ABBAC450学习总结共62页
ABB机器人保养总结学习课程

二、机器人本体标准保养
1、本体清洁
2、本体和6轴工具端固定检查
对机器人外表面各个部分进行全面清洁
3、各轴限位挡块检查
检查是否有松动,螺丝划线是否对其
1轴限位挡块
3轴限位挡块
2轴限位挡块
5轴限位挡块
1、2、3、5轴有限位挡块,查看挡块有无磨损及松动,4、6轴无限位挡块,仅通过编码第器识2页别转/共径1的3方页式进行限位及报警
加油:
①将排油口密封堵头堵上; ②打开油液观察窗和加油口; ③在加油口进行加油,直至油液观察窗有油溢出为止; ④将油液观察窗和加油口的密封螺母重新上紧。
第5页/共13页
第五页,编辑于星期五:九点 三十分。
2、轴2、轴3
注:轴2、轴3排油和加油方法相同,机器人可在任意姿态进行
排油: ①打开加油口密封螺母,准备好废油桶接油; ②打开排油口密封螺母进行排油,排油约需5分钟。
加油: ①上紧排油口密封螺母; ②打开加油口; ③在加油口进行加油,直至3页
第七页,编辑于星期五:九点 三十分。
4、轴5
注:轴5排油和加油时机器人姿态如上图所示
排油: ①打开加油口密封螺母,准备好废油桶接油;
②打开排油口密封螺母进行排油,排油约需5分钟。
256MB的存储卡上存储不超过10个备份,1G存储卡不超过40个。
2、机器人示教器功能检查
如作图所示为示教器的示意图,保养时对其中各个按钮进行功 能试验,确保使能、动作、急停都起作用,对触摸屏进行,确保触 屏准确良好。
3、控制柜检查
a.通电检查
①电源电压测量
测量机器人进线电压、驱动电压、电源模块电压,测量位
第九页,编辑于星期五:九点 三十分。
四、机器人控制柜保养
AC450组态与操作

ABB DCS AC450組態與操作1. AC450架構:為ABB Advant DCS 400型架構之主架構(另一為AC410)與AC800為現今ABB 發展OCS 中之兩大主流.AC450為大型邏輯調節控制器,可擴展到最多5700個模擬和數字I/O 點.Redundancy 處理模塊,具有8或16 Mbyte 動態RAM Motorola68040,最多可接8個Advant Fieldbus100(S800 I/O) 架構圖:MasterBus300控制網絡:控制網絡用於連接Advant OCS 自動化系統中的各種站.它有效地將通信功能從其餘系統中隔離,因此可以以最小的影響完全自由地對應用程序進行擴展或對網絡更改結構. 最多有45個站可以連接一個MasterBus300.2. 控制軟件與硬件設定:Advant OCS 接口過程與控制程序上功能處理上分為DB 與PC 元素 DB 數據庫:主要的I/O 信號接口如AI.AO.DI.DO 等模擬或數字量等應件輸出入與程序環境交換過程之數據庫.定義設置元素名稱. PC 元素:為內部調節程序控制,即程式控制區,為AMPL(ABB 發展之過程控制程式)的基本單位元素.內容包含多種功能區塊組合成(FUNCTION BLOCK)說明:其中DB 元素DI1.1/SW1. AI1.1/LEVEL1 P=DO1.23…. AO1.5… 均為實際I/O 接點輸出入之定義PC 元素:如MOVE(B,2) B:代表數字型態 2:代表接腳DB DBPC3.過程站組態工具:進入程式編輯AdvaBuild Application Builder(APB):該程序是一個處理工程.節點.回路.和典型回路的基本軟件模塊,它是FCB與ONB先決條件APB為幾個工程保存數據.工程可被存儲在本地硬盤或中心服務器上的不同工程根目錄中,考慮了不同工程師一起工作於一工程上之需求考量.AdvaBuild Function Chart Builder(FCB):為離線應用編程環境,它提供了基於Windows一個面向功能的,支持典型回路.回路和節點結搆的工程編程的有效方法.AdvaBuild On-line Builder(ONB):在現編輯.可透過鍵盤上輸入命令或使用命令文件設計和測試應用程序.AdvaBuild Application Builder(APB):產生一個Project: 最大長度為8個字符(a-z;A-Z,0-9and‘_’)產生一個Node: 最大長度為8個字符(a-z;A-Z,0-9and‘_’)說明Page Layout Template Set:選擇工程中想使用的一套模板Node Type:為控制器.操作站類型選擇Net,Node:對於一節點類型,輸入一有效並唯一網絡及節點號PC 程序結構:PCPGM:整個程序模塊的頭,有輸入端子可以控制程序是否執行共有1-99個PC 程序CONTRM:從屬PC 模塊的模塊頭共有1-999個PC 模塊層AND:PC 元素1-255個On-line Builder(ONB)產生PC 圖編輯程序啟始點→選擇PC 元素在線編程上用#GEPCD PC1.3.3即可產生下PC 元素圖其它功能命令GEPCD D,PC1.3.3:產生PC 圖並動態值顯示IV:插入數值 GVD:動態值顯示DV:刪除數值 MV:修改數值GS:輸入端選擇顯示 END:回到啟始點PC1.3.3最多九層4.過程控制器和PC程序的操作P1:OPERATION工作模式P2:CONFIGURATION工作模式-3(P3):STOPPED工作模式-4(P4):OFFLINE工作模式Redundant控制器顯示訊息b1:standby b2:upgrading -3,-4與工作CPU同←啟動模示選擇器←ENTER按鈕1.AUTO:熱啟動,當控制器於CONFIGURATION或OPERATION模式下繼續維持不變2.STOP:進入STOPPED工作模式3.CLEAR:冷啟動:清除RAM,進入CONFIGURATION模式4.OFFLINE:進入OFFLINE模式一般正常位置是AUTO5.如何用ON-LINE Builder設計一個應用程序。
ABB机器人初级培训-(版)

ABB初级培训一、引言随着工业4.0的推进,技术在全球范围内得到了广泛应用,ABB 作为全球领先的工业制造商,其产品在各个领域发挥着重要作用。
为了满足市场需求,培养具备ABB操作与维护能力的专业人才,本初级培训课程应运而生。
本文档将详细介绍ABB初级培训的课程内容、教学方法、培训目标和预期成果。
二、课程内容1.ABB基础知识:介绍ABB的发展历程、产品系列、技术特点和应用领域,使学员对ABB有全面的认识。
2.ABB编程操作:学习ABB的编程方法,掌握RAPID编程语言,熟练操作ABB的示教器,实现的基本运动控制。
3.ABB维护与故障排除:学习ABB的日常维护方法,了解常见故障及排除方法,提高的稳定运行能力。
4.ABB应用案例:分析ABB在不同行业中的应用案例,了解在实际生产中的应用需求和解决方案。
5.实践操作:安排学员在ABB实训基地进行实际操作,提高学员的操作技能和解决实际问题的能力。
三、教学方法1.理论教学:采用多媒体教学方式,结合实际案例,使学员更好地理解ABB的相关理论知识。
2.实践教学:组织学员在ABB实训基地进行实际操作,提高学员的操作技能和解决实际问题的能力。
3.互动教学:鼓励学员提问,讲师现场解答,促进学员对知识的深入理解和掌握。
4.在线学习:提供在线学习资源,方便学员随时查阅资料,巩固所学知识。
四、培训目标1.掌握ABB的基础知识,了解其产品系列、技术特点和应用领域。
2.熟练掌握ABB的编程方法,具备独立编写程序的能力。
3.学会ABB的日常维护和故障排除,提高的稳定运行能力。
4.了解ABB在不同行业中的应用案例,具备一定的项目分析和解决能力。
5.培养具备ABB操作与维护能力的专业人才,满足市场需求。
五、预期成果1.学员完成培训后,具备ABB初级操作与维护能力,可在相关企业从事操作、编程和维护等工作。
2.学员通过培训,提高自身技能水平,为企业的技术升级和产业转型提供人才支持。
