【WO2020005359A1】SYSTEMFORVERIFICATIONOFTESTINGMACH
出厂验收测试FAT

嘉华通软
工厂测试方案
Factory Acceptance Test Protocol
文件编号 Doc.Ref 设备型号 Equipment
JW5301
监管码赋码系统工厂测试方案
颁发部门/Issuing Department: 生效日期/Effective Date:
质量保证部 Quality Assurance Department
年/Year
月/Month
日/Day
起草人 Issued by 起草人 Issued by 审核人 Reviewed by 审核人 Reviewed by 审核人 Reviewed by 审核人 Reviewed by 批准人 Approved by 批准人 Approved by
单位 Company
□ 质量控制部/Quality Control Department □ 物 料 管 理 部 /Materials Management Department □ 销售部/Sales Department □ 行政管理部/Administration Department □ 生 产 管 理 部 /Production Management Department □ 疫苗二室/Vaccine Office Two □ 分装室/Filling Office □ 其他 Other
部门 Department
姓名 Name
签字 Signature
日期 Date
涉及部门/Involves Department:
□ 质量保证部/Quality Assurance Department □ 工程管理部/Engineering Management Department
Statement of Volatility – Precision 5470
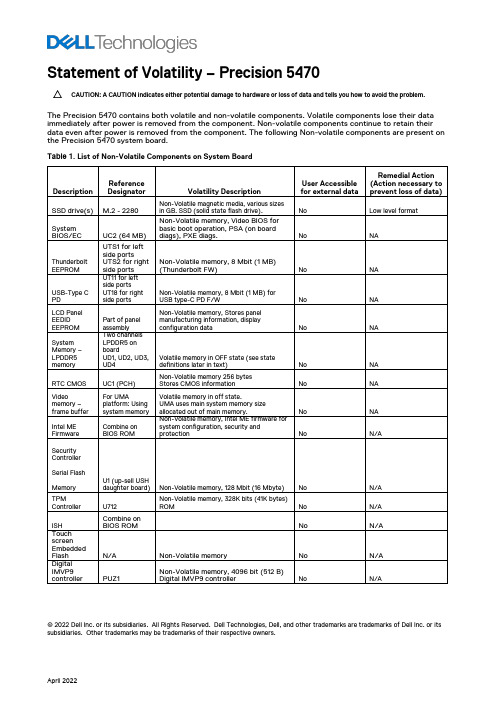
April 2022Statement of Volatility – Precision 5470CAUTION: A CAUTION indicates either potential damage to hardware or loss of data and tells you how to avoid the problem.The Precision 5470 contains both volatile and non-volatile components. Volatile components lose their data immediately after power is removed from the component. Non-volatile components continue to retain their data even after power is removed from the component. The following Non-volatile components are present on the Precision 5470 system board.Table 1. List of Non-Volatile Components on System BoardDescriptionReference DesignatorVolatility DescriptionUser Accessiblefor external dataRemedial Action (Action necessary to prevent loss of data)SSD drive(s) M.2 - 2280Non-Volatile magnetic media, various sizes in GB. SSD (solid state flash drive).NoLow level formatSystem BIOS/ECUC2 (64 MB) Non-Volatile memory, Video BIOS for basic boot operation, PSA (on board diags), PXE diags.No NAThunderbolt EEPROM UTS1 for left side portsUTS2 for right side ports Non-Volatile memory, 8 Mbit (1 MB) (Thunderbolt FW)No NAUSB-Type C PD UT11 for left side ports UT18 for right side ports Non-Volatile memory, 8 Mbit (1 MB) for USB type-C PD F/WNo NALCD Panel EEDID EEPROM Part of panel assembly Non-Volatile memory, Stores panel manufacturing information, display configuration dataNo NASystem Memory – LPDDR5 memory Two channels LPDDR5 on boardUD1, UD2, UD3, UD4Volatile memory in OFF state (see state definitions later in text) No NA RTC CMOS UC1 (PCH) Non-Volatile memory 256 bytes Stores CMOS informationNoNAVideo memory – frame buffer For UMAplatform: Using system memory Volatile memory in off state.UMA uses main system memory size allocated out of main memory.No NA Intel ME Firmware Combine on BIOS ROMNon-Volatile memory, Intel ME firmware for system configuration, security and protectionNoN/ASecurity ControllerSerial FlashMemory U1 (up-sell USH daughter board) Non-Volatile memory, 128 Mbit (16 Mbyte) No N/A TPMController U712 Non-Volatile memory, 328K bits (41K bytes) ROM No N/A ISH Combine on BIOS ROMNoN/ATouch screen Embedded Flash N/A Non-Volatile memoryNo N/A Digital IMVP9 controllerPUZ1Non-Volatile memory, 4096 bit (512 B) Digital IMVP9 controllerNoN/A© 2022 Dell Inc. or its subsidiaries. All Rights Reserved. Dell Technologies, Dell, and other trademarks are trademarks of Dell Inc. or its subsidiaries. Other trademarks may be trademarks of their respective owners.。
authorizationverificationr -回复
authorizationverificationr -回复什么是授权验证(Authorization Verification)?授权验证(Authorization Verification)是指在计算机系统中,对用户或程序的授权信息进行验证的过程。
它主要用于确认用户或程序的身份和权限,以确保只有合法的用户或程序能够访问特定资源或执行特定操作。
授权验证通常是通过比较用户或程序提供的身份验证信息与系统存储的授权信息来完成的。
在计算机系统中,授权验证是安全性和访问管理的关键组成部分。
它帮助保护系统免受未经授权的访问、信息泄露和数据损坏等威胁。
通过对用户或程序的身份进行验证,系统可以控制其访问权限,并对其进行追踪和审计。
这是一种非常重要的安全措施,特别是对于那些存储敏感数据或提供关键服务的系统。
授权验证的主要步骤是什么?授权验证的过程通常包括以下几个步骤:1. 用户身份验证(User Authentication):这是验证用户身份的第一步。
用户通常需要提供用户名和密码等凭据,以证明他们是合法的用户。
这些凭据可以与系统中存储的已注册用户信息进行比较,以确认用户的合法性。
2. 访问权限验证(Access Rights Verification):一旦用户的身份被验证通过,系统将根据用户的权限配置对其进行访问权限验证。
这通常涉及检查用户是否具有执行所请求操作所需的权限。
例如,如果用户试图访问受限资源或执行管理员操作,系统将检查其权限并相应地授权或拒绝访问。
3. 会话管理(Session Management):为了确保安全性,系统通常会为每个用户分配一个会话,并为其生成一个会话令牌或标识符。
这个会话令牌将与用户相关联,并用于跟踪用户的活动和验证其访问权限。
会话管理涉及对会话令牌的生成、维护和注销等操作。
4. 审计与日志记录(Audit and Logging):授权验证完成后,系统通常会记录相关的审计日志,以便跟踪和追溯用户的活动。
Indradrive 系列 故障代码

Error MessagesF9001 Error internal function call.F9002 Error internal RTOS function callF9003 WatchdogF9004 Hardware trapF8000 Fatal hardware errorF8010 Autom. commutation: Max. motion range when moving back F8011 Commutation offset could not be determinedF8012 Autom. commutation: Max. motion rangeF8013 Automatic commutation: Current too lowF8014 Automatic commutation: OvercurrentF8015 Automatic commutation: TimeoutF8016 Automatic commutation: Iteration without resultF8017 Automatic commutation: Incorrect commutation adjustment F8018 Device overtemperature shutdownF8022 Enc. 1: Enc. signals incorr. (can be cleared in ph. 2) F8023 Error mechanical link of encoder or motor connectionF8025 Overvoltage in power sectionF8027 Safe torque off while drive enabledF8028 Overcurrent in power sectionF8030 Safe stop 1 while drive enabledF8042 Encoder 2 error: Signal amplitude incorrectF8057 Device overload shutdownF8060 Overcurrent in power sectionF8064 Interruption of motor phaseF8067 Synchronization PWM-Timer wrongF8069 +/-15Volt DC errorF8070 +24Volt DC errorF8076 Error in error angle loopF8078 Speed loop error.F8079 Velocity limit value exceededF8091 Power section defectiveF8100 Error when initializing the parameter handlingF8102 Error when initializing power sectionF8118 Invalid power section/firmware combinationF8120 Invalid control section/firmware combinationF8122 Control section defectiveF8129 Incorrect optional module firmwareF8130 Firmware of option 2 of safety technology defectiveF8133 Error when checking interrupting circuitsF8134 SBS: Fatal errorF8135 SMD: Velocity exceededF8140 Fatal CCD error.F8201 Safety command for basic initialization incorrectF8203 Safety technology configuration parameter invalidF8813 Connection error mains chokeF8830 Power section errorF8838 Overcurrent external braking resistorF7010 Safely-limited increment exceededF7011 Safely-monitored