导向滤波论文翻译
中文翻译
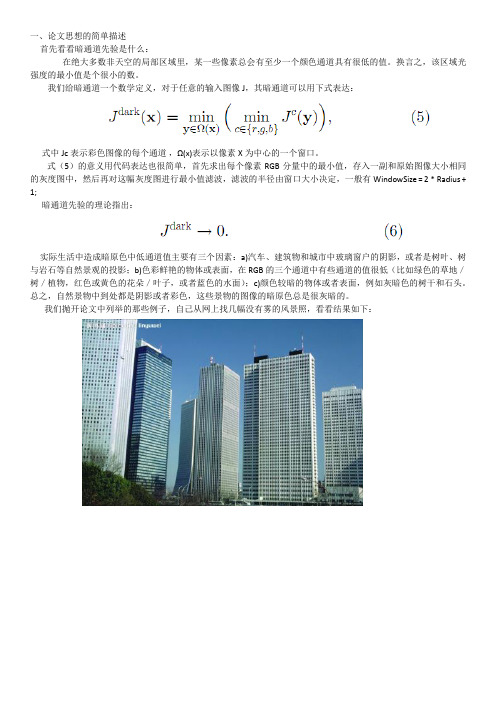
一、论文思想的简单描述首先看看暗通道先验是什么:在绝大多数非天空的局部区域里,某一些像素总会有至少一个颜色通道具有很低的值。
换言之,该区域光强度的最小值是个很小的数。
我们给暗通道一个数学定义,对于任意的输入图像J,其暗通道可以用下式表达:式中Jc表示彩色图像的每个通道,Ω(x)表示以像素X为中心的一个窗口。
式(5)的意义用代码表达也很简单,首先求出每个像素RGB分量中的最小值,存入一副和原始图像大小相同的灰度图中,然后再对这幅灰度图进行最小值滤波,滤波的半径由窗口大小决定,一般有WindowSize = 2 * Radius + 1;暗通道先验的理论指出:实际生活中造成暗原色中低通道值主要有三个因素:a)汽车、建筑物和城市中玻璃窗户的阴影,或者是树叶、树与岩石等自然景观的投影;b)色彩鲜艳的物体或表面,在RGB的三个通道中有些通道的值很低(比如绿色的草地/树/植物,红色或黄色的花朵/叶子,或者蓝色的水面);c)颜色较暗的物体或者表面,例如灰暗色的树干和石头。
总之,自然景物中到处都是阴影或者彩色,这些景物的图像的暗原色总是很灰暗的。
我们抛开论文中列举的那些例子,自己从网上找几幅没有雾的风景照,看看结果如下:一些无雾的图片其暗通道在看看一些有雾的图的暗通道:一些有雾的图片其暗通道上述暗通道图像均使用的窗口大小为15*15,即最小值滤波的半径为7像素。
由上述几幅图像,可以明显的看到暗通道先验理论的普遍性。
在作者的论文中,统计了5000多副图像的特征,也都基本符合这个先验,因此,我们可以认为其实一条定理。
有了这个先验,接着就需要进行一些数学方面的推导来最终解决问题。
首先,在计算机视觉和计算机图形中,下述方程所描述的雾图形成模型被广泛使用:其中,I(X)就是我们现在已经有的图像(待去雾的图像),J(x)是我们要恢复的无雾的图像,A是全球大气光成分,t(x)为透射率。
现在的已知条件就是I(X),要求目标值J(x),显然,这是个有无数解的方程,因此,就需要一些先验了。
中值滤波器脉冲噪声中英文对照外文翻译文献
中英文资料外文翻译文献Improved 2-D Median Filter for On-Line Impulse Noise Suppressiom Abstract-An inproved 2-D median filter employing multishell concept to suppress impulse noise ,is presented.The performance of proposed filter is evaluated over image ‘LENA’,The impulsive noise is added using MATLAB utility.The modified strategy reduces the mnuber of replacement and results in better performance and simple hardware realization that is suitable for on-line implementation.Index terms-Median Filter , Multi-shell Median Filter, Impulse NoiseI.INTRODUCTIONIn TV and other imaging systems,impulse noise is a common impairment . The standard T.V.Broadcast signal is often contaminated with impulsive noise arising from various sources such as household electrical appliance and atmospheric disturbances.Broad banding of the signal further increases the level of impulsive noise. V arious filters are proposed to suppress such impairments[1].The median filter(MF)[1-2] is widely usedfor impulse noise suppression and the multishell median filter(MMF)[3] introduces the concept of missing line recovery. Although these filters have satisfactory performance, MMF failsto filter two impulse noises in the same prossing window. Moveover,these filters tend to blur the images due to too many replacements. C.J.Juan proposed a modified multishell median filter (MMMF)[4], which removes most of the shortcomings associated with the MF and the MMF. However, it is observed that under certain condions, to be discussed in the follow sections, MMMF fails to perform the desired filtering operation .Moreover,the number of calculations/replacements invoved on the basis of MIN/MAX conditions is still too large and makes the filter difficult to realize,particulariy for real time applications.In this paper, the threshold strtegy of MMMF is modified so that:(a)effective noise filtering operations are performed under allconditions,and(b)number of calculations/replacements is reduced and simplified. This results in a simple hardware realization of the filter.II.PROPOSED MODIFICATIONConsider a 3x3-processing window, with P5 as the central pixel,as shown in Figure 1.P1 P2 P3P4 P5 P6P7 P8 P9Fig.1. A 3x3 processing windowThe output of MMMF as proposed in [4] isOutput (X,Y)= Max(P2,P8)if P5﹥Max[S]P5 if Min [s]﹤Max[S]Min(P2,P8) if P5﹤Max[S] (1)Where S is the set of samples surrounding central pixels except(P4.P6)i.e.S={P1,P2,P3,P7,P8,P9} (2) The principle invoved in the replacement strategy of Equation(1) is that if P5 is corrupted by noise ,it is better to replaceits gray level by P2 or P8 than by using Min[S] orMax[S] .also,due to missing lines error,since P4 and P6 may belost, they are not considered in Equation(2).The limitation of Equation(1) is that when Min[S] or Max[S] arealso corrupted by impulse noise,i.e.either Min[S] or Max[S] isequal to P5,Equation(1)fails to perform the desired filtering operation.To overcome this limitation following modificationsin the replacement strategy of Equation(1),are proposed.Output (X,Y)= Max(P2,P8)if P5≥Max[S]P5 if Min [s]<P5<Max[S] Min(P2,P8) if P5≤Max[S] (3)It has been observed that more than 70-80% points in an image,the gray level diatances of P5 from(P2 or P8) and from Max[S] are below 16.This is shown in Fig.2 for the image ‘LENA’.This fact is used to further reduce unnessary replacements,thereby reducing the bluring of the images.Thus taking into considertion of Figure(3) can be further modified asOutput (X,Y)= Max(P2,P8)if P5-Max[S]≥16Max(P2,P8) if Min [s]-P5≥16P5 otherwise (4)Equation 4 indicates that replacing action takes place only when the distance between P5 and Min[S] or Max[S] is no smaller than 16. This strtegy thus avoids the necessary replacements and reduces blurring of the images.Moreover,it can be implemented using simple comparators and subtractors.Gray level distancesFig.2. Gray level distances between central point and its neighboring points for the image ‘LENNA’Ⅲ .RESULTSFigure 3 shows the original image ‘LENNA’and Figure 4 shows the same image when corrupted with impulse noise. Results of median filter and the proposed filter are given in Figures 5 and 6, paring Figures 5 and 6, it is observed that the result of the proposed filter is much better than those obtained using the median filter. Aithough,the median filter remove the impulsive moise effectively, however,the image gets blurred.The proposed filter removes the impulsive noise and also preserves the details of the image.A multishell filter employing the modified replacement strategy is presentde in this paper.The modified filter effectively suppresses the inpulse moise.It uses threshold conditions that require fewer comparisons and replacements and is faster as compared to the other multishell median filters.moreover,it can be realized using simple comparators and subtractors and subtractors and hence can be effectively used in real time applications改进二维中值滤波器在线脉冲噪声的抑制摘要:一种改进二维中值滤波器,采用多壳的概念,以抑制脉冲噪声,拟定的过滤器的性能进行评估超过图像“LENNA”的中值滤波,脉冲噪声被添加使用到MATLAB的实用工具中。