3.培训成果的推广与应用,有助于提高我国工业技术应用水平,推动产业升级。
(完整word版)ABB变频器基础知识全解

带你进入工控之门——学一种变频器序言:初次接触工控的人对其都会感到很神秘,许许多多的自动控制,错综复杂的联锁及很多高新的电气元器件,让人无从下手。
其实我们只需掌握一些基本的知识,分解各个部件,了解各部件的性能及要点,然后再整合起来,就清晰多了。
整个工控的组成好似人体一样,一般有:大脑(DCS),神经中枢(网络),躯干(PLC),手脚(现场执行器),五观(现场传感器)。
今天我为大家谈谈现场执行器中的一个工控中常用的电气部件——变频器。
变频器由于其本身具有可调速及节能的重要特性,在近几年发展很快,广泛应用于各邻域。
对于品种繁多的变频器和其本身内部各参数之多,我们往往第一次接触会感到无从下手,但我们可以从各种变频器的共性中学习,掌握一种变频器,举一反三就能从而了解各种变频器的应用。
下面我就用一种常用的变频器ABB-ACS550给大家讲解其在实际工作中的应用。
一、安装:打开包装我们首先要查看的是选用的变频器功率是否与配套的电机功率一致,要求是变频器功率≥电机功率,否则变频器因功率不足带不起负荷而烧坏。
变频器上一般会有如下标签:表示该变频器输入要求电压为3相380电压,频率50HZ,其上边的数字是一个适用范围,我们一般不用理会,因为国内的电压等级均满足其要求。
输出电压为0至380V,3相交流,电流为6.9A,也就是能带3KW左右的电机,频率可调0-500Hz,一般我们应用中最大也只有60Hz。
一般变频器要求安装在无尘,无水气,无腐蚀的环境中,并在变频器本身上下左右周围留有一定的空间,有利散热。
条件好的话最好能安装在特定的配电房内,并配有恒温设备,因为变频器本身也有发热,其电子元件会受温度的影响,如果其散热片上积尘多散热不好的话,会加剧变频器的损坏。
由于变频器本身是个干拢源,所以它产生的电磁干拢对其周围会有一定的影响,由其是对周围有DCS,PLC这种高精度工控设备更要注意安装中的每一环节。
其解决方法有:1、在电源输入侧加装电抗器,现在有些变频器在设计时已经在输入端加入了抗干拢的电抗器,可以在订购时加以注意。
abb机器人实训心得体会大全(21篇)

abb机器人实训心得体会大全(21篇)心得体会可以帮助我们更深入地理解和掌握所学知识,同时也能够提高我们的表达和思考能力。
这个经历让我明白了坚持不懈和毅力的重要性,只有持之以恒才能取得好的成果。
机器人会计实训心得体会机器人会计实训是当前会计教育中的一种新方法,其结合了会计知识和人工智能技术,旨在培养学生的实际操作能力。
在我参加机器人会计实训的这段时间里,我深深感受到了其独特的优势和价值,下面我将分享一下我在实训中的心得体会。
第二段:技能提升。
机器人会计实训一方面锻炼了我们的实际操作技能,另一方面也加深了我们对会计原理和方法的理解。
通过模拟真实的会计工作场景,我们学会了准确输入和处理大量数据,并通过机器人会计软件生成财务报表。
这种实践性的学习让我逐渐熟悉了会计流程,提高了我的数据处理和分析能力。
第三段:团队合作。
机器人会计实训通常会组织学生进行小组合作,这锻炼了我们的团队合作能力。
在实训过程中,我们需要相互配合、交流沟通,才能高效地完成任务。
这让我意识到在会计工作中,团队合作是至关重要的,只有通过共同努力,才能取得更好的成果。
同时,团队合作也增强了我的沟通能力和领导能力,让我在与他人合作中不断成长。
第四段:创新思维。
机器人会计实训鼓励学生创新思维,培养我们解决问题的能力。
在实际操作中,我们常常需要面对各种不同情况,需要灵活运用所学的知识,并提出解决方案。
通过这种方式,我们培养了自己的创造力和分析思维,能够更好地应对未来会计工作中的挑战。
第五段:对未来的影响。
机器人会计实训不仅提高了我们的实际操作技能,还给我们展示了未来会计工作的发展方向。
随着科技的不断进步,机器人会计将会在会计领域发挥更大的作用,取代一些繁杂的工作,使会计人员能够更专注于分析和决策。
通过参加机器人会计实训,我们有机会了解和掌握这项新兴技术,为将来的职业发展打下坚实的基础。
总结:通过机器人会计实训,我不仅提高了自己的实际操作技能,还获得了更多的团队合作和创新思维的经验。
最新ABB AC450学习总结
☆注:正常位置是AUTO。
2.3 CI546(Ethernet通讯板)
2.4 CS513(MB300通讯板)
用于MPI网络 时
例子:用于MB300通讯
2.5 PU516
驱动安装注意:
2.6 其他板卡
3.Master Bus 300通讯
Master Bus300通讯:
(零)。
冗余处理模块的信息:
后备单元和主单元都有下列工作方式:STANDBY,UPGRADING,STOPPE和 OFFLINE。
在后备处理器模块前的LED用代码指示其工作模式:b1、b2、-3或-4。其中 b1为STANDBY工作模式,b2为UPGRADING工作模式。 1.AUTO(热启动):
4.3.1 On-Line Builder在线设计程序步骤 1.启动Application Builder 2.产生或打开一个Project和Node
3.启动On-Line Builder 1 2
3
4.定义DB部分的大小(命令:#DIMDB)
5.定义PC部分的大小(命令:#DIMPC)
6.产生DB元素(命令:#CRDB 调用名)
在这种模式下可以完成控制任务并控制过程输出。 P2 CONFIGURATION工作模式: 处理模块不执行应用程序可以组态控制器系统和应用程序。 -3(P3) STOPPED工作模式: 处理器模块一点儿不执行程序,主CPU完成自检以检测控制器
的一些基本功能,过程输出是定义的状态(零)。 -4(P4) OFFLINE工作模式: 过程控制器只执行低层的故障跟踪命令。过程输出是定义的状态
如果控制器在CONFIGURATION或OPERATION工作模式,它仍然保留 CONFIGURATION或OPERATION工作模式。模式选择开关打到位置1 (AUTO),按下按钮(ENTER)。 2.STOP:
2024版(完整版)ABB机器人培训

(完整版)ABB机器人培训•机器人基础知识•ABB机器人硬件组成•ABB机器人软件编程目录•ABB机器人应用案例•ABB机器人维护与保养•ABB机器人未来发展趋势机器人定义与分类机器人的定义机器人是一种能够自动执行任务的机器系统。
它可以接受人类指挥,也可以运行预先编排的程序,还可以根据人工智能技术制定的原则纲领行动。
机器人的分类根据应用领域和技术特点,机器人可分为工业机器人、服务机器人、特种机器人等。
其中,工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。
工业机器人发展历程第一代机器人示教再现型机器人,主要由机器手控制器和示教盒组成,可按预先引导动作记录下信息重复再现执行。
第二代机器人感觉型机器人,如装有视觉、听觉、触觉传感器的工业机器人,能准确识别工作环境,进而根据环境的变化做出相应动作。
第三代机器人智能型机器人,是理想中所追求的最高阶段,智能型机器人不仅是感觉型机器人,还具备对于周围环境做出反应,用中央计算机控制其本身的运动和行动,如控制和调节机器人的行动、计划、协调、理解和推理等。
01 02 03公司背景ABB集团是全球电气产品、机器人和自动化系统的领先供应商。
自1988年第一台ABB机器人诞生,ABB在工业机器人领域的技术积累已超过30年。
技术实力ABB拥有当今最多种类的机器人产品、技术和服务,是全球装机量最大的工业机器人供货商。
ABB强调的是机器人本身的整体性,以其六轴机器人来说,单轴速度并不是最快的,但六轴一起联合运作以后的精准度是很高的。
应用领域ABB机器人广泛应用在焊接、装配、铸造、密封涂胶、材料处理、包装、喷涂、精加工等领域。
