burkert 1067 定位器
burkert-1067-定位器

等待30— 120秒
THANK YOU!!!
• 让我们互相学习,构建美好未来!!
如果气源消失,阀门依靠弹簧复位
外部反馈/位置传 感器(上下动作)
Wet 破真空阀
电缆插座
外部反馈/位置传 感器 信号线
安装板
O型圈
1067定位器
执行器进气口
和定位器出气口 相连
阀门开度值由 PLC 4—20MA模 拟量信号给入
WET 真空混料破真空阀
执行器阀杆 外部反馈/位置传感器的滑块在上下滑动过程中松动\脱落 造成阀门 定位错误 产生报警
Positioner 1067 交流稿
手动/自动
电源 : 24VDC 气压0—6bar 1067 定位器分为两种 1:内部反馈/位置传感器 采用旋转电位计
2: 外部反馈/位置传感器 采用外部线性电位器 按5秒手动/自动 键进入 组态界面
Wet 真空混料 破真空阀
单作用
名词解释 单作用:气缸的移动通过仪表空气的压力,返回时由弹簧提供压力
Nucon 大料罐 放料阀
阀门 和执行 器连接处
内部反馈/位置传 感器 (转动)
双作用
名词解释
双作用:气缸的移动和返回都是通过仪表空气来提供动力。 单作用的扭矩要比双 作用的小得多。故双作用一般用于需要较大扭矩的阀门.如果两边气源同时切断 阀门将保持断气前的开度
定位器的主菜单项
• X-SENS
选择 direct
信号常开常闭输出 设定
阀门开度大于设 定值 输出信号
例如 :值设定为5 阀门关闭度大于 等于5信号输出 , 触发相关的程序 连锁,小于5不输
出
自动校正
பைடு நூலகம்
Kenwood TM-D710 GPS接口指南说明书

Home »RadioTesti Guide Tecnica Software Progetti * Link Interfacciamento tra GPS Globalsat BR-355 e Kenwood TM-D710Il GPS Globalsat BR-355 funziona egregiamente, si sincrozizza subito con i satelliti GPSe poi è difficile che si perda o che funzioni male, quindi il prodotto lo consigliovivamente.Per quanto riguarda il collegamento c'è lo schema con la piedinatura sulla confezione,comunque è facilissimo da interfacciare.Il GPS ha un cavetto ci circa un metro che termina con una spina PS2 maschio.Inizialmente, poiché non sapevo se andasse bene, ho acquistato una presa connettorePS2 femmina, ho fatto i collegamenti ed ha funzionato tutto perfettamente a primocolpo.Dato che però la connessione spina/presa era abbastanza grande e non riuscivo anascondere i cavi, ho tagliato il cavetto del GPS a circa 2 cm dalla spina, e li con deltermorestringente e stagno ho saldato il cavetto del segnale in dotazione al TM-d710 eil + e - dell'alimentazione. Anche stavolta ha funzionato tutto perfettamente a primabotta.Dato che il GPS funziona da 4.5 a 5.5V devi realizzare uno stabilizatore, io ho usato unLM7805, e due condensatori, trovi lo schema del semplice stabilizzatore sui circuititipici presente sul datasheet dell' 7805.Praticamente esso ha 3 piedini: un ingresso, l'uscita ed un comune massa, devi mettereun condensatorino tra ingresso e massa e un altro tra l'uscita e la massa; io ho fatto conun circuito stampato disegnato con un pennarello acidoresistente e poi inciso.Ho collegato l'ingresso dello stabilizzatore sottochiave alla macchina, in modo chequando spengo si spegne tutto, i due poli stabilizzati a 5 V al GPS, poi i tre terminali dicomunicazione al cavetto del Kenwood, il tutto nascosto sotto la tappezzaria, non sivede nulla; si vede solo dall'interno il GPS appiccicato con del nastro biadesivo dietrolo specchietto retrovisore el parabrezza.Nell'immagine potrete vedere i terminali dati del GPS sul cavetto che va alla radio,quelli d'alimentazine vanno ovviamente sui cavetti + e - del GPS, no ti puoi sbagliare èfacilissimo, hai lo schema delle piedinature sulla confezine del GPS.。
汽车连接器标准QCT1067解析
汽车连接器标准QC/T-1067解析随着中国汽车工业的飞速发展,汽车从满足最初的运输功能,扩展到现在具有非常多的安全性、舒适性功能。
随着功能的增加,作为汽车关键部件的汽车连接器从以前一辆车使用几十个发展到如今一辆车用几百个连接器,一百多个品种;从以前的6.3规格发展到现在的0.64规格。
而这一百多种连接器分布在驾驶室、车身、车门、发动机舱、变速器等地方,因为不同地方连接器的使用温度、振动等级的不同,对连接器的防护等级的要求不同,所以不同的使用环境对连接器的性能要求也不相同。
当前连接器标准非常多,从较早的国际标准ISO 8092、SAE标准USCAR-2,到目前中国最新修订的行业标准QC/T-1067-2017 (替代QC/T-417)。
同时很多的汽车企业也定义了属于自己企业的连接器标准,如大众公司的VW 75174、通用的GMW-3191、上汽集团的SMTC 3 862 001、吉利汽车的Q/JLYJ7110195C等。
连接器标准QC/T-1067对连接器使用环境的定义对于一款连接器,在研发之初都会在其规格书中定义出该连接器的使用环境温度、载流能力、防护等级、抗振等级等规格参数,连接器选型工程师需要了解到不同的使用环境对连接器的不同要求,这一点在目前的使用标准中也有很详细的定义。
QC/T-1067的标准定义见表1~表3:表1 QC/T-1067温度等级表2 QC/T-1067振动等级表3 QC/T-1067密封等级表4 QC/T-1067振动等级关于振动实验,我们主要验证的是连接器系统在模拟实际车载振动条件下的性能是否满足要求,因为在振动或者振动冲击情况下,会引起端子接触面的镀层磨损、正压力衰减、支撑塑料材料的机械性能失效等,所以需要在振动实验中连续监控接触电阻并保证线路中接触电阻超过7Ω(或者1Ω)的时间不能超过1微秒。
对连接器使用环境的定义与分析,我们了解到在对某个功能进行连接器选型时,首先要了解到该功能的使用位置,根据使用位置判断出需要适配的连接器耐受的温度等级、振动等级、防护等级,并进行最佳选型。
多效蒸馏水机说明书

内螺旋列管式多效蒸馏水机使用说明书NLD(300~5000-4~6)(Ⅰ,Ⅱ,Ⅲ,Ⅳ)蒸馏水产量:300、500、1000、1500、2000、3000、4000、5000 (kg/h)中国·山东淄博华周制药设备有限公司一、简介┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅1二、用途┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅1三、型号说明┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅1四、型号表┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅1五、技术参数表┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅2六、尺寸表┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅3七、结构简图┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅4八、工艺流程图┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅5九、自动控制概述┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅6十、设备安装┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅8 十一、调试准备┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅9 十二、操作指南┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅10 十三、设备维护┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅17 十四、设备除垢┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅18 十五、注意事项┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅┅19一、简介NLD系列内螺旋多效蒸馏水机,经本公司历经多年的开发研制而成,其结构为内螺旋三级分离技术,是国内最先进的机型。
其各项指标均符合《YY0229—1995》标准规定,蒸馏水内毒素<0.125Eμ/ml,产水质量完全符合2005年版药典“注射用水”规定。
本设备由蒸发器、预热器、冷凝器、机架、水泵及自动控制系统等部件组成,整机结构匀称、美观,设备运行稳定、可靠。
过流零部件均采用进口316L材质,确保水质更加纯净;自动控制零部件均采用原装进口件,确保故障率更低;设备阀门及控制按钮均设有手动操作开关,能手动运行并确保连续正常生产;换热器采用密集形列管结构;蒸发器采用降膜蒸发原理多效蒸发;汽水分离装置采用独特的内螺旋三级分离技术(即双层螺旋和除沫器),本结构为国内首创,确保纯蒸汽与其中夹带的微小水滴彻底分离。
BURKERT 宝帝 8020A 流量传感器

4 调试......................................................................13 4.1 调试标准型8020.................................................... .......13 4.1.1 检查接头内孔.......................................................13 4.1.2 流量测量...........................................................13 4.2 调试可调脉冲输出的8020....................................................14 4.2.1 设置K系数..........................................................14 4.2.2 设置放大倍数.......................................................15 4.3 调试4-20mA输出的8020....................................................16 4.3.1 显示和操作元件....................................................16 4.3.2 标准模式...........................................................17 4.3.3 设置模式...........................................................17
FMB920 小型智能追踪器快速手册说明书

FMB920Small and smart trackerQuick Manual v1.8CONTENTKnow your device (3)Pinout (4)Wiring scheme (5)Set up your device (6)PC Connection (Windows) (7)How to install USB drivers (Windows) (7)Configuration (8)Quick SMS configuration (10)Mounting recommendations (12)Basic characteristics (13)LED indications (13)Electrical characteristics (16)Safety information (17)Certification and Approvals (18)Warranty (19)Warranty disclaimer (19)KNOW YOUR DEVICETOP VIEWBOTTOM VIEW (WITHOUT COVER)PIN NUMBER PIN NAME DESCRIPTION1VCC (6-30) V DC (+)(Red) Power supply(+6-30 V DC)2GND (-)(Black) Ground3DIN1(Yellow) Digital input, channel 1. DEDICATED FOR IGNITION INPUT4AIN1(Grey) Analog input, channel 1. Input range: 0-30 V DC5DOUT1(White) Digital output. Open collector output. Max. 0,5 A DCPINOUT23451FMB920 pinoutWIRING SCHEMESET UP YOUR DEVICEHOW TO INSERT MICRO-SIM CARD41COVER REMOVAL3BATTERY CONNECTION2MICRO-SIM CARD INSERTATTACHING COVER BACKGently remove FMB920 cover using plastic pry tool from both sides.Insert Micro-SIM card as shown with PIN request disabled or read our Wiki 1how to enter it later in Teltonika Configurator 2. Make sure that Micro-SIM card cut-off corner is pointing forward to slot.1 /index.php?title=FMB920_Security_info 2 /view/Teltonika_ConfiguratorConnect the battery as shown on device. Position the battery in place where it does not obstruct other components.After configuration, see PC Connection (Windows)3, attach device cover back.3 Page 7, "PC Connection (Windows)"PC CONNECTION (WINDOWS)HOW TO INSTALL USB DRIVERS (WINDOWS)1. Please download COM port drivers from here 1.2. Extract and run TeltonikaCOMDriver.exe .3. Click Next in driver installation window.4. In the following window click Install button.5. Setup will continue installing the driver and eventually the confirmation window will appear. Click Finish to complete thesetup.1 /downloads/en/fmb920/TeltonikaCOMDriver.zip1. Power-up FMB920 with DC voltage (6 – 30 V) power supply using power wires. LED’s should start blinking, see “LED indications 1”.2. Connect device to computer using Micro-USB cable or Bluetooth connection:• Using Micro-USB cable• You will need to install USB drivers, see “How to install USB drivers (Windows)2”• Using Bluetooth• FMB920 Bluetooth is enabled by default. Turn on Bluetooth on your PC, then select Add Bluetooth or other device > Bluetooth . Choose your device named – “FMB920_last_7_imei_digits ”, without LE in the end.• Enter default password 5555, press Connect and then select Done .3. You are now ready to use the device on your computer.1 Page 13, "LED indications"2 Page 7, "How to install USB drivers (Windows)"CONFIGURATIONAt first FMM003 device will have default factory settings set. These settings should be changed according to the users needs. Main configuration can be performed via Teltonika Configurator1 software. Get the latest Configurator version from here2. Configurator operates on Microsoft Windows OS and uses prerequisite MS .NET Framework. Make sure you have the correct version installed.1 /view/Teltonika_Configurator2 /view/Teltonika_Configurator_versionsMS .NET REQUIREMENTSOperating system MS .NET Framework version Version LinksWindows VistaWindows 7MS .NET Framework 4.6.232 and 64 bit 1 Windows 8.1Windows 101 /en-us/download/dotnet-framework/net462Downloaded Configurator will be in compressed archive. Extract it and launch Configurator.exe. After launch software language can be changed by clicking in the right bottom corner.Configuration process begins by pressing on connected device.After connection to Configurator Status window will be displayed.Various Status window1 tabs display information about GNSS2, GSM3, I/O4, Maintenance5 and etc. FMB920 has one user editable profile, which can be loaded and saved to the device. After any modification of configuration the changes need to be saved to device using Save to device button. Main buttons offer following functionality:Load from device – loads configuration from device.Save to device – saves configuration to device.Load from file – loads configuration from file.Save to file – saves configuration to file.Update firmware – updates firmware on device.Read records – reads records from the device.Reboot device – restarts device.Reset configuration– sets device configuration todefault.Most important configurator section is GPRS – where all your server and GPRS settings6can be configured and Data Acquisition7 – where data acquiring parameters can be configured. More details about FMM003 configuration using Configurator can be found in our Wiki8.1 /view/FMB920_Status_info2 /view/FMB920_Status_info#GNSS_Info3 /view/FMB920_Status_info#GSM_Info4 /view/FMB920_Status_info#I.2FO_Info5 /view/FMB920_Status_info#Maintenance6 /index.php?title=FMB920_GPRS_settings7 /index.php?title=FMB9201_Data_acquisition_ settings8 /index.php?title=FMB920_ConfigurationQUICK SMS CONFIGURATIONDefault configuration has optimal parameters present to ensure best performance of track quality and data usage.Quickly set up your device by sending this SMS command to it:Note: Before SMS text, two space symbols should be inserted.GPRS SETTINGS:2001 – APN2002 – APN username (if there are no APN username,empty field should be left)2003 – APN password (if there are no APN password, empty field should be left)SERVER SETTINGS:2004 – Domain 2005 – Port2006 – Data sending protocol (0 – TCP, 1 – UDP)123456DEFAULT CONFIGURATION SETTINGSDEVICE MAKES A RECORD ON MOVING IF ONE OF THESE EVENTS HAPPEN:MOVEMENT AND IGNITION DETECTION:VEHICLE MOVEMENTwill be detected by accelerometer300seconds passesVEHICLE DRIVES 100 metersIGNITION WILL BE DETECTED by vehicle power voltage between 13,2 – 30 VVEHICLE TURNS 10 degreesSPEED DIFFERENCEbetween last coordinate and currentposition is greater than 10 km/hAfter successful SMS configuration, FMB920 device will synchronize time and update records to configured server. Time intervals and default I/O elements can be changed by using Teltonika Configurator 1 or SMS parameters 2.1 /view/Teltonika_Configurator2 /view/Template:FMB_Device_Family_Parameter_listDEVICE MAKES A RECORD ON STOP IF:RECORDS SENDING TO SERVER:1 HOUR PASSESwhile vehicle is stationary and ignition is offIF DEVICE HAS MADE A RECORDit is sent to the server every 120 secondsMOUNTING RECOMMENDATIONSCONNECTING WIRES• Wires should be fastened to the other wires or non-moving parts. Try to avoid heat emitting and moving objects near the wires.• The connections should not be seen very clearly. If factory isolation was removed while connecting wires, it should be applied again.• If the wires are placed in the exterior or in places where they can be damaged or exposed to heat, humidity, dirt, etc., additional isolation should be applied.• Wires cannot be connected to the board computers or control units.CONNECTING POWER SOURCE• Be sure that after the car computer falls asleep, power is still available on chosen wire. Depending on car, this may happen in5 to 30 minutes period.