DSP滤波器中英文对照外文翻译文献
中英文对照外文翻译文献(文档含英文原文和中文翻译)译文:GA算法优化IIR滤波器的设计摘要本文提出了运用遗传算法(GA)来优化无限脉冲响应数字滤波器(IIR)的设计。
IIR滤波器本质上是一个递归响应的数字滤波器。
由于IIR 数字滤波器的表面误差通常是非线性的和多峰的,而全局优化技术需要避免局部最小值。
本文提出了启发式方式来设计IIR滤波器。
GA是组合优化问题中一种功能强大的全局优化算法,该论文发现IIR数字滤波器的最佳系数可以通过GA 优化。
该设计提出低通和高通IIR数字滤波器的设计,以提供过渡频带的估计值。
结果发现,所计算出的值比可用于过滤器的在MATLAB设计FDA工具更优化。
举个例子,采用的仿真结果表明在过渡带和均方误差(MSE)的改善。
零极点的位置也被提出来用来描述系统的的稳定性,以便将结果与模拟退火(SA)的方法相比较。
关键词:数字滤波器;无限冲激响应(IIR);遗传算法(GA);优化1.说明在过去的几十年中的数字信号处理(DSP)领域已经成长太重要的理论和技术。
在DSP中,有两个重要的类型系统。
第一类型的系统是执行信号滤波的时域,因此它被称为数字滤波器。
第二类型的系统提供的信号表示频域,被称为频谱分析仪。
数字滤波是DSP的最有力的工具之一。
数字滤波器能够性能规格,最好的同时也是极其困难的,而且不可能的是,先用模拟滤波器实现。
另外,数字滤波器的特性,可以很容易地在软件控制下发生变化。
数字滤波器被分类为有限持续时间脉冲响应(FIR)滤波器或无限持续时间脉冲响应(IIR)滤波器,这取决于该系统的脉冲响应的形式。
在FIR系统中,脉冲响应序列是有限的持续时间,即,它具有非零项的数量有限。
数字无限脉冲响应(IIR)滤波器通常可以提供比其等效有限脉冲响应(FIR)滤波器更好的性能和更少的计算成本,并已成为越来越感兴趣的目标。
但是,由于IIR滤波器的误差表面通常是非线性的,多式联运,传统的基于梯度的设计方法可以很容易地陷入错误的表面。
图像引导滤波—中文
图像引导滤波—中文摘要:这篇文章中,我们提出一个新颖的显式图像滤波器称为引导过滤器。
起源于一个局部的线性模型,指导滤波器通过考虑指导图像的内容计算滤波输出,这种滤波器可以输入图像本身或另一个不同的形象。
引导过滤器可以像流行的双边滤波器[1]一样作为edge-preserving平滑算子,但它具有更好的边缘附近的效果。
引导滤波器也是一个超越平滑的更一般的概念:它可以将指导图像的结构转化为滤波输出,使新的过滤应用程序像图像去雾和引导羽化一样。
此外,无论要点大小和强度范围,引导自然过滤器有一个快速和非近似线性时间算法。
目前,这是一个最快的edge-preserving过滤器。
实验表明,引导滤波器是在多种多样的计算机视觉和计算机图形学的应用都可以起作用的和有效率滤波器,包括边缘感知平滑、细节增强,HDR压缩,图像消光/羽化、去雾、联合采样等等。
关键词:边缘保持滤波,双边滤波器,线性时间过滤1简介在计算机视觉和计算机图形学大多数应用涉及到图像滤波,以抑制和/或提取的图像内容。
简单的线性平移不变(LTI)滤波器具有明确的内核,诸如均值(均值滤波是典型的线性滤波算法,它是指在图像上对目标像素给一个模板,该模板包括了其周围的临近像素(以目标象素为中心的周围8个像素,构成一个滤波模板,即去掉目标像素本身),再用模板中的全体像素的平均值来代替原来像素值。
概述:均值滤波也称为线性滤波,其采用的主要方法为邻域平均法。
线性滤波的基本原理是用均值代替原图像中的各个像素值,即对待处理的当前像素点(x,y),选择一个模板,该模板由其近邻的若干像素组成,求模板中所有像素的均值,再把该均值赋予当前像素点(x,y),作为处理后图像在该点上的灰度个g(x,y),即个g(x,y)=1/m ∑f(x,y)m为该模板中包含当前像素在内的像素总个数。
不足:均值滤波本身存在着固有的缺陷,即它不能很好地保护图像细节,在图像去噪的同时也破坏了图像的细节部分,从而使图像变得模糊,不能很好地去除噪声点。
数字滤波器文献翻译

文献翻译外文:Digital filterIn electronics, computer science and mathematics, a digital filter is a system that performs mathematical operations on a sampled, discrete-time signal to reduce or enhance certain aspects of that signal. This is in contrast to the other major type of electronic filter, the analog filter, which is an electronic circuit operating on continuous-time analog signals. An analog signal may be processed by a digital filter by first being digitized and represented as a sequence of numbers, then manipulated mathematically, and then reconstructed as a new analog signal (see digital signal processing). In an analog filter, the input signal is "directly" manipulated by the circuit.A digital filter system usually consists of an analog-to-digital converter to sample the input signal, followed by a microprocessor and some peripheral components such as memory to store data and filter coefficients etc. Finally a digital-to-analog converter to complete the output stage. Program Instructions (software) running on the microprocessor implement the digital filter by performing the necessary mathematical operations on the numbers received from the ADC. In some high performance applications, an FPGA or ASIC is used instead of a general purpose microprocessor, or a specialized DSP with specific paralleled architecture for expediting operations such as filtering.Digital filters may be more expensive than an equivalent analog filter due to their increased complexity, but they make practical many designs that are impractical or impossible as analog filters. Since digital filters use a sampling process and discrete-time processing, theyexperience latency (the difference in time between the input and the response), which is almost irrelevant in analog filters.Digital filters are commonplace and an essential element of everyday electronics such as radios, cellphones, and stereo receivers.Characterization of digital filtersA digital filter is characterized by its transfer function, or equivalently, its difference equation. Mathematical analysis of the transfer function can describe how it will respond to any input. As such, designing a filter consists of developing specifications appropriate to the problem (for example, a second-order low pass filter with a specific cut-off frequency), and then producing a transfer function which meets the specifications.The transfer function for a linear, time-invariant, digital filter can be expressed as a transfer function in the Z-domain; if it is causal, then it has the form:where the order of the filter is the greater of N or M. See Z-transform's LCCD equation for further discussion of this transfer function.This is the form for a recursive filter with both the inputs (Numerator) and outputs (Denominator), which typically leads to an IIR infinite impulse response behaviour, but if the denominator is made equal to unity i.e. no feedback, then this becomes an FIR or finite impulse response filter.Analysis techniquesA variety of mathematical techniques may be employed to analyze the behaviour of a given digital filter. Many of these analysis techniques may also be employed in designs, and often form the basis of a filter specification.Typically, one analyzes filters by calculating how the filter will respond to a simple input such as an impulse response. One can then extend this information to visualize the filter's response to more complex signals. Riemann spheres have been used, together with digital video, for this purpose.Impulse responseThe impulse response, often denoted h[k] or h k, is a measurement of how a filter will respond to the Kronecker delta function. For