同时,ABB还提供一系列的应用软件和外围设备,包括各类传感器和先进的柔性生产设备等。
ABB机器人简介控制器类型及功能IRC5控制器ABB机器人最新的控制器,具有高性能、紧凑和灵活的特点。
Abb整流柜的学习心得
1.全部切入总调模式:总调给定为零;配合着控制电流降档位(降电压);稳流系统可以退出,但没有必要退出,等电解恢复时直接给定到需要电流,配合升档位即可。
保持控制电流不大于10A, 不小于1-2A,稳流控制最平稳。
2.如果稳流系统退出了,首先启动稳流系统,总调给定到需要数值;配合着控制电流升档位即可。
同样,保持控制电流不大于10A, 不小于1-2A。
3.控制权分三种,整流器就地控制,整流器主控柜控制,后台电脑控制,总调是参与总调的机组,电流给定由总调给定设置,分调是参与分调的机组,电流给定由分调给定设置。
有载开关分两大类控制方式:1)本控:在有载开关控制箱上操作。
2)远控:第一,就地控制;第二,主控柜控制,第三,后台电脑控制这三种控制方式都是远控方式,当控制权在哪里哪里才可以操作,比如当前控制权在就地控制柜,那么后台电脑是操作不了有载开关的,如果要操作,必须先把控制权从就地控制柜拿到后台电脑控制。
全部逻辑在整流器的PLC里实现。
为了操作简洁合理,有载开关没有总调和分调模式,多此一举,操作繁琐,模糊概念。
当机组停机时,总升和总降对该机组不起作用,在极其个别的情况下,对某个机组不想总升或总降,将该机组控制权释放到就地控制即可,想对这个机组再操作时拿到控制权即可。
这样在任意时刻,想总升降也可,想分升降也可,不需要多余,反锁的切总调,切分调操作。
4.单台机组停机,以二号机组为例,如下操作最合理:通常情况:非二号机组在总调模式,二号机组在分调模式。
一般情况是8个机组都在总调模式,如果停二号检修,将二号机组由总调切入分调模式,二号电流给定为零,参考二号机组的控制电流降低档位,当控制电流小于1-2A时降档,再当控制电流小于1-2A时再降档,反复操作,一直将到该机组的实际直流电流为零。
上述是大部分情况,个别情况下,如果其余非2号机组的档位不足以负担2号机组转分来的电流时,第一:将二号控制权释放到就地控制,第二:总升,第三:2号机组拿到控制权,继续降档一直到二号机组的时间直流电流为零。
ABB变频器提升学习

图7 控制柜中的实际位置图
图8 加热回路控制回路电路图
电路说明: 加热器启动的条件: 1、控制柜内湿度>95%(湿度传感器上的设定值见图6左部分),其1和3触点闭合(当<95%既 设定值时,1和3触点断开)。 2、控制柜中的实际温度<温度传感器E2的设定值时。 3、网侧变流器ISU模块及转子侧变流器INU模块内部温度<10°C时。 根据图6中的控制电路图得知: 1、当控制柜内湿度>湿度传感器的设定值时,E1 1和3闭合,并且当控制柜中温度<70°C既 E3的设定值时,E3 3和5触点吸合,K7加热器控制继电器吸合,加热器开始工作。 2、当控制柜中的实际温度<温度传感器E2的设定值时。E2 3和5触点吸合,并且当控制柜 中温度<70°C既E3的设定值时,E3 3和5触点吸合,K7加热器控制继电器吸合,加热器开始
接器(后部插槽)——>铜排出线至发电机转子侧进线
——>Crowbar 模块3相电
见下图:
5、ABB变频器加热回路总结
5.1温度和湿度传感器作用:
监测变流器控制柜中温度和湿度,根据监测到的温度及湿度信息 完成对控制柜的加热,保证控制柜中各元器件的温度及正常工作环 境。
图6 湿度传感器E1、温度传感器E2和E3 实物图
点13、14导通,RDCU X22的DI3输入高电平(见下图3),此时RDCU得 到主接触器吸合指令,延时0.2S后,RDCU X25中的DO1输出口发出断开信号
。 (见下图3),则K2继电器断开充电回路,至此完程
图3网侧变流器控制板RDCU DI和DO输出状态电路图
图4 控制回路原理图
图5充电回接线图
2、NUIM电压电流测量单元总结
2.1、NUIM测量电压及电流说明 转子侧变流器INU控制单元NDCU测量网侧三相电压与发电机侧三相电压,转子侧U、W相电流。 具体测量点: 1、网侧三相电压由NUIM的X5网侧电压测量端子; 2、发电机侧(定子侧)3相电压由NUIM的X6的定子侧电压测量端子;(说明X5和X6端子在监测 电网电压与发电机定子发出的电压同步时提供测量数据); 3、转子侧U、W侧电流由MCB大开关下侧出线,U、W两相电流互感器测量进NUIM的X1-1.2和 X2-1.2端子。 2.2、测量数据传送 NUIM测量的电压及电流信号,经NUIM电路板计算后,测量的数据转换为光信号,由NUIM V41 和V42经光纤传递给NDCU的PPCS U/I端子,使NDCU得到实际的电压电流信号。
二面角大小的几种求法(归类总结分析)
二面角大小的几种求法二面角大小的求法中知识的综合性较强,方法的灵活性较大,一般而言,二面角的大小往往转化为其平面角的大小,从而又化归为三角形的内角大小,在其求解过程中,主要是利用平面几何、立体几何、三角函数等重要知识。
求二面角大小的关键是,根据不同问题给出的几何背景,恰在此时当选择方法,作出二面角的平面角,有时亦可直接运用射影面积公式求出二面角的大小。
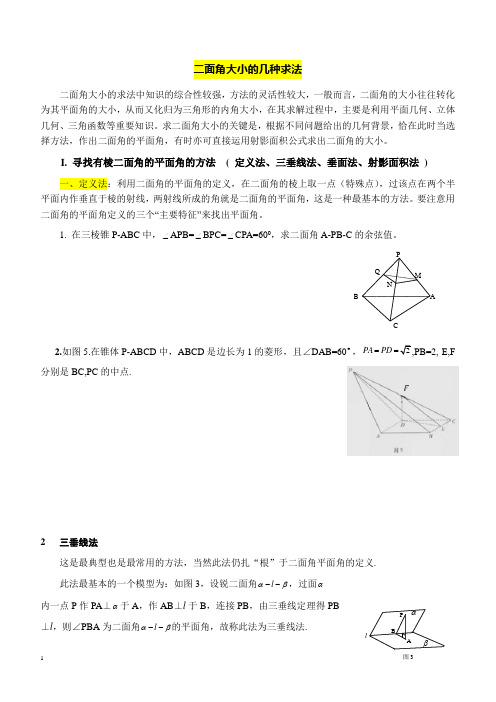
I. 寻找有棱二面角的平面角的方法 ( 定义法、三垂线法、垂面法、射影面积法 )一、定义法:利用二面角的平面角的定义,在二面角的棱上取一点(特殊点),过该点在两个半平面内作垂直于棱的射线,两射线所成的角就是二面角的平面角,这是一种最基本的方法。
要注意用二面角的平面角定义的三个“主要特征”来找出平面角。
1. 在三棱锥P-ABC 中,∠APB=∠BPC=∠CPA=600,求二面角A-PB-C 的余弦值。
2.如图5.在锥体P-ABCD 中,ABCD 是边长为1的菱形,且∠DAB=60︒,2PA PD ==,PB=2, E,F 分别是BC,PC 的中点.2 三垂线法这是最典型也是最常用的方法,当然此法仍扎“根”于二面角平面角的定义. 此法最基本的一个模型为:如图3,设锐二面角βα--l ,过面α 内一点P 作PA ⊥α于A ,作AB ⊥l 于B ,连接PB ,由三垂线定理得PB⊥l ,则∠PBA 为二面角βα--l 的平面角,故称此法为三垂线法.A BCNMP QAαβPBl最重要的是在“变形(形状改变)”和“变位(位置变化)”中能迅速作出所求二面角的平面角,再在该角所在的三角形(最好是直角三角形,如图3中的Rt △PAB)中求解.对于钝二面角也完全可以用这种方法,锐角的补角不就是钝角吗? 点金P43例23如图4,平面α⊥平面β,α∩β=l ,A ∈α,B ∈β,点A 在直线l 上的射影为A 1,点B 在l 的射影为B 1,已知AB=2,AA 1=1,BB 1=2,求:二面角A 1-AB -B 1的正弦值.分析与略解:所求二面角的棱为AB ,不像图3的那样一看就明白 的状态,但本质却是一样的,对本质的观察能力反映的是思维的深刻性.作A 1E ⊥AB 1于AB 1于E ,则可证A 1E ⊥平面AB 1B.过E 作EF ⊥A B 交AB 于F ,连接A 1F ,则得A 1F ⊥AB ,∴∠A 1FE 就是所求二面角的 平面角.依次可求得AB 1=B 1B=2,A 1B=3,A 1E=22,A 1F=23,则在Rt △A 1EF 中,sin ∠A 1FE=A 1E A 1F =63 .与图3中的Rt △PAB 比较,这里的Rt △A 1EF 就发生了“变形”和“变位”,所以要有应对各种变化,乃至更复杂变化的思想准备.4.如图,三棱柱111ABC A B C -中,侧面11BB C C 为菱形,1B C 的中点为O ,且AO ⊥平面11BB C C . (1)证明:1B C AB ⊥; (2)若1AC AB ⊥,o160CBB ∠=,1BC =,试画出二面角1A BC B --的平面角,并求它的余弦值.3 垂面法事实上,图1中的平面COC 1、图2(2)中的平面QMF 、图3中的平面PAB 、图4中的平面A 1FE 都是相关二面角棱的垂面,这种通过作二面角棱的垂面得平面角的方法就叫做垂面法.在某些情况下用这种方法可取得良好的效果.图4 B 1AαβA 1BlE5空间的点P 到二面角βα--l 的面α、β及棱l 的距离分别为4、3、3392,求二面角βα--l 的大小.寻找无棱二面角的平面角的方法 ( 射影面积法、平移或延长(展)线(面)法 )四、射影面积法:利用面积射影公式S 射=S 原cos θ,其中θ为平面角的大小,此方法不必在图形中画出平面角。