• When module is connected, measure voltage again to make sure it did not decrease.• It is recommended to connect to the main power cable in the fuse box.• Use 3A, 125V external fuse.CONNECTING IGNITION WIRE• Be sure to check if it is a real ignition wire i. e. power does not disappear after starting the engine.• Check if this is not an ACC wire (when key is in the first position, most of the vehicle electronics are available).• Check if power is still available when you turn off any of vehicles devices.• Ignition is connected to the ignition relay output. As alternative, any other relay, which has power output when ignition is on, may be chosen.CONNECTING GROUND WIRE• Ground wire is connected to the vehicle frame or metal parts that are fixed to the frame.• If the wire is fixed with the bolt, the loop must be connected to the end of the wire.• For better contact scrub paint from the spot where loop is going to be connected.BEHAVIOUR MEANINGPermanently switched on GNSS signal is not received Blinking every secondNormal mode, GNSS is working OffGNSS is turned off because:Device is not working or Device is in sleep modeBlinking fast constantlyDevice firmware is being flashedBEHAVIOUR MEANING Blinking every secondNormal mode Blinking every two secondsSleep mode Blinking fast for a short time Modem activityOffDevice is not working or Device is in boot modeLED INDICATIONSNAVIGATION LED INDICATIONSSTATUS LED INDICATIONSBASIC CHARACTERISTICSMODULE Name Teltonika TM2500Technology GSM, GPRS, GNSS, BLUETOOTHGNSS GNSS GPS, GLONASS, GALILEO, BEIDOU, SBAS, QZSS, DGPS, AGPS Receiver33 channel Tracking sensitivity -165 dBM Accuracy < 3 m Hot start < 1 s Warm start < 25 s Cold start < 35 sCELLUAR Technology GSM2G bandsQuad-band 850 / 900 / 1800 / 1900 MHzData transfer GPRS Multi-Slot Class 12 (up to 240 kbps), GPRS Mobile Station Class B Data supportSMS (text/data)POWERInput voltage range 6 - 30 V DC with overvoltageprotectionBack-up battery170 mAh Li-Ion battery (0.63Wh) Internal fuse 3 A, 125 VPower consumption At 12V < 2 mA (Ultra Deep Sleep1) At 12V < 4 mA (Deep Sleep2)At 12V < 5 mA (Online Deep Sleep3) At 12V < 6 mA (GPS Sleep4)At 12V < 35 mA (nominal with no load)At 12V < 1A Max. (with full Load / Peak)BLUETOOTHSpecification 4.0 + LE1 wiki.teltonika.lt/index.php?title=FMB920_Sleep_modes&Ultra_Deep_ Sleep_mode2 wiki.teltonika.lt/index.php?title=FMB920_Sleep_modes&Deep_Sleep_ mode3 wiki.teltonika.lt/index.php?title=FMB920_Sleep_modes&Online_Deep_ Sleep_mode4 wiki.teltonika.lt/index.php?title=FMB920_Sleep_modes&GPS_Sleep_ mode SupportedperipheralsTemperature and Humiditysensor5, Headset6, OBDII dongle7,Inateck Barcode Scanner INTERFACEDigital Inputs1Digital Outputs1Analog Inputs1GNSS antenna Internal High GainGSM antenna Internal High GainUSB 2.0 Micro-USBLED indication 2 status LED lightsSIM Micro-SIMMemory128MB internal flash memory PHYSICAL SPECIFICATIONDimensions79 x 43 x 12 mm (L x W x H) Weight54 g5 teltonika.lt/product/bluetooth-sensor6 wiki.teltonika.lt/view/How_to_connect_Blue-tooth_Hands_Free_ adapter_to_FMB_device7 wiki.teltonika.lt/view/How_to_connect_OBD_II_Blue-tooth_Dongle_to_ FMB_deviceOPERATING ENVIRONMENTOperatingtemperature(without battery)-40 °C to +85 °CStorage temperature(without battery)-40 °C to +85 °C Operating humidity5% to 95% non-condensing Ingress ProtectionRating IP54Battery chargetemperature0 °C to +45 °CBattery dischargetemperature-20 °C to +60 °CBattery storage temperature -20 °C to +45 °C for 1 month -20 °C to +35 °C for 6 monthsFEATURESSensors AccelerometerScenarios Green Driving, Over Speeding detection, Jamming detection, GNSS Fuel Counter, DOUT Control Via Call, Excessive Idling detection, Unplug detection, Towing detection, Crash detection, Auto Geofence, Manual Geofence, Trip88 /view/FMB920_Features_settingsSleep modes GPS Sleep, Online Deep Sleep,Deep Sleesp, Ultra Deep Sleep9Configuration andfirmware updateFOTA Web10, FOTA11, TeltonikaConfigurator12 (USB, Bluetooth),FMBT mobile application13(Configuration)SMS Configuration, Events, DOUTControl, DebugGPRS commands Configuration, DebugTimeSynchronization GPS, NITZ, NTPFuel monitoring LLS (Analog), OBDII dongle14 Ignition detectionDigital Input 1, Accelerometer,External Power Voltage, Engine RPM(OBDII dongle14)9 /view/FMB920_Sleep_modes10 /view/FOTA_WEB11 /view/FOTA12 /view/Teltonika_Configurator13 /view/FMBT_Mobile_application14 /view/How_to_connect_OBD_II_Bluetooth_ Dongle_to_FMB_deviceELECTRICAL CHARACTERISTICSCHARACTERISTICDESCRIPTION VALUE SUPPLY VOLTAGE MIN.TYP.MAX.UNITSupply Voltage(RecommendedOperating Conditions)+6+30V DIGITAL OUTPUT (OPEN DRAIN GRADE)Drain current (DigitalOutput OFF)120µA Drain current(Digital Output ON,RecommendedOperating Conditions)0.5AStatic Drain-Sourceresistance (DigitalOutput ON)300mΩDIGITAL INPUTInput resistance (DIN1)47kΩInput voltage(RecommendedOperating Conditions)030V Input Voltage threshold 2.5V CHARACTERISTICDESCRIPTION VALUESUPPLY VOLTAGE MIN.TYP.MAX.UNIT ANALOG INPUTInput Voltage(RecommendedOperating Conditions)030V Input resistance150kΩMeasurement erroron 12V3% Additional error on 12V360mV Measurement erroron 30V3% Additional error on 30V900mVThis message contains information on how to operate FMB920 safely. By following these requirements and recommendations, you will avoid dangerous situations. You must read these instructions carefully and follow them strictly before operating the device!•The device uses SELV limited power source. The nominal voltage is +12 V DC. The allowed voltage range is +6...+30 V DC.•To avoid mechanical damage, it is advised to transport the device in an impact-proof package. Before usage, the device should be placed so that its LED indicators are visible. They show the status of device operation.•When connecting the connection (1x5) cables to the vehicle, the appropriate jumpers of the power supply of the vehicle should be disconnected.• Before dismounting the device from the vehicle, the 1x5 connection must be disconnected.•The device is designed to be mounted in a zone of limited access, which is inaccessible to the operator. All related devices must meet the requirements of EN 62368-1 standard.•The device FMB920 is not designed as a navigational device for boats.SAFETY INFORMATIONDo not disassemble the device. If the device is damaged, the power supply cables are not isolated or the isolation is damaged, DO NOT touch the device before unplugging the powe supply.All wireless data transferring devices produce interference that may affect other devices which are placed nearby.The device must be firmly fastened in a predefined location.The programming must be performed using a PC with autonomic power supply.The device must be connected only by qualified personnel.Installation and/or handling during a lightning storm is prohibited.The device is susceptible to water and humidity.CERTIFICATION AND APPROVALSThis sign on the package means that it is necessary to read the User‘s Manual before your start using the device. Full User‘s Manual version can be found in our Wiki 1.1 /index.php?title=FMB920Hereby, Teltonika declare under our sole responsibility that the above described product is in conformity with the relevant Community harmonization: European Directive 2014/53/EU (RED).E-Mark and e-Mark are the European conformity marks issued by the transport sector, indicatingthat the products comply with relevant laws and regulations or directives. Vehicles and relatedproducts need to go through the E-Mark certification process to be legally sold in Europe.SIRIM QAS International Sdn. Bhd. is Malaysia’s leading testing,inspection and certification body.The RoHS1 is a directive regulating the manufacture, import and distribution of Electronics and Electrical Equipment (EEE) within the EU, which bans from use 10 different hazardous materials (to date).The Declaration EAC and the Certificate EAC in conformity with the technical regulation TR CU of the EurAsEC Customs Union are EAC certification documents issued by independent organizations. Such organizations perform their function through laboratories accredited to the public agencies in charge of the supervision of metrology and standardization in the three countries of the EAC Custom Union, joining at the moment the certification system : Russia, Belarus, Kazakhstan, Armenia and Kyrgyzstan.Para maiores informações, consulte o site da ANATEL .brEste equipamento não tem direito à proteção contra interferência prejudicial e não pode causar interferência em sistemas devidamente autorizados.For more information, see the ANATEL website .brThis equipment is not entitled to protection against harmful interference and must not cause interference in duly authorized systems.This sign on the package means that all used electronic and electric equipment should not be mixed with general household waste.CHECK ALL CERTIFICATES All newest certificates may be found in our Wiki 2.2 /view/FMB920_Certification_%26_ApprovalsREACHREACH addresses the production and use of chemical substances, and their potential impacts on both human health and the environment. Its 849 pages took seven years to pass, and it has been described as the most complex legislation in the Union's history and the most important in 20 years. It is the strictest law to date regulating chemical substances and will affect industries throughout the world.WARRANTYWe guarantee our products 24-month warranty1 period.All batteries carry a 6-month warranty period.Post-warranty repair service for products is not provided.If a product stops operating within this specific warranty time, the product can be:• Repaired• Replaced with a new product• Replaced with an equivalent repaired product fulfilling the same functionality• Replaced with a different product fulfilling the same functionality in case of EOL for the original product1 Additional agreement for an extended warranty period can be agreed upon separately. WARRANTY DISCLAIMER• Customers are only allowed to return products as a result of the product being defective, due to order assembly or manufacturing fault.• Products are intended to be used by personnel with training and experience.• Warranty does not cover defects or malfunctions caused by accidents, misuse, abuse, catastrophes, improper maintenance or inadequate installation – not following operating instructions (including failure to heed warnings) or use with equipment with which it is not intended to be used.• Warranty does not apply to any consequential damages.• Warranty is not applicable for supplementary product equipment (i. e. PSU, power cables, antennas) unless the accessory is defective on arrival.• More information on what is RMA11 /view/RMA_guidelines。
宝德8692型定位器-快速入门中文说明书

3 ... 7 bar
7 l N / min (进气和排气) (QNn 值依据压力从 7 bar绝压 下降到 6 bar绝压的定义) 可选:130 lN / min (进气和排气) (仅限单作用阀)
插管接头 Ø6 mm / 1/4" 可按需提供: G1/8
14
工作条件
警告!
180 Ω at 0/4 - 20 mA / 分辨率 12 bit 19 kΩ at 0 - 5/10 V / 分辨率 12 bit 3 ,符合 VDE 0580
10 mA
输出电流0/4 ... 20 mA
时的最大负载
560 Ω
感应接近开关的 电流限值
100 mA
二进制输出 电流限值 二进制输入
电气隔离
l/s
MENU PV POS INPUT*
POS %
XXX
MENU SP CMD MANU
CMD %
XXX
MENU POS TEMP MANU
XXX TEMP
*C
MENU CMD PV
XXX INPUT
mA
MENU TEMP POS
设定位置的输入信号 (0 – 5/10 V / 0/4 – 20 mA)
该定位器有两种电气连接选项: • 多针连接 • 电缆接头
信号参数 电源电压 设定值 (过程设定值 / 位置设定值)
实际过程值 (仅限过程控制器)
24 V DC
0 ... 20 mA; 4 ... 20 mA 0 ... 5 V; 0 ... 10 V
2
所用符号
本手册中使用的符号有: 危险!
警告即时危险! • 如不遵守该警告可能会导致致命的或严重的伤害。
Burkert产品型号2301、2300、2103和2702的数字电动定位器说明书
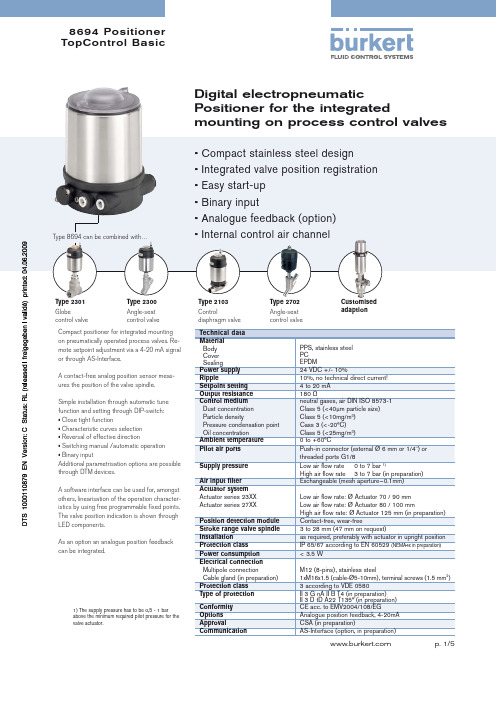