example, given a difference equation, one would set x0 = 1 and x k = 0 for and evaluate. The impulse response is a characterization of the filter's behaviour. Digital filters are typically considered in two categories: infinite impulse response (IIR) and finite impulse response (FIR). In the case of linear time-invariant FIR filters, the impulse response is exactly equal to the sequence of filter coefficients:IIR filters on the other hand are recursive, with the output depending on both current and previous inputs as well as previous outputs. The general form of the an IIR filter is thus:Plotting the impulse response will reveal how a filter will respond to a sudden, momentary disturbance.Difference equationIn discrete-time systems, the digital filter is often implemented by converting the transfer function to a linear constant-coefficient difference equation (LCCD) via the Z-transform. The discrete frequency-domain transfer function is written as the ratio of two polynomials. For example:This is expanded:and divided by the highest order of z:The coefficients of the denominator, a k, are the 'feed-backward' coefficients and the coefficients of the numerator are the 'feed-forward' coefficients, b k. The resultant linear difference equation is:or, for the example above:rearranging terms:then by taking the inverse z-transform:and finally, by solving for y[n]:This equation shows how to compute the next output sample, y[n], in terms of the past outputs, y[n−p], the present input, x[n], and the past inputs, x[n−p]. Applying the filter to an input in this form is equivalent to a Direct Form I or II realization, depending on the exact order of evaluation.Filter designMain article: Filter designThe design of digital filters is a deceptively complex topic.[1] Although filters are easily understood and calculated, the practical challenges of their design and implementation are significant and are the subject of much advanced research.There are two categories of digital filter: the recursive filter and the nonrecursive filter. These are often referred to as infinite impulseresponse (IIR) filters and finite impulse response (FIR) filters, respectively.[2]Filter realizationAfter a filter is designed, it must be realized by developing a signal flow diagram that describes the filter in terms of operations on sample sequences.A given transfer function may be realized in many ways. Consider how a simple expression such as ax+ bx+ c could be evaluated –one could also compute the equivalent x(a + b) + c. In the same way, all realizations may be seen as "factorizations" of the same transfer function, but different realizations will have different numerical properties. Specifically, some realizations are more efficient in terms of the number of operations or storage elements required for their implementation, and others provide advantages such as improved numerical stability and reduced round-off error. Some structures are better for fixed-point arithmetic and others may be better for floating-point arithmetic.Direct Form IA straightforward approach for IIR filter realization is Direct Form I, where the difference equation is evaluated directly. This form is practical for small filters, but may be inefficient and impractical (numerically unstable) for complex designs.[3] In general, this form requires 2N delay elements (for both input and output signals) for a filter of order N.Direct Form IIThe alternate Direct Form II only needs N delay units, where N is the order of the filter –potentially half as much as Direct Form I. This structure is obtained by reversing the order of the numerator and denominator sections of Direct Form I, since they are in fact two linear systems, and the commutativity property applies. Then, one will notice that there are two columns of delays (z− 1) that tap off the center net, and these can be combined since they are redundant, yielding the implementation as shown below.The disadvantage is that Direct Form II increases the possibility of arithmetic overflow for filters of high Q or resonance.[4]It has been shown that as Q increases, the round-off noise of both direct form topologies increases without bounds.[5]This is because, conceptually, the signal is first passed through an all-pole filter (which normally boosts gain at the resonant frequencies) before the result of that is saturated, then passed through an all-zero filter (which often attenuates much of what the all-pole half amplifies).Cascaded second-order sectionsA common strategy is to realize a higher-order (greater than 2) digital filter as a cascaded series of second-order "biquadratric" (or "biquad") sections[6] (see digital biquad filter). Advantages of this strategy is that the coefficient range is limited. Cascading direct form II sections result in N delay elements for filter order of N. Cascading direct form I sections result in N+2 delay elements since the delay elements of the input of any section (except the first section) are a redundant with the delay elements of the output of the preceding section.文献翻译译文:数字滤波在电子学、计算机科学和数学中,数位滤波器是在一个系统上执行一个采样,在离散时间上对信号进行的数学运算,以减少或增加这种信号的某些方面。
滤波器毕业设计外文翻译
译文应用于高Q跨导一电容带通滤波器的线性跨导运放设计王斌杨华中(清华大学电子工程系,北京 100084)摘要:设计了一种具有高的直流增益的宽带线性全差分跨导运放。
一方面,并联一个工作在线性区的场效应管来补偿直流三阶系数,得到了一种应用于连续时间滤波器、增加跨导器饱和区输入信号幅度的简单方法。
另一方面,结合负电阻电路提高了输出阻抗,实现高的直流增益而不需要额外的内部结点,并减小了因有限直流增益和寄生电容引起的相位偏差。
将此全差分跨导运放应用于0.18um CMOS工艺二阶带通滤波器,在3.3V电源电压、输入峰峰值1V时,HSPICE仿真结果的总谐波失真小于40dB,中心频率为20MHz,3dB带宽为0.18MHz,即Q为110。
关键词:线性跨导运放;高直流增益;高品质因数;带通滤波器1、引言近年来,随着模拟和数字集成电路的高度发展,混合模/数混合系统得以实现。
现行的滤波器已实现了各种不同程度的集成,并可将多种设计技术运用于完全连续时间滤波器的实现。
高频应用中,跨导-电容(g—C)方式是众所周知的连续时间的积分基本块。
积分m中的相位转移过剩将影响高频滤波器的频率响应,而运算跨导放大器(OTA)单元的优化设计可以消除相位误差。