position, exceeded in pos. DirectionF7012 Safely-monitored position, exceeded in neg. DirectionF7013 Safely-limited speed exceededF7020 Safe maximum speed exceededF7021 Safely-limited position exceededF7030 Position window Safe stop 2 exceededF7031 Incorrect direction of motionF7040 Validation error parameterized - effective thresholdF7041 Actual position value validation errorF7042 Validation error of safe operation modeF7043 Error of output stage interlockF7050 Time for stopping process exceeded8.3.15 F7051 Safely-monitored deceleration exceeded (159)8.4 Travel Range Errors (F6xxx) (161)8.4.1 Behavior in the Case of Travel Range Errors (161)8.4.2 F6010 PLC Runtime Error (162)8.4.3 F6024 Maximum braking time exceeded (163)8.4.4 F6028 Position limit value exceeded (overflow) (164)8.4.5 F6029 Positive position limit exceeded (164)8.4.6 F6030 Negative position limit exceeded (165)8.4.7 F6034 Emergency-Stop (166)8.4.8 F6042 Both travel range limit switches activated (167)8.4.9 F6043 Positive travel range limit switch activated (167)8.4.10 F6044 Negative travel range limit switch activated (168)8.4.11 F6140 CCD slave error (emergency halt) (169)8.5 Interface Errors (F4xxx) (169)8.5.1 Behavior in the Case of Interface Errors (169)8.5.2 F4001 Sync telegram failure (170)8.5.3 F4002 RTD telegram failure (171)8.5.4 F4003 Invalid communication phase shutdown (172)8.5.5 F4004 Error during phase progression (172)8.5.6 F4005 Error during phase regression (173)8.5.7 F4006 Phase switching without ready signal (173)8.5.8 F4009 Bus failure (173)8.5.9 F4012 Incorrect I/O length (175)8.5.10 F4016 PLC double real-time channel failure (176)8.5.11 F4017 S-III: Incorrect sequence during phase switch (176)8.5.12 F4034 Emergency-Stop (177)8.5.13 F4140 CCD communication error (178)8.6 Non-Fatal Safety Technology Errors (F3xxx) (178)8.6.1 Behavior in the Case of Non-Fatal Safety Technology Errors (178)8.6.2 F3111 Refer. missing when selecting safety related end pos (179)8.6.3 F3112 Safe reference missing (179)8.6.4 F3115 Brake check time interval exceeded (181)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand ControlsI Bosch Rexroth AG VII/XXIITable of ContentsPage8.6.5 F3116 Nominal load torque of holding system exceeded (182)8.6.6 F3117 Actual position values validation error (182)8.6.7 F3122 SBS: System error (183)8.6.8 F3123 SBS: Brake check missing (184)8.6.9 F3130 Error when checking input signals (185)8.6.10 F3131 Error when checking acknowledgment signal (185)8.6.11 F3132 Error when checking diagnostic output signal (186)8.6.12 F3133 Error when checking interrupting circuits (187)8.6.13 F3134 Dynamization time interval incorrect (188)8.6.14 F3135 Dynamization pulse width incorrect (189)8.6.15 F3140 Safety parameters validation error (192)8.6.16 F3141 Selection validation error (192)8.6.17 F3142 Activation time of enabling control exceeded (193)8.6.18 F3143 Safety command for clearing errors incorrect (194)8.6.19 F3144 Incorrect safety configuration (195)8.6.20 F3145 Error when unlocking the safety door (196)8.6.21 F3146 System error channel 2 (197)8.6.22 F3147 System error channel 1 (198)8.6.23 F3150 Safety command for system start incorrect (199)8.6.24 F3151 Safety command for system halt incorrect (200)8.6.25 F3152 Incorrect backup of safety technology data (201)8.6.26 F3160 Communication error of safe communication (202)8.7 Non-Fatal Errors (F2xxx) (202)8.7.1 Behavior in the Case of Non-Fatal Errors (202)8.7.2 F2002 Encoder assignment not allowed for synchronization (203)8.7.3 F2003 Motion step skipped (203)8.7.4 F2004 Error in MotionProfile (204)8.7.5 F2005 Cam table invalid (205)8.7.6 F2006 MMC was removed (206)8.7.7 F2007 Switching to non-initialized operation mode (206)8.7.8 F2008 RL The motor type has changed (207)8.7.9 F2009 PL Load parameter default values (208)8.7.10 F2010 Error when initializing digital I/O (-> S-0-0423) (209)8.7.11 F2011 PLC - Error no. 1 (210)8.7.12 F2012 PLC - Error no. 2 (210)8.7.13 F2013 PLC - Error no. 3 (211)8.7.14 F2014 PLC - Error no. 4 (211)8.7.15 F2018 Device overtemperature shutdown (211)8.7.16 F2019 Motor overtemperature shutdown (212)8.7.17 F2021 Motor temperature monitor defective (213)8.7.18 F2022 Device temperature monitor defective (214)8.7.19 F2025 Drive not ready for control (214)8.7.20 F2026 Undervoltage in power section (215)8.7.21 F2027 Excessive oscillation in DC bus (216)8.7.22 F2028 Excessive deviation (216)8.7.23 F2031 Encoder 1 error: Signal amplitude incorrect (217)VIII/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage8.7.24 F2032 Validation error during commutation fine adjustment (217)8.7.25 F2033 External power supply X10 error (218)8.7.26 F2036 Excessive position feedback difference (219)8.7.27 F2037 Excessive position command difference (220)8.7.28 F2039 Maximum acceleration exceeded (220)8.7.29 F2040 Device overtemperature 2 shutdown (221)8.7.30 F2042 Encoder 2: Encoder signals incorrect (222)8.7.31 F2043 Measuring encoder: Encoder signals incorrect (222)8.7.32 F2044 External power supply X15 error (223)8.7.33 F2048 Low battery voltage (224)8.7.34 F2050 Overflow of target position preset memory (225)8.7.35 F2051 No sequential block in target position preset memory (225)8.7.36 F2053 Incr. encoder emulator: Pulse frequency too high (226)8.7.37 F2054 Incr. encoder emulator: Hardware error (226)8.7.38 F2055 External power supply dig. I/O error (227)8.7.39 F2057 Target position out of travel range (227)8.7.40 F2058 Internal overflow by positioning input (228)8.7.41 F2059 Incorrect command value direction when positioning (229)8.7.42 F2063 Internal overflow master axis generator (230)8.7.43 F2064 Incorrect cmd value direction master axis generator (230)8.7.44 F2067 Synchronization to master communication incorrect (231)8.7.45 F2068 Brake error (231)8.7.46 F2069 Error when releasing the motor holding brake (232)8.7.47 F2074 Actual pos. value 1 outside absolute encoder window (232)8.7.48 F2075 Actual pos. value 2 outside absolute encoder window (233)8.7.49 F2076 Actual pos. value 3 outside absolute encoder window (234)8.7.50 F2077 Current measurement