进行正确的参数设置;如果逐一的对各个系统进行参数设置时很繁琐的,因为子系统一般均为具有一定功能的模块组的集合,在系统中相当于一个单独的模块,具有特定的输入和输出关系;对于已经设计好的子系统而言,能够像Simulink模块库中的模块一样进行参数设置,则会给用户带来很大的方便,这时用户只需要对子系统参数选项中的参数进行设置,无需关心子系统的内部模块的实现;具体封装步骤如下:选择需要封装的子系统Subsystem,然后单击鼠标右键,在弹出的菜单中选择Mask Subsystem项,或者单击Edit-Mask Subsystem项19;这时将出现图中所示的封装编辑器;使用封装编辑器子系统中的图标、参数初始化设置对话框以及帮助文档,从而可使使用户设计出非常友好的模块界面,以充分发挥Simulink的强大功能;打开Mask editor:Subsystem对话框,如图所示;使用此编辑器可以对封装后的子系统进行各种编辑;在默认情况下,封装子系统不使用图标;但友好的子系统图标可使子系统的功能一目了然;为了增强封装子系统的界面友好性,用户可以自定义子系统模块的图标;只需在途中编辑对话框中的“图标和端口”选项卡中“绘制命令”栏中使用MATLAB 中相应便可以绘制模块图标,并可设置不同的参数控制图标界面的显示20;图 子系统封装编辑器下图为晶闸管三相交流调压器子系统封装图如下所示:aU bU cU a bcP图 三相交流调压器子系统封装图图中,Ua,Ub,Uc 分别连接三相交流电源的三相,P 连接从脉冲触发器出来的触发脉冲,输出a,b,c 分别连接交流电动机的A,B,C 输入4;同步脉冲触发器的建模和参数设置通常,工程上将触发器和晶闸管整流桥作为一个整体来研究,所以,在此处讨论同步脉冲触发器;同步脉冲触发器包括同步电源和6脉冲触发器两部分;6脉冲触发器可以从图所示的附加模块Extras Control Blocks 子模块组获得;图附加模块Extras Control Blocks子模块6脉冲触发器需要三相线电压同步,所以同步电源的任务是将三相交流电源的相电压转换成线电压;同步电源与6脉冲触发器符号图如下所示4:图同步脉冲触发器子系统同步脉冲触发器封装后子系统符合如下:UaUbUcOutIn2Uct图同步脉冲触发器封装后子系统符号然后根据主电路的连接关系,建立起主电路的仿真模型;图中ln2为脉冲器开关信号,当脉冲器开关信号为“0”时,开放触发器;为“1”时,封锁触发器4;交流异步电动机的建模和参数设置在Power System 工具箱中有一个电机模块库,它包含了直流电机、异步电机、同步电机以及其他各种电机模块;其中,模块库中有两个异步电动机模型,一个是标幺值单位制PI unit 下的异步电动机模型,另一个是国际单位制SI unit 下的异步电动机模型,本设计中采用后者;国际单位制下的异步电动机模型符号如图所示2:图 异步电动机模块其电气连接和功能分别为:A,B,C :交流电机的定子电压输入端子;m T :电机负载输入端子,一般是加到电机轴上的机械负载;a,b,c:绕线式转子输出电压端子,一般短接,而在鼠笼式电机为此输出端子;m:电机信号输出端子,一般接电机测试信号分配器观测电机内部信号,或引出反馈信号2;异步电动机模型参数设置如下;双击异步电动机的模型,即了得到参数设置对话框;分别对其进行参数设置如下所示6:1绕组类型Rotor type: 转子类型列表框,分别可以将电机设置为绕线式Wound 和鼠笼式Squirrel -cage 两种类型;在本文中用鼠笼式Squirrel -cage 异步电动机;2参考坐标系Reference Frame :参考坐标列表框,可以选择转子坐标系Rotor 、静止坐标系Stationary 、同步旋转坐标系Synchronous;在本文中选择同步旋转坐标系Synchronous ; 3额定参数: 额定功率n P KW 取30KW,线电压n V V 为380V ,频率f 赫兹为50HZ ; 4定子电阻s R Statorohm 取Ω和漏感ls L H 取为;5转子电阻r R Rotorohm 为Ω和漏感lr L H 取为;其它设置为默认值电动机测试信号分配器的建模和参数设置电动机测试信号分配器模块的模型图如下所示:图Machines Measurement Demux电动机测试信号分配器模块双击电动机测试信号分配模块得图电机测试信号分配器参数设置图;图电动机测试信号分配器参数设置对话框及参数选择图中:ir_abc:转子电流ira,irb,irc;ir_qd:同步d-q坐标下的q轴下的转子电流ir_q和d轴下的转子电流ir_d;phir_qd:同步d-q坐标下的q轴下的转子磁通phir_q和d轴下的转子磁通phir_d;vr_qd:同步d-q坐标下的q轴下的转子电压vr_q和d轴下的转子电压vr_d;is_abc:定子电流isa,isb,isc;is_qd:同步d-q坐标下的q轴下的定子电流is_q和d轴下的定子电流is_d;phir_qd:同步d-q坐标下的q轴下的定子磁通phis_q和d轴下的定子磁通phis_d;vs_qd:同步d-q坐标下的q轴下的定子电压vs_q和d轴下的定子电压vs_d;wm :电机的转速wm ;Te :电机的机械转矩Te ;Thetam :电机转子角位移Thetam 1;控制电路的建模和参数设置交流调压系统的控制电路包括:给定环节、速度调节器、限幅器、速度反馈环节等;控制电路的有关参数设置如下:速度反馈系数设为20;调节器的参数设置分别是:ASR :30=pn K ;300=n τ;上下限幅为400-0;其它没做说明的为系统默认参数;给定环节的建模与参数设置在调压调速的仿真模型中有几个给定环节,它可以从图中的输入源模块组中选取“constant ”模块,模块路径为Simulink/Commonly Used Blocks 14;图 输入源模块组然后双击该模块的图标,打开参数设置对话框,在该系统中用到两个给定模块,分别将给定值Constent value 设置为-20以及0两个;其它设置为默认值;实际调速时,给定信号是在一定的范围内变化的,我们可以通过仿真实践,确定给定信号允许的变化范围4;速度调节器的建模和参数设置速度调节器通常采用PI 控制,比例和积分参数的设置要根据系统的仿真结果不断地变化改动,以得到最稳定的输出特性以及动态特性;限幅器、速度反馈环节也一样;具体方法是分别设置这些参数的一个较大和较小的值进行仿真,弄清它们对系统性能影响的趋。
MATLAB-SIMULINK在电力系统工程仿真中的应用

MATLAB-SIMULINK在电力系统工程仿真中的应用MATLAB/SIMULINK在电力系统工程仿真中的应用随着电力系统的规模日益庞大和复杂性的增加,为确保电力系统的安全可靠运行,电力系统工程仿真成为了工程设计和运维过程中的重要环节。
