roboTest C
MAKEX机器人挑战赛

2
3
4
5
场地介绍
❑ 场地膜尺寸为200*200cm,材质为PU 布或喷绘布。白色引导线宽度为2cm, 白色引导线末端标有任务模型摆放的位 置。
01 介绍
场地区域介绍
01 介绍
❑ 启动区,有两种,一种是指图中的红色方
框区域,只允许红方机器人在启动处进入, 蓝色方块区域,只允许蓝方机器人在启动 处进入。还有一种是红蓝公共区域,允许 双方战队机器人进入(图中黄色方框内)。
17
考试时间地点
考试时间:9月15日 等级地点:广州市第六中学
18
官方考试时间
一、 考试时间:2018年9月15日 二、考试顺序:(请注意时间顺序)
四级 理论综合 8:30-9:00分 实际操作 9:15-10:15分
三级 理论综合 10:45-11:15分 实际操作 11:30-12:30分
二级 理论综合 13:30-14:00分 实际操作 14:15-15:00分
场地任务概述
❑ 比赛时间:“蓝色星球”为任务型游戏, 机器人需通过自动程序,选手在5分钟内 (可提前结束)完成场地上的不同任务获 得对应分数。
❑ 任务介绍:全场任务共有7个独立任务和 4个联盟任务。每次赛事小学组固定抽选 4个独立任务和2个联盟任务,中学组抽 选5个独立任务和2个联盟任务,作为所 有参数队伍的比赛任务。
160 140
120
100
70
50
30
\
\
\
1-2名
\
3-4名
5-12名
\
\
\
1-4名
5-8名
9-12名
13-25名
\
\
世界技能大赛移动机器人运动控制系统设计

0引言世界技能大赛由世界技能组织举办,被誉为“技能奥林匹克”,是世界技能组织成员展示和交流职业技能的重要平台,比赛项目共分为6个大类,分别为结构与建筑技术、创意艺术和时尚、信息与通信技术、制造与工程技术、社会与个人服务、运输与物流。
移动机器人项目属于制造与工程技术领域的赛事之一,随着制造业的转型升级,技能人才的培养也扮演着越来越重要的角色,为了更好地推广移动机器人项目,让更多的院校参与世界技能大赛,让更多的学生学会利用自动控制技术设计世界技能大赛所需的移动机器人,笔者将几年来对移动机器人电机控制、运动规划方面的一些技巧及实现做了总结,旨在让更多的参与者快速学会对移动机器人的控制,更好地推动移动机器人相关专业的发展。
1系统组成1.1系统基本构成世界技能大赛移动机器人项目一般要求参赛队伍所制作的移动机器人具有较为灵活的移动能力,为了满足这一条件,普遍采用全方位移动的机器人设计。
全方位移动机器人具有全方位运动能力,其实现方式关键在于全方位的轮系结构,该结构具备每一个大轮边缘套有小轮的机构,能够避免普通轮系不能侧滑带来的非完整性运动限制,从而实现全方位运动。
在比赛中,机器人较为常用的底盘是用 3 个全向轮组成的底盘运动控制系统。
其中,三个全向轮运动轴心夹角按照 120°进行设计,之间通过3条横梁互为60°连接构成,如图1所示,底盘三个全向轮由独立的电机驱动。
底盘运动信息主要通过三个360线的编码器和一个9轴陀螺仪获取。
图1 三轮机器人效果图(左)及实物图(右)1.2系统主体框架世界技能大赛移动机器人项目所设计的机器人,既要考虑到实用性,又要考虑到使用提供指定套件来搭建。
整个指定套件提供了4个直流电机、3个舵机、1个陀螺仪、2个超声波传感器、2个红外传感器、2个限位开关,设计的机器人需要依赖于上述提供的电气元件。
笔者所使用的三轮平台由核心控制模块(MYRIO)、传感器检测模块、世界技能大赛移动机器人运动控制系统设计 章安福(广州市工贸技师学院,广州,510000)摘 要世界技能大赛移动机器人项目要求设计的机器人能够在2m×4m的平面场地中完成一定的任务,而全向轮式移动机器人为非完整性约束系统,机器人可向任意方向做直线运动而不需事先做旋转运动,同时可执行复杂的弧线运动。
ROBOTC-VEX IQ-中文版教材
contentsChapter 1Getting StartedAbout VEX IQ VEX IQWhat is ROBOTC Graphical Language? ROBOTCStandard Build Proper Motor SetupVEX IQ Firmware UpdatesInstalling ROBOTC Graphical on the VEX IQ BrainInitial Wireless SetupUploading Autonomous verse Remote Control ProgramsTroubleshootingIntro to ProgrammingHow do I start a new program?How do I write a program using ROBOTC Graphical Language?How do I save/open a new program?How do I edit a program?Chapter 2Basic movementExpedition Atlantis1Moving ForwardTurningThe Ruins of Atlantis 2Chapter 3SensorsThe Repeat Structure RepeatThe Repeat Command Repeat 1The Repeat Forever Command Repeat 2Repeat Until getMotorEncoder ValueRepeat Until getColorSensorValueRepeat Until getDistanceValueRepeat Until getJoystickValueRepeat Until getTouchLEDValueRepeat Until getGyroValueRepeat Until getBumperSensorValueRepeat Until getTimerValueChapter 4Program FlowThe While Structure Program FlowWhile SmartMotor LoopWhile BumperSensor LoopWhile Gyro LoopThe If Structure Program FlowThe If/Else StructureThe waitUntil Structure Program FlowwaitUntil BtnRUp ExampleProgramming Simple BehaviorsMotor CommandsChapter 5Remote ControlDirect ControlOperator AssistHighriseROBOTCVEX IQ ROBOTCROBOTCROBOTCROBOTCROBOTCROBOTC ROBOTCchapter 1ROBOTC”View”>”Convert Graphical File to Text”ROBOTCROBOTCVEX IQ16chapter 1VEX IQVEXIQ123 VEX IQ”Update ALL Components ”chapter 1VEXVEX IQROBOTCROBOTCUSBVEX IQROBOTCVEX IQchapter 11.ROBOTC for VEX Robotics Graphical2.”New File ””New File ”3. ”New File ””Compile Program ””Download to Robot ”在上面的课程中,我们新建了一个程序,现在我们用最简单的方法完成机器人直行的程序。
特种机器人
第28卷 增刊2002年12月自 动 化 学 报ACT A AU T OM A T ICA SIN ICA V ol.28,Suppl.Dec.,2002我国特种机器人发展战略思考王树国 付宜利(哈尔滨工业大学机器人研究所 哈尔滨 150001)(E -m ail:meylfu@)摘 要 特种机器人与工业机器人相比在理论基础、技术特征和应用领域等方面有显著特点,被列入许多国家的发展研究计划,吸引了世界众多科学家从事这方面的研究.特种机器人已成为当今国际自动化技术发展的重要方向.文中介绍了特种机器人的国内外发展现状和趋势,探讨了特种机器人的特点、共性技术和基本科学问题,并对我国特种机器人发展战略提出了若干建议.关键词 特种机器人,发展战略,自动化,中国中图分类号 T P 224ON ADVANC ED ROBOT DEVELOPMENT STRATEGY OF CHINAWANG Shu-Guo FU Yi-Li(Institute of R obot ,H ar bin I nstitu te of Te chnology ,H arbin 150001)(E -m ail:meylfu@)Abstract Compared wit h industrial robot s ,advanced robot ,which is list ed in high technology development programs of many developed count ries,presents unique characteristics on t heory basis,techniques and applicat ion f ields.At t ent ion of scientist s all over the w orld has been f ocused on advanced robot -relat ed research that has become one of t he most import ant research topics in aut omat ion.In this article,af ter an overview of development and trends in advanced robots,t heir design and applicat ions,common technologies and f oundational science problems are discussed,and suggest ion on advanced robot development st rat egy f or China is given.Key words A dvanced robot ,development st rat egy,aut omat ion,China1 特种机器人研究的应用与科学意义工业机器人作为生产自动化设备的典型代表,在制造业获得了巨大的成功.进入20世纪80年代以来,机器人技术在信息技术、控制技术、人工智能和传感技术等迅速发展的支持下,已远远超出了服务于制造业的范围,被广泛地应用于非制造领域.在非制造领域应用机器人已成为当今国际自动化技术的重要发展方向.目前国际上对非制造领域机器人(也称为advanced robot,我国称为特种机器人)的研究和开发非常活跃.特种机器人技术主要研究非制造业应用并服务于人类的各种先进机器人及其相关高技术,特种机器人是替代人在危险、恶劣环境下作业必不可少的工具,可以辅助完成人类无法完成的如空间与深海作业、精密操作、管道内作业等的关键技术装备.与工业机器人相比特种机器人通常在非结构环境下自主工作,更多依赖其对环境信息的获取和智能决策能力.因此特种机器人更强调感知、思维和复杂行动能力,比一般意义上的机器人需要更大的灵活性、机动性,具有更强的感知能力、决策能力、反应能力以及行动能力.特种机器人从外观上也远远脱离了最初工业机器人所具有的形状.