trim wrong (235)8.7.51 F2086 Error supply module (236)8.7.52 F2087 Module group communication error (236)8.7.53 F2100 Incorrect access to command value memory (237)8.7.54 F2101 It was impossible to address MMC (237)8.7.55 F2102 It was impossible to address I2C memory (238)8.7.56 F2103 It was impossible to address EnDat memory (238)8.7.57 F2104 Commutation offset invalid (239)8.7.58 F2105 It was impossible to address Hiperface memory (239)8.7.59 F2110 Error in non-cyclical data communic. of power section (240)8.7.60 F2120 MMC: Defective or missing, replace (240)8.7.61 F2121 MMC: Incorrect data or file, create correctly (241)8.7.62 F2122 MMC: Incorrect IBF file, correct it (241)8.7.63 F2123 Retain data backup impossible (242)8.7.64 F2124 MMC: Saving too slowly, replace (243)8.7.65 F2130 Error comfort control panel (243)8.7.66 F2140 CCD slave error (243)8.7.67 F2150 MLD motion function block error (244)8.7.68 F2174 Loss of motor encoder reference (244)8.7.69 F2175 Loss of optional encoder reference (245)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG IX/XXIITable of ContentsPage8.7.70 F2176 Loss of measuring encoder reference (246)8.7.71 F2177 Modulo limitation error of motor encoder (246)8.7.72 F2178 Modulo limitation error of optional encoder (247)8.7.73 F2179 Modulo limitation error of measuring encoder (247)8.7.74 F2190 Incorrect Ethernet configuration (248)8.7.75 F2260 Command current limit shutoff (249)8.7.76 F2270 Analog input 1 or 2, wire break (249)8.7.77 F2802 PLL is not synchronized (250)8.7.78 F2814 Undervoltage in mains (250)8.7.79 F2815 Overvoltage in mains (251)8.7.80 F2816 Softstart fault power supply unit (251)8.7.81 F2817 Overvoltage in power section (251)8.7.82 F2818 Phase failure (252)8.7.83 F2819 Mains failure (253)8.7.84 F2820 Braking resistor overload (253)8.7.85 F2821 Error in control of braking resistor (254)8.7.86 F2825 Switch-on threshold braking resistor too low (255)8.7.87 F2833 Ground fault in motor line (255)8.7.88 F2834 Contactor control error (256)8.7.89 F2835 Mains contactor wiring error (256)8.7.90 F2836 DC bus balancing monitor error (257)8.7.91 F2837 Contactor monitoring error (257)8.7.92 F2840 Error supply shutdown (257)8.7.93 F2860 Overcurrent in mains-side power section (258)8.7.94 F2890 Invalid device code (259)8.7.95 F2891 Incorrect interrupt timing (259)8.7.96 F2892 Hardware variant not supported (259)8.8 SERCOS Error Codes / Error Messages of Serial Communication (259)9 Warnings (Exxxx) (263)9.1 Fatal Warnings (E8xxx) (263)9.1.1 Behavior in the Case of Fatal Warnings (263)9.1.2 E8025 Overvoltage in power section (263)9.1.3 E8026 Undervoltage in power section (264)9.1.4 E8027 Safe torque off while drive enabled (265)9.1.5 E8028 Overcurrent in power section (265)9.1.6 E8029 Positive position limit exceeded (266)9.1.7 E8030 Negative position limit exceeded (267)9.1.8 E8034 Emergency-Stop (268)9.1.9 E8040 Torque/force actual value limit active (268)9.1.10 E8041 Current limit active (269)9.1.11 E8042 Both travel range limit switches activated (269)9.1.12 E8043 Positive travel range limit switch activated (270)9.1.13 E8044 Negative travel range limit switch activated (271)9.1.14 E8055 Motor overload, current limit active (271)9.1.15 E8057 Device overload, current limit active (272)X/XXII Bosch Rexroth AG | Electric Drivesand ControlsRexroth IndraDrive | Troubleshooting GuideTable of ContentsPage9.1.16 E8058 Drive system not ready for operation (273)9.1.17 E8260 Torque/force command value limit active (273)9.1.18 E8802 PLL is not synchronized (274)9.1.19 E8814 Undervoltage in mains (275)9.1.20 E8815 Overvoltage in mains (275)9.1.21 E8818 Phase failure (276)9.1.22 E8819 Mains failure (276)9.2 Warnings of Category E4xxx (277)9.2.1 E4001 Double MST failure shutdown (277)9.2.2 E4002 Double MDT failure shutdown (278)9.2.3 E4005 No command value input via master communication (279)9.2.4 E4007 SERCOS III: Consumer connection failed (280)9.2.5 E4008 Invalid addressing command value data container A (280)9.2.6 E4009 Invalid addressing actual value data container A (281)9.2.7 E4010 Slave not scanned or address 0 (281)9.2.8 E4012 Maximum number of CCD slaves exceeded (282)9.2.9 E4013 Incorrect CCD addressing (282)9.2.10 E4014 Incorrect phase switch of CCD slaves (283)9.3 Possible Warnings When Operating Safety Technology (E3xxx) (283)9.3.1 Behavior in Case a Safety Technology Warning Occurs (283)9.3.2 E3100 Error when checking input signals (284)9.3.3 E3101 Error when checking acknowledgment signal (284)9.3.4 E3102 Actual position values validation error (285)9.3.5 E3103 Dynamization failed (285)9.3.6 E3104 Safety parameters validation error (286)9.3.7 E3105 Validation error of safe operation mode (286)9.3.8 E3106 System error safety technology (287)9.3.9 E3107 Safe reference missing (287)9.3.10 E3108 Safely-monitored deceleration exceeded (288)9.3.11 E3110 Time interval of forced dynamization exceeded (289)9.3.12 E3115 Prewarning, end of brake check time interval (289)9.3.13 E3116 Nominal load torque of holding system reached (290)9.4 Non-Fatal Warnings (E2xxx) (290)9.4.1 Behavior in Case a Non-Fatal Warning Occurs (290)9.4.2 E2010 Position control with encoder 2 not possible (291)9.4.3 E2011 PLC - Warning no. 1 (291)9.4.4 E2012 PLC - Warning no. 2 (291)9.4.5 E2013 PLC - Warning no. 3 (292)9.4.6 E2014 PLC - Warning no. 4 (292)9.4.7 E2021 Motor temperature outside of measuring range (292)9.4.8 E2026 Undervoltage in power section (293)9.4.9 E2040 Device overtemperature 2 prewarning (294)9.4.10 E2047 Interpolation velocity = 0 (294)9.4.11 E2048 Interpolation acceleration = 0 (295)9.4.12 E2049 Positioning velocity >= limit value (296)9.4.13 E2050 Device overtemp. Prewarning (297)Troubleshooting Guide | Rexroth IndraDrive Electric Drivesand Controls| Bosch Rexroth AG XI/XXIITable of ContentsPage9.4.14 E2051 Motor overtemp. prewarning (298)9.4.15 E2053 Target position out of travel range (298)9.4.16 E2054 Not homed (300)9.4.17 E2055 Feedrate override S-0-0108 = 0 (300)9.4.18 E2056 Torque limit = 0 (301)9.4.19 E2058 Selected positioning block has not been programmed (302)9.4.20 