阿比科.宾采尔机器人焊枪产品及周边产品介绍
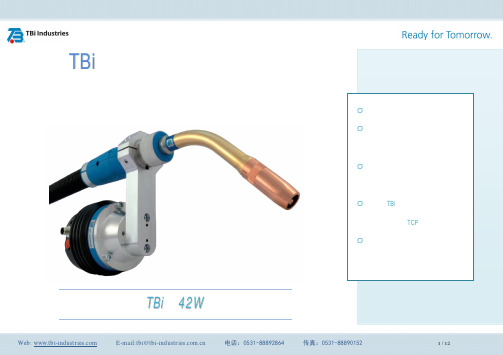
TBi机器人标配焊枪系统-中薄板焊接TBi 42W
清枪绞刀订货信息
C 绞刀外径
12.0
D 绞刀内径
7.0
12.5
9.0
13.0
9.0
14.0
9.0
15.0
11.0
16.0
11.0
17.0
11.0
17.0
13.0
18.0
11.0
19.0
11.0
订货编号 531P102010 531P102006 531P102007 531P102012 531P102015 531P102017 531P102020 531P102021 531P102016 531P102029
TBi 机器人标配焊枪系统
—适用于中薄板焊接
Ø 高刚性枪体,无需使用校枪器 Ø 枪体小巧、灵活,适合于复杂、
狭小空间焊接 Ø 枪颈可以快速更换,无需拆卸
支枪臂 Ø 使用 TBi 原厂耗材,正常工作
状态下提供 TCP 点一年质保 Ø 全新的喷嘴结构,确保与枪颈
紧密接触,使热量快速散失
TBi 42W
Web:
备选:带温控传感器的水箱
产品编码
产品名称
市场价格
200P101040 TBi Dusty 除尘机 ¥22500
产品编码
产品名称
260P×××××× TBi 除尘套件
市场价格 ¥2300
TBi Dusty 除尘机技术参数:
Ø 除尘量
340m3/h
Ø 电机功率 1.6kw
Ø 电压
1×230V / 50 Hz
l 喷硅油装置采用双喷嘴交叉喷射,雾化硅油更易到达喷嘴 的内表面,确保焊渣与喷嘴不发生粘连。
l 清枪和喷硅油装置在同一位置,机器人只要一个动作就可 完成喷硅油和清枪过程,完成全部动作仅需 6-7秒,相比 同类产品需要 12秒,大大节省清枪时间。
ARO Ergo Line系列焊钳中文说明书

T264 CN
1
ARO 1, avenue de Tours - 72500 CHATEAU-DU-LOIR - FRANCE - TEL. +33 (0)2 43 44 74 00
1. 说明
在所有型号的产品中,定臂与焊钳的其它部分绝缘,而活动臂和焊钳的其它部 分都接地。
在初级绕组方面,后罩起电气盒的作用,在该后罩上直接固定了一个辅助信号 分配器和电源插座。
XLA – XMA – XPA – XWA CLA – CMA – CWA 手动焊钳
技术说明书
T264 CN
更改说明
日期
09 / 00
文件编号
T264F
更改性质
创建
ARO 1, avenue de Tours - 72500 Château du Loir – 法国 电话:33 (0)2 43 44 74 00 – 电传:720 008 AROMACC – 传真:33 (0)2 43 44 74 01.
密封圈和滑块鼻子导轨的更换
60
5.10.
“C”型焊钳定臂的更换
61
5.11.
“X”型焊钳挂钩的更换
61
5.12.
“X”型焊钳轴心活动钳臂和铰链绝缘件的更换
62
5.13.
“X”型焊钳定臂的更换
62
5.14.
“X”型焊钳行程的调节
62
5.15.
作动筒的更换
63
5.16.
密封、作动筒和汽缸密封圈的更换
63
它应与一个电子控制箱一起工作,该控制箱中包括: - 含有切断阀、过滤和压力选择的流体(空气、水)控制盘, - 一个可编制的焊接程序, - 一个功率单位(闸晶管板), - 一个差动断路器。
全球最具影响力十大焊接设备巨头都有哪些?
全球最具影响力十大焊接设备巨头都有哪些?来源:真空技术网()数字化企业网作者:数字化企业网最早的现代焊接技术出现在19世纪末,先是弧焊和氧燃气焊,稍后出现了电阻焊。
20世纪早期,随着第一次和第二次世界大战开战,对军用器材廉价可靠的连接方法需求极大,故促进了焊接技术的发展。
今天,随着焊接机器人在工业应用中的广泛应用,研究人员仍在深入研究焊接的本质,继续开发新的焊接方法,以进一步提高焊接质量。
国内外专家认为:到2020年焊接技术仍将是制造业的重要加工手段,它是一种精确、可靠、低成本,并且是采用高技术连接材料的方法。
电焊机作为工业部门中的必备设备,被广泛应用于各行各业。
所以对于电焊机的选择来说,同样是非常受企业重视的一个环节,下面为大家介绍一下全球最具影响力十大焊接设备巨头。
瑞典伊萨(ESAB)1904年,奥斯卡·卡尔伯格(OscarKjellberg)发明了药皮焊条,随后建立了伊萨公司。
自成立之始,公司就从未间断对已有技术和材料进行改进。
与此同时,伊萨还发明了许多新方法来迎接技术革新所带来的挑战。
目前公司生产的焊材和设备应用到焊接和切割工艺的各个方面。
经过一百多年的持续钻研、发展和生产,伊萨已成为焊接切割和全球产品供应的领军企业,在专业技术和客户服务方面均无人能及。
伊萨公司在很多国家设有代表处,向世界各地提供最出色的焊材和设备。
在四个关键行业中,伊萨就是专业经验的代名词—手工焊接及切割设备、焊接自动化、焊接材料以及切割系统。
2005年7月,伊萨在中国正式注册成立伊萨焊接切割器材(上海)管理有限公司,并由此陆续开始在中国投资设厂。
金属加工在线编辑统计截止目前,伊萨已在中国张家港、烟台、无锡等地建立了4家工厂及1家工艺中心,其范围涉及焊机、焊材、自动化以及切割机等,重点发展行业包括能源、工程机械、运输、造船与海洋平台等。
作为世界焊接切割领域的领先者,伊萨正随着俄罗斯、中国及亚洲其他国家重工业的快速崛起,以其领先的技术优势和一流的服务充满自信地打造伊萨的第二个百年。
焊割配件系列

>>焊割配件系列一、电弧焊配件系列>>CO2焊枪1、OTC系列焊枪2、宾采尔系列焊枪200A 、500A15AK、24KD、36KD3、松下焊枪系列4、林肯焊枪系列500A、200A、350A 松下600A水冷林肯焊枪5、大阪焊枪系列6、百威焊枪7、南韩焊枪系列大阪焊枪百威焊枪350A 、500ACO2焊枪配件系列1、保护套15AK 24KD 25KD松下180A200A350A500A600A米勒保护套2、连接杆15AK24KD25KD36KD40KD350A501A松下200A 3、导电咀宾采尔15AK宾采尔24KD松下200、350、500松下350A松下500A 4、绝缘套350A宾采尔350A大阪180A米勒松下350A松下500A5、弯管松下200A弯松下200A直松下200A弯弯管6、前把外壳与开关前后前宾采尔开关松下7、送丝软管8、焊丝9、CO2气表卷直10、其他焊接辅助材料防堵剂防堵膏防飞溅剂防飞溅剂电极喷咀送丝机焊帽焊帽玻璃(黑,白)>>氩弧焊枪1、QQ亚焊枪2、SR氩焊枪3、水冷焊枪QQ150、QQ300A SR-17、SR-26WP-18氩焊枪配件 1、 枪头WP-18WP-17WP-18V WP-18F WP-26V WP-18WP-26WP-17WP-20WP-26FWP-26V2、 钨针夹WP-19WP-18WP-9D624 3、氩气表4、瓷嘴5、钨棒、钨针5、其他配件》》螺柱焊枪及配件。
TBi机器人焊枪使用说明

3、对于水冷焊枪,由于间断焊接导致铜锁母经常冷热交替,可能会导致螺纹松动,枪颈和电缆间出 现间隙而放电烧损,所以应每周定期检查并拧紧塑料锁母, 但注意不要用力过大导致滑丝。
种选择 高硬度铜合金,内孔五 边形设计,长使用寿
命,L=28mmM8
6
钢送丝软管ຫໍສະໝຸດ 324P2045XX20
焊钢用
PA送丝软管 7 碳特氟隆送丝管
特氟隆送丝管
328P2040XX
20
焊铝用,根据客户需要 选用
4
TBi 高性能机器人焊枪系统,已与 KUKA,MOTOMAN,ABB,FANUC,PANASONIC,REIS, OTC,神钢等机器人成功配套了多个汽车、重卡、工程机械、钢结构以及铝和不锈钢制品焊接项目。
一. TBi 机器人水冷焊枪系统
1. 80W 水冷枪颈技术参数
二. 机器人焊枪安装的注意事项
1
1、焊枪耗材的安装按照上图中所示,顺序安装。安装导电嘴座、气体分流器、导电嘴、喷嘴等螺纹 连接的部件时,应将相应的螺纹对正,然后轻柔顺畅的拧紧,确保得到良好的导电性能。
10、每次使用焊枪前后,请检查喷嘴、导电嘴、导电嘴座、气体分流器、绝缘垫片、送丝管、导丝管 等耗材是否正确安装及完好,有问题请及时更换。更换导电嘴时请用扳手固定住导电嘴座,以免导电 嘴座连同导电嘴一起卸下。这样可以延长焊枪使用寿命。只有当导电嘴的螺纹磨平后再更换下导电嘴 座。
GF Piping Systems 2016 塑料焊接设备和工具产品手册说明书

d-d
code weight
(mm)
(kg)
20 ‐ 63 790131005 50,000
卡具片
• 每种尺寸的卡具片都不同。 用于夹持和定位管材部件。
d
code weight Pieces
(mm)
(kg)
20 790131038 0,090
1
25 790131039 0,090
1
32 790131040 0,052
1
790133027 0,400
1
790133028 0,691
1
790133029 0,644
1
790133030 0,500
1
790133031 0,600
1
790133032 0,600
1
790133463 0,560
1
790133033 0,700
1
790133034 0,270
型号:
• 整装的红外焊接设备,可焊接SYGEF Standard、SYGEF Plus、PROGEF
Standard、PROGEF Natural、PROGEF Plus、 ecoFIT,尺寸范围为d 63-225 mm,2个USB 接口,带图标的单色显示器,支持12种语言。
• 主机(1 个) • 加热器总成(1 件) • 切削器总成(1 件) • 可移动卡具平台(1 个) • 卡具片d 63-225 mm (每种尺寸8片) • PE管帽 d 63-225 mm (每种尺寸4个) • 运输锁定件(1 个) • 梅花/开口扳手 13 mm (1 把) • 清洁刷 (1 把) • 连接电缆400 V - 230 V (1 个) • 手柄球(1 个) • 手册(1 本) • 单相 AC (50/60 Hz) 230 V L/N/PE 或 三相 AC (50/60 Hz) 400 V/230 V L1/L2/L3/N/PE • 工作台,高洁净(1 张) • 管材定位器(1 件) • 六角扳手 5 mm (1 把) • 六角扳手 6 mm (1 把)
奥太Pulse MIG R系列说明书_1412

binzel-abicor 型号 wh whpp zh 焊枪系统 使用说明书
T E C H N O L O G Y F O R T H E W E L D E R ´ S W O R L D . ZH使用说明WH / WHPPZH 焊枪系统WH / WHPPZH原厂操作手册中文翻译版© 厂家保留因印刷错误、不准确信息或产品改良而随时修订此操作手册的权利,恕不提前通知。
新版本操作手册也会涉及到此类更改。
在此操作手册中涉及的商标及注册商标归持有人/生产厂家所有。
