自动化专业英语(翻译)P2U6教学课件
P1U6教学课件
doubly-fed
双馈
wound field Surface magnet Variable reluctance machines
绕线式激磁 凸磁极 变阻抗电机
Radial or axial gap 径向或轴向气隙 interior (buried) magnet trapezoidal 内磁极 梯形波磁场
phase winding wound-rotor machine non-salient pole
相绕组 绕线转子电机
embedded in slots
镶嵌在槽中
laminated 层压铁磁钢片 ferromagnetic steel sheets
非凸极结构
Fig.1-6A-1 shows an idealized three-phase, two-pole induction motor where each phase winding in the stator and rotor is represented by a concentrated coil. The three-phase windings are distributed sinusoidally and embedded in slots. In a wound-rotor machine, the rotor winding is similar to that of the stator, but in a cage machine, the rotor has a squirrel cage-like structure with shorted end rings. Basically, the machine can be looked upon as a three-phase transformer with a rotating and shot-circuited secondary. Both stator and rotor cores are made with laminated ferromagnetic steel sheets. The air gap in the machine is practically uniform (non-salient pole).
自动化专业英语全文翻译
《自动化专业英语教程》-王宏文主编-全文翻译PART 1 Electrical and Electronic Engineering BasicsUNIT 1 A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2 A The Operational Amplifier ———————————5B TransistorsUNIT 3 A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4 A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5 A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6 A AC Machines ———————————————19B Induction Motor DriveUNIT 7 A Electric Power System ————————————22B Power System AutomationPART 2 Control TheoryUNIT 1 A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29UNIT 2 A Stability and the Time Response —————————30B Steady State—————————————————31UNIT 3 A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33UNIT 4 A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in Automation UNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
自动化专业英语教材翻译(part3 U1-U5)
If zero, branch to location 4 XXXX: not used (or “don‟t care”)
... ...
„1‟ from location 8 XXXX XXXX 0100
图3-1A-2 程序和数据在内存中的安排
P3U1A Computer Structure and Function
控制器 控制器提供了程序周期内取自寄存器每条 指令的控制信号的适宜顺序。一个总程序周期是由许多指令 周期组成,每个指令周期可分为它部件的机器周期,每个机 器周期由许多时钟周期组成。
P3U1A Computer Structure and Function
第三部分第一单元课文A
计算机的结构与功能
例如图3-1A-4, 逻辑 为了取回一条指令, 电平 程序计数器中的地 址放到在时钟周期 时钟 C1上升沿的外部总 线的地址线上。同 状态 时,利用控制线上 =OF 的一个代码,CPU 通知所有连接到总 16 位 线上的设备,即 地址 CPU正执行一个 “操作码取回”的 8 位 机器周期。存储器 数据 允许存储器寻址去 选择包含指令的存 1 位 控 储器单元。在C2段,制 控制器将“读”命 = 读 令放到控制总线上, 允许存储器数据放 到数据线上。
指令寄存器 当一条指令取回来,它被复制到指令寄存器
内,并被译码。译码意味着检查操作代码并用于确定执行顺序 的各步 CPU的编程器模型 可由编程器检查或修改的寄存器集 称为CPU的编程器模型。由指令集操作或明显受硬件输入或 数据操作的结果影响的一类寄存器是模型中表示的寄存器。
P3U1A Computer Structure and Function
总线缓冲区
总线缓冲区
总线缓冲区
自动化专业英语教程Part2翻译
P2U1A The World of Control第二部分第一单元课文A 控制的世界▪自动化专业英语教程▪教学课件P2U1A The World of Control第二部分第一单元课文A 控制的世界A 控制的世界1.课文内容简介:这是一篇关于专业课《自动控制原理》、《现代控制理论》的综述性文章。
主要介绍控制的基本概念、起源、功能、控制系统的分类和术语、控制系统工程设计问题等内容。
4. 难句翻译[1] The reaction time of a human pilot is too slow to enable him or her to fly an aircraft witha lightly damped Dutch roll mode without a yaw damper system.▪飞行员的反应速度太慢,如果不附加阻尼偏航系统,飞行员就无法通过轻微阻尼的侧倾转向方式来驾驶飞机。
