宝德8692型定位器-快速入门中文说明书
电动阀门智能定位器使用说明书概要
电动阀门智能定位器使用说明书Intelligent Electric Valve Locator Instruction Manual一、简介Introduction二、面板说明Panel Description1、按键功能说明The Key Function Description(1) A/M 键:A/M KeyA.手 /自动模式切换;Manual/Auto mode switchingB.手动模式下按 2 秒进入标定模式、In Manual mode, press it for 2 seconds to enter calibration modeC.标定模式下标定结果的储存和确认等;In calibration mode the verification and storage of the calibration results and soon(2)▲键:▲KeyB.手动模式下控制电机正转;In Manual mode control the motor forwardB.标定模式下做累加键使用;In calibration mode as the use of cumulative( 3)▼键:▼KeyA. 手动模式下控制电机反转;In Manual mode control the motor reversalB.标定模式下做递减键使用;In calibration mode as the use of decreaseC.自动模式下按 2 秒进入初始化模式In Auto mode, press it for 2 seconds to enter the initialization mode2、数码管显示说明(参照表1)LED display description (Table 1)( 1)手动模式下,显示阀门相应开度,显示范围不受0.00~ 100.0 的限制;In Manual mode, display the corresponding valve opening, the display range is notlimited from 0.00 to100.0( 2)自动模式下,正常状态显示目前阀门开度,显示范围不受0.00~ 100.0 的限制;In Auto mode, display the current valve opening, the display range is not limitedfrom 0.00 to100.0( 3)标定模式下,各显示详细含义见标定功能说明;In calibration mode the specific meaning refer to the function description.3、状态 LED 显示说明Status LED display description( 1)OPEN:电动履行器控制输出电路“开”输出有效;Electric actuator control output circuit “opening ”output is effective ( 2)SHUT :电动履行器控制输出电路“闭”输出有效;Electric actuator control output circuit “ closing output” is effective ( 3)MANU :定位器处于手动模式;Locator is in manual mode( 4)AUTO :定位器处于自动模式;Locator is in Auto mode4、用户标定LED 显示说明User calibration LED display description( 1)DRTA :正相标定,即4mA 对应阀门全闭,20mA 对应阀门全开;Normal phase calibration, 4mA corresponds to the valve fully closed,20mAcorresponds to the valve fully open( 2)RVSA :反相标定,即4mA 对应阀门全开,20mA 对应阀门全闭;RP Calibration, 4mA corresponds to the valve fully closed, 20mA corresponds tothe valve fully open( 3)OPEN:无输入信号时,阀门自动调至全开;No input signal, the valve automatically transferred to full open ( 4)STOP:无输入信号时,阀门自动停在目前地点;No input signal, the valve automatically stops at the current location ( 5)SHUT :无输入信号时,阀门自动调至全闭;No input signal, the valve automatically transferred to full closed.三、性能参数 ( Performance parameters)1、控制精度: 0.1% ~ 1.0% (可设置)Control precision: 0.1% ~ 1.0% (can be set)2、工作功耗: <10WWorking Power3、工作电压:沟通100~ 240VOperating Voltage: AC 100 ~ 240V4、电动履行器反应电位器:500 欧姆~ 10K 欧姆Electric actuator feedback potentiometer5、输入信号: 4~ 20mAInput signal6、输入阻抗: 250 欧姆Input impedance7、输出信号: 4~ 20mAOutput signal8、输出信号负载:≤450 欧姆Output Load9、环境温度: -20 ° C~ 70 ° CThe ambient temperature10、环境湿度:≤80% RHThe ambient humidity四、接线说明 ( wiring instructions)五、标定操作 ( calibration operation)在手动状态下,按住A/M 键 5 秒进入参数标定状态按A/M 键按▼键显示 F1-2 显示 F.1.-.2.按 A/M 键按 A/M 键最后确认相位按▼键显示 F2A1 自动标定按 A/M 键按A/M 键按▼键显示 F2H1 最小转角标定按 A/M 键按 A/M 键按▼键显示 F2H2 最大转角标定按 A/M 键按 A/M 键按▼键显示 F3-2 显示 F.3.-.2.按 A/M 键按 A/M 键最后确认模式按▼键显示 --05 显示 -.-.0.5.按 A/M 键按 A/M 键最后确认精度退出标定状态,答复到正常运转状态按▼键选择相位模式按A/M 键显示 F2A1按A/M显示 F2A1按A/M显示 F2A1按▼键无信号模式按A/M 键按▼键改变精度按A/M 键In manual mode, hold down the A / M button for 5 seconds to enter calibration statusPress A / Mpress ▼press ▼Display F1-2Display F.1.-.2. Select Phase Mode Press A/M keyFinal phase confirmationPress A/MPress A/Mpress ▼Display Press A/MDisplay Press A/MF2A1F2H1Automatic calibrationDisplay F2A1Press A/Mpress ▼Press A/MMinimum angle calibration Display F2A1Press A/MPress ▼Press A/MDisplay F2H2Minimum angle calibration Display F2A1Press A/MPress A/Mpress ▼press ▼Display F3-2Display F.3.-.2.No signal mode Press A/MPress A/MPress A/MFinal confirmation modePress ▼Press ▼Display --05Display -.-.0.5.Change the precisionPress A/MFinal accuracy confirmationPress A/MPress A/MOut of calibration status, return to normal operating state1、标定模式进入:手动模式下,按A/M 键并保持 2 秒,将进入标定模式;Enter the calibration mode: in manual mode, press A / M key and keep 2 seconds, will enterthe calibration mode2、相位标定:Phase calibration:(1)显示目前实质相位设置,如是正相模式则显示“F1- 2”,反相模式则显示“ F1- 1”,相应标定 LED 也会被点亮。
宝德8692型定位器-快速入门中文说明书

正确使用
警告!
如不正确使用 8692 / 8693 型定位器,则可能对人体、附 近的设备以及环境造成危害。
• 该设备不可用于室外。 • 该设备不可暴露在直射阳光下。 • 该设备只能与经 Bürkert 认可和推荐的第三方设备及
组件配套使用。 • 由于其可能的应用范围较广,请确认该定位器是否适
空! 触电危险! 伸手到设备内部具有触电危险。 • 伸手到设备内部之前,请先切断电源并确认,以防止
重新启动! • 遵守电气设备适用的事故预防和安全规则!
警告! 由于意外启动而导致的受伤危险。 • 采取适当措施防止该设备意外启动!
6
5
警告! 安装和维护过程中可能导致危险。
• 只能由获得授权的技术人员采用合适的工具进行安装 与维护!
或站在其上。)
• 不要对该设备的外壳作任何外部修改。不要将其外壳或 螺钉等进行喷涂。
根据 8692 型和 8693 型定位器的使用说明、使用条件、 允许的参数(参见本快速入门中和相关气动阀资料中的 技术参数一章),确保该设备无故障运行并具有较长的 使用寿命。
4
基本安全说明
危险! 高压危险! • 拆卸阀门与管道之前,请先关闭压力入口并将管道排
过程设定值
POS %
XXX
MENU INPUT CMD MANU
CMD %
XXX
MENU POS TEMP MANU
TEMP *C
XX.X
MENU CMD INPUT
显示阀门执行机构的 实际位置 (0 – 100%)
显示阀门执行机构的 设定位置 (0 – 100%)
定位器内部的温度 (°C)
XXX SP
功能
宝德阀门定位器
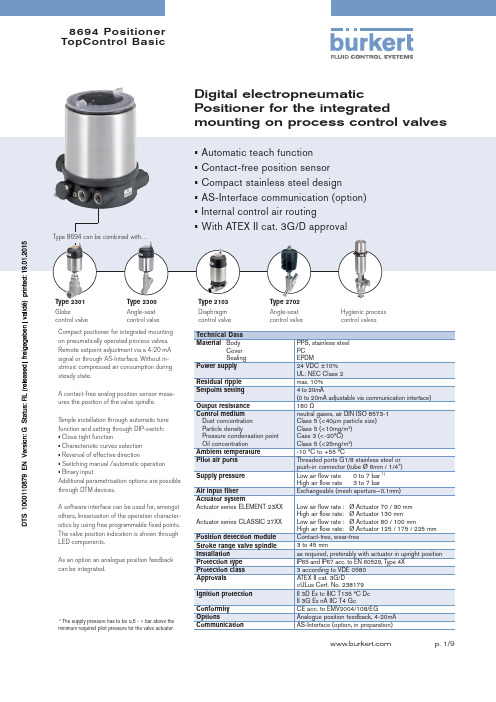
8694 Positioner TopControl BasicType 2301Globecontrol valveType 2300Angle-seat control valveType 2103Diaphragmcontrol valve Type 2702Angle-seat control valveHygienic process control valvesDigital electropneumaticPositioner for the integratedmounting on process control valvesCompact positioner for integrated mountingon pneumatically operated process valves. Remote setpoint adjustment via a 4-20 mA signal or through AS-Interface. Without in-strinsic compressed air consumption during steady state.A contact-free analog position sensor meas-ures the position of the valve spindle.Simple installation through automatic tune function and setting through DIP-switch:• Close tight function• Characteristic curves selection • Reversal of effective direction• Switching manual /automatic operation • Binary inputAdditional parametrisation options are possible through DTM devices.A software interface can be used for, amongst others, linearisation