MATLAB/SIMULINK作为一种强大的仿真工具,可以有效地模拟电力系统的各种电路、设备与系统,为电力系统工程提供精确的仿真分析与设计。
电力系统工程仿真是一种通过计算机模拟的方法,用以预测和分析电力系统的运行状况和特性。
在传统的电力系统工程中,工程师们常常使用基于经验公式和简化模型的手工计算方法进行设计和评估。
然而,由于电力系统的复杂性和不确定性,采用手工计算方法不仅效率低下,而且容易出现误差。
相比之下,MATLAB/SIMULINK具有更高的仿真精度和灵活性,能够更准确地模拟电力系统的各个方面。
首先,MATLAB/SIMULINK可以用来模拟电力系统的电路和设备。
在电力系统中,包括变压器、发电机、电动机等各种电器设备都是电路连接的要素。
MATLAB/SIMULINK提供了丰富的电路模型和元件库,可以很方便地构建各种电路模型。
例如,我们可以根据电路拓扑结构和参数数据构建一个发电机的模型,通过输入不同的工作条件和控制信号,可以模拟发电机在各种负载情况下的工作状态。
其次,MATLAB/SIMULINK还可以用来模拟电力系统的控制策略。
在电力系统中,各种控制策略被用来保持电力系统的稳定运行。
例如,电力系统中常用的电压控制和频率控制都是通过调节发电机和变压器的控制信号来实现的。
在MATLAB/SIMULINK中,我们可以根据电力系统的实际控制策略,构建相应的控制模型,通过输入系统的状态量和反馈信号,并根据设计的控制逻辑进行仿真分析。
这使得工程师们可以在设计阶段对控制策略进行优化,以提高电力系统的稳定性和鲁棒性。
此外,MATLAB/SIMULINK还可以用于电力系统的故障分析和可靠性评估。
哈工大 计算机仿真技术实验报告 实验六 基于Simulink的简单电力系统仿真
实验六 基于Simulink 的简单电力系统仿真(一:实验目的(1)掌握Simulink 的工作环境及SimPowerSystems 功能模块库的应用; (2)掌握Simulink 的电力电子电路建模和仿真方法; (3)掌握Simulink 下数学模型的仿真方法;(4)掌握升压、降压斩波电路(Buck Chopper )的工作原理及其工作特点; (5)掌握PID 控制对系统输出特性的影响。
二、实验原理通过降压斩波电路,电压发生降低,再通过桥式整流器将输入信号变为直流信号,再经过BWM 模块的作用,使输出波形变为三角波信号。
三:实验内容Buck 降压型电路原理图如图6-1所示。
图中,功率管VT 为MOSFET 开关调整组件,其导通与关断由控制脉冲决定;二极管VD 为续流二极管,开关管截止时可保持输出电流连续。
ref V 为输出电压给定参考量;L R 为负载电阻。
系统基本参数为:电源电压)314sin(100)(t t e =;变压器BT 为理想变压器,其变比为1:2=n ;PWM 频率为Hz f PWM 2000=;误差放大器放大倍数为1000=V K ;电阻Ω01.0C R ;整流滤波电容F C μ1000=,PWM 滤波电容F C o μ10=、电感H L 05.0=;负载电阻Ω=10L R 。
系统基本参数见表6.1。
分析Buck 变换器的工作特性。
表6.1 系统基本参数C R(Ω)C (F μ)o C(F μ)L(H)L R(Ω)V KnPWMf(Hz )0.01 100010 0.05 10 10002:12000K误差放大器比较器refV 锯齿波+-inu Di ini si 1:2LR oC LC R C)(t e 图6.1 Buck 变换器电路图o u VTBTVD+-ou Li +-L u四:实验仿真结果及分析五、实验总结利用simulink进行电子电路系统的仿真,形象直观。
一般步骤为:1、做出电路图,明确问题中所给出的各物理量及其相应的初值问题。
simulink的电力系统仿真实验原理

simulink的电力系统仿真实验原理电力系统仿真实验原理:电力系统仿真实验是利用Simulink软件对电力系统进行建模、仿真和分析的过程。
该实验主要包括如下几个步骤:1. 建立电力系统模型:在Simulink环境中,根据实际电力系统的结构和特性,利用各种电力元件如发电机、变压器、传输线路、负荷等构建电力系统模型。
可以根据具体需要设置不同的电路参数和拓扑结构,以便对各种电力系统问题进行仿真分析。
2. 设定仿真参数:根据实验要求,设定仿真的时域范围、仿真步长以及模型的输入和输出要求。
例如,可以设定仿真时间为几百毫秒或几秒钟,仿真步长为毫秒级别,以获取系统各个节点的电压、电流等参数。
3. 添加模型控制器:根据需要,可以在模型中添加各种控制器如PID控制器、调速器等,以实现对电力系统的调节和控制。
控制器的参数可以根据实验要求进行设定和调整,以达到理想的控制效果。
4. 进行仿真实验:单击Simulink软件中的"运行"按钮,系统便开始进行仿真计算。
Simulink根据所设定的仿真参数和模型的输入,采用数值计算方法对电力系统进行仿真计算,并输出各个节点的电压、电流等参数。
仿真的过程也可以通过实时仿真功能进行可视化展示。
5. 分析仿真结果:根据仿真结果,可以对电力系统的运行情况进行分析和评估。
例如,可以分析系统的稳定性、安全性、损耗情况等。
如果仿真结果与实际情况存在差异,可以进一步调整电力系统模型和仿真参数,以提高仿真的准确性。
通过Simulink软件的电力系统仿真实验,可以有效地分析和解决实际电力系统中的问题。
同时,仿真实验也为电力系统的运行和优化提供了可靠的依据,减少了实验成本和风险。
计算机仿真实验5 基于Simulink三相电路仿真

实验5 基于Simulink三相电路仿真5.1实验目的1)掌握Simulink的工作环境及SimPowerSystems功能模块库的应用;2)掌握Simulink的电路系统建模和仿真方法;3)掌握Simulink仿真数据的输入与输出方法;4)掌握三相电源及负载的连接方式,了解三相负载不同连接方式对线路电压、电流和负载功率的影响;5)了解不对称负载作星形连接时对中点电压的影响;5.2实验内容与要求5.2.1 实验内容三相工频电路如图 5.1所示。
三相工频电源为对称三相电源,其中。
为线路电阻。
三相负载为对称三相负载,其中,。
三相开关在时间时刻合闸。
在有中线和无中线条件下,分析电路在负载对称和不对称工作状态下的线(相)电压、线(相)电流、中线电压和电流以及负载有功功率与无功功率,并给出其瞬时值曲线及电路稳态时负载相电压和电流的幅值和相角值。
图5.1 三相对称电路5.2.2 实验要求1)利用Simulink系统建模与系统仿真的方法,完成系统仿真分析实验;2)利用simulink库和SimPowerSystems库中的元件模型建立三相电路的有功功率、无功功率、电压与电流的幅值与相角及瞬时功率测量系统。