[2] Since the output is fed back in a functional form determined by the nature of the feedbackelements and then subtracted from the input…▪因为输出会以由反馈部件特性决定的函数形式反馈回来,然后从输入中减去……5. 参考译文A 控制的世界简介控制一词的含义一般是调节、指导或者命令。
控制系统大量存在于我们周围。
在最抽象的意义上说,每个物理对象都是一个控制系统。
控制系统被人们用来扩展自己的能力,补偿生理上的限制,或把自己从常规、单调的工作中解脱出来,或者用来节省开支。
例如在现代航空器中,功率助推装置可以把飞行员的力量放大,从而克服巨大的空气阻力推动飞行控制翼面。
飞行员的反应速度太慢,如果不附加阻尼偏航系统,飞行员就无法通过轻微阻尼的侧倾转向方式来驾驶飞机。
自动飞行控制系统把飞行员从保持正确航向、高度和姿态的连续操作任务中解脱出来。
自动化专业英语中英对照

自动化专业英语中英对照第一篇:自动化专业英语中英对照自动化专业英语中英文对照 retarding torque 制动转矩inductive component 感性(无功)分量 abscissa axis 横坐标induction generator 感应发电机synchronous generator 同步发电机automatic station 无人值守电站hydropower station 水电站process of self – excitation 自励过程auxiliary motor 辅助电动机technical specifications 技术条件voltage across the terminals 端电压steady – state condition 瞬态暂态reactive in respect to 相对….呈感性active in respect to 相对….呈阻性synchronous condenser 同步进相(调相)机coincide in phase with 与….同相synchronous reactance 同步电抗algebraic 代数的algorithmic 算法的biphase 双相的bilateral circuit 双向电路bimotored 双马达的corridor 通路shunt displacement current 旁路位移电流leakage 泄漏lightning shielding 避雷harmonic 谐波的insulator string 绝缘子串neutral 中性的zero sequence current 零序电流sinusoidal 正弦的square平方corona 电晕,放电bypass 旁路voltmeter 电压表ammeter 电流表micrometer 千分尺thermometer 温度计watt-hour meter 电度表wattmeter 电力表private line 专用线路diameter 直径centimeter 厘米restriking 电弧再触发magnitude 振幅oscillation 振荡auxiliary 辅助的protective gap 保护性间隙放电receptacle 插座lightning arrester 避雷装置bushing 套管trigger 起动装置stress 应力deterioration 损坏,磨损spark gap 火花放电隙traveling-wave 行波wye-connected 星形连接enclosure 设备外壳live conductor 带电导体fuse 熔断器structural 结构上的out-of-step 不同步的resynchronize 再同步synchroscops 同步指示器automatic oscillograph 自动示波器nominally 标称sampling 采样potential transformer 电压互感器fraction 分数switchyard 户外配电装置hazard 危险bushing 高压套contact 触点energize 励磁trip coil 跳闸线圈over-current relay 过电流继电器armature 衔铁pickup current 始动电流release current 释放电流solenoid relay 螺管式继电器induction-disc relay 感应圆盘式继电器cast-aluminum rotor 铸铝转子bronze 青铜horsepower 马力random-wound 散绕insulation 绝缘ac motor 交流环电动机end ring 端环alloy 合金inverse time relay 反时限继电器hydraulic 液力的dashpot 阻尼器pneumatic 气动的permanent magnet 永磁体electrical stressing 电气应力mechanical stressing 机械应力deviation 偏差third harmonic voltage 三次谐波电压induction machine 感应式电机horseshoe magnet 马蹄形磁铁magnetic field 磁场eddy current 涡流right-hand rule 右手定则left-hand rule 左手定则slip 转差率induction motor 感应电动机rotating magnetic field 旋转磁场winding 绕组stator 定子rotor 转子induced current 感生电流time-phase 时间相位exciting voltage 励磁电压solt 槽lamination 叠片laminated core 叠片铁芯short-circuiting ring 短路环squirrel cage 鼠笼rotor core 转子铁芯coil winding 线圈绕组form-wound 模绕performance characteristic 工作特性frequency 频率revolutions per minute 转/分motoring 电动机驱动generating 发电per-unit value 标么值breakdown torque 极限转矩breakaway force 起步阻力overhauling 检修wind-driven generator 风动发电机revolutions per second 转/秒number of poles 极数speed-torque curve 转速力矩特性曲线plugging 反向制动synchronous speed 同步转速percentage 