为获得高输出阻抗并提高运算跨导放大器电压,可采用负阻抗消除它的正向输出电阻,同时也能补偿运算跨导放大器通过连续时间滤波器时因有限输出阻抗引入的损失,提高Q值。
负电阻电路(NRL)实现了高直流增益运算跨导放大器的大增益宽带,并避免了积分器相位偏差。
与其它广泛运用的增强技术相比,负电阻电路极点少,消耗的电能少。
本文介绍一种线性高直流增益的简单运算跨导放大器。
图1、带负电阻电路的运算跨导放大器2、高直流增益的负电阻电路运算跨导放大器模拟信号处理设计越来越多的运用运算跨导放大器,因为相对于传统的低输出阻抗的运算放大器(opamp)来说其速度较快,并且有合适的偏置跨导。
然而运算跨导放大器工作的线性范围受到严格限制,在近年的文献中已有阐述。
滤波器 外文翻译 外文文献 英文文献 用改进的窗函数设计FIR数字滤波器

Research on FIR Digital Filter Design Using an Improved Window FunctionTAN Jiajie , LUO Changyou, HUANG Sanwei ,DENG Xiaohui( Department of Physics and Electronic Information Science, Hengyang Normal University, Hengyang Hunan 421008, China)Abstract : Window function has been used to design a linear phase digital filer for long times, but the use o f optimization techniques for designing digital filter has become widespread in recent year A new met ho d has been proposed to improve FIR window function in this paper ,T he window function that combines with co sine sequences in linear is different from previous Hann ,Hamming and Blackman window function The paper also proposes linear programming to optimize characterization of FIR digital filter according to its magnitude condition, and gives out t he algorithm to design dig ital filter using the improved window function ,Finally , we have designed FIR filter using new window for simulation and compared w it h the filter designed by Hamming window, Blackman window function T he simulation results show that filters designed using this method to meet t he design specificationsKey words: improved window function; FIR digital filter ; window function; linear programming0 lead speechThe design method of FIR digital filters are mainly: window function method, frequency sampling method and the chebyshev etc corrugated approximation method [1-4]. Window function method is the most commonly used designing FIR digital filters, the simplest method of [4-5]. The essence of window function method is the truncated ideal impulse response to approximate the method petitions filter index. Frequency sampling method is a design optimization method for its shortcoming is when the design that use the variable is limited to a few samples values of transitional, cut-off frequency not easy control [3]. Chebyshev etc corrugated approximation method is a kind of optimization design, but existing computational complexity, big disadvantage computation [1-2].Window function method is simple in design, have closed form of formula, thus very practical. Defect is the stopband bandpass, cut-off frequency not easy control [2-3]. Digital filter, window function of auto-heating window function method of selecting, the key is: design to choose the appropriate window function, choose the right order number of digital filter, improve amplitude frequency characteristics, reduce Gibbs phenomenon, solve convergence problem [1-2]. [3] choose window function, through to Guass Guass window function improved, design a low-pass filter has better superiority; [4] the error information, using the known in the iteration process through the window function method continuously revised design result in filter order number, under the condition of invariable frequency response approximation, filter ideal frequency response. [5] use integer sequence, such as where Fibonacci sequence, Golomb sequence, ConwayHofstadter Recursive sequence, Triangular series produce window function to design the filter, its effect is better than that of classical design method. [6] choose dual window window function sequence of structure was system characteristics approximation error is the minimum; [7] will be well Saramaki Dolph - and Chebysheve window with the well designed, its effect FIR digital filters than Kaiser well; [8] put good effect in Hamming ReImann well well well and Kaiser window. [9] put forward a kind of exponential window function, this window function has the width can be adjusted with the window design characteristics, the digital filters have more centralized, Lord disc energy side-lobe less features. [10] using linear programming design linear phase fir filter ascending cosine to 100 % super bandwidth. [11] linear programming method is adopted to design digital filter. This paper USES the existing window function, and carry on the weighted combination, reference [10 or 11], and linear programming with long Hamming, Blackman window are compared. The advantages of this method is strong logicality, goal clear, easy to achieve, and to explore the best solutions.1 common window functionWindow function select principle: window function as focus on energy, Lord disc transitional steep; Reduce the window function spectrum side-lobe level, increase stopband attenuation, and reduce the stopband bandpass and ripple effect. Common window function have [1-4] : Rectangle window, Hanning window, Hamming window, Blackman window, Kaiser window. Window function method design idea of FIR filters is [1-2] : make sure the frequency response of ideal filter )(ωj d e H .The frequency response of practical design filter ∑-=-=10)()(N n j j e n h e H ωωTo approximate )(ωj d e H .For again ∑-=-=10)()(N n j j e n h e H ωωReverse transform get Finally use window function )(n w To truncate )(n h d ,mean h( n) =)(n h d )(n w .To truncate )(n h d ,Will produce gibbs phenomenon, all the window function choices to reduce this phenomenon for the purpose. Judge ideal window function mainly according to the following three criteria! The Lord is high double amplitude and its width should try to narrowThe amplitude side-lobe fast speed, the biggest drop side-lobe relative to the main valve should be as low as possible. #transitional