对组建的测量系统进行封装,建立其子系统;3)仿真输出结果若为时间曲线,则利用Scope模块显示结果。
仿真输出结果若为数值,则利用Display模块显示结果。
测量数据的传递,利用From与Goto 模块完成;4)将三相电路的相同物理量(如电压)显示在同一坐标系中,并在Scopy显示界面中标注显示的物理量名称及符号。
5.3实验原理与方法5.3.1系统的仿真电路图5.3.2实验仿真曲线参数设置如下:,,,○1三相电路的电压○2有功功率和无功功率○3电流曲线5.4实验结果分析。
基于Simulink的电动机驱动系统仿真

电力驱动系统的动态过程,指在控制信号的作用下,系统从初始状态(转速n=0)到达稳定状态(电磁转矩T cm =负载转矩T L )的响应过程。
在该过程中,动态曲线是否收敛、动态性能指标(上升时间t r 、峰值时间t p 、调节时间t s 、超调量σ等)能否满足要求,都直接关系到系统能否迅速平稳地过渡到稳态。
然而,由于系统本身结构的原因,往往存在动态过程振荡厉害、调节时间过长以及依靠参数调整无法稳定的系统(特征方程缺项)。
例如,电机在直接启动环节,电枢电流过大[1],若调节时间t s 太长,机组将面临被烧毁的危险。
因此,改善系统的动态性能至关重要。
将PI 控制器应用于电力拖动系统,并对其动态过程仿真,有助于了解动态环节的相关参数,并实施调节,改善电机的动态性能。
1PI 控制器电驱拖动系统Simulink 模型的构建电力驱动系统,一般由控制设备、电动机、传动机构、生产机械和电源等部件构成。
其相互关系如图1所示。
基于电力驱动系统的结构,采用系统最严峻的工作状态-阶跃输入为典型输入信号。
假设初始状态,电机转速为0,其数学描述定义为:r (t )=0,t <0A ,t ≥0嗓(1)拉普拉斯变换式为:L[A ·1(t )]=AS(2)式中,A 为阶跃函数的阶跃值。
引入PI 控制器环节as+10.85s ,即在系统中加入比例-积分环节(Proportional Integral controller )。
其主要原理[2]是:补全不稳定系统的前向通道的缺项,使其首先成为一个稳定系统。
然后在此基础上,通过系数的调节,达到改善指标,减少误差的目的。
在Simulink 模块[3]构建系统结构图,电力驱动系统结构模型如图2所示。
2电机驱动控制系统的仿真2.1直接控制仿真电机驱动控制系统的直接仿真,即采用PI 控制器的默认参数a=0.17(通常系数取一个较小值)直接在Simulink 里面进行迭代计算。
其仿真结果属未改进系统性能前的直接控制效果,动态性能计算如图3所示。
基于Simulink的电力系统仿真研究
基于Simulink的电力系统仿真研究【摘要】本文阐述了电力系统稳定运行的重要意义,建立了系统的simulink模型,通过迭代计算,得到了系统的动态性能的仿真结果,为系统的合理化设计奠定了理论基础。
【关键词】电力系统;simulink模型;仿真电力系统是由发电、变电、输电、配电和用电等环节组成的电能生产、传输、分配和消费的系统[1]。
为实现这些功能,在系统的各个环节都设置了相应的自动控制元件。
因此,系统本身的结构是非常复杂的。
这样的特性也同时决定了其检修和维护是非常繁琐的。
所以,要保障整个系统的长期稳定运行,必须首先从设计入手,保证其性能的优越。
而该阶段对系统进行仿真计算,能够及时地了解系统的性能,并对参数进行相应调整,以期望达到一种良好的性能状态。
鉴此,本文以一个简单的电路系统为例,建立simulink数学模型,再进行迭代计算。
最终,得到了它的性能动态性能曲线,为系统的合理化设计提供了理论依据。
1 电路系统分析本文以一个电路系统为例,进行仿真计算。
而在模型构建之前,首先必须明确需要对系统进行的是哪一个阶段的仿真,更具电力系统控制的阶段性,分为动态过程和稳态过程。
而系统最容易出现动荡和故障的阶段,是动态过程,因此,对系统的仿真,也是只需要针对这一个部分进行。
其次,必须对组成系统的元件(如给定元件、信号元件、反馈元件等)进行分析,了解它们之间信号传递的关系,以及各个元件的拉普拉斯变换式(或是微分方程、传递函数)。
在该系统中,主要包含的部分元件有:(1)电源,系统的线电压为380v,频率为50hz;(2)电源的等值阻抗;(3)线路,线路采用π形集中参数;(4)串联电容器;(5)并联电抗器。
2 电路系统simulink模型的构建根据上述章节的系统元件分析,在该电路系统的simulink模型构建过程中,主要分为3个步骤进行:(1)典型环节的确定[2]。
该步骤的具体操作,针对系统的被控对象、给定元件、典型输入信号(如阶跃信号、斜坡信号、正弦信号等)、系统性质(开环控制系统、闭环控制系统)等特点,分别在simulink当中的sources、math operations、continuous等模块选择函数,定时器,运算符等,将其拖入simulink的运行模块。
simulink 电力系统仿真教材
simulink 电力系统仿真教材Simulink是一种基于MATLAB的仿真环境,可用于电力系统的建模和仿真。
它提供了电力系统各个组件的建模模块,以及连接这些模块的连线,使得用户可以通过简单的拖拽和连接来建立一个完整的电力系统仿真模型。
在Simulink中,用户可以设置各个组件的参数,并对整个系统进行仿真和分析。
电力系统仿真可以帮助工程师们更好地理解和研究电力系统的运行和性能。
通过仿真,我们可以模拟各种工况下的电力系统运行情况,从而评估系统的稳定性、可靠性和安全性。
同时,仿真还能够辅助设计和优化电力系统,帮助我们更好地理解系统的动态行为和特性。
一本优秀的电力系统仿真教材应该包括以下内容:1.电力系统基础知识:教材应该首先介绍电力系统的基本概念和原理,包括电力系统的组成、拓扑结构和运行原理等。
这部分内容可以通过简单的文字和图表来阐述,以帮助读者理解电力系统的基本工作原理。
2. Simulink基础知识:由于Simulink是电力系统仿真的主要工具,教材还应该介绍Simulink的基本知识,包括如何安装和使用Simulink软件,以及Simulink的基本操作和组件库等。
教材可以通过简单的实例来演示Simulink的基本功能和特点。
3.电力系统建模和仿真:教材应该详细介绍如何在Simulink中建立电力系统的仿真模型,包括电网传输线、发电机、变压器、负载等各个组件的建模方法和参数设置。
教材可以通过具体的案例来演示建模的过程,以帮助读者理解如何将实际的电力系统转化为Simulink模型。
4.仿真结果分析:教材应该指导读者如何对仿真结果进行分析和评估,包括系统的稳定性、功率流分布、电压稳定性等方面的分析。