百分数locked-rotor torque 锁定转子转矩full-load torque 满载转矩prime mover 原动机inrush current 涌流magnetizing reacance 磁化电抗line-to-neutral 线与中性点间的staor winding 定子绕组leakage reactance 漏磁电抗no-load 空载full load 满载Polyphase 多相(的)iron-loss 铁损complex impedance 复数阻抗rotor resistance 转子电阻leakage flux 漏磁通locked-rotor 锁定转子chopper circuit 斩波电路separately excited 他励的compounded 复励dc motor 直流电动机de machine 直流电机speed regulation 速度调节shunt 并励series 串励armature circuit 电枢电路optical fiber 光纤interoffice 局间的waveguide 波导波导管bandwidth 带宽light emitting diode 发光二极管silica 硅石二氧化硅regeneration 再生, 后反馈放大coaxial 共轴的,同轴的high-performance 高性能的carrier 载波mature 成熟的Single SideBand(SSB)单边带coupling capacitor 结合电容propagate 传导传播modulator 调制器demodulator 解调器line trap 限波器shunt 分路器Amplitude Modulation(AM 调幅Frequency Shift Keying(FSK)移频键控tuner 调谐器attenuate 衰减incident 入射的two-way configuration 二线制generator voltage 发电机电压dc generator 直流发电机polyphase rectifier 多相整流器boost 增压time constant 时间常数forward transfer function 正向传递函数error signal 误差信号regulator 调节器stabilizing transformer 稳定变压器time delay 延时direct axis transient time constant 直轴瞬变时间常数transient response 瞬态响应solid state 固体buck 补偿operational calculus 算符演算gain 增益pole 极点feedback signal 反馈信号dynamic response 动态响应voltage control system 电压控制系统mismatch 失配error detector 误差检测器excitation system 励磁系统field current 励磁电流transistor 晶体管high-gain 高增益boost-buck 升压去磁feedback system 反馈系统reactive power 无功功率feedback loop 反馈回路automatic Voltage regulator(AVR)自动电压调整器reference Voltage 基准电压magnetic amplifier 磁放大器amplidyne 微场扩流发电机self-exciting 自励的limiter 限幅器manual control 手动控制block diagram 方框图linear zone 线性区potential transformer 电压互感器stabilization network 稳定网络stabilizer 稳定器air-gap flux 气隙磁通saturation effect 饱和效应saturation curve 饱和曲线flux linkage 磁链per unit value 标么值shunt field 并励磁场magnetic circuit 磁路load-saturation curve 负载饱和曲线air-gap line 气隙磁化线polyphase rectifier 多相整流器circuit components 电路元件circuit parameters 电路参数electrical device 电气设备electric energy 电能primary cell 原生电池energy converter 电能转换器conductor 导体heating appliance 电热器direct-current 直流time invariant 时不变的self-inductor 自感mutual-inductor 互感the dielectric 电介质storage battery 蓄电池e.m.f = electromotive fore 电动势unidirectional current 单方向性电流circuit diagram 电路图load characteristic 负载特性terminal voltage 端电压external characteristic 外特性conductance 电导volt-ampere characteristics 伏安特性carbon-filament lamp 碳丝灯泡ideal source 理想电源internal resistance 内阻active(passive)circuit elements 有(无)源电路元件leakage current 漏电流circuit branch 支路P.D.= potential drop 电压降potential distribution 电位分布r.m.s values = root mean square values 均方根值effective values 有效值steady direct current 恒稳直流电sinusoidal time function 正弦时间函数complex number 复数Cartesian coordinates 笛卡儿坐标系modulus 模real part 实部imaginary part 虚部displacement current 位移电流trigonometric transformations 瞬时值epoch angle 初相角phase displacement 相位差signal amplifier 小信号放大器mid-frequency band 中频带bipolar junction transistor(BJT)双极性晶体管field effect transistor(FET)场效应管electrode 电极电焊条polarity 极性gain 增益isolation 隔离分离绝缘隔振emitter 