ABB AC450系统

ABB AC450控制系统--------满建江2012-12-19一、AC450 概括说明高级控制器AC450是一款高终端、高性能的过程控制器。
它的高的过程处理能力和灵活的通讯接口,使AC450控制器成为工业控制应用中的的理想选择。
此款控制器可以进行冗余配置,使得具有更高的可靠性。
产品特点:·逻辑和顺序控制·数据和文本处理·运算处理,报表和定位功能·调节控制功能包含模糊控制,高级PID和自整定控制·硬件和软件具有灵活的扩展性·基于FB+的系统总线具有完全模块化的控制器机架·当控制器满负荷工作时,自动配置功能使得额外增加的单元成为可能·可以扩展到最多5700个模拟和数字I/O点·支持现场和本地的人机界面操作,事件和报警处理,趋势显示功能等·具有很强的总线扩展能力·在Advent Fieldbus100 支持冗余总线通讯·Advent Fieldbus100 总线的最大长度可达13300米二、功能描述2.1控制器介绍控制器模块,具有8或16Mbyte的动态RAM,内存中含有正在应用的系统程序和控制器系统配置和应用程序。
微控制器是Motorola 68040,运行在25MHz。
系统程序备份在flash PROM 中,当系统启动时会装载在RAM中。
实际上标准的系统程序存储在一个程序卡中,此程序卡安装在MB100板上。
应用程序可以通过工程师站重新加载或则通过一个FLASH卡。
RAM的数据保存可以通过SB510或SB511电源单元。
CPU前面板上有4种工作模式分别为 1.清除内存2.停止3.自动启动4.离线2.2过程控制过程控制语言AMPL是以图形显示的功能块语言,我们将所建立的块叫做过程控制单元(PC elements)。
系统本身含有从简单到复杂的标准的功能块,除此之外,用户可以自定义功能块。
ABB机器人基础知识培训

图一
图二
七、IRC5 控制器系统生成
4、在(图三)中点击下一步 5、在弹出的窗口中,给新创建的系统命名并选择该系统文件的存储路径(不支持中文字 符)。然后点击按钮 下一步 (图四)。
图三
图四
七、IRC5 控制器系统生成
6、在弹出的窗口中,选择用来创建新系统的备份 (备份目录B中选择)。然后点击按钮 下一步(图五) 7、在(图六)中点击下一步
此泄流电阻和变频器的泄流电阻原理一致十四电路图的分析驱动单元驱动单元的一部分图十四电路图的分析24vdc电源smb接口主计算机网络接口驱动网络接口接触器板网络接口状态指示灯轴计算机是把机器语言转换成电信号传送到驱动单元十四电路图的分析轴计算机主驱动通讯主计算机通讯数据处理完后发出的信号十四电路图的分析plc发出工作命令经机器人主计算机处理后运行示教器上写的程序并把轨迹位置主计算机把编程语言转换成机器语言传送给轴计算机轴计算机把主机传送的信号处理后把机器语言转换成电信号传送给主驱动单元驱动机器人本体运行在运行的过程中smb板记录当前运行的数据编码器的数据并传送给轴计算机进行对比主机发送的轨迹位置和smb板记录的位置信号对比当数据相等并立即传送给主计算机主计算机发出停止信所有的安全信号满足机器人的整个运行链才能正常工作十四电路图的分析十五摇杆校正2设备在重启的过程中同时按住10s左右3点击centerjoystickcalibrate4向左操作摇杆十五摇杆校正5向右操作摇杆6向上操作摇杆十五摇杆校正6向下操作摇杆7向右旋转操作摇杆十五摇杆校正8向左旋转操作摇杆9点击中心位置校准完成设备重新启动十五摇杆校正十六精校正将档杆及检测装置固定在机器人上移动机器人使检测装置碰到档杆十六精校正十六精校正十六精校正十六精校正
机器人学习资料
电力心得总结范文

电力心得总结范文一、轮机自动化机舱我们首先参观的是校内的轮机自动化机舱,通过老师的精心讲解以及课后与老师的交流,使我们对轮船的自动化设备有了全面的初步了解,机舱是船舶的心脏,机舱自动化是船舶自动化最重要的组成部分。
机舱自动化的典型成就即...电站自动化系统;以及主机和船舶的安全系统。
其总体功能达到船舶正常航行时,轮机人员无须在机舱值守、操作和监视机电设备的运转,可在白天安排计划维修和日常维护。
二、厦门ABB开关有限公司我们第二次参观的是厦门ABB公司,厦门ABB开关有限公司是ABB集团于1992年在中国成立的第一家合资业,主要为客户提供3.6kV – 40.5kV中压开关设备和断路器等产品和服务。
公司目前已成为全球最大的中压开关柜和断路器生产制造商之一,可年产中压开关柜超过20,000台,断路器超过50,000台。
本公司的产品和服务已遍及中国每一个省份和自治区,并部分出口,涉及电力、石化、冶金、房地产、公共设施等各行各业。
公司全员劳动生产率、人均创利税、出口创汇额、高端市场占有率等均名列中国高压开关行业第一电气工程电力电子实习心得电气工程电力电子实习心得ABB生产的产品与服务:1不间断电源和电压调节:三相独立式不间断电源、三相模块化不间断电源、SINGLE-PHASE STANDALONE SYSTEMS [英文] 2半导体:门极可关断开关晶闸管(GTOS) 、压触型二极管模块、绝缘栅双极晶体管(IGBT)及二极管芯片、绝缘栅双极晶体管(IGBT)及二极管模块、晶闸管、集成门极换向晶闸管 (IGCT) 、SILICON SURGE VOLTAGE SUPPRESSORS [英文] 3电力电子:SYNCHROTACT? 同期设备、大功率整流器、发电、电力电子服务、电能质量、并网、励磁系统和组合方案、牵引变流器、控制系统、储能及电网稳定、SENSORY [英文] 4电气传动:逆变器和整流器:中压交流传动、太阳能逆变器、传动PC工具、传动服务、传动选件、低压交流传动、直流传动、电抗器、油浸、电磁冶金产品 5服务:带钢应用、钢液搅拌器和制动器、熔铝炉的电磁搅拌器 6低压产品:工业连接器 (工业插头和插座) 、开关类产品、开关插座、电网质量产品、电缆配线箱、低压配电系统、连接装置、线路保护产品、软件工具、封闭式开关和熔断器装置、控制产品、断路器类产品、智能建筑控制系统(KN_) 、楼宇对讲系统7熔断器类产品:箱壳类产品、SERVICE [英文] 变压器组件、电源组件、油处理 [英文] 、套管、调压开关、配电变压器组件、熔丝、COMPOSITES [英文] 8绝缘组件:发电机绝缘组件、高压环氧浇注绝缘件 9高压产品:互感器、气体绝缘、电容器、服务、高压避雷器、断路器 10中压产品:互感器和传感器、开关设备及马达控制开关设备、负荷开关/ 隔离开关、服务业务、柜体散件、故障电流限流器及灭弧器、重合器及分段器、真空灭弧室、接触器、断路器、模块式变电站、模块系统 /箱式变电站、熔丝及熔断器、避雷器发电机出口断路器 11电力保护继电器及自动化产品: Relion 、变电站自动化、配电保护及控制、输电保护和控制、电动机和发电机、Tract 、风力涡轮发电机、危险区域用电动机、同步发电机、同步电动机、伺服电动机和伺服传动器、低压电动机、直流电动机、高压感应 12机器人技术:机器人、行业应用、应用设备及产品、服务支持、软件、控制器 13变压器:干式、Dry-special [英文] 、Liquid-filled [英文] 、Service [英文]ABB是一家实力雄厚的电气类公司,经过ABB公司职员的介绍和自己上网的查找,我对ABB有了初步的了解,我们应该好好学习专业知识并不间断地增加电气自动化这类的新知识,使自己对电气工程及其自动化领域有时是的了解,毕业后可以进入象ABB这类公司工作,让人们放心用我们生产出的产品,为社会做出贡献。