如想获悉ABICOR BINZEL各国代理或合作伙伴的联系信息,请访问我们公司的主页1识别鉴定ZH-3 1.1标记ZH-3 2安全性ZH-3 2.1按规定使用ZH-3 2.2运营者的义务ZH-3 2.3个人防护装备 (PPE)ZH-3 2.4警告提示分类ZH-4 2.5操作专用警告标签ZH-4 2.6紧急情况的说明ZH-4 3产品说明ZH-5 3.1技术数据ZH-5 3.2缩写ZH-8 3.3铭牌ZH-8 3.4使用的符号和图标ZH-9 4供货范围ZH-9 4.1运输ZH-9 4.2存储ZH-10 5功能介绍ZH-10 5.1枪颈ZH-10 5.2WH 和 WHPP的替换件ZH-10 6启用ZH-11 6.1ROBO WH 241D枪颈,WH 455D装配ZH-11 6.2装配枪颈ROBO WH 650ZH-126.3装配焊枪颈ROBO WH 652D (TS)/WH W500ZH-12 6.4装配线缆组件ZH-12 6.5焊枪系统和机器人组装ZH-13 6.6机器接通安装ZH-13 6.7接通冷却剂ZH-13 6.8接通控制线。
ZH-14 6.9接通推拉功能ZH-15 6.10设置保护气量多少ZH-16 6.11导入焊丝ZH-16 6.12手动更换枪颈ZH-17 6.13自动更换枪颈ZH-17 7操作ZH-17 7.1焊接过程ZH-18 8终止工作状态。
ZH-18 9维护和清洗ZH-18 9.1送丝软管ZH-19 9.2送丝管ZH-19 9.3塑料芯ZH-20 9.4枪颈ZH-21 9.5替换部分ZH-21 10干扰和排除ZH-21 11拆散ZH-22 12废物处理ZH-23 12.1原料ZH-23 12.2辅助材料ZH-23 12.3包装ZH-23ZH - 2WH / WHPP1识别鉴定1识别鉴定WH/WHPP 焊枪系统焊枪用于工业和手工业领域内的惰性保护气体焊接(MIG),或者活性气体焊接(MAG) 。
Minarc150

1.前言 (2)1.1 简介 (2)1.2 产品介绍 (2)1.3 操作安全 (2)2. 安装 (3)2.1 打开包装 (3)2.2 机器的放置 (3)2.3 机器系列号码 (3)2.4 主要部件 (3)2.5 接入供电回路 (4)2.6 焊条与设备 (4)3. 操作 (4)3.1 焊接工艺 (4)3.1.1 手工电弧焊 (4)3.1.2 TIG焊 (4)3.2 操作功能 (4)3.3 焊接方法选择 (5)3.3.1 手工电弧焊 (5)3.3.2 直流钨极氩弧焊 (5)3.4 焊接注意事项 (6)3.4.1 接地 (6)3.4.2 焊接 (6)3.5 存放 (6)4 维护 (6)4.1 日常维护 (6)4.2 故障排除 (7)5 订货号 (7)6 技术数据 (8)1.前言1.1 简介十分感谢您购买了KEMPPI产品!正确的安装和使用Kemppi产品可延长机器的使用寿命,减少设备的维护次数。
手册内容包括设备安全操作说明,维护信息,技术数据等,第一次安装,使用及维护设备前请先仔细阅读此操作使用手册。
对于日后Kemppi的有关信息请联络我们或请向离您最近的Kemppi经销商咨询。
KEMPPI享有更改本手册技术说明和版面设计的权利,而无须事先声明。
请仔细阅读本手册有关警告说明的文字,并请在使用过程中严格遵守本手册的安全说明!1.2 产品介绍肯比 Minarc 系列是一款手工金属电弧焊机,体积小,方便携带。
适合于工厂、工地、修理行业等场合。
本焊机使用单相交流电,有两种电压制式:230V(Minarc150)和110V(Minarc151)。
Minarc焊机能适应较宽的输入电压波动。
适合工地上的发电机供电,可使用较长的供电电缆。
本机的设计采用逆变技术,由IGBT晶体管做为功率调整器件。
随机附件有焊接电缆和接地电缆,包括焊钳、地线夹、插头等。
Minarc还可以用于TIG焊,但只能刮擦起弧。
如需购置TIG焊的附加设备请在第五章查阅订货号。
德国ERBE讲解
德国ERBE德国爱尔博电子医疗仪器公司(ERBE Elektromedizin GmbH)是一家创建于1847年,至今已具有150余年历史的著名医疗仪器生产厂家。
公司总部位于德国南部风景如画的大学城蒂宾根(Tuebingen)。
公司于1923年生产了世界上第一台电刀。
经过了一个半世纪的不断追求,今天其主导产品高频电刀和氩气刀因应用了先进的微处理器和传感器技术而闻名于世,受到了全世界广大用户的赞誉。
最近,爱尔博公司又在全球范围内隆重推出了全新的、具有划时代意义的ERBE VIO 电外科工作站和ERBE HELIX螺旋水刀。
除此之外,爱尔博公司还生产和销售冷冻治疗系列,手术室、ICU吊臂系列,物理治疗系列及眼科系列专用设备。
ICC50型高频电刀ERBOTOM ICC 50 的最大输出为50瓦,适用于小型专科手术。
能提供两种单极切割效果和三种电凝模式(其中之一是双极电凝)。
高度的安全性不但由中性电极、启动时间监控、输出错误监测等功能保证,而且也由先进的自检和其他测试程序保证。
功能完善,使用简单,维护容易。
电切单极电切电切控制系统- 实现自动、完美的电切效果电凝单极,双极电凝(BIPOLAR COAG)精细且无炭化现象的柔和电凝强力电凝- 用于快速电凝安全,精细的双极电凝模式操作输出功率的预置值可以满足大多数外科手术的需要安全更为安全的双极电凝先进的自检程序ICC 50 ERBOTOM ICC 50 适用于小型专科手术。
皮肤科耳鼻喉科血管外科口腔科其他专科附件ERBE 附件是在各专科用户广泛的临床经验基础上开发的,各类器械都能最佳地适应ERBE高频外科设备。
ERBE专用附件说明书为您提供各类器械更详细的信息。
所有连接电缆都符合IEC 601标准,第2-2节NO.101.3条规定,工作中可选用ICC标准型插头或ICC国际型插头。
ICC80型高频电刀ERBOTOM ICC 80 的最大输出为80瓦,适用于小型专科手术。
林肯电子Vantage 300多功能焊接机说明书

© Lincoln Global, Inc. All Rights Reserved.300ENGINE DRIVEN WELDERSProcessesStick, TIG, MIG, Flux-Cored, Gouging Product Number K2409-3See back for complete specsShown: K2409-3PH: +1.216-481-8100 • Output Range See Back PageRated Output Current/Voltage/Duty Cycle 300A/32V/100% 350A/28V/100%Number of Cylinders 4HP @ Speed (RPM) 22 HP @ 1800 RPM Weight/Dimensions (H x W x D) 1035 lbs. (469 kg) 35.9 x 25.3 x 60.0 in. (913 x 642 x 1524 mm) 44.3 (1124 mm) To Top ofExhaust Tubethe U.S.A. and Canada.Chopper Technology® delivers extremely fast response for tighter output control.VRD™ portion of nameplatewith green light on.Vantage ® 300 | [ 3 ]Single-side engine access with lockable sliding door.Fuel, oil pressure and engine temperature gauges help you monitor performance.Latched and lockable radiator cap cover.Convenient battery tray below control panel.Handy oil drain valve and tube makes oil changes neat.Output automatically switches toremote mode when remote device is connected. For the CC-stick,downhill pipe and Touch Start TIG ®modes, the machine output dial becomes a maximum current limit for more fine tuning with the remote control dial or Amptrol ™.1. Glow Plug Button2. Weld Mode Selector Switch3. Run/Stop Switch4. Hour Meter5. Start Pushbutton6. Engine Idler Switch7. Fuel Level, Engine Temperature and Oil Pressure Gauges 8. Engine Protection Light 9. Engine Battery Charging Light 10. 120 VAC Circuit Breakers 11. 120 VAC Receptacles12. Covered Weld Output Terminals + and - 13. Sealed GFCI Modules 14. Ground Stud15. 120/240 VAC Full-KVA 1-Phase Receptacle 16. 240 VAC Full-KVA 3-Phase Receptacle 17. Full-KVA 1- & 3-Phase Circuit Breaker 18. 14-Pin Wire Feeder Connector 19. 6-Pin Remote Control Connector20. Arc Force & Inductance/Pinch Control Dial 21. Welding Terminals Control Switch 22. Wire Feeder Voltmeter Polarity Switch 23. Digital Amps and Volts Output Meters 24. VRD ™ Indicator Lights 25. Output Control DialNote: Control panel door not shown.211232221201917161514181********• Simple Controls – Keeps training time to a minimum. The flip-down control panel door keeps less frequently used dials out of the way. Scratch-resistant Lexan ® nameplate.• Digital meters for amps and volts output make it easy to precisely set your procedures.