E2059 Velocity command value limit active (302)9.4.21 E2061 Device overload prewarning (303)9.4.22 E2063 Velocity command value > limit value (304)9.4.23 E2064 Target position out of num. range (304)9.4.24 E2069 Holding brake torque too low (305)9.4.25 E2070 Acceleration limit active (306)9.4.26 E2074 Encoder 1: Encoder signals disturbed (306)9.4.27 E2075 Encoder 2: Encoder signals disturbed (307)9.4.28 E2076 Measuring encoder: Encoder signals disturbed (308)9.4.29 E2077 Absolute encoder monitoring, motor encoder (encoder alarm) (308)9.4.30 E2078 Absolute encoder monitoring, opt. encoder (encoder alarm) (309)9.4.31 E2079 Absolute enc. monitoring, measuring encoder (encoder alarm) (309)9.4.32 E2086 Prewarning supply module overload (310)9.4.33 E2092 Internal synchronization defective (310)9.4.34 E2100 Positioning velocity of master axis generator too high (311)9.4.35 E2101 Acceleration of master axis generator is zero (312)9.4.36 E2140 CCD error at node (312)9.4.37 E2270 Analog input 1 or 2, wire break (312)9.4.38 E2802 HW control of braking resistor (313)9.4.39 E2810 Drive system not ready for operation (314)9.4.40 E2814 Undervoltage in mains (314)9.4.41 E2816 Undervoltage in power section (314)9.4.42 E2818 Phase failure (315)9.4.43 E2819 Mains failure (315)9.4.44 E2820 Braking resistor overload prewarning (316)9.4.45 E2829 Not ready for power on (316)。
黑莓手机所有软硬件错误代码中译参考
黑莓手机所有软硬件错误代码中译参考现在国内使用黑莓手机的玩家是越来越多了,但很多玩家在使用的过程中遇上了一些错误提示时不明白提示的内容。
下面小编就提供从网络上收集到的黑莓BlackBerry 手持设备所有软/硬件在使用过程中出现的错误提示代码的翻译参考资料及部分问题的解决办法。
下列表格将列出在BlackBerry手持设备上java虚拟机可能出现的错误代码和详细信息!101 Previous startup failed当jvm启动过程中,前一个启动的项目失败了,设备已经被重置。
这个错误表明jvm在启动时找到“启动进行中”这个标志位已经设置了,当前屏幕信息为:有意停止“系统继续重置”这个死循环,来纠正系统当前不正确的启动操作102 Invalid code in filesystem在文件系统中发现无效的代码。
手持设备的系统检查.cod文件的变动时,在一些.cod文件中检测到这个问题。
他肯可能是表明生成过程中发生了错误,即在cod文件中存在一个有问题的签名。
如果一些用户操作设备导致这个问题的发生,文件系统的代码被破坏,复位的周期将是连续循环的。
唯一的恢复方法是擦去设备并且恢复一个新的系统。
103 Cannot find starting address找不到启动的地址,用于启动系统的引导cod文件找不到。
这个错误表明一个用于引导系统的cod文件没有安装到设备上,或者格式不正确。
104 Uncaught:非预期:《java模块名》jvm诊断出一个非预期的java代码异常错误抛出,程序可以继续执行,或者手持设备可以用桌面管理器连是USB线安装一个程序调试器来查看这些错误信息。
事件日志里应该包含了异常错误的信息105 Example, DbRecSize( %d ) -> %d举例,DbRecSize( %d ) -> %d文件系统API已经为一种特定的操作返回一种错误状态码,他可能表明在jvm上存在一个无效的或者错误的文件系统106 Graphics system error图形系统错误,在设备的图形系统里一个错误发生并被检测到107 operator new() called在jvm里,操作new()回调一个c++类,该函数代码没有被正确的从VMRamObject 对象来继承,新操作符需要被正确的继承。
selfregistration error -回复
selfregistration error -回复自助注册错误: 解决方法全指南引言:在数字化时代,自助注册成为了许多网站和平台提供的一项便利服务。
然而,有时候我们可能会遇到自助注册错误导致无法完成注册。
本文将逐步解释常见的自助注册错误,并提供一些常用的解决办法。
第一步:检查网络连接最常见的一种自助注册错误是网络连接问题。
如果您无法打开自助注册页面,或者在注册过程中遇到连接问题,请首先检查您的网络连接是否正常。
重启路由器或切换至其他网络可能有助于解决这个问题。
第二步:检查输入信息第二种常见的自助注册错误是输入信息有误。
在填写注册表格时输入错误或漏掉必填项可能会导致注册失败。
请确保您正确填写了您的用户名、电子邮件地址、密码等信息。
此外,还要确保您输入的信息符合网站或平台的要求,如密码的长度、特殊字符的要求等等。
第三步:验证电子邮件地址许多网站和平台在自助注册后都会通过电子邮件向您发送验证链接。
这是为了确保您提供的电子邮件地址确实是有效并属于您个人的。
如果您已经完成自助注册但未收到验证邮件,请检查您的垃圾邮件文件夹。
如果验证邮件一直未收到,请尝试重新发送或联系网站客服获取帮助。
第四步:解决验证码问题自助注册过程中的验证码是为了确认您是一个真实的用户而不是一个机器人。
如果您在输入验证码时遇到困难,如难以辨认字符、验证码无法显示等,请尝试刷新验证码或更换浏览器。
有些时候,暂时禁用浏览器的插件也可以解决验证码问题。
第五步:清除缓存和Cookies当您在自助注册过程中遇到意外错误或问题时,尝试清除浏览器缓存和Cookies通常是一个解决办法。
缓存和Cookies是浏览器用于存储临时数据的文件,有时候这些文件会导致自助注册出现问题。
清除缓存和Cookies 后,重新加载注册页面,并尝试注册。
第六步:尝试其他浏览器或设备如果您在同一台设备上使用不同的浏览器仍无法完成自助注册,您可以尝试在其他设备上进行注册。
有时候,浏览器的兼容性问题可能导致自助注册出现错误。
中国移动VoLTE终端技术规范
中国移动通信企业标准QB-╳╳-╳╳╳-╳╳╳╳中国移动V o L T E终端技术规范C h i n a M o b i l e V o L T E T e r m i n a lT e c h n o l o g y S p e c i f i c a t i o n版本号:1.0.0╳╳╳╳-╳╳-╳╳发布╳╳╳╳-╳╳-╳╳实施目录前言 (IV)1.范围 (1)2.规范性引用文件 (1)3.术语、定义和缩略语 (5)4.总则 (8)4.1中国移动VoLTE终端规范的不同阶段 (8)4.2中国移动VoLTE终端规范的用词 (8)4.3本标准规范和其它标准的关系 (8)4.4本标准规范和LTE终端规范、TD-SCDMA终端规范、GSM终端规范的关系 (8)5.终端功能要求 (9)5.1.概述 (9)5.2.工作模式 (9)5.3.频段要求 (9)5.4.Inter-RAT数据互操作要求 (10)5.5.话音模式选择 (11)5.5.1.话音模式配置 (11)5.5.2.话音模式选择原则 (11)5.6.接入层功能 (12)5.6.1.PDN连接 (12)5.6.2.Ipv6 (18)5.6.3.承载要求 (19)5.6.4.LTE无线增强功能 (20)5.7.IMS控制功能 (22)5.7.1.注册和注销 (22)5.7.2.鉴权 (24)5.7.3.会话管理 (24)5.7.4.媒体切换 (26)5.7.5.订阅 (27)5.7.6.Forking (27)5.8.异常处理 (27)5.8.1.初始注册异常情况 (27)5.8.2.重注册异常情况 (28)5.8.3.SilentRedial方案 (28)5.9.IMS媒体功能 (29)5.9.1.话音编解码 (29)5.9.2.话音质量增强 (30)5.9.3.视频编解码 (30)5.10. SRVCC (31)5.10.1.SRVCC能力上报 (31)5.10.2.SRVCC测量 (31)5.10.3.SRVCC流程 (31)5.11.机卡接口要求 (33)5.11.1.卡类型 (33)5.11.2.BIP协议 (33)5.12.国际漫游要求 (33)6.终端业务要求 (34)6.1.业务组合要求 (34)6.1.1.VoLTE话音模式 (34)6.1.2.CSFB话音模式 (35)6.1.3.TD-SCDMA/GSM模式 (35)6.1.4.双待话音模式 (35)6.2.话音业务 (36)6.2.1.话音模式转换 (36)6.2.2.话音连续性要求 (37)6.3.短信业务 (38)6.4.视频通话业务 (38)6.4.1.视频业务功能要求 (38)6.4.2.视频连续性要求 (39)6.5.补充业务 (39)6.5.1.补充业务要求及配置 (39)6.5.2.增强型多方通话要求 (41)6.5.3.补充业务配置接口要求 (43)6.6.数据业务 (44)6.6.1.关闭数据连接 (44)6.7.紧急呼叫 (44)6.8.彩印业务 (46)6.9.彩铃业务 (46)7.人机界面要求 (46)7.1.显示要求 (46)7.1.1.信号强度显示要求 (46)7.1.2.IMS状态显示要求 (46)7.2.配置要求 (47)7.2.1.话音优先级 (47)7.3.业务要求 (47)7.3.1.话音业务 (47)7.3.2.视频通话业务 (47)7.3.3.补充业务配置 (48)7.3.4.增强型多方通话 (49)8.性能要求 (49)8.1.VoLTE话音功耗 (49)8.2.VoLTE话音质量 (49)8.3.视频质量 (50)9.终端工作时长要求 (50)9.1.多小区环境下静止待机时间 (50)9.2.多小区环境下VoLTE静止通话时间 (50)9.3.多小区环境下静止视频通话时间 (51)9.4.多小区环境下静止数据业务通信时间 (51)10.接口要求 (51)11.AT接口指令 (51)12.可靠性要求 (52)12.1.电压 (52)12.2.其他可靠性要求 (52)13.电磁兼容要求 (52)14.比吸收率要求 (52)15.电池、充电器和接口要求 (53)15.1.电池 (53)15.2.充电器及接口特性 (53)16.编制历史 (54)附录A (IMS初始注册异常处理流程附录) (54)附录B (IMS重注册异常处理流程附录) (55)附录C (SilentRedial方案附录) (56)附录D (Delayed-TAU机制附录) (60)前言本标准对LTE/TD-SCDMA(TD-HSPA)/WCDMA(HSPA)/GSM(GPRS/EDGE)多模VoLTE 终端在技术方面的技术要素、技术特性进行了要求,确保LTE/TD-SCDMA(TD-HSPA)/WCDMA(HSPA)/GSM(GPRS/EDGE)多模VoLTE终端能够满足网络运营和业务开展的需求。
selfregistration error -回复
selfregistration error -回复self-registration error是指在自助注册过程中发生的错误。
自助注册是指用户可以通过填写表格或在网站上输入个人信息来创建一个新的账号或会员账号。
然而,在这个过程中可能会出现各种错误,从缺失数据到技术故障,都可能导致self-registration error的发生。
文章将从以下几个方面回答self-registration error的不同原因和对应的解决方法:第一部分:self-registration error的概述(100-200字)第二部分:常见的self-registration error(600-800字)2.1 缺失数据2.2 数据格式错误2.3 技术问题2.4 安全性问题第三部分:解决self-registration error的方法(600-800字)3.1 界面设计和指导3.2 数据验证和完整性检查3.3 技术支持和24小时在线帮助3.4 安全认证和防止欺诈行为第四部分:结论(100-200字)第一部分:self-registration error的概述在互联网时代,自助注册已经成为了用户创建新账号的主要方式之一。
然而,自助注册过程中常常会出现各种错误,使得用户无法成功注册。
这些错误可能是由于缺失数据、数据格式错误、技术问题以及安全性问题等导致的。
为了提高自助注册的效率和用户体验,解决self-registration error 变得尤为重要。
第二部分:常见的self-registration error2.1 缺失数据一个常见的self-registration error是用户在注册时漏掉了一些必填的数据。
这可能是因为用户没有注意到这些字段是必填的,或者是由于界面设计不友好而导致用户忽略了这些字段。
