曲柄滑块机构17页PPT
合集下载
曲柄滑块机构的结构
工作原理
当曲柄绕固定轴转动 时,通过连杆带动滑 块做往复直线运动。
通过改变曲柄的转速 和转向,可以控制滑 块的往复运动速度和 方向。
曲柄的长度和安装位 置可以改变滑块的行 程长度和方向。
应用领域
内燃机
曲柄滑块机构广泛应用于内燃机的活塞运动,通过曲柄的转动使活塞 进行往复运动,实现内燃机的吸气、压缩、做功和排气过程。
可能是由于润滑不良、部件磨损或异物卡住引起 的。应检查润滑状况,清洁机构并更换磨损部件。
异响
可能是由于部件松动、润滑不良或部件损坏引起 的。应检查紧固件和润滑状况,必要时更换损坏 部件。
精度下降
可能是由于部件磨损、松动或导轨弯曲引起的。 应检查并调整部件的精度,必要时更换磨损部件 或修正导轨。
谢谢观看
热处理工艺
总结词
热处理工艺能够显著提高材料的机械性能,是曲柄滑块机构优化的重要环节。
详细描述
热处理工艺包括淬火、回火、表面淬火和化学热处理等。淬火可以提高材料的硬度和强度,回火则可以改善材料 的韧性和降低内应力。表面淬火可以强化材料表面的硬度,提高耐磨性。化学热处理可以改变材料表面的化学成 分,提高耐腐蚀性和疲劳强度。
曲柄滑块机构的结构
目录
• 曲柄滑块机构简介 • 曲柄滑块机构类型 • 曲柄滑块机构的设计 • 曲柄滑块机构的优化 • 曲柄滑块机构的维护与保养
01
曲柄滑块机构简介
定义与特点
定义
曲柄滑块机构是一种将曲柄的回 转运动转化为滑块的往复直线运 动的机构。
特点
结构简单,工作可靠,能实现精 确的直线运动,且运动范围较大 ,因此在各种机械装置中得到广 泛应用。
总结词
当曲柄绕机架转动时,导杆仅作直线往复运动的曲柄滑块机构。
对心式曲柄滑块机构参考幻灯片

29
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
30
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
31
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
32
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
33
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
19
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
20
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
21
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
22
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
23
对心式曲柄滑块机构
偏心距e=0
左极限 位置
右极限 位置
对心式曲柄滑块机构
偏心距e=0 右极限 位置
1
对心式曲柄滑块机构
偏心距e=0 右极限 位置
2
对心式曲柄滑块机构
偏心距e=0 右极限 位置
3
对心式曲柄滑块机构
偏心距e=0 右极限 位置
4
对心式曲柄滑块机构
偏心距e=0 右极限 位置
5
对心式曲柄滑块机构
偏心距e=0 右极限 位置
6
对心式曲柄滑块机构
13
对心式曲柄滑块机构
偏心距e=0 右极限 位置
14
对心式曲柄滑块机构
偏心距e=0 右极限 位置
曲柄滑块机构的结构PPT课件

滑块与导轨结构
• 压力机上的滑块是一个箱形结构,它的上 部与连杆连接,下面开有“T”形槽或模 柄孔,用以安装模具的上模。
• 滑块在曲柄连杆的驱动下,沿机身导轨上 下往复运动,并直接承受上模传来的工艺 反力。
• 为了保证滑块底平面和工作台上平面的平行度,保 证滑块运动方向与工作台面的垂直度,滑块的导向 面必须与底平面垂直。(下平面的平面度,导向面的 平面度,下平面对导向面的垂直度,导向面对母线 的直线度)
• 压力机的机身按照结构形式不同分为开式机身和 闭式机身两大类。
• 机身的结构形式有:铸造式、焊接式、铸 焊组合式三大类。
• 常用材料有:HT200、球铁、和铸钢 ZG270-500,Q235、Q345等。
• 铸造或焊接后进行人工时效处理,消除内 应力。
• 不同形式的机身承载能力有差异,工艺用 途也不一样。
• 双柱可倾式机身便于从机身背部卸料,有 利于冲压工作的机械化与自动化。但随着 压力机速度的提高和气动顶推装置的普及, 可倾式机身的作用将逐渐变小。
• 升降台式机身可以在较大范围内改变压力 机的装模高度,运用工艺范围较广,但其 承载能力较小。
• 单柱固定台式机身承载能力相对较大,所 以,一般用于标称压力较大的压力机。