发射管放射器发射极collector 集电极base 基极self-bias resistor 自偏置电阻triangular symbol 三角符号phase reversal 反相infinite voltage gain 无穷大电压增益feedback component 反馈元件differentiation 微分integration 积分下限impedance 阻抗fidelity 保真度summing circuit 总和线路反馈系统中的比较环节Oscillation 振荡inverse 倒数admittance 导纳transformer 变压器turns ratio 变比匝比ampere-turns 安匝(数)mutual flux 交互(主)磁通vector equation 向(相)量方程power frequency 工频capacitance effect 电容效应induction machine 感应电机shunt excited 并励series excited 串励separately excited 他励self excited 自励field winding 磁场绕组励磁绕组speed-torque characteristic 速度转矩特性dynamic-state operation 动态运行salient poles 凸极excited by 励磁field coils 励磁线圈air-gap flux distribution 气隙磁通分布direct axis 直轴armature coil 电枢线圈rotating commutator 旋转(整流子)换向器commutator-brush combination 换向器-电刷总线mechanical rectifier 机械式整流器armature m.m.f.wave 电枢磁势波Geometrical position 几何位置magnetic torque 电磁转矩spatial waveform 空间波形sinusoidal – density wave 正弦磁密度external armature circuit 电枢外电路instantaneous electricpower 瞬时电功率instantaneous mechanical power 瞬时机械功率effects of saturation 饱和效应reluctance 磁阻power amplifier 功率放大器compound generator 复励发电机rheostat 变阻器self – excitation process 自励过程commutation condition 换向状况cumulatively compounded motor 积复励电动机operating condition 运行状态equivalent T – circuit T型等值电路rotor(stator)winding 转子(定子绕组)winding loss 绕组(铜)损耗prime motor 原动机active component 有功分量reactive component 无功分量electromagnetic torque 电磁转矩第二篇:自动化专业英语1)the parameterization of the0controller0isC=X+MQ/Y-NQ。
自动化专业英语整套课件完整版电子教案最全ppt整本书课件全套教学教程(最新)

Lesson1 Working Drawings(工作图)
Assembly drawings may be divided into two types depending on the proposed use:
1 .General assembly where the main purpose is to identify the individual components and show their working relationship;
上一页
Lesson1 Working Drawings(工作图)
Working Drawings(I)
During the design process, an engineer records ideas by means of sketches and design drawings of prototypes and their development. Once satisfied with the degree of perfection, the sketches are handed over to the draftsman who "takes off" the detail and makes working drawings of the whole unit. ①
上一页 下一页 返回
Lesson1 Working Drawings(工作图)
New Words and Expressions 1. working drawings 工作图 2. sketch n.草图,简图 3. prototype ['prautataip] n.原型,样机 4. development [di'velapmant] n.发展,研制 5. perfection n.完成,完美 6. draftsman ['dra:ftsman] n.绘图员 7. detail [‘di:teil] n.零件;细节,详细;详图
《自动化双语》课件

执行机构
执行机构是自动化系统的输出部分, 负责将驱动装置的能量转换为机械运 动或动作。
执行机构的精度和稳定性对自动化系 统的性能有很大影响。
执行机构种类繁多,根据自动化系统 的需求选择合适的执行机构,如电动 推杆、气动手指等。
检测装置
检测装置是自动化系统的重要组 成部分,负责对系统的各个参数
进行检测和反馈。
在服务领域,自动化技术也得到了广泛应用,如物流、金融、医疗等,提高服务质 量和效率。
此外,自动化技术还应用于智能交通、智慧城市等领域,为人们的生活带来便利和 安全。
02
自动化系统的构成
控制装置
控制装置是自动化系统的核心, 负责接收输入信号,根据预设的 逻辑或算法处理信号,然后输出
控制信号。
控制装置通常由控制器和调节器 组成,控制器负责逻辑运算,调 节器负责调节控制信号的幅度和
总结词:实施方式
详细描述:在自动化课程中实施双语教学有多种方式,包括使用外文教材、外教授课、中英文混合教学等。其中,使用外文 教材可以让学生接触到原汁原味的自动化知识,提高外文阅读和表达能力;外教授课则可以让学生感受到不同的教学风格和 思维方式,提高跨文化交流能力;中英文混合教学则可以让学生在逐步适应的过程中提高语言水平。
详细描述
交通自动化系统包括智能交通信号控制、交通监控等,通过智能化控制和管理,可以实现交通信号的自动调整、 交通流量的实时监测等功能,提高交通运行效率、减少交通拥堵和事故风险。
04
自动化系统的未来发展