requirements will try to narrow. Facts prove the two standard cannot simultaneously satisfy window function should be, so the twocompromise [1-3]. In order to reduce caused due to add window truncation ripple and transitional grows wider impact in engineering design common Hamming window and Kaiser window.2 improved window function [1-2] enumerated window function, Hanning window, Hamming window, Blackman window is cosine sequence andrectangular sequence of linear combination. In order to restrain the amplitude,side-lobe Hanning window, Hamming window on the basis of the second, add cosine, when the harmonic component design and ideal window function and related to the frequency response of different from Blackman window, window function improved form below )(14cos 12cos )(n N R N n c N n b a n ⎥⎦⎤⎢⎣⎡-+-+=ππω (1)Formula (1) of a, b, c undetermined, their size and given filter technology indexes related. For convenience, this window function length choice for odd. The next several special case discussion this type. Case 1, take a = 1, b = c = 0, for rectangular window. Condition 2, take a = 0.5, b = - 0.5, c = 0, for Hann window. Case 3, take a = 0.53, b = - 0.46, c = 0, for Hamming window.Situation, a = 4, b = 0 0.42 j c = 0.08, 5, Blackman window for. By aboveknowable, the improved window function with these four window function the nature, belong to the general form of the window function.3 improved window function algorithmAccording to the given filter technology index )(ωj d e H ,Determine the backlog filter unit, but by sampling response formula below ask out:ωπωππωd e e H n h j j d d ⎰-=)(21)( (2)Calculating the actual filter unit sampling response:h( n) = )(n h d )(n w (3)Filter the frequency response is:∑-=-=10)()(N n j j e n h e H ωω(4) Will formula (1) generation into the formula (4) :ξωππjn N n n d j e N n c N n b a h e H --=⎥⎦⎤⎢⎣⎡-+-+=∑14cos 12cos )(10)( (5) Reference [1-2] [10 or 11], consider FIR filters satisfy the first kind of linearphase conditions, For 21-N Accidentally symmetry, And N an odd number,ordering h ( n) = )(n h d ⨯⎥⎦⎤⎢⎣⎡-+-+14cos 12cos N n c N n b a ππ。
数字滤波器外文翻译

中文5590字毕业设计(外文翻译材料)2009年6月学 院: 专 业: 学生姓名: 指导教师: 电气与电子工程学院 电子信息工程0503DIGITAL FILTERSDigital filtering is one of the most powerful tools of DSP. Apart from the obvious advantages of virtually eliminating errors in the filter associated with passive component fluctuations over time and temperature, op amp drift (active filters), etc., digital filters are capable of performance specifications that would, at best, be extremely difficult, if not impossible, to achieve with an analog implementation. In addition, the characteristics of a digital filter can be easily changed under software control. Therefore, they are widely used in adaptive filtering applications in communications such as echo cancellation in modems, noise cancellation, and speech recognition.The actual procedure for designing digital filters has the same fundamental elements as that for analog filters. First, the desired filter responses are characterized, and the filter parameters are then calculated. Characteristics such as amplitude and phase response are derived in the same way. The key difference between analog and digital filters is that instead of calculating resistor, capacitor, and inductor values for an analog filter, coefficient values are calculated for a digital filter. So for the digital filter, numbers replace the physical resistor and capacitor components of the analog filter. These numbers reside in a memory as filter coefficients and are used with the sampled data values from the ADC to perform the filter calculations.The real-time digital filter, because it is a discrete time function, works with digitized data as opposed to a continuous waveform, and a new data point is acquired each sampling period. Because of this discrete nature, data samples are referenced as numbers such as sample 1, sample 2, sample 3, etc. Figure 1 shows a low frequency signal containing higher frequency noise which must be filtered out. This waveform must be digitized with an ADC to produce samples x(n). These data values are fed to the digital filter, which in this case is a lowpass filter. The output data samples, y(n), are used to reconstruct an analog waveform using a low glitch DAC.Digital filters, however, are not the answer to all signal processing filtering requirements. In order to maintain real-time operation, the DSP processor must be able to execute all the steps in the filter routine within one sampling clock period1/f s.A fast general purpose fixed-point DSP such as the ADSP-2189M at 75MIPS can 。
数字示波器外文翻译文献
数字示波器外文翻译文献(文档含中英文对照即英文原文和中文翻译)原文:Design and FPGA implementation of a wireless hyperchaotic communication system for secure real-time image transmission AbstractIn this paper, we propose and demonstrate experimentally a new wireless digital encryption hyperchaotic communication system based on radio frequency (RF) communication protocols for secure real-time data or image transmission. A reconfigurable hardware architecture is developed to ensure the interconnection between two field programmable gate array developmentplatforms through XBee RF modules. To ensure the synchronization and encryption of data between the transmitter and the receiver, a feedback masking hyperchaotic synchronization technique based on a dynamic feedback modulation has been implemented to digitally synchronize the encrypter hyperchaotic systems. The obtained experimental results show the relevance of the idea of combining XBee (Zigbee or Wireless Fidelity) protocol, known for its high noise immunity, to secure