特种机器人融合了更多学科的知识,如机构学、控制工程、计算机科学、人工智能、微电子学、光学、传感技术、材料科学、仿生学等,因此,特种机器人的研究不仅能促进本学科的发展,还可带动其它学科的进步.特种机器人研究特别强调智能性和对环境的适应性,使其具有更广阔的应用领域.特种机器人在空间及海洋探索、农业及食品加工、采掘、建筑、医疗、服务、交通运输、军事和娱乐等领域都具应用前景.针对各个领域的应用特点,科学技术人员正在研制各种类型的特种机器人,如空间机器人、水下机器人、服务机器人、微操作机器人、仿人机器人、医疗机器人、军用机器人等.这些特种机器人将更加符合各应用领域的特殊要求,其功能和智能程度也大大超出了工业机器人的范围,使机器人技术呈现出更加广阔的发展空间.随着陆地资源逐渐枯竭,深海开发已成为各国的重要战略目标.深海矿产资源的勘探与开采,是近几年国际激烈竞争的焦点之一.作为一种高技术手段水下机器人在海洋石油开发、海洋科学研究、海底矿藏勘测开发、海底打捞救生等方面具有重要的意义.21世纪我国的海洋多金属结核的开采工作将进入中试阶段,除了用于大洋勘测,中试采矿装置的安装、运行、维护、修理都急需多种水下机器人.作业型AUV 在海洋科学研究中,可用来进行海洋科学的各种测量、观测、监视、布放和收回仪器.在军事领域作业型AUV 与其他潜水装备互相配合,可在防险救生中发挥特有的作用.在我国经济结构调整发展战略中,已将城市化确定为产业增长的重要拉动力.城市化进程的加快将有效地带动一系列传统产业和新兴产业的高速增长.其中加大城市地下空间开发利用的力度,将城市相关基础设施建造在地下,已成为未来城镇建设的重要方向.城市各类管网的地下化和城市交通的立体化将需要开发盾构机器人与地下管线非开挖技术和装备,并将形成新兴产业.随着人民生活水平的提高,我国对医用机器和服务机器人的需要已提到议事日程.医用机器人的研究,不仅对常规医疗方面将带来一系列的技术变革,对临床或家庭的护理及康复工程等方面的发展产生深远的影响.生物技术将是21世纪重点发展的领域,它将改变医药业、农业、制造业等行业的面貌,其产业发展前景十分可观.在生物技术发展过程中,基于机器人技术的智能化微操作装置正在发挥作用.本世纪我国在无人试验飞船成功飞行的基础上,在航天技术和重大工程方面将有更大的发展.不仅要实现载人航天飞行,而且在空间探测方面,将实现月球探测,积极参与国际火星探测活动,使我国的空间探测技术上升到一个更高的水平.空间技术的发展需要机器人技术提供装备和服务.此外,在军事领域,一场新军事革命正在兴起,为适应未来高技术环境下71增刊 王树国等:我国特种机器人发展战略思考72自 动 化 学 报 28卷的作战,需要用特种机器人及自动化技术提供新一代智能化武器装备.总之,特种机器人技术在21世纪将有一个快速的发展,其应用领域及其产品市场将是不可预测的,其巨大的发展潜力将会对人类生活及社会经济发展产生巨大的推动.同时特种机器人也将是21世纪自动化科学与技术的集中体现,是最高意义上的自动化,是当今国际自动化技术发展的重要方向;特种机器人的研究必将促进自动化科学与技术的发展.2 特种机器人研究国内外发展动态与现状特种机器人技术综合了多学科的发展成果,代表了高技术的前沿发展,它在人类生活应用领域的不断扩大,正引起国际上重新认识机器人技术的作用和影响.正因为如此,研究和发展特种机器人技术一直受到世界各国的重视,许多国家都把特种机器人技术列入本国的高技术发展计划或国家的关键技术进行研究和开发.如美国的“国家关键技术”、“商业部新兴技术”和“国防部和能源部关键技术”计划,欧共体的“尤里卡计划”和“信息技术研究发展战略计划”,新加坡、韩国、巴西等发展中国家都有相应的计划内容.目前,国际上在如下领域展开特种机器人技术研究.1)水下机器人.包括有缆水下机器人与无缆水下机器人,其中无人无缆水下机器人将是主要的发展方向,并向远程化深海和作业型发展.2)空间机器人.包括舱内作业与舱外作业机器人、星际探索机器人、空间飞行器检测和维修遥控自由飞行空间机器人等.随着空间探索、开发与利用的不断深入,还会不断出现新型的空间机器人.3)工程及建筑机器人.主要应用于矿山采掘业,其中也包括各种地下输油、输气、输水管道监测维修用的爬管机器人、隧道掘进机器人、高层建筑用顶升机器人系统、顶制件安装机器人、室内装修机器人、地面磨光机器人、擦玻璃机器人等.4)医用机器人.医疗机器人是越来越受到关注的机器人应用前沿方向之一,包括外科手术机器人、生物体内诊疗微机器人系统;眼科及神经显微外科手术机器人;胸脏器官、泌尿系统及脑外科手术机器人等.目前机器人辅助外科手术及虚拟医疗手术仿真系统为研究重点.5)微机器人.近年来世界各发达国家在微机电系统的研究开发方面取得了令人瞩目的成果.专家们预测2010年微机器人的销售额将达到200亿美元.6)农业机器人.包括耕作机器人、农药喷洒机器人、收获及管理机器人、搬运机器人、剪羊毛机器人、挤牛奶机器人、草坪修剪机器人等.7)军用机器人.主要用于侦察、作战、保安、排雷等方面.8)服务机器人.主要用于家庭生活类服务及公共场所类服务,如老年人护理、残疾人护理、导盲、导购、导游等方面用机器人.9)核工业用机器人.主要用于核工业设备的监测与维修.10)娱乐机器人.娱乐、玩具机器人在本世纪会形成巨大的产业.现在国外已开发出采矿机器人、坑道水泥喷涂机器人、高层建筑清扫机器人、爬壁检测及喷漆机器人、管内爬行机器人、管外爬行机器人、生物医学用微型机器人、农业及林业用机器人、核工业机器人、深海机器人、空间机器人、军用机器人等等.生产特种机器人的公司的数量迅速增加,特种机器人产业已在国外形成,并对社会与生产力的发展发挥了重大的推动作用.我国在“863”计划支持下,在水下机器人、服务机器人、微操作机器人、爬壁机器人、管道机器人、军用机器人、仿人机器人和智能化智能机械等方面开展研究,培养了队伍,取得了一批研究成果,在某些技术方面达到了国际先进水平.但从总体上与国际发达国家相比还有较大差距,没有形成规模产业,自主知识产权的成果相对较少,对特种机器人基本科学问题和技术研究不足,跟踪研究多,自主创新少.3 特种机器人的共性技术与基本科学问题3.1 特种机器人的共性技术特种机器人大都工作在非结构性环境中,在现在及可以预见的将来,人机遥控加上局部自治,仍将是一种主要的控制方式.操作者和机器人可能在同一环境中,也可能分布在两处.分布在两处时,其联系的通信时间,在空间及深海中,可能长达分的数量级,而工作的环境,在大多数的情形下又是未知的.感知、规划、行动和交互技术是特种机器人的共性技术.1)遥控及监控技术机器人高水平的半自治功能;多机器人和操作者之间的协调控制;通过网络建立大范围内的机器人遥控系统;对有时延的环境,克服时延所造成的控制上的困难;通过事先对可能出现的情况及对策的详细研究,进行局部自治控制等.2)人机接口近几年来,在包括虚拟环境的人机接口方面的研究工作非常活跃,开发出各式各样的输入和输出装置,如三维鼠标、数据手套、快门眼镜、头盔等,各种具有更好性能的临场感方法相继被提出来,如具有类似人的大小的手、臂和双眼视觉系统等.利用临境技术建立机器人工作环境,让操作者身临其境地进行操作.目前在利用多种传感器的信息动态实时地建立环境方面,有很多问题有待研究.3)多传感器系统基于多传感器信息的获取、融合、理解、处理和控制技术将是在未知环境中实现具有高度灵活性及高鲁棒性行为的机器人的关键.4)导航和定位问题对移动式机器人来说,导航和定位是两个重要的问题.对陆上机器人来说,里程计、方向陀螺等都比较成熟;对水下短程机器人来说,定位可以利用短基线、超短基线或长基线,而用GPS 来标定,导航可采用基于方向陀螺和多普勒测速组成递推算法,并按测定的位置定时校正;对水下大航程机器人来说,目前还没有好的方法.由于长距离的水下通信问题没有解决,而海底图匹配、海底图的地理特征很难确定,试验过的方法很多,如地貌匹配、重力场、重力梯度场等都不理想,而且代价太大,目前从理论上还没有好办法.完全未知空间环境探测机器人定位也是正在探索的问题.5)机器智能特种机器人大多对其智能程度有更高的期望,满足其在未知或部分未知环境中自主作业的需要.特种机器人的智能可以体现在其工作的各个方面,包括诸如对环境的感知、信息73增刊 王树国等:我国特种机器人发展战略思考74自 动 化 学 报 28卷的处理、行为决策、与人环境的协调和自学习等.传统的符号推理系统、模糊逻辑、神经网络、遗传算法等都是人们在实现人工智能方面的努力.这方面的研究还远没有达到人类期望的目标.6)虚拟机器人技术许多特种机器人,在用于空间、水下、地面、地下、农业和食品加工、消防和救援、医疗和护理、休闲和娱乐等时,遥控不失为一种主要手段.基于多传感器、多媒体和虚拟现实、临场感的虚拟遥操作和人机交互,将成为共同需要发展的一项技术.7)网络机器人技术通讯网络技术的发展完全能够将各种机器人连接到计算机通讯网络上,并通过网络对机器人进行有效的控制.其中包括网络接口装置、众多信息组的压缩与解压方法及传输方法研究.8)多智能体协调控制技术包括用于实现决策和操作自主的有多智能体组成的群体行为控制技术.微型和微小机器人技术包括微机构、微传感及相应的微系统集成技术等.软机器人技术主要研究在未来众多的人与机器人共存的环境中,机器人对人的安全保护性技术.3.2 特种机器人研究基础关键科学问题针对21世纪我国发展特种机器人技术的战略性需求,结合国际机器人与自动化学科的前沿发展,应重点研究如下科学问题:特种机器人学中的拟人智能技术研究;未知环境信息获取、理解和控制的新机制新理论;复杂环境中的机器人自主工作新方法与新理论;机器人精确自定位新手段与新技术;生态机器人学研究,即研究生态学原理在特种机器人设计中的应用;仿人机器人运动学、动力学控制新方法;特种机器人的人机交互问题研究,包括监控技术、通讯技术和远程操作技术.4 我国特种机器人发展战略建议4.1 借鉴工业机器人发展历史,以需求牵引为原则,实现跨越式发展工业机器人的兴起和发展是制造业为提高产品质量、缩短产品制造周期和提高劳动生产率而推动的.回顾20世纪50年代以来制造业的发展历程,工业机器人的发展源于制造业自动化发展需求,成为制造自动化生产线的关键设备.工业机器人的发展推动了制造思想进步,同时工业机器人技术及系统也获得了飞速发展.因此特种机器人的发展也要以需求为原则,充分研究我国非制造业自动化的实际需要,确定特种机器人的研究领域和需发展的关键技术,有所为有所不为,发展具有我国特色的特种机器人技术.特种机器人研究一方面不能回避制约国家经济建设与产业化发展中的自动化关键技术问题,另一方面又要抢占战略性关键技术和未来可能形成新的经济增长点的竞争前核心技术,因此我国特种机器人研究既要满足当前国民经济发展的需要又要有前瞻性.前瞻性研究是企业掌握市场主动权的前提,是国家竞争力的源动力,因此前瞻性研究是高技术研究的真正内涵.在进行特种机器人研究时我们既要学习国外特别是西方发达国家的先进技术和先进经验,又要注意知识的原创新,掌握战略必争关键技术和竞争前技术,在基础和关键技术研究方面具有相当大的广度和深度,实现我国特种机器人的跨越式发展.4.2 特种机器人研究以增强国家综合经济实力、保证国家安全、提高国际竞争力为己任1)服务于非制造业自动化的发展特种机器人种类多,应用领域广,自动化程度高,因此比传统的工业机器人有更广阔的前景.立足于国民经济发展的需要,开展特种机器人研究.今后10年我国基础设施建设处于高速发展阶段,对智能化工程机械有巨大需求,在筑路、管道作业、石油钻井等方面研制机器人化智能机械满足国家经济建设发展的需要.