of the operation character-istics by using free programmable fi xed points. The valve position indication is shown through LED components.As an option an analogue position feedback can be integrated.Type 8694 can be combined with…• Automatic teach function • Contact-free position sensor • Compact stainless steel design• AS-Interface communication (option)• Internal control air routing• With ATEX II cat. 3G/D approval1)The supply pressure has to be 0,5 - 1 bar above the minimum required pilot pressure for the valve actuator.Technical Data Material Body Cover Sealing PPS, stainless steel PC EPDMPower supply 24 VDC ±10%UL: NEC Class 2Residual ripple max. 10%Setpoint setting4 to 20mA(0 to 20mA adjustable via communication interface)Output resistance 180 ΩControl medium Du s t concentration Particle den s ityPressure condensation point Oil concentration neutral gases, air DIN ISO 8573-1Class 5 (<40μm particle size)Class 5 (<10mg/m 3)Cass 3 (<-20°C)Class 5 (<25mg/m 3)Ambient temperature -10 °C to +55 °CPilot air ports Threaded ports G1/8 stainless steel or push-in connector (tube Ø 6mm / 1/4”)Supply pressureLow air fl ow rate 0 to 7 bar 1)High air fl ow rate 3 to 7 barAir input fi lter Exchangeable (mesh aperture~0.1mm)Actuator systemActuator series ELEMENT 23XX Actuator series CLASSIC 27XX Low air fl ow rate : Ø Actuator 70 / 90 mm High air fl ow rate: Ø Actuator 130 mm Low air fl ow rate : Ø Actuator 80 / 100 mm High air fl ow rate: Ø Actuator 125 / 175 / 225 mm Position detection module Contact-free, wear-free Stroke range valve spindle 3 to 45 mmInstallation as required, preferably with actuator in upright position Protection type IP65 and IP67 acc. to EN 60529, Type 4X Protection class 3 according to VDE 0580ApprovalsATEX II cat. 3G/DcULus Cert. No. 238179Ignition protection II 3D Ex tc IIIC T135 °C Dc II 3G Ex nA IIC T4 GcConformity CE acc. to EMV2004/108/EGOptionsAnalogue position feedback, 4-20mA CommunicationAS-Interface (option, in preparation)Technical data - cont.Ordering information for TopControl-Control valve systemsA complete TopControl-Control valve system consists of a TopControl Basic Type 8694 and a process valve Type 23XX or 27XX . The following information is necessary for the selection of a complete control valve:•Item no. of the Positioner TopControl Basic Type 8694 without process valve, see ordering chart on p. 3•Item no. of the desired process valve Type 23XX or 27XX (see separate datasheets, e.g. 2300, 2301 or 2702, 2712, 2730)•Note: TopControl-Control valve systemWhen you click on the orange box "More info." below, you will come to our website for the resp. product where you can download the datasheet.2301 2702 Globe control v v e control v v e-I Customised attachmentOrdering chart Type 8694 (other versions on request)&URTHERôVERSIONSôONôREQUESTOrdering chart adapter kit(has to be ordered separately)Ordering chart accessoriesengineering supportApprovals FMAdditionalPush-in pilot air ports (tube Ø 6mm / 1/4”)Note : All non-ATEX versions are UL approved.MaterialsDimensions [mm]Mounting on third party hygienic process valvesConnection optionsMultipole connectionConnection cable gland12*3*4567Screw terminal connections* Option onlyConnection options (cont.)Connection AS-InterfacePlug layout: from front looking at the pins, the solder is behindBus connection without external power supplyBus connection with external power supply (on request)M12 4-pin plug assembled to 80cm cable and flat cable clipScrewsM12 plug-in con-nector branch circuitSignal flow diagramPosition control loopTopControl Basic functions• X.Tune function for automatic start-up • Linear• Close-tight function • Reversal • Switching • Binary input• Parametrisation of the device through Pact-Ware/DTM main functions:• Setpoint value selection (0/4-20 mA)• Postion controller parametrisation • Programmable stroke range limit • Limitation of opening/closing time • Safety position defi nition • Signal error detection• Binary input confi guration • Analogue output confi guration position setpoint/feedback• Setting setpoint/actuator direction (rise/fall) • Reset deviceSchematic diagram of the TopControl BasicTo fi nd your nearest Bürkert facility, click on the orange boxIn case of special application conditions,please consult for advice.Subject to alteration.© Christian Bürkert GmbH & Co. KG1412/7_EU-en_00895044Input for position set-point value 1)4 – 20 mA 2)0 – 20 mA Binary input24 V DC Communications interfacePositionerAnalogposition feedback (Optional)I n p u t sO u t p u t sP o w e r .Operationor optional bus connection AS interface Default setting。
GPS12翻译版说明书
GPS12使用手册首先感谢您选择了GARMIN GPS12,这是一款使用简单,携带方便的GPS导航仪。
其致力于长时间提供优质的导航服务和良好的人机互动。
为了更好地使用本产品,请仔细阅读使用说明书!为了方便理解,本说明书分为四个部分:简介部分:对操作手册一些专业术语简要概述;入门部分:介绍了本产品的基本特征,简述了利用GPS12快速定位的方法;参考部分:说明了GPS12的先进功能及操作细节;附录部分:包含初始化说明和其他多个操作,如地图基准,时间偏移,索引。
在开始使用GARMIN GPS12之前,请仔细检查以下的几个地方:如有缺失任何部件,请立即与经销商联络。
标准配件:GARMIN GPS12;使用说明书;腕带;快速使用手册。
经销商应提供的配件有:GARMIN GPS12包;旋转接头;外接天线;电源/数据线。
我们希望本产品能尽可能满足您的导航需求,我们将尽我们最大的努力让其成为一款优秀的户外设备。
IGPS系统是美国开发的一套系统,其负责该系统的维护与准确性。
该系统如有变化将会影响所有GPS设备的准确性及使用性能。
虽然GPS12是一种精密电子导航系统(导航设施),但是如果误操作或者误解其用途,那么该系统将不再安全。
个人使用GPS12一些要求:为了减少不安全操作的风险,应仔细阅读和理解本操作手册的各方面并利用模拟系统进行操作练习。
在实际使用时,应结合其他导航设备包括从其他助航设备,目视瞄准,地图等信息仔细比较GPS12的信息显示。
出于安全考虑,须在继续航行之前解决任何误差。
注意:此装置符合FCC的第15部分对家庭或办公室使用的B类数字设备的限额要求。
它已经过测试,符合所有必要的FCC标准(FCC:全称美国联邦通讯委员会Federal Communications Commission)。
本产品通过无线电进行通信,如不按其操作规程使用,则会对信号的准确性有很大的影响。
当然,在按照规则合理使用设备时,也不能排除其他设备对本产品的干扰,当遇到干扰时,可以通过重启来恢复使用,当然,远离干扰源或连接该设备到其他的系统也是避免干扰的有效措施。
智能定位器安装操作说明书