• Large 20 gallon (76 liter) fuel tank provides run time for an extended day – over 16 hours of welding at 300A/32V/100% duty cycle output, or 49 hours at high idle.• The Kubota ® V1505 engine is a 22 horsepower, water-cooled, 4cylinder diesel engine with an automatic idler for greater fuel economy and reduced noise. • Engine hour meter makes it easy to schedule maintenance.• LN-25 Ironworker ™ arcoss-the-arc wire feeder is a recommended option.• 14-pin connector for Lincoln Electric wire feeders with control cables: LF-72, LF-74, LN-8, LN-15, LN-25 PRO Dual Power, and LN-742. Also compatible with Magnum ® SG spool gun system.• Two Vantage ® 300 units can be paralleled in the CC-stick mode to increase output.• Kilowatts available for Multi-Weld ® 350 use: 4.8 KW @ 60 VDC, 7.0 KW @ 58 VDC.KEY CONTROLS[ 4 ] | Vantage ® 300• Simple wire harnessing keeps connections to a minimum for greater reliability. Lead and harness strain reliefs on all control connections help ensure trouble-free performance.• Engine protection system includes automatic shutdown for low oil pressure or high engine temperature.• Indicator light turns on for low oil pressure or high engine temperature. A second indicator light turns on if the engine battery charging system malfunctions.• Circuit breaker protection on the battery ignition system provides added component protection.• Environmental friendly engine! The engine has a closed breathersystem to keep the engine compartment and ground clean. This system eliminates oil mist from collecting inside the engine compartment, especially on surfaces that would lower engine cooling efficiency.• Self-bleeding engine simplifies startup if your fuel tank runs dry.• Kubota ® engine camshaft is gear-driven. No timing belt maintenance.• Printed circuit boards are environmentally-shielded using Lincoln Electric’s engineered potting and protective frame trays.• Dependability and long life are aided by all-copper windings in rotor and stator with high quality insulation.• Standard stainless steel roof, side panels and engine-access doordeliver added protection, durability and corrosion-resistance. Eliminates the need to paint or replace rusting panels.• Manufactured under a quality system certified to ISO 9001 requirements and ISO 14001 environmental standards.• Canadian Standards Association (CSA) certified.• Three-year Lincoln Electric warranty (parts and labor) on welder(engine is warranted separately by the manufacturer).(1)High Altitude: For maximum rating, derate the output 2.5% to 3.5% for every 1,000 ft. (300 m). High Temperature: For maximum rating, derate 2 volts for every 18°F (10°C) above 104°F (40°C).(2) DC Constant Voltage capability provides convenience and added safety when welding in electrically hazardous conditions.(3) When welding, available AC generator power will be reduced. Output voltage is within +/- 10% at all loads up to rated capacity.(4) 120V will operate either 60 Hz or 50/60 Hz power tools, lights, etc.(5) Circuits cannot be wired in parallel to operate the same device.(6)Kubota ® warranty is 2 years/2,000 hours for machines shipped within the U.S., Canada, Pacific Ocean region and Western Europe. Warranty is 1 year/1,000 hours for Central and South America, Asia, Africa and Middle East.Vantage ® 300 |[ 5 ]One-Pak ® Welding PackageOrder a Lincoln Electric One-Pak ® and get everything you need to complete a welding package - all with one order number.(Package requires assembly.)Unassembled Package Contains:• Vantage ® 300• Medium Welder Trailer (K2636-1)• Duo-Hitch ™ 2 in. (51 mm) Ball/Lunette Eye Hitch (included)• Fender and Light Kit (K2639-1)• Cable Rack (K2640-1)• Cable Connectors - two (K2487-1)• Electrode Cable 2/0, two 50 ft. (15.3 m) lengths (K2485-2)• Electrode Cable 2/0, 10 ft. (3 m) (K2483-2)• Work Cable 2/0, 50 ft. (15.3 m) (K2484-2)• 300A Electrode Holder (K909-7)• 300A Work Clamp (K910-1)Order:K2452-3 Vantage ® 300 Kubota ® One-Pak ® PackageReady-Pak ® Welding PackageOrder a Lincoln Electric Ready-Pak ® Package and get an assembled welding pletely Assembled Package Contains:• Vantage ® 300• Medium Welder Trailer (K2636-1)• Duo-Hitch ™ 2 in. (51 mm) Ball/Lunette Eye Hitch (included)• Fender and Light Kit (K2639-1)• Cable Rack (K2640-1)• Cable Connectors - two (K2487-1)• Electrode Cable 2/0, two 50 ft. (15.3 m) lengths (K2485-2)• Electrode Cable 2/0, 10 ft. (3 m) (K2483-2)• Work Cable 2/0, 50 ft. (15.3 m) (K2484-2)• 300A Electrode Holder (K909-7)• 300A Work Clamp (K910-1)Order:K2453-3 Vantage ® 300 Kubota ® Ready-Pak ®PackageK2636-1 Medium Welder TrailerVantage ® 300Duo-Hitch ™ 2 in. (51 mm) Ball/Lunette Eye Hitch(included)K2640-1 Cable RackCompletely Assembled Ready-Pak ®Pkg.