8694 Positioner TopControl BasicType 2301Globecontrol valveType 2300Angle-seat control valveType 2103Controldiaphragm valveType 2702Angle-seatcontrol valveCustomisedadaptionDigital electropneumaticPositioner for the integratedmounting on process control valvesCompact positioner for integrated mounting on pneumatically operated process valves. Re-mote setpoint adjustment via a 4-20 mA signal or through AS-Interface.A contact-free analog position sensor meas-ures the position of the valve spindle.Simple installation through automatic tune function and setting through DIP-switch:• Close tight function• Characteristic curves selection • Reversal of effective direction• Switching manual /automatic operation • Binary inputAdditional parametrisation options are possible through DTM devices.A software interface can be used for, amongst others, linearisation of the operation character-istics by using free programmable fi xed points. The valve position indication is shown through LED components.As an option an analogue position feedback can be integrated.Type 8694 can be combined with…• Compact stainless steel design• Integrated valve position registration • E asy start-up• Binary input• Analogue feedback (option) • Internal control air channelTechnical data Material Body Cover SealingPPS, stainless steel PC EPDMPower supply 24 VDC +/- 10%Ripple10%, no technical direct current!Setpoint setting 4 to 20 mA Output resistance 180 ΩControl medium Dust concentration Particle densityPressure condensation point Oil concentrationneutral gases, air DIN ISO 8573-1Class 5 (<40μm particle size)Class 5 (<10mg/m 3)Cass 3 (<-20°C)Class 5 (<25mg/m 3)Ambient temperature 0 to +60°CPilot air ports Push-in connector (external Ø 6 mm or 1/4") or threaded ports G1/8Supply pressure Low air fl ow rate 0 to 7 bar 1)High air fl ow rate 3 to 7 bar (in preparation)Air input fi lter Exchangeable (mesh aperture~0.1mm)Actuator system Actuator series 23XX Actuator series 27XX Low air fl ow rate: Ø Actuator 70 / 90 mm Low air fl ow rate: Ø Actuator 80 / 100 mm High air fl ow rate: Ø Actuator 125 mm (in preparation)Position detection module Contact-free, wear-freeStroke range valve spindle 3 to 28 mm (47 mm on request)Installationas required, preferably with actuator in upright position Protection class IP 65/67 according to EN 60529 (NEMA4x in preparation)Power consumption < 3.5 WElectrical connection Multipole connectionCable gland (in preparation)M12 (8-pins), stainless steel1xM16x1.5 (cable-Ø5-10mm), terminal screws (1.5 mm 2) Protection class 3 according to VDE 0580Type of protection II 3 G nA II B T4 (in preparation)II 3 D tD A22 T135° (in preparation)Conformity CE acc. to EMV2004/108/EGOptions Analogue position feedback, 4-20mA ApprovalCSA (in preparation)CommunicationAS-Interface (option, in preparation)1) The supply pressure has to be 0,5 - 1 barabove the minimum required pilot pressure for the valve actuator.Ordering information for TopControl-Control valve systemsA complete TopControl-Control valve system consists of a TopControl Basic Type 8694 and a process valve Type 23XX or 27XX . The following information is necessary for the selection of a complete control valve:•Item no. of the Positioner TopControl Basic Type 8694 without process valve, see ordering chart on p. 3•Item no. of the desired process valve Type 23XX or 27XX (see separate datasheets, e.g. 2300, 2301 or 2702, 2712, 2730)•Note: TopControl-Control valve systemWhen you click on the orange box "More info." below, you will come to our website for the resp. product where you can download the datasheet.Valve systemContinuous Classic Type 8802-YC-L 2702 + 86942301 2300 2702 Globe control Angle-seat Angle-seat valve control valve control valve-I -I Valve systemContinuous ELEMENT Type 8802-YG-L 2300 + 8694Ordering chart Type 8694(other versions on request)Ordering chart accessoriesApprovals CSA&URTHERôVERSIONSôONôREQUESTOrdering chart adapter kit(has to be ordered separately)in preparationin preparationDimensions [mm]Mounting on process valve Type 27xxMaterials1Cover PC2Body casing Stainless steel 3Basic body PPS4Plug M12 Stainless steel 5ScrewsStainless steel 6Push-in connector Threaded ports G1/8POM/stainless steel Stainless steel 7SealingEPDMSignal flow diagram Position control loopTopControl Basic functions• Automatic start of the control system• Linear or progressive characteristic curvesselection (DIP-switch); free programmableover Software interface• Close tight function• Reversal of effective direction of the setpointsignal• Switching manual / automatic operation• Binary input (controller enable)• Parametrisation of the device through DTM Schematic diagram of the TopControl Basic1) The operating voltage is supplied with a 3-wire unit independent from the setpoint signal.Connection optionsConnection MultipoleTo fi nd your nearest Bürkert facility, click on the orange box In case of special application conditions,please consult for advice.Subject to alteration.© Christian Bürkert GmbH & Co. KG0906/3_EU-en_00895044。
L1070和L1071轨迹定位器说明书

L1070 and L1071Portable LocatorI Multiple frequencies ITransmit/receive frequency (815 Hz, 8 kHz, 82 kHz)I SONDE supportI Peak and null detection I Passive 60 HzIMeasures current flow in buried conductorsI Transmitter variable output power levels IPush-button depth measurementDESCRIPTIONUnparalleled in capability, the L1070 and L1071 Portable Locators locate buried cable and pipe in various situations. Capable of locating long or short ranges,inductive or conductive, active or passive, the units deliver quick and accurate results with a user-friendly interface.Whereas the L1070 uses a disposable battery type, the L1071 requires a rechargeable one.Operating the receiver at multiple frequencies optimizes performance for the specific needs of the user. Lowfrequency of 815 Hz provides longer range and reduced errors from adjacent cables, ideal for electric powerservices. High 82 kHz frequency will path locate past bad telephone bonds, locate underground stubs and permit inductive locating with either the optional flexible coupler or direct soil induction. A special design feature on both units allow the user to select and compare receiverinformation on two frequencies simultaneously, without having to return to the transmitter. Excellent passive 50/60Hz locating will pinpoint active power lines and other utilities where AC is present without the use of the transmitter.The portable locator also features SONDE detection and locating. By selecting this feature, the user is able tochoose a SONDE that will match the same frequency and the receiver.APPLICATIONSFlexibility remains the key strength of reaching difficult,multi-point, grounded utility locating bining high power at low frequency virtuallyeliminates the false coupling into adjacent objects and allows the high transmitter power to burn a signal pastseveral grounds and into multiple distributed grounds.Multi-grounded electrical distribution service, continuously grounded water pipes, multi-grounded telephone shield wiring, highly capacitive, cathodically protected coated gas pipes and CATV systems all benefit from the flexibility of the L1070 and L1071.Conductor current readout on the units give the userinformation on the amount of current flowing on the target conductor with correction for changes in depth. To trace the direction where the transmitter signal is divided or where it goes into the soil at an insulation ground fault,press the CURRENT button. This feature is useful in cathodically protected systems with ground faults.An optional ground return probe allows ground fault detection on unshielded electric services or sheath faults on telephone services through the technique of voltage gradient.FEATURES AND BENEFITSI Multiple transmit/receive frequencies provide accurate long or short range locates.IPush-button depth measurements up to 15 ft (4.6 m)quickly identify service depths prior to digging.IPassive 60 Hz detection serves as an excellent safety feature for identifying live underground primary and secondary utility cables.IAC circuits in common trench situations. Passivedetection also allows convenient locating of energized electric services.IHigh power at low frequency solves the difficult multi-point grounded utility locating problem.SPECIFICATIONSTransmitterOperating Frequency:82 kHz, 8 kHz, 815 Hz, and BOTH (815 Hz/82 kHz) simultaneouslyIndicatorsAC Load Resistance Measurement, Low Bat Indicator, Low Bat warning modulated on output signal every 20 secondsLoad Matching:Automatic from 5Ωto2000ΩOutput Power815 Hz and 8 kHzNormal0.6 WHigh 2.0 W82 kHzNormal0.2 WHigh 1.0 WBOTH (815 Hz/82 kHz)Normal 0.12 W + .06 WHIGH 1.33 W + 0.67 WBattery TypeDisposable (Used in L1070)Eight 1.5 V D size alkalineRechargeable (Used in L1071)12 V,7Amp-Hour maintenance free,sealed lead-acid includes 120 V ac wall-mount charger for overnight charging. Optional 12 V automotive power pack for fast charging, or powering unit from a vehicle cigarette lighter jack.Battery LifeDisposableContinuous:8to 15 hours depending on load, frequency and power settingIntermittent:40 to 60 hours depending on load, frequency and power setting. 25% duty cycle average.RechargeableContinuous: 10 to 20 hours depending on load, frequency and power settingIntermittent:50 to 70 hours depending on load, frequency and power setting. 25% duty cycle average.Operating Temperature Range-4°to +133°F (-20°to +55°C)Dimensions6.5 H x 6.32 W x 16 L in.(15.2 H x 12.7 W x 40.6 L cm)Weight8lb (3.6 kg) with alkaline D cells11.5 lb (5.2 kg) with rechargeable batteries ReceiverOperating Frequency:815 Hz, 8 kHz, 82 kHz, 50/60~(PASSIVE) Antenna ModeNull-responding vertical coilPeak-responding horizontal coilAudio Indication:Variable pitch response on all frequencies Current MeasurementDisplay indicated relative current simultaneously between any two selected cables for target cable verification in a multi-conductor environmentOperating and Storage Temperature Range-4°to +133°F (-20°to +55°C)Battery Type:Six 1.5 V C size alkalineBattery LifeContinuous:40 hoursIntermittent:82 hoursAuto power shutoff after 10 minutes of nonuseSignal StrengthAnalog LCD Bargraph. Absolute Digital Signal Strength readout from 0 to 999Gain Control:Up/Down button for automatic centering and manual controlManualBubble-level triangulation for verification of automatic readout in congested environments. Note:Accuracy is dependent on site conditions, nonconcentric conductor shape, number of nearby conductors, and soil return currents.Dynamic Range:126 dBDepth MeasurementAutomatic:Push-button 3 digit readout to 15 ft in feet/inches, (optional meter/centimeters to 4.6 m)Dimensions9.4 H x 3.75 W x 30.3 L in.(23.8 W x 9.3 W x 76.9 L cm)Weight:3lb (1.36 kg)UKArchcliffe Road, Dover CT17 9EN EnglandT(0) 1 304 502101F(0) 1 304 207342UNITED STATES4271 Bronze WayDallas, TX 75237-1019 USAT1800 723 2861T1214 333 3201F1214 331 7399OTHER TECHNICAL SALES OFFICESNorristown USA, Toronto CANADA,Mumbai INDIA, Trappes FRANCE,Sydney AUSTRALIA, Madrid SPAINand The Kingdom of BAHRAIN.ISO STATEMENTRegistered to ISO 9001:2000 Reg no. Q 09250Registered to ISO 14001 Reg no. EMS 61597L1070_1071_DS_en_V13Megger is a registered trademark。
Burkert_8035

8035操作手册在线式流量变送器目 录8035流量变送器1引言 (2)1.1拆箱 (2)1.2关于本手册 (2)1.3用户安全责任 (2)1.4电磁兼容性 (2)2规格 (3)2.1型号规格 (3)2.2设计和测量原理 (4)2.3SE35电子模块外型尺寸 (5)2.3技术参数 (6)3安装 (7)3.1安装指导 (7)3.2安装 (8)3.3电气布线规范 (9)3.4电气接线 (9)3.4.1不带继电器输出的SE35接线 (10)3.4.2带继电器输出的SE35接线 (11)3.4.3SE35脉冲信号输出至PLC接线 (11)3.4.4230/115 VAC电源的SE35接线 (12)3.4.5舌簧继电器输出的SE35接线 (13)3.4.6230/115 VAC电源1 引言安装或使用本产品前1.1拆箱请确认产品的完整性和无破损1 SE35型变送器电子模块1 S030型操作手册如有缺少或损坏1.2关于本手册本手册不包括任何保证条款只有经过培训的人员才能安装和请与贵地区的宝得分销商联系同时每个产品都设计为可工作在多种应用场合正确安装并维护所有的部件该符号在手册中出现时表示涉及有关安全安装1.4电磁兼容性本产品符合89/336/EEC 欧共体理事会的E M C-规范必须按说明接线这样能使您充分地享受本产品的优越性2 规格8035流量变送器2.1变送器型号规格8035型流量变送器包括一个容纳涡轮的S030接头和一个专门设计为安装在接头上的SE35型电子模块国际标准电气接口订货号变送器12-30VDC 电源2继电器舌簧继电器脉冲输出DIN43650 PG9PG13,52 x PG 13,52 x PG 13,5423915 F 123916 G 423918 J 423919 K变送器12-30VDC 电源2继电器舌簧继电器脉冲输出2 x PG 13,52 x PG 13,52 x PG 13,5423922 E 423924 G 423925 H 北美标准电气接口订货号变送器12-30VDC 电源2继电器舌簧继电器脉冲输出G1/22 xG1/2423927 B 423928 L 423930 J 423931 F变送器115-230VDC 电源2继电器舌簧继电器脉冲输出2 xG1/22 xG1/22.2设计和测量原理8035型流量变送器是由一个SE35型电子模块通过旋转90µç×ÓÄ£¿é°üÀ¨´øÏÔʾÆ÷µÄµç×Ó°å涡轮装在接头内输出信号由一个4针插座或一个PG13.5(不带继电器式)或两个PG13.5(带继电器式)提供4个插在涡轮上的磁铁旋转并在8035发送器中产生一个测量信号一个对应于具体管道(管径和材质)的系数将该频率转换成流量单位为脉冲/升)可在在线式接头(S030)的操作手册中查得需要124¿É´ø¾§Ìå¹Ü¼¯µç¼«¿ªÂ·NPN/PNP脉冲输出或舌簧继电器脉冲输出(选项)ÏÞÖµ¿É×ÔÓɵ÷Õû(带舌簧继电器选项的无此功能)8035流量变送器测量的最小流速为0.3米/秒(1.0英尺/秒)2.3SE35型电子模块外型尺寸与连接方式和接头图2.1 SE35电子模块外型尺寸2.4技术参数管径测量范围流量范围塑料接头压力等级流体最高温度金属接头压力等级流体最高温度环境温度贮存温度相对湿度外壳防护等级测量误差线性度重复性显示器传感器支架涡轮轴和轴承电子壳体电源输出信号负载脉冲输出舌簧继电器输出继电器输出(选项)(*)标准条件下环境温度和水温均为20to 2(132(176(2120 to 6080%IP651.在线校正(示教功能)15段PPSS 316L(1.4404),BrassPVDF陶瓷; O 型环:氟橡胶聚碳酸脂; 前面板薄片:聚脂12-30VDC (可选115/230 VAC)4...20 mAmax.900at 24V;max.100at 115/230 VAC集电极开路NPN 和PNP0...30V,100mA,保护打开取决于流量(最小0.1秒0.2A)2个继电器220 VAC3 安装3.1安装指导测量误差(参见1%注意压力-温度特性与相应的接头材质有关即管内必须无气泡存在该仪表必须防止长期的热辐射及其他如直接暴露在阳光下等环境影响根据管路设计或者采用流量调节装置以获得最好的测量精度请参阅EN ISO5167-1ºÏÊʵĹܾ¶°´¸½Â¼ÖеÄͼѡÔñ(参见图3.1)整套仪表适用范围3.2 工艺安装采用专门设计的S030接头系统8035流量变送器3 安装1.必须根据3.1的安装规格将接头 1 装入管道将电子 壳体 2 装在接头上图 3.2 8035型流量变送器安装图注意:为抗干扰该点必须在现场接到一个良好的接地点上绝对不能与高压高频线混合布线则应至少隔开30厘米或采用同轴电缆一般情况下如无把握必须采用高质量的电源(经过滤波和调整的)2.从外罩 中取出触头块 4.装回去时装入绝缘横载面积最大1.5mm2打开插座按以下说明接线:L+(12-30 VDC)脉冲输出3.4.1不带继电器输出的SE35接线打开盖(12-30 VDC)3:L-4:接地(接地柱)5:脉冲输出-6:脉冲输出+线圈式霍尔式接传感器接PG13.5电缆接头不带继电器输出的SE35变送器电子模块的电流输出可以很方便地接到任何类型的PLC(参见图3.5)3.4.2带继电器输出的SE35接线确保通过两个电缆接头接线通过PG13.5拉出电缆并按以下端子分配接线(图3.6):1:4-20mA 电流输出2:L½«µç·°åÉϵĿª¹Ø 1 置于A 位或B 位(图3.6和3.7)ÔòӦȥµôÌøÏß(1-3)(参见图3.6)ÔòÓ¦½«¿ª¹Ø 1 拨到A 位(见图3.7)并短路1-3(图3.6)图3.6带继电器输出的SE35端子分配图3.7带继电器跳线(4-20mA 输出)线圈式霍尔式接传感器开关 1A 位开关B 位开关3.4.4115/230 V AC 电源的SE35(选项)接线打开变送器的盖通过PG13.5拉出电缆并按图3.8接线脉冲和继电器)的接线与12-30 VDC 变送器的接线相同则应将开关1拨到A 位(见图3.7)并短路1-3(图3.6)参见3.4.2 )开关 1 在A位3.4.5带舌簧继电器输出的SE35接线确保通过两个电缆接头接线通过PG13.5拉出电缆并按以下端子分配接线(图3.9):1:4-20mA 电流输出2:L½«µç·°åÉϵĿª¹Ø 1 置于A 位或B 位(图3.9和3.10)ÔòӦȥµôÌøÏß(1-3)(参见图3.9)4-20mA 输出的SE35连接至PLC跳线(4-20mA 输出)线圈式霍尔式接传感器开关 1A 位开关B 位开关SE35舌簧警告:如不采用4-20mA 输出3.4.6115/230 V AC 电源舌簧继电器输出的SE35(选项)接线警告:如不采用4-20mA输出打开变送器的盖通过PG13.5拉出电缆并按图3.11接线和舌簧继电器脉冲)的接线与 12-30VDC 变送器的接线相同舌簧继电器输出的SE35电气连接带舌簧继电器输出的SE35接传感器跳线(SE35舌簧电源选择开关115/230VAC8035变送器根据三个菜单进行操作输出电流该菜单中还可进行辅累加器复位如语言K 系数脉冲输出该菜单中B) 参数设定菜单该菜单中进行模拟测试量程)4.2操作模式显示操作模式下显示:辅累加器值用单位后面的一点将其与主累加器相区分4.3校正模式:同时按 5秒在参数设定菜单中可设置以下变量:返回操作模式并贮存新的参数(见校正菜单)ÓëËùÑ¡²âÁ¿·¶Î§µÄÁ÷Á¿³É±ÈÀý复位要在校正菜单中进行德语选择流量和累加器显示的工程单位根据图表输入K 系数或用在线校正确定K 系数确定4-20mA 对应的测量范围脉冲输出参数设定(单位和数量)或设定舌簧继电器脉冲输出(单位和数量)继电器参数设定(舌簧继电器输出时无此信息)阻尼选择4.3.1语言4.3.2工程单位流量可用02或3位小数注意:只有通过子菜单才能返回主菜单4.3.3K 系数在该菜单项中输入接头(参见S030操作手册)的K 系数在线校正用户只要通过系统运行一个已知的流量即可用户要灌满一个100升的桶TEACHYES°´Ï»سµ¼ü¿ªÊ¼²âÁ¿FILLENDµ±Í°¹àÂúʱ°´»Ø³µ¼üÍ£Ö¹²âÁ¿确认后即显示计算出的K 系数 单位同流量显示所计算出的K 系数4.3.4输出电流 输入对应于 4-20mA输出的流量测量范围前一个值可以大于后一个值采用先前选择的用于流量显示的参数(工程单位和小数点)电子线路内部故障时注意:本仪表使用最新确认的K 系数4.3.5脉冲输出该菜单项中先输入单位例如:一个脉冲对应于5m3ÿ¸ö¼ÌµçÆ÷¶¼ÒªÉèÖÃÁ½¸ö¼«ÏÞÖµ:1-和1+或2-和2+µ¥Î»ºÍСÊýµãͬ菜单中所选1+2+4.3.7滤波器功能该子菜单设置阻尼有十档阻尼可选FILTER 0RELAYFILTER1-= 00001-= 0008ENTER1+= 00002+= 0044ENTERENTER2-= 00002-= 0040ENTER2+= 0000ENTERENTER1+= 0010ENTERFILTER TOTALENTERENTERFILTER 0FILTER 94.3.8累加器该菜单可设置主辅累加器复位END4.4测试菜单:同时按 5秒测试菜单中可进行下列补偿和测试需要用电流表OFFSET±äËÍÆ÷Ó¦²úÉú4m A输出信号键入测得的值校正之如有错误O F F S ET必须输入新的值输出将根据该输入值起作用4.4.2量程补偿校正20mA 基本设置的选项当显示时按ENTER键如该值不正确在用户进入其它子菜单前键入测得的电流值4.4.3频率显示显示传感器频率4.4.4流量模拟该菜单可模拟一个流量虽然该模拟值影响电流输出和继电器输出但不影响脉冲输出U N ITÊäÈëÁ÷Á¿Öµ5.1变送器电子模块S E35出厂设置4mA:00.0020mA:00.00单位:1PU:000.10无FILTER 2英语l/s 12位46.6语言:流量单位:累加器单位:小数点:K 系数:电流:脉冲输出:继电器输出:滤波器:变送器电子模块SE35用户4mA:20mA:单位:PU:FILTER语言:流量单位:累加器单位:小数点:K 系数:所用接头:电流:脉冲输出:继电器输出:滤波器:在正确安装的情况下如运行过程中有污染或堵塞轴承等)ERROR°´ENTER键进入操作菜单变送器必须重新校正请将变送器退还给供应商5.3备品备件SE35型变送器电子模块脉冲输出)带螺钉的盖护板和印刷电路板带继电器和软件F4的变送器带螺钉的盖举例-易连接12-30VDC´ø¶¨Î»Æ÷µÄµ÷½Ú·§Âö³åÊä³ö½ÓÏß1067型定位器举例-易连接12-30VDC´ø¶¨Î»Æ÷µÄµ÷½Ú·§1067型定位器先导阀电磁阀通径40选择举例:规格:流量:理想流速:所需内孔:10m 3/h 2-3m/s1)流速图(流量l/min流速m/s )流 量流 速通径1 1/2”选择举例:规格:流量:理想流速:所需内孔:50加仑/分8英尺/秒2)流速图(流量US 加仑/分。