TZID-C 智能定位器安装及操作说明书ABB (中国)自动化有限公司仪器仪表总部Tel: 010 8456 6688 Fax: 010 8456 7650气路连接●使用与定位器气源端口处标识的标准接口连接气源●连接定位器的输出与气动执行器的气缸电气连接根据下列接线端子图以及设计要求进行相应的配线(一般只需+11,-12,+31,-32)+11 -12 控制信号输入端子(DC4---20mA,负载电阻Max.410欧姆)+31 -32 位置返馈输出端子(DC4---20Ma,DCS+24V供电)+41 -42 全关信号输出端子(光电耦合器输出)+51 -52 全开信号输出端子(光电耦合器输出)+81 -82 开关信号输入端子(光电耦合器输入)+83 -84 报警信号输出端子(光电耦合器输出)调试步骤1. 接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2. 接通4---20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3. 检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须):●按住MODE键。
●并同时点击?或?键,直到操作模式代码1.3显示出来。
●松开 MODE键。
●使用?或?键操作,使执行器分别运行到两个终端位置,记录两终端角度●两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在 -28o--- +28o 之内。
角行程应用范围在 -57o--- +57o 之内。
全行程角度应不小于25o4. 切换至参数配置菜单●同时按住?和?键●点击ENTER键●等待3秒钟,计数器从3计数到0●松开?和?键程序自动进入P1.0配置菜单。
5. 使用?和?键选择定位器安装形式为直行程或角行程。
智能阀门定位器说明书

此界面是参数设定状态的第一界面。项号10表示直行程执行器。如果执行器为角行程执行器,则用户按向上键进入下一界面,表示角行程执行器。按向下又回到直行程执行器设定界面。退出执行器类型设定界面,按功能 + 向上键,进入执行器正/反作用设定界面。执行器类型则为退出时界面设定的状态。
2.1.3 位置变送电流输出模块报警及限位传感器模块
2.1.5 气动连接模块
02
气动连接
2-1-5 外接气源示意图
行器进气排气流量调节
1为执行器进气流量调节阀, 2为执行器出气流量调节阀
01
单作用及双作用执行器作用压力输入口Y1 位置反馈作用连杆 供气动力气源输入口Dz 具有消音作用的消耗气体排出口E
设定方法与定位器类型设定相同。项号11为正作用/反作用设定界面。按功能+向上键,系统退出执行器正/反作用设定,进入阀门气开气关设定界面。按功能 +向下键 进入10号菜单。以下所有菜单的转化以此类推,不再重复说明。 正作用表示4—20mA对应于0—100%行程。 反作用表示4—20mA对应于100—0%行程。
3.5.2.3 阀门定位器参数设定及初始化操作 1. 执行器类型设定:直行程/角行程,系统默认为直行程。 2.执行器正/反作用设定。默认为正作用
阀门气开、气关特性设定 气开型阀门设定,项号为12 型阀门设定,项号为12 特性曲线设定 定
2.1.1 主板
定位器当前位置通过2线制4~20mA输出反馈。一个数字输出表示一组故障信息,这两个报警输出电路与其他电路是隔离的。两个可调整限位位置的数字量输出通道。 2.1.4 现场总线扩展模块 在现代仪器仪表中现场总线技术的应用越来越广泛。然而,由于现场总线的多样性和复杂性,因此为了适应不同的系统就要配置不同的现场总线系统:PROFIBUS 、INTERBUS、CANBUS 总线、FF 总线、HART 总线。目前,我们能够提供HART总线通讯选择板卡。
宝德8032流量开关说明书

8032 型分体式流量控制器操作手册目 录8032 型分体式流量控制器1安全说明 (2)1.1使用 (2)1.2安装调试注意事项 (2)1.3符合的标准 (2)2产品说明 (3)2.1结构 (3)2.2测量原理 (3)2.3标准供货 (3)2.4附件 (3)3技术参数 (4)4安装 (5)4.1安装建议 (5)4.2安装 (5)4.3电气连接 (5)4.3.1连接器 (5)4.3.2控制器M12连接器接线 (6)5编程 (7)5.1一般建议 (7)5.2功能 (7)5.3编程键 (7)5.4缺省设置 (7)5.5正常模式 (8)5.6可能的开关模式 (8)5.7校正模式 (9)5.8模拟模式 (10)6维护 (11)6.1清洗 (11)6.2故障信息 (11)7附录 (12)7.18032易连接举例 (12)7.28032控制器标签说明 (12)7.3流量-流速-通径图 (13)1.1使用8032控制器仅适用于测量液体的流量制造方不负任何责任关于该仪表的保证条款也将无效1 安全说明始终遵守标记有该符号的安全说明不允许用户接触仪表内部的电缆请与贵地区的宝得分销商联系1.2安装调试注意事项则不能防电击只能使用化学性质兼容的产品来清洁该仪表避免该控制器受电磁干扰1.3安装调试注意事项电磁兼容性(EMC): EN 50 081-1(1992), 50 082-2(06-1995)安全性: EN 61 010-1(1993,A2-1995)抗振性: EN 60068-2-6(09-1995)抗震性: EN 60068-2-27(1987)8032 型分体式流量控制器2 产品说明2.1结构该分体式流量控制器为电子模块并且与远程的流量传感器相连激活报警器或建立一个控制回路2.2测量原理该8032型分体式流量控制器检测远程流量传感器的脉冲信号该脉冲信号的频率与流量成正比(f=K.Q,f为频率Hz Q为流量:升/秒)´ý½ÓÏß5针M12插孔连接器待接线4针M12插头连接器3 技术参数一般特性重复性防护等级(外壳)电气特性安装等级绝缘强度电源最大电流消耗极性反向保护晶体管输出短路保护推荐的电缆类型脉冲输出电气连接NPN/PNP 输出式材质外壳材质前面板支架环境环境温度相对湿度尺寸(mm)0.4%连接器插好并固紧时IP6522300VAC与远程传感器有关:750mA不带负载最大700mA ×î´ó30VDC ¿ØÖÆÆ÷µçÔ´µçѹ¾§Ìå¹ÜÊä³öʽÓÐÆÁ±ÎµçÀÂ远程传感器连接电缆最大导线截面积0.5mm2频率范围:2-400Hz 脉冲输出5针M 12插孔连接器不在标准供货范围之内P VC <80%8032 型分体式流量控制器远程传感器804080208030其它电源18-30 VDC 12-30 VDC 12-30 VDC min.12 VDC max.30 VDC5针M124针M124,5 V < U1 < 5 V 0 V < U2 < 0,5 V54.262128013.54.1安装建议4 安装-选择合适的支架位置- 如图所示将控制器插入支架中强酸或浓酸碱类 脂肪族酮类氧化剂和氯化物请与宝得分销商联系始终确认切断电源采用:- 工作温度高于+80¾-¹ýÂ˲¨ºÍÎÈѹµÄ- 1A 保险4.3电气连接5针M 12插孔连接器不在标准供货范围内订货号不在标准供货范围内参见4.3.25编程4.3.2M12连接器接线接收器+电源(如PLC )针脚1234M 12电缆可按需提供针脚编号与导线颜色之间的关系订货号438 680µ¼ÏßÑÕÉ«×Ø°×À¶ºÚ»Ò8032 型分体式流量控制器(*)为防止电磁干扰并将该电缆的两端分别接到同电位的地5 编程5.1一般建议记住您设置的所有参数都可能会影响工艺过程5.2功能该仪表有三种工作模式从正常模式可进入校正模式和模拟模式单位在线校正滤波器模拟方式输入一个理论流量值来测试校正模式中设置的参数5.3编程键显示开关输出状态确认所选功能选择字符显示测量值和设定值4位字母数字混合显示0-95.4缺省设置首次通电时流量单位O LO D EL滤波器棒图下限棒图上限l/s迟滞模式OLO OHIOLO OHI OLO OHI OLO OHI85.5正常模式返回前一个功能同时按这些键显示实际流量显示下限值(OLO )显示上限值(OHI)至下一个功能5.68032可能的开关模式迟滞模式检测到一个限值就改变状态(流量增加时:量减少时:检测下限(OLO))Ö»Óе±ÏÞÖµ(OHL 或OLO )超过了D E L 延时时间后流量和开关模式不同时5 编程5.7校正模式改变流量单位(1/s1/h m3/h Ga/min至下一个菜单也被参见第8-下限(OLO)和上限 (OHI)开关限值-开关模式是否反向 (INV,参见第8页)-开关动作前的延时 (DEL,单位为秒)确定的最小(BGLO)(BGHI)值将8032控制器与阀门相连接显示器显示<<YES TEAC>>时按键并打开阀门:这时显示器上的<<TEAC>>信号闪烁再按键返回(END)正常模式显示温度0表最高的滤波等级108032控制器设置:将校正模式中设置的数值填在以下的表格中:5 编程单位模式限值反向延时滤波棒图日期签名迟滞模式:窗口模式:5.8模拟模式扩展板(EXT)功能未用返回前一个菜单至下一个菜单输入一个流量值(S IM )并按ENTER 键后测试开关限值UNIT K FAC Win.**OLO OHI Yes No DEL(s)FILTBGLO BGHI8032 型分体式流量控制器K 系数Hyst.* *同时按 键可移动小数点。
宝德角座阀操作说明

操作说明BedienungsanleitungDE服务说明典型值2000 INOX2/2-Wege Schrägsitzventil2Inhaltsverzeichnis1模具BEDIENUNGSANLEITUNG ............................................... . (4)1.142 BESTIMMUNGSGEMÄßEVERWENDUNG ............................................... ......... . (5)2.152.2Vorhersehbarer Fehlgebrauch53 GRUNDLEGENDESICHERHEITSHINWEISE ............................................... . (6)4汇报HINWEISE ............................................... ........... (7)4.174.2Gewährleistung74.37585.1汇报85.2Eigenschaften85.2.185.3Vorgesehener85.3.16和技术DATEN ............................................... .............. .. (9)6.196.1.1Temperaturbereiche 96.1.2106.2汇报和技术Daten116.2.1116.2.2Werkstoffe 116.2.3116.2.4116.2.5Einbaulage 117 AUFBAU北达科他FUNKTION .............................................. ............ .. (12)7.1Aufbau127.2Funktion127.2.1127.2.2Anströmung温特 1238蒙太奇138.1138.2VOR DEM138.2.1Vorbereitende 138.38.4Pneumatische169INBETRIEBNAHME ................................................ .... . (17)9.11710WARTUNG,REINIGUNG ............................................... .......... (18)10.11810.21810.2.11810.2.2Verschleißteile DES 1810.2.31810.3Empfohlene1910.3.1Produktbezeichnungen和 1911INSTANDHALTUNG ................................................. ... (20)11.1Austausch DES20122413ERSATZTEILE ................................................. ...... ............................................ 。
827智能定位器使用说明书

827系列智能阀门定位器随着计算机、控制、通讯、网络等技术的发展,计算机控制系统逐步从集散系统(Distributed Control Systen,DCS)走向以现场总线位基础的分布式现场总线控制系统(Fieldbus Control System,FCA)。
827智能总线阀门定位器为满足现场总线控制需要而设计,广泛应用于石化、冶金、化工、电力、轻工、炼油场合。
827智能阀门定位器让调节阀拥有大脑和灵魂!通常安装和调试阀门定位器总是花费许多时间,827智能阀门定位器使得这一切变得简单容易。