教材可以介绍一些常用的分析工具和方法,并通过具体的案例来演示分析的过程。
5.实际应用和案例:教材应该提供一些实际的电力系统案例,以帮助读者将仿真结果应用于实际工程中。
这些案例可以包括电力系统的稳态和暂态分析、电力系统的稳定控制和调度等方面的应用。
基于MATLABSimulink的电力系统仿真实验
基于MATLAB/Simulink的电力系统故障分析10kv系统三相短路分析三相短路(以中性点不接地系统模型为类)模块搭建:三相短路各元件参数设置如下:三相短路仿真波形如下:如图1——a、b、c三相短路电流仿真波形图分析:正常运行时,a、b、c三相大小相等,相位相差120度。
发生三相短路时,a、b、c三相电压全如图2——线路1的零序电流分析:在没有故障时,没有零序电流,突然出现故障时,零序电流为故障电流的3倍,为3I。
如图3——线路1的零序电压分析:在没有故障时,没有零序电压,突然出现故障时,零。
序电流为故障电压的3倍,为3U如图4——线路1的故障相电压如图5——线路3的零序电流如图6——线路3的短路电流如图7——三相对称电源电压如图8——线路2的零序电流分析:在没有故障时,没有零序电流,突然出现故障时,零序电流为故障电流的3倍,为3I0。
如图9——三相对称电源电流如图10——三相对称电源零序电压如图11——一相短路电流10kv系统两相短路分析仿真模块搭建同三相短路,只有三相故障模块参数改变如下:注:a、b两相短路分析:两相短路原理同三相短路,两相短路复合序网图是无零序并联网,短路两相电压相等,电流互为相反数,非故障相电流为零。
零点漂移轨迹的验证一理论分析对于以下简单的中性点不接地系统,当其发生单相接地故障时,各量之间满足以下关系:其中,分别表示A、B、C三相对O’点的导纳则用复数形式可表示为其相量关系如下图:则可得所以,可以推出中性点不接地系统发生单相接地故障后,不同接地电阻下,对应的零点漂移轨迹为接地相右半圆.二matalab仿真模型搭建类似单相短路电源参数设置消弧线圈参数设置其它参数设置类似单相接地短路短路,但是接下来不知该怎么把它的参数通过图形描述出来,以此证明中性点不接地系统发生单相接地故障后,不同接地电阻下,对应的零点漂移轨迹为接地相右半圆.如下图:。
(完整word版)基于MATLABSimulink的电力系统仿真实验
基于MATLAB/Simulink 的电力系统故障分析10kv 系统三相短路分析三相短路(以中性点不接地系统模型为类)模块搭建:三相短路各元件参数设置如下:g BlOCk Parameters: Th「ee・P hase SoUrCeThree-Phase SOllrCe (nask} ζlink;7hrGG-phas≡ VOItaZG SoUrCG in SGrieK With RL bxanch.Par>∑n ∙t ∙rsPhase—tO-PhaSG τ≡s volta≡G (V):110. 5e3Phase anrl⅛ Gf chase A (degreGs):lθFrtQutncy (HX):InternaI Conn.action: ∣ Y厂SPeCifr iaped&nce USXnS Sh^Xt V CirCUit IeVeISoUree resistance (Oh=Si:I O. 009SoUrCe inductance (H):116. 58e-5APPIr JOK Cancel Helpt∣∣ BlOCk Parameters; Linel-Three-Phase PZ SeCtion Lin已□a5⅛) (Iink)ThiB block inpleaents a thr«t-phi.i∙ PI section lin∙ to XePreS∙nt a thiGG-phasG transaision line. Thig block iGDresents OnIy OnG Pl section. TO Inplenenteyou si□Dlr need to CanneCt COPiea Qf this block in2>ore that One PI secti∙onjsexies・ParaaQtQTS ---------------------------------------------------------------------FreQUenCy Ueecl for RLC specification (Hz):F5PoIitiVe- Ind z⅜ro-seau⅜nce resiβtances (Ohas/ka) [ K: RO ]:I [ 0.01273 O. 3SG4:Positive* and Zero e SGauenc© inductances ⅛∙,lαι) [ LI LO ]:IT O. 9327e-3 4. 1264e-3]PCSitiV⅛- and ∑4ro∙-ssau4nee ca-pacitanees (FJka;IeICOI :I [12. 74e-9 7. 751e-9ΓLine SeetiOn IGnSth (ka√ :1130OK CanCeI KeIP Apply■OK CanCaI I EelD 厂 删 FUnCtiOn BIOCk Parameters; AddlCu s Acld c ∙r subtract XnPUtS- S^CIfT Cne Oi the fol.ovιng:a. string COntaining ∙ or - for each InPLt port, for SPaCer tetτem PortS (e. c.—・Db) SCaIar >≡ 】・ A value > 1 SUal all inputs: 1 SUnI ∙lts ⅜nts Of a tingle InPLt v ,∙ctorMain ∣ SifnftI data typaκICOn sha□e: ∣ re:t&ngulax▼]LISt Of KXeni:I 4**SaSDle t-n≡ βl for IEherXted):∣∙χ X I Cancel I HeID I Appl ∙BJ c5s3βN∕MUItimeterlHdPAaIbb Q ∖te ∂⅛ufementsU ∆Λ r βbr. LCAd3 LO a ∙133 Uan: TTbri VCΛ Lc&d3i U H : Ub Tht*∙Pb ⅛m F ⅛JlCl/fault. B» α>: IhrCQ-Pbazc fαulτl∕iαu^r C_l Cb- IHLeC ?hase Γa^lvl∕FAulV AI AT. Lo AdiIbU Lcαd3ICn GOad3lb: Ib"Q ∙7hα" I>αultl/fault