PBD7- PBA7-系列精密台秤安装手册说明书

安装手册恭喜您选择了 METTLER TOLEDO 的品质与精密。
如果您能够依照用户手册正确使用新设备,并且由我们厂商培训的服务团队进行定期校准和维护,本设备将能可靠与精确地运行,保证您购买的产品物有所值。
如需了解按照您的需求和预算量身订制的服务协议,请联系我们。
欲知详情,请登陆/service。
为了让您购买的设备发挥最高性能,须注意下列几点:1. 注册您的产品:欢迎您在 /productregistration注册您的产品,以便我们通知您与产品有关的增强功能、更新及重要通知。
2. 如需服务,请联系 METTLER TOLEDO:量具的价值与其精确度成正比——不合规格的量具会降低品质、减少利润并增加责任风险。
METTLER TOLEDO 及时的服务能够保证精确,延长设备的运行时间及使用寿命。
–安装、配置、集成与培训:我们的服务代表均为厂商培训的称重设备专家。
我们承诺我们的称重设备能够经济并及时地生产,并且我们的员工训练有素。
–初次校准文件:每个工业秤都有其独有的安装环境及应用要求,所以需要对运行情况进行测试和验证。
我们的校准服务及验证文件精确无误,保证了生产质量,并能提供良好的系统运行记录。
–定期校准维护:校准服务协议让我们对于您的称重程序和遵守规程证明充满信心。
我们提供多样化的服务计划,专为您的需求和预算而定制。
2 PBD7- / PBA7-系列 30403591A目录1 防爆区域作业安全注意事项 (4)2 安装 (6)2.1 准备工作 (6)2.2 设置 (6)2.3 调整至水平 (7)2.4 延长并安装连接电缆 (8)2.5 危险区域中的等电位连接 (8)2.6 将秤体连接至称重仪表 (10)2.7 调试 (10)3 配置可能性 (11)3.1 通用信息 (11)3.2 原厂设定的配置数据 (12)4 装配规划 (13)4.1 规划注意事项 (13)4.2 预负荷范围 (13)4.3 安装可能性 (14)5 尺寸 (17)3 30403591A PBD7- / PBA7-系列1 防爆区域作业安全注意事项 ▲PBD7- / PBA7-系列精密台秤为 Category 3 危险区域(燃气和灰尘)提供选项。
1067 定位器原版说明书
1067POSITIONER TYPE 1067E-1-TABLE OF CONTENTS1INTRODUCTION................................................................................................................E-2 1.1Unpacking and inspecting..................................................................................................E-2 1.2General notes on use and safety.......................................................................................E-2 1.3Electromagnetic compatibility............................................................................................E-22DESCRIPTION...................................................................................................................E-3 2.1Characteristics and possible applications.........................................................................E-3 2.2Construction.......................................................................................................................E-5 2.3Principle of operation.........................................................................................................E-6 2.4Safety position....................................................................................................................E-7 2.5Technical data....................................................................................................................E-83INSTALLATION.................................................................................................................E-9 3.1Construction and assembly................................................................................................E-93.1.1 Fitting the positioner to a continuous valve with membrane drive (NAMUR)..........E-93.1.2 Fitting the positioner to a type 2031 continuous valve with piston drive...............E-113.1.3 Fitting the positioner to a continuous valve with rotary drive.................................E-13 3.2Fluid ports.........................................................................................................................E-14 3.3Electrical connections......................................................................................................E-15 4OPERATION....................................................................................................................E-164.1Controls and indicators....................................................................................................E-16 4.2Operating levels...............................................................................................................E-17 4.3Setting up.........................................................................................................................E-18 4.4Process control.................................................................................................................E-194.4.1 Meaning of LEDs and keys in the process control level........................................E-204.4.2 Displays...................................................................................................................E-20 4.5Configuration....................................................................................................................E-214.5.1 Additional functions.................................................................................................E-214.5.2 Configuration menu.................................................................................................E-224.5.3 Function of keys in the configuration level.............................................................E-254.5.4 Notes on the basic and additional functions..........................................................E-25 4.6Manual operation without power supply..........................................................................E-34 4.7Structure of the positioner................................................................................................E-35 5MAINTENANCE...............................................................................................................E-36 Fault messages................................................................................................................E-36APPENDIX.......................................................................................................................E-37 A1: Characteristics of PID controllers..............................................................................E-37 A2: Rules for adjusting PID controllers............................................................................E-39 A3: Optional board for analog position indication............................................................E-44 A4: Optional board for binary position indication/Booster...............................................E-45E-2-1067POSITIONER TYPE 10671 INTRODUCTIONDear Customer,We congratulate you on the purchase of our positioner type 1067. You have made a good choice. To be able to make the best use of the many advantages the product has to offer, it is absolutely necessary to follow our advice and READ THESE OPERATING INSTRUC-TIONS CAREFULLY BEFORE FITTING THE UNIT AND PUTTING IT INTO SERVICE1.1 Unpacking and inspecting Please check the delivery for completeness and transportation damage. The standard delivery includes:-1 Positioner 1067 Ref 642292A-1 Operating Instructions ManualIn the event of loss or damage please contact your Bürkert Subsidiary.1.2 General notes on use and safetyThis publication contains no warranty statement For this we refer to our general purchase and delivery conditions.To ensure proper functioning and a long life of the positioner, the user must observe these Operating Instructions as well as complying with the installation conditions and permissible data as given in the data sheet. Installation and maintenance personnel must have training and qualifications suitable for the task.Suitable measures are to be taken to prevent unintentional actuation and the resulting effect on the process. Safe electrical isolating and shut-off devices for the media must be provided for the installation task. If the positioner is part of a complex automated system, a defined and controlled restart of the automated system after an interruption shall be guaranteed in accordance with the instructions.The accident and prevention safety regulations for electrical equipment shall be complied with during the operation, servicing and repair of the positioner.Repairs may only be carried out by authorised trained personnel.This symbol is shown in the OperatingInstructions each time particular careis required to ensure correctinstallation, functioning and operating safety of the equipment.1.3 Electromagnetic compatibility This device conforms to the EMC-Directive of the Council of European Communities 89/336/EEC.In order to comply with this directive, the wiring instructions must be followed.Master codeUnauthorised operation can be prevented at the various operating levels by a freely-selectable user code. Independent of this, there is a fixed, programmed master code which cannot be changed, by means of which all operations can be performed. This four-digit master code is given on the bottom margin of this page. It can be cut out and kept separately from these Operating Instructions.Master code:6568!1067POSITIONER TYPE 1067E-3-2 DESCRIPTION2.1Characteristics and possible applications (overview)The type 1067 positioner is an electropneumatic position controller for pneumatically actuated continuous valves. The device includes the following main functional groups: a feedback/positional transducer, an electropneumatic system and a microprocessor electronic system. The feedback/ positional transducer measures the actual position of the continuous valve. The microprocessor electronic system continuously compares the actual position (actual value) with a desired position value that was preset via the standard signal input and supplies the result to the position controller. If an error exists, the electropneumatic system causes the actual position to be appropriately corrected. The type 1067 positioner can be fitted to various continuous valves (e.g. valves with piston, membrane or rotary drives and with single or double action). Two variant forms of the basic device are offered that differ in their fixing options and feedback/positional transducers. In variant 1, an internal feedback/ positional transducer is used that takes the form of a rotary potentiometer. In variant 2, an external linear potentiometer serves as feedback/positional transducer.The positioner also implements a PID controller by means of which, in addition to position control, process control (e.g. level, pressure, flow or temperature control) can be achieved in the form of sequence control.A liquid-crystal display and a keypad with three keys are provided for operating the positioner. An operating concept with the following graded operating levels has been implemented:- Process operationThis level allows switching between automatic and manual operation, and enables manual actuation. - ConfigurationConfiguration level is used to specify certain basic functions when the positioner is taken into service and, if necessary, to configure additional functions.E-4-1067POSITIONER TYPE 10672 DESCRIPTIONFig. 1 Block diagram of the type 1067 positionerPositioner type 1067Input for process actual value4...20 mAInput for position or process setpoint0...10 V 0...20 mA 4...20 mA 24 VDCBinary input (contact)Analog output (option)RS 232 (option)RS 485 / PROFIBUS (option)OperationCharacteristics, functionsI n p u t sP o w e rO u t p u tI n t e r f a c e sPosition controller with additional functions, e. g.- close tight function - plug travel limitation - setting speed limitation - split range- correction characteristics - deadband- safety positionAdditional integrated processcontroller with the following features:- adjustable parameters - scalable inputs- setpoint setting via input signal or keysAutomatic adaptation of position controller to the continuous valve in useHierarchical operating concept for simple, staged-level operation1067POSITIONER TYPE 1067E-5-2 DESCRIPTION2.2 ConstructionThe positioner consists of the following main assemblies:- Body and bonnet (aluminium)- internal feedback/positional transducer for measuring valve position - Microprocessor/electronic unit for signal processing and control - Solenoid valves for control of a continuous action valve - Fluid plate with fluid ports - Terminals and cable glands - Display and keyboardFig. 