曲柄滑块机构的运动分析
S
R 1 cos 源自2sin 2V R sin sin 2
2
a 2 Rcos cos 2
• 由图可以看出,尽管曲柄作匀速转动,但 滑块在其行程中各点的运动速度是不相同 的。滑块在上止点(α=180°)和下止 点(α=0°)时,其运动速度为零,即v =0;
• 为了保证滑块的运动精度,滑块的导向面应尽量长, 因而滑块的高度要足够高,滑块高度与宽度的比值, 在闭式单点压力机上约为1.08~1.32,在 开式压力机上则高达1.7左右。
曲柄滑块机构PPT

“50deg/s”。此时在图中显示驱动器标志,如图所示
。
2.运行分析 进入“分析”对话框,接受系统默认的分析类型和 开始时间。设置运动的结束时间为“20”,帧频为“20”, 系统自动计算“帧数”和“最小间隔时间”,接受系统 默认的电动机。利用“运行”按钮可以查看齿轮的运行 情况。单击“运行”按钮,把运行结果存入结果集。
支架的设计
利用拉伸命令,选择FRONT作为草绘平面, 接受系统默认的草绘方向和参照平面,进入草绘 模式,绘制如图所示图形,完成后,在工作区下 方的“深度值”输入框中输入拉伸距离“30”,完 成特征创建。完成特征创建后,继续利用拉伸命 令,选择FRONT面为草绘平面,绘制如图所示 图形,完成后,在工作区下方的“深度值”输入 框中输入拉伸距离“12”,完成特征创建。
4.添加元件huakuai到组件 用同样的方法,将元件“huakuai”添加到组 件中,然后约束“滑动杆”,同样,完成添加, 如图所示。
运动分析及其仿真
1.添加驱动器
进入“应用程序\机构”。进入“伺服电动机”对话 框,接受系统默认的“从动实体”类型。选取“速度”规 范,接受当前轴的位置为零位置,接受系统默认的“模” 为“常数”,输入A值“50”,即传动轴的转速为
随着现代化工业的高速发展,产品的功能、 结构日趋复杂,新产品的更新换代周期不断缩短, 设计工作在产品的整个生命周期中占据了越来越 重要的地位。事实上,虽然开发中设开发费用中约有80%取决于设计过程,因而产品 的设计阶段己被视为提高整个生产效率的瓶颈, 对于生产系统的整个生产率起着举足轻重的作用。 因此,伴随着现代化工业的发展,计算机辅助设 计也得到了迅速的发展和普及。而参数化技术是 当前PRO/E技术需要的研究的领域之一。
3.结果回放 利用“回放”对话框中的按钮,从中可以将仿真结 果制作成动画进行播放。单击“”按钮,弹出“捕获” 对话框。单击“确定”按钮进行“mpeg”格式的动画制 作。单击“浏览”按钮,弹出“保存副本”对话框,可 以对制作的动画保存副本。单击“捕获”对话框中的 “确定”按钮,开始“mpeg”格式动画的制作,完成的 动画。
。
2.运行分析 进入“分析”对话框,接受系统默认的分析类型和 开始时间。设置运动的结束时间为“20”,帧频为“20”, 系统自动计算“帧数”和“最小间隔时间”,接受系统 默认的电动机。利用“运行”按钮可以查看齿轮的运行 情况。单击“运行”按钮,把运行结果存入结果集。
支架的设计
利用拉伸命令,选择FRONT作为草绘平面, 接受系统默认的草绘方向和参照平面,进入草绘 模式,绘制如图所示图形,完成后,在工作区下 方的“深度值”输入框中输入拉伸距离“30”,完 成特征创建。完成特征创建后,继续利用拉伸命 令,选择FRONT面为草绘平面,绘制如图所示 图形,完成后,在工作区下方的“深度值”输入 框中输入拉伸距离“12”,完成特征创建。
4.添加元件huakuai到组件 用同样的方法,将元件“huakuai”添加到组 件中,然后约束“滑动杆”,同样,完成添加, 如图所示。
运动分析及其仿真
1.添加驱动器
进入“应用程序\机构”。进入“伺服电动机”对话 框,接受系统默认的“从动实体”类型。选取“速度”规 范,接受当前轴的位置为零位置,接受系统默认的“模” 为“常数”,输入A值“50”,即传动轴的转速为
随着现代化工业的高速发展,产品的功能、 结构日趋复杂,新产品的更新换代周期不断缩短, 设计工作在产品的整个生命周期中占据了越来越 重要的地位。事实上,虽然开发中设开发费用中约有80%取决于设计过程,因而产品 的设计阶段己被视为提高整个生产效率的瓶颈, 对于生产系统的整个生产率起着举足轻重的作用。 因此,伴随着现代化工业的发展,计算机辅助设 计也得到了迅速的发展和普及。而参数化技术是 当前PRO/E技术需要的研究的领域之一。
3.结果回放 利用“回放”对话框中的按钮,从中可以将仿真结 果制作成动画进行播放。单击“”按钮,弹出“捕获” 对话框。单击“确定”按钮进行“mpeg”格式的动画制 作。单击“浏览”按钮,弹出“保存副本”对话框,可 以对制作的动画保存副本。单击“捕获”对话框中的 “确定”按钮,开始“mpeg”格式动画的制作,完成的 动画。