hyperchaotic communications. In fact, we have recovered the information data or image correctly after real-time encrypted data or image transmission tests at a maximum distance (indoor range) of more than 30 m and with maximum digital modulation rate of 625,000 baud allowing a wireless encrypted video transmission rate of 25 images per second with a spatial resolution of 128 ×128 pixels. The obtained performance of the communication system is suitable for secure data or image transmissions in wireless sensor networks.IntroductionOver the past decades, the confidentiality of multimedia communications such as audio, images, and video has become increasingly important since communications of digital products over the network (wired/wireless) occur more frequently. Therefore, the need for secure data and transmission is increasing dramatically and defined by the required levels of security depending on the purpose of communication. To meet these requirements, a wide variety of cryptographic algorithms have been proposed. In this context, the main challenge of stream cipher cryptography relates to the generation of long unpredictable key sequences. More precisely, the sequence has to be random, its period must be large, and the various patterns of a given length must be uniformly distributed over the sequence. Traditional ciphers like DES, 3DES, IDEA, RSA, or AES are less efficient for real-time secure multimedia data encryption systems and exhibit some drawbacks and weakness in the high streamdata encryption. Indeed, the increase and availability of a high-power computation machine allow a force brute attack against these ciphers. Moreover, for some applications which require a high-levelcomputation and where a large computational time and high computing power are needed (for example, encryption of large digital images), these cryptosystems suffer from low-level efficiency. Consequently, these encryption schemes are not suitable for many high-speed applications due to their slow speed in real-time processing and some other issues such as in the handling of various data formatting. Over the recent years, considerable researches have been taken to develop new chaotic or hyperchaotic systems and for their promising applications in real-time encryption and communication. In fact, it has been shown that chaotic systems are good candidates for designing cryptosystems with desired properties. The most prominent is sensitivity dependence on initial conditions and system parameters, and unpredictable trajectories.Furthermore, chaos-based and other dynamical systembased algorithms have many important properties such as the pseudorandom properties, ergodicity and nonperiodicity. These properties meet some requirements such as sensitivity to keys, diffusion, and mixing in the cryptographic context. Therefore, chaotic dynamics is expected to provide a fast and easy way for building superior performance cryptosystems, and the properties of chaotic maps such as sensitivity to initial conditions and random-like behavior have attracted the attention to develop data encryption algorithms suitable for secure multimedia communications. Until recently, chaotic communication has been a subject of major interest in the field of wireless communications. Many techniques based on chaos have been proposed such as additive chaos masking (ACM), where the analog message signal is added to the output of the chaos generator within the transmitter. In, chaos shift keying is used where the binary message signal selects the carrier signal from two or more different chaotic attractors. Authors use chaotic modulation where the message information modulates a parameter of the chaotic generator. Chaos control methods rely on the fact that small perturbations cause the symbolic dynamics of a chaotic system to track a prescribed symbol sequence. In, the receiver system is designed in an inverse manner to ensure the recovery of theencryption signal. An impulsive synchronization scheme is employed to synchronize chaotic transmitters and receivers. However, all of these techniques do not provide a real and practical solution to the challenging issue of chaotic communication which is based on extreme sensitivity of chaotic synchronization to both the additive channel noise and parameter mismatches. Precisely, since chaos is sensitive to small variations of its initial conditions and parameters, it is very difficult to synchronize two chaotic systems in a communication scheme. Some proposed synchronization techniques have improved the robustness to parameter mismatches as reported in, where impulsive chaotic synchronization and an open-loop-closed-loopbased coupling scheme are proposed, respectively. Other authors proposed to improve the robustness of chaotic synchronization to channel noise, where a coupled lattice instead of coupled single maps is used to decrease the master-slave synchronization error. In, symbolic dynamics-based noise reduction and coding are proposed. Some research into equalization algorithms for chaotic communication systems are also proposed. For other related results in the literature, see. However, none of them were tested through a real channel under real transmission conditions. Digital synchronization can overcome the failed attempts to realize experimentally a performed chaotic communication system. In particular, when techniques exhibit any difference between the master/transmitter and slave/receiver systems, it is due to additive information or noise channel (disturbed chaotic dynamics) which breaks the symmetry between the two systems, leading to an accurate non-recovery of the