2 Cross section of the positioner with internal feedback/positional transducerConnection terminalManual operationCable glandDisplay and keypadFluid plateFluid portsSolenoid valveAluminium body and bonnet with hingeElectronicIn variant 2, an external linear potentiometer serves as feedback/positional transducer (see fig. 3).Fig. 3 External feedback/positional transducerPositionaltransducer shaftInternal feedback/positional transducer for connection according to NAMURE-6-1067POSITIONER TYPE 10672 DESCRIPTION2.3 Principle of operationFig. 4 shows a operational diagram of the positioner with its relationship to a piston drive control valve.An external feedback/positional transducer is used in this case to measure the actual position.Fig. 4 Operational diagramPiston valveAir inlet Solenoid valvesAir exhaustPositioncontrollerSetposition Process value (Pressure, flow, level...)SensorProcess controllerThe position (actual position) of the valve drive is determined by the feedback/positional transducer.The signal corresponding to the actual position is continuously compared in the positioner with the desired position and the error (control deviation) is formed. Pulses of variable duration corresponding to the error are delivered to the magnetic valves of the electropneumatic system, by means of which the supplied air and outgoing air for positioning the actuating drive of a continuous valve are controlled.The desired position can be preset either via a standard signal input from outside (e.g. manually or via an external controller) or via the internal process controller. In the latter case, the desired process value is applied to the standard signal input or entered via keypad and a comparison is made with the process quantity (e.g. flow, pressure, level or temperature) that is to be controlled (Fig. 4).If the desired position is preset externally via the standard signal input provided for that purpose (i.e.if the internal process controller is not used), the device works as a position controller only (Fig. 5).The position controller is implemented as a PD controller within the microprocessor. A pulse-width modulation (PWM) member is connected to the controller output and, via its B 1 and E 1 outputs, the magnetic valves for supplying air to and venting the actuating drive are controlled. When a positive error exists, pulses (PWM signals) are output from output B 1 to switch the supplied air. When a negative error exists, pulses are output from output E 1 to switch the outgoing air.The positioner can be supplied for both single-acting and double-acting actuating drives. The PWM member has two further outputs, B 2 and E 2, via which the two additional magnetic valves for supplying air to and evacuating air from double-acting actuating drives are controlled.If the internal process controller is used, it constitutes a component in a higher-level control loop (main control loop). The position controller mentioned above now operates in a lower-level auxiliary control loop. The overall effect is sequence control (Fig. 6). The internal process controller (main controller) is implemented as a PID controller (Z1 and Z2 representing disturbance variables).Feedback/positional transducerActual-position External setpointProcess setpoint1067POSITIONER TYPE 1067E-7-2 DESCRIPTIONFig. 5 Position controlPosition controller Valve actuatorPWM element Setposition Fig. 6 Process controlProcessAuxiliary control loopMain control loopSetposition 2.4 Safety positionIn the event of power failure, the functioning of the actuator ensures that a pre-determined end position is adopted (opened or closed by spring pressure).Process controllerPosition controller PWM-element Valve actuatorE-8-1067POSITIONER TYPE 10672 DESCRIPTION2.5 Technical dataElectrical data Power supply:24 VDC Power consumption:< 10 W Input for desired valueInput for setpoint for position or process control:- Unit signal 4 ... 20 mA - Unit signal 0 ... 20 mA - Unit signal 0 ... 10 VInput for process signal (in case of process control):- Unit signal 4 ... 20 mABinary input:Can be configured as a normally open or normallyclosed contact.Terminations: 1.5 mm 2 bolted terminalsTwo PG 9 screwed glandsPneumatic data Control medium:filtered compressed dry air, oiled or non-oiled Pressure range:0 ... 6 bar Air rates Inlet valve:23 Nl / min (1)Exhaust valve:25 Nl / min (1)Air consumption by unit in stable state:0 Nl / min Unions:G 1/8" internal thread (1)When pressure reduction from 6 to 5 barMechanical dataRegulation range of internal path-measuring system:lift turn: 10...80 mmrotary movement: 0...180°Regulation range of external path-measuring system:lift turn: 0...50 mm Process controller dataProportional correction value KP:0...99,99Reset time TN:0.5...999.9Rate time TV:0.0...999.9Operating point:0...100%Installation and operating data External dimensions of positioner :125 mm x 80 mm x 80 mm (W x H x D)Material of body:Aluminium, lacquered Material of the fluid plate:Aluminium, anodised Weight of positioner:Approx. 1 kg Degree of protection:IP 65Operating temperature:0 ... 60 °C1067POSITIONER TYPE 1067E-9-3 INSTALLATION3.1 Construction and assemblyThe type 1067 positioner can be fitted to various continuous valves. Depending on the valve type either variant 1, with an internal feedback/positional transducer (a rotary potentiometer) or variant 2,with an external feedback/positional transducer (a linear potentiometer) is used (see section 2.3).Main dimensions:Positioner External feedback/positional transducer Width:125 mmDiameter:approx. 65 mm Height:80 mm Height:approx. 95 (115) mmDepth:80 mm3.1.1 Fitting the positioner to a continuous valve with membrane drive (according to NAMUR)ArrangementIn the case of a continuous valve with membrane drive, device variant 1, with an internal feedback/positional transducer (a rotary potentiometer) should be used. The positioner is screwed on to what is termed the «lantern » of the membrane drive (Fig. 7). Transmission of the valve position to the internal feedback/positional transducer is achieved by means of a lever conforming to NAMUR (Fig. 8).AssemblyA mounting elbow (Fig. 10) is provided for assembling variant 1 of the positioner to a continuous valve with membrane drive (e.g. Type 265). The following steps should be carried out:Screw mounting elbow Ẅ to the positioner using 4 x M6 Ẅẖ screws.Fasten pin ẅ using washer Ẋ and nut ẋ to that position of the lever ẇ which corresponds with the desired lift (the lever is marked in mm of lift).Put lever ẇ with pin on to the path-sensor shaft of the positioner so that the marking on the shaft points towards the pin on the lever. Then screw lever tight with screw Ẍ. Fasten carrier Ẇ with cheese-head bolts ẉ to the lifting rod of the membrane valve.Fig. 7 Fitting to a type 265 continuous valve with membrane driveFig. 8 Rear view of positioner (variant 1) with leverE-10-1067POSITIONER TYPE 1067Fig. 9 Position of lever during assembly3 INSTALLATIONSet positioner, with the mounting elbow Ẅ screwed on to it, on the membrane drive so that the pin ẅ slots into the carrier Ẇ, the point of the lever runs parallel with the upper edge of the positioner (Fig. 9) and the rear side of the positioner runs parallel with the carrier Ẇ. Fasten the positioner to the membrane drive in this position as appropriate to the following variants:-In the case of membrane drives with pillar lanterns, fasten mounting elbow Ẅ with two U-bolts Ẉ,nuts ẄẆ and washers Ẅẅ to the appropriate pillar lantern (Fig. 10a).-In the case of membrane drives with cast lanterns, fasten mounting elbow Ẅ with one screw ẄẆ(Fig. 10b) or four screws ẄẆ (Fig. 10c) to the appropriate cast lantern (Fig. 10a).Fig. 10Assembly of positioner to a continuous valve with membrane driveParallel1067POSITIONER TYPE 1067E-11-Fig. 11 Fitting to a type 2031 continuousvalve with piston drive Fig. 12 Rear view of positioner (variant 2)AssemblyAssembly of variant 2 of the positioner to a type 2031 continuous valve with piston drive.A set of add-on parts (NAMUR adapter, Fig. 13) is provided for assembling variant 2 of the positioner to a piston valve (e.g. type 2031). It consists of a mounting plate Ẅ, two hollow bolts ẅ, three O-rings Ẇ and two cheese-head bolts M5 ẇ.To assemble the positioner on a type 2031 continuous valve with piston drive, the following steps should be carried out (Fig. 13):Place an O-ring Ẇ in the recess of the mounting plate Ẅ (drive side). In the case of a large version,place a second O-ring on the other side of the mounting plate.Put two cheese-head bolts M5 ẇ from the drive side through the 5-mm drillings in the mounting plate.Screw the preassembled mounting plate Ẅ to the two connection pieces of the valve drive with two hollow bolts ẅ so that the lower connection piece is sealed by the O-ring.Place an O-ring Ẇ in the groove on the reverse side of the positioner.Add the positioner to the mounting plate and screw it on with the two cheese-head bolts ẇ.Assembly of the external feedback/positional transducer to a type 2031 continuous valve with piston drive.To assemble the external feedback/positional transducer, the following steps should be carried out (Figs. 13 and 14):Check that an O-ring Ẇ has been put into the valve drive (top). Insert O-ring if necessary.3 INSTALLATION 3.1.2 Fitting the positioner to a type 2031 continuous valve with piston drive ArrangementIn the case of a continuous valve with piston drive, variant 2 with the external path-measuring system (Fig. 3) should be used. The positioner is placed on the valve and screwed to it (Figs. 11 and 12). The valve position is transmitted directly via the spring-mounted rod of the path-measuring system (the linear potentiometer).E-12-1067POSITIONER TYPE 1067Fig. 14 External feedback/positionaltransducer3 INSTALLATION Set of add-on parts forB ürkert piston drive (ø125)ẈẉSet path-measuring system directly on the drive from above. Great care must be taken to ensure that the spindle of the path-measuring system is seated on the spindle of the drive.Screw in the path-measuring system and secure with spanner.Loosen setscrew ẉ and turn feedback/positional transducer so that the cable outlet is in the desired position. Retighten setscrew.Unscrew lid of path-measuring system. Remove PG-threaded joint Ẉ from the housing of the path-measuring system. Lead the plug of the positioning cable Ẋ through and plug it into the housing of the path-measuring system (green to green, white to red, brown to yellow). Draw surplus cable inwards, tighten PG threaded joint. Screw lid back on (O-rings).Fig. 13Diagram for the assembly of positioner and external path-measuring system to a Type 2031 continuous valve with piston drive (conforming to NAMUR)1067POSITIONER TYPE 1067E-13-Fig. 15Fitting to a continuous valve withrotary drive Fig. 16Reverse side of positioner (variant 1)with securing holes3 INSTALLATION AssemblyA coupling (adapter) Ẅ is provided for assembling variant 1 of the positioner on to a continuous valve with a rotary or part-turn valve actuating drive (e.g. Type 3210, Fig. 17). In addition, an assembly clip Ẇ (Fig. 18) is required and can be obtained from the manufacturer of the part-turn valve actuating drive. (It is normally used for the assembly of a limit-switch box).To assemble, the following steps should be carried out (Fig. 18):Secure the assembly clip Ẇ to the valve drive.Place the coupling Ẅ on the shaft of the positioner ’s feedback/positional transducer. The setscrew ẅ on the coupling should first have been slightly withdrawn.Place the positioner on the assembly clip. Ensure that the flat piece of the coupling fits into the slot in the end of the drive shaft.Secure the positioner on the assembly clip with 4 x M6 screws.Fix the coupling to the shaft of the feedback/positional transducer by screwing in the setscrew ẅ.If after the AUTOTUNE function is started the message TURN POT is displayed on the LCD, the setscrew must be loosened and the shaft of the path-measuring system rotated 180° relative to the drive. The setscrew should then be screwed tight and the AUTOTUNE function repeated.3.1.3 Fitting the positioner to a continuous valve with rotary driveArrangementIn the case of a continuous valve with rotary or part-turn valve actuating drive, variant 1 with an internal feedback/positional transducer should be used. Its shaft is coupled to the valve rotary drive (e.g. flap valve). The position of the rotary drive is thus transmitted directly to the shaft of the feedback/positional transducer.E-14-1067POSITIONER TYPE 10673 INSTALLATIONFig. 