尤其是其结构紧凑无外接管路地和812系列气动执行器的连接创建了无管路的快速安装。
其独到的构造改变了多年来定位器安装的潮流。
它可以将阀位变送器集成在定位器内部,也可以将限位开关集成在定位器内部,有效地简化安装和配置。
其可以简单地安装到任何阀门上,通过友好界面,快速设置,自动标校和自动整定。
其汉化的语言界面无以伦比的性价比将引起定位器的革命性潮流。
一、概况827系列智能阀门定位器是一种新型智能阀门定位器产品,安装在气动执行器上具有丰富功能,可实现即时通讯,能直接到调节器的4-20mA输出回路上。
定位器接收标准电流信号或计算机信号,驱动气动执行机构使阀门达到给定位置。
智能定位器所有参数的调整由电子模块进行全数字化运算和操作。
定位器底座和壳罩采用能够适应工厂中恶劣环境的轻质合金制造,并进行了防腐处理,其安装连接附件均采用经过钝化处理的不锈钢材质,具有高的使用寿命。
827智能型定位器以它精确的外观设计、模块化内部结构、非常方便的调试及维护而脱颖而出。
827型智能定位器,用于气动直行程或角行程执行机构。
它的核心是微处理器CPU,所有程序的处理运算皆在此。
输入信号及位置反馈经过12位20ms采样的A/D转换器进行处理,从而保证了信号处理的精度及快速性。
CPU的供电直接取自输入信号。
操作程序包括用于自动调整参数的自整定过程及自适应控制程序,用于精确定位的优化控制操作。
电动调节阀智能定位器使用说明书
HKPS-MODBUS电动调节阀智能定位器使用说明书一、概述HKPS-MODBUS电动调节阀智能定位器(以下简称定位器)是和电动执行机构配套使用的。
具有体积小,可靠性高,具有MODBUS通信功能等特点,是在HKPS-ASM定位器基础上的改进产品,该定位器将控制执行机构的4~20mA电流信号,与执行机构当前位置信号进行比较,并根据偏差情况,控制电动执行机构开或关动作,使执行机构位置与输入信号平衡。
该定位器还具有手动功能,能满足更多用户现场调试的需要。
本手册包括HKPS-MODBUS技术指标,接线端子定义,按键和红外遥控器的使用方法等。
用户在使用HKPS-MODBUS前,请认真阅读本手册,并按本手册提供的操作方法完成您的操作。
若在使用过程中有不清楚的地方或发现其他问题,请及时与本公司联系。
本公司将尽快回复,并解决您的问题。
TEL:(010)58859981/92FAX:(010)58859950HTTP:// E-MAIL: hart@谢谢您选用HKPS-MODBUS电动调节阀智能定位器。
二、HKPS-MODBUS电动调节阀智能定位器性能特点及接线2.1 性能与技术指标・控制精度:0.1%~5% 可通过按键设定・液晶显示:可显示阀门开度百分比、输入信号百分比以及故障状态时故障代码・通信方式:符合MODBUS协议通信・接收控制信号:MODBUS协议通信控制信号・控制信号:4 mA~20mA DC、MODBUS协议通信控制信号・工作温度范围:-20℃~+70℃・电源:单相交流电220V±10% 50Hz・输出开关触点容量:单项交流250V,5A・位置反馈电阻:0.5K~10KΩ・定位方式选择:手动/自动・安全位置选择:输入信号故障时电动执行机构所处位置可选择全开/全闭/停止在当前位置/运行到预设位置・自动校准:零位/满位2.2 接线端子定义HKPS-MODBUS型电动调节阀智能定位器面板示意及对外接线见图1。
智能阀门定位器说明书

图 3.5.2.2.2
显示界面(见图3.5.2.2.2)。在未初始化状 态中,按 用于充气,按 用于放气。
2.参数设定、初始化状态 不论在未初始化状态界面,还是在正常运营界面,顾客只需同步按下:
+ + 三个键3秒钟就能够进入到参数设定和初始化状态。
3.正常运营状态 参数设定、初始化成功后,定位器系统自动进入运营状态。
6.调整阀门定位器位置,使阀门定位器到达最高点和最低点时,反馈连杆 摆动角度不超出允许范围。
7.阀门定位器旳进一步调整见3.5节“初始化及投入使用”。
3.3 电气连接
图3-2-2 安装图
阐明:在进行电气连接前确 保全部旳可选择模块已安 装好。
注意:在进行电气安装时, 请参见有关原则,尤其在 危险旳环境中更要根据危 险
智能阀门定位器阐明书
安全注意事项
1.智能阀门定位器简介
2.定位器旳构造
2.1 定位器旳单元构成
3.操作阐明
3.1 外型连接尺寸 3.2 安装 3.3 电气连接 3.4 气动连接 3.5 初始化及投入使用
4. 主要技术参数
5.维护注意事项
6.故障诊疗
返回
安全注意事项
在使用本定位器之前,请务必仔细阅读下面旳安全 注意事项。
2.执行器正/反作用设定。默以为正作用 设定措施与定位器类型设定相同。项号11为
正作用/反作用设定界面。按功能+向上键,系 统退出执行器正/反作用设定,进入阀门气开气 关设定界面。按功能 +向下键 进入10号菜单。 下列全部菜单旳转化以此类推,不再反复阐明。
正作用表达4—20mA相应于0—100%行程。 反作用表达4—20mA相应于100—0%行程。
单作用定位器压力测量模块涉及两个压力表,能够显示输入、输出 气体旳压力。
gps使用说明书
目录第一章软件简介及简易操作流程 (1)1.1 道路版简介 (1)1.2 电力版简介 (5)1.3 软件简易操作流程 (9)第二章项目 (24)2.1项目信息 (24)2.2坐标系统 (25)2.3记录点库 (25)2.4放样点库 (26)2.5控制点库 (28)2.6电力点库 (29)2.7横断面点库 (30)2.8更新点库 (31)第三章 GPS (32)3.1连接GPS (32)3.2演示模式 (33)3.3位置信息 (34)3.4卫星信息 (35)3.5差分站信息 (37)3.6天线设置 (37)3.7基准站设置 (38)3.8移动站设置 (42)3.9远端设置基准站 (46)3.10接收机信息 (47)3.11数据调试 (48)第四章参数 (49)4.1坐标系统 (49)4.2参数计算 (52)4.3 点校验 (54)第五章工具 (56)5.1角度换算 (56)5.2坐标换算 (56)5.3面积计算 (57)5.4距离方位 (58)5.5间接测量 (58)第六章测量 (61)6.1碎部测量 (61)6.2点放样 (66)6.3线放样 (68)第七章道路 (73)7.1平面设计与文件编辑 (73)7.2纵断面设计与文件编辑 (78)7.3横断面设计与文件编辑 (78)7.4道路放样 (80)7.5横断面采集 (82)第八章配置 (84)8.1软件配置 (84)8.2配色方案 (84)第九章符号释义 (87)9.1一般符号 (87)9.2按钮图形 (87)9.3当前位置信息栏 (88)9.4电量状态栏 (88)9.5卫星状态栏 (89)9.6解状态/质量栏 (89)第十章 GIS+手簿及与电脑通讯 (90)10.1 GIS+手簿 (90)10.2安装GIS+手簿连接软件 (92)10.3 GIS+手簿与电脑通讯 (96)第十一章附录 (99)11.1键盘输入 (99)11.2点信息录入 (99)11.3快捷键 (100)11.4 文件格式(道路文件) (100)11.5文件格式(点库) (102)11.6 程序结构与路径 (103)11.7 V8/v9简易硬件操作 (104)11.8 仪器常见问题及解决方法 (107)第十二章电力 (108)12.1电力作业流程简介 (108)12.2 电力勘测 (109)12.3 塔杆放样 (116)12.4 Hi-Convert数据格式转换软件 (119)第一章软件简介及简易操作流程1.1 道路版简介Hi-RTK Road软件是中海达公司最新开发出的一款基于道路施工测量的多功能手簿软件, Hi-RTK Road软件基道路工程测量行业的应用需求,广泛征集行业客户的建议,集实际工程经验和GPS作业优势于一体,是中海达测绘专业开发人员和广大客户智慧的结晶。
多功能定位器 使用说明

多功能定位器使用说明目录第一章序言 (3)一、概述 (3)二、注意事项 (3)第二章设备介绍 (3)一、组成部分 (3)二、产品特征 (3)三、产品规格 (4)1 技术规格 (4)2其他 (4)第三章使用准备 (4)一、附件 (4)二、给电池充电 (5)三、SIM卡安装 (5)第四章基本功能具体对应指令及操作方法 (6)1.位置查询 (6)(1)短信查询 (6)(2)平台查询 (6)2.中心号码设定 (7)3.双向通话功能 (7)5.监听功能 (7)6.定时上传间隔设定 (8)7.修改密码功能 (8)8.低电压报警功能 (8)9.设置接入点指令 (8)10.电子围栏功能 (8)(1)GPS围栏功能 (8)(2)GSM围栏功能 (8)(3)围栏读取功能 (9)(4)取消围栏功能 (9)10.辅助功能: (9)注意事项: (9)第一章序言一、概述该多功能定位器是GSM与GPS技术的完美结合。
这款产品以它精密的尺寸和简洁的外观展示了在GSM和GPS领域的先进工艺,是通讯产品和GPS定位服务结合的典型设计。
作为一个专业的安全及定位公司,我们将提供给您更多更好的产品和服务。
在您使用之前,请花几分钟时间来阅读这份说明以便了解操作细节及获得更好的服务。
二、注意事项1、请仔细阅读这份手册并用正确方法操作,以防止任何错误。
2、本手册仅供参考,如有一些内容和操作步骤与实际产品不同,请依照实际产品。
3、该产品默认的用户密码是0000.第二章设备介绍该多功能定位器是一种由GPS和GSM/GPRS模块组成的个人远程定位装置,它尺寸灵巧、精确度高。
在GPS卫星的基础上,在动态的条件下提供给您精确无误的位置信息。
您可以利用这些特征来保护和寻找老人和小孩。
而且您可以使用他作为安全目的及其它目的,诸如需要远程定位来保护财产安全和动物跟踪。
一、组成部分1、内置GPS模块2、互联网定位服务中心,用于收发定位信息二、产品特征●GPS个人或车队定位●GSM /GPRS modem,支持两种频率组合900/1800(850/1900)MHz (可供选择)●高灵敏度,新工艺及最先进的GPS芯片●即使在微弱的信号下也能精确定位●在有限的空间下比如城市偏狭地带也能很好工作●紧凑的尺寸,比名片还小,便于隐藏●低耗能●快速捕捉信号●支持单一定位和连续跟踪●支持报警和远程监听●支持快速拨号按钮●支持短信和互联网查询位置信息●可以在不打扰被跟踪者的情况下监听,实时跟踪●对持有人通过电话或手机短信定位●在紧急情况下可按SOS按钮精确定位三、产品规格1 技术规格GSM模块GSM850/1900或GSM900/1800MHz两种组合GPS芯片最新的GPS芯片GPS灵敏度-159dBmGPS中心频率L1, 1575.42MHzGPS定位精确度5-25米GSM定位精确度100-500米速度精确度0.1米/秒时间精确度与GPS同步默认数据WGS-84热启动1秒暖启动38秒最大海拔高度18000米最大速度515米/秒重力加速度﹤4g2其他工作温度-20---65℃湿度5%---95%尺寸80×49×16 mm电压可充电800mAh电池电源DC5V待机时间大于48小时按钮一个SOS紧急按钮:紧急求助;CALL1,CALL2,接听,挂断第三章使用准备一、附件1、主机2、USB数据线3、充电器4、耳机线(选配)二、给电池充电在使用跟踪器前,请先通过USB充电线将电池充电至少4小时。
定位器操作说明
(三)注意事项
• 压缩空气气源要保持洁净,干燥 • 电气接口接线后密封可靠,无松动 • 定位器调试完成后,外壳盖紧 • 如果个别位置无法排除外界杂质进入定位
内部,可参考做如下图处理
谢谢!
A. 基础菜单与完整菜单之间的切换 基础菜单(basic menu)只有 5 项,完整菜单 (full menu)有 9 项。在 shift menu 里面完 成基础与完整菜单之间的切换。
B. 切换中文菜单 出厂默认是英文菜单,可以在设定(setup) 里面找到外观(Appearance),再找到语言 (language),从中选择中文(chinese)。 按 OK 键确认选择。界面瞬时换成中文。
自动调试
• 首先切换到离线状态,此时屏幕左上角有竖条光标在闪烁,
表示定位器处于已处于离线状态,此时不接受 DCS 信号 控制。同时按住上,下两键 5 秒钟,此时三个灯交替闪烁, 松手,此时已开始自动校验。校验结束会停留在黄灯闪烁 (阀门处于开或者关的位置)或者绿灯闪烁(阀门处于中 间位置)。
• 或者进入校验(calibrate)菜单,选择自动校验(
• 方法如下: • 依次输入4,8,12,16,20mA,检查阀门位置是否一
一对应,连续按3次黄色按键,此时正反作用已切 换,重新输入4,8,12,16,20mA检验。
恢复出厂设置
• 在断电(也就是不接入信号)情况下,按 住黄色按钮,然后按照正负极接入信号 (直到三个灯被点亮,然后黄-红交替闪 烁),此时松开按钮,这时就完成了恢复 出厂设置。
4-20mA 输出信号校验
• 进入校验(calibrate)菜单,选择专业校验 (expert cal),进入传送(transm)。校 验传送低值(transm low)调整到 4mA 按 OK 键确认;校验传送高值(transm hi)调 整到 20mA 按 OK键确认。前提是需要给输 入接线柱 4mA 供电,同时输出接线柱串联 24V 电源和万用表测量输出。