[ 6 ] | Vantage ® 300GENERAL OPTIONSPower Plug Kit (20A)Provides four 120V plugs rated at 20 amps each, and one dual voltage, full KVA (1-Phase) plug rated at 120/240V, 50 amps. 120V plug may not be compatible with common household receptacles. Order K802NFull-KVA Power Plug (1-Phase) One dual voltage plug rated at120/240V, 50 amps. NEMA 14-50P. Order T12153-9Full-KVA Power Plug (3-Phase) One plug rated at 240V, 50 amps. NEMA 15-50P. Order T12153-10Full - KVA Adapter Kit (1-Phase) Provides convenient connection of Lincoln Electric equipment having a 240V AC 1-phase plug (NEMA 6-50P) to the full-KVA receptacle on Lincoln engine-driven welders. Order K1816-1Medium Welder TrailerFor heavy-duty road, off-road, plant and yard use. Includes pivoting jack stand, safety chains, and 13 in. (330 mm) wheels. Stiff .120 in. (3.0 mm) welded rectangular steel tube frame construction is phosphate etched and powder coat painted for superior rust and corrosion resistance. Low sway suspension gives outstanding stability with manageable tongue weight. Wheel bearings are packed with high viscosity, high pressure, low washout Lubriplate ® grease. Includes a Duo-Hitch ™ – a 2 in. (51 mm) Ball/Lunette Eyecombination hitch. Overall width 60 in. (1524 mm). Overall length 124 in. (3150 mm). Order:K2636-1 TrailerK2639-1 Fender & Light Kit K2640-1 Cable RackFour-Wheeled Steerable Yard TrailerFor off-road, plant and yard use. Includes an automatically engaging drawbar lock when the drawbar is raised to the verticle position. 13 in. (330 mm) wheels. Wheel bearings are packed with high viscosity, high pressure, low washout Lubriplate ® grease. Stiff 3/16 in. (4.8 mm) welded rectangular steel frame construction is phosphate etched and powder-coat painted for superior rust and corrosion resistance. Also includes aDuo-Hitch ™ – a 2 in. (51 mm) Ball/Lunette Eye combination hitch. Overall width 55 in. (1397 mm). Overall length 124 in. (3150 mm). Order K 2641-2Spark Arrestor KitMounts to muffler exhaust tube. Virtually eliminates spark emissions. Order K1898-1Digital Weld Meters Kit Easy-to read digital meters for volts and amps. Easy to install. (For K2409-1 and K2499-1). Order K2467-1Polarity/Multi-Process Switch For easy polarity switching. Example: DC-stick root pass on pipe & DC+ stick for hot, fill and cap passes. Also for an easy process change. Example: DC+ stick root pass on pipe and DC- Innershield ® self-shielded flux-cored wire for hot, fill and cap passes. 6 & 14-pin remote connections can be made to this unit. For all Lincoln ElectricChopper Technology ® engine-driven welders. Mounts on roof with K2663-1 Docking Kit. Order K2642-1Docking KitSecures the K2642-1 Polarity/Multi-Process Switch to the engine-driven welder roof. Release latch permits removal of K2642-1 Polarity/Multi-Process Switch. Made from stainless steel for rust-free operation. For all Lincoln Electric ChopperTechnology ® engine-driven welders.Order K2663-1STICK OPTIONSAccessory KitIncludes 35 ft. (10.7 m) 2/0 electrode cable with lug, 30 ft. (9.1 m) 2/0 work cable with lugs, headshield, filter plate, cover plate, work clamp and electrode holder. 400 amp capacity. Order K704Remote Output ControlConsists of a control box with choice of two cable lengths. Permits remote adjustment of output.Order K857 for 25 ft. (7.6 m) K857-1 for 100 ft. (30.5 m)Remote Output Control with 120VAC ReceptaclesRemote weld output control box with two 120V AC receptacles having GFCI (Ground Fault Circuit Interrupter) protection. One cord for both remote and power. 100 ft. (30.5 m) length. Permits remote adjustment of weld output andpower for tools (such as a grinder) at the work. 20 amp capacity. Order K2627-2TIG OPTIONSPro-Torch ™ PTA-26V TIG Torch Air-cooled 200 amp torch (2 piece) equipped with valve for gas flow control. 25 ft. (7.6 m) length. Order K1783-9Magnum ® Parts Kit for PTA-26V TIG TorchMagnum ® Parts Kit provides all the torch accessories you need to start welding. Parts Kit provides collets, collet bodies, a back cap, alumina nozzles and tungstens in a variety of sizes, all packaged in an easy to carry reclosable sack. Order KP509Foot Amptrol ™Provides 25 ft. (7.6 m) of remote output control for TIG welding. (6-pin plug connection). Order K870Hand Amptrol ™Provides 25 ft. (7.6 m) of remote current control for TIG welding. 6-pin plug connection). Velcro straps secure torch. Order K963-3(one size fits all Pro-Torch ™ TIG Torches)Square Wave ™ TIG 175For AC TIG Welding with square wave performance, use the AC generator of the engine-driven welder to supply the power (full rated output may not be available). Easy setup. Includes torch, foot Amptrol ™ and gas regulator and hose. Requires the K1816-1 Full KVA Adapter Kit. Order K1478-5Invertec ® V205-T AC/DC One-Pak ® Pkg.For AC TIG welding with square wave performance, use the AC generator of the engine-driven welder to supply the power. Easy setup. Includes torch, parts kit, regulator and hose kit, Twist Mate ™ torch adapter, work cable with Twist Mate ™ end and Foot Amptrol ™. Requires K1816-1 Full-KVA Adapter Kit.Order K2350-2WIRE FEEDER OPTIONSLN-25 Ironworker™ Wire Feeder P ortable CV unit for flux-cored and MIG welding with MAXTRAC® wiredrive system. Includes digital metersfor wire feed speed/amperageand voltage, gas solenoid, internalcontactor and 5/64 in. (2.0 mm)drive roll kit for cored wire. Has 83%reduced wire feed speed capabilityfor 6 o’clock pipe welding withInnershield® wire.Order K2614-9K126 PRO Innershield® GunFor self-shielded wire with 15 ft.