17Coupling for continuous valve withrotary drive Fig. 18Assembly of positioner on to a continuous valve with rotary driveContinuous valve with rotary driveSingle acting Double acting Single acting, parallel(for higher flow)3.2 Fluid portsConnect P port with compressed air supply (6 bar max.)1067POSITIONER TYPE 1067E-15-3 INSTALLATION3.3 Electrical connectionsFig. 20 Assignment of terminals Input U1 (unit signal 0 ... 10 V):Input resistance 200 k ΩInput I1 (unit signal 0/4 ... 20mA):Input resistance < 175 ΩInput I2 (unit signal 4 ... 20mA):Input resistance < 175 ΩCaution : The PE terminal must be connected to a ground point using the shortest possible cable (max. 30 cm) to ensure electromagnetic compatibility (EMC).Signal input:- either for valve position control- or for processregulation controlBinary inputContactOutput(Option)Power SupplyInput for processregulationE-16-1067POSITIONER TYPE 10674 OPERATION4.1 Controls and indicatorsAUTOTUNE…Arrow up“ key…Arrow down“ key MANUAL/AUTOMATIC keyLED4.2 Operating levels2 operating levels are provided for operation of the positioner:1° Process operation levelThis level, which is automatically set each time the unit is switched on, allows to change over between the MANUAL and AUTOMATIC operating modes. In the MANUAL mode the valve can be opened or closed by operating the …arrow keys“.2° Configuration levelThe purpose of the configuration level is to enable the basic functions to be specified on initial commissioning and additional functions to be configured as required.Each time the power is switched on, the positioner is in the process operation level in the AUTOMATIC mode. A changeover to the MANUAL mode can be accomplished using the MANUAL/AUTOMATIC key (cf § 4.4). From the process operation level it is possible to change over to the configuration level by pressing the MANUAL/AUTOMATIC key and holding for 5 seconds.1067POSITIONER TYPE 1067 E-17-4 OPERATION4.3 Setting upThe following basic settings are to be carried out on the initial setting up (commissioning) of the positioner in conjunction with the 2632 angle-seat control valves (specification of basic functions): -Specification of the positional feedback of the continuous valve to the positional transducer (direct or lever),-Specification of the unit signal input chosen for entering the set position (0 ... 20 mA, 4 ... 20 mA or 0 ... 10 V),-Initiating the automatic adaptation of the actuator to the valve being used.When the power is switched on, the positioner is in the process control level. It is necessary to switch to the configuration level for specification of the basic functions. To do this, press the MANUAL/ AUTOMATIC key and hold for 5 seconds. The first menu point X-SENS of the main menu is then displayed.Fig. 21 Main menu for first setting upFunctionAUTOMATICorMANUALafter 30 to 120 sec.BLINKINGE-18-1067POSITIONER TYPE 10674 OPERATIONTo perform a setting within the X-SENS and INPUT menu items, briefly press the MANUAL/ AUTOMATIC key again. One of the menu sub-items then appears in the display. It is possible to switch back and forwards between these sub-items, each of which describes a possible setting, by again pressing the arrow keys. The actual setting is carried out by pressing the MANUAL/ AUTOMATIC key on the selected menu sub-item.Fig. 22 Signification of the menu options in the main menuBasic function Associated settingsX-SENS Type of information transfer between the actuator and travel measuringsystem (factory-set to DIRECT)- DIRECT- Linear relationship- LEVER- Sinusoidal relationship (use of a lever)INPUT Specification of selected unit signals- 4 ... 20 MA- Unit signal current 4 ... 20 mA- 0 ... 20 MA- Unit signal current 0 ... 20 mA- 0 ... 10 V- Unit signal voltage 0 ... 10 VADDFUNCT Configuration of additional functionsAUTOTUNE Actuation of automatic adaptation of the actuator to the valveEND End of menuUnder the menu option X-SENS, indicate whether the mechanical transmission of path information from the positioner to the feedback/positional transducer is based on a linear or sinusoidal relationship.A sinusoidal relationship results if the lever mechanism is used for the transmission of path information (cf. section 3.1.1). In this event, when LEVER is confirmed an internal linearization takes place by means of an approximated sinusoidal function.The ADDFUNCT menu item can be skipped on the initial setting up. It is used only to configure additional functions.The AUTOTUNE menu item is used to start the programme for automatic parametering of the positioner. This automatically triggers the following functions:-Matching the sensor signal to the (physical) stroke of the control valve used.-Determining parameters of PWM signals for control of the internal solenoid valves.-Optimum adjustment of the control parameters of the position controller (target function: fastest possible movement to the set position without hunting).The programme for automatic parametering is started by setting the AUTOTUNE menu item in the main menu and then pressing the MANUAL/AUTOMATIC key and holding for 5 seconds. TUNE is displayed with a countdown from 5 to 0. The word AUTOTUNE then flashes for approximately 30 to 120 seconds (depending on the actuator volume). After the flashing ends, the message TUNE END is displayed.Note: In case of complete delivery of a valve fitted with a positioner, the AUTOTUNE function has already been run through in factory. In order to obtain the best accuracy, it is recommended to run the AUTOTUNE function once more before putting the valve in operation.If it is not possible to fully complete the AUTOTUNE routine, an error message is displayed (refer to the list of error messages in part 5).。
BURKERT电磁阀常见故障解析及处理步骤

BURKERT电磁阀常见故障解析及处理步骤BURKERT电磁阀常见故障解析及处理步骤BURKERT电磁阀泄漏故障与处理方法(1)、阀门动作缓慢这个消失的大可能原因在于阀门气室有漏气的现象或者阀门阀体内有杂质例如泥浆等,这样会造成堵塞的现象,又或是阀门的填料要进行检查是否太过紧致。
(2)阀门的连接处及填料处发生的渗漏这边需要检查的是阀门的填料是否老化变质,在阀杆处应当看一下是否损坏、而密封垫圈是否存在问题,还有阀门的填料盖是否没有压紧,还有连接处的螺丝是否松弛。
(3)BURKERT电磁阀的动作不稳定对于BURKERT电磁阀在工作过程中不稳定的现象大多是由于气源的压力等造成的,也可能是定位装置输出不是很稳定,但也可能是其他的一些情形,我们还需要检查阀门减压器以及管线上的输出是否泄漏等,在执行器的执行机构的弹簧刚度是否合适等,对于阀杆的摩擦力必需较大。
(4)阀门的膜头有信号但是阀门不工作这个问题发生并非偶然,我们在发生时需要检查其阀门的阀芯和衬套或者是阀门座是否存在卡死的现象,而卡死的问题同样存在于阀门上下导,所以都要认真检查,其余对于管路以及阀门中的杂质、垃圾都需要按时的进行清理,在填料函上压盖生锈同样会产生卡死的现象。
(5)BURKERT电磁阀的振荡有蜂鸣声在工作中消失仿佛不正常的噪音大多的可能性是在要检查下在四周是否有震动源,以及阀门的支撑是否稳固,在对介质方面,要确定介质流向与阀门关闭方向相同,而对于阀门的CV值是否选大了也要检查,阀门的压差不能太大。
(6)阀门关闭后关闭不严仿佛的问题大多消失在阀门的定位器输出不能达到大值或者是零点弹簧预紧力过大或阀杆太短的原因,对此我们还需要检查的是其他在旁路是否有泄漏的现象,还有阀门的阀座是否也发生了磨损或腐蚀,在阀门压差上的问题也需要留意执行机构输出力够不够,此外还需要对膜头进行防漏气检查假如漏气需要按时的做好维护工作。
(7)膜头上压力信号所消失的问题在阀门膜头上消失的问题重要是可能在定位器放大的恒节流管孔堵塞或者是阀门膜片的泄漏、定位器输出管线的问题、对于压缩空气中的水分聚集在放大器的球阀上等需要针对各类情形进行排查。
Burkert 5282型号说明书

5282Page 1/4www.burkert–Type 5282 can be combined with...• Pivoted armature pilot drive with emergency manual operation • Media separated• Circuit function can be modifi ed • Adjustable switching times (waterhammer-free)• T hreaded port or fl ange connections • A pprovals:2/2-way Solenoid Valve with servo diaphragmThe Type 5282 is a pilot-controlled normally closedsolenoid valve with a servo-diaphragm, mediaseparated, for universal use with liquid and gaseous media corresponding to the material resistance.As standard, the 3-way pivoted armature pilot drive has an emergency manual operation. The closing and opening times are continuously adjustable.A differential pressure of 7 PSI (0.5 bar) is requiredto open the full orifi ce. The response times can be changed by turning the restrictor screws (in the body cover).Power consumption Inrush Hold D AC AC DC [W [VA] [VA/W] [W] 2414/88Type 1078Timer unitType 2511ASI cable plugType 8600Dosing controlType 2508Cable plugFM* See our HazEx™ guide for ATEX and for FM Class 1, Div. 1 versionsTechnical data Orifi ce 1/2” - 2” (DN 13 - 65 mm)Body material Threaded port Flange Brass, stainless steel 1.4581Stainless steel 1.4541Seal material NBR, FKM, EPDM (on request)Media NBR EPDM FKMNeutral media, such as compressed air, water, hydraulic oil Oil and fat-free media, incl. alkalis, hot water Hot air, oxygen, per-solutions, hot oil Media temperature NBR EPDM FKM14°F to 194°F (-10°C to +90°C)-22°F to 194°F (-30°C to +90°C)32°F to 194°F (0°C to +90°C)Ambient temperature Max. 131°F (+55°C)Voltage tolerance ±10%Duty cycle100% continuous ratingElectrical connection Tag connector acc. DIN 43650 Form A for cable plug Type 2508Protection class IP 65 with cable plugInstallationAs required, preferably with actuator uprightPage 2/45282Solenoid valve dimensionsV o l t a g e /f r e q u e n c y [V /H z ]C i r c u i t f u n c t i o nO r i f i c e [m m ]P o r t c o n n e c t i o n [N P T ]C v v a l u e w a t e r [G P M ]Ordering chart for valves (other versions on request) UL recognized / CSA/ CE Manual override, supplied without cable plug, different seal materials on requestN o m i n a l p r e s s u r e [p s i ]I t e m n o .S e a l m a t e r i a l N B R S e a l B r a s s B o d yI t e m n o .S e a l m a t e r i a l F K M S e a l S t a i n l e s s S t e e l B o d y A 2/2-way valve, NC 13.0 NPT 1/2 4.7 2.8 - 145024/DC 456 890 456 914 or 20.0 NPT 3/4 5.8 2.8 - 145024/DC 456 894 456 918024/50-60 456 895 456 919 B 2/2-way valve, NO 120/50-60 456 896 456 920 120/50-60 456 900 456 924240/50-60 456 901 456 925 32.0 NPT 1 1/4 23.5 2.8 - 145024/DC 456 902 456 926 024/50-60 456 903 456 927 120/50-60 456 904 456 928240/50-60 456 905 456 929 40.0 NPT 1 1/2 23.5 2.8 - 145024/DC 456 906 456 930 024/50-60 456 907 456 931 120/50-60 456 908 56 932 240/50-60 456 909 456 933 50.0 NPT 2 47.0 2.8 - 145024/DC 456 910 456 934 024/50-60 456 911 456 935 120/50-60 456 912 456 936240/50-60456 913456 937Dimensions [mm]Threaded portFlange port DN D B1E1F L1 B2G L213 NPT 1/2 123.0 40 14 65 – – –20 NPT 3/4 131.0 60 16 100 – – –25 NPT 1141.0 7018 115 184.5 120 16032 NPT 1 1/4 147.0 85 20 126 192.0 140 18040 NPT 1 1/2 156.0 85 22 126 201.0 150 20050 NPT 2177.5 11524 164 225.0 165 23065NPT 2 1/2 185.0 11527180–––Delivered as circuit function AChange to the circuit function B by turning the pilot drive through 180°Mounting instructions:Arrangement of the pilot control20.0 120/50-60 456 892 456 916 (Stainless steel)240/50-60 456 893 456 917 (Brass) 024/50-60 456 891 456 915 024/50-60 456 899 456 923 240/50-60 456 897 456 921 25.0 NPT 1 11.7 2.8 - 145024/DC 456 898 456 922 Threaded portFlow direction Flow directionCircuit function B Circuit function APage 3/45282Solenoid valve ordering chartV o l t a g e /f r e q u e n c y [V /H z ]C i r c u i t f u n c t i o nO r i f i c e [m m ]P o r t c o n n e c t i o n [N P T ]C v v a l u e w a t e r [G P M ]Ordering chart for valves (other versions on request) UL listed / FM class / Division 2 / CSA / CE Manual override, supplied with cable plug type 2509, different seal materials on requestP r e s s u r e r a n g e [p s i ]I t e m n o .T h r e a d e d p o r t N B R B r a s s I t e m n o .T h r e a d e d p o r t F K M S t a i n l e s s S t e e l A 2/2-way valve NC 13.0 NPT 1/2 4.7 2.8 - 145024/DC 457 870 457 894 or 20.0 NPT 3/4 5.8 2.8 - 145024/DC 457 874 457 898024/50-60 457 875 457 899 B 2/2-way valve NO 120/50-60 457 876 457 900 120/50-60 457 880 457 904240/50-60 457 881 457 905 32.0 NPT 1 1/4 23.5 2.8 - 145024/DC 457 882 457 906 024/50-60 457 883 457 907 120/50-60 457 884 457 908240/50-60 457 885 457 909 40.0 NPT 1 1/2 23.5 2.8 - 145024/DC 457 886 457 910 024/50-60 457 887 457 911 120/50-60 457 888 457 912 240/50-60 457 889 457 913 50.0 NPT 2 47.0 2.8 - 145024/DC 457 890 457 914 024/50-60 457 891 457 915 120/50-60 457 892 457 916240/50-60457 893457 917Delivered as circuit function AChange to circuit function B by turning the pilot drive through 180°.NOTE: All UL listed valves include type 2509 1/2“ conduit cable plug20.0 120/50-60 457 872 457 896 (Stainless steel)240/50-60 457 873 457 897 (Brass) 024/50-60 457 871 457 895 024/50-60 457 879 457 903 240/50-60 457 877 457 901 25.0 NPT 1 11.7 2.8 - 145024/DC 457 878 457 902 0.710.711.101.282.321.280.170.041.10M3Torque 0.74 ft-lbN P T 1/2ø 1.02without circuitryType 2509 Dimensions [mm]5282In case of special application conditions, We reserve the right to make technical 0602/2_US-en please consult for advice. changes without notice.Page 4/4。
OBT2217 GPS BD双模模块使用说明书

OBT2217GPS/BD 双模模块使用说明书版本:V2.0珠海欧比特控制工程股份有限公司广东省珠海市唐家东岸白沙路1号欧比特科技园(邮编: 519080)电话: ************传真*************声明珠海欧比特拥有此非公开出版的使用说明书的版权,并有权将其作为保密资料处理。
本使用说明书只作为操作、保养和维修产品的参考资料,其他人无权向他人公开此使用说明书。
本使用说明书包含由版权法保护的专有资料,版权所有,未经珠海欧比特的书面同意不得将本使用说明书的任何部分进行照相复制,复印或翻译成其它语言。
本使用说明书包含的内容可以不予通知而有所变更。
制造商的责任只有在下列情况下,珠海欧比特才认为应对模块的安全、可靠性和性能的有关问题负责:装配、扩充、重新调整、改进或维修均由公司认可的人员进行操作;设备的使用按操作要求进行。
目 录1.功能描述 (1)1.1.概述 (1)1.2.产品特性 (1)1.3.性能指标 (2)1.4.应用 (2)1.5.功能框图和典型应用 (3)1.5.1功能框图 (3)1.5.2 典型应用 (3)2.模块接口说明 (4)2.1.硬件接口 (4)2.1.1 电源 (4)2.1.2 天线接口 (4)2.1.3 1PPS 信号接口 (4)2.1.4 UART 接口 (5)2.1.5 GPIO 接口 (5)2.2.软件接口协议 (5)2.2.1 语句格式和内容 (5)2.2.2 输出语句 (6)2.2.3 输入语句 (7)3.机械特性 (9)3.1.模块尺寸 (9)3.2.管脚定义 (10)4.电气和温度特性 (12)4.1.模块直流特性 (12)4.1.1 极限工作条件 (12)4.1.2 推荐工作条件 (13)4.2.焊接温度曲线 (13)5.注意事项 (14)5.1.静电防护 (14)5.2.PCB设计建议 (14)5.3.模块软件升级 (15)5.4.其他 (15)附录A:订货信息 (16)附录B:装箱单 (16)1.功能描述1.1. 概述OBT 2217 BD/GPS模块是支持BD2 (B1)和GPS L1的高性能集成模块,此模块内部集成了BD2 B1/GPS L1双模SOC基带芯片和双模射频芯片,为车载、船载和便携式手持等导航定位终端产品的制造提供了高灵敏度、低功耗、低成本的BD2B1/GPS L1双模解决方案。