Blb: Ih^ec _?hasc F aulVl∕Γau2V CUC lb: IhtraA ・7乃a=a FArJItI/FAult A—Σ-J Cown IR«rf)ve*f -IUPMe ⅝⅛∣ SOUrCe BIQCk Parameters; FromF∑o□Keceive SiEnaIC frσ≡ the GOtO block Irith the SDeClfiGd :as ・ If the tae is definedas r scoped , in the GOtO block, then a GOtO TaE ViSlbility bl ∙ock aust te used to definethe VieibiIity Of tht tac ・ After : UPdat ∙ DiaCraa I the block icon displays theSeleCted tag nase >Local taes are encIOSed in brackets. .], and SeODed tag na=es areSneIOSed in braees ; J).L ΦQ 43 Lθft<13 ≥p∣e 匚IEd MeaSU Ξ小 PIOt SdAe ⅛<igpαg Ie wI PiCX制SOUrCe BlOCk Parameters; FrOm4 「町〕一Fro□----------------------------R<c∙iv∙ SdKnalS froa the Goto bl>ck With the specified tar- If tht tae is d<ιfi∏4dseoped, in the Go∙tc Mcelt then a GOtO 7ar Vigibility blσek ≡ust be USGCl to definethe block icon displays the the Vigibility Of the tag. After , Update DiaeraID JISeIeCted tag nazιe (IOCaI tags are enclosed in brackets. and SCQPed tag nazes axeenclose! in braces::}〉・OK Cancel I Help FUnCtiOn BlOCk Parameters: DiSCrete 3・PhaSe SeqUeflCe AnalyZer三相短路仿真波形如下:如图1——a、b、c 三相短路电流仿真波形图分析:正常运行时,a、b、c 三相大小相等,相位相差120 度。
simulink 电力系统仿真教材
simulink 电力系统仿真教材简介:Simulink是一种软件工程仿真环境,具有图形化可视化建模工具。
它经常用于电气工程领域中的电力系统仿真。
本教材旨在介绍Simulink在电力系统仿真方面的应用并提供相关教学示例。
第一部分:Simulink基础知识1. Simulink的介绍和安装2. Simulink界面和基本操作3.模型构建和系统参数设置技巧4.信号传递与数据类型第二部分:电力系统基础知识1.电力系统的基本结构和组成2.电力系统的数学建模3.电力系统中常见的设备和元件4.电力系统的传输和分配第三部分:电力系统仿真建模1. Simulink中的电力系统仿真模块2.电力系统仿真建模的基本步骤3.电力系统仿真的常用工具和技巧4.电力系统仿真模型的参数选择和优化第四部分:电力系统仿真案例分析1.单相感性负载仿真模型建立与分析2.三相感性负载仿真模型建立与分析3.发电机与电力系统的并联仿真模型建立与分析4.电力系统的短路故障仿真模型建立与分析第五部分:电力系统实时仿真与调试1. Simulink与实际电力系统的接口方法2.电力系统实时仿真的基础知识3.电力系统实时仿真与调试工具的使用4.电力系统实时仿真案例与应用总结:通过本教材的学习,读者将了解到Simulink在电力系统仿真方面的基本原理、操作技巧和实际应用案例。
Simulink作为一种强大的仿真工具,不仅可以帮助电力工程师实现电力系统的仿真建模,还可以为电力系统的优化和性能评估提供有力支持。
希望本教材能为学习Simulink和电力系统仿真的读者提供帮助,促进他们在电力系统领域的发展和研究。
基于MatlabSimulink的电力系统故障仿真与

基于Matlab/Simulink的电力系统故障仿真与分析112孙 浩 李 艳 张玉欣(1.吉林化工学院 信息与控制工程学院 电气工程系 吉林 吉林 132022;2.北华大学 电气信息工程学院 吉林 吉林 132021)摘 要: 以单机无穷大系统为例,研究系统发生短路故障后故障点的电压电流情况。
利用Matlab软件,在Simulink仿真平台上搭建短路故障模型进行仿真,仿真波形符合理论分析,表明Matlab具有强大的仿真功能,有助于提高电力系统研究和设计的效率和可信度。
关键词: 电力系统;短路故障;Simulink中图分类号:TP391 文献标识码:A 文章编号:1671-7597(2012)1120023-02U S =220kV。
用三相故障元件来模拟短路故障,通过参数设置,该模0 引言块可以对相相和相地故障进行模拟。
通过Transition times可设置电力系统是一个大规模、时变的复杂系统,对国民经济起故障时间段,故障起始时间设为0.1s,切除时间设为0.25s。
其余着非常重要的作用。
随着电力工业的发展,在电力系统的研参数可用模块的默认值。
究、规划设计中,仿真软件的应用越来越广泛。
MATLAB仿真软件简单易学,使用方便,且提供了丰富的工具箱资源。
对于电力系统仿真,常用的模块库为标准SIMULINK模块库和电力系统模块库。
在Simulink仿真平台上搭建电力系统模型,若工具箱中现有元件模型达不到系统仿真的要求,可以建立子系统并进行封装[1],使我们可以更加深入地研究电力系统的行为特性。
本文主要利用Matlab软件,在Simulik仿真平台搭建模型,设置参数,对系统短路故障进行仿真,仿真波形与理论分析相符。
1 电力系统短路故障仿真电力系统的故障可分为简单故障和复合故障。
简单故障指的是电力系统中某一处发生短路或断相故障的情况,而复合故障则是指两个以上简单故障的组合。
短路故障包括三相短路、图2 系统仿真模型单相接地短路、两相短路和两相短路接地;断相故障包括断一相、断两相故障。
电力系统的MATLABSIMULINK仿真与应用_第1章

电力系统的MATLABSIMULINK仿真与应用_第1章第1章概述教:电力系统的材ATMLB/ASmuiinl仿k及应真用王晶国翁庆有兵张西电子安科大技学版出社论理教学:0学3时上机教:1学学8第1章时概述第章概述111.电系力统用常真仿软简介1件2.MATLAB/ISMUILKN述1概3.简电单演路示习题第1章述概1.1电系力常统仿用真件软介简力系电是统一个规模、大变的时杂复统系在国,民济经有中非重常的作用要。