用ABB机器人焊接中厚板的实践总结
用ABB机器人焊接中厚板的实践总结张雷振技术部2010-10-10在公司研发部林彦峰同事的培训资料里,有关ABB机器人基本的和高级的焊接指令及相关设置已有介绍。
其中基本焊接指令例如:ArcLStart、ArcCStart;ArcL、ArcC;ArcLEnd、ArcCEnd使用ABB机器人焊接工程机械的中厚板,只使用这些基本指令或程序是远远不够的。
在中厚板的焊接实践中,高级焊接指令和程序的应用必不可少,这些程序编写起来相对比较复杂。
我公司技术部蒋炳翔、洪开垦等老员工在中厚板调试焊接方面经验丰富,笔者在他们的细心指导下,总结了非常实用的高级焊接程序和焊接规范并列了出来和大家分享。
①智能寻位:SmarTac 智能寻位系统,寻位速度20mm/s时,最高精度可达±0.25mm在中厚板焊接中,首先对工件焊道焊缝进行寻位,通过PrePDisp指令把偏差值叠加后,再将结果计入pose中。
开始焊接前,首先使用PdispSet指令修正焊接所有目标点,当焊接结束后使用PdispOff关闭修正偏移值。
应用示例如下:Search_1D pose1, p1, p2, v200, tool1;Search_1D pose1, p3, p4, v200, tool1\PrePDisp:=pose1;PDispSet pose1;ArcLStart p5, v100, seam1, weld1, tool1;…ArcLEnd p10, v100, seam1, weld1, tool1;PDispOff;这里需要指出的是,如果是同一道焊道多层焊接,PdispOff可以不用使用。
②沟槽寻位:在智能寻位的基础上,焊枪针对沟槽进行一系列运动,计算出沟槽实际位置及宽度与编程时的偏移值,以得到真实沟槽位置及尺寸。
应用示例如下:Search_Groove pose1, GWS, p10, p20, 15, v1000, tool1;Search_Groove pose2, GWE, p30, p40, 15, v1000, tool1;…PDispSet pose1;ArcCalcLStart p50, v200, GWS, ad1, seam1, weld1, weave1,z50, tool1, track1;PDispSet pose2;ArcCalcLEnd p60, v200, GWE, ad1, z50, tool1;PDispOff;以中厚板焊接圆形沟槽为例,往往先把圆分为几段或几个位置点进行寻位,并且把各个位置的修正值加以区分记录下来。
ABB机器人学习资料

系统安全机器人系统复杂而且危险性大,以下的安全守则必须遵守。
∙万一发生火灾,请使用二氧化炭灭火器。
∙急停开关(E-Stop)不允许被短接。
∙机器人处于自动模式时,不允许进入其运动所及的区域。
∙在任何情况下,不要使用原始盘,用复制盘。
∙搬运时,机器停止,机器人不应置物,应空机。
∙意外或不正常情况下,均可使用E-Stop键,停止运行。
∙在编程,测试及维修时必须注意既使在低速时,机器人仍然是非常有力的,其动量很大,必须将机器人置于手动模式。
∙气路系统中的压力可达0.6MP,任何相关检修都要断气源。
∙在不用移动机器人及运行程序时,须及时释放使能器(Enable Device)。
∙调试人员进入机器人工作区时,须随身携带示教器,以防他人无意误操作。
∙在得到停电通知时,要预先关断机器人的主电源及气源。
∙突然停电后,要赶在来电之前预先关闭机器人的主电源开关,并及时取下夹具上的工件。
∙维修人员必须保管好机器人钥匙,严禁非授权人员在手动模式下进入机器人软件系统,随意翻阅或修改程序及参数。
第一章综述一、S4C系统介绍:全开放式对操作者友善最先进系统最多可接六个外围设备常规型号: IRB 1400,IRB 2400,IRB 4400,IRB 6400IRB 指 ABB 机器人,第一位数(1,2,4,6)指机器人大小第二位数( 4 )指机器人属于S4或S4C系统。
无论何型号,机器人控制部分基本相同。
IRB 1400:承载较小,最大承载为5kg,常用于焊接。
IRB 2400:承载较小,最大承载为 7kg ,常用于焊接。
IRB 4400:承载较大,最大承载为60kg 常用于搬运或大范围焊接。
IRB 6400:承载较大,最大承载为200kg,常用于搬运或大范围焊接。
二、机器人组成:机器人由两部分组成:Controller: 控制器。
Manipulator: 机械手。
操作人员通过示教器和操作盘操作机器人。
左边是示教器(Teach Pendant)。
初二奥数之等腰三角形的判定
初二奥数之等腰三角形的判定专题17 等腰三角形的判定阅读与思考在学习了等腰三角形性质与判定后,我们可以对等腰三角形的判定、证明线段相等的方法作出归纳总结.1.等腰三角形的判定:⑴从定义入手,证明一个三角形的两条边相等; ⑵从角入手,证明一个三角形的两个角相等. 2.证明线段相等的方法:⑴当所证的两条线段位于两个三角形,通过全等三角形证明; ⑵当所证的两条线段位于同一个三角形,通过等角对等边证明; ⑶寻找某条线段,证明所证的两条线段都与它相等. 善于发现、构造等腰三角形,进而利用等腰三角形的性质为解题服务,是解几何题的一个常用技巧.常见的构造方法有:平分线+平行线、平分线+垂线、中线+垂线.如图所示:例题与求解【例1】如图,在△ABC 中,AB =7,AC =11,点M 是BC 的中点,AD 是∠BAC 的平分线,MF ∥AD ,则CF 的长为____________.(全国初中数学竞赛试题)解题思路:角平分线+平行线易构造等腰三角形,解题的关键是利用条件“中点M ”.【例2】如图,在△ABC 中,∠B =2∠C ,则AC 与2AB 之间的关系是( ) A .AC >2AB B .AC =2AB C .AC ≤2AB D .AC <2AB(山东省竞赛试题)解题思路:如何条件∠B =2∠C ,如何得到2AB ,这是解本题的关键.ABD MFCABC【例3】两个全等的含300,600角的三角板ADE 和三角板ABC ,如图所示放置,E 、A 、C 三点在一条直线上,连结BD ,取BD 中点M ,连结ME ,MC ,试判断△EMC 的形状,并说明理由.(山东省中考试题)解题思路:从△ADE ≌△BAC 出发,先确定△ADB 的形状,为判断△EMC 的形状奠定基础.【例4】如图,已知在△ABC 中,AD 是BC 边上的中线,E 是AD 上一点,且BE =AC ,延长BE 交AC 于F ,求证:AF =EF .(天津市竞赛试题)解题思路:只需证明∠F AE =∠AEF ,利用中线倍长,构造全等三角形、等腰三角形.【例5】如图,在等腰△ABC 中,AB =AC ,∠A =200,在边AB 上取点D ,使AD =BC ,求∠BDC 度数.(“祖冲之杯”竞赛试题)解题思路:由条件知底角为300,这些角并不是特殊角,但它们的差却为600,600使我们联想到等边三角形,由此找到切入口.如图1,以BC 为边在△ABC 内作等边△BCO ;如图②,以AC 为边作等边△ACE .ABCMD EEA BDCFBCADB CA D图1O BCA D图2E能力训练A 级1.已知△ABC 为等腰三角形,由顶点A 所引BC 边的高线恰等于BC 边长的一半,则 ∠BAC =__________.2.