例如,许多注册表格中必须填写的字段包括姓名、邮箱地址和密码等。
当用户漏填了这些字段时,系统将无法成功注册账号。
Systems for continued verification in non-volatile

专利名称:Systems for continued verification in non-volatile memory write operations发明人:Jian Chen申请号:US11322001申请日:20051229公开号:US07352629B2公开日:20080401专利内容由知识产权出版社提供专利附图:摘要:Temporary lock-out is provided while programming a group of non-volatile memory cells to more accurately program the memory cells. After successfully verifying that the threshold voltage of a memory cell has reached the level for its intended state,it is possible that the threshold voltage will subsequently decrease to below the verify level during additional iterations of the programming process needed to complete programming of other memory cells of the group. Memory cells are monitored (e.g., after each iteration) to determine if they fall below the verify level after previously verifying that the target threshold voltage has been reached. Cells that pass verification and then subsequently fail verification can be subjected to further programming. For example, the bit line voltage for the memory cell of interest may be set to a moderately high voltage to slow down or reduce the amount of programming accomplished by each subsequent programming pulse. In this manner, a memory cell that falls out of verification can be placed back in the normal programming flow without risking over-programming of the cell.申请人:Jian Chen地址:San Jose CA US国籍:US代理机构:Vierra Magen Marcus & DeNiro LLP更多信息请下载全文后查看。
Verification checking system
专利名称:Verification checking system 发明人:John Kubina申请号:US05/789960申请日:19770425公开号:US04114140A公开日:19780912专利内容由知识产权出版社提供摘要:A system used to provide a verification check of a credit card or credit document includes a large capacity read/write memory having a single binary data bit stored at each address location. The credit card has unique identifying information encoded on it for addressing a specific location in the memory. A readout is provided in response to the insertion of the credit card to indicate whether the card is a valid one or not. To program the memory initially, a provision is made for individually addressing each of the different memory locations and to establish a "valid" or "non-valid" binary data bit storage at each location corresponding to a different credit card. In addition, manually operable addressing switches are provided to change the specific bit stored at any given address subsequent to the initial storage of data in the memory.申请人:ENGINEERED SYSTEMS, INC.代理机构:Weiss and Ptak更多信息请下载全文后查看。
captcha verification error

captcha verification errorCaptcha Verification Error: 什么是验证码验证错误?Captcha Verification Error是指在使用网络服务或应用程序时,出现的一个常见问题。
它通常会出现在需要用户输入验证码的情况下,如注册账号、提交表单等。
当用户输入的验证码与服务器所要求的不一致时,就会出现Captcha Verification Error。
在这篇文章中,我们将深入探讨Captcha Verification Error的原因、解决方法以及如何避免它。
一、Captcha Verification Error的原因1.1 验证码本身存在问题有时候,验证码本身就存在问题。
可能是由于服务器出错或者是由于网络连接不稳定导致的。
这种情况下,我们可以尝试重新加载页面或者更换浏览器再试一次。
1.2 用户输入错误另外一个常见原因是用户输入错误。
当用户无法正确识别验证码上的字符或数字时,他们可能会多次尝试并最终输错了验证码。
这种情况下,我们可以尝试刷新页面并再次输入正确的验证码。
1.3 网络连接问题有时候网络连接不稳定也会导致Captcha Verification Error。
当网络连接不稳定时,数据传输可能会受到干扰或丢失,从而导致无法正确验证验证码。
这种情况下,我们可以尝试重新启动路由器或更换网络环境,然后再次尝试。
1.4 服务器问题最后一个可能的原因是服务器出现问题。
当服务器出现故障或者负载过重时,它可能无法正确处理验证码验证请求。
这种情况下,我们可以尝试等待一段时间,然后再次尝试。
二、Captcha Verification Error的解决方法2.1 刷新页面并重新输入验证码当遇到Captcha Verification Error时,最简单的解决方法是刷新页面并重新输入验证码。
这通常可以解决由于网络连接问题或用户输入错误导致的问题。
2.2 更换浏览器或设备有时候,Captcha Verification Error可能与特定浏览器或设备有关。
Centralized monitor

专利名称:Centralized monitor发明人:新保 邦光申请号:JP実願平3-75624申请日:19910827公开号:JP実開平5-21580U公开日:19930319专利内容由知识产权出版社提供专利附图:摘要:(57)< Abstract > < Objective >In the centralized monitoring system, routine inspection and breakdown learning/repairingWhen doing the system operationverification after the reason, in the monitoring system, attachingTo add being attached performance, with inspection operation verification breakdown log, rotsukiThere aretimes when the function which suppresses ngu output can be given. < Constitution >To divide the monitored device into functional block, each blockConfigurating while inspecting whether in the unit with CRT and the keyboard on streamIt is while block in the block unit which it does, while inspecting is configuratedThe Various equipment the operation verification which includes the trouble-signal in display on CRTWithout leaving to record do, as a breakdown log, at the same time alarmIn order not to output the signal, way it is possible to configurate, configurationIt is something which it does.申请人:東洋電機製造株式会社地址:東京都中央区八重洲2丁目7番2号国籍:JP更多信息请下载全文后查看。
systemverilog for verification 3 源代码 -回复
systemverilog for verification 3 源代码-回复SystemVerilog is an extension to the popular hardware description language, Verilog, specifically designed for verification purposes in the field of digital design. With the increasing complexities of modern hardware designs, the need for sophisticated verification methodologies has become vital. SystemVerilog addresses these challenges by introducing powerful features that enhance the verification capabilities of Verilog. In this article, we will explore some of these features and understand their significance in the verification process.1. Classes and Objects:One of the most important features introduced in SystemVerilog is the object-oriented programming paradigm. SystemVerilog allows the creation of classes and objects, enabling the verification engineer to model the functionality and behavior of a design component more accurately. By encapsulating data and functions within a class, the engineer can create reusable verification components and enhance the testbench structure. Objects can be instantiated from these classes, facilitating modular and scalable verification environments.2. Randomization:SystemVerilog provides built-in randomization features that simplify the creation of random test stimuli, aiding in better verification coverage. Randomization allows the verification engineer to avoid tedious manual stimulus creation and instead generate a diversified set of test cases automatically. The language provides constructs