电力系统字仿数真成已为力电系研统、究规划、行、运设计各等方面不可个缺或的具,特工是电力别系统新术的技开研究发新、装置设的、计参数确的定更是需要过仿真来确认。
目通常前用的电力系统真软件仿有:(1邦纳)维尔力电局Bonn(vileleowePrdmAniirtaiton,BP)A开发的PA程B和EMT序P(ElcteroagnmetiTcaniretnProram)程序;g1章第概述()2尼托巴曼高直压输电研流究心(M中natioabHDCReVaechrCenet)开r的发PCSDAEM/DC(TPoerwySemCtmoputrAideedDein/glectEoramngticeTranient PrgrominacudilngDirceturrenC)t序程;(3)德西国子公门司制研的力系电仿统真件软NEOMTAC(NtweokrToroniacMhnieCnotrl)o;4)(中电力科学国研究院开的电发力系分统析合综程序PSASP(oPweryStmAneayliSftowaerPackage;)()5MatWhro公k司发开的科与学工程算软件计ATLMABMat(riL某barotoary矩,实验室阵。
)第1章述概电力统分析系软件了除以几上,还有美种国加大学州伯克利校分制研的PPSCIES(miulaiotnPogramwrithnItegaretCircdiuEmthapi)美国、TP 公司开发I的PSSE/美、EPRI公国司开的ETMS发P、BBA公司开发的YMSPO程W序美和国ESAD公开发的电司力统分析系软件DSAE等。
计算机仿真实验-基于Simulink的简单电力系统仿真
实验七 基于Simulink 的简单电力系统仿真实验一. 实验目的1) 熟悉Simulink 的工作环境及SimPowerSystems 功能模块库; 2) 掌握Simulink 的的powergui 模块的应用;3) 掌握发电机的工作原理及稳态电力系统的计算方法; 4)掌握开关电源的工作原理及其工作特点; 5)掌握PID 控制对系统输出特性的影响。
二.实验内容与要求单机无穷大电力系统如图7-1所示。
平衡节点电压044030 V V =︒。
负荷功率10L P kW =。
线路参数:电阻1l R =Ω;电感0.01l L H =。
发电机额定参数:额定功率100n P kW =;额定电压n V V =;额定励磁电流70 fn i A =;额定频率50n f Hz =。
发电机定子侧参数:0.26s R =Ω,1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。
发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。
发电机阻尼绕组参数:0.0224kd R =Ω,1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。
发电机转动惯量和极对数分别为224.9 J kgm =和2p =。
发电机输出功率050 e P kW =时,系统运行达到稳态状态。
在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
G0 V三.实验步骤1. 建立系统仿真模型同步电机模块有2个输入端子、1个输出端子和3个电气连接端子。
模块的第1个输入端子(Pm)为电机的机械功率。
当机械功率为正时,表示同步电机运行方式为发电机模式;当机械功率为负时,表示同步电机运行方式为电动机模式。
在发电机模式下,输入可以是一个正的常数,也可以是一个函数或者是原动机模块的输出;在电动机模式下,输入通常是一个负的常数或者是函数。
实验1 运用MATLABSimulink进行系统仿真实验(指导书)
实验一、运用MATLAB/Simulink进行系统仿真实验一、实验目的机电一体化系统建模是进行机电一体化系统分析与设计的基础,通过对系统的简化分析建立描述系统的数学模型,进而研究系统的稳态特性和动态特性,为机电一体化系统的物理实现和后续的系统调试工作提供数据支持,而仿真研究是进行系统分析和设计的有利方法。
本实验目的在于通过实验使同学对机电一体化系统建模方法和仿真方法有初步的了解,初步掌握在MATLAB/ SIMULINK环境下对机电一体化系统数学模型进行仿真的方法。
(1)掌握机电一体化系统数学建模的基本方法;(2)掌握对机电一体化系统进行数学仿真的基本方法和步骤;(3)在初步掌握在MATLAB/ SIMULINK环境下对机电一体化系统数学模型进行仿真的方法。
二、实验设备(1)计算机(2)MATLAB/ SIMULINK软件三、实验原理(一)建立数学模型就是(以一定的理论为依据)把系统的行为概括为数学的函数关系,包括以下内容:1)确定模型的结构,建立系统的约束条件,确定系统的实体、属性与活动。
2)测取有关的模型数据。
3)运用适当理论建立系统的数学描述,即数学模型。
4)检验所建立的数学模型的准确性。
机电一体化系统数学模型的建立是否得当,将直接影响以此为依据的仿真分析与设计的准确性、可靠性,因此必须予以充分重视,以采用合理的方式、方法。
(二)机电一体化系统的计算机数字仿真实现:1)根据已建立的数学模型和精度、计算时间等要求,确定所采用的数值计算方法。
2)将原模型按照算法要求通过分解、综合、等效变换等方法转换为适于在数字计算机上运行的公式、方程等。
3)用适当的软件语言将其描述为数字计算机可接受的软件程序,即编程实现。
4)通过在数字计算机上运行,加以校核,使之正确反映系统各变量动态性能,得到可靠的仿真结果。
(三).凑试法确定PID调节参数凑试法是通过模拟或闭环运行(如果允许的话)观察系统的响应曲线(例如阶跃响应),然后根据各调节参数对系统响应的大致影响,反复凑试参数,以达到满意的响应,从而确定PID调节参数。
基于Matlab的小型电力系统的建模与仿真实验1【精品毕设、无需降重】精选全文完整版
可编辑修改精选全文完整版基于Matlab的小型电力系统的建模与仿真实验1【精品毕设、无需降重】基于Matlab的小型电力系统的建模与仿真一、实验目的电力系统的动态仿真研究将不能在实验室中进行的电力系统运行模拟得以实现。
在判定一个电力系统设计的可行性时,都可以首先在计算机机上进行动态仿真研究,它的突出优点是可行、简便、经济的。
本实验目的是通过MATLAB 的simulink环境对一个典型的工厂供电系统进行仿真,以熟悉供电系统在发生各种短路故障时的分析方法并与课堂知识进行对比学习。