(4.5 m) cable. For .062-5/64 in.(1.6-2.0 mm) wire. IncludesK466-10 Connector Kit.Order K126-12Drive Roll and Guide Tube KitFor .068-.072 in. (1.7-1.8 mm)cored or solid steel wire.Order KP1697-068Magnum® PRO 350 Ready-Pak®15 ft., .035-5/64 in.Magnum® PRO MI G/flux-coredwelding guns are rated 100%duty cycle. The guns are designedfor high amperage, high dutycycle applications in extremeenvironments where heat-resistanceand fast serviceability are key.Order K2652-2-10-45Drive Roll and Guide Tube KitFor .035 in. and .045 in.(0.9-1.1 mm) solid steel wire.Order KP1696-1Magnum® SG Spool GunHand held semiautomatic wirefeeder. Requires SG Control Moduleand Input Cable.Order K487-25SG Control ModuleThe interface between the powersource and the spool gun. Providescontrol of the wire speed and gasflow. For use with a spool gun.Order K488Input Cable(For SG Control Module)For Lincoln Electric engine powersources with 14-pin MS-typeconnection, separate 115V NEMAreceptacles and output studconnections.Order K691-10PLASMA CUTTINGTomahawk® 1000Cuts metal using the AC generatorpower from the engine-drivenwelder. Requires the T12153-9Full-KVA Power Plug (1-Phase).Order K2808-1Vantage® 300 | [ 7 ]C U S T O M E R A S S I S T A N C E P O L I C YThe business of The Lincoln Electric Company is manufacturing and selling high quality welding equipment, consumables, and cutting equipment. Our challenge is to meet the needs of our customers and to exceed their expectations. On occasion, purchasers may ask Lincoln Electric for information or advice about their use of our products. Our employees respond to inquiries to the best of their ability based on information provided to them by the customers and the knowledge they may have concerning the application. Our employees, however, are not in a position to verify the information provided or to evaluate the engineering requirements for the particular weldment. Accordingly, Lincoln Electric does not warrant or guarantee or assume any liability with respect to such information or advice. Moreover, the provision of such information or advice does not create, expand, or alter any warranty on our products. Any express or implied warranty that might arise from the information or advice, including any implied warranty of merchantability or any warranty of fitness for any customers’ particular purpose is specifically disclaimed.Lincoln Electric is a responsive manufacturer, but the selection and use of specific products sold by Lincoln Electric is solely within the control of, and remains the sole responsibility of the customer. Many variables beyond the control of Lincoln Electric affect the results obtained in applying these types of fabrication methods and service requirements.Subject to Change – This information is accurate to the best of our knowledge at the time of printing. Please refer to for any updated information.For best welding results with Lincoln Electric equipment,always use Lincoln Electric consumables. Visit for more details.。
机器人焊枪的基本构成及功能介绍
机器人焊枪的基本构成及功能介绍英文回答:Introduction:A robot welding gun is a key component of a robotic welding system. It is designed to perform the welding process automatically and efficiently. The welding gun is responsible for delivering the welding wire and theshielding gas, as well as providing the necessary heat and electrical current for the welding process. In this article, we will discuss the basic components and functions of arobot welding gun.Components of a Robot Welding Gun:1. Torch Body: The torch body is the main structure of the welding gun, which holds all the other components together. It is usually made of heat-resistant materials such as copper or aluminum. The torch body also includes aninsulating handle for the operator to hold.2. Contact Tip: The contact tip is the part of the welding gun that comes into direct contact with the workpiece. It is responsible for delivering the weldingwire to the weld joint. The contact tip is usually made of copper or a copper alloy to withstand high heat andelectrical current.3. Gas Nozzle: The gas nozzle is attached to the front end of the welding gun and directs the flow of shieldinggas to protect the weld pool from atmospheric