如图,在Rt △ABC 中,∠C =900,∠ABC =660,△ABC 以点C 为中点旋转到△A ′B ′C 的位置,顶点B 在斜边A ′B ′上,A ′C 与AB 相交于D ,则∠BDC =_________.3.如图,△ABC 是边长为6的等边三角形,DE ⊥BC 于E ,EF ⊥AC 于F ,FD ⊥AB 于D ,则AD =_______.(天津市竞赛试题)4.如图,一个六边形的六个内角都是1200,其连续四边的长依次是1cm ,9cm ,9cm ,5cm ,那么这个六边形的周长是____________cm .(“祖冲之杯”邀请赛试题)5.如图,△ABC 中,AB =AC ,∠B =360,D 、E 是BC 上两点,使∠ADE =∠AED =2∠BAD ,则图中等腰三角形共有( )A .3个B .4个C .5个D .6个6.若△ABC 的三边长是a ,b ,c ,且满足44422a b c b c =+-,44422b a c a c =+-,44422c a b a b =+-,则△ABC ( ) A .钝角三角形B .直角三角形C .等腰直角三角形D .等边三角形(“希望杯”邀请赛试题)7.等腰三角形一腰上的高等于该三角形某一条边的长度的一半,则其顶角等于( )A .300B .300或1500C .1200或1500D .300或1200或1500(“希望杯”邀请赛试题)8.如图,已知Rt △ABC 中,∠C =900,∠A =300,在直线BC 或AC 上取一点P ,使得△P AB 是等腰三角形,则符合条件的P 点有( )A .2个B .4个C .6个D .8个(江苏省竞赛试题)ACDB B ′A ′(第2题)AB CDEF (第3题)(第4题)9915第5题图 第8题图 第9题图9.如图在等腰Rt △ABC 中,∠ACB =900,D 为BC 中点,DE ⊥AB ,垂足为E ,过点B 作BF ∥AC 交DE 的延长线于点F ,连接CF 交AD 于G .⑴ 求证:AD ⊥CF ;⑵ 连结AF ,度判断△ACF 的形状,并说明理由.10.如图,△ABC 中,AD ⊥BC 于D ,∠B =2∠C ,求证:AB +BD =CD .(天津市竞赛试题)11.如图,已知△ABC 是等边三角形,E 是AC 延长线上一点,选择一点D ,使得△CDE 是等边三角形,如果M 是线段AD 的中点,N 是线段BE 的中点,求证:△CMN 是等边三角形.(江苏省竞赛试题)12.如图1,Rt △ABC 中,∠ACB =900,CD ⊥AB ,垂足为D ,AF 平分∠CAB ,交CD 于点E ,交CB 于点F .BCABACD EBCADFG E B ACDAC ENMB D⑴ 求证:CE =CF ;⑵ 将图1中的△ADE 沿AB 向右平移到△A ′D ′E 的位置,使点E ′落在BC 边上,其他条件不变,如图2所示,试猜想:BE ′与CF 有怎样的数量关系?请证明你的结论.(山西省中考试题)B 级1.如图,△ABC 中,AD 平分∠BAC ,AB +BD =AC ,则∠B :∠C 的值=__________.2.如图,△ABC 的两边AB 、AC 的垂直平分线分别交BC 于D 、E ,若∠BAC +∠DAE =1500,则∠BAC 的度数是____________.3.在等边△ABC 所在平面内求一点P ,使△P AB 、△PBC 、△P AC 都是等腰三角形,具有这样性质的点P 有_________个.4.如图,在△ABC 中,∠ABC =600,∠ACB =450,AD 、CF 都是高,相交于P ,角平分线BE 分别交AD 、CF 于Q 、S ,则图中的等腰三角形的个数是( )A .2B .3C .4D .55.如图,在五边形ABCDE 中,∠A =∠B =1200,EA =AB =BC =12DC =12DE ,则∠D =( ) A .300B .450C .600D .67.50(“希望杯”竞赛试题)6.如图,∠MAN =160,A 1点在AM 上,在AN 上取一点A 2,使A 2A 1=AA 1,再在AM 上取一点A 3,使A BDFE C图1A B D FEC图2A ′E ′D ′ABC D(第1题)(第2题)ABD E CA BD CEF PQS (第4题)A B CED第5题AA 1NMA 2A 3(第6题)A 3A 2=A 2A 1,如此一直作下去,到不能再作为止,那么作出的最后一点是( )A .A 5B .A 6C .A 7D .A 87.若P 为△ABC 所在平面内一点,且∠APB =∠BPC =∠CP A =1200,则点P 叫作△ABC 的费尔马点,如图1.⑴若点P 为锐角△ABC 的费尔马点,且∠ABC =600,P A =3,PC =4,则PB 的值为_____.⑵如图2,在锐角△ABC 外侧作等边△ACB ′,连结BB ′.求证:BB ′过△ABC 的费尔马点P ,且BB ′=P A +PB +PC .(湖州市中考试题)8.如图,△ABC 中,∠BAC =600,∠ACB =400,P 、Q 分别在BC 、AC 上,并且AP 、BQ 分别是∠BAC 、∠ABC 的角平分线,求证:BQ +AQ =AB +BP .(全国初中数学联赛试题)9.如图,在△ABC 中,AD 是∠BAC 的平分线,M 是BC 的中点,过M 作ME ∥AD 交BA 延长线于E ,交AC 于F ,求证:BE =CF =12(AB +AC ). (重庆市竞赛试题)ABCPACBB ′图1图2ABPQC10.在等边△ABC 的边BC 上任取一点D ,作∠DAE =600,DE 交∠C 的外角平分线于E ,那么△ADE 是什么三角形?证明你的结论.(《学习报》公开赛试题)11.如图,在平面直角坐标系中,O 为坐标原点,直线l :12y x m =-+与x 轴、y 轴的正半轴分别相交于点A 、B ,过点C (-4,-4)作平行于y 轴的直线交AB 于点D ,CD =10.⑴求直线l 的解析式;⑵求证:△ABC 是等腰直角三角形;⑶将直线l 沿y 轴负方向平移,当平移恰当的距离时,直线与x ,y 轴分别相交于点A ′、B ′,在直线CD 上存在点P ,使得△A ′B ′P 是等腰直角三角形,请直接写出所有符合条件的点P 的坐标.(宁波市江东区模拟题)12.如图1,在平面直角坐标系中,△AOB 为等腰直角三角形,A (4,4).ABD MCFE BACO Dyx⑴ 求B 点坐标; ⑵ 如图2,若C 为x 轴正半轴上一动点,以AC 为直角边作等腰直角△ACD ,∠ACD =900,连接OD ,求∠AOD 度数;⑶ 如图3,过点A 作y 轴于E ,F 为x 轴负半轴上一点,G 在EF 的延长线上,以EG 为直角边作等腰Rt △EGH ,过A 作x 轴垂线交EH 于点M ,连接FM ,等式AM FMOF=1是否成立?若成立,请证明;若不成立,说明理由.B AOxyB AOxyC DB AO xyEFGH M 图1 图2图3专题17 等腰三角形的判定例1 延长MF ,BA 交于E ,延长FM 至点P ,使MP =MF ,连BP ,则△BMP ≌△CMF ,∴BP =CF .∵AD 平分∠BAC ,AD ∥FM ,∠BAD =∠DAC =∠MFC =∠AFE =∠E =∠P ,∴AE =AF ,BE =BP ,即AB +AE =AB +AF =AB +AC -CF =CF ,∴CF =12(AB +AC )= 12(7+11)=9.例 2 D例 3 提示:△EMC 为等腰直角三角形,连AM ,易证:△ADE ≌△BAC .∴AD =AB , 又∠DAB =90°.又∵M 为BD 中点,∴AM ⊥DB 且DM =BM =AM . 又∵∠MDE =∠MAC =105°,∴△EDM ≌△CAM . ∴EM =MC ,∠DME =∠AMC , ∴∠DME +∠EMA =∠AMC +∠EMA =90°. ∴△EMC 为等腰直角三角形.