such as `rand` and `randc`, which help in generating random variables and random case statements, respectively. Randomization is a powerful technique that helps in finding corner cases and exposes potential design weaknesses.3. Constraint Random Verification (CRV):To achieve specific design corner cases, the SystemVerilog constraint random verification methodology is widely employed. This methodology takes advantage of randomization but introduces constraints to guide the randomization process. Constraints allow the verification engineer to restrict the randomization space and focus on specific scenarios of interest. For example, if a designer wants to verify specific values of inputs, constraints can be applied to generate those exact values. CRV adds a layer of controllability to randomization, making it more efficient in exploring the design space.4. Functional Coverage:Functional coverage is a metric used to measure the completeness of testing. It determines whether all functional aspects of the design have been exercised during the verification process. Functional coverage is crucial in identifying untested design behaviors and verifying that the testbench has achieved the desired verification goals. SystemVerilog provides a native functional coverage feature, where the verification engineer can specify covergroups to capture specific design properties. These covergroups collect coverage information during simulation, allowing the engineer to track and analyze the verification progress.5. Assertions:SystemVerilog supports assertions, enabling the verification engineer to formalize design properties and check them dynamically during simulation. Assertions provide a mechanism to declare and verify conditions in the design, which can be used to detect potential bugs or violations of intended behavior. The language offers several types of assertions, including immediate assertions and concurrent assertions, making it a powerful tool forformal verification purposes.6. Interoperability with C/C++:In addition to hardware verification, SystemVerilog also supports interoperability with C/C++. This enables the verification engineer to incorporate C/C++ constructs within the testbench, facilitating the integration of software-based test scenarios. It allows the reuse of existing C/C++ code and libraries, enhancing the verification process by providing an environment for both hardware and software co-verification.7. UVM (Universal Verification Methodology):SystemVerilog is the backbone of the Universal Verification Methodology (UVM), a standardized methodology widely used in the industry for verifying complex designs. UVM provides a set of guidelines and libraries built on top of SystemVerilog, enabling engineers to create reusable, scalable, and modular verification environments. Its components, such as sequences, transactions, and testbenches, are designed using SystemVerilog constructs and enable significant improvements in verification productivity.In conclusion, SystemVerilog for verification provides a powerfulset of features and methodologies to address the challenges of modern digital design verification. Through the use of classes, randomization, constraint random verification, functional coverage, assertions, interoperability with C/C++, and UVM, engineers can create robust verification environments to ensure the correctness and reliability of complex hardware designs. SystemVerilog brings a significant advancement in verification techniques and plays a crucial role in the success of hardware development projects.。
authorizationverificationr -回复

authorizationverificationr -回复授权验证是指在计算机科学和信息技术领域中,用于确认用户身份及其权限的过程。
它起源于计算机安全领域中,旨在确保只有经过授权的用户可以访问系统资源和数据。
授权验证机制的实施对于保护用户信息、减少安全风险以及提高系统可靠性至关重要。
在本文中,我们将一步一步地介绍授权验证的概念、原则、常见的实施方法以及相关的挑战和解决方案。
第一步:什么是授权验证?授权验证是指通过验证和确认用户身份和权限,判断其是否有权访问系统资源和数据的过程。
它是系统安全性的基础,可以防止未经许可的访问和潜在的数据泄露。
第二步:授权验证的原则实施授权验证时,遵循以下几个原则是至关重要的:1. 最小权限原则:每个用户只能获得完成其任务所需的最低权限。
这样可以最大限度地减少安全风险,并防止潜在的系统滥用。
2. 多因素身份验证:采用多种验证方法,例如用户名/密码组合、指纹识别、智能卡等,以确保用户的身份得到充分验证。
这可以防止恶意用户利用弱密码或窃取他人的凭证进行未经授权的访问。
3. 访问日志记录:详细记录所有用户的访问活动,并存储在安全的地方。
这样可以帮助系统管理员监控和追踪用户活动,及时发现异常行为和潜在的安全威胁。
第三步:常见的授权验证方法在实际应用中,有多种方法可以实现授权验证,下面列举了常见的几种方法:1. 用户名/密码验证:用户提供用户名和相应的密码进行身份验证,这是最常见的方法之一。
然而,弱密码和密码泄露等问题使得这种方法相对容易受到攻击。
2. 双因素身份验证:将用户名/密码验证与另外一种身份验证因素相结合,例如使用短信验证码、指纹识别或智能卡等。
这种方法提供了更高的安全性,增加了攻击者攻击的难度。
3. 单点登录(SSO):通过在多个系统之间共享登录凭证,用户只需一次登录即可访问多个系统。
这可以简化用户体验,减少密码管理的负担,并提高系统安全性。
第四步:授权验证的挑战和解决方案尽管授权验证是系统安全的关键组成部分,但它也会面临一些挑战。
invalid system configuration error code

invalid system configuration error code全文共四篇示例,供读者参考第一篇示例:在使用计算机的过程中,我们有时会遇到一些错误提示,比如“invalid system configuration error code”(无效的系统配置错误代码)。
这个错误代码表示系统配置出现了问题,导致计算机无法正常运行。
在遇到这种问题时,我们需要及时进行处理,以避免影响计算机的正常使用。
我们要先了解一下什么是系统配置。
系统配置是指计算机硬件和软件的各种参数设置,包括操作系统、驱动程序、网络配置等。
系统配置的正确与否直接影响着计算机的稳定性和性能。
当系统配置出现问题时,就会出现“invalid system configuration error code”这样的错误提示。
造成系统配置错误的原因有很多,比如安装了不兼容的软件、硬件故障、系统文件损坏等。
在遇到这种错误时,我们可以尝试以下几种方法来解决问题:1.重新启动计算机。
有时候只需要简单地重新启动计算机就可以解决一些系统配置错误。
重启后,系统会重新加载配置,有可能会恢复正常。
2.检查硬件设备。
有时候硬件设备的故障会导致系统配置错误。
我们可以检查一下硬件设备是否连接正常,是否有损坏,及时更换或修复故障设备。
3.卸载不兼容的软件。
有些软件不兼容系统,会导致系统配置错误。
我们可以尝试卸载这些软件,或更新它们的版本来解决问题。
4.更新系统补丁。
有时候系统配置错误是由于系统文件损坏引起的,我们可以尝试安装最新的系统补丁来修复这些文件,以恢复系统正常。
5.恢复系统配置。
如果以上方法都无效,我们可以尝试恢复系统配置到之前的正常状态。
可以通过系统还原、重装系统等方法来恢复系统配置。
第二篇示例:无效的系统配置错误代码是指在计算机系统中发生的一种错误,通常会导致系统无法正常运行或执行特定的操作。
这种错误代码可能会出现在操作系统、应用程序或硬件设备中,可能会对用户造成困扰。
authorizationverificationr -回复

authorizationverificationr -回复什么是认证和验证?为什么在信息技术领域中,认证和验证是如此重要?认证和验证是信息技术领域中常用的两个术语。
它们在确保系统和数据的安全性方面扮演着重要角色。
本文将逐步回答什么是认证和验证,并探讨它们在信息技术领域中的重要性。
首先,我们来理解认证是什么。
认证是一个过程,通过该过程来确认一个实体(如用户、系统、组织等)的身份和权利。
在计算机系统中,认证通常用于确认用户的身份和授权用户访问特定的资源。
认证过程依赖于识别和验证用户的身份信息,如用户名和密码、生物特征(如指纹、面部识别等)或硬件标识(如安全令牌、智能卡等)。
验证是另一个相关的概念,它是确认一个系统或数据的完整性和可靠性的过程。
验证确保系统和数据在操作过程中的一致性,以及与预期结果的符合度。
验证过程通常使用各种算法和方法,如哈希函数、数字签名等,来验证数据的完整性和真实性。
现在我们来谈谈为什么认证和验证在信息技术领域中如此重要。
首先,认证和验证保证了系统和数据的安全性。
通过确认用户的身份并限制其访问特定资源,认证确保只有授权用户才能访问敏感信息。
而验证则确保数据在传输和存储过程中没有被篡改或损坏,从而保证数据的完整性和可靠性。
其次,认证和验证有助于防止未经授权的访问和欺诈行为。
在互联网时代,保护个人和敏感信息的安全性成为了一项重要任务。
通过认证用户的身份,并验证其权限,可以防止黑客和恶意用户从系统中窃取敏感信息或进行欺诈活动。
此外,认证和验证有助于确保合规性。
在一些行业中,特定的法规和标准要求必须满足信息安全和数据保护的要求。