contamination. It is made of heat-resistant materials and is designed to provide optimal gas coverage for the welding process.4. Wire Drive Assembly: The wire drive assembly is responsible for feeding the welding wire from the wirespool to the contact tip. It consists of a set of driverolls that grip the wire and push it through the gun. The wire drive assembly is controlled by a motor and can be adjusted to control the wire feed speed.5. Power Cable: The power cable connects the welding gun to the power source, delivering the necessaryelectrical current for the welding process. It is designed to handle high currents and is insulated to prevent electrical shocks.6. Coolant System: Some robot welding guns are equipped with a coolant system to dissipate heat generated during the welding process. The coolant system circulates a cooling fluid through the torch body to prevent overheating and prolong the life of the gun.Functions of a Robot Welding Gun:1. Wire Feeding: The primary function of a robot welding gun is to feed the welding wire to the weld joint. The wire feed speed can be adjusted to control the deposition rate and penetration of the weld.2. Gas Shielding: The welding gun directs the flow of shielding gas to protect the weld pool from atmospheric contamination. The type and flow rate of the shielding gascan be adjusted based on the welding process and materials being welded.3. Heat Generation: The welding gun provides the necessary heat to melt the welding wire and the base metal, creating a molten weld pool. The heat is generated by passing a high electrical current through the wire and the workpiece.4. Arc Stability: The welding gun plays a crucial role in maintaining a stable welding arc. It ensures that the arc remains consistent and does not extinguish during the welding process. This is essential for achieving high-quality welds.5. Cooling: In cases where a coolant system is present, the welding gun helps dissipate heat and keeps the gun at an optimal temperature. This prevents overheating and ensures the longevity of the gun.中文回答:介绍:机器人焊枪是机器人焊接系统的关键组成部分之一。
宾采尔清枪器7_TCS说明书PNP型
10
集成式清枪装置
6 调试
1 压缩空气接头 Φ 10mm 图 7:压缩空气接头
通过压缩空气软管对设备进行连接。 工作压力为 6 bar。 如果压缩空气低于 6 bar,则剪丝装置的剪切效率和气动马达的转速会下降。 结果会导致清枪装置的清渣效率下降。
提示 我们建议使用添加润滑油的压缩空气对设备进行操作。 可作为配件提供相应的气源处理装置。
气源处理装置 表 13:可选件
订货编号:830.0075 由过滤减压阀和油雾器组成。 气源处理装置可清除压缩空气中的固体颗粒,并将压缩空气和雾状润滑油进行混合,以 便对气动部件进行润滑。
9
6 调试 6 调试
集成式清枪装置
危险 意外启动会导致人身伤亡的危险 在进行维修、保养、拆卸和修理作业的过程中,应严格遵守下列规定: ·切断电力供应 ·切断压缩空气供应 提示 ·只允许由经过培训的专业人员进行设备调试。
12
集成式清枪装置
6 调试
1 喷硅油装置上盖 2 焊枪喷嘴橡胶密封圈 图 9:喷硅油装置
3 压紧环 4 喷硅油装置 成套
5 防飞溅液流量调整螺栓
随机附带三种规格的橡胶密封圈供选择:D20/D24/D30。在操作设备之前,必须选择与焊枪喷嘴完全贴 合的橡胶密封圈进行安装(参见图 9)。可从橡胶密封圈(1)上的标识数据看出该密封圈都适用于哪 些直径的喷嘴。
大约 650 转每分钟 大约 400 升每分钟 1升 内径不小于 6mm 8Nm
硅油瓶容量 气体工作压力 喷油时间 喷硅油量 表 7:喷硅油装置
1升 最大 6bar 最长 4s(建议 1s) 可调
6 bar 压力下的剪丝能力 实芯焊丝 剪丝时间 表 8:剪丝装置
最大 1.6 毫米 1s
TBi机器人焊枪使用说明
命,L=28mmM8
6
钢送丝软管
324P2045XX
20
焊钢用
PA送丝软管 7 碳特氟隆送丝管
特氟隆送丝管
328P2040XX
20
焊铝用,根据客户需要 选用
4
2
5.1.3水箱中是否有滤芯。 请检查水箱中是否有滤芯(好的滤芯应该有多层过滤)。滤芯可以过滤掉水中的杂质和颗粒,起到保 证水冷通畅的作用。请定时检查滤芯效果,并及时清理或者更换。
5.1.4水质问题。 请使用冷却液或者纯净水(并加注适量防冻液),而不能使用自来水或者矿泉水。并经常检查水质, 如果水变浑浊或者粘稠请及时更换冷却液。
10、每次使用焊枪前后,请检查喷嘴、导电嘴、导电嘴座、气体分流器、绝缘垫片、送丝管、导丝管 等耗材是否正确安装及完好,有问题请及时更换。更换导电嘴时请用扳手固定住导电嘴座,以免导电 嘴座连同导电嘴一起卸下。这样可以延长焊枪使用寿命。只有当导电嘴的螺纹磨平后再更换下导电嘴 座。
11、每次使用焊枪后,请用压缩空气吹扫送丝管和焊枪,防止焊屑影响送丝、损坏焊枪。
2、焊枪安装时一定要注意,需要使枪颈后端带外丝的接头和集成电缆带铜内丝的塑料锁母对正,然 后轻柔顺畅的拧紧!以确保枪颈和电缆的外缘导电面紧密接触!如果没有充分拧紧,枪颈和电缆的导 电面间就会有间隙,由于电流较大会出现间隙放电,而破坏导电面,从而使枪颈和电缆出现不可修复 的故障。
3、对于水冷焊枪,由于间断焊接导致铜锁母经常冷热交替,可能会导致螺纹松动,枪颈和电缆间出 现间隙而放电烧损,所以应每周定期检查并拧紧塑料锁母, 但注意不要用力过大导致滑丝。
5.1.2是否采用加长水管。 请检查系统中是否使用加长水管。整个水管长度(含焊枪电缆长度)是否超过水箱的最大扬程?如必 须采用加长水管请采用加粗的水管,内径 8mm以上,以保证有充足的水流量。另外加长水管的布置也 应该注意,不要用捆扎带将水管捆扎死,应该使其处于自由状态,否则会因为捆扎使水路受阻损失流 量,造成电缆烧损。
奥地利Fronius福尼斯焊接、电焊机、机器人焊接、便捷式焊枪介绍

奥地利Fronius福尼斯焊接、电焊机、机器人焊接、便捷式焊枪介绍奥地利福尼斯(Fronius)公司是欧洲著ming的焊机制造商,也是世界焊接工业的主导企业。
自1945年成立后半个世纪以来,一直以创新的产品领dao着焊机的发展,曾率xian开发出第1台硅整流焊机和第1台逆变焊机。
其先进的技术、可靠的服务,使福尼斯公司在世界范围内备受推崇。
已成为大众、宝马等汽车集团quan球指ding产品,其年销量居欧洲di一。
在国内,FRONIUS焊机已广泛应用到汽车、铁路机车、航天、造船、军gong等高质量要求的行业,并呈快速增长趋势。
产品主要有TP系列手工焊机、TT/MW系列交/直流氩弧焊机、TPS系列MIG/MAG 焊机、VST系列气保焊机、TIME TWIN双丝焊机、热丝TIG焊机、激光MIG焊机、FPA管焊机。
今天,福尼斯公司结合最xian进的微处理器控制技术和逆变技术,推出新一代的微机控制焊机,正引发焊接史shang的一次数字化革命。
新一代焊机采用微处理器监控焊接过程,程序化引弧和收弧,智能化调节参数。
Fronius公司焊接技术,Fronius公司有着远大的目标,并且自信在焊接领域主导焊接技术的发展。
在MIG/MAG、TIG以及手工电焊方面,Fronius取得了非凡的成就。
在TIG焊方面,Fronius最xian将模糊技术引入到焊接领域,研制成功世上di一套全数字化氩弧焊机。
在MIG/MAG焊方面,Fronius开发出革命性的全数字化焊机TransPuls--Synergic以及普通的MIG/MAG焊机VS 3400-2/4000-2/5000-2。
两个系列的机型均带有专家系统,具有非常优良的焊接性能,可以焊接碳钢、不锈钢、合金钢、铝以及铝合金、铜等各种金属。
另外,Fronius还开发了高效高速MIG/MAG焊接设备T.I.M.E Synergic以及双丝焊Time Twin。
全数字化焊机TransPulsSynergic Fronius的全数字化焊机。
机器人焊枪(中文版)
ABIROB® A360, ABIROB® A500
15 mm
X
种类
焊枪
夹持器
ABIROB® A360 / A500
ABIROB® A360 / A500
ABIROB® A360 / A500
可调夹持器
ABIROB® A360 / A500
ABIROB® A360 / A500
机器人
2008 产品目录 亚洲版
Technology for the Welder´s World.