HM-TD5537T-7 W热成像热与光双谱网络小型定位系统商品说明书

HM-TD5537T-7/WThermographic Thermal & Optical Bi-spectrum Network MINI Positioning SystemHIKMICRO HM-TD5537T-7/W Thermographic Thermal & Optical Bi-spectrum Network MINI Positioning System equipped with built-in GPU which supports intelligent behavior analysis algorithm, can realize high-precision VCA detection and real-time alarm. It is applied to fire-prevention purposes in scenes such as transformer substation, recycling center, gas station, and factory. The pre-alarm system helps you discover unexpected events immediately and protects your property.Key Feature●Behavior analysis function, based on deep learning algorithm: line crossing, intrusion, region entrance & exit●Temperature exception alarm for fire prevention●Fire detection algorithm●384 × 288 resolution 17 μm, VOx UFPA, NETD ≤ 35 mK (25°C, F# = 1.0)●Image processing technology: Liner, histogram, and self-adaptive thermal AGC mode, DDE, 3D DNR●High quality detector with 10 years guaranteeSpecificationThermal ModuleImage Sensor Vanadium Oxide Uncooled Focal Plane ArraysResolution 384 × 288Pixel Pitch 17 μmSpectral Range 8 μm to 14 μmNETD ≤ 35 mK (25 °C, F# = 1.0)Focal Length 6.3 mmIFOV 2.7 mradAperture F1.0Field of View 54.8° × 42.5° (H × V)Min. Focusing Distance 0.6 mDigital Zoom × 2, × 4, × 8Optical ModuleImage Sensor 1/2.8" Progressive Scan CMOSResolution 2688 × 1520, 4 MPMin. Illumination Color: 0.05 Lux @ (F1.6, AGC ON), B/W: 0.01 Lux @ (F1.6, AGC ON)Field of View 58.4° × 33.8° (H × V) to 2.14° × 1.2° (H × V)Focal Length 4.8 mm to 153 mm, 32 ×Aperture (Range) F1.2 to F4.4Focus Mode Semi-auto, manualDigital Zoom × 2, × 4, × 8, × 16Shutter Speed 1 s to 1/100,000 sWDR 120 dBOptical Defog YesImage EffectPicture in Picture Display partial image of thermal channel on the full screen of optical channel Target Coloration Yes. Supported in white hot and black hot mode.PTZMovement Range Pan: 360° Continuous Rotate; Tilt: From -90° to +90° (auto flip)Pan Speed Configurable, From 0.5°/s to 90°/sTilt Speed Configurable, From 0.5°/s to 40°/sProportional Zoom YesPresets 300Patrol Scan 8 patrols; Up to 32 presets per patrolPower Off Memory YesPark Preset/Patrol Scan/Auto Scan/Tilt Scan/Random Scan/Frame Scan/Panorama Scan PT Status Turn On/Turn OffScheduled Task Preset/Patrol Scan/Auto Scan/Tilt Scan/Random Scan/Frame Scan/Panorama Scan/Dome Reboot/Dome Adjust/Aux OutputIlluminatorIR Distance Up to 30 mIR Intensity and Angle Automatically adjustedSmart FunctionVCA 4 VCA rule types (line crossing, intrusion, region entrance, and region exiting), 10 scenes and 8 VCA rules for each scene.Temperature Measurement 3 temperature measurement rule types, 273 presets as scene, 21 rules of each scene (10 points, 10 areas, and 1 line)Temperature Range -20°C to 550°C (-4°F to 1022°F) Temperature Accuracy Max. (± 2°C, ± 2%)Fire Detection Dynamic fire and smoke detection, up to 10 fire points and 10 smoke points detectable.Video and AudioMain Stream Optical channel50 Hz: 25 fps (2688 × 1520, 1920 × 1080, 1280 × 960, 1280 × 720)60 Hz: 30 fps (2688 × 1520, 1920 × 1080, 1280 × 960, 1280 × 720)Thermal channel50 fps (1920 × 1080, 1280 × 960, 1280 × 720, 704 × 576, 640 × 512, 384 × 288)Sub-stream Optical channel50 Hz: 25fps (704 × 576, 352 × 288)60 Hz: 30 fps (704 × 576, 352 × 288) Thermal channel50 fps (704 × 576, 640 × 512, 384 × 288)Video Compression Main stream: H.265+/H.265/H.264+/ H.264 Sub-stream: H.265/H.264/MJPEGAudio Compression G.711alaw/G.711ulaw/G.722.1/G.726/MP2L2/AAC/PCM NetworkProtocols IPv4/IPv6, HTTP, HTTPS, 802.1x, Qos, FTP, SMTP, UPnP, SNMP, DNS, DDNS, NTP, RTSP, RTCP, RTP, TCP, UDP, IGMP, ICMP, DHCP, PPPoENetwork Storage MicroSD/SDHC/SDXC card (up to 128 GB) local storage, and NAS (NFS, SMB/CIFS), auto network replenishment (ANR)API ISAPI, HIKVISION SDK, third-party management platform, ONVIF (Profile S, Profile G, Profile T)Simultaneous Live View Up to 20 channelsUser/Host level Up to 32 users. 3 levels: administrator, operator, userSecurity User authentication (ID and Password), MAC address binding, HTTPS encryption, IEEE 802.1x (EAP-MD5, EAP-TLS), access control, IP address filteringClient iVMS-4200, Hik-ConnectWeb Browser Live view (plug-in allowed): Internet Explorer 11 Live view (plug-in free): Chrome 57.0 +, Firefox 52.0 + Local service: Chrome 57.0 +, Firefox 52.0 +InterfaceAlarm Input 2-ch inputs (0 to 5 VDC)Alarm Output 2-ch relay outputs, alarm response actions configurableAlarm Action Preset/patrol scan/SD card record/relay output/smart capture/FTP upload/email linkageAudio Input 1 Audio Output 1Communication Interface 1, RJ45 10 M/100 M self-adaptive Ethernet interface. 1, RS-485 interfaceGeneralMenu Language 32 languagesEnglish, Russian, Estonian, Bulgarian, Hungarian, Greek, German, Italian, Czech, Slovak, French, Polish, Dutch, Portuguese, Spanish, Romanian, Danish, Swedish, Norwegian, Finnish, Croatian, Slovenian, Serbian, Turkish, Korean, Traditional Chinese, Thai, Vietnamese, Japanese, Latvian, Lithuanian, Portuguese (Brazil)Power Supply 24 VDC Power Consumption 20 WWorking Temperature/Humidity -40°C to 70°C (-40°F to 158°F) 90% or lessWiper YesProtection Level IP67 StandardTVS 6000V lightning protection, surge protection, voltage transient protectionDimensions 321 mm × 194 mm × 153 mm (12.64" × 7.64" × 6.02") Weight Approx. 4.8 kg (10.582 lb)DRI Range Table* The table is only for reference and the performance may vary according to different environment.* The optimal detection, recognition, and identification distances are calculated according to Johnson’s Criteria.Detection Range: In order to distinguish an object from the background, the object must be covered by 1.5 or more pixels. Recognition Range: In order to classify the object (animal, human, vehicle, etc.), the object must be covered by 6 or more pixels.Identification Range: In order to identify the object and describe it in details, the object must be covered by 12 or more pixels..Detection Range (Vehicles: 1.4 × 4.0 m) Detection Range (Humans: 1.8 × 0.5 m) Recognition Range (Vehicles: 1.4 × 4.0 m) Recognition Range (Humans: 1.8 × 0.5 m) Identification Range (Vehicles: 1.4 × 4.0 m) Identification Range (Humans: 1.8 × 0.5 m) 568 m185 m142 m46 m71 m23 mSmart Function Table* The table is only for reference and the performance may vary according to different environment.VCA Range(Vehicles: 1.4 × 4.0 m) VCA Range (Humans: 1.8 × 0.5 m) Temperature Measurement (Object: 2 × 2 m) Temperature Measurement (Object: 1 × 1 m) Fire Detection (Object: 2 × 2 m) Fire Detection (Object: 1 × 1 m) 132 m44 m 148 m 74 m371 m185 mAvailable Model HM-TD5537T-7/WDimensionCOMPLIANCE NOTICE: The thermal series products might be subject to export controls in various countries or regions, including without limitation, the United States, European Union, United Kingdom and/or other member countries of the Wassenaar Arrangement. Please consult your professional legal or compliance expert or local government authorities for any necessary export license requirements if you intend to transfer, export, re-export the thermal series products between different countries.。
宝德1067定位器中文

定位器操作手册1067型定位器目 录1引方 (2)1.1拆箱与检验 (2)1.2有关使用和安全方面的注意事项 (2)1.3电磁兼容性 (2)2说明 (3)2.1特性和可能的应用场合 (3)2.2结构 (5)2.3工作原理 (6)2.4安全位置 (7)2.5技术参数 (8)3安装 (9)3.1结构和安装 (9)3.3.1将定位器安装到带膜片执行机构(NAMUR)的连续调节阀上 (9)3.3.2将定位器安装到带活塞执行机构的2031型连续调节阀上 (11)3.3.3将定位器安装到带旋转式执行机构的连续调节阀上 (13)3.2流体接口 (14)3.3电气连接 (15)4操作 (16)4.1控制与指示器 (16)4.2操作界面 (17)4.3设置 (18)4.4过程控制 (19)4.4.1过程控制界面中LED和各键的含义 (20)4.4.2显示器 (20)4.5组态 (21)4.5.1附加功能 (21)4.5.2组态菜单 (22)4.5.3组态界面中各键的功能 (25)4.5.4基本功能与附加功能注释 (25)4.6无电源时手动操作 (34)4.7定位器的结构 (35)5维护 (36)出错信息 (36)1.1拆箱与检验请检查产品的完整性和无运输损坏参考号642292A-1操作手册1.2有关使用和安全方面的注 意事项本手册不包括任何保证条款为确保本定位器正常的功能和较长的寿命安装条件以及Data Sheet中给出的参数允许值应采取一些措施以防止因非故意行为而导致的对工艺的影响如定位器作为复杂控制系统的一部分操作只能由授权的经过培训的人员进行维修为了更好地发挥本产品所具有的许多优点维护和维修本定位器请仔细阅读本手册产品功能和使用安全要引起特别注意为符合该规范主机密码通过设置一个可自由选择的用户密码此外编好程的该4位主机密码在本页的底边给出主机密码:65682.1特性和可能的应用场合(概论)1067型定位器是用于气动连续调节阀的电气位置控制器一个电气系统和一个微处理器电子系统微处理器电子系统连续地将实际位置(实际值)与所需位置值(该值已由标准信号输入进行预设置)进行比较并将其结果输给位置控制器电气系统即修正实际位置膜片和旋转式执行机构的阀门和单作用或双作用阀门)Æä¹Ì¶¨·½Ê½ºÍ·´À¡/位置传感器不同采用旋转式电位计以外部线性电位器作为反馈/位置传感器除了位置控制外压力一个液晶显示器和三个键的键盘用于操作定位器并可通过手动驱动阀门如有必要图1 1067型定位器方块图位置控制器可选的附加功能分级界面操作特性0...10 V0...20 mA4...20 mA4...20 mA2.2结构定位器包括下列主要部件:-阀体和阀帽(铝)-测量阀位的内部反馈/位置传感器-处理和控制信号的微处理器/电子部件-控制连续阀的电磁阀-带流体接口的流体板-接线端子和电缆接头-显示器和键盘图2 带内部反馈/位置传感器的定位器剖面图带铰链铝质阀体和阀帽电子部件显示器和键盘手动操作连接端子电缆接头流体板流体接口电磁阀位置传感器轴内部反馈 /位置传感器NAMUR 接口图3 外部反馈/位置传感器在组合2中2.3工作原理图4为带活塞驱动连续调节阀的定位器的工作原理图图4 工作原理图阀的实际位置由反馈/位置传感器测得对应于偏差通过该脉冲控制用于定位连续阀的执行机构的进气和排气由内部过程控制器决定时并与被控制的实际过程值(如流量液位或温度)相比较(图4)1067就仅作为位置控制器(图5)Âö¿íµ÷ÖÆÆ÷½ÓÔÚ¿ØÖÆÆ÷µÄÊä³ö¶Ë控制电磁阀进气或排气存在正偏差时存在负偏差时该定位器既可用于单作用执行机构也可用于双作用执行机构可控制双作用执行机构的另外两个电磁阀它就成为主控制回路的一部分整个系统为连续控制(图6)反馈/位置传感器位置控制器过程控制器实际位置电磁阀传感器进气排气过程值(压力液位...)设定位置外部设定值过程设定值活塞阀图5位置控制图6过程控制2.4安全位置电源故障时2.5技术参数电气参数电源:功耗:所需值输入输入设定值用于位置或过程控制:过程信号输入(过程控制时):二进制输入:接线端子:气动参数控制介质:压力范围:空气流量进气阀:排气阀:稳态下空气消耗:接口:(1)当压力从6 bar降至5 bar时机械参数内部行程测量系统调节范围:外部行程测量调节范围:过程控制器参数比例调整值KP:复位时间TN:比率时间TV:起始操作点:安装和工作参数定位器外型尺寸:定位器材质:流体板材质:定位器重量:防护等级:工作温度:24 VDC<10W-标准信号 4...20 mA-标准信号 4...20 mA-标准信号 4...10 V-标准信号 4...20 mA可配置为常开或常闭触点1.5mm2端子两个PG9螺纹接头过滤润滑的或非润滑的0...6bar23Nl/min(1)25Nl/min(1)0Nl/min(1)G1/8上升:0...50mm0...99,990.5...999,90.0...99,90...100%125mmx80mmx80mm(WxHxD)铝阳极化处理过的Approx.1kgIP 650 (60)1067型定位器3安装3.1结构和装配1067型定位器可安装在各种连续调节阀上可采用带内部反馈/位置传感器(旋转电电位计)的组合13.1.1将定位器安装到带薄膜执行机构的连续调节阀(NAMUR接口)上配置配带薄膜执行机构的连续调节阀时定位器拧在膜片执行机构的<<lantern>>上(图7)aprox.65mm approx.95(115)mm主要尺寸:定位器宽度:高度:深度:125mm 80mm 80mm外部反馈/位置传感器直径:高度:图7安装到265型带薄膜执行机构的连续调节阀上安装安装弯管(图 10)用来将组合1的定位器安装到薄膜执行机构的连续调节阀(如 265型)上用垫圈7和螺钉8将销钉2固定在NAMUR 杆4的位置上将杆4和销钉放在定位器位置传感器的轴上然后用螺钉9固定杆图8 带NAMUR杆定位器后视图图9安装中杆的位置Parallel将带安装弯管1的定位器安装到薄膜执行机构上杆针与定位器的上边平行运动(图9)而定位器的后边与托架3平行运动用两个U形螺钉5-对于带管式lanterns的膜片执行机构3.1.2将定位器安装到活塞执行机构的2031型连续调节阀上配置配活塞执行机构的连续调节阀时定位器放在阀上并拧紧(图11和图12)ͼ11 安装到2031型带活塞执行机构的连续调节阀上安装将组合2的定位器安装到2031型带活塞执行机构的连续调节阀上图13)用来将组合2定位器安装到活塞阀(如2031型)上两个螺钉2应按以下步骤将定位器安装到 2031型活塞阀上(图 13):将一个O 型圈3放在安装板1驱动面的凹处将两个M5圆头螺钉4从驱动面穿到安装面这样下面的连接件即由O 型圈密封将定位器放在安装板上并用两个圆头螺钉4拧紧按以下步骤安装外部反馈/位置传感器(图13和图14):检查阀门执行机构(顶部)有一个O 型圈3ͼ12定位器后视图(变型2)从上面直接将位置传感器装到执行机构上拧入位置传感器并用扳手固紧使电缆出口位于所需位置松开位置传感器的盖子取出位置电缆7的插座并将其插入传感器外壳中(绿线接绿线褐线接黄线)Å¡½ôPG螺纹接头图13定位器安装图及外部位置传感器与2031型带活塞执行机构(NAMUR接口)的连续调节阀的安装图图14外部反馈/位置传感器用于宝得活塞阀(3.1.3将定位器安装到旋转式执行机构的2031型连续调节上配置配旋转式或角行程执行机构的连续调节阀时它的轴与旋转式执行机构(如摇臂阀)配合图15 安装到旋转式执行机构的连续调节阀上安装连接器(适配器)1用来将组合1的定位器安装到旋转式或角行程执行机构(如3210型另外可通过角行程执行机构生产厂获得应按以下步骤进行安装(图18)½«Á¬½ÓÆ÷1放在定位器反馈/位置传感器的轴上将定位器放在安装夹上用4x M6螺钉将定位器固定在安装夹上如果AUTOTUNE 功能开始后必须松开安装螺钉并将位置传感器的轴旋转180然后再拧紧安装螺钉重新做AUTOTUN E´ø°²È«¿×图17用于旋转式换行机构的连接器图18 将定位器安装到旋转式执行机构的连续调节阀上3.2流体接口P 口接压缩空气源(最大6bar)带旋转式执行机构的连续调节阀单作用双作用单作用3.3电气连接图20接线柱配置注意:PE 端子必须用一根尽量短的电线(最长30c m)与一个接地点相连输入U1(0...10V)输入I1(0/4...20mA)输入I2(4...20mA)输入阻抗220k 输入阻抗<1754.1控制与显示器向上向下4.2操作界面这种定位器有两种操作界面:1ÏÔʾÆ÷×Ô¶¯½øÈë´Ë½çÃæÊÖ¶¯×Ô¶¯ÔÚģʽÏòÉϼü¿ÉÒÔ´ò¿ª»òÕ߹رշ§ÃÅ设置界面在此界面中对定位器的基本功能进行初始化定义附加功能每次通电时过程控制界面此时按动键可以切换到模式手动/自动就会切换为4.3设置图21主菜单初始设置定位器与2632型角座控制阀联接完成后4...20mA或者0...10V):-进行执行机构与受控制阀之间的初始化自动适配定位器自动进入过程控制界面手动/自动由过程控制界面切换到这时显示器显示的是主菜单第一项在X-SENS 项中线性正弦曲线如果采用杠杆式传输方式正弦曲线因此L E V E RADDFUNCT 项仅在需配置某些附加功能使用AUTOTUNE 项对定位器进行自动参数编辑它包括以下功能:-匹配传感器的信号与控制阀的行程要进行AUTOTUNEÈ»ºó°´×¡ÊÖ¶¯/自动键5秒钟TU NRËæºó³öÏÖÉÁ˸µÄ×Ö大约持续30至120秒(闪烁时间根据执行机构的容积不同)ÏÔʾAUTOTUNE为了获得最佳精度如果AUTOTUNE 不能顺利完成见流程图向上键选择要进行设置的主菜单手动/自动在子菜单中通过向下再按一下键即可确认图22 主菜单中各选项的含义基本功能X-SENS-DIRECT -LEVER INPUT-4...20mA -0...20mA -0...10V ADDFUNCT AUTOTUNE END相关设置执行机构与行程测量系统之间信息转换的关系(工厂设置DIRECT)-线性关系-正弦曲线关系输入信号的规格-电流信号4...20mA -电流信号0...20mA -电压信号0...10V 附加功能的设置执行机构与受控阀的自动适配菜单结束1067型定位器4操作4.4过程操作4.4.1在过程控制界面中LED 和各键的含义要退出设置界面的主菜单E N DÈ»ºó°´Ò»Ï¼üÈ·ÈϺó¼üÖеÄÂÌÉ«L ED 灯亮时表示:自动模式键中的绿色L ED 灯灭时表示:手动模式-按手动/自动键小于5秒钟手动自动-按手动/自键大于5秒钟-在模式下PC O N TR L S ET PO I N TI N T ER显示时上中的一个持续上键(小于可以改变显示向上-在手动模式下按键可以关闭执行机构上键可以在这两种显示之间转换会有下列显示:过程变量的实际值:PV -(-99.9...999.9)过程变量的期望(设定)值:SP -(-99.9...999.9)阀驱动的实际位置:XPOS -(0...100%)阀驱动的期望(设定)位置:WPOS -(0...100%)按下过程控制器有效如果在组态时定义附加功能时上键中的一个持续具体为:松手后此时通过键可改变其大小;然后按键确认重复同样的操作四位数全部确认后显示执行机构的实际位置:XPOS-(0...100%)ģʽϵÄÏÔʾ¹ý³Ì¿ØÖÆÆ÷ÎÞЧ在手动状态下将持续显示实际过程值:PV -(-99.9...999.9)按住下并显示实际位置值:X P O S-(0...100%)当松开按着的键时手动模式的转换通过键实现如果按住向上键动作停止如果按住向下键如果在按住一个向上或向下键的同时可以使阀快速向先按的键所代表的方向动作都可以按键进入组态界面4.5组态4.5.1附加功能定位器的操作有严格的基本功能和附加功能区分通过设置这些功能如有近一步的位置或过程控制需求下表为附加功能列表图24附加功能附加功能 参数ACTUATE-SINGLEINTERNBOOST-DOUBLE CHARACT-LINEAR-1:25-1:50-25:1-50:1-FREE DEADBND-DBD CLTIGHT-CLT DIRECTN WPOS-RISE-FALLXPOS-RISE-FALL SPLTRNG-MIN-XMAX 描述执行机构功能单作用执行机构带外部增压阀-双作用执行机构选择输入信号和行程之间的转换特性曲线(校正特性曲线) -线性特性曲线-等比率特性曲线:1:25-等比率特性曲线:1:50-反向等比率特性曲线:25:1-反向等比率特性曲线:50:1-用户定义以%表示-设定输入信号的最大值二进制输入开4.5.2组态菜单由过程控制界面按住键5秒钟它由主菜单和附加功能菜单组成可以通过主菜单中的项进入如果需要通过选择附加菜单中的附加功能实现首先选择主菜单中的项手动/自动通过下然后按键确认同时会被扩展进主菜单中EN DFUN CT²¢·µ»ØÀ©Õ¹ºóµÄÖ÷²Ëµ¥²¢¿ÉÒÔ½øÐÐÉèÖÃÓëÓ¦ÓÃÐèÒªÔÙ½øÈë项按键*È»ºóÍ˳ö¸½¼Ó¹¦Äܲ˵¥¼´¿É°´Ï°´¼ü½øÐÐˮƽ·½ÏòÑ¡Ôñ°´Ï°´¼üSelection of item ADDFUNCTAdditional menuExpanded main menuReturn to expanded main menuConfirmation of