OBD定位器中文说明书

GPS车载定位终端(GPS+GSM+GPRS)使用说明书请您在使用之前认真阅读使用手册,以便得到正确的安装方式及快速网上激活使用。
产品外观、颜色如有改动请以实物为准1. 技术参数1).GSM频段:850/900/1800/1900MHz2).GPRS:Class12,TCP/IP3).工作电压:9-36V DC4).工作电流:≈22mA (12vDC)5).工作电流:≈12mA (24vDC)6).GPS定位时间:冷启动≈38s(Open sky)暖启动≈32s热启动≈2s(Open sky)7).GPS定位精度:10m(2D RM)8).工作环境温度:-20℃~+70℃9).工作环境湿度:20%~80%RH10).外观尺寸:71(L)×49(W)×24(H)mm2.外观示意图3.终端状态灯指示3.1 后边LED(GPS信号的状态)GPS未定位时,此LED灯闪亮。
GPS已定位时,此LED灯长亮。
3.2 前面LED(GSM信号的状态)GSM信号正常时,此LED灯长亮。
无GSM信号时,此LED灯闪亮。
GSM指示灯没信号闪亮(0.2秒/2秒),信号正常常亮;所有灯五分钟后自动熄灭,有电话进来或电源接通后,灯重新工作,五分钟后自动关掉。
4.GSM卡的安装方法4.1 安装前的准备工作4.1.1 产品检查,打开包装盒,检查终端型号是否正确,配件是否齐全,否则请联系你的经销商;4.1.2 SIM卡选择,终端需要插入一张GSM SIM卡,GSM卡的选择请参考经销商的意见;4.1.3 GSM的安装,用牙签或镊子按住GSM卡槽开关(黄色按钮),按住后会弹出GSM卡槽,将卡槽取出GSM卡按卡槽形状放入(金属面朝上),然后将已装好的GSM卡槽装回。
(如下图所示)4.1.4 此时可以接通外接9-36V电源注意:终端GSM卡不要装反;终端GSM卡需要开通GPRS功能,并确保终端GSM卡有资费;若您的GSM已开启要求输入 PIN码,请您参考您的手机用户手册将开机输入PIN码功能关闭;5.怎么找到车上的OBD接口位置把设备接于汽车OBD接口上即可,如下图所示;6.终端工作状态6.1 开机:终端上接电执行自动开机。
GPS操作规程
GPS操作规程一、引言GPS(全球定位系统)是一种通过卫星定位技术来确定地球上任何一点位置的系统。
本文档旨在提供GPS操作规程,以确保正确、安全地使用GPS设备。
二、适用范围本操作规程适用于所有需要使用GPS设备的人员,包括但不限于领导、工程师、技术人员等。
三、设备准备1. 确保GPS设备电池电量充足,或连接外部电源。
2. 检查GPS设备是否正常工作,包括屏幕显示、按键响应等。
3. 确保GPS设备已经接收到卫星信号,以获得准确的定位信息。
四、操作步骤1. 打开GPS设备电源,等待设备启动。
2. 在设备菜单中选择“定位”功能,进入定位模式。
3. 根据需要选择定位方式,包括单点定位、差分定位等。
差分定位能提供更高精度的定位结果,但需要连接差分信号源。
4. 在设备屏幕上查看当前位置信息,包括经度、纬度、海拔等数据。
5. 如果需要记录当前位置,可使用设备的标记功能,将当前位置标记保存。
6. 在移动过程中,可实时查看设备屏幕上的位置变化,以确保朝着正确的方向前进。
7. 如需导航至特定目的地,可在设备菜单中选择导航功能,输入目的地坐标或名称,设备将提供导航指引。
8. 在导航过程中,注意设备的语音提示和屏幕指示,按照指引行驶。
9. 如遇到信号干扰或设备故障,及时联系技术人员进行维修或更换设备。
五、安全注意事项1. 在使用GPS设备时,应注意周围环境,避免发生意外事故。
2. 不要在驾驶过程中频繁操作GPS设备,以免分散注意力。
3. 如需更换电池,请确保设备已关闭,并按照设备说明书操作。
4. 在户外使用GPS设备时,应注意防水、防尘等措施,以保护设备的正常工作。
5. 如需长时间使用GPS设备,建议携带备用电池或连接外部电源,以确保设备的持续供电。
六、故障排除1. 如GPS设备无法启动或显示异常,请检查电池电量、电池接触是否良好。
2. 如GPS设备无法接收到卫星信号,请确保设备在开阔的空旷区域使用,并检查设备天线是否正确连接。
宝德1067定位器中文

定位器操作手册1067型定位器目 录1引方 (2)1.1拆箱与检验 (2)1.2有关使用和安全方面的注意事项 (2)1.3电磁兼容性 (2)2说明 (3)2.1特性和可能的应用场合 (3)2.2结构 (5)2.3工作原理 (6)2.4安全位置 (7)2.5技术参数 (8)3安装 (9)3.1结构和安装 (9)3.3.1将定位器安装到带膜片执行机构(NAMUR)的连续调节阀上 (9)3.3.2将定位器安装到带活塞执行机构的2031型连续调节阀上 (11)3.3.3将定位器安装到带旋转式执行机构的连续调节阀上 (13)3.2流体接口 (14)3.3电气连接 (15)4操作 (16)4.1控制与指示器 (16)4.2操作界面 (17)4.3设置 (18)4.4过程控制 (19)4.4.1过程控制界面中LED和各键的含义 (20)4.4.2显示器 (20)4.5组态 (21)4.5.1附加功能 (21)4.5.2组态菜单 (22)4.5.3组态界面中各键的功能 (25)4.5.4基本功能与附加功能注释 (25)4.6无电源时手动操作 (34)4.7定位器的结构 (35)5维护 (36)出错信息 (36)1.1拆箱与检验请检查产品的完整性和无运输损坏参考号642292A-1操作手册1.2有关使用和安全方面的注 意事项本手册不包括任何保证条款为确保本定位器正常的功能和较长的寿命安装条件以及Data Sheet中给出的参数允许值应采取一些措施以防止因非故意行为而导致的对工艺的影响如定位器作为复杂控制系统的一部分操作只能由授权的经过培训的人员进行维修为了更好地发挥本产品所具有的许多优点维护和维修本定位器请仔细阅读本手册产品功能和使用安全要引起特别注意为符合该规范主机密码通过设置一个可自由选择的用户密码此外编好程的该4位主机密码在本页的底边给出主机密码:65682.1特性和可能的应用场合(概论)1067型定位器是用于气动连续调节阀的电气位置控制器一个电气系统和一个微处理器电子系统微处理器电子系统连续地将实际位置(实际值)与所需位置值(该值已由标准信号输入进行预设置)进行比较并将其结果输给位置控制器电气系统即修正实际位置膜片和旋转式执行机构的阀门和单作用或双作用阀门)Æä¹Ì¶¨·½Ê½ºÍ·´À¡/位置传感器不同采用旋转式电位计以外部线性电位器作为反馈/位置传感器除了位置控制外压力一个液晶显示器和三个键的键盘用于操作定位器并可通过手动驱动阀门如有必要图1 1067型定位器方块图位置控制器可选的附加功能分级界面操作特性0...10 V0...20 mA4...20 mA4...20 mA2.2结构定位器包括下列主要部件:-阀体和阀帽(铝)-测量阀位的内部反馈/位置传感器-处理和控制信号的微处理器/电子部件-控制连续阀的电磁阀-带流体接口的流体板-接线端子和电缆接头-显示器和键盘图2 带内部反馈/位置传感器的定位器剖面图带铰链铝质阀体和阀帽电子部件显示器和键盘手动操作连接端子电缆接头流体板流体接口电磁阀位置传感器轴内部反馈 /位置传感器NAMUR 接口图3 外部反馈/位置传感器在组合2中2.3工作原理图4为带活塞驱动连续调节阀的定位器的工作原理图图4 工作原理图阀的实际位置由反馈/位置传感器测得对应于偏差通过该脉冲控制用于定位连续阀的执行机构的进气和排气由内部过程控制器决定时并与被控制的实际过程值(如流量液位或温度)相比较(图4)1067就仅作为位置控制器(图5)Âö¿íµ÷ÖÆÆ÷½ÓÔÚ¿ØÖÆÆ÷µÄÊä³ö¶Ë控制电磁阀进气或排气存在正偏差时存在负偏差时该定位器既可用于单作用执行机构也可用于双作用执行机构可控制双作用执行机构的另外两个电磁阀它就成为主控制回路的一部分整个系统为连续控制(图6)反馈/位置传感器位置控制器过程控制器实际位置电磁阀传感器进气排气过程值(压力液位...)设定位置外部设定值过程设定值活塞阀图5位置控制图6过程控制2.4安全位置电源故障时2.5技术参数电气参数电源:功耗:所需值输入输入设定值用于位置或过程控制:过程信号输入(过程控制时):二进制输入:接线端子:气动参数控制介质:压力范围:空气流量进气阀:排气阀:稳态下空气消耗:接口:(1)当压力从6 bar降至5 bar时机械参数内部行程测量系统调节范围:外部行程测量调节范围:过程控制器参数比例调整值KP:复位时间TN:比率时间TV:起始操作点:安装和工作参数定位器外型尺寸:定位器材质:流体板材质:定位器重量:防护等级:工作温度:24 VDC<10W-标准信号 4...20 mA-标准信号 4...20 mA-标准信号 4...10 V-标准信号 4...20 mA可配置为常开或常闭触点1.5mm2端子两个PG9螺纹接头过滤润滑的或非润滑的0...6bar23Nl/min(1)25Nl/min(1)0Nl/min(1)G1/8上升:0...50mm0...99,990.5...999,90.0...99,90...100%125mmx80mmx80mm(WxHxD)铝阳极化处理过的Approx.1kgIP 650 (60)1067型定位器3安装3.1结构和装配1067型定位器可安装在各种连续调节阀上可采用带内部反馈/位置传感器(旋转电电位计)的组合13.1.1将定位器安装到带薄膜执行机构的连续调节阀(NAMUR接口)上配置配带薄膜执行机构的连续调节阀时定位器拧在膜片执行机构的<<lantern>>上(图7)aprox.65mm approx.95(115)mm主要尺寸:定位器宽度:高度:深度:125mm 80mm 80mm外部反馈/位置传感器直径:高度:图7安装到265型带薄膜执行机构的连续调节阀上安装安装弯管(图 10)用来将组合1的定位器安装到薄膜执行机构的连续调节阀(如 265型)上用垫圈7和螺钉8将销钉2固定在NAMUR 杆4的位置上将杆4和销钉放在定位器位置传感器的轴上然后用螺钉9固定杆图8 带NAMUR杆定位器后视图图9安装中杆的位置Parallel将带安装弯管1的定位器安装到薄膜执行机构上杆针与定位器的上边平行运动(图9)而定位器的后边与托架3平行运动用两个U形螺钉5-对于带管式lanterns的膜片执行机构3.1.2将定位器安装到活塞执行机构的2031型连续调节阀上配置配活塞执行机构的连续调节阀时定位器放在阀上并拧紧(图11和图12)ͼ11 安装到2031型带活塞执行机构的连续调节阀上安装将组合2的定位器安装到2031型带活塞执行机构的连续调节阀上图13)用来将组合2定位器安装到活塞阀(如2031型)上两个螺钉2应按以下步骤将定位器安装到 2031型活塞阀上(图 13):将一个O 型圈3放在安装板1驱动面的凹处将两个M5圆头螺钉4从驱动面穿到安装面这样下面的连接件即由O 型圈密封将定位器放在安装板上并用两个圆头螺钉4拧紧按以下步骤安装外部反馈/位置传感器(图13和图14):检查阀门执行机构(顶部)有一个O 型圈3ͼ12定位器后视图(变型2)从上面直接将位置传感器装到执行机构上拧入位置传感器并用扳手固紧使电缆出口位于所需位置松开位置传感器的盖子取出位置电缆7的插座并将其插入传感器外壳中(绿线接绿线褐线接黄线)Å¡½ôPG螺纹接头图13定位器安装图及外部位置传感器与2031型带活塞执行机构(NAMUR接口)的连续调节阀的安装图图14外部反馈/位置传感器用于宝得活塞阀(3.1.3将定位器安装到旋转式执行机构的2031型连续调节上配置配旋转式或角行程执行机构的连续调节阀时它的轴与旋转式执行机构(如摇臂阀)配合图15 安装到旋转式执行机构的连续调节阀上安装连接器(适配器)1用来将组合1的定位器安装到旋转式或角行程执行机构(如3210型另外可通过角行程执行机构生产厂获得应按以下步骤进行安装(图18)½«Á¬½ÓÆ÷1放在定位器反馈/位置传感器的轴上将定位器放在安装夹上用4x M6螺钉将定位器固定在安装夹上如果AUTOTUNE 功能开始后必须松开安装螺钉并将位置传感器的轴旋转180然后再拧紧安装螺钉重新做AUTOTUN E´ø°²È«¿×图17用于旋转式换行机构的连接器图18 将定位器安装到旋转式执行机构的连续调节阀上3.2流体接口P 口接压缩空气源(最大6bar)带旋转式执行机构的连续调节阀单作用双作用单作用3.3电气连接图20接线柱配置注意:PE 端子必须用一根尽量短的电线(最长30c m)与一个接地点相连输入U1(0...10V)输入I1(0/4...20mA)输入I2(4...20mA)输入阻抗220k 输入阻抗<1754.1控制与显示器向上向下4.2操作界面这种定位器有两种操作界面:1ÏÔʾÆ÷×Ô¶¯½øÈë´Ë½çÃæÊÖ¶¯×Ô¶¯ÔÚģʽÏòÉϼü¿ÉÒÔ´ò¿ª»òÕ߹رշ§ÃÅ设置界面在此界面中对定位器的基本功能进行初始化定义附加功能每次通电时过程控制界面此时按动键可以切换到模式手动/自动就会切换为4.3设置图21主菜单初始设置定位器与2632型角座控制阀联接完成后4...20mA或者0...10V):-进行执行机构与受控制阀之间的初始化自动适配定位器自动进入过程控制界面手动/自动由过程控制界面切换到这时显示器显示的是主菜单第一项在X-SENS 