终于,周边设备能完美地满足机器人焊接的高效率需求。
机器人焊接的雏形早在上世纪七十年代出现,阿比科.宾采尔从那一刻起,就开 始对机械人焊接技术进行研发。
今天,阿比科.宾采尔无时无刻地为全世界提供全面的机械人焊枪及周边产品。
技术参数(EN60 974 – 7):符合中国标准
归功于互锁接口技术,使得不需调节TCP值,就能达到焊枪重复定位的效果。易于更换的枪颈以及长使用寿命的电缆组件,给系统的 维修与维护带来便捷。长寿命的电缆组件和枪颈易于更换,清洁维护工作变得轻松简单。
灵活多变,胜任各种焊接工作 标准化的界面-互锁连接技术 枪颈可重复定位 液冷式时,最大额定值达到500A 良好信誉,100%可信赖
“ABIROB® A ECO-LINE”:MIG/MAG 气冷式焊枪系统 ABIROB® A360 / ABIROB® A500 “VTS-interlock”:MIG/MAG液冷式焊枪系统 ROBO VTS 290 / ROBO VTS 500 TS “ABIROB® 350GC”:MIG/MAG气冷式焊枪系统 ABIROB® 350 GC “ROBO Standard”:MIG/MAG液冷式焊枪系统 ROBO 455 D / ROBO 650 TS
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
阿比科.宾采尔机器人焊枪产品及周边产品介绍金属惰性气体(MIG)/金属活性气体(MAG)焊枪⏹“ABIROB A ECO-Line”:MIG/MAG气冷式焊枪系统ABIROB® A300,A360 、ABIROB® A500⏹“ABIROB 350 GC”:MIG/MAG气冷式焊枪系统ABIROB® 350 GC⏹“ROBO Standard” MIG/MAG液冷式焊枪系统ROBO 455 D 、 ROBO 650 TSABIROB W 焊枪系统(液冷式)⏹ABIROB W300、ABIROB W500钨极氩弧焊(TIG)焊枪系统⏹“ABITIG MT”ABITIG® MT 300 W机器人周边产品⏹机器人防碰撞iCAT、CAT 2、iSTM⏹清枪装置BRS-CC⏹冷却箱BWCABIROB A 系列焊枪(气冷)新颖的设计、一流的配置、简易的操作以及小巧的架构等特点无不显示出ABIROB A 系列的出众。
优点:⏹简易小巧的模块化设计:方便于维修与维护⏹超薄设计:理想的可达性⏹高稳定性与重复可定位性:最大化的TCP值;TCP可靠性强(即使发生碰撞)。
⏹创新的互锁系统:在TCP保持不变的情况下快速轻松地更换枪颈。
⏹适用于300A,360A与500A(100%暂载率)ABIROB A300 技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:300A CO2、250A 混合气体、M21(EN439)暂载率:100%焊丝直径:0.8~1.4mmABIROB A360 技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:360A CO2、290A 混合气体、M21(EN439)暂载率:100%焊丝直径:0.8~1.4mmABIROB A500 技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:500A CO2、400A 混合气体、M21(EN439)暂载率:100%焊丝直径:0.8~1.6mmABIROB 350 GC气冷式MAG焊枪,350 A持久、耐用、经济ABIROB 350 GC焊枪系统普遍适用于亚洲区域的弧焊工作。
这个焊枪是为日本机器人制造商(MOTOMAN, PANASONIC, OTC,FANUC)设计的典型的气冷式CO2焊枪。
ABIROB 350 GC能够完全兼容MOTOMAN (TOKIN-ARC)焊枪TCP,夹持位置电缆、易损件导电嘴也完全兼容,由于BINZEL具有更高的材料质量和加工精度,与其他竞争对手的产品相比,具有稳定性好、额定值高及零部件使用寿命长等优点从而减少降低易损件维护、维修的费用。
最突出的优点是通过定位针就可以实现重复定位功能,因此在更换枪颈时减少维护的时间和费用。
我们的优势:1.可以快速更换枪颈。
–增加系统正常运行时间2.更好的温度表现,所以部件使用寿命更长。
–降低成本,增加系统正常运行时间3.由完全绝缘的电气部件组成的与EN标准相符的构造。
–符合员工的安全守则4.更好的性价比,由于BINZEL的世界性销售网络,备用部件在全球范围内都可以买到。
–降低成本和更容易订购的系统网络ABIROB 350 GC技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:350A CO2、300A 混合气体暂载率:100%焊丝直径:0.8~1.2mm“ROBO 455D、ROBO650TS”:MIG/MAG焊枪系统(液冷式)耐用的、可信赖的、经济的BINZEL公司ROBO系列焊枪是液冷式弧焊的最佳工具,它适合于要求低设备成本的和对系统工作时间与维修时间要求不高的机器人工作室。
焊枪性能与部件质量属于宾采尔的最高标准。
比较ABIROB A或VTS互锁系列,本系列价格降低的原因在于除去了枪颈更换功能。
气喷功能、手动送丝机按键和控制信号线接口(CAT2)属于ROBO系列焊枪的标准配置。
⏹产品成本低、质量高⏹安装方便、使用简单⏹100%暂载率、100%可信赖⏹产品得到广泛的认可ROBO 455D 技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:450A CO2、400A 混合气体、M21(EN439)暂载率:100%焊丝直径:0.8~1.6mmROBO 650TS 技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:600A CO2、500A 混合气体、M21(EN439)暂载率:100%焊丝直径:1.0~3.2mmROBO 455DROBO 650TS“ABITIG MT 300W”:TIG焊枪系统(液冷式)快捷、安全、可重复定位ABITIG MT 300W焊枪适用于钨极氩弧钎焊和焊接,能胜任各种材料的焊接工作。