人工智能与自动化
人工智能技术
人工智能技术是自动化系统的重 要发展方向,包括机器学习、深 度学习、自然语言处理等技术, 能够提高自动化系统的智能化水
平,提高生产效率。
自动化与电子信息专业英语教程(英文版)(ppt 72页)
2.1 Interpreting a digital IC datasheet 2.2 Diodes and Transistors(Ⅰ) 2.3 Diodes and Transistors(II) 2.4 The Ideal of Op-amp(I) 2.5 The Ideal of Op-amp(II) 2.6 Boolean Algebra 2.7 Number System 2.8 Flip-Flops and Latches 2.9 Programmable logic Device
negative portion
负半周
full-wave bridge rectifier 全波桥式整流
transformers
变压器
in conjunction with
与…连接
bipolar junction
双极性
proportionality constant 比例常数
base
基极
collector
“in which” 引起 定语从句,修饰 “power supplies”
这是个典型主从复合句。
全句可译为“二极管的一个主要应用是 AC信号 整流,尤其是在某些需要将 AC 电转化为 DC 电的电源中。”
2.3 Diodes and Transistors(II)
2.3.2 Specialized English Words
本句结果较复杂,主句为“Saying that … beyond ” ,“Saying”为动名词作主语,它的宾 语为“that” 引导名词从句。 “means”为主语 “Saying …”的谓语动词,而“that its impedance…”为“means”的宾语从句,而这个从 句又有自己的结果状语“so that…” 。 全句可译为“我们说二极管在 以上导通的电流 无穷大实际上是指它的阻抗变得如此之小导致它 不再是电路中的限制因素。”
自动化专业英语教程翻译
PART 1 Electrical and Electronic Engineering BasicsUNIT 1 A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2 A The Operational Amplifier ———————————5B TransistorsUNIT 3 A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4 A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5 A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6 A AC Machines ———————————————19B Induction Motor DriveUNIT 7 A Electric Power System ————————————22B Power System AutomationPART 2 Control TheoryUNIT 1 A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2 A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3 A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4 A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine Drivers B System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
自动化专业英语P3U2教学课件
并行输入接口 术语“输入”和“输出”通常指CPU和CPU的输出。如图3-2A-1所示的一个简单接口的标准图。输入接口仅受处理器控制。无论何时处理器寻址输入口,外部数据总线上的数据被允许放到处理器数据总线上,并且当CPU把数据放到总线上时,这一数据是可用的。 在这种接口中,有一个三态缓冲器,它能迫使处理器总线与外部数据线有相同的二进制值。当在不允许状态时,缓冲器输出进入高阻“第三态”,它能从总线上有效地移开数据线,允许其他数据利用系统总线。
P3U2A Interfaces to External Signals and Devices 第三部分第二单元课文A 外部信号与设备的接口
A 外部信号与设备的接口
概述 系统总线上的信号以非常有序的顺序发生。每个信号以事件的特定顺序来启动并在一固定时间后或被另外时间的顺序而终止。在仅有存储器和微处理器的系统中,由微处理器直接启动总线事件。 独立的外部设备和无总线兼容的信号以及与系统总线信号无时态关系的信号都不能直接连到系统总线上。系统总线通信是通过输入/输出接口来完成的。输入/输出接口的主要作用是协调处理器与外部设备之间的数据传输,以及转换为处理器可识别形式的数据。接口的其他作用可提供电隔离、噪声抑制、临时数据存储或数据格式转换。 有几种类型的接口,例如并行输入/输出、数字-模拟转换、模拟-数字转换、实时时钟、直接存储器访问,都是常用的。这里,我们仅限于讨论并行I/O和A/D及D/A。
逐次逼近型A/D 应用在A/D转换器结构上有很广泛的技术。最普通的是逐次逼近型转换器。它具有适度速度和适度分辨率的优点。 它的作用:第一次将输入电压与设为满量程A/D参考电压一半的测试电压相比较。利用标准的D/A转换器来得到测试电压。如果第一次比较后,输入电压大于满量程的一半,那么设定最高有效输出位。如果输入电压小于满量程的一半,那么从测试电压中删掉满量程电压的一半,否则电压保持同一值。 下一次,四分之一的满量程参考电压加到测试电压上,将输入电压与测试电压再一次比较,如果输入电压超过测试电压,那么下一个最高有效位被设定,测试电压,第二位设为0,四分之一满量程参考电压被删除。 这一过程逐次以更小的加权二进制电压重复,直到测试完最低有效位。
自动化专业英语专业英语概述PPT课件

B:I majored in__________.
A: Tell me about the courses of your major in university.
B:I take more than 50 courses in university, including_____________________, and so on.
in which only the sign of the difference
between desired and actual temperatures
is used for control.