项中线性正弦曲线如果采用杠杆式传输方式正弦曲线因此L E V E RADDFUNCT 项仅在需配置某些附加功能使用AUTOTUNE 项对定位器进行自动参数编辑它包括以下功能:-匹配传感器的信号与控制阀的行程要进行AUTOTUNEÈ»ºó°´×¡ÊÖ¶¯/自动键5秒钟TU NRËæºó³öÏÖÉÁ˸µÄ×Ö大约持续30至120秒(闪烁时间根据执行机构的容积不同)ÏÔʾAUTOTUNE为了获得最佳精度如果AUTOTUNE 不能顺利完成见流程图向上键选择要进行设置的主菜单手动/自动在子菜单中通过向下再按一下键即可确认图22 主菜单中各选项的含义基本功能X-SENS-DIRECT -LEVER INPUT-4...20mA -0...20mA -0...10V ADDFUNCT AUTOTUNE END相关设置执行机构与行程测量系统之间信息转换的关系(工厂设置DIRECT)-线性关系-正弦曲线关系输入信号的规格-电流信号4...20mA -电流信号0...20mA -电压信号0...10V 附加功能的设置执行机构与受控阀的自动适配菜单结束1067型定位器4操作4.4过程操作4.4.1在过程控制界面中LED 和各键的含义要退出设置界面的主菜单E N DÈ»ºó°´Ò»Ï¼üÈ·ÈϺó¼üÖеÄÂÌÉ«L ED 灯亮时表示:自动模式键中的绿色L ED 灯灭时表示:手动模式-按手动/自动键小于5秒钟手动自动-按手动/自键大于5秒钟-在模式下PC O N TR L S ET PO I N TI N T ER显示时上中的一个持续上键(小于可以改变显示向上-在手动模式下按键可以关闭执行机构上键可以在这两种显示之间转换会有下列显示:过程变量的实际值:PV -(-99.9...999.9)过程变量的期望(设定)值:SP -(-99.9...999.9)阀驱动的实际位置:XPOS -(0...100%)阀驱动的期望(设定)位置:WPOS -(0...100%)按下过程控制器有效如果在组态时定义附加功能时上键中的一个持续具体为:松手后此时通过键可改变其大小;然后按键确认重复同样的操作四位数全部确认后显示执行机构的实际位置:XPOS-(0...100%)ģʽϵÄÏÔʾ¹ý³Ì¿ØÖÆÆ÷ÎÞЧ在手动状态下将持续显示实际过程值:PV -(-99.9...999.9)按住下并显示实际位置值:X P O S-(0...100%)当松开按着的键时手动模式的转换通过键实现如果按住向上键动作停止如果按住向下键如果在按住一个向上或向下键的同时可以使阀快速向先按的键所代表的方向动作都可以按键进入组态界面4.5组态4.5.1附加功能定位器的操作有严格的基本功能和附加功能区分通过设置这些功能如有近一步的位置或过程控制需求下表为附加功能列表图24附加功能附加功能 参数ACTUATE-SINGLEINTERNBOOST-DOUBLE CHARACT-LINEAR-1:25-1:50-25:1-50:1-FREE DEADBND-DBD CLTIGHT-CLT DIRECTN WPOS-RISE-FALLXPOS-RISE-FALL SPLTRNG-MIN-XMAX 描述执行机构功能单作用执行机构带外部增压阀-双作用执行机构选择输入信号和行程之间的转换特性曲线(校正特性曲线) -线性特性曲线-等比率特性曲线:1:25-等比率特性曲线:1:50-反向等比率特性曲线:25:1-反向等比率特性曲线:50:1-用户定义以%表示-设定输入信号的最大值二进制输入开4.5.2组态菜单由过程控制界面按住键5秒钟它由主菜单和附加功能菜单组成可以通过主菜单中的项进入如果需要通过选择附加菜单中的附加功能实现首先选择主菜单中的项手动/自动通过下然后按键确认同时会被扩展进主菜单中EN DFUN CT²¢·µ»ØÀ©Õ¹ºóµÄÖ÷²Ëµ¥²¢¿ÉÒÔ½øÐÐÉèÖÃÓëÓ¦ÓÃÐèÒªÔÙ½øÈë项按键*È»ºóÍ˳ö¸½¼Ó¹¦Äܲ˵¥¼´¿É°´Ï°´¼ü½øÐÐˮƽ·½ÏòÑ¡Ôñ°´Ï°´¼üSelection of item ADDFUNCTAdditional menuExpanded main menuReturn to expanded main menuConfirmation of selected additional functions for importation in main menuMain menuConfirmation of selected item图26 完整的组态菜单X-SENS DIRECT LEVERINPUT 4...20MA 0...20MA 0 (10V)ACTUATE DOUBLECHARACTLINEAR 1/251/5025/150/1FREE5100DEADBNDDBDCLTIGHT CLTDIRECTN WPOS XPOS ENDRISE FALLRISE FALLSPLTRNG MIN MAXX-LIMIT X-MIN X-MAXPCONTRL SETPOINT PARAM SCALE INTERN EXTERNKP TN TV X0X-TIMEOPN FAST OPN SLOWCLS FAST CLS SLOWSINGLE INTERN BOOSTENDDBDPV-H SP-L SP-HPV-L DP BIN-ININACTIVE SAFEPOSSPOS NORM OPN NORM CLSADDFUNCT AUTOTUNE ENDAOUTPUT BINARY CODE ANALOG NORM CLSXDXDONORM OPN BOOSTCODE MENU+M/A MENU4.5.3组态界面中各键的功能键:-向上滚动选择菜单选项-在菜单选项中增加数字值键:-向下滚动选择菜单选项-在菜单选项中减小数字值主菜单中使用键:-确认所选择的菜单项-确认设定值附加功能菜单中使用键:-确认所选择的附加功能项*¸ÃÏîÇ°标记将会消失4.5.4基本功能与附加功能注释X-SENS(工厂设定:DIRECT):阀的连续动作与行程测量系统之间信息转换类型其反馈信号与阀实际位置是线性关系D I R E C TLEVER:阀位与测量系统输入信号之间为正弦关系例如:Ty pe265带内部反馈/旋转电位计选项:40mA:输入信号类型为4...20mA00mA:输入信号类型为0...20mA00V:输入信号类型为0 (10V)图27 校正特性曲线ACTUATE (工厂设定:SINGLE,INTERN):阀执行机构的工作方式不带增压阀带增压阀CHRACT (工厂设定:LINEAR):用户指定的特性:该附加功能使用户可以选择一个阀门设定值(设定位置)和阀行程关系的转换特性曲线以Kv 值关于阀行程的关系表示一般有两种流量特性曲线:线性和等百分比相等的阀行程变化d s 产生相等的k v 值变化d K v(dKv=n lin ds)·§Ðг̱仯ds 对应于Kv 值的等百分比变化(dKv/Kv=n percent ds)¸ÃÇúÏßÒ²ÊܹܵÀÒò¶ø»áÆ«ÀëÁ÷Á¿ÌØÐÔÇúÏßͨ³£ÐèÌá³ö¶Ô¹¤×÷ÌØÐÔÇúÏß(如线性)的特殊要求有时需采用适当的方法来校正工作特性曲线1067定位器提供了具有多种特性曲线的转换元件可以设置一种线性和多种等百分比特性的曲线1:5050:1(参见2.7)»¹¾ßÓпÉ×ÔÓɱà³ÌµÄÌØÐÔÇúÏß¿É×ÔÓɱà³ÌµÄÌØÐÔÇúÏßSet positionP l u g t r a v e l自由编程的特性曲线的输入特性曲线是将设定范围按0...100%等分为21个间隔为5%的设定点而定义的但相邻两个设定点之间的行程差不能超过20%Ê×ÏÈÑ¡µ½F R E E子项手动/自动在它后面就是行程值为0(%)ϼü´Ó0至100%之间设定手动/自动而下一个设定点将会显示程序返回到CH AR AC T菜单图28编程设定的特性曲线示例Plug travel (%)Unit signal (%) Set position (%)Plug travel (%)Input with "Arrow" keysRestart pointDEADBND(工厂设定:DBD=0.5%):系统偏差的死区只有在系统偏差超过特定的死区范围时它能有效地保护伺服原理工作的阀最小由定义该功能使阀在控制范围以外关闭完全充满定义为100%设定范围:0.0...10%(如图30)图32 将一种信号范围分成2段设定范围DIRECTN (工厂设定:WPOS=RISE. XPOS=RISE):动作的方向XPOS 定义为:实际位置值和执行器AI 口供气状态之间的动作方向MAX=100%):范围分段0...20mA选用来控制一或多个定位器图31 动作方向1067型定位器4操作Input DIRECTN Setpoint WPOSI1U1(WPOS)0/4 mA 0 V RISE 0 %20 mA 10 V 100 %0/4 mA 0 V FALL 100 %20 mA10 V0 %Air supply DIRECTN Measure State A1XPOS (XPOS)Air exhaust RISE 0 %Air on100 %Air exhaust FALL 100 %Air on0 %0/4 mA Input signal20 mA0 V10 V air exhaustair onAir supply stateFALLRISEFALLRISESetpoint (mA)Setpoint rangepositioner 1Setpoint range positioner 2Plug travel (%)选项:OPN FAST:以最快速度打开阀;OPN SLOW:阀门打开时限速CLS FAST:以最快速度关闭阀CLS SLOW:阀门关闭时限速PCONTRL(过程控制):过程控制器组态TV:(微分时间)设定范围:0.0...999.9(工厂设定:0)XO:(过程控制器的起始工作点)设定范围:0...100%(工厂设定:0%)DBD:过程控制器不响应范围(死区)设定范围:0.2...5%(工厂设定:0.5%)SC ALE:定义过程控制器的输入值范围过程控制器的比例系数(K P)与设定值的范围相关下键输入设定值)SP-H)PV-H)直接输入即可BIN-IN:(工厂设定:INCATIVE):二进制输入用于保护定位器不接受非法操作AU TO TU NR:自动调整1067型定位器4操作4.6无电源手动操作定位器中的电磁阀不需电源即可通过旋钮(红色)手动操作可操作这些旋钮图35手动操作使用旋钮的条件:-任何情况下都不能通电-必须有气源双作用执行机构中接到A2口的腔室进气双作用执行机构中接到A2口的腔室排气所有旋钮必须转到0位图36 1067型定位器流程图4.7定位器结构1067型定位器4操作1067型定位器5维护出错信息通电状态的出错信息无法处理AUTOTUNE功能时的出错信息1067型定位器。
Burkert宝帝8630定位器手册.pdf
8630型顶部控制器(连续)操作手册Á¬ÐøÁ¬ÐøÁ¬ÐøÁ¬ÐøÁ¬ÐøÁ¬ÐøÑ¡Ïî自动手动连续1 通用信息1.1 符号本手册中采用了下列符号如未能遵循该信息说明且具有较长的使用寿命连续Data SheetsÇë×ñÊØͨÓü¼Êõ¹æ·¶Î¬»¤±¾²úƷʱÇë×¢ÒâµçÆøÉ豸µÄÓйذ²È«¹æ·¶ÎÒÃǽ«²»³Ðµ£ÈκÎÔðÈÎ1.3 操作注意事项该电子设备对静电较敏感如情况严重为使静电损坏可能性最小同时请注意不要带电安装该电子设备1.4 供货范围收到产品后请立即确认其无破损且与发货清单相符连续267227122731或 2731K气动阀顶部控制器操作手册与多针接头配套的电缆插座可作为附件提供请立即与贵地区的宝得分销商联系请参考宝得销售和发货的通用条款注意连续1.6 主机密码采用一个自由可选的用户密码可以锁定本产品的操作键使用该密码该4位数密码印在本手册最后一页上可以将该密码剪下与本手册分开保存×¢Òⶥ²¿¿ØÖÆÆ÷±¦µÃÆø¶¯µ÷½Ú·§Ó붥²¿¿ØÖÆÆ÷×éºÏºóÕâЩµ÷½Ú·§¿ÉÒÔÓ붥²¿¿ØÖÆÆ÷ͼ2.1±íʾ¶¥²¿¿ØÖÆÆ÷Óë¸÷ÖÖÆø¶¯µ÷½Ú·§µÄ×éºÏÓйØÕâЩ²úÆ·µÄ¼¼Êõ²ÎÊýÔÚÏàÓ¦µÄÑù±¾Öж¼ÓÐ˵Ã÷8630型顶部控制器带2712型平座阀带2700型角座阀带2730型膜片阀带2655型球阀带2672型蝶阀图2.1顶部控制器与各种气动调节阀的组合概览8630型顶部控制器Á¬ÐøĤƬ·§ºÍ´øµ÷½Ú׶µÄÇò·§Æø¶¯»îÈûÖ´Ðлú¹¹»òÐýתʽִÐлú¹¹¶¼¿É×÷ΪִÐлú¹¹µ¥×÷ÓÃÖ´Ðлú¹¹ÖÐËùµÃµÄѹÁ¦×÷ÓÃÔÚµ¯»ÉÉÏË«×÷ÓÃÖ´Ðлú¹¹ÓÐÁ½¸öÆø¸×ÄÚ²¿ÎÞµ¯»É阀门特性:平座调节阀角座调节阀膜片阀球阀型号特性典型介质2712273126523件式防水锤自定位填料箱密 封性好无死区流向可根据需要CIP通过安装外壳可移动 膜片和执行机构死区小3件式球阀结构水酒精燃料盐水碱中性流体和气体高纯流体或无菌流体中性流体和气体低腐蚀性流体3 