特种机器人在21世纪的服务行业自动化过程中也大有作为,医疗机器人、娱乐机器人、康复机器人、导游机器人和家庭服务机器人等都值得关注和研究.2)满足信息技术、生物医学技术和纳米技术发展的需要提供高精度、高柔性和高智能的自动化辅助研究设备,开发面向光学工程的光纤对接微操作机器人以及微电子机械器件的加工设备,研制面向生物医学工程的微操作机器人,用于生物芯片制造的精密微操作系统.3)围绕国防发展和新资源开发的需要以提高我国国防和军事实力、加强国家安全和国际地位、充分利用海洋与宇宙资源为目的,研制军用机器人、空间机器人、深海作业机器人、载人潜器等.4.3 加强组织管理及重视国际合作我国特种机器人的研究在某些方面起步较早,拥有多项世界先进水平的研究成果.我们只要定准主攻方向、集中目标、加强管理,采用滚动资助方法,组织有条件和研究基础的研究单位,对特种机器人关键技术进行协作攻关;同时促进科研单位和企业的结合、注意关键技术与应用技术的结合,建立有效机制大力实施特种机器人应用工程,会形成拥有自己知识产权的特种机器人研究成果和应用产业.在强调独立自主的研究基础上,还要学习国外的先进技术,特别是重视国际合作.美国、日本和欧盟各国都在机器人研究方面取得了成果,也积累了许多经验,加强国际合作可加速我们的研究速度,提高研究层次,取得赶超世界先进水平的重大成果.事实上,西方各国在特种机器人的研究上也相互取常补短,如美国国防部领导的“联合机器人计划”就联合了加拿大、英国、日本、法国、德国和以色列等进行用于后勤给养运输、武器操作和复杂环境下侦察等的战场环境下的自主机器人系统.国际合作可以多种方式进行,如加入国际机器人组织、学术交流、人员互访、项目合作,官方或学者个人形式.4.4 注意相关学科的相互交叉与渗透由于特种机器人的应用环境复杂且不确定、自主工作能力和智能性要求更高,在研究过程中不可避免的涉及到更多的学科,除计算机技术、传感技术、微电子理论、控制论、信号处理等,还会跨越系统分析、概率统计、仿生学、感知论、虚拟增强现实技术、微机构学、医学、光学、新材料和生物遗传等,因此要发挥多学科的优势,注意学科间的交叉与渗透,联合攻关,协作研究,使特种机器人的研究不断取得新的成果,并真正应用到实际中去.参考文献1国家“863”计划智能机器人主题专家组.我国特种机器人发展战略研讨.200175增刊 王树国等:我国特种机器人发展战略思考76自 动 化 学 报 28卷2徐国华,谭 民.移动机器人的发展现状及其趋势.机器人技术与应用,2001,(3):14~213龚振邦.从国际大环境出发在我国机器人技术和产业发展战略上的若干思考.机器人,1999,21(6):474~4794刘进长.世纪之交我国机器人发展战略研究.机器人技术与应用,2000,(3):1~45陈佩云,金茂青,曲忠苹.我国工业机器人发展现状.机器人技术与应用,2001,(1):2~56贾培发,王全福.团结奋斗努力实现中国机器人产业化.机器人技术与应用,2000,(6):2~67谈士力.面向21世纪特种机器人技术的发展.世界科学,2001,(6):24~258Jorge M oraleda,Anibal Ollero,M ar iano Orte.A robotic s ystem for internal inspection of w ater p ipelin es.I E EE Robotics and A utomation M ag az ine,1999,6(3):30~419Caccia M,Bono R,Bruzzon e G,Ver uggio G.Variable-configuration U UVs for marine science application s.I E EE Robotics and A utomation M ag az ine,1999,6(2):22~3210Hiroshi Is higuro,T ets uo Ono,M ichita Imai.Robovie:an interactive humanoid robot.Ind ustrial R obots,2001,28(6):498~50411I James Wright.T echnology requ irements for robotic s urger y.I ndustr ial R obots,2001,28(5):392~39712Lopes L S,Connell J H,Dario P,M urphy R.Sen tience in robots:ap plications and challenges.I EE E I ntelligent Systems,2001,16(5):66~6913Chiaki T suzu ku.T he trend of robot technology in s em i-conductor and L CD indu stry.I ndustr ial Robots,2001,28(5):406~41414Rolf S chraft,Birgit Gr af,Andreas Tr aub.A mobile robot platform for assis tance and enter tainment.I ndustr ial Robots,2001,28(1):29~3515Dru in A,Hendler J,Kaufman n.Robots for kids.I EE E I ntelligent Sy stems,2001,16(1):88~9016Wei Ye,Vaughan R T,Sukh atme G S.E valu ating con tr ol strategies for wir eless-netw orked robots us ing an integrated rob ot and netw or k sim ulation.IE EE I nternational Conf er ence on Robotics and Au tomation,2001,3:2941~294717Brook s R A.In telligence w ith out reas on.I J CAI,1991:569~59518Skew is T,Lu melsky V.Exper imen ts w ith a m ob ile rob ot oper ating in a cluttered unk nown environment.Journal of Robotics Systems,1994,11(4):281~30019Bor ens tein J,Everett H R,Feng L,Wehe D.M obile robot positioning:sensors an d techniques.J our nal of R obotic Systems,1997,14(4):231~249王树国 博士,教授,博士生导师,哈尔滨工业大学校长,曾任国家“863”计划智能机器人主题专家组副组长、国家自然科学基金委员会自动化学科评审组成员、中国自动化学会机器人专业委员会理事.研究方向为特种机器人技术、虚拟现实技术等.付宜利 博士,教授,哈尔滨工业大学现代生产技术中心副主任,I EEE会员.主要研究方向为机器人运动规划方法、移动机器人技术、虚拟装配技术等.。
全国青少年机器人技术等级考试项目说明

中国电子学会 中国电子学会于1962年成立,是工业和信息化部直属事业单位,是中国科
统一大纲,考试共分为六级,需逐级进行考取,必须从第一级开始。 一级:简单机械结构搭建 二级:带电机的机械结构搭建 三级:电路实操、简单程序设计、机器人基本传感器应用 四级:高级传感器应用及机器人巡线、复杂程序设计 五级:基于物联网的机器人应用等、二维数组等语言程序编写 六级:大型复杂机器、类库设计等高级语言程序编写
学技术协会的重要团体会员单位。 中国电子学会拥有全球知名的国家级机器人专业品牌(世界机器人大会-
WRC);并以强大的学术、技术、专家、渠道资源承担着中国机器人相关团体 标准的制定和发布职能;承担着大量电子信息专业技术人员的水平评价工作。
国家教育信息化产业技术创新战略联盟 国家教育信息化产业技术创新战略联盟是由科技部培育、支持、管理,教育部报备,
清华、北大、北航、复旦等名牌大学,也已将机器人创课成绩(比 赛、考级等)作为创新意识和创新能力的衡量指标。
全国青少年机器人技术等级考试2017年第四次考试 于11月25日上午在全国102个城市开考。
全国青少年机器人技术等级考试2017年第四次考试 于11月25日在全国近102个城市开考。
全国青少年机器人技术等级考试2017年第四次考试 于11月25日在北京、上海、青岛、沈阳、海口等全国102城市同时开考。
报名费用 1级240、2级280、3级320、4级360、5级420、6级480
机器人创客教师培训与认证:铺导员、教练员、监考员、裁判等
robotc教程
但希望读者还是事先有一定的了解; z 书中所述难免有错漏,欢迎读者与我们联系来分享你们的建议和意见。 z 请 与 本 书 作 者 韦 文 潮 联 系 ( 电 子 邮 件 : wwc4677@ ) 或 登 陆 西 觅 亚 网 站
{ motor[motorC] = 100 ; wait1Msec(3000) ;
} 你也可以在“File(文件)”菜单的“Open Sample Program(打开示例程序).”在 “Training Samples(练习 示例)”文件夹中找到 “MotorC Forward.(C马达前进)”程序。
保存的名字为“Movement”。
13
现在添加一行命令将B马达以100的功率打开(第5行)。 现在下载这个程序,依次点击“Robot”Æ“Compile and Download Program(编译并下载程序)”
14
一旦程序下载完毕,Robot C的调试窗口就会出现。点击“Start”按钮运行程序。
-3-
我们建议大家购买正版软件以获得更好的服务。 随后出现的提示窗口告诉大家在没有程序被编译的情况下,某些菜单功能是不可用的。
Robot C 的界面非常简洁,在窗口左侧是函数模板,右侧的空白区域就是编写代码的位置。需要提醒的是 Robot C 提供了智能菜单,就是说当你键入几个字母后,系统会自动给出相应函数的完整拼写,同时你也 可以直接从左边的模板拖放到右边的区域来添加代码。
- 10 -
2.3.1 前进 这一节里你将学会如何让机器人完成前进的动作,以及如何通过调整时间来达到调整动作的目 的。 在上一章节里,你下载了一个示例程序让机器人的作出转弯的动作。你是不是觉得好奇,为什 么机器人能够转弯呢?你将完全弄明白它的道理并且编写程序让机器人作出前进的动作。 程序剖析 第1行: task main()
MAKEX机器人挑战赛

❑ 联盟任务:参赛队伍需与联盟队友合作完 成,完成后获得联盟任务得分
01 介绍
02 比赛流程
国内积分赛积分规则
奖励赛季积分
小型积分赛(6-12支) A类型(13-25支) B类型(26-50支) C类型(51-100支)
D类型(101-200支)
13
官方授权
14
《新一代人工智能发展规划》
• 为贯彻落实党的十九大会议关于推动人工智能和实体经济深度融合 精神以及国务院《新一代人工智能发展规划》工作部署,我国全面推进 人工智能标准化工作。 市场现状 • 能够引领AI发展的顶级人才,环顾全球,尚不足千人,自然成了供 不应求的抢手货。 • 然而,人工智能领域人才分布极不平衡,全球AI领域人才约30万, 而市场需求在百万量级。 • 其中,高校领域约10万人,产业界约20万人 • 全球共有367所具有人工智能研究方向的高校 • 每年毕业AI领域的学生约2万人,远远不能满足市场对人才的需求
16
要求这么高,孩子能过吗???