为了保证高质量的、不间断的焊接工作,该焊枪实现了在机器人焊接室外预设钨电极、保养和维修。
该设计使得更换设定好的钨电极更为方便快捷。
这意味着生产力将大幅度提高。
因为在焊接过程中,钨电极会发生形变,在钨电极形变到不能使用之前,可以使用钨电极预设器,在工作室外预先设定另一个钨电极,这样保证了连续稳定的焊接工作。
⏹小巧的设计⏹灵活、轻便的电缆组件适用于所有的使用惰性气体保护钨电极的电弧焊系统。
⏹带有预设好的钨电极⏹适用于焊接简单的工件ABITIG MT 300 W技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:320A CO2、2300A 混合气体、M21(EN439)暂载率:100%焊丝直径:1.6~4.8mmABIROB W 焊枪系统(液冷式)实惠、高负荷、稳定高强度的焊接性能,新的焊枪接头和液冷式电缆技术。
根据市场上需求高工作负荷而研发出来的ABIROB W 系列焊枪。
⏹ 电流高达500A ,100%混合气体 ⏹ 对导电嘴喷嘴有双重冷却循环冷却⏹ 坚固的设计(外管带不锈钢网套),喷嘴的螺纹带清洗槽,使寿命更长⏹ 焊枪接头带有定位针,保证TCP 尺寸下的高重复可插换性,减少维护维修时间 ⏹ 枪颈连接头连接电缆,工作可靠稳定、耐用 ⏹ 电缆组使用寿命长,维护费用低 ⏹完美适合于使用于自动化工业中MIG 焊接ABIROB W 300 技术参数(EN60 974-7):符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:300A 混合气体、M21(EN439) 暂载率:100%焊丝直径:0.8~1.2mmABIROB W 500 技术参数(EN60 974-7): 符合中国标准GB/T15579.7-2005弧焊设备;第七部分:焊枪额定值:500A 混合气体、M21(EN439) 暂载率:100%焊丝直径:0.8~1.6mm双重冷却循环气体分流器喷嘴导电嘴导电嘴座ABIROB W 500ABIROB W 300防碰撞器 iCAT安全性与灵活性的完美结合iCAT 机器人与防碰撞器为新一代的电缆同轴的焊接机器人提供高安全性和灵活性,它同时使用于空冷式ABIROB 350GC,ABIROB A360/500和液冷式ABIROB W300/500的焊枪。
一旦焊枪与工件发生碰撞,iCAT 会随碰撞发生10°以下的偏转。
iCAT 的该项缓冲功能不仅能够保护焊枪,同时还能保护机器人。
另外,iCAT 拥有碰撞保护功能,当碰撞发生时,iCAT 迅速反应,立刻停止机器人。
优点:⏹ 出色的耐扭转能力,与第六轴的电缆组件的可转角度超过480°(+/-240°) ⏹ 出色的系统性能和高安全系数得益于高可重复性 ⏹ 简单实用的设计有利于提高产量和增长使用寿命⏹ 灵活,可达性好⏹ 安装方便、操作简易能有效降低维修成本 ⏹ 全面的防飞溅防尘设计使系统更加稳定可靠 ⏹ 附加功能:气喷功能和内喷硅油功能使用范围:如图iCAT – ABIROB W (液冷)内置防撞开关机器人防碰撞器“CAT 2”:为您提供更安全的焊接快速反应,停止冲击更快的机器人,更强的动力和表面更复杂更薄的金属工件等都是容易引起碰撞发生的要素。
对此,CAT 2适用于电缆外置的焊枪。
强大的防碰撞功能保证焊接工作安全地进行。
丰富的配件使得CAT 2能适应各种各样的TCP需求。
优点:⏹感应任何位置的偏差⏹撞击发生时立刻停止⏹精准的缓冲区间设计降低了停机时间⏹精准的微动开关带来革命性的开关反应时间⏹追求最高精准度、轻薄材料焊接工作的最佳工具⏹功能可视化使得维修、维护更加方便、快捷⏹使用适配法兰(塑料或铝制),CAT 2适配于大多数机器人种类与操作系统机器人碰撞器“CAT 2”技术参数:尺寸:对角长度:75MM;对边长度:65MM;高:87MM(机器人法兰>释放法兰)重量:大约630克最大偏移量:在X与Y平面,每根弹簧10-14度;在Z平面,每根弹簧4-8毫米即时止动:在Z轴上,0.5-1度;在X与Y轴方向偏差大约1.5度;Z轴方向偏差大约0.5-1毫米可重复性:小于+/-0.04毫米(离机器人法兰300毫米处)安全开关:24伏特,直流,最大100毫安CAT 2的可感应偏移:X或Y方向的撞击,绕Z轴转动和Z轴方向的撞击。
承受压力力矩由弹簧种类决定,同时又取决于焊枪的种类与重量。
共5种弹簧可选择。
最新的保护装置--iSTM中空机器人越来越多的在国际市场上倍受欢迎。
由于电缆走在机器人第六轴,与之成为一体,所以这类机器人拥有了很好的焊接可达性。
ABICOR BINZEL 已经专为这种新一代机器人开发了一套保护装置。
现在我们已经专为FANUC 机器人和ABB 机器人开发了一套最新的保护装置--iSTM . 经典的设计、可靠的质量、专一的售后服务极大的满足了广大客户的需求。
iSTM 焊枪保护装置▪ 坚实耐用,无碰撞传感器▪ 标准化的电缆接头 – 可以灵活的选择和维护系统 电缆组件▪ 抗拉力电缆 - 高使用寿命▪ BINZEL 欧式接头,也能适用于其他送丝机接头 枪颈▪ BINZEL 空冷系列 ABIROB A360 / A500 / A300▪ BINZEL 水冷系列 ABIROB W500 / W300 ▪ BINZEL 二氧化碳冷却系列 ABIROB 350 GC▪ 经得起考验,值得信赖 ▪ 选择项▪ 整套系统同样适用于防碰撞ICAT 优点:▪ 专为新一代中空弧焊机器人设计的防碰撞保护▪ 快速便捷的安装▪ 简单实用的设计有利于提高生产效率,增长使用寿命▪ 全面的防飞溅防尘设计使系统更加稳定可靠 ▪ 结构精巧灵活▪ 出色的耐扭转能力,与第六周同轴的电缆组件的可旋转角度超过480度(+/-240度)▪ 很高的电缆使用寿命,在一定的条件下甚至能超过12个月 ▪ 有效的降低了维修成本▪ 能很好的匹配空冷及水冷焊枪ABIROB A, ABIROB W (and ABIROB 350 GC)▪ 很好的和BINZEL 焊枪界面匹配ABB 机器人清枪装置:“BRS-CC”即插即用清枪装置BRS-CC是全面的全自动的枪颈维护平台。