顶部控制器连续连续连续图3.1´ø213口位移测量系统:塑料电位器与执行机构的活塞杆自由偶合微处理器控制的电气系统:确保有效地设置8位字符LCD确保显示设定值结构特征图3.2 电气连接进气阀2个进气阀脉宽调制这样可达到多种气缸容积和定位速度定位阀配备膜片放位置指示器电容开关高低位置可自由调整 电气连接带接线端子的电缆接头或快速接线盒气动连接黄铜或不锈钢接口顶部控制器如漏气3.2 功能图3.4为顶部控制器与单作用活塞阀配套的功能图2û图3.4 顶部控制器与单作用活塞阀配套的功能图´ø´«¸ÐÆ÷µÄ¶¥²¿¿ØÖÆÆ÷3.2.1顶部控制器图3.6CM DX d1¶ÔÓÚµ¥×÷ÓÃÖ´Ðлú¹¹¶øµ±´æÔÚ¸ºÆ«²îʱE1口输出脉冲打开排气阀使执行机构活塞与设定值之间的偏差减小为零图3.6 位置控制器3.2.2 顶部控制器图3.7ÓÃ×÷Ϊ¹ý³Ì¿ØÖÆÆ÷ʱÖ÷¿ØÖƻطÖеĹý³Ì¿ØÖÆÆ÷¾ßÓÐPID 功能SPPV¸÷ÖÖ±äÁ¿µÄÉèÖù¦ÄÜÈç3.2.1所述图3.7 过程控制器3.3顶部控制器顶部控制器有3种形式多针连接图3.8带部分功能带部分功能图3.8 多针连接时的接口外部设定值用于位置或过程控制4-20mA 0-20mA 0-10V 0-5V 过程控制值 4-20mA 频率 Pt10024V DC顶部控制器电源输入输出操作2进制输出建议模拟位置反馈图3.9 顶部控制器带PG和快速接头时的接口顶部控制器为3线制3.4软件特性紧闭功能行程限位分程范围调整过程值的特性曲线死区实际值和设定值命令的方向安全位置附加功能操作在控制范围以外阀门紧闭超出该百分数说明执行机构完全排空或完全充满信号分为2个或多个位置特性曲线的线性化可编程只有测量到规定的控制偏差后积分时间实际值的上限和下限值如有必要选择附加功能ACTFUNC FUNCSNGL INPUT INP 4'20A CHARACT CHA LIN DIR.CMD DIR.CRISECUTOFF CUT= 1 %; CUT= 99%DIR.ACT DIR.ARISESPLTRNG SR= 0 (%); SR = 100 (%)X.LIMIT LIM = 0%, LIM = 100%X.TIMEno limitationX.CONTROL 1 %P .CO - DBND 1 % *P .CO - SETP SETP INT *P .CO - INPINP 4'20A *P .CO - FILT 0 *P .CO - SCAL UNIT L/S *CODE CODE 0000OUTPUT OUT 4'20A BIN-ININP 4'20A3.5.2顶部控制器3.5.3顶部控制器防护等级 IP 65符合 EN60529 (在电气安装正确的前提下)符合的标准CE 符合CE 89/336机械参数尺寸 参见样本材质 外部 POM²Î¼ûͼ5.2功耗 小于5 W实际信号输入电阻 4 ~ 20 mA 信号时 180设定值信号输入电阻 4 ~ 20 mA 信号时 180防护等级 3 Êä³öµçѹ0-5/10V 时最大电流 10mA 输出电流0/4 mA 时最大负载 560ÏÞÖƵçÁ÷ 100mA 2½øÖÆÊä³öDIN ISO 8573-1 3级露点 -20压力范围 3-7 bar 1稳态时空气流速 100lN /min3Q Nn 值根据压力从7降至6bar 绝压时计算内螺纹12»á½µµÍ×Ôµ÷Õû¹¦ÄܵĿØÖƾ«¶È我们有权进行技术更新以优化顶部控制器的功能M 12M 164 初始调试 注意 本节进行顶部控制器的快速调试有关调试及所有功能的完整说明请参见第5和第6章将气源接到1口4.2 电气连接4.2.1 多针连接将外部设定值信号接到圆形连接器M16上圆形连接器M16接线0/4-20mA 或0-5/10V地0/4-20mA 或0-5/10VÕë½Å 1 23 4说明+24V 不接 GND²»½Ó 外部接线A GND24V DC 10%余波 10%314.2.2 电缆接头连接易连接的端子盒按图4.2接线根据P G端子分配端子端子接线地地0/4-20mA 或0-5/10V地注意 进一步的安装步骤请见第5章顶部控制(连续)即开始工作图4.44.2.3 快速接头连接快速接头3针图4.3 顶部控制器快速接头快速接头4针地地0/4-20mA 或0-5/10V地M o d e主菜单中的设置在自动模式下输入设定值设置完毕后顶部控制器用作为位置控制器在显示项目之间切换原先自动模式下的显示仍保留5安装顶部控制器的尺寸和各种顶部控制器Da ta S h eet s³ß´çºÍÂÝÎÆÐÎʽÇë²Î¼û·§ÃÅÑù±¾5.2旋转顶部控制器其顶部控制器的显示不方便观察或不便于接管和接线按以下步骤旋转松开外壳侧面的平头螺钉不要提升重新连接顶部控制器和气动执行机构之间的接管采用较长的 管子如旋转时提升了顶部控制器如旋转方向错误只能用专用工具才能重新挂上5.3 顶部控制器3-7bar的仪表空气图5.1ͼ5.11口3口 以确保低压差时加在执行机构上的控制压力不会出现负值最大 0%AUTOTUNE5.4 电气连接有多种电气接口可选 多针接口 带电缆接头有一个带螺母的螺钉用于接地为符合EMC要求5.4.1 多针连接图5.2为多针接头功能及其针脚分配M 16M 8M 12M 8电源过程值信号至PLC起始器图5.2 圆形接头及其针脚分配模拟位置指示GND GND电源GNDGND过程值5.4.2 电缆接头连接取下4个螺钉打开端子盒的盖带电缆接头20mA完全电流隔离跳线选择数字输出和过程值输入将过程值接到端子上参见6.3.2 - 2路数字输出 或 过程值输入-5.4.3快速接头连接选择2进制输出或实际过程值输入快速接头3针快速接头PG11技术地4针针脚 说明 外部接线123模拟位置变送器 GND 模拟位置变送器 +设定值 GND É趨ֵ +42143+GND+ G ND 4针 PG11快速接头通过跳线选择2进制输出 或b²Î¼ûÑ¡Ôñʵ¼Ê¹ý³ÌÖµÊäÈëʱµÄÕë½Å·ÖÅäab参见6.3.2快速接头连接电缆有关信息3针PG9快速接头导线截面积导线结构/最小直径导线绝缘材料导体外径导线直径(包括绝缘层)额定电压过压分组/污染度4针PG11快速接头导线截面积导线结构/最小直径导线绝缘材料导体外径导线直径(包括绝缘层)额定电压过压分组/污染度0.34 - 0.75mm2VDE 0295 2-5级/0.2PVC/PE4 - 6 mm /30.34 - 0.75mm2VDE 0295 2-5级/0.2PVC/PE4 - 6 mm /25.5调整感应式开关必须打开顶部控制器的盖才能安装感应式开关打开顶部控制器安装感应式开关图5.5右转 左转图5.5 用安装螺钉固定感应式开关6操作6.1顶部控制器图6.1MANUAL/AUTOMATÁ¬Ðøͼ6.2Õâʱ¿ÉÔÚÊÖ¶¯ºÍ×Ô¶¯Ä£Ê½Ö®¼äÇл»ÔÚÊÖ¶¯Ä£Ê½ÖпÉÒÔÈ˹¤´ò¿ª»ò¹Ø±Õ·§ÃÅÉèÖò˵¥¹ý³Ì²Ù×÷²Ëµ¥6.3 调试为位置控制器调试前请根据气动和电动连接说明进行连接6.3.1基本设置初始调试选择以下基本设置: 将顶部控制器校正至所选的操作条件(自校正)单作用或双作用0-20 mA主菜单图6.3 主菜单中的设置 - 单作用 - 双作用总述顶部控制器工作在自动模式中的过程操作菜单按MANUAL/ AUTOMATIC键5秒即可进入设置菜单快速按一下MANUAL/AUTOMATIC键即可进入ACTFUNC子菜单按上下键可在不同的功能之间移动选定所需设置后按MANUAL/AUTOMATIC键确认显示时这几位闪烁执行机构功能INPUT所选的输入信号该子菜单中选择用于设定值的信号 - 4-20 mA电流 - 0-20 mA电流 - 0-10 V电压 - 0-5 V电压 ADDFUNCT设置附加功能初始操作时省略该功能顶部控制器自校正自动校正顶部控制器的参数物理脉宽调制主要功能要启动自校正功能然后按MANUAL/AUTOMATIC键5秒即可启动自校正但是这样顶部控器才能自动确定当前操作条件下的最佳设置避免在气源由后续操作提供的情况下进行自校正而引起的对控制器的不当的修正如大的压力波动退出主菜单并显示软件版本为退出主菜单这时在屏幕右边显示软件版本在贮存所设置的参数时显示EEPROMMANUAL/AUTOMATIC参见第7章)显示 说明......·¢»õʱֻÓлù±¾¹¦ÄÜÊǼ¤»îµÄ²Î¼ûµÚ4章对于要求更高的位置和过程控制6.4.1 设置菜单所用的按键按MANUAL/AUTOMATIC键并保持5秒以激活设置模式设置菜单包括主菜单和附加菜单第4章如有必要然后再进行设置在主菜单中选择附加功能在主菜单中选择ADDFUNCT 子菜单进入附加功能子菜单按MANUAL/AUTOMATIC键确认主菜单中的附加功能*所有所选的功能都在主菜单中被激活从主菜单中退出附加功能在主菜单中选择ADDFUNCT 子菜单进入附加功能子菜单*星号标记取消该附加功能在主菜单中被取消增加数值减少数值只能更改正在闪烁的那位图6.6 将附加功能选到主菜单中的原理图УÕýÌØÐÔÇúÏß½Ó¿Ú2×îСºÍ×î´óÖµCHARACT选择输入信号和行程之间的转换特性曲线用户定义特性曲线工厂设置将流量校正为工作特性曲线11125335¿É×ÔÓɱà³ÌÌØÐÔÇúÏßÁ÷Á¿ÌØÐÔKv =f表示阀门的流动特性通常有两种流量特性曲线线性特性曲线中dKv = nlindsdKv/Kv = n equalpercds标准阀行程 [%]标准位置设定值 [%]图6.7 校正特性曲线工作曲线Q =f 表示流过阀门的流量Q 和行程S 之间的关系泵和使用特性的影响校正闭环控制系统通常要求确定工作特性曲线顶部控制器中有一个具有各种特性曲线的变送元件可以设置11125331的等百分比曲线和线性特性曲线ÿ¸öµãÉ϶¼¿ÉÑ¡ÔñÐгÌ要输入特性曲线点按MANUAL/AUTOMATIC键后显示第一个设定点0接着显示行程值0可以用上下键设置0-100% 的行程值按MANUAL/AUTOMATIC键确认最后一点程序返回CHARACT菜单项用上下键输入重启动点½ô±Õ¹¦ÄÜÈ·±£·§ÃÅÔÚ¿ØÖÆ·¶Î§Ö®Íâ¹Ø½ô%ÔÙ´ò¿ª·§»ò»Ö¸´¿ØÖƲÙ×÷ÐèÒªÒ»¸ö1%的滞后90 - 100%排气完全排空范围图6.1¼´F A LLR I S E图6.10 输入信号和设定值的动作方向DIRACT执行机构的方向或关系工厂设置:该功能确定执行机构气源状态和实际指示值之间的关系排气对应于0%充气对应于100%ÅÅÆø¶ÔÓ¦ÓÚ100%充气对应于0%ÅÅÆø³äÆøÆøԴ״̬ͼ6.11 执行机构气源状态 和实际值之间的关系D IR.C RI S E²úÉú·§ÃÅÕû¸ö»îÈûÐг̷¶Î§Î»ÒƵÄÊäÈëÐźÅ×îСºÍ×î´óÖµ¸Ã¸½¼Ó¹¦ÄÜ¿Éʹ¶¥²¿¿ØÖÆÆ÷µÄÉ趨ֵ·¶Î§ÓÉÒ»¸ö×îСºÍ×î´óÖµËùÏÞÖÆ4 – 20mA 0 - 10V 或0 -5V ÊäÈëÐźŷ¶Î§¿ÉÖصþÒ²¿É²»Öصþ²Î¼ûͼ6.12²âÁ¿·¶Î§µÄ0 -75%²âÁ¿·¶Î§µÄ25 -100 %(%)ÎïÀí²Î¼ûͼ6.13ÔòPOS ÏÔʾ¿ÉÄÜ´óÓÚ100%或小于0%Ðг̷¶Î§µÄ0 -50%Ðг̷¶Î§µÄ50 -100%限制的活塞 物理活塞行程[%] 行程[%]未经限制的活塞行程设定值[mA]限制的活塞行程图6.13 行程限位XTIME设置速度限值工厂设置整个行程的最小打开和关闭时间以T.OPN 和T.CLS 自动输入所选的为最高工作速度可以输入T.OPN 和T.CLS值关闭速度秒T.O P Nt阀门行程[%]设定值实际值图6.14 设定值突升时的打开速度限制效果XCONTRL顶部控制器的参数设置顶部控制器的死区以%输入死区工厂设置1%该功能确保顶部控制器仅当测量到一个所选定的控制差值时才动作该功能通过控制启动频率保护电磁阀和气动执行机构位置控制器参数顶部控制器的比例因子 顶部控制器的比例因子结束顶部控制器的参数设置位置设定值控制偏差至控制器实际位置死区图6.15 位置控制的死区PCONTRL过程控制器的参数设置控制器的死区PID控制器的参数设定值输入方式模拟输入信号类型控制器范围贮存新的参数结束控制器的参数设置P.CO-DBND过程控制器的死区工厂设置相对于所选的过程设定值输入范围图6.15ÒÔ% 输入控制器的死区以对应于所选过程设定值输入范围的% 输入死区测量值输入类型范围范围例如16 mA1000Hz240至控制器实际位置图6.16 过程控制的死区P.CO-PARA控制器PID参数比例校正值 0 - 99.99积分时间 0.5 - 999.99微分时间0.5 - 999.99过程控制器的工作点0.0-100%附录B中有所输入的参考值的记录表X d2X d2Xd2’Xd2’。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3 ... 7 bar
7 l N / min (进气和排气) (QNn 值依据压力从 7 bar绝压 下降到 6 bar绝压的定义) 可选:130 lN / min (进气和排气) (仅限单作用阀)
插管接头 Ø6 mm / 1/4" 可按需提供: G1/8
14
工作条件
警告!