transmitted information signal at the receiver. In, an original solution to the hard problem of chaotic synchronization high sensibility to channel noise has been proposed. This solution, based on a controlled digital regenerated chaotic signal at the receiver, has been tested and validated experimentally in a real channel noise environment through a realized wireless digital chaotic communication system based on zonal intercommunication global-standard, where battery life was long, which was economical to deploy and which exhibited efficient use of resources, knownas the ZigBee protocol. However, this synchronization technique becomes sensible to high channel noise from a higher transmission rate of 115 kbps, limiting the use of the ZigBee and Wireless Fidelity (Wi-Fi) protocols which permit wireless transmissions up to 250 kbps and 65 Mbps, respectively.Consequently, no reliable commercial chaos-based communication system is used to date to the best of our knowledge. Therefore, there are still plentiful issues to be resolved before chaos-based systems can be put into practical use. To overcome these drawbacks, we propose in this paper a digital feedback hyperchaotic synchronization and suggest the use of advanced wireless communication technologies, characterized by high noise immunity, to exploit digital hyperchaotic modulation advantages for robust secure data transmissions. In this context, as results of the rapid growth of communication technologies, in terms of reliability and resistance to channel noise, an interesting communication protocol for wireless personal area networks (WPANs, i.e., ZigBee or ZigBee Pro Low-Rate-WPAN protocols) and wireless local area network (WLAN, i.e., Wi-Fi protocol WLAN) is developed. These protocols are identified by the IEEE 802.15.4 and IEEE 802.11 standards and known under the name ZigBee and Wi-Fi communication protocols, respectively. These protocols are designed to communicate data through hostile Radio Frequency (RF) environments and to provide an easy-to-use wireless data solution characterized by secure, low-power, and reliable wireless network architectures. These properties are very attractive for resolving the problems of chaotic communications especially the high noise immunity property. Hence, our idea is to associate chaotic communication with theWLAN or WPAN communication protocols. However, this association needs a numerical generation of the chaotic behavior since the XBee protocol is based on digital communications.In the hardware area, advanced modern digital signal processing devices, such as field programmable gate array (FPGA), have been widely used to generate numerically the chaotic dynamics or the encryption keys. The advantage of these techniques is that the parameter mismatch problem does not existcontrary to the analog techniques. In addition, they offer a large possible integration of chaotic systems in the most recent digital communication technologies such as the ZigBee communication protocol. In this paper, a wireless hyperchaotic communication system based on dynamic feedback modulation and RF XBee protocols is investigated and realized experimentally. The transmitter and the receiver are implemented separately on two Xilinx Virtex-II Pro circuits and connected with the XBee RF module based on the Wi-Fi or ZigBee protocols. To ensure and maintain this connection, we have developed a VHSIC (very high speed integrated circuit) hardware description language (VHDL)-based hardware architecture to adapt the implemented hyperchaotic generators, at the transmitter and receiver, to the XBee communication protocol. Note that the XBee modules interface to a host device through a logic-level asynchronous serial port. Through its serial port, the module can communicate with any logic and voltage-compatible Universal Asynchronous Receiver/Transmitter (UART). The used hyperchaotic generator is the well-known and the most investigated hyperchaotic Lorenz system. This hyperchaotic key generator is implemented on FPGA technology using an extension of the technique developed in for three-dimensional (3D) chaotic systems. This technique is optimal since it uses directly VHDL description of a numerical resolution method of continuous chaotic system models. A number of transmission tests are carried out for different distances between the transmitter and receiver. The real-time results obtained validate the proposed hardware architecture. Furthermore, it demonstrates the efficiency of the proposed solution consisting on the association of wireless protocols to hyperchaotic modulation in order to build a reliable digital encrypted data or image hyperchaotic communication system.Hyperchaotic synchronization and encryption techniqueContrary to a trigger-based slave/receiver chaotic synchronization by the transmitted chaotic masking signal, which limits the performance of the rate synchronization transmission, we propose a digital feedback hyperchaoticsynchronization (FHS). More precisely, we investigate a new scheme for the secured transmission of information based on master-slave synchronization of hyperchaotic systems, using unknown input observers. The proposed digital communication system is based on the FHS through a dynamic feedback modulation (DFM) technique between two Lorenz hyperchaotic generators. This technique is an extension and improvement of the one developed in for synchronizing two 3D continuous chaotic systems in the case of a wired connection.The proposed digital feedback communication scheme synchronizes the master/transmitter and the slave/receiver by the injection of the transmitted masking