南湖畅想主要以机器人编程STEAM 教育培养青少年创新思维和综合能力。 拥有覆盖小学到大学(6-18岁)完善的 国际教育体系,美式课程,项目式学习, 为中国的孩子提供最专业的国际机器人 课程和编程课程服务。经过我们专业老 师的培训,集中式的特训,严格的模拟 考试,同学通过率高达95%。
一级 理论综合:15:30-16:00分 实际操作:16:15-16:45分
报名截止时间9月9日
19
机器人体系
20
解决课外学习三大问题 兴趣培养、知识学习、升学择校
21
全国青少年机器人技术等级考试
全国青少年机器人技术等级考试
Flex ROBO R CNC机器人辅助系统说明书

Fl e x ROBO RPre-Engineered CNC Machine Tending Robotic SystemsFor Your HAAS Machine | 800.328.3272800.328.3272 | End of Arm/DressoutFANUC RobotSecond machine on some RoboFlex models.Robot Base/PedestalElectrical Package(including Machine Interface)Depending on the model of RoboFlex, all systems include base components plus labor for set up and installation.LOWER initial investment.RoboFlex ® systems are automated machine tending systems. This diagram illustrates the core sub-systems in a typical machine tending cell which allows a robot to load/ unload your machine tools.In each of our systems, our engineers have combined these sub-systems to ensure that the robot can successfully perform the repetitive task of part exchanges during machine operation. This allows you to get the most productivity from your equipment and employees.The five main benefits you gain are:• More production through efficiency • Reduced hourly operating costs • E xtended capacity from your machine operators• Improved, consistent part quality • Easy and fast part changeoversInfeed/OutfeedDoor ActuatorHAAS Machine Tool | 800.328.3272RoboFlex ® VP PackageRoboFlex ® DS PackageF l e x R OBO VP• O ur lowest cost system • S ingle machine only • L athes and mills possible • C ompact footprint • S implest to operate• M ost compact system • M ulti-machine layoutspossible• L athes and mills possible • E ntire part queue on a single cart• A dditional carts available • E asy, fast changeoverRoboFlex VP Base PackagePopular Options(others by consultation)• F ANUC i RVision 2D part locating system • R e-grip/flip station • P art inspection/exit chute • P neumatic vertical sliding shutter • F ast servo (2) door shutter • H igh-speed servo door actuator • U pgrade to quick-change tool stem • E xtra quick-change dual gripper assembly • V ise mount casting for rotary table (8”)• S chunk KSP 160 Plus viseKey FeaturesKey FeaturesV alue P ackageD ocking S tationF l e x R OBO DSRoboFlex DS Base PackagePopular Options(others by consultation)• F ANUC i RVision 2D part locating system • R e-grip/flip station • P art inspection/exit chute • P neumatic vertical sliding shutter • F ast servo (2) door shutter • H igh-speed servo door actuator • U pgrade to quick-change tool stem • E xtra quick-change dual gripper assembly • A dditional machine integration • V ise mount casting for rotary table (8”)• S chunk KSP 160 Plus vise800.328.3272 | RoboFlex ® CS PackageF l e x R OBO CS• M ost versatile system • M ulti-machine layouts possible• L athes and mills possible • C an hold 1000 lbs of material• H eavy payload versionspossibleKey FeaturesC onveyor S ystemRoboFlex CS Base PackagePopular Options(others by consultation)• F ANUC i RVision 2D part locating system • R e-grip/flip station • P art inspection/exit chute • P neumatic vertical sliding shutter • F ast servo (2) door shutter • H igh-speed servo door actuator• E xtra quick-change dual gripper assembly • A dditional machine integration • V ise mount casting for rotary table (8”)• S chunk KSP 160 Plus viseRoboFlex ® MC Package• 20 tray system • M ulti-machine layouts possible (bigger robot)• C an hold 15 lbs per tray • 30 square feet of queue • S mall floor footprintKey FeaturesM aterial C losetF l e x R OBO MCRoboFlex MC Base PackagePopular Options(others by consultation)• F ANUC i RVision 2D part locating system • R e-grip/flip station • P art inspection/exit chute • P neumatic vertical sliding shutter • F ast servo (2) door shutter • H igh-speed servo door actuator • U pgrade to quick-change tool stem • E xtra quick-change dual gripper assembly • A dditional machine integration • V ise mount casting for rotary table (8”)• S chunk KSP 160 Plus vise。
webots简介
Webots 概述
#include <webots/robot.h> #include <webots/differential_wheels.h> #include <webots/distance_sensor.h> #define TIME_STEP 64 int main() { wb_robot_init(); // initialize Webots WbDeviceTag ds = wb_robot_get_device("ds"); // get handle and enable distance sensor wb_distance_sensor_enable(ds, TIME_STEP); while (1) {// control loop double v = wb_distance_sensor_get_value(ds); // read sensors if (v > 512) {// if obstacle detected wb_differential_wheels_set_speed(-600, 600); // turn around } else { wb_differential_wheels_set_speed(600, 600); } // go straight wb_robot_step(TIME_STEP); // run a simulation step } return 0; }
Transform
Derived from Group. Direct derived nodes: Solid. The Transform node is a grouping node that defines
EZICLEAN ASPI-ROBOT HOBOT 298 使用说明书

EZICLEAN ASPI-ROBOT HOBOT 298Contrôle de mouvementE.ZICLEAN REVOLUTION est le premier aspirateur doté d’un système de télécommande gyroscopique permettant la direction du robot aspirateur par simples mouvements du poigné.E.ZICLEAN REVOLUTION Mode d’emploiMode macro (mémorisation d’un circuit prédéfi ni)Cette fonction permet d’enregistrer un circuit précis de nettoyage adapté à votre environnement ainsi qu’à vos besoins. Votre aspirateur robot effectue le circuit programmé autant de fois que vous le souhaitez.E.ZICLEAN REVOLUTION Mode d’emploiCorps principal Chargeur Adaptateurdu chargeurCordon d’alimentation del’adaptateur du chargeurBrosse d’entretien Filtre du bac àpoussièreMode d’emploiTélécommande +Piles pour télécommande(2 X AAA)Brosses latérales(2 pièces)Porte-lavetteLavette (2 pièces)Indicateurns d’amélioration de laBoutons de commande & indicateurs de fonctionnementAUTOCORNERINTENSIVECHARGEPartie supérieure de l’indicateur de zone Partie inférieure de l’indicateur de zoneE.ZICLEAN REVOLUTION Mode d’emploiPartie arrière du dock de chargement02. Relier l’adaptateur au dock de chargement.Lorsque l’appareil est sous tension, une led bleue s’allume sur l’avant du dock.Pour recharger l’aspirateur robot, le dock de chargement doit rester branché en permanence.03. Positionner le dock de chargement.Le dock de chargement doit disposer d’un espace minimum de 1m à l’avant, à gauche et à droite.Insérer l’adaptateur dans le compartiment situé à l’arrière du dock de chargement.Ne pas exposer le dock de chargement directement aux rayons du soleil.1m1m1m05. Allumer l’interrupteur de l’aspirateur robot (situé à gauche du bac à poussière).Si l’interrupteur n’est pas allumé, aucune recharge n’est possible.06. Placer l’aspirateur robot directement sur le dock de chargement pour effectuer une recharge manuelle.Placer l’aspirateur robot de manière à ce qu’il entre en contact avec les bornes de recharge.La durée d’une recharge complète est d’environ 1h, ce qui correspond à 1h d’autonomie (qui varie selon la puissance d’aspiration sélectionnée).Les piles pour indicateur de zones (type D2) ne sont pas fournies.08. Installer l’indicateur de zones à l’endroit souhaité.Il n’est pas indispensable au fonctionnement de l’aspirateur robot..L’indicateur de zones peut être utilisé en le branchant sur un adaptateur séparé (5V).(Dans ce cas, les piles ne se déchargent pas.)12345689101112131415167OK MANUAL4. Tout en appuyant sur le bouton OK de la télécommande, réinsérer la pile manquante.Le bouton OK se met alors à clignoter en rouge et bleuLa synchronisation prend quelques secondes.5. Eteindre puis rallumer l’interrupteur de l’appareil.6. Retirer puis réinsérer les piles de la télécommande.La synchronisation est terminée.02. Appuyer sur le bouton [Marche/Arrêt].Bouton de l’aspirateur robot Touche de la télécommandeLorsque vous appuyez sur le bouton [Marche/Arrêt (START/STOP)] alors que le nettoyage est en cours,celui-ci s’arrête.Lorsque le nettoyage est arrêté et que vous appuyez sur le bouton [Marche/Arrêt (START/STOP)], le nettoyage reprend. Dans ce cas, le mode de nettoyage précédent est annulé et le nettoyage s’effectue en mode automatique.Si l’indicateur de zones est allumé, l’aspirateur robot se déplace vers la pièce où se trouve l’indicateur deSi le support de mop est installé sous l’aspirateur robot, celui-ci effectue un nettoyage sur sol dur02. Appuyer sur le bouton [Marche/Arrêt] pour démarrer le circuit.Veillez à ce que la pièce soit suffi samment éclairée afi n d’utiliser cette fonction. Dans une pièce trop obscure, l’aspirateur robot risque de ne pas identifi er l’espace sombre à nettoyer.01. Placer l’aspirateur robot sur la zone à nettoyer.Afi n de réduire le temps de déplacement, placer l’aspirateur robot devant le meuble dont vous désirez nettoyer le dessous.02. Sélectionnez le mode Dessous.Bouton de l’aspirateur robot Touche de la télécommande03. Lorsque le nettoyage est terminé, l’aspirateur robot s’arrête à son point de départ.• Lorsque le nettoyage est terminé, l’aspirateur robot s’arrête.01. Installer la lingette microfi bre sur le support de mop.02. Fixer le support de mop sous l’aspirateur robot.03. Appuyer sur la touche [Marche/Arrêt]Bouton de l’aspirateur robot Touche de la télécommande01. Si l’aspirateur robot est en route, appuyer sur la touche [Marche/Arrêt] pour l’arrêter.02. Appuyer sur la touche [OK] de la télécommande pour démarrer le moteur d’aspiration.• Appuyez de nouveau sur la touche [OK/Nettoyage manuel] si vous souhaitez arrêter l’aspiration.03. Contrôler l’aspirateur robot avec les touches de directions de la télécommande.Vous pouvez utiliser cette fonction pour simplement déplacer l’aspirateur robot.Nettoyage On/Off – Touche [OK/Nettoyage manuel] de la télécommande :Secouez légèrement la télécommande de gauche à droite afi n de démarrer/arrêter le moteur d’aspiration.Contrôle de rotation – Touche [Gauche/Droite] de la télécommande :Inclinez la télécommande vers la gauche/droite.