selected additional functions for importation in main menuMain menuConfirmation of selected item图26 完整的组态菜单X-SENS DIRECT LEVERINPUT 4...20MA 0...20MA 0 (10V)ACTUATE DOUBLECHARACTLINEAR 1/251/5025/150/1FREE5100DEADBNDDBDCLTIGHT CLTDIRECTN WPOS XPOS ENDRISE FALLRISE FALLSPLTRNG MIN MAXX-LIMIT X-MIN X-MAXPCONTRL SETPOINT PARAM SCALE INTERN EXTERNKP TN TV X0X-TIMEOPN FAST OPN SLOWCLS FAST CLS SLOWSINGLE INTERN BOOSTENDDBDPV-H SP-L SP-HPV-L DP BIN-ININACTIVE SAFEPOSSPOS NORM OPN NORM CLSADDFUNCT AUTOTUNE ENDAOUTPUT BINARY CODE ANALOG NORM CLSXDXDONORM OPN BOOSTCODE MENU+M/A MENU4.5.3组态界面中各键的功能键:-向上滚动选择菜单选项-在菜单选项中增加数字值键:-向下滚动选择菜单选项-在菜单选项中减小数字值主菜单中使用键:-确认所选择的菜单项-确认设定值附加功能菜单中使用键:-确认所选择的附加功能项*¸ÃÏîÇ°标记将会消失4.5.4基本功能与附加功能注释X-SENS(工厂设定:DIRECT):阀的连续动作与行程测量系统之间信息转换类型其反馈信号与阀实际位置是线性关系D I R E C TLEVER:阀位与测量系统输入信号之间为正弦关系例如:Ty pe265带内部反馈/旋转电位计选项:40mA:输入信号类型为4...20mA00mA:输入信号类型为0...20mA00V:输入信号类型为0 (10V)图27 校正特性曲线ACTUATE (工厂设定:SINGLE,INTERN):阀执行机构的工作方式不带增压阀带增压阀CHRACT (工厂设定:LINEAR):用户指定的特性:该附加功能使用户可以选择一个阀门设定值(设定位置)和阀行程关系的转换特性曲线以Kv 值关于阀行程的关系表示一般有两种流量特性曲线:线性和等百分比相等的阀行程变化d s 产生相等的k v 值变化d K v(dKv=n lin ds)·§Ðг̱仯ds 对应于Kv 值的等百分比变化(dKv/Kv=n percent ds)¸ÃÇúÏßÒ²ÊܹܵÀÒò¶ø»áÆ«ÀëÁ÷Á¿ÌØÐÔÇúÏßͨ³£ÐèÌá³ö¶Ô¹¤×÷ÌØÐÔÇúÏß(如线性)的特殊要求有时需采用适当的方法来校正工作特性曲线1067定位器提供了具有多种特性曲线的转换元件可以设置一种线性和多种等百分比特性的曲线1:5050:1(参见2.7)»¹¾ßÓпÉ×ÔÓɱà³ÌµÄÌØÐÔÇúÏß¿É×ÔÓɱà³ÌµÄÌØÐÔÇúÏßSet positionP l u g t r a v e l自由编程的特性曲线的输入特性曲线是将设定范围按0...100%等分为21个间隔为5%的设定点而定义的但相邻两个设定点之间的行程差不能超过20%Ê×ÏÈÑ¡µ½F R E E子项手动/自动在它后面就是行程值为0(%)ϼü´Ó0至100%之间设定手动/自动而下一个设定点将会显示程序返回到CH AR AC T菜单图28编程设定的特性曲线示例Plug travel (%)Unit signal (%) Set position (%)Plug travel (%)Input with "Arrow" keysRestart pointDEADBND(工厂设定:DBD=0.5%):系统偏差的死区只有在系统偏差超过特定的死区范围时它能有效地保护伺服原理工作的阀最小由定义该功能使阀在控制范围以外关闭完全充满定义为100%设定范围:0.0...10%(如图30)图32 将一种信号范围分成2段设定范围DIRECTN (工厂设定:WPOS=RISE. XPOS=RISE):动作的方向XPOS 定义为:实际位置值和执行器AI 口供气状态之间的动作方向MAX=100%):范围分段0...20mA选用来控制一或多个定位器图31 动作方向1067型定位器4操作Input DIRECTN Setpoint WPOSI1U1(WPOS)0/4 mA 0 V RISE 0 %20 mA 10 V 100 %0/4 mA 0 V FALL 100 %20 mA10 V0 %Air supply DIRECTN Measure State A1XPOS (XPOS)Air exhaust RISE 0 %Air on100 %Air exhaust FALL 100 %Air on0 %0/4 mA Input signal20 mA0 V10 V air exhaustair onAir supply stateFALLRISEFALLRISESetpoint (mA)Setpoint rangepositioner 1Setpoint range positioner 2Plug travel (%)选项:OPN FAST:以最快速度打开阀;OPN SLOW:阀门打开时限速CLS FAST:以最快速度关闭阀CLS SLOW:阀门关闭时限速PCONTRL(过程控制):过程控制器组态TV:(微分时间)设定范围:0.0...999.9(工厂设定:0)XO:(过程控制器的起始工作点)设定范围:0...100%(工厂设定:0%)DBD:过程控制器不响应范围(死区)设定范围:0.2...5%(工厂设定:0.5%)SC ALE:定义过程控制器的输入值范围过程控制器的比例系数(K P)与设定值的范围相关下键输入设定值)SP-H)PV-H)直接输入即可BIN-IN:(工厂设定:INCATIVE):二进制输入用于保护定位器不接受非法操作AU TO TU NR:自动调整1067型定位器4操作4.6无电源手动操作定位器中的电磁阀不需电源即可通过旋钮(红色)手动操作可操作这些旋钮图35手动操作使用旋钮的条件:-任何情况下都不能通电-必须有气源双作用执行机构中接到A2口的腔室进气双作用执行机构中接到A2口的腔室排气所有旋钮必须转到0位图36 1067型定位器流程图4.7定位器结构1067型定位器4操作1067型定位器5维护出错信息通电状态的出错信息无法处理AUTOTUNE功能时的出错信息1067型定位器。
TDR2000 2 (CFL535F) 时域传输定位器说明书
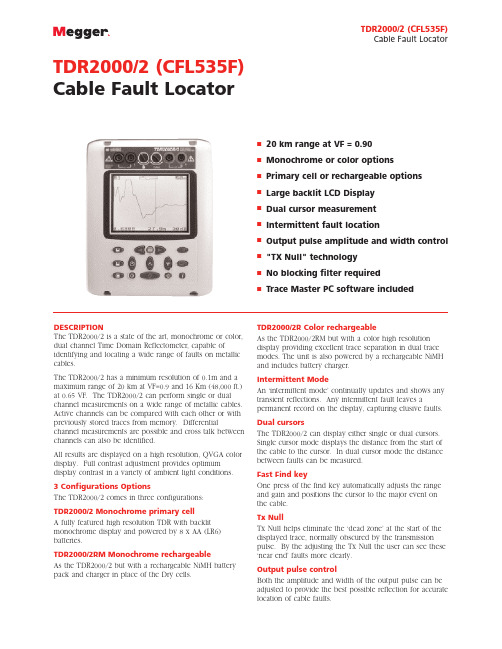
TDR2000/2 (CFL535F)Cable Fault LocatorI 20 km range at VF = 0.90I Monochrome or color options I Primary cell or rechargeable options I Large backlit LCD Display I Dual cursor measurement I Intermittent fault locationI Output pulse amplitude and width control I "TX Null" technology I No blocking filter requiredITrace Master PC software includedTDR2000/2 (CFL535F)Cable Fault LocatorDESCRIPTIONThe TDR2000/2 is a state of the art, monochrome or color,dual channel Time Domain Reflectometer,capable ofidentifying and locating a wide range of faults on metallic cables.The TDR2000/2 has a minimum resolution of 0.1m and a maximum range of 20 km at VF=0.9 and 16 Km (48,000 ft.)at 0.65 VF. The TDR2000/2 can perform single or dual channel measurements on a wide range of metallic cables. Active channels can be compared with each other or with previously stored traces from memory. Differentialchannel measurements are possible and cross talk between channels can also be identified.All results are displayed on a high resolution, QVGA color display. Full contrast adjustment provides optimum display contrast in a variety of ambient light conditions.3Configurations OptionsThe TDR2000/2 comes in three configurations:TDR2000/2 Monochrome primary cell A fully featured high resolution TDR with backlit monochrome display and powered by 8 x AA (LR6)batteries.TDR2000/2RM Monochrome rechargeableAs the TDR2000/2 but with a rechargeable NiMH battery pack and charger in place of the Dry cells.TDR2000/2R Color rechargeableAs the TDR2000/2RM but with a color high resolution display providing excellent trace separation in dual trace modes. The unit is also powered by a rechargeable NiMH and includes battery charger.Intermittent ModeAn ‘intermittent mode’ continually updates and shows any transient reflections. Any intermittent fault leaves apermanent record on the display, capturing elusive faults. Dual cursorsThe TDR2000/2 can display either single or dual cursors.Single cursor mode displays the distance from the start of the cable to the cursor.In dual cursor mode the distance between faults can be measured.Fast Find keyOne press of the find key automatically adjusts the range and gain and positions the cursor to the major event on the cable.Tx NullTx Null helps eliminate the ‘dead zone’ at the start of the displayed trace, normally obscured by the transmission pulse. By the adjusting the Tx Null the user can see these ‘near end’ faults more clearly.Output pulse controlBoth the amplitude and width of the output pulse can be adjusted to provide the best possible reflection for accurate location of cable faults.TDR2000/2 (CFL535F) Cable Fault LocatorInteractive Help ScreenA full graphical help screen is available with keyboard layout and individual key operation. At the press of a button.Trace Storage15 internal trace memories provide for the storage and recall of test results. The traces can be recalled to the display for analysis or compared with an active display to aid in fault location.Alternatively the stored results can be downloaded to a computer, over the RS232 port, using the TraceMaster software and RS232 lead provided.Trace Master PC SoftwareTrace Master provides download and upload facilities between the TDR and a computer. Traces can be individually selected, saved to a PC and annotated by the user. Historical information can be reviewed on the PC or recalled to the TDR for comparison with current measurements. Trace-Master is the ideal tool for cable documentation. Results can be printed from the computer for inclusion in documents.Power sourceThe TDR2000/2 can be supplied as a standard battery powered unit or in a rechargeable version, as theTDR2000/2RM or TDR2000/R. Fitted with a NiMH rechargeable battery pack the TDR2000/2R andTDR2000/RM are supplied with the charger as standard.BENEFITSI11 fault location modesI For use on Telecom TNV-3 circuit, or 300V CAT IIIpower circuits with fused leads. Phase to Earth or 415 V Phase to PhaseI External mains blocking filter not requiredI Screen contrast controlI Multi language operation, uploadable usingTraceMaster softwareI3step pulse amplitude controlI Adjustable display contrastI15 trace internal memoryI Protected to IP54I High impact ABS caseI Comes with test and carry case and test leads SPECIFICATIONExcept where otherwise stated, this specification applies at an ambient temperature of 20°C.Ranges50 m, 100 m, 200 m, 400 m, 1 km, 2 km, 4 km, 8 km, 16 km (150 ft, 300 ft, 600 ft, 1200 ft, 3000 ft, 6000 ft, 12000 ft, 24000 ft, 48000 ft)Resolution0.1 m (4in.) up to 200 m (600 ft)0.2 m (8 in.) up to 400 m (1200 ft)0.1% of range above 400 m (1200 ft)Measurement Accuracy0.1% of Range[Note – The measurement accuracy is for the indicated cursor position only and is conditional on the velocity being correct] Input Impedance:120 Ω.Input Protection:300 V CATIII working, 415 V CATIII Phase to PhaseOutput Pulse AmplitudeNominal 3 V, 5 V and 14 Vpk to pk into an open circuitPulse width user selectable:50m range:7ns, 20 ns, 40 ns,150 ft60 ns, 80 ns100m range:7ns, 40 ns, 60 ns,300 ft80 ns, 100 ns200 m ranges:7ns, 40 ns, 80 ns,600 f t140 ns, 200 ns400 m range: 40 ns, 80 ns, 160 ns,1200 ft200 ns, 400 ns1km range:80ns, 160ns, 260 ns,3000 ft500 ns, 1 ms2km range:160 ns, 260 ns,6000 ft500 ns, 1 ms, 2 ms4km range:240 ns, 500 ns,12000 ft1ms, 2 ms, 4 ms8km range:500 ns, 1 ms, 2 ms,24000 ft4ms, 8ms16km range:1ms, 2 ms, 4 ms,48000 ft8ms, 16 ms(Default pulse width for each range underlined)Gain:0to 90 dB in steps of 6 dBVelocity FactorVariable from 0.300 to 0.999 in steps of 0.001TX Null:0Ωto 120 ΩScreen Update RateOnce per second or three times per second, (user selectable).Power DownAutomatic after 5, 10 or 15 minutes with no keys pressed, (user selectable).BacklightStays on for 1, 2 or 5 minutes when activated, (user selectable).Communications PortRS-232C compatible 1 start bit, 8 data bits, 1 stop bit and no parity, 19200 baud standardInternal Memory:Storage capacity of 15 waveforms and dataBatteriesTDR2000/2Eight LR6 (AA) type batteries, manganese-alkali or nickel-cadmium or nickel-metal-hydride cells.TDR2000/2RM NiMH cellTDR2000/2R NiMH cellBattery ChargerSupply voltageEuropean Version:230 Vac ±10% 50 HzNorth American Version:115 V a.c. ±10% 60 HzSafetyThis instrument complies with IEC61010-1 for connection to live systems up to 300V CAT III with fused leads.EMCThe instrument will comply with EN 61326-1, classified as ‘class B’. If connected to a live domestic power supply, the operationof this instrument could cause interference with other equipment connected to the same supply. To reduce this interference, select the lowest voltage and narrowest width pulse as consistent with accurate measurement. During immunity tests there may be self-recovering loss of function (i.e. Performance criterion B).MechanicalThe instrument is designed for use indoors or outdoors and is rated to IP54.Case Dimensions250 L x 200 W x 110 D mm(9.8 H x 7.9 W x 4.3 D in.)Instrument Weight1.5 kg (3.3lbs)Case MaterialABSConnectorsTwo pairs of 4mm safety terminals.9way D-type connector for serial communication.Display320 x 240 pixel eight color backlight LCD.EnvironmentalTDR2000/2Operational Temperature-15°C to +50°C (5°F to 122°F)Storage Temperature-20°C to +70°C (-4°F to 158°F)TDR2000/2ROperational Temperature-15°C to +45°C (5°F to 113°F)Storage Temperature-20°C to +45°C (-4°F to 113°F)Charging should not take place when the ambient temperature is less than 0°C(+32°F)Humidity<95% at +40°C non-condensingUKArchcliffe Road, Dover CT17 9EN EnglandT(0) 1 304 502101F(0) 1 304 207342UNITED STATES4271 Bronze WayDallas, TX 75237-1018 USAT1800 723 2861T1214 333 3201F1214 331 7399OTHER TECHNICAL SALES OFFICESNorristown USA, Toronto CANADA,Mumbai INDIA,Le Raincy FRANCE, CherrybrookAUSTRALIA, Guadalajara SPAINand The Kingdom of BAHRAIN.ISO STATEMENTRegistered to ISO 9001:1994 Reg no. Q 09250Registered to ISO 14001 Reg no. EMS 61597TDR2000_DS_en_V12Megger is a registered trademark。
Samson 3730-3定位器中文操作说明
Samson 3730-3定位器中文操作说明Samson 3730-3 定位器操作说明一、安全信息1、请勿靠近高压、热源、有毒物质或易燃物质。
2、确保保持清洁,产品表面无污染,并在安装过程中避免静电放电现象。
3、请确保蓄电池安装的牢固,避免振动之类的物理伤害。
4、请确保电源处于安全和可靠的使用状态,确保电气安全。
二、基本性能Samson 3730-3定位器是一款高精度定位器,具有高稳定性和可靠性,可用于多种应用场景,最大特点是可根据传感器和用户设置的模型实时检测对象位置,有效保护对象压力变化。
1、重复定位精度:超过1mm;2、测量范围:200mm;3、传感器类型:可编程和固定;4、传感器电流:最大100mA;5、启用保护:供电欠压保护(<3V);6、可靠性性能:可用于恶劣环境;7、配置文件:通过以太网或GPRS通信。
三、操作过程(1)把电源打开;(2)安装定位器头部和控制单元;(3)安装传感器和安装模块;(4)连接电源和连接到控制单元;(5)运行传感器定位程序:将安装模块安装在定位头部上,并在控制单元上运行传感器定位程序;2、设置参数:(1)在定位头部上设置传感器,根据传感器型号设置参数:(2)设置定位器的参数:根据定位器的设置,设置相应的参数;3、连接网络:(2)通过以太网或GPRS通信连接到定位器上,用户可以通过设置合适的参数校准定位器;(3)设置定位器的IP地址,可通过配置文件实现远程控制定位器。
四、常见故障处理1、定位器失灵:(2)检查传感器是否连接正确;(3)确认定位器及控制单元是否有损坏;(5)重启定位器即可恢复。
2、信号弱:(3)检查路径结构或检查环境可能会降低信号强度;(4)更换增强信号的设备或信号放大器;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
外部反馈/位置传 感器(上下动作)
Wet 破真空阀
电缆插座
外部反馈/位置传 感器 信号线
安装板
O型圈
1067定位器
执行器进气口
和定位器出气口 相连
阀门开度值由 PLC 4—20MA模 拟量信号给入
WET 真空混料破真空阀
执行器阀杆 外部反馈/位置传感器的滑块在上下滑动过程中松动\脱落 造成阀门 定位错误 产生报警
Nucon 大料罐 放料阀
阀门 和执行 器连接处
内部反馈/位置传 感器 (转动)
双作用
名词解释
双作用:气缸的移动和返回都是通过仪表空气来提供动力。 单作用的扭矩要比双 作用的小得多。故双作用一般用于需要较大扭矩的阀门.如果两边气源同时切断 阀门将保持断气前的开度
定位器的主菜单项
• X-SENS
选择 direct
Positioner 1067 交流稿 施建祥201203
手动/自动
电源 : 24VDC 气压0—6bar 1067 定位器分为两种 1:内部反馈/位置传感器 采用旋转电位计
2: 外部反馈/位置传感器 采用外部线性电位器 按5秒手动/自动 键进入 组态界面
Wet 真空混料 破真空阀
单作用
名词解释 单作用:气缸的移动通过仪表空气的压力,返回时由弹簧提供压力
• INPUT
输入信号4—20MA
• ADDFUNCT
附加菜单 加*号选择功能
• AUTOTUNE
自动校正
END
出菜单
定位器ADDFUNCT 菜单
打*前
在进入到OUTPUT后, 按下 手自动键 前面会出现 * 字 代表被主菜单调用 , 如果 没有*字则output 下的所有
功能 定位器将不执行
万能密码6568
打*后
注意单作用 (intern) 双作用(double)
nucon定位器内部图
信号1
阀门开度 由PLC 4— 20MA信号
给定
排线接口容 易松动
信号2
红色圈内为OUTPUT 数 字输出板安装处 nucon
料罐选用
生产过程中不建议打开盖子,打开过程中排线易松动,会造成信号 断开,造成停产
NUCON定位器和执行器连接图
信号常开常闭输出 设定
阀门开度大于设 定值 输出信号
例如 :值设定为5 阀门关闭度大于 等于5信号输出 , 触发相关的程序 连锁,小于5不输
出
自动校正
按5秒
完成校 正
校正前最好去除 外加信号 防止
信号干扰
1 . 进入主菜单 2 . 选AUTOTUNE 长按5秒 3. 等待30—120秒,在此过程中阀会 连续打开\关闭阀门几次.所以必须 充分考虑到阀门关闭打开的后果,
安装固定 板
连接轴顶 丝
顶丝处 为平面
执行器和位置 传感器连接轴
套
顶丝松动会造成 ,轴转过的角度和实际角度产生偏差.需要重新自动较正
定位器内部图
内部反馈/位 置传感器
阀的实际位置由内部反馈/位置传感器测得,通过电路脉冲控制电磁阀的通 断,从而控制执行机构的进门和执行 器的连接
等待30— 120秒
THANK YOU!!!
• 让我们互相学习,构建美好未来!!