精品课件
5
1. 专业英语与普通英语
❖ The rotation of the earth on its own
Electrical automatic control ❖ 自动控制原理
Automatic control theory ❖ 现代控制原理
Modern control theory ❖ 微机原理
Principle of microcomputer ❖ 计算机控制技术
Computer control technique ❖ 过程控制系统
罩上。
精品课件
4
1.1 什么是专业英语
1. 专业英语与普通英语
(2) 外文科技文章在结构上也具有很多自身的特点, 如长句多,被动语态多,大量的名词化结构等, 这都给对原文的理解和翻译带来了基础英语中很 难解决的困难。
例: The heating system and the water
heater(热水器) in a house are system
使一个物体运动时,必须做功(词义引申)。
自动化专业英语教程(王宏文)第二版全文翻译
《自动化专业英语教程》—王宏文-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ———- ——- - —- —— 3B Three-phase CircuitsUNIT 2A The Operational Amplifier ——————- ————5B TransistorsUNIT 3A Logical Variables and Flip-flop ———- ——————8B Binary Number SystemUNIT 4A Power Semiconductor Devices - —————————11B Power Electronic ConvertersUNIT 5A Types of DC Motors ——- - - ———- - —- —15B Closed—loop Control of DC DriversUNIT 6A AC Machines ———- ———- —- - ————19B Induction Motor DriveUNIT 7A Electric Power System ———————- —- ——22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control —- —- ————- ———27B The Transfer Function and the Laplace Transformation ——- ——29 UNIT 2A Stability and the Time Response ——- - ——- - —30B Steady State—————- ————- ———-——31UNIT 3A The Root Locus - ——————- ————- 32B The Frequency Response Methods: Nyquist Diagrams ——- ——33 UNIT 4A The Frequency Response Methods:Bode Piots —- ———34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability,Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control,the Future of ControlUNIT 4 A Fundamentals of Single—chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network—induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成.如果网络不包含能源,如电池或发电机,那么就被称作无源网络.换句话说,如果存在一个或多个能源,那么组合的结果为有源网络.在研究电网络的特性时,我们感兴趣的是确定电路中的电压和电流.因为网络由无源电路元件组成,所以必须首先定义这些元件的电特性.就电阻来说,电压-电流的关系由欧姆定律给出,欧姆定律指出:电阻两端的电压等于电阻上流过的电流乘以电阻值。
01自动化英语翻译的标准ppt
科技英语翻译知识( 科技英语翻译知识(三) ——直译和意译 直译和意译
e.g. 2、Future robots will incorporate infrared and ultraviolet sensors for seeking in the dark, ultrasound for undersea work or radar useful for mobile robots in obstacle avoidance. 未来的机器人将通过红外线和紫外线探测器,在黑暗中辨 认物象,使用超声波在海底工作,或装上雷达使移动的机 器人躲避障碍物。
二、逻辑理解