signal in the hyperchaotic dynamics of the slave/receiver. The basic idea of the FHS is to transmit a hyperchaotic drive signal S(t) after additive masking with a hyperchaotic signal x(t) of the master (transmitter) system (x , y , z ,w ). Hyperchaotic drive signal is then injected both in the three subsystems (y , z ,w ) and (r r r w z y ,,). The subscript r represents the slave or receiver system (r r r r w z y x ,,,). At the receiver, the slave system regenerates the chaotic signal )(t x r and a synchronization is obtained between two trajectories x(t) and )(t x r if()()0||lim =-∞→t X t X r t (1) This technique can be applied to chaotic modulation. In our case, it is used for generating hyperchaotic keys for stream cipher communications, where the synchronization between the encrypter and the decrypter is very important. Therefore, at the transmitter, the transmitted signal after the additive hyperchaos masking (digital modulation) isS(t) = x(t) + d(t). (2)where d(t) is the information signal and x(t) is the hyperchaotic carrier. At the receiver, after synchronization of the regenerated hyperchaotic signal )(t x rwith the received signal )(t S r and the demodulation operation, we can recover the information signal d(t) correctly as follows:)()()(t x t S t d r r -=. (3)Therefore, the slave/receiver will generate a hyperchaotic behavior identical to that of the master/transmitter allowing to recover correctly the information signal after the demodulation operation. The advantageof this technique is that the information signal d(t) doesnot perturb the hyperchaotic generator dynamics, contraryto the ACM-based techniques of and, because d(t) is injected at both the master/transmitter and slave/receiver after the additive hyperchaotic masking. Thus, for small values of information magnitude, the information will be recovered correctly. It should be noted that we have already confirmed this advantage by testing experimentally the HS-DFM technique performances for synchronizing hyperchaotic systems (four-dimensional (4D) continuous chaotic systems) in the case of wired connection between two Virtex-II Pro development platforms. After many experimental tests and from the obtained real-time results, we concluded that the HS-DFM is very suitable for wired digital chaotic communication systems. However, in the present work, one of the objectives is to test and study the performances of the HS-DFM technique in the presence of channel noise through real-time wireless communication tests. To performthe proposed approach, a digital implementation of the master and slave hyperchaotic systems is required. Therefore, we investigate the hardware implementation of the proposed FHS-DFM technique between two Lorenz hyperchaotic generators using FPGA. To achieve this objective, we propose the following details of the proposed architecture.译文:无线超混沌通信系统安全的实时图像传输的设计和FPGA实现摘要在本文中,我们提出并论证了一种基于无线电频率通信协议对数据或图像安全实时传输的新的无线数字超混沌加密通信系统。
IIR数字滤波器英文文献以及翻译

2013 届毕业设计(论文)英文文献及其翻译资料院、部:电气与信息工程学院学生姓名:指导教师:职称专业:电子信息工程班级:完成时间:2013年6月7日Signal processingSignal processing is an area of electrical engineering and applied mathematics that deals with operations on or analysis of signals, in either discrete or continuous time, to perform useful operations on those signals. Signals of interest can include sound, images, time-varying measurement values and sensor data, for example biological data such as electrocardiograms, control system signals, telecommunication transmission signals such as radio signals, and many others. Signals are analog or digital electrical representations of time-varying or spatial-varying physical quantities. In the context of signal processing, arbitrary binary data streams and on-off signalling are not considered as signals, but only analog and digital signals that are representations of analog physical quantities.HistoryAccording to Alan V. Oppenheim and Ronald W. Schafer, the principles of signal processing can be found in the classical numerical analysis techniques of the 17th century. They further state that the "digitalization" or digital refinement of these techniques can be found in the digital control systems of the 1940s and 1950s.Categories of signal processingAnalog signal processingAnalog signal processing is for signals that have not been digitized, as in classical radio, telephone, radar, and television systems. This involves linear electronic circuits such as passive filters, active filters, additive mixers, integrators and delay lines. It also involves non-linear circuits such as compandors, multiplicators (frequency mixers and voltage-controlled amplifiers), voltage-controlled filters, voltage-controlled oscillators and phase-locked loops.Discrete time signal processingDiscrete time signal processing is for sampled signals that are considered as defined only at discrete points in time, and as such are quantized in time, but not in magnitude.Analog discrete-time signal processing is a technology based on electronic devices such as sample and hold circuits, analog time-division multiplexers, analog delay lines and analog feedback shift registers. This technology was a predecessor of digital signal processing (see below), and is still used in advanced processing of gigahertz signals.The concept of discrete-time signal processing also refers to a theoretical discipline that establishes a mathematical basis for digital signal processing, without taking quantization error into consideration.Digital signal processingDigital signal processing is for signals that have been digitized. Processing is done by general-purpose computers or by digital circuits such as ASICs, field