曲柄滑块机构(可控制的动态图)

版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
设计:潘存云
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
设计:潘存云
版权所有
作者:潘存云教授
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
设计:潘存云
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
设计:潘存云
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
设计:潘存云 设计:潘存云
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
设计:潘存云
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
设计:潘存云
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
版权所有
作者:潘存云教授
按ESC返回,
正转↓, 反转↑
连续动画:按键不松手, 点动:单击键
版权所有Βιβλιοθήκη 作者:潘存云教授按ESC返回,
曲柄滑块机构的运动规律ppt课件

l 3r 300(mm) 240(转/ min)
3
数学模型
取O点为坐标原点,OP方向为x轴正方向,P在x 轴上的坐标为x,那么可用x表示滑块的位移。
利用三角关系,立即得到
x r cos l2 r2 sin2
(1.1)
t dx dx d dx
(1.2)
dt d dt d
4
x r cos l2 r2 sin2
(1.1)
dx r sin r2 sin cos (1.3)
d
l2 r2 sin2
于是滑块的速度
v dx dx d dx dt d dt d
r sin 1
r cos
(1.4)
l2 r2 sin2
进而,可以得到滑块的加速度为
(1.4)进行近似。
v
r sin 1
r cos
l2
r2
sin2
(1.4)
仍利用公式(1.12)
(1 )a 1 a , 1 (1.12)
1
l 2 r 2 sin 2
1 l
1
r2 l2
sin 2
1
2
1 l
1
r2 2l 2
sin 2
把上式代入(1.4),就得到滑块速度的近似模型
2
12
、5
12
之间。
运用方程求根的数值方法,例如Newton法,对于加
速度的三种表达式,分别可以得出
1.2772 0.407时 , a 0
1.2773 0.407时 , a2 0 1.2862 0.409时 , a1 0
因此在求加速度(绝对值)的最值时,近似模型
也是十分有效的。
利用滑块位移的解析式(8.1)和近似式(8.13),
曲柄滑块机构的结构PPT课件
• 闭式机身有整体式和组合式两种。闭式机身承 载能力大,刚度较好。所以,从小型精密压力 机到超大型压力机大都采用这种形式。
• 组合式(见图b)机身是用拉紧螺栓将上梁、 立柱和底座拉紧,紧固成为一体的,加工和运 输比较方便,大中型压力机应用较广。
• 整体式机身(见图a),有时为了增强刚性也 有使用拉紧螺栓的。虽然整体式机身加工装配 工作量较小,但需要大型加工设备,运输也较 困难。因此,一般被限制在3000kN以下 的压力机上应用。
• 而滑块在行程中点(α=75°~90°和 α=270°~285°)时,其运动速度 为最大,近似取α=90°和α=270° 时的滑块速度作为滑块的最大速度
节点偏置机构主要 用于改善压力机的 受力状态和运动特 性,从而适应工艺 要求。如负偏置机 构,滑块有急回特 性,其工作行程速 度较小,回程速度 较大,有利于冷挤 压工艺,常在冷挤 压机中采用;正偏 置机构,滑块有急 进特性,常在平锻 机中采用。
• 双柱可倾式机身便于从机身背部卸料,有 利于冲压工作的机械化与自动化。但随着 压力机速度的提高和气动顶推装置的普及, 可倾式机身的作用将逐渐变小。
• 升降台式机身可以在较大范围内改变压力 机的装模高度,运用工艺范围较广,但其 承载能力较小。
• 单柱固定台式机身承载能力相对较大,所 以,一般用于标称压力较大的压力机。
曲柄滑块机构的运动分析
S
Байду номын сангаас
R 1
cos
2
sin 2
V R sin sin 2
2
a 2 Rcos cos 2
• 由图可以看出,尽管曲柄作匀速转动,但 滑块在其行程中各点的运动速度是不相同 的。滑块在上止点(α=180°)和下止 点(α=0°)时,其运动速度为零,即v =0;
曲柄连杆机构详细PPT幻灯片共34页

ቤተ መጻሕፍቲ ባይዱ 谢谢!