e.g. 1、The importance of mathematics and materials science in 、 preparation of young mechanical engineers can not be too overemphasized.. . 对培养青年机械工程师来说, 对培养青年机械工程师来说,数学和材料科学的重要性怎么强 调也不算过份 2、In the world, a microelectronic revolution is taking place, 、 which is expected to surpass the Industrial Revolution in the depth, breadth and speed of cultural and technical changes it makes. 在世界上正兴起一场微电子技术革命, 在世界上正兴起一场微电子技术革命,它所引起的文化和技术 变革的深度、广度、速度将超过产业革命。 变革的深度、广度、速度将超过产业革命。
翻译的标准( 翻译的标准(translation norm )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
李亚普诺夫函数是正定的要求指的是对状态变量的所有非 零值V(x)大于零并且V(0)等于零。为了保证沿区域R 内出发的 所有轨迹V(x) 衰减到零,dV(x)/dt 必须小于零,即,是负定的。 如果 ≤0,它是负半定的,系统仅在李亚普诺夫意义上是 V (x ) ,系统是渐进稳定的。最后, 稳定的;如果沿着轨迹 V( x ) 0 V (x ) 如果 是不定的,则对系统的稳定性不说明任何问题,我们 必须试验各种V(x)函数直到证明系统是稳定或不稳定的。另外, 稳定系统能保证稳定区域的大小与选择的李亚普诺夫函数有关。
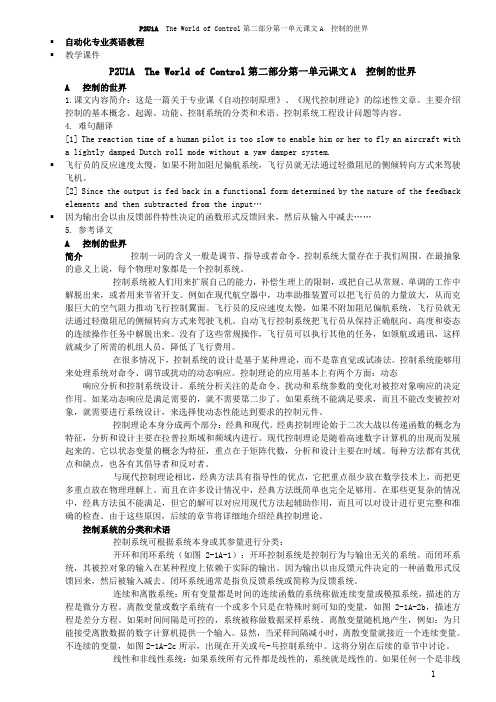
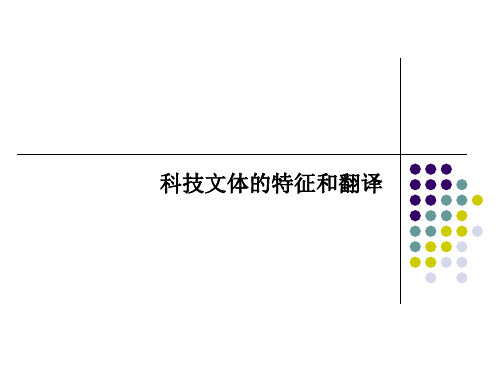
图 2-6A-1 一台装置的四个子系统
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
例如,如果子系统 B 的暂态响应对任何控制变量反应强 烈,从输出变量中得不到这些特性的信息。子系统C 中不受 欢迎的暂态响应会影响到输出,但控制变量对此无能为力。 通过适当地增加控制变量可使这台装置完全可控。然而,要 使这台装置完全可观,工作会更加困难,这里不作进一步讨 论。
稳定性
离开可控性和可观性的问题,我们需要讨论广义上连续 系统稳定性的概念和定义。定结构线性系统的稳定性比较简 单,因为稳定性仅取决于系统本身的特性而与系统的初始状 态、输入的幅值和类型无关。有一种有限的(唯一的)平衡 状态,如果在扰动的作用下,系统能返回到这个平衡状态, 我们称这个系统是稳定的。稳定性由特征根的位置确定(特 征方程的根),并且有许多种方法确定特征根的位置。
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
reveal v. 显现,揭示 comprise v. 包含 violently adv. 激烈地 straight-forward adj. 直截了当的,简单的 eigenvalue n. 特征根 autonomous adj.自治的,自激的 decouple v. 解耦,退耦 portrait n. 描述 conjunction n. 结合 identify v. 确认,识别,辨识 Jacobian matrix 雅戈比矩阵 positive definite 正定 incidentally adv. 偶然地
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
4. 难句翻译
[1] Since complete state controllability does not necessarily mean complete control of the output, and vice versa, complete output controllability is separately defined in the same manner. 因为状态完全能控性不一定意味着输出的完全可控,而且反 之亦然,所以输出完全能控性以类似的方式单独定义。 [2] Only local asymptotic stability with respect to the established equilibrium state can be guaranteed for linear analyses. 只有相对于(系统)建立的平衡状态的局域渐近稳定才能保 证线性分析(可以应用)。
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
在应用李亚普诺夫第二方法时,要研究的平衡状态转化 为状态空间的原点,因此自激系统可用如下方程:
x f (x )
(2-6A-1)
平衡状态为xeq=0。李亚普诺夫渐进稳定定理是这种直接 方法的本质。定理说的是:如果存在正定标量函数V(x)沿着 区域R 内的所有轨迹随时间衰减为零,则方程(2-6A-1)所表示 的系统在闭合区域R 内是渐进稳定的。如果区域R 包含所有 的状态空间,系统是全局稳定的;否则,系统在有限的区域R 内是局域稳定的。标量函数V(x)叫作李亚普诺夫函数。李亚 普诺夫函数在区域R 内一定是连续的,它的一阶偏导数也一 定是连续的。