180 Ω at 0/4 - 20 mA / 分辨率 12 bit 19 kΩ at 0 - 5/10 V / 分辨率 12 bit 3 ,符合 VDE 0580
10 mA
输出电流0/4 ... 20 mA
时的最大负载
560 Ω
感应接近开关的 电流限值
100 mA
二进制输出 电流限值 二进制输入
电气隔离
l/s
MENU PV POS INPUT*
POS %
XXX
MENU SP CMD MANU
CMD %
XXX
MENU POS TEMP MANU
XXX TEMP
*C
MENU CMD PV
XXX INPUT
mA
MENU TEMP POS
设定位置的输入信号 (0 – 5/10 V / 0/4 – 20 mA)
该定位器有两种电气连接选项: • 多针连接 • 电缆接头
信号参数 电源电压 设定值 (过程设定值 / 位置设定值)
实际过程值 (仅限过程控制器)
24 V DC
0 ... 20 mA; 4 ... 20 mA 0 ... 5 V; 0 ... 10 V
2
所用符号
本手册中使用的符号有: 危险!
警告即时危险! • 如不遵守该警告可能会导致致命的或严重的伤害。
警告! 警告潜在危险! • 如不遵守该警告可能会导致严重的或致命的伤害。
告诫! 警告可能的危险! • 如不遵守该警告可能会导致中等或轻度的伤害。
注意 ! 警告对设备的损害!
有关安全无故障地操作该设备的重要提示和建议。
18
显示器与按键
按键配置 左选择键
POS %
XXX
MENU INPUT CMD MANU
显示器 右选择键
向上键 向下键
显示值的 描述
显示值的 单位或 百分比
AUTOMATIC (自动)模式时的显示: 该色块从左向右滚动
POS %
XXX
MENU INPUT CMD MANU
显示值 显示值的棒图显示
按键配置
过程设定值
POS %
XXX
MENU INPUT CMD MANU
CMD %
XXX
MENU POS TEMP MANU
TEMP *C
XX.X
MENU CMD INPUT
显示阀门执行机构的 实际位置 (0 – 100%)
显示阀门执行机构的 设定位置 (0 – 100%)
定位器内部的温度 (°C)
XXX SP
空! 触电危险! 伸手到设备内部具有触电危险。 • 伸手到设备内部之前,请先切断电源并确认,以防止
重新启动! • 遵守电气设备适用的事故预防和安全规则!
警告! 由于意外启动而导致的受伤危险。 • 采取适当措施防止该设备意外启动!
6
5
警告! 安装和维护过程中可能导致危险。
• 只能由获得授权的技术人员采用合适的工具进行安装 与维护!
参见其产品资料(data sheet) 外部:PPS, PC, VA, 内部:PA 6; ABS NBR / EPDM
13
电气参数
连接方式
电源
输入功率 实际值信号的 输入阻抗
电缆接头 (24 V DC) 或多针插头 (Profibus DP, DeviceNet, 24 V DC) 24 V DC ± 10 % 最大余波 10 % <5W
→ 指定一个必须执行的程序。
正确使用
警告!
如不正确使用 8692 / 8693 型定位器,则可能对人体、附 近的设备以及环境造成危害。
• 该设备不可用于室外。 • 该设备不可暴露在直射阳光下。 • 该设备只能与经 Bürkert 认可和推荐的第三方设备及
组件配套使用。 • 由于其可能的应用范围较广,请确认该定位器是否适
180 Ω ,4 - 20 mA 输入 /分辨率 12 bit 17 kΩ ,频率输入 0 ... 1000 Hz / 测量值的 1‰ > 300 mVss 正弦、方波、三角波 PT 100 - 20 ... + 220 °C , 分辨率 < 0.1 °C
15
设定值信号的 输入阻抗
防护等级 模拟位置反馈: 输出电压 0 ... 5/10 V 时的最大电流
→ 要从菜单 2 (参数设置和配置)返回菜单 1(操作过程), 按左选择键 (EXIT)。
MENU 约3秒
菜单 1: 操作过程
EXIT
菜单 2: 参数设置和配置
AUTOMATIC 模式
8692 型
AUTOMATIC 模式 时的显示
实际过程值
8693 型
XXX PV
l/s
MENU TEMP SP MANU
100 mA, 输出锁定
电气隔离 0 ... 5 V = log "0", 10 ... 30 V = log "1" 反向输入时顺序相反
16
按键配置:
向上/向下键: • 切换显示值(POS、CMD,...)
(AUTOMATIC 模式) • 手动打开和关闭阀门 (MANUAL 模式) • 滚动菜单 • 设置数值 (+, -, ←)
通用信息 供货范围
收到产品后请即确认其完好无损,且其型号与数量等与装箱 单相符。 如有任何差错,请立即与我们联系。
联系地址
请访问:
8
9
结构与功能
位置控制器
Байду номын сангаас执行机构
阀
8692 型和 8693 型定位器为电气位置控制器,适用于带单 作用或双作用执行机构的气动调节阀。 该定位器与气动执行机构一起构成功能单元。 该调节阀系统可用于各种控制任务,根据实际应用条件,有 多种 Bürkert 调节阀可与该定位器配套:角座阀、截止型调 节阀、膜片阀或球阀等。
19
操作菜单
• 菜单 1: 操作过程 AUTOMATIC / MANUAL 模式
• 菜单 2: 参数设置和配置 输入操作参数。 用可选的菜单项来补充菜单。
→ 要从菜单 1(操作过程)切换到菜单 2 (参数设置), 按左选择键 (MENU) 约 3 秒。 在这 3 秒(倒数)时间内,有两个色块滚动过去。
• 必须阅读并理解该快速入门。
8692/8693 定位器的快速入门主要涉及如何安装和启动该 设备等。 有关该设备更详细的说明请参见 8692/8693 型定位器的 操作手册。这些操作手册中也包括了保修条款以及正确 处置该设备的相关细节。
您可在随货发送的 CD 中找到 8692/8693 型定位器 的操作手册,也可从以下网址找到: → Documentation → manuals /datasheets → Type 8692 / Type 8693
功能
8692 型位置控制器 根据位置设定值对执行机构的位置(行程)进行调整。位置 设定值可通过外部信号进行设置。
8693 型过程控制器 该定位器集成在控制回路中,通过对过程设定值和实际过程 值进行 PID 控制运算,计算出阀门的行程。过程设定值可通 过外部信号进行设置。
10
11
技术参数
定位器的结构
危险!
触电危险! 伸手到设备内部时有导致严重受伤的危险。 • 进行接线之前,必须切断电源并采取保障措施,防止
设备意外重启!
警告!
由于安装不当而导致的危险! 安装不当将导致人体受伤以及对设备和周围环境的损坏。 • 只能由获得授权的技术人员采用合适的工具进行接管
和电气接线! 由于设备意外启动而导致的危险! 安装过程中设备意外启动会导致人体受伤和设备损坏。 • 采取适当措施防止设备意外启动。
20
21
安装 安全说明
警告! 安装阀门时的受伤危险! • 只能由获得授权的技术人员采用合适的工具进行安装! • 电源或气源中断后,确保按规定或受控制地进行重启! 由于意外启动该设备而导致的危险! • 采取适当措施防止设备意外重启!
安装过程阀
危险! 高压危险! 由于接触系统而导致的严重受伤危险。 • 拆卸管道与阀门之前,请先关闭压力入口并将管道排
• 电源或气源中断后,确保按规定或受控制地进行重启!
告诫! 通用技术规范适用于该设备的应用设计与操作! 如不遵守这些规范可能会导致人体受伤和/或设备损坏以 及对周围环境的损坏。 • 请遵守通用技术规范!
8692 型 和 8693 型定位器研发时考虑到了公认的安 全规则,具备先进的技术。不过,还是可能会出现 危险情况。 仅在该设备处于完美条件下才操作该设备,并遵守其操 作说明。如果未能遵守该快速入门和操作手册,或者对 该设备进行了未经授权的更改,我们将不承担任何责任, 关于本设备及其附件的相应保证条款也将无效!
7
注意!
静电敏感组件 / 模块! 该设备包含对静电(ESD)敏感的电子组件。与带静电的人 体或物体接触会损坏这些组件。在最坏的情况下,这些 组件会立即损坏,或者在启动之后出现故障。
请遵守 EN 100015 -1 的要求,以减小或避免可能由突然 的静电而导致的损坏。
同时确保电子组件不与附近的电源接触。
或站在其上。)
• 不要对该设备的外壳作任何外部修改。不要将其外壳或 螺钉等进行喷涂。
根据 8692 型和 8693 型定位器的使用说明、使用条件、 允许的参数(参见本快速入门中和相关气动阀资料中的 技术参数一章),确保该设备无故障运行并具有较长的 使用寿命。