36、自己的鞋子,自己知道紧在哪里。——西班牙
37、我们唯一不会改正的缺点是软弱。——拉罗什福科
xiexie! 38、我这个人走得很慢,但是我从不后退。——亚伯拉罕·林肯
39、勿问成功的秘诀为何,且尽全力做你应该做的事吧。——美华纳
40、学而不思则罔,思而不学则殆。——孔子
曲柄连杆机构详细PPT幻灯 片
31、别人笑我太疯癫,我笑他人看不 穿。(名 言网) 32、我不想听失意者的哭泣,抱怨者 的牢骚 ,这是 羊群中 的瘟疫 ,我不 能被它 传染。 我要尽 量避免 绝望, 辛勤耕 耘,忍 受苦楚 。我一 试再试 ,争取 每天的 成功, 避免以 失败收 常在别 人停滞 不前时 ,我继 续拼搏 。
33、如果惧怕前面跌宕的山岩,生命 就永远 只能是 死水一 潭。 34、当你眼泪忍不住要流出来的时候 ,睁大 眼睛, 千万别 眨眼!你会看到 世界由 清晰变 模糊的 全过程 ,心会 在你泪 水落下 的那一 刻变得 清澈明 晰。盐 。注定 要融化 的,也 许是用 眼泪的 方式。
35、不要以为自己成功一次就可以了 ,也不 要以为 过去的 光荣可 以被永 远肯定 。
曲柄滑块机构PPT教案学习

第26页/共52页
则
Ft F cos
(3-6)
Fn F sin
式中Ft是使从动件转动的有效分力,对从动件产生有效回转力矩;而Fn是有害分力。 显然,当α愈大时,径向压力Fn愈大,而切向作用力Ft愈小。
第27页/共52页
如图3-15所示,在机构设计中,为了度量方便,习惯用压力角α的余角γ(即连杆 和从动摇杆之间所夹的锐角)来判断传力性能,γ称为传动角。因γ=90°-α,所以α越 小,γ越大, 则F的有效分力Fcosα亦越大,机构传力性能越好;反之,α越大,γ越 小,机构传力越困难,当γ小到一定程度时,会由于摩擦力的作用而发生自锁现象。 因此,传动角r的理想值应保持在接近最大值90°附近。为了保证机构传动性能良好 ,设计时通常应使最小传动角γmin≥40°,传递大功率时,γmin≥50°。
R2
d c
R3
d a
第43页/共52页
(3-10)
将它们代入式(3-8), 得到铰链四杆机构的位置方程
cos[( ) (0 0 )] R1 R2 cos( 0 ) R3 cos( 0 )
。如果取两连架杆的初始角φ0=ψ0=0,则式(3-11)成为
(3-11)
cos( ) R1 R2 cos R3 cos
将式(3-8)等号两边平方后相加,并且整理后得到
b2 a2 c2 d 2 2cd cos( 0 )
(3-9)
2ac cos[( ) (0 0 )] 2ad cos( 0 )
因为连架杆的运动取决于各个构件的相对长度, 设机构的相对杆件长度系数为
R1
a2
c2 d 2ac
2
b2
第37页/共52页
图3-17
第38页/共52页
则
Ft F cos
(3-6)
Fn F sin
式中Ft是使从动件转动的有效分力,对从动件产生有效回转力矩;而Fn是有害分力。 显然,当α愈大时,径向压力Fn愈大,而切向作用力Ft愈小。
第27页/共52页