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
乍看起来是全局稳定的,但实际上是局域稳定的,因为没有 任何一个系统是真正线性的。只有相对于(系统)建立的平 衡状态的局域渐近稳定才能保证线性分析(可以应用) 。 有三种基本方法来确定非线性自激系统的稳定性。一种 方法是用一个二阶系统来近似实际系统,在相平面上画出许 多条轨迹,检查画出的相位图以确定稳定和不稳定区域。描 述函数法与相平面结合可用来寻找和确定极限环。另一种方 法叫作李亚普诺夫第一或间接方法。这种方法首先用雅可比 矩阵线性化每一个平衡状态的非线性矢量方程,然后检查相 应的特征根以确定局域稳定性。上面提到的两种方法有时合 称为李亚普诺夫第一方法。 第三种方法叫作李亚普诺夫第二法或直接方法,之所以 这样叫是因为这种方法不需解微分方程。这种方法可用于所 有类型、任意阶数的微分方程,提供全局以及局域稳定性的 答案,因而得到广泛应用。
P2U6B
Optimum Control Systems 统
第二部分第六单元课文B
最优控制系
B
最优控制系统
1.课文内容简介: 主要介绍《现代控制理论》中最优控制的基本 概念、最优控制系统设计的五个基本步骤、最小 化的两种基本方法:动态编程法和变分逼近法等 内容。 2.温习《现代控制理论》中有关最优控制的内容。 3. 生词与短语
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
如图2-6A-1所示,一 台装置可分成四个子系统。 因为仅有第一个子系统A 是能观能控的,具有输入输出关系,所以它是唯一 一个可用传递函数或传递 函数矩阵表示的子系统。 相反,这台装置的传递函 数或传递函数矩阵并没有 反映子系统B 和 D 的动态 特性也没有对子系统C 和 D 的特性进行控制。
P2U6A Controllability, Observability, and Stab控性,可观性和稳定性
state-controllable adj. 状态可控(制)的 observable adj. 可观测的 dual adj. 双的,对偶的,孪生的 fundamental n. 基本原理 multivariable adj. 多变量的 guarantee v., n. 保证,担保 generalize v. 一般化,普及 trajectory n. 轨迹 Liapunov 李亚普诺夫 vortices n. vortex 的复数,旋转体(面) converge v. 集中,汇聚,收敛 asymptotically stable 渐近稳定 bound v. 限制 locally stable 局域稳定 globally stable 全局稳定
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
对变结构线性系统,特别是对非线性系统,稳定性不仅取 决于系统本身的特性,也取决于系统的初始状态、输入的类 型和幅值。此外,可能有不止一个平衡状态。要讨论这些系 统的稳定性,附加的定义和判据是必需的。我们将仅讨论自 激系统,因为对任意输入情况下的稳定性理论尚未建立。 如果离开初始状态的轨迹返回并保持在平衡状态周围规 定的区域内,则系统是稳定的。这种稳定性的广义定义通常 被认为是李亚普诺夫意义下的稳定性,允许极限环和涡旋环 的存在。如果在李亚普诺夫意义下稳定系统的轨迹最终收敛 于平衡状态,则系统是渐进稳定的。如果系统仅在初始状态 有限的状态空间内稳定,则系统是局域稳定的或叫小稳定。 如果系统在整个状态空间内对任意初始状态都稳定,则系统 是全局稳定的或叫大稳定。 我们喜欢我们的控制系统是渐进稳定的,最好是全局稳 定的;如果不是全局稳定的,最好渐进稳定的区域能包含任 何预期的扰动。古典控制理论的稳定性是渐进稳定的。
P2U6B
Optimum Control Systems 统
第二部分第六单元课文B
最优控制系
optimal control 最优控制 plant n. 机器,设备被控对象 constraint n. 约束条件 performance index 性能指标 deterministic adj. 确定的 lumped adj. 集中的 controllabillity n. 能控性 variational adj. 变化的,变种的 observability n. 能观性 admissible adj. 可采纳的,允许的 trajectories n. 轨迹,弹道 constant matrix 常数矩阵 multistage adj. 多级的,多步的 quasi adj. 近似的 linearization n. 线性化 suboptimal adj. 次优的
P2U6A Controllability, Observability, and Stability
第二部分第六单元课文A
可控性,可观性和稳定性
通过讨论一个有n个状态变量因而有n个暂态响应的广义n 阶装置就可解释这两个概念的意义。控制变量数用m 表示, 输出变量数用p 表示。在实际系统中我们期望m 和 p 小于n 并且越少越好。如果装置不是完全能控的,将会有暂态响应 (状态变量)不能由一个或多个控制变量用任何方式进行控 制;这些暂态响应由控制矢量进行衰减。如果装置不是完全 可观的,将有不确定的暂态响应;这些暂态响应由输出矢量 进行衰减。