通过实施有效的认证和验证措施,可以确保系统和数据符合相关的法规和标准,从而避免潜在的法律风险。
最后,认证和验证有助于建立信任。
在数字化时代,建立信任是商业成功的关键因素之一。
通过有效的认证和验证过程,企业可以向用户和合作伙伴证明其系统和数据的可信度。
这将有助于吸引用户,增加交易的安全性,并建立长期的合作关系。
路由器用户手册.pdf_1702096606.4917393说明书
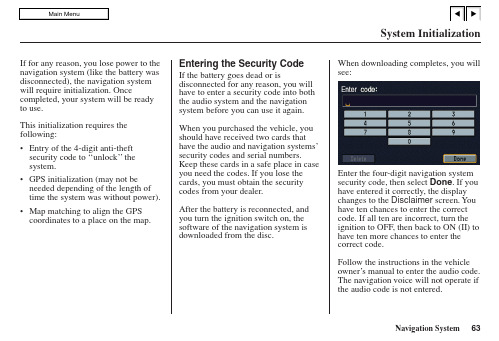
System InitializationIf for any reason, you lose power to the navigation system (like the battery was disconnected), the navigation system will require initialization. Once completed, your system will be ready to use.This initialization requires the following:•Entry of the 4-digit anti-theft security code to ‘‘unlock’’ the system.•GPS initialization (may not be needed depending of the length of time the system was without power).•Map matching to align the GPS coordinates to a place on the map.Entering the Security CodeIf the battery goes dead or isdisconnected for any reason, you willhave to enter a security code into boththe audio system and the navigationsystem before you can use it again.When you purchased the vehicle, youshould have received two cards thathave the audio and navigation systems’security codes and serial numbers.Keep these cards in a safe place in caseyou need the codes. If you lose thecards, you must obtain the securitycodes from your dealer.After the battery is reconnected, andyou turn the ignition switch on, thesoftware of the navigation system isdownloaded from the disc.When downloading completes, you willsee:Enter the four-digit navigation systemsecurity code, then select Done. If youhave entered it correctly, the displaychanges to the Disclaimer screen. Youhave ten chances to enter the correctcode. If all ten are incorrect, turn theignition to OFF, then back to ON (II) tohave ten more chances to enter thecorrect code.Follow the instructions in the vehicleowner’s manual to enter the audio code.The navigation voice will not operate ifthe audio code is not entered.System InitializationGPS Initialization Depending on the length of time the battery was disconnected, your system may require GPS initialization. If itdoes, the following screen appears:If this procedure is not necessary the system proceeds directly to the Disclaimer screen (see page 15).During initialization, the system searches for all available GPS satellites,and obtains their orbital information.During this procedure the vehicle should be out in the open with a clear view of the sky.If the navigation system finds the satellites properly, this box clears, and changes to theDisclaimer screen. If within ten minutes the system fails to locate a sufficient number of satellites to locate your position, the following screen appears:Navigation system is unable to acquire aproper GPS signal.- Move vehicle to another location- Turn the ignition switch off- Disconnect the battery for 30 minutes to clear the GPS receiverís memory- Reconnect the battery and followthe screen promptsAfter 30 minutes with this screen displayed, turn off the engine and restart the car. If you now see the Disclaimerscreen, the GPS initialization is complete.NOTE:•The average acquiring time is less than 10 minutes, but it can take as long as 45 minutes.•If the system is still unable to acquire a signal, follow the instructions onthe screen, or contact your local dealer for assistance.Map Matching This part of the initialization matches the GPS coordinates found above with a road on the map screen. To perform this part of the procedure, ensure that the navigation system is displaying a map, and drive the vehicle on a mapped road (a road shown on the map screen).Do not enter a destination at this time.When the name of the current road you are driving on, appears at the bottom of the screen, the entire procedure is complete. Your system is now ready to use.System LimitationsAlthough your navigation system is one of the most highly sophisticated pieces of equipment you will find in a modern automobile, you may find during its use that it has certain limitations.The system uses signals from the Global Positioning System (GPS) to aid in determining its current location.The GPS is operated by the U.S. Department of Defense. For security reasons, there are certain inaccuracies built into the GPS that the navigation system must constantly compensate for. This can cause occasional positioning errors of up to several hundred feet. For example, in urban areas where streets are close together, this could cause the system to show that you are traveling on a street that parallels the street you are actually on.The system will, under most circumstances, correct itself while you drive.Also, depending on your current viewof the sky and the position of thesatellites, the elevation may be shownincorrectly.You may also notice somedelay of the vehicle position icon atintersections; this is normal.Although the system will direct you toyour desired destination, it may notalways generate what you consider tobe the most direct route.Try changingthe method of routing. See ChangeMethod on page 33.You may also haveUnverified Routing set to “OFF.” SeeUnverified Routing under SystemSet-up on page 61.Additionally, the mapping databasecontains verified and unverified maps.See Map Overview on page 4. Adisclaimer screen will warn you if yourroute includes unverified streets.Unverified streets may be missing fromthe map, in the wrong location, or havean incorrect name or address range.Exercise additional caution whendriving in these unverified areas.The destination icon shows theapproximate location of the destination.This happens because a city block canhave as many as 100 possible addresses(for example, the 1400 block isfollowed by the 1500 block.) Sincemost cities use only a portion of the100 possible addresses (for example, inthe 1400 block, the addresses may onlygo up to 1430 before the 1500 blockstarts), an address if 1425 will beshown a quarter of the way down theblock by the system instead of near theend of the block where the distinationactually is.You may find that the systemoccasionally “reboots.” This isindicated by the display returning to thelogo screen. A reboot can be caused bya number of things, such as extremetemperatures or shock from bumpyroads. It