如图3-15所示,在机构设计中,为了度量方便,习惯用压力角α的余角γ(即连杆 和从动摇杆之间所夹的锐角)来判断传力性能,γ称为传动角。因γ=90°-α,所以α越 小,γ越大, 则F的有效分力Fcosα亦越大,机构传力性能越好;反之,α越大,γ越 小,机构传力越困难,当γ小到一定程度时,会由于摩擦力的作用而发生自锁现象。 因此,传动角r的理想值应保持在接近最大值90°附近。为了保证机构传动性能良好 ,设计时通常应使最小传动角γmin≥40°,传递大功率时,γmin≥50°。
R2
d c
R3
d a
第43页/共52页
(3-10)
将它们代入式(3-8), 得到铰链四杆机构的位置方程
cos[( ) (0 0 )] R1 R2 cos( 0 ) R3 cos( 0 )
。如果取两连架杆的初始角φ0=ψ0=0,则式(3-11)成为
(3-11)
cos( ) R1 R2 cos R3 cos
将式(3-8)等号两边平方后相加,并且整理后得到
b2 a2 c2 d 2 2cd cos( 0 )
(3-9)
2ac cos[( ) (0 0 )] 2ad cos( 0 )
因为连架杆的运动取决于各个构件的相对长度, 设机构的相对杆件长度系数为
R1
a2
c2 d 2ac
2
b2
第37页/共52页
图3-17
第38页/共52页
含有一个移动副的四杆机构(课堂PPT)
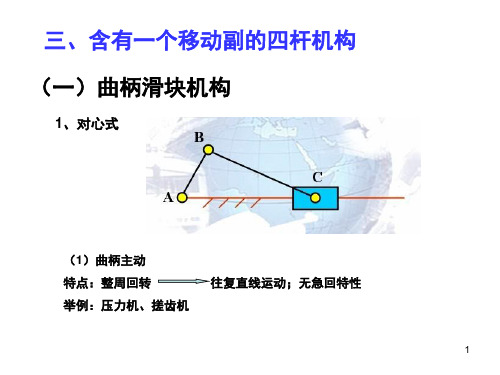
三、含有一个移动副的四杆机构 (一)曲柄滑块机构
1、对心式
(1)曲柄主动 特点:整周回转 举例:压力机、搓齿机
往复直线运动;无急回特性
1
压力机(冲压机)
2
(2)滑块主动
特点:往复直线运动 举例:内燃机
整周回转;有死点
3
2、偏置式
(1)曲柄主动 特点:整周回转 举例:自动送料机
往复直线运动;有急回特性
(2)滑块主动 特点:往复直线运动
整周回转;有死点
4
滚轮送料机
5
(二)摇杆滑块机构(固定滑块机构,定块机构)
1、特点:滑块固定不动,将AB杆的摆动 复直线运动
2、应用: 手摇唧筒(抽水机);
双作用式水泵
AC杆的往
6
(三)曲柄摇块机构(摇块机构)
1、特点:曲柄AB作整周回转 复摆动
2、应用:汽车吊车
摇块绕铰链转动中心作往
7
(四)导杆机构
1、转动导杆机构 特点:导杆AC绕A点 回转 应用:插床
2、摆动导杆机构 特点:导杆AC绕A点摆 动 应用:牛头刨床
8
1、对心式
(1)曲柄主动 特点:整周回转 举例:压力机、搓齿机
往复直线运动;无急回特性
1
压力机(冲压机)
2
(2)滑块主动
特点:往复直线运动 举例:内燃机
整周回转;有死点
3
2、偏置式
(1)曲柄主动 特点:整周回转 举例:自动送料机
往复直线运动;有急回特性
(2)滑块主动 特点:往复直线运动
整周回转;有死点
4
滚轮送料机
5
(二)摇杆滑块机构(固定滑块机构,定块机构)
1、特点:滑块固定不动,将AB杆的摆动 复直线运动
2、应用: 手摇唧筒(抽水机);
双作用式水泵
AC杆的往
6
(三)曲柄摇块机构(摇块机构)
1、特点:曲柄AB作整周回转 复摆动
2、应用:汽车吊车
摇块绕铰链转动中心作往
7
(四)导杆机构
1、转动导杆机构 特点:导杆AC绕A点 回转 应用:插床
2、摆动导杆机构 特点:导杆AC绕A点摆 动 应用:牛头刨床
8