二、预习与思考1、建立仿真模型,对不同短路形式进行仿真,截取仿真结果图,补充报告中每个仿真图形的名称。
2 数值仿真实验结果与课堂推导结果有什么区别与联系?3 典型的短路形式包括几种?4 根据仿真结果,说明短路时零序电流存在的必要条件?三、MATLAB PSB简介Matlab PSB(Sim Power Systems)以simulink为运行环境,涵盖了电路、电力电子、电气传动和电力系统等电气学科中常用的基本元件和系统仿真模型,它主要由6个子模块库组成。
(1)电源模块库:包括直流电压源、交流电压源、交流电流源、可控电压源、可控电流源、三相电源、三相可编程电压源;(2)基本元件模块库:串联(并联)RLC/负载/支路、变压器(单相、三相等)、断路器和三相故障部分;(3)电力电子模块库:二极管、晶闸管、GTO、IGBT、MOSFET、理想开关以及各种电力电子控制模块;(4)电机模块库:励磁装置、异步电动机、同步电动机、直流电动机以及配套的电机测量部件;(5)测量仪器库:电流测量和电压测量等;通过以上模块可以完成.各种基本的电力电子电路、电力系统电路和电气传动电路,还可以通过其他模块的配合完成更高层次的建模,如风力发电系统、机器人控制系统等等。
四、仿真模型的设计和实现在三相电力系统中,大多数故障都是由于短路故障引起的,在发生短路故障的情况下,电力系统从一种状态剧烈变化到另一种状态,并伴随着复杂的暂态现象。
基于Matlab_Simulink仿真的电力电子实验系统设计与实现
2008年6月 陕 西 理 工 学 院 学 报June .2008第24卷第2期 Journa l o f Shaanx iU niversity of T echnology V o.l 24 N o .2[文章编号]1673-2944(2008)02-0026-05基于M atlab /S m i uli nk 仿真的电力电子实验系统设计与实现韩芝侠(宝鸡文理学院电子电气工程系, 陕西宝鸡 721007)[摘 要] 目前,M a tlab 软件在各个行业应用非常广泛,设计了一个基于M a tlab /S i m ulink 仿真的电力电子实验系统。
以Buck 变换的仿真为例,应用了该实验系统的设计方法分析其结构,建立了仿真模型,并验证其结果。
使用M atlab /S i m uli n k 对电路进行分析,可以使复杂的计算变得非常简便、直观,便于学生在建模仿真过程中更加深刻的理解和掌握所学知识。
[关 键 词] M atlab /S i m uli n k; Buck 变换; 电力电子仿真[中图分类号] TN911.72 [文献标识码] B收稿日期:2007-10-26作者简介:韩芝侠(1970)),女,陕西扶风人,宝鸡文理学院讲师,硕士,主要研究方向为检测技术与自动化装置。
电力电子技术是一门新兴技术,已成为现代电气工程与自动化专业不可缺少的一门专业基础课,在培养本专业人才中占有重要地位。
该课程是由电力学、电子学和控制理论3个学科交叉而成的,内容多,知识面广,信息量大,在有限的学时内用传统的教学方法去授课,教学效果不是很理想。
如何能做到最大限度地提高单位学时的信息量,培养学生的学习兴趣和能力,提高教学质量,是实验教学所面临的挑战。
为了使学生能更直观、高效地理解和掌握所学知识,引入了仿真实验,在建模仿真的过程中将抽象的理论知识变成直观的感性认识,取得了较好的教学效果。
1 软件介绍M atlab 是以矩阵为基本编程单元的一种程序设计语言,它提供了各种矩阵的运算与操作,并有较强的绘图功能,是目前国际上最流行的控制系统计算机辅助设计软件。
基于Simulink的电力系统仿真研究
S c 科 i e n c e & 技 T e c h 视 n o l o g y 界 V i s i o n
2 矿 床成 因初 步认 识
矿区位于西万 沟一 太平镇深大断 裂上 . 受其长期 影响 . 次一 级断 裂发育 , 性质多 为张性 , 相互交错 , 是 良好 的矿液通 道和容矿空 间 . 构 成了一个 良好的聚矿构造 体系 , 控制 了区内矿化体 的产 出。南西部大 面积分布的燕山期 酸性侵 入岩 . 不断对赋矿地层 中的成矿 物质进行萃 取 .酸性岩浆活动不仅可以为内生金属矿 床的形成提供 充分 的热源 . 而且可 以为成矿提供充分的流体和成矿物质。通过岩 浆活动反复 、 深 刻的重熔改造 . 岩石经历退变质 的过程 . 岩浆本 身所含的铁 质成分 以 磁铁矿 的形式 析出 . 铁矿元素沉积 环境不断改变 . 逐步形成 一层含铁 岩石建造 。 在合适的物理、 化学环 境条件下使铁等成矿元素相对 富集 。 含矿建造是一套典型的沉积变质岩组合 , 如大理 岩、 石英片岩等 , 矿层 的顶底板也是这些岩石 。 矿体为层 状 、 似层状 产状与 围岩片理及 区域构 造线 一致 . 斜交穿切 片理现象少见 . 经资料验证成 矿的地质 时 代相 同. 同位素年龄相近 . 且和全 区的区域变质的时期一致 . 矿层 和高 含量 ( 高背景值 ) 的岩层 ( 有用 元素没有达 到工业要求 的含矿 建造 ) 常 呈渐 变过程 , 经 以上特征分 析 . 初步认 为娄后沟铁矿 为经后期变质作
4 结 论
本文针对一个简单 的电路系统 , 分 析了系统 的元 件组成 , 确定 了 系统 的控制形式 , 构建了 电路 系统的 S i m u l i n k 模型, 并分别对 不同的 增益 K值进行了迭代计 算。 从计算 结果 看 , 该 电路 系统在取 K = 2 的时 候, 系统 比较稳定 , 动态性能较 好 , 设 计较 为合理 。为后续 整个 系统的
计算机仿真 simulink实验报告
电子信息工程系实验报告课程名称:计算机仿真技术成绩:实验项目名称: Simulink基本仿真实验时间: 2008-9-17指导教师(签名):班级:通信061 姓名:学号:一、实验目的熟悉Simulink的基本模块库,掌握模块的基本操作。
学习建立简单的仿真模型的方法,并且通过建模仿真掌握Simulink模块的基本参数设置和系统仿真参数设置。
二、实验环境硬件:PC机,基本配置CPU PII以上,内存256M以上;软件:Matlab 版本6.5三、实验原理Simulink提供了大量以图形方式给出的内置系统模块,使用这些内置模块可以快速方便地设计出特定的动态系统。
Simulink的模块库能够对系统模块进行有效的管理与组织,使用Simulink模块库浏览器可以按照类型选择合适的系统模块、获得系统模块的简单描述以及查找系统模块等,并且可以直接将模块库中的模块拖动或者拷贝到用户的系统模型中以构建动态系统模型。
常见的模块有连续系统模块,离散系统模块,信号模块,数学操作模块等。