does not necessarily indicate aproblem that requires service. If thishappens frequently, please see yourdealer.Database LimitationsYou will find that some points of interest (POI) may be missing when you search the database. This can be caused if at the time the database was gathered, the name was misspelled, the place was improperly categorized, or the POI change is not yet in the database. This means you may not find places listed that you know exist. This is also true for police agencies and hospitals. In outlying areas, facilities listed may not be the closest. Always check with local information sources if you need law enforcement or hospital services.Every effort has been made to verify that the system’s database was accurate at the time it was created. However, businesses do fail or move to new locations, and new businesses start in the old locations. For this reason, you may occasionally find “inaccurate”information when you select and drive to a point of interest (for example, a restaurant is now a jewelry store). The number of these inaccuracies increases the longer you go without an update.The digitized map database reflectsconditions as they existed at variouspoints in time before production.Accordingly, your DVD may containinaccurate or incomplete data orinformation due to the passage of time,road construction, changing conditions,or other causes.In addition, this database does notinclude, analyze, process, consider, orreflect any of the following categoriesof information:•Neighborhood quality or safety•Population density•Availability or proximity of lawenforcement•Emergency, rescue, medical, or otherassistance•Construction work, zones, or hazards•Road and lane closures•Legal restrictions (such as vehiculartype, weight, load, height, and speedrestrictions)•Road slope or grade•Bridge height, width, weight, orother limits•Road, traffic or traffic facilitiessafety, or conditions•Weather conditions•Special events•Pavement characteristics orconditions•Traffic congestion•Travel timeWe assume no liability for any incidentthat may result from an error in theprogram, or from changed conditionsnot noted above.。
geetest validate error
"Geetest validate error" 是一个常见的错误提示,通常在使用极验验证码时出现。
这个错误的意思是验证码验证失败或无效。
出现这个错误的原因可能有很多,例如网络连接问题、验证码过期、输入错误等。
解决这个错误的方法可能包括:
检查网络连接:确保您的网络连接稳定并且正常工作。
如果网络不稳定或存在延迟,验证码的验证请求可能无法顺利发送或接收,从而导致验证失败。
检查验证码的有效期:验证码通常有一个有效期,如果超过了有效期,验证码就会失效。
确保在有效期内完成验证操作。
确保输入正确:在输入验证码时,请确保没有输入错误或遗漏字符。
同时,也要注意区分大小写字母和数字。
刷新页面或重新获取验证码:如果以上方法都没有解决问题,您可以尝试刷新页面或重新获取验证码,然后再次进行验证操作。
如果您仍然无法解决问题,建议您联系极验客服寻求帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(
(51)International Patent Classification:AO,AT,AU,AZ,BA,BB,BG,BH,BN,BR,BW,BY,BZ,
G01P3/64(2006.01)G01P3/50(2006.01)CA,CH,CL,CN,CO,CR,CU,CZ,DE,DJ,DK,DM,DO, G01P21/02(2006.01)DZ,EC,EE,EG,ES,FI,GB,GD,GE,GH,GM,GT,HN,
HR,HU,ID,IL,IN,IR,IS,JO,JP,KE,KG,KH,KN,KP, (21)International Application Number:
KR,KW,KZ,LA,LC,LK,LR,LS,LU,LY,MA,MD,ME,
PCT/US2019/026291
MG,MK,MN,MW,MX,MY,MZ,NA,NG,NI,NO,NZ, (22)International Filing Date:OM,PA,PE,PG,PH,PL,PT,QA,RO,RS,RU,RW,SA,
08April2019(08.04.2019)SC,SD,SE,SG,SK,SL,SM,ST,SV,SY,TH,TJ,TM,TN,
TR,TT,TZ,UA,UG,US,UZ,VC,VN,ZA,ZM,ZW. (25)Filing Language:English
(84)Designated States(unless otherwise indicated,for every (26)Publication Language:English kind o f regional protection available).ARIPO(BW,GH,
(30)Priority Data:GM,KE,LR,LS,MW,MZ,NA,RW,SD,SL,ST,SZ,TZ,
16/023,03629June2018(29.06.2018)US UG,ZM,ZW),Eurasian(AM,AZ,BY,KG,KZ,RU,TJ,
TM),European(AL,AT,BE,BG,CH,CY,CZ,DE,DK, (71)Applicant:ILLINOIS TOOL WORKS INC.[US/US];EE,ES,FI,FR,GB,GR,HR,HU,IE,IS,IT,LT,LU,LV,
155Harlem Avenue,Glenview,IL60025(US).MC,MK,MT,NL,NO,PL,PT,RO,RS,SE,SI,SK,SM, (72)Inventor;and TR),OAPI(BF,BJ,CF,CG,Cl,CM,GA,GN,GQ,GW, (71)Applicant(for US only):O'DONOVAN,James, C.KM,ML,MR,NE,SN,TD,TG).
[US/US];d o Illinois Tool works Inc.,155Harlem Avenue,
Glenview,IL60025(US).Published:
—with international search report(Art.21(3))
(74)Agent:BROWN,Ronald;McCarter&English,LLP,825
Eighth Avenue,New York,NY10019(US).
(81)Designated States(unless otherwise indicated,for every
kind o f national protection available):AE,AG,AL,AM,
(54)Title:SYSTEM FOR VERIFICATION OF TESTING MACHINE SPEED
(57)Abstract:The present disclosure relates to a system for verification of the speed of crosshead travel in a materials testing device.
A linear displacement device is mounted on the crosshead of the materials testing device.The linear displacement device measures the position and displacement of the crosshead during the test.A timer interval counter measures the time of travel of the crosshead during the test.This measurements allow for accurate calculation of the average speed of the crosshead travel,based on the difference between the position values divided by the elapsed time.
PCT APPLICATION
SYSTEM FOR VERIFICATION OF TESTING MACHINE SPEED
Applicant:Illinois Tool Works Inc.
BACKGROUND OF THE DISCLOSURE
[0001]This application claims priority under35U.S.C.§119(e)of U.S.Application serial no.16/023,036filed on June29,2018,the contents of which are hereby incorporated by reference in their entirety and for all purposes.
Field of the Disclosure
[0002]The present disclosure relates to a system for verification of the speed of crosshead travel in a materials testing device.
Description of the Prior Art
[0003]In the prior art,it is known that material testing,such as,bu no limited to stress/strain analysis pursuant to ASTM E2658,requires repeatable and predictable testing machine speed.The devices used for measurement of machine speed may be used for measurement of crosshead speed.The accuracy of the crosshead speed value is imperative for the accuracy of the materials testing results.
OBJECTS AND SUMMARY OF THE DISCLOSURE
[0004]It is therefore an object of the present disclosure to provide for improved calculation and verification of the speed of a crosshead in a materials testing device.
This and other objects are attained by verification of crosshead travel by measuring the distance the crosshead travels over a period of time.A time internal counter is used in combination with a。