(Avancer)(Rotation dans le sens inverse des aiguilles d’une montre)(Arrêt)(Arrêt)(Reculer)(Rotation dans le sens desaiguilles d’une montre)05. Pour annuler le contrôle de mouvement, appuyer de nouveau sur la touche MS.Vous pouvez à tout moment revenir à l’étape précédente en appuyant sur la touche de direction Gauche.06. Lorsque le réglage est terminé, appuyez sur la touche [OK] de la télécommande.1401. Appuyer sur la touche “RESERVE“.Sur l’écran de l’aspirateur robot, le numéro de programme se met à clignoter.(Les numéros de 1 à 7 correspondent aux jours de la semaine du Dimanche au Samedi.)1=Dimanche ; 2=Lundi ; 3=Mardi ; 4=Mercredi ; 5=Jeudi ; 6=Vendredi ; 7=SamediUtiliser les touches de directions Haut/Bas pour sélectionner le jour puis sur la touche de direction Droite pour passer à l’étape suivante.02. Régler l’heure puis appuyer sur la touche [OK].Le réglage de l’heure de la programmation se fait de la même manière que le réglage de l’heure actuelle.En appuyant sur la touche [RESERVE], la programmation se termine sans passer à l’étape suivante.03. Répétez les étapes 01 à 02 pour régler l’heure de chaque jour de la semaine.Pour les jours où vous ne voulez pas de programmation, réglez l’heure sur [00:00].04. Lorsque le réglage est terminé, appuyez sur la touche “RESERVE“.01. La fonction macro n’est pas disponible lorsque l’aspirateur robot est en cours de fonctionnement 02. Appuyer sur la touche [MACRO SEL] de la télécommande.03. Pour mettre en marche l’aspiration de l’appareil, appuyer sur la touche [OK]04. Sélectionner le numéro de macro à l’aide des touches de directions Gauche/Droite.05. Appuyer sur la touche [MACRO SET] de la télécommande.Le ventilateur d’aspiration se mettra alors en marche lors de l’exécution du mode macro.6402. Sélectionner le numéro de macro que vous souhaitez exécuter à l’aide des touches de directions03. Appuyez sur la touche [Start/Stop] de la télécommande. Une annonce vocale est émise, l’aspirateur04. En cas de détection d’un obstacle au cours de l’exécution, le contrôle suivant s’exécute.05. Le ventilateur d’aspiration démarre automatiquement au moment où celui-ci avait démarré lors de06. Si vous appuyez sur la touche [Start/Stop] au cours de l’exécution de macro, celle-ci s’arrête.En face02. Appuyer sur le bouton [Mode] pour sélectionner le mode [Indicator].03. Appuyer sur le bouton [Distance] pour sélectionner la distance.Appuyez répétitivement sur le même bouton jusqu’à ce que la distance désirée soit sélectionnée.Pour la plupart des maisons, optez pour une distance d’un mètre.ModePour un nettoyage par zonePour un nettoyage par pièce.Distance Vous pouvez sélectionner la distance de sortie du signal d’identification de la pièce.A chaque fois que vous appuyez sur le bouton, la distance change successivement : 1m(●) – 3m(●●) – 5m(●●●).Cette distance doit être adaptée à la largeur de la porte.Numéro de l’indicateur Vous pouvez sélectionner le numéro de la pièce.En cas d’utilisation de plusieurs indicateurs, veillez à ce que le numéro ne soit pas en double.Sélection de la zone à nettoyer IndicateurNettoyage du bac à poussière02. Oter le couvercle du bac à poussière.03. Retirer le fi ltre.Le fi ltre peut être nettoyé à l’eau, sans détergent. Une fois nettoyé, il faut le faire sécher, à l’abri de la lumière.07. Insérer le bac à poussière dans l’aspirateur robot.Le bac à poussière s’insère facilement et se fi xe grâce à un système magnétique.Remplacement du fi ltreUne fois retiré du bac à poussière puis nettoyé, le fiLa durée de vie d’un fi ltre est d’environ 6 mois mais varie selon la fréquence d’utilisation.03. Retirer la brosse principale en maintenant sa goupille de fi04. A l’aide de la brosse d’entretien, nettoyer la brosse principale.05. Réinsérer la brosse principale sous l’aspirateur robot.02. Retirer les quatre vis indiquées sur le schéma ci-dessous et ouvrir le couvercle.Le couvercle peut être enlevé à l’aide d’un petit tournevis cruciforme.E.ZICLEAN REVOLUTION Mode d’emploi04. Rebrancher le clip de la batterie neuve puis insérez la batterie dans son compartiment.05. Remettre le couvercle et revisser.E.ZICLEAN REVOLUTION Mode d’emploi。
全国青少年机器人技术等级考试-二级实操样图_金属

首页考试介绍新闻动态考试报名准考证打印成绩查询考试服务下载中心各地文件推荐器材
全国青少年机器人技术等级考试-实操样图(二级)
最后更新:2017-04-29 10:30:03 浏览:17526次
点击下载:全国青少年机器人技术等级考试实操样题——直升飞机
考试不限定使用器材,以下样图仅供参考。
二级样图-尺蠖
二级样图-舂米机
二级样图-驱动车
二级样图-挖掘机
二级样图-乌龟
手机报名
二级样图-旋转被子
二级样图-直升飞机
二级样图-缝纫机附件下载:[下载地址一]
下一篇:全国青少年机器人技术等级考试-实操样图(一级)
上一篇:全国青少年机器人技术等级考试模拟题(二级)
全国青少年机器人技术等级考试网 All Rights Reserved
QQ客服:2483429720
国家教育信息化产业技术创新战略联盟 版权所有 京ICP备15047625号-2。
ABB机器人操作

目录1 培训手册介绍--------------------------------------------22 系统安全与环境保护--------------------------------------------33 机器人综述---------------------------------------------54 机器人示教--------------------------------------------125 机器人启动--------------------------------------------256 自动生产--------------------------------------------277 编程与测试--------------------------------------------328 输入输出信号--------------------------------------------509 系统备份与冷启动--------------------------------------------5210 文件管理--------------------------------------------54在没有声明的情况下,文件中的信息会发生变化。
上海ABB工程有限公司不对此承担责任。
对文件中可能出现的错误,上海ABB工程有限公司不对此承担责任。
对于使用此文件或者此文件提及的软硬件所导致的部分或者严重性错误, 上海ABB 工程有限公司无论如何不对此承担责任。
没有上海ABB工程有限公司书面允许,此文件的任何部分不得拷印或复制,并且其中内容也不能转于第三方和用作非法目的。
否则将追究其法律责任。
文件中如有不详尽处,参阅<< User Guide >>、<< Product Manual >>、<< RAPID Reference Manual >>。
机器人编程与设计RobotBASIC

(3)超声波和红外测距
rFeel和rBumper的其中一个局限性是只能 探测距机器人很近的物体,然而,最好能够对 其路径上的远处物体进行探测,以尽早采取 行动. RobotBASIC机器人装有单一测距的传感器, 因此面向与机器人相同的方向. 函数rRange()获取机器人前方物体的距离 rRange()返回20,表明在距离机器人20个像 素处有某个物体存在.
Circle 600,500,620,520,red,red Rlocate 400,300 While rBeacon()=false rturn 1 Wend end
(6)指南针
指南针函数 rCompass(),返回机器人面对的当前 方向. 屏幕上方向:上北下南,左西右东. 北:0°,东:90°,南:180°,西:270° Rlocate 400,300 While rcompass()<>90 //东部 rturn 1 Wend end
部分编程结构
RobotBASIC一般不区分大小写
但变量名、阵列名、标签区分大小写 变量很灵活,命名无限制,可存储任意类型数据,且 可以改变变量中所存的数据类型和数值. 注释 //
部分编程结构
条件语句
1. IF 条件 THEN 一种操作 2. IF 条件 多个操作 ENDIF 3. IF 条件 操作 ELSE 操作 ENDIF
机器人编程与设计
RobotBASIC
朱映辉
特点
机器人模拟器是对各种可能情况和不同硬 件、软件组合方式进行实验的有效工具 节省组装真实机器人的时间和费用 使用RobotBASIC来编写算法使机器人与其 所处环境进行交互. 学习后不仅能对模拟器进行编程,也能够对 机器人进行编程 对模拟机器人进行编程的算法和原则同样 可应用于对真实机器人的控制
三年级湘少版英语上学期看图写单词重点知识练习题
三年级湘少版英语上学期看图写单词重点知识练习题班级:_____________ 姓名:_____________【看图填写单词】1. 根据图片,将单词补充完整。
[1] ___read [2] ___ig[3] ___oot [4] ___ine[5]fo___ [6] ___ump[7] ___pple [8] ___ift[9] ___iger [10] ___nder2. 读一读,选一选,有两项是多余的。
A.rulerB.eraserC.penD.pencil-boxE.bagF.bookG.crayonH.pencil This is Zoom’s [1]. There is a [2], [3]and a [4]. You can see an [5]in his pencil-box. Butwhere is his [6]? Haha, it’s in his hand.[1]_________[2]_________[3]_________[4]_________[5]_________[6]_________3. 给下列图片选择相应的单词或词组。
A. zebraB. monkeyC. daughterD. candiesE. watchF. English bookG. nestH. sweaterI. coatJ. boxA. zebraB. monkeyC. daughterD. candiesE. watchF. English bookG. nestH. sweaterI. coatJ. box1.________2. ________3.________4. ________5. ________6. ________7. ________ 8. ________ 9. ________ 10.________4. 看一看,选一选。
A. noseB. tailC. eyeD. earE. body5. 小朋友快来写一写。
全国青少年机器人等级考试
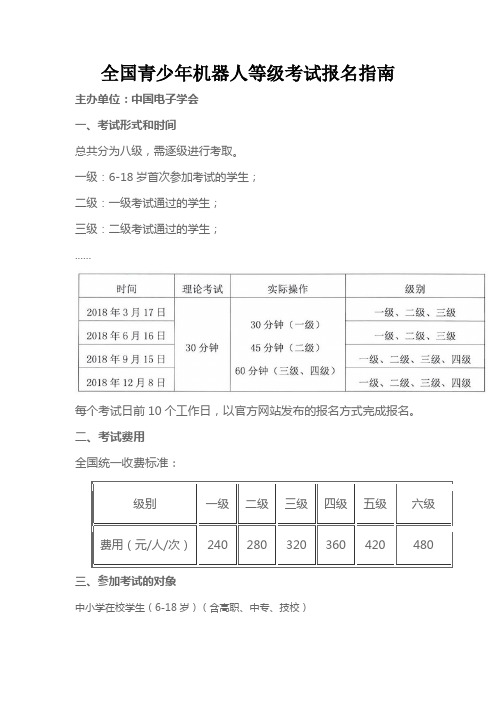
全国青少年机器人等级考试报名指南主办单位:中国电子学会一、考试形式和时间总共分为八级,需逐级进行考取。
一级:6-18岁首次参加考试的学生;二级:一级考试通过的学生;三级:二级考试通过的学生;......每个考试日前10个工作日,以官方网站发布的报名方式完成报名。
二、考试费用全国统一收费标准:三、参加考试的对象中小学在校学生(6-18岁)(含高职、中专、技校)四、实操考试装备不指定品牌,凡是符合全国青少年机器人技术等级考试的大纲要求即可,推荐使用通过评审的全国青少年机器人技术等级考试推荐器材。
五、报名流程及注意事项1、报名流程(可以来瓦力工厂机器人中心报名)在浏览器打开报名网站全国青少年机器人技术等级考试官方网站()、注册、登录、填报个人信息、上传照片、选择报考等级科目、缴费。
考生只有完成上一步骤后,才能进行下一步操作(填报数据前需要有个报考须知协议,点击按钮后才开始填报数据)。
考生要认真填写个人信息,确保姓名、身份证号等信息的准确。
姓名、身份证号请与身份证保持一致。
*在缴费确认完成报名前,考生可修改全部信息。
缴费成功后,联系方式和身份证号无法修改,其他个人信息(照片、地址等)可在『个人中心』当中修改。
报名截止日封闭修改通道,所有报名信息都无法修改。
2、照片要求考生须上传本人电子照片,上传照片后才能进行缴费确认。
电子照片为红底或蓝底的一寸免冠标准电子版照片。
纸质照片(一张)考前短信通知提交时间和方式。
3、考试地点根据各县市区及市直单位报名考试人数确定考点,具体考点地址以准考证上显示为准。
考前一周网站将公布各地考点信息。
(邯郸市第四中学、邯郸市汉光中学、邯郸市职教中心、丛台区连城小学、邯山区实验小学、邯山区南关小学、复兴区前进小学)4、准考证打印考生考前一周打印准考证,具体时间请以官网公告为准。
5、报名注意事项1)考生填报个人信息、上传照片、选择考点和报考科目后,须在报名截止日前进行缴费;否则,被系统自动取消供其考生报名信息。
Epson RC700-A 机器人控制器操作手册说明书
Controlador de robot Unidad de control RC700RC700-AUnidad de mando RC700DURC700DU-ASoftware de programación EPSON RC+7.0Manipulador Serie G1 G3 G6 G10 G20Serie RSSerie C4, C8, C12Serie N2, N6Serie X5CPD-60430Sistema de robot Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Sistema de robot Seguridad e instalación(RC700 / EPSON RC+7.0)Mod. 24Copyright 2012-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados. Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24iPRÓLOGOGracias por comprar nuestros productos de robot.Este manual contiene la información necesaria para el uso correcto del sistema derobot.Lea atentamente este manual y otros manuales relacionados antes de instalar elsistema de robot.Mantenga este manual a la mano para un acceso fácil en todo momento. GARANTÍAEl sistema de robot y las piezas opcionales se envían a nuestros clientes solo despuésde haberlos sometido a los más estrictos controles, pruebas e inspecciones de calidadpara certificar que cumplen con nuestras altas normas de rendimiento.Los productos que tengan un mal funcionamiento como resultado de lamanipulación u operación normales se repararán en forma gratuita durante elperíodo normal de la garantía. (Comuníquese con el proveedor de su región paraobtener información sobre el período de garantía).Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunquesucedan dentro del período de garantía):1.Daño o mal funcionamiento provocados por un uso inadecuado que no sedescribe en este manual o por uso descuidado.2.Mal funcionamiento provocado por el desmontaje no autorizado delproducto por parte de los clientes.3.Daños debido a ajustes inadecuados o a intentos de reparación noautorizados.4.Daño provocado por desastres naturales, como terremotos, inundaciones,etc.Advertencias, precauciones, uso:1.Si el equipo asociado al sistema de robot no se usa de acuerdo con lascondiciones de uso y las especificaciones del producto descritas en losmanuales, esta garantía queda nula.2.Si no sigue las ADVERTENCIAS y PRECAUCIONES de este manual, nopodemos hacernos responsables de ningún mal funcionamiento o accidente,incluso si tienen como resultado lesiones o la muerte.3.No podemos prever todos los posibles peligros y consecuencias. Por lotanto, este manual no puede advertir al usuario de todos los posiblespeligros.ii Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24MARCAS COMERCIALESMicrosoft, Windows y el logotipo de Windows son marcas registradas o marcascomerciales de Microsoft Corporation en los Estados Unidos y otros países. Otrasmarcas y nombres de productos son marcas comerciales o marcas registradas de susrespectivos titulares.NOTACIÓN DE MARCAS COMERCIALES EN ESTE MANUAL Sistema operativo Microsoft® Windows® 8Sistema operativo Microsoft® Windows® 10En todo este manual, Windows 8 y Windows 10 se refieren a los respectivos sistemasoperativos ya citados. En algunos casos, Windows se refiere en forma genérica aWindows 8 y Windows 10.AVISONinguna parte de este manual se puede copiar o reproducir sin autorización.El contenido de este manual está sujeto a cambios sin previo aviso.Notifíquenos si encuentra errores en este manual o si tiene comentarios con respectoa su contenido.FABRICANTESeiko Epson Corporation3-3-5 Owa, Suwa-shi, Nagano, 392-8502URL:/company/: http://www.epson.jp/prod/robots/Toyoshina PlantRobotics Solutions Operations Division6925 Toyoshina Tazawa,Azumino-shi, Nagano, 399-8285JapónTEL.: +81-(0)263-72-1530FAX: +81-(0)263-72-1685Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24iiiPROVEEDORES (País/Región)América del Nortey del Sur Epson America, Inc.Factory Automation/Robotics18300 Central AvenueCarson, CA 90746EE.UU.TEL.: +1-562-290-5910 FAX: +1-562-290-5999 CORREOELECTRÓNICO:*****************.comEuropa Epson Deutschland GmbHRobotic SolutionsOtto-Hahn-Str.4D-40670 MeerbuschAlemaniaTEL.: +49-(0)-2159-538-1800FAX: +49-(0)-2159-538-3170CORREOELECTRÓNICO:****************URL:: www.epson.de/robotsChina Epson (China) Co., Ltd.Factory Automation Division4F, Tower 1, China Central Place,81 Jianguo Road, Chaoyang District,Beijing, 100025, PRCTEL.: +86-(0)-10-8522-1199FAX: +86-(0)-10-8522-1125Taiwán Epson Taiwan Technology & Trading Ltd.Factory Automation Division15F., No.100, Song Ren Road., Xinyi Dist., Taipei City, 11073TaiwánTEL.: +886-(0)-2-8786-6688FAX: +886-(0)-2-8786-6600iv Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Corea Epson Korea Co., Ltd.Marketing Team (Robot Business)10F Posco Tower, Teheranro 134(Yeoksam-dong)Gangnam-gu, Seoul, 06235CoreaTEL.: +82-(0)-2-3420-6632FAX: +82-(0)-2-558-4271Sudeste Asiático Epson Singapore Pte. Ltd.Factory Automation System1 HarbourFront Place, #03-02,HarbourFront Tower One,Singapur 098633TEL.: +65-(0)-6586-5500FAX: +65-(0)-6271-2703India Epson India Pvt. Ltd.Sales & Marketing (Factory Automation)12th Floor, The Millenia, Tower A, No. 1,Murphy Road, Ulsoor, Bangalore,India 560008TEL.: +91-80-4566-5000FAX: +91-80-4566-5005Japón Epson Sales Japan CorporationFactory Automation Systems Department29th floor, JR Shinjuku Miraina Tower, 4-1-6Shinjuku, Shinjuku-ku, Tokyo 160-8801JapónTEL.:+81-(0)3-5919-5257FAX:+81-(0)3-5919-5402Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24vEn relación con la eliminación de la bateríaLa etiqueta con el basurero con ruedas tachado que se puede encontrar en el producto indica que este producto y las baterías incorporadas no se deben eliminar en el flujo normal de desechos domésticos. Para evitar los posibles daños ambientales o a la salud humana, separe este producto y las baterías de otros flujos de desechos para garantizar que se puedan reciclar de una manera ambientalmente correcta. Para conocer más detalles acerca de las instalaciones de recolección, comuníquese con la oficina gubernamental local o con el vendedor minorista donde compró este producto. El uso de los símbolos químicos Pb, Cd o Hg indica si estos metales se usan en la batería.Esta información solo se aplica a los clientes de la Unión Europea, de acuerdo con la DIRECTIVA 2006/66/CE DEL PARLAMENTO EUROPEO Y DEL CONSEJO DEL 6 de septiembre de 2006 acerca de las baterías y acumuladores y de las baterías y acumuladores de desecho y por la que se deroga la Directiva 91/157/CEE y la legislación, la cual se transpone e implementa en diversos sistemas legales nacionales.Para otros países, comuníquese con su gobierno local para investigar la posibilidad de reciclar su producto.El procedimiento de retiro y reemplazo de la batería se describe en los siguientes manuales: Manual del controlador / Manual del manipulador(sección Mantenimiento)Solo para clientes de CaliforniaLas baterías de litio de este producto contienenMaterial de perclorato: Se pueden aplicar procedimientos de manipulación especiales. Consulte la página /hazardouswaste/perchlorate (solo disponible en inglés.vi Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24viiAntes de leer este manualCon respecto a la compatibilidad de seguridad para la conexión de red:La función de conexión de red (Ethernet) de nuestros productos supone el uso en la red local, como la red LAN de la fábrica. No la conecte a la red externa, como Internet.Además, tome medidas de seguridad, como contra virus de la conexión de red, mediante la instalación de un software antivirus.Compatibilidad de seguridad para la memoria USB: Asegúrese de que la memoria USB no esté infectada con virus cuando se conecte al controlador.Configuración de sistema de controlLa unidad de mando RC700DU del controlador de robot está disponible para la siguiente versión.EPSON RC+ 7.0 Ver. 7.1.0 o posteriorControlador de robot RC700-ALa unidad de mando RC700DU-A del controlador de robot está disponible para la siguiente versión.EPSON RC+ 7.0 Ver. 7.1.2 o posteriorLos manipuladores se pueden conectar con las siguientes versiones. Serie C4 : EPSON RC+ 7.0 Ver.7.0.0 Serie C8 (C8XL) : EPSON RC+ 7.0 Ver.7.1.3 Serie C8(C8, C8L) : EPSON RC+7.0 Ver.7.1.4Serie C8 (montaje en pared) : EPSON RC+ 7.0 Ver.7.2.0 Serie C12 : EPSON RC+ 7.0 Ver.7.4.6 Serie N2: EPSON RC+ 7.0 Ver.7.2.0 Serie N6 (N6-A1000**) : EPSON RC+ 7.0 Ver.7.3.4 Serie N6 (N6-A850**R) : EPSON RC+ 7.0 Ver.7.4.1Serie G1, G3, G6, G10, G20, RS : EPSON RC+ 7.0 Ver.7.1.2 Serie X5: EPSON RC+ 7.0 Ver.7.3.0☞NOTA☞NOTARoHS de ChinaEsta hoja y etiqueta de período de uso de protección ambiental se basan enel reglamento de China. No es necesario preocuparse por esto en otros países. viii Seguridad e instalación (RC700 / EPSON RC+7.0) Mod. 24产品环保使用期限的使用条件关于适用于在中华人民共和国境内销售的本产品的环保使用期限,在遵守该产品的安全及使用注意事项的条件下,从生产日期开始计算,在标志的年限内,本产品中含有的有害物质不会对环境造成严重污染或对人身、财产造成严重损害。
BionicMotionRobot 生物模仿机器人说明书

BionicMotionRobot Pneumatic lightweight robot with natural movement patternsCell Coexistence Synchronised CooperationCollaborationBionicMotionRobot New approaches for human-robot collaborationSensitive and gentle or powerful and dynamic – in terms of its movements and functionality, the BionicMotionRobot is inspired by an elephant’s trunk and an octopus’s tentacles. The pneumatic lightweight robot features 12 degrees of freedom and, with its flexible bellows structure, can effortlessly implement the fluent motion sequences of its natural role models.Impressive power to weight ratioThe bionic robot arm has a load capacity of around three kilograms and weighs approximately the same itself. Depending on which gripper is fitted, it can handle a number of different objects and be used for a wide range of tasks.The concept of the flexible kinematics is based on the Bionic Handling Assistant from 2010, which, due to the safe collaboration between man and machine, was given the German Future Award. Since then, Festo has been looking intensively into systems that could relieve people of monotonous activities and at the same time pose no risk – an aspect that is becoming increasingly im-portant in everyday factory life.Whether it is shorter lead times, faster product life cycles or high flexibility with regard to quantities and variety, the requirements of the production of the future are manifold and are changing faster than ever before. This industrial change requires a new way for humans, machines and data to interact.Besides the digital networking of entire facilities, above allrobot-based automation solutions, which work hand in hand with people, play a critical role in this development. In the production of tomorrow, direct interaction between man and machine will be part of the daily routine.Collaborative working spaces of the futureThe strict separation between the manual work of the factory worker and the automated actions of the robot is being increasingly set aside. Their work ranges are overlapping and merging into a collaborative working space. In this way, human and machine will be able to work together on the same workpiece or component simultaneously in future – without having to be shielded from each other for safety reasons.As a worldwide supplier of automation technology, it is Festo’s core business to help shape the production and working worlds of the future. A key element for coming up with ideas is the Bionic Learning Network. In an alliance with external partners, Festo looks for natural phenomena and operating principles that can be transferred to technology.Paradigm shift in roboticsAt the focus of the current research work are lightweight bionic robots, which due to their natural movement patterns and the pneu-matics employed are almost predestined for collaborative working spaces and in future will be able to represent a cost-effective alter-native to classic robot concepts.The strengths of pneumatic drives have always lain in their simple handling and robustness, the low costs of acquisition and their high power density – in other words, comparatively large forces in a small space and with a low weight. Holding processes get by without further compressed air consumption and are therefore extremely energy efficient.For direct contact between human and machine, pneumatics offer another critical advantage, however: their system’s inherent flexi-bility. If an actuator is filled with compressed air, the motion gen-erated can be exactly set in terms of speed, force and rigidity. In the event of a collision, the system eases off, thus posing no risk to the worker.To be able to adjust the whole system to any settings in its dynam-ics, the valve technology used must be able to control the air flows and pressures with extreme precision and at the same time ensure the complex interconnections of many channels.Digitisation of pneumaticsWhat could until now only be implemented with a great deal of effort is made easily possible by a world first from Festo: the Festo Motion Terminal is the first pneumatic automation platform, which, using its software control system, combines the function-alities of over 50 components using apps. Digitisation is opening up completely new areas of application for pneumatics, which until now has been the reserve of electrical automation.01: Collaborative working space: Simul-taneous, common processing of a work-piece by human and robot 02: Safe handling: The combination of the BionicMotionRobot with the highly elastic TentacleGripper 03: Conceivable scenario: In action with a vacuum suction cup for flat and smooth objects 04: Tremendous power potential: The outstanding ratio of inherent weight and payload© Fraunhofer IAO, study of lightweight robots in manual assemblyBionicMotionRobot Pneumatic lightweight robot with natural movement patternsMode of operation and potential usesFor a safe and more ergonomic future working worldThe freely moving arm on the BionicMotionRobot is covered with an outer textile skin and consists of three flexible basic segments which can be put together in a modular fashion. 