当对系统中各模块参数以及系统仿真参数进行正确设置之后,单击系统模型编辑器上的Play图标(黑色三角)或选择Simulation菜单下的Start便可以对系统进行仿真分析。
可以使用Scope观察结果波形,使用To Workspace模块将结果输出到Matlab主窗口工作区, 也可以将结果输出到mat文件。
四、实验内容及结果分析1、建立如图1所示的仿真模型,研究不同的数据输出方式。
Sine Wave模块参数默认;系统仿真参数设置选择默认方式。
图1 仿真模型1当数据输出到Workspace时,To Workspace模块Save Format参数设置为Array。
仿真后可在Workspace窗口输出采样时间变量tout和正弦波采样值变量simout。
其大小均为51×1的数组。
这是因为仿真时间为10S,默认采样间隔为0.2S。
当数据以mat格式的文件进行保存时,选择To File模块。
实验六 基于Simulink的简单电力系统仿真
通过这次实验,练习了在simulink的工作环境中建立简单电力系统的仿真模型的方法。经过两次练习,对Simulink仿真环境的操作逐渐熟练,达到了实验的预期目的。
Simulink仿真环境功能很强大,是一个不错的仿真平台,我们应该认真学习,利用它丰富的资源和强大的功能实现各种复杂电力系统的仿真与分析。
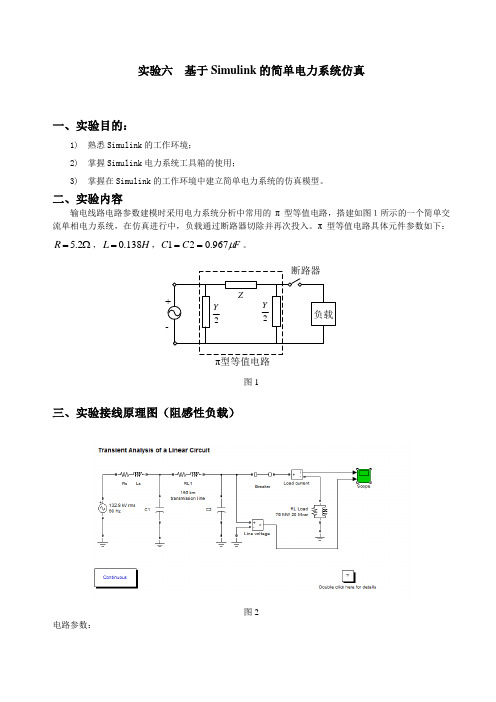
图1
三、
图2
电路参数:
电压源:
电容:
Ls 和Rs串联支路:
RL1串联支路:
LRC负载支路:
四、仿真结果
(1)阻感性负载时
图3
图5
(4)阻容性负载
图6
五、结果分析
1、当断路器断开时,线路断路,电流突变为0,但电压行波仍在进行,因此在末端能够测量到连续的电压波形,但断路器断开对电压波形造成了影响,产生了畸变,对于阻容性负载,畸变增大。这是由于能量是通过电磁场传递的,线路断开时电压继续向前传递。
2、在阻感性负载中,电压的相位超前电流的相位;断路器重新闭合时,交变的电流瞬间增加了一个直流分量,随后逐渐减小。
3、在纯阻性负载中,电压相位与电流相位相同;与阻感性负载相比,断路器重新闭合后电流没有额外的直流分量。
4、在纯容性和阻容性负载中,电压相位滞后于电流相位;断路器重新闭合时,电流瞬间突变得极大;与感性负载和纯阻性负载相比,断路器断开时的末端电压由于有电容放电作用,电压波形畸变很小。
实验六基于Simulink的简单电力系统仿真
一、实验目的:
1)熟悉Simulink的工作环境;
2)掌握Simulink电力系统工具箱的使用;
3)掌握在Simulink的工作环境中建立简单电力系统的仿真模型。
二、实验内容
输电线路电路参数建模时采用电力系统分析中常用的π型等值电路,搭建如图1所示的一个简单交流单相电力系统,在仿真进行中,负载通过断路器切除并再次投入。π型等值电路具体元件参数如下: , , 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验七 基于Simulink 的简单电力系统仿真实验
一. 实验目的
1) 熟悉Simulink 的工作环境及SimPowerSystems 功能模块库; 2) 掌握Simulink 的的powergui 模块的应用;
3) 掌握发电机的工作原理及稳态电力系统的计算方法; 4)掌握开关电源的工作原理及其工作特点; 5)掌握PID 控制对系统输出特性的影响。
二.实验内容与要求
单机无穷大电力系统如图7-1所示。
平衡节点电压0
44030 V V =∠︒ 。
负荷功率10L P kW =。
线路参数:电阻1l R =Ω;电感0.01l L H =。
发电机额定参数:额定功率100n P kW =;额定电压440 3 n V V =;额定励磁电流
70 fn i A =;额定频率50n f Hz =。
发电机定子侧参数:0.26s R =Ω,
1 1.14 L mH =,13.7 md L mH =,11 mq L mH =。
发电机转子侧参数:0.13f R =Ω,1 2.1 fd L mH =。
发电机阻尼绕组参数:0.0224kd R =Ω,
1 1.4 kd L mH =,10.02kq R =Ω,11 1 kq L mH =。
发电机转动惯量和极对数分别
为224.9 J kgm =和2p =。
发电机输出功率050 e P kW =时,系统运行达到稳态状态。
在发电机输出电磁功率分别为170 e P kW =和2100 e P kW =时,分析发电机、平衡节点电源和负载的电流、电磁功率变化曲线,以及发电机转速和功率角的变化曲线。
G 发电机节点
V
负
荷
l
R l L
L
P
图 7.1 单机无穷大系统结构图
输电线路
三.实验步骤
1. 建立系统仿真模型
同步电机模块有2个输入端子、1个输出端子和3个电气连接端子。
模块的第1个输入端子(Pm)为电机的机械功率。
当机械功率为正时,表示同步电机运行方式为发电机模式;当机械功率为负时,表示同步电机运行方式为电动机模式。
在发电机模式下,输入可以是一个正的常数,也可以是一个函数或者是原动机模块的输出;在电动机模式下,输入通常是一个负的常数或者是函数。
模块的第2个输入端子(Vf)是励磁电压,在发电机模式下可以由励磁模块提供,在电动机模式下为一个常数。
在Simulink仿真环境中打开Simulink库,找出相应的单元部件模型,构造仿真模型,三相电压源幅值为4403,频率为50Hz。
按图连接好线路,设置参数,建立其仿真模型,仿真时间为5s,仿真方法为ode23tb,并对各个单元部件模型的参数进行修改,如图所示。
2. 仿真波形输出
1.(1)发电机有功输出P=50W时
A.发电机转速、功率角、功率
B.电流波形
A.发电机转速、功率角、功率
B.电流波形
A.发电机转速、功率角、功率
B.电流波形
A.发电机转速、功率角、功率
B.电流波形
四、实验结论
对于电流曲线,输出定子电流,电源电流,负载电流。
当发电机有功功率不同时,电流幅值几乎不变,三者频率相同,近似为正弦波。
对于发电机曲线中的电机转速,随着有功功率的改变,电机转速几乎不变;功率角随着功率的增加逐渐变大,且上下振动幅度较大,在稳定值附近不断振荡。
当PM 值改为阶跃信号,有功从50kW 变到100kW 时,负载电流
几乎不变,定子电流和电源电流经过一段小时间的振动后均到达稳定值。
电机转速、功率角和功率在波动一段时间后又恢复到稳定值,波动范围较小。
实验收获:通过对交流同步电机的仿真,利用powergui模块,对系统的稳态响应及发电机的初始值进行分析,利用Bus Selector模块分选出需要的发电机输出参数,对同步电机的特性有了初步的认识。