例4延长AD 至G ,使DG =AD ,连接BG . 由△ADC ≌△GDB ,得AC =BG ,AC ∥BG . ∵BE =AC ,∴BE =BG ,得∠BED =∠BGD , ∴∠F AE =∠BGD =∠BED =∠AEF , 故AF =EF .例5 提示:结合图1,给出解答过程.由图形的轴对称性知:△ABO ≌△ACO ,∴∠BAO =∠CAO =10°,∴∠ABO =∠ACO =20°,∴∠AOB =∠AOC =150°.又∵BO =BC =CO = AD ,∴△ACD ≌△CAO ,∴∠AOC =∠CDA =150°,故∠BDC =30°.A 级1.90°或75°或15°2.72°3.24.375.D6.D 提示:将三式相加7.D8.C9.⑴先证△ACD ≌△CBF ,∴∠CAD =∠BCF .又∵∠CAD +∠CDG =∠BCF +∠CDG =90°, ∴∠CGD =90°,∴AD ⊥CF . ⑵△ACF 为等腰三角形.10.提示:延长DB 至E ,使BE =AB ,连结AE ,证明∠E =∠C ,AC =AE . 11. 提示:证明△DCA ≌△ECB 、△DCM ≌△ECN ,∠NCM =60°. 12. ⑴提示:先证明∠CEF =∠CFE .⑵作EG ⊥AC 于G ,证明△CEG ≌△BE ´D ´,可得CE = BE ´,又CF =CE ,BE ´=CF .B 级1.2:12.110°3.104.D5.C 提示:在五边形内作等边三角形ABF ,则E 、F 、C 在一条直线上.6.B7. 提示:⑴23 ⑵ 在BB ´上取点P ,使∠BPC =120°,再在PB ´上取点E 使PE =PC ,连结CE . 则由△PCE 为等边三角形,可得:PC =CE ,∠PCE =60°,∠CEB ´=120°∵△ACB ´为正三角形,∴可证:△ACP ≌△B ´CE . ∴∠APC =∠B ´EC =120°,P A =EB ´.ABCGDEF∴∠APC =∠BPC =∠CP A =120°,∴P 为△ABC 的费马点.∴BB ´过△ABC 的P ,且BB ´=EB ´+PB +PE =P A +PB +PC .8. 提示:延长AB 至M ,使BM =BP ,连结PM ,则AB +BP =AM ,可证明BQ =QC .∴AQ +QB =AQ +QC =AC ,又由△AMP ≌△ACP 得AM =AC ,故AB +BP =AQ +BQ .9. 提示:延长FM 至P ,使PM =FM ,连结BP ,则△BMP ≌△CMF ,AE =AF ,BE =BP .10. 提示:当D 为BC 的端点,显见△AED 是等边三角形;当D 为BC 边的中点,取AC 的中点F ,连接DF ,易证△CDF 为等边三角形,又△ADF ≌△EDC ,故△ADE 为等边三角形.猜测:当D 为BC 上任意点时,△ADE 也为等边三角形.11.(1)142y x =-+; (2)过点C 作CH ⊥y 轴于H ,证明△AOB ≌△BHC 即可;(3)符合条件的P 点共有5个,分别为()()()()84,12,4,,4,8,4,4,4,43⎛⎫-------- ⎪⎝⎭. 12.提示:(1)B (8,0);(2)如图a ,过A 作AS ⊥OB 于S ,过D 作DT ⊥x 轴于T .∵△OAB 为等腰直角三角形,∴OS =AS =BS ,再由△ASC ≌△CTD ,可得:AS =CT ,SC =TD .∴CT =AS =OS ,∴OT =CS =TD .∴∠TOD =45°,则∠AOD =90°;(3)等式成立,理由如下:如图b ,在AM 上截取AS =OF ,连ES ,可证△EAS ≌△EOF ,可得:ES =EF ,∠AES =∠OEF∴∠SEF =∠AEO =90°,∴∠FEM =∠SEM =45°.又∵EM =EM ,∴△EFM ≌△ESM ,∴FM =SM ,∴AM =AS +SM =OF +FM ,∴1AM FM OF-=. x y T S A B O D C x y C S F A M H O G E 图a 图b。
2024版ABB工业机器人基础知识
工业机器人能够自动化地完成生产线上的重复性工作,大幅提高生产效率。
提高生产效率机器人可以替代部分人力,降低企业的劳动成本。
降低劳动成本机器人操作精确度高,可以减少人为因素导致的产品质量问题。
提升产品质量工业机器人能够在高温、低温、高辐射等恶劣环境下工作,保障生产安全。
适应恶劣环境目的和背景智能化随着人工智能技术的发展,工业机器人将越来越智能化,能够自主识别、学习和决策。
柔性化机器人将具备更高的灵活性和适应性,能够适应不同种类和规格的产品生产。
协同化人机协作将成为未来工业机器人的重要发展方向,实现人与机器人的协同作业。
数字化工业机器人的数字化程度将不断提高,实现与工业互联网、大数据等技术的深度融合。
机器人技术发展趋势01020304ABB 是全球领先的工业机器人制造商之一,拥有悠久的历史和丰富的产品线。
品牌介绍ABB 工业机器人以高精度、高速度、高可靠性著称,广泛应用于汽车、电子、物流等领域。
产品特点ABB 在工业机器人领域拥有多项专利技术,如独特的运动控制算法、先进的传感器技术等。
技术优势ABB 工业机器人在全球范围内有大量的应用案例,如帮助汽车制造商提高生产效率、协助物流企业实现自动化分拣等。
应用案例ABB 工业机器人概述01机械臂由多个连杆和关节组成,实现空间运动。
02末端执行器根据应用需求,配备不同的工具或夹具。
03本体材料采用高强度金属材料,确保机器人刚性和稳定性。
机器人本体结构03负责机器人运动规划、轨迹计算、传感器数据处理等任务。
控制器包括电机、减速器等部件,实现机器人关节的精确运动。
驱动系统采用先进的控制算法,确保机器人运动精度和稳定性。
控制算法控制器与驱动系统检测机器人关节位置和姿态。
位置传感器通过图像处理技术,实现目标识别、定位、跟踪等功能。
视觉传感器检测机器人末端执行器受到的力和力矩。
力和力矩传感器如触觉传感器、听觉传感器等,增强机器人的环境感知能力。
其他传感器传感器及感知技术机器人分类及应用领域搬运机器人喷涂机器人用于物流、机场行李运输等场景的物料搬运。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GSD(电子设备数据)文件
1.产生FCB源码文件
在FCB中产生的应用程序存放在下列目录的*.OBD文件中:
C:\PROJ\proj_name\NODES\node_name\
从这个文件我们需要为数据库和每个PC程序产生单独的源码文件。用于DB的文件存 放在下面目录:
C:\PROJ\proj_name\NODES\node_name\DBDATA\
S7-300的通讯模块CP342-5可以工作在从站模式,可以实现与AC450 通讯。对于S7-200或S7-400系列,由于CPU无法工作在从站模式,无法直 接通讯,后来采用DP/DP Coupler(一种网关)来进行中转,得以实现与 AC450的通讯。
下面介绍通讯的基本配置和关键问题。
主站:ABB AC450 PLC(带CI541卡)
处理模块不执行应用程序可以组态控制器系统和应用程序。
-3(P3) STOPPED工作模式:
处理器模块一点儿不执行程序,主CPU完成自检以检测控制器
的一些基本功能,过程输出是定义的状态(零)。
-4(P4) OFFLINE工作模式:
过程控制器只执行低层的故障跟踪命令。过程输出是定义的状
态(零)。
冗余处理模块的信息:
☆注:正常位置是AUTO。
2.3 CI546(Ethernet通讯板)
2.4 CS513(MB300通讯板)
用于MPI网络时
例子:用于MB300通讯
2.5 PU516
驱动安装注意:
2.6 其他板卡
3.Master Bus 300通讯
Master Bus300通讯:
控制网络的通讯总线。用于连接Advant OCS自动化系统中的各 个站。他有效的将通讯功能从其余的系统中隔离,因此可以以最小 的影响完全自由地对应用程序进行扩展或对网络更改结构。最多可 以连接45个站在一个MB300上。
可以扩展到最多5700个模拟和数字I/O点。冗余处理器模 块,具有8OR16Mbyte动态RAM,Motorola 68040,工作在 25MHz。
S100I/O板放在I/O机架里,每个S100I/O根据类型不同有 4-32个通道,每个机架有21个槽,经总线扩展(光纤最长 500m)可达5个I/O机架。
MB300通讯时,工程师站需要安装PU516板,与AC450上的CS513 板连接,示意图如下:
DP线
交叉线
DP线
4.AC450编程语言、编程软件
4.1 编程语言AMPL
AC450控制器的编程语言采用AMPL(即ABB master programming language),这是一种用图形表示的功能模块化的编程语言,专门为 过程控制应用而开发。
模式选择旋钮
子插槽 通讯
工作模式
处理器模块前的LED代码指示其工作模式,分别为P1、 P2、-3(P3)和-4(P4)。
P1
OPERATION工作模式:
处理器模块执行应用程序,这是一个Advant控制器的正常状态,
在这种模式下可以完成控制任务并控制过程输出。
P2
CONFIGURATION工作模式:
框架构成:
CPU-固化的系统软件和 应用程序
通讯子模块 系统软件备份子模块 带充电的备用电源模块 5V主电源调节器 系统管理模块 其他子插槽
实验室现有模块类型:
2.1 机架:RF522
电压调节器
提供 备用电源
CPU母板
MB300 通讯子板
同步 时钟信号
HTC通讯板 无CPU母板
后备单元和主单元都有下列工作方式:STANDBY,UPGRADING,STOPPE和OFFLINE。 在后备处理器模块前的LED用代码指示其工作模式:b1、b2、-3或-4。其中
b1为STANDBY工作模式,b2为UPGRADING工作模式。 1.AUTO(热启动):
如果控制器在CONFIGURATION或OPERATION工作模式,它仍然保留 CONFIGURATION或OPERATION工作模式。模式选择开关打到位置1(AUTO),按下 按钮(ENTER)。 2.STOP:
例如:#CRDB CI541。(CI541板是Profibus DP通讯板。) #END 退出
7.修改DB元素(命令:#MDB 目标名称)
例如:对前面CI541产生的PB2元素进行修改。 命令:#MDB PB2(这里不是CI541)。
8.设计PC结构(命令:#IS PCx)
例如:#IS PC1 Available space in area PC:291 kbyte DB connection:100% local data:100% PC1 T PCPGM(20,1) PC1.1 T CONTRM(250,0) PC1.1.1 T AND(3) PC1.1.2 T OR(2) PC1.1.3 T !
进入STOPPED工作模式。 3.CLEAR(冷启动):
清除RAM(控制器系统组态和应用程序被清除)系统软件安装在RAM,控制器 进入CONFIGURATION模式。模式选择开关打到位置3(Clear),按下按钮 (ENTER),或输入命令RECONFIG,CPU冷启动。 4.OFFLINE:
进入OFFLINE模式。
4.3.1 On-Line Builder在线设计程序步骤 1.启动Application Builder 2.产生或打开一个Project和Node
3.启动On-Line Builder 1 2
3
4.定义DB部分的大小(命令:#DIMDB)
5.定义PC部分的大小(命令:#DIMPC)
6.产生DB元素(命令:#CRDB 调用名)
PC源码文件(*.AAX) DB源码文件(*.BAX)
(*.AA) (*.BA)
3.控制器的标定
根据在FCB中产生的应用程序的需要标定DB。用命令#DIMDB和#DIMPC。方法和ONB 中的标定方法相同。
4.下载源码
用TRDBS命令将DB装入到控制器中: TRDBS SRCE:*(.BA)
用TRPCS命令将PC程序装入到控制器中:
2.允许和禁止BUILD模式
用#EBM命令对已存在的PC程序进行改 变和增加。 用#DIBM命令结束一个或几个PC程序 的建立。
3.列出系统和PC程序的状态
用#LSS命令列出系统和PC程序的状态。 列表显示处于BUILD模式、BLOCKED或 UNBLOCKED模式的模块以及过程控制器 的工作模式。
11.PC程序设置成Unblock模式,命令:#DIBM PCx,#DBL PCx
1.封锁和解锁PC程序 可以封锁或解锁:
一个或所有PC程序; 一个或多个PC程序中的一个执行 单 元(PCPGM,MASTER,CONTRM或SEQ)或所 有执行单元。 从指定执行单元或PC程序来的到数据 库去的输出(不是到执行单元的输出)。 封锁/解锁从几个PC程序中的所有执 行单元来的到数据库去的输出数据。
用于PC程序的文件存放在下面目录:
C:\PROJ\proj_name\NODES\node_name\PCDATA\
这些源码要用Application Builder进行转换,转换的用与DB和PC的文件存放在下 面的目录:
C:\PROJ\proj_name\NODES\node_name\SRCE\
12.备份应用程序,命令:#DUAP XXXXXXX
4.3.2 Function Chart Builder设计程序步骤 1.启动Application Builder 2.产生或打开一个Project和Node 3.启动Function Chart builder 1 2
3
4.在*.ODB窗口选择DB,产生数据库元素
它的基本单位是PC(process control)元素,每一个PC元素执行 一个完整的功能,例如计数器、延时PC元素、或模拟控制器,每个PC 元素用一种描述它功能的模块表示,每一种功能模块由带若干输入、 输出管脚的模块组成。
除了PC元素外,AMPL还包含一些结构元素,用于将PC元素分成适 当的模块,以便对某一段程序进行单独地控制和执行。同时,可以给 这些程序块设定不同的循环时间和优先级。
屏幕上就会显示:
9.连接PC元素(命令:#C PCx)
10.启动模式、工作模式和命令之间的关系
开始点:
控制器包含一个在OPERATION或 CONFIGURATION工作 模式的应用。
事件:
电源故障/电源断开,然后又上电。 用户按ENTER按钮
组态模式切换: #ECONFIG P1 P2; #DICONFIG P2 P1。
通过最多7个Master Fieldbuses(S400I/0)或最多8个 Advant Fieldbus100(S800I/0),可以连接分布式I/O系统、 S400I/O系统和S400I/O模块。
控制网络:MasterBus300总线
单独使用的过程控制器
控制网络组态
2.AC450硬件介绍
TRPCS SRCE:*(.AA)
5.将PC程序置为Unblocked模式
用#LSS命令可以列出系统和PC程 序的状态。列表显示处于BUILD模式、 BLOCKED或UNBLOCKED模式的模块以及 过程控制器的工作模式。
5.AC450与西门子PLC通讯
概述
由于AC450的CI541只能作为主站,所以另一方必须是DP从站。理论上 说,S7-300带DP功能的CPU都可以作为从站工作,比较容易实现与S7系列 PLC之间的通讯,但是在多次实验中却无法实现与AC450的通讯。
输入板子的类型 选择转换参数
5.修改数据库元素
选择要修改的元素 点击Edit按钮编辑DB元素 点击Delete按钮删除DB元素
输入修改的目标名 输入适当的属性