3D textile knitted fabric represents new fibre technology In each of the three segments, four bellows are fitted which are held together by disk-shaped ribs with a gap of about two centi-metres. A cardan joint runs between them, housing the pneumatic actuators and making sure the ribs do not twist. The 12 bellows are made of sturdy elastomer. Each one of them is surrounded by a special 3D textile cover which is knitted from both elastic and high-strength yarns.For this unique 3D textile knitted fabric, the developers took a closer look at the muscular structure of the octopus: the muscle fibres in the tentacles are aligned differently in several layers. This interaction of radially, diagonally and longitudinally oriented fibres allows the creature to move its tentacles in a targeted manner. Based on this model, the yarns in the 3D textile knitted fabric run around the bellows structures in a special pattern.If a set of bellows is supplied with compressed air, it can extend lengthways and thereby deflect the joint structure. In the radial dir-ection, the expansion of the elastomer is limited by the fixed threads in the fabric. This means that the textile can be used to exactly deter-mine at which points the structure expands, thereby generating power, and where it is prevented from expanding. This allows very large forces to be generated and turned into movement.Guidance and control with the Festo Motion Terminal The complex guidance and control of the 12-bellow kinematics is assumed by a Festo Motion Terminal. It combines high-precision mechanics, sensor technology as well as control and measuring technology in the tightest space. With the internal control algorithms of the motion apps and the installed piezo valves, flow rates and pressures can be exactly dosed and also varied to any setting in several channels simultaneously.That enables the BionicMotionRobot to perform motion sequences that are both powerful and fast as well as soft and precise – whilst the rigidity of the kinematics is freely adjustable.Due to its modular structure and this precise control of the flexible bellows structures, the robot arm can bend in three different direc-tions simultaneously and implement the fluent movements of its natural role models.Optical shape sensor for exact routingA shared shape sensor is fitted in the cardan joints on the three segments and runs like a cable along the system’s whole longitu-dinal axis. This allows it to record the position, shape and inter-actions of the whole kinematics and illustrate them virtually. The simulated model of the sensor cable follows the real sensor in real time and thus enables positioning and routing accurate to around ten millimetres.Many potential uses and application fieldsThe BionicMotionRobot could be used anywhere that compact, powerful and efficient systems are required. Its pneumatic con-struction is insensitive to dust and dirt, which also makes an application in polluted and contaminated or unhealthy surround-ings conceivable.Supporting assistance system for assemblyThe BionicMotionRobot is virtually predestined to be a helping third hand in the assembly sector. The pneumatic structures can provide relief by holding objects without heating up or consuming additional energy.A scenario in which the robot arm picks up various workpieces on its own, passes them to a person for processing and then puts them down in another place is imaginable. The worker can thus go about their work in a more ergonomic, precise, concentrated and hence more efficient manner.High user acceptance and safe handlingThe natural movements of the bionic robot arm create a sense of familiarity for the user, which increases acceptance for direct collaboration. In the event of a collision, the pneumatic kinematics automatically ease off and do not pose any danger to humans. This inherent flexibility of the system and the low tare weight allow it to be used without a protective cage, thus making an immediate and safe collaboration between human and machine possible.01: A natural role model: The counter-acting muscles in an octopus’s tentacle02: A new fibre technology: The special 3D textile knitted fabric surrounding the flexible bellows structures03: Modular structure: A look inside the pneumatic robot arm04: Virtual image: The shape sensor en-ables a simulated model of the entire kinematicsTechnical dataTotal length: ...................................................................... 850 mm Diameter : ............................................................ 130 mm/100 mm Degrees of freedom : ................................................................... 12Robot arm weight: .............................................................. 2,950 g Moved weight: ................................................................... 2,950 g Working pressure: .................................................................. 3 bar Repetition accuracy: ........................................................... ±10 mm Distance between the ribs: .................................................. 19 mm Centre distance of the ribs: ................................................. 21 mm Steering and control: Festo Motion TerminalSensor technology : 3D-effective optical shape sensor Actuator technology: Bellows produced using immersion method made of natural rubber with high-strength 3D textile knitted fabric Ribs: Gimbally connected ribs made ofcarbon-fibre-reinforced polymerPicture credits Page 2: Fraunhofer IAO, StuttgartPage 6, top left: Amir Andikfar, Jonas Lauströer, HamburgProf. Dr Martin S. Fischer, Jena Page 6, centre:deutschle cgi, Nürtingen Project participants Project initiator:Dr Wilfried Stoll, managing partner Festo Holding GmbHIdea, concept, implementation:Prof. Dieter Mankau, Frankfurt am MainProject coordination:Markus Fischer, Bissingen a. d. TeckControl technology:Prof. Dr Ivo Boblan, Beuth University of Applied Sciences, Berlin Mirco Martens, Alexander Pawluchin, Technical University of Berlin Dr Alexander Hildebrandt, Festo AG & Co. KGSensor technology:Dr Jens Teichert, Teichert Systemtechnik GmbH, LilienthalScientific consultancy, biology:Prof. Dr Martin S. Fischer, Friedrich-Schiller-University JenaConsulting:Dr Werner Fischer, MunichDesign, CAD and prototypes:Christian Ebert, Mirko Zobel, Ebert Zobel, Industrial Design,Frankfurt am MainTextile technology and pneumatics design:Walter Wörner, Gesellschaft für textilen Service mbH, Pfullingen Rex Gummitechnik GmbH & Co. KG, Pfungstadt Plastics engineering:Klaus Hilmer, Dennis Meyer, Festo Polymer GmbH, St. Ingbert Festo AG & Co. KG Ruiter Strasse 8273734 Esslingen GermanyPhone +49 711 347-0Fax+49 711 347-21 55cc @125 e n 3/2017。
EPSON RC700系列机器人系统安全和安装指南说明书
Robot Controller Control Unit RC700RC700-ADrive Unit RC700DURC700DU-A Programming Software EPSON RC+7.0 Manipulator G1 G3 G6 G10 G20 seriesRS series C4 C8 series N2 N6 seriesX5 seriesRobot System Safety and Installation (RC700 / EPSON RC+7.0) Rev.19Robot System Safety and Installation(RC700 / EPSON RC+7.0)Rev.19Copyright 2012-2019 SEIKO EPSON CORPORATION. All rights reserved. Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19 iFOREWORDThank you for purchasing our robot products.This manual contains the information necessary for the correct use of the robotsystem.Please carefully read this manual and other related manuals before installing therobot system.Keep this manual handy for easy access at all times.WARRANTYThe robot system and its optional parts are shipped to our customers only afterbeing subjected to the strictest quality controls, tests, and inspections to certify itscompliance with our high performance standards.Product malfunctions resulting from normal handling or operation will be repairedfree of charge during the normal warranty period. (Please contact the supplier ofyour region for warranty period information.)However, customers will be charged for repairs in the following cases (even if theyoccur during the warranty period):1. Damage or malfunction caused by improper use which is not described inthe manual, or careless use.2. Malfunctions caused by customers’ unauthorized disassembly.3. Damage due to improper adjustments or unauthorized repair attempts.4. Damage caused by natural disasters such as earthquake, flood, etc.Warnings, Cautions, Usage:1. If the robot system associated equipment is used outside of the usageconditions and product specifications described in the manuals, thiswarranty is void.2. If you do not follow the WARNINGS and CAUTIONS in this manual, wecannot be responsible for any malfunction or accident, even if the result isinjury or death.3. We cannot foresee all possible dangers and consequences. Therefore, thismanual cannot warn the user of all possible hazards.ii Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19TRADEMARKSMicrosoft, Windows, and Windows logo are either registered trademarks ortrademarks of Microsoft Corporation in the United States and/or other countries.Other brand and product names are trademarks or registered trademarks of therespective holders.TRADEMARK NOTATION IN THIS MANUALMicrosoft® Windows® 7 Operating systemMicrosoft® Windows® 8 Operating systemMicrosoft® Windows® 10 Operating systemThroughout this manual, Windows 7, Windows 8, and Windows 10 refer to aboverespective operating systems. In some cases, Windows refers generically toWindows 7, Windows 8, and Windows 10.NOTICENo part of this manual may be copied or reproduced without authorization.The contents of this manual are subject to change without notice.Please notify us if you should find any errors in this manual or if you have anycomments regarding its contents.MANUFACTURERSeiko Epson Corporation3-3-5 Owa, Suwa-shi, Nagano, 392-8502URL :/company/: http://www.epson.jp/prod/robots/Toyoshina PlantRobotics Solutions Operations Division6925 Toyoshina Tazawa,Azumino-shi, Nagano, 399-8285JapanTEL : +81-(0)263-72-1530FAX : +81-(0)263-72-1495Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19 iiiSUPPLIERS (Country/Region)North & South America Epson America, Inc.Factory Automation/Robotics 18300 Central AvenueCarson, CA 90746USATEL : +1-562-290-5900FAX : +1-562-290-5999E-MAIL :*****************.comEurope Epson Deutschland GmbHRobotic SolutionsOtto-Hahn-Str.4D-40670 MeerbuschGermanyTEL : +49-(0)-2159-538-1800FAX : +49-(0)-2159-538-3170E-MAIL :****************URL: : www.epson.de/robotsChina Epson (China) Co., Ltd.Factory Automation Division4F, Tower 1, China Central Place,81 Jianguo Road, Chaoyang District,Beijing, 100025, PRCTEL : +86-(0)-10-8522-1199FAX : +86-(0)-10-8522-1120Taiwan Epson Taiwan Technology & Trading Ltd.Factory Automation Division15F., No.100, Songren Rd., Sinyi Dist., Taipei City, 11073TaiwanTEL : +886-(0)-2-8786-6688FAX : +886-(0)-2-8786-6600iv Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19Korea Epson Korea Co., Ltd.Marketing Team (Robot Business)10F Posco P&S Tower, Teheranro 134(Yeoksam-dong)Gangnam-gu, Seoul, 06235KoreaTEL : +82-(0)-2-3420-6692FAX : +82-(0)-2-558-4271Southeast Asia Epson Singapore Pte. Ltd.Factory Automation System1 HarbourFront Place, #03-02,HarbourFront Tower One,Singapore 098633TEL : +65-(0)-6586-5696FAX : +65-(0)-6271-3182India Epson India Pvt. Ltd.Sales & Marketing (Factory Automation)12th Floor, The Millenia, Tower A, No. 1,Murphy Road, Ulsoor, Bangalore,India 560008TEL : +91-80-3051-5000FAX : +91-80-3051-5005Japan Epson Sales Japan CorporationFactory Automation Systems Department29th floor, JR Shinjuku Miraina Tower, 4-1-6Shinjuku, Shinjuku-ku, Tokyo 160-8801JapanTEL :+81-(0)3-5919-5257FAX :+81-(0)3-5919-5402Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19 vRegarding battery disposalThe crossed out wheeled bin label that can be found on your product indicates that this product and incorporated batteries should not be disposed of via the normal household waste stream. To prevent possible harm to the environment or human health please separate this product and its batteries from other waste streams to ensure that it can be recycled in an environmentally sound manner. For more details on available collection facilities please contact your local government office or the retailer where you purchased this product. Use of the chemical symbols Pb, Cd or Hg indicates if these metals are used in the battery.This information only applies to customers in the European Union, according to DIRECTIVE 2006/66/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL OF 6 September 2006 on batteries and accumulators and waste batteries and accumulators and repealing Directive 91/157/EEC and legislation transposing and implementing it into the various national legal systems.For other countries, please contact your local government to investigate the possibility of recycling your product.The battery removal/replacement procedure is described in the following manuals:Controller manual / Manipulator manual(Maintenance section)For California customers onlyThe lithium batteries in this product containPerchlorate Material - special handling may apply,See /hazardouswaste/perchlorate.vi Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19 viiBefore Reading This ManualConcerning the security support for the network connection:The network connecting function (Ethernet) on our products assumes the use in the local network such as the factory LAN network. Do not connect to the external network such as Internet.In addition, please take security measure such as for the virus from the network connection by installing the antivirus software.Security support for the USB memory:Make sure the USB memory is not infected with virus when connecting to the Controller.Control System ConfigurationRobot Controller Drive Unit RC700DU is available for the following version.EPSON RC+ 7.0 Ver.7.1.0 or laterRobot Controller RC700-ARobot Controller Drive Unit RC700DU-A is available for the following version.EPSON RC+ 7.0 Ver.7.1.2 or laterManipulators can be connected with the following versions. C4 series : EPSON RC+ 7.0 Ver.7.0.0 C8 series (C8XL) : EPSON RC+ 7.0 Ver.7.1.3 C8 series (C8, C8L) : EPSON RC+ 7.0 Ver.7.1.4 C8 series (wall mounting) : EPSON RC+ 7.0 Ver.7.2.0 N2 series: EPSON RC+ 7.0 Ver.7.2.0 N6 series (N6-A1000**) : EPSON RC+ 7.0 Ver.7.3.4 N6 series (N6-A850**R) : EPSON RC+ 7.0 Ver.7.4.1G1, G3, G6, G10, G20, RS series : EPSON RC+ 7.0 Ver.7.1.2 X5 series: EPSON RC+ 7.0 Ver.7.3.0☞NOTE☞NOTEChina RoHSThis sheet and environmental protection use period label are based on theregulation in China. These are not necessary to be concerned in othercountries.viii Safety and Installation (RC700 / EPSON RC+ 7.0) Rev.19产品环保使用期限的使用条件关于适用于在中华人民共和国境内销售的电器电子产品的环保使用期限,在遵守该产品的安全及使用注意事项的条件下,从生产日期开始计算,在标志的年限内,本产品中含有的有害物质不会对环境造成严重污染或对人身、财产造成严重损害。
四年级英语比较级和最高级运用超级高级单选题30题

四年级英语比较级和最高级运用超级高级单选题30题1.This dog is bigger than that dog.A.biggerB.smallerC.tallerD.shorter答案:A。
本题中“bigger than”表示“比……更大”,根据句子意思,这只狗比那只狗大,所以选A。
B 选项“smaller”是更小;C 选项“taller”是更高;D 选项“shorter”是更矮,都不符合题意。
2.Mary is shorter than Lily.A.tallerB.thinnerC.heavierD.shorter答案:D。
“shorter than”表示“比……更矮”,题干说Mary 比Lily 矮,所以选D。
A 选项“taller”是更高;B 选项“thinner”是更瘦;C 选项“heavier”是更重,均不符合。
3.The cat is fatter than the mouse.A.thinnerB.smallerC.biggerD.taller答案:A。
“fatter than”是“比……更胖”,与之相反的是“thinner”更瘦,所以选A。
B 选项“smaller”是更小;C 选项“bigger”是更大;D 选项“taller”是更高,都不合适。
4.The book is thicker than the notebook.A.thinnerB.lighterC.heavierD.smaller答案:A。
“thicker than”表示“比……更厚”,相反的是“thinner”更薄,所以选A。
B 选项“lighter”是更轻;C 选项“heavier”是更重;D 选项“smaller”是更小,不符合题意。
5.The apple is bigger than the grape.A.smallerB.sweeterC.tastierD.redder答案:A。
“bigger than”表示“比……更大”,相反的是“smaller”更小,所以选A。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Produ ct Information
Robotic Testing System ‘roboTest C’ (Compact)
I
7
2
2
2
.
5
9
Applications
The robotic testing system is used for the fully automatic
performance of tensile tests on:
•Metal specimens
(e.g. according to DIN EN10002-1, JIS Z2201,
ASTM E8)
•Dimensionally stable specimens of other materials
System Configuration
•Materials testing machine 300 kN up to 600 kN
with symmetrically closing hydraulic specimen grips
and an optional extensometer
•Robotic feeding system ‘roboTest C’ with magazine
for 24 or 40 specimens
•Industry Controller with test software testXpert® and
automation software autoEdition2
Robotic testing system ‘roboTest C’ with testing machine 600 kN Pincer gripper removes a specimen from the magazine
Advantages of the Robotic Testing System
‘roboTest C’
•A high reproducibility of the test results is obtained
because operator influences are excluded (hand
temperature, moist hands, eccentric or inclined
insertion of specimens etc.).
•Qualified laboratory staff is relieved of routine jobs and
is thus available for more complex activities.
•The machine can be used during idle times (break,
night shift) thus increasing the rate of utilization and
allowing …quicker“ results.
•The system reduces the testing costs per specimen
and usually pays off within one to two years.
•Manual tests are still possible by simply pushing the
robotic feeding system aside.
•The automatic data logging system ensures secure
documentation and enables statistical long-term
monitoring (Statistical Process Control).
Produ ct Information
Robotic Testing System ‘roboTest C’ (Compact)
Test Sequence
•The user fills the specimen magazine directly on the
test system. A refilling of specimens in magazine
places that were not yet worked off is possible at any time.
•The specimen data (ident number, width, thickness,...)
are entered on the PC. In barcode operation this step can be omitted.
•After the startup of the system on the PC, specimen
feed, tensile test and removal of the specimen fragments are carried out automatically.
Technical Data
Mechanics Mounting coupled to the load frame Capacity
24 specimens / 40 specimens Dimensions (H x W x D)2200 x 2600 x 800 mm Weight
approx. 200 kg (without specimen)
Connected values Electrical connection 3x 400V 3L/N/PE Output
2 kVA Mains frequency 50/60 Hz Compressed air
6 bar Required compressed air 10 lpm
Control Automation
autoEdition2Peripheral connection PROFIBUS
Specimens •Specimen type
dumbbells, stripes, tubes,round or profile specimens •Material
dimensionally stable,non-adhesive •Weight max. 5 kg •Length max. 450 mm •Width max. 60 mm •Thickness
max. 30 mm
Options
•Specimen identification by barcode •Specimen remains sorting
•Data exchange with superior processorsystems
(e.g. LIMS) via upload/download of ASCII-files or ODBC •Optical status indicator by threefold …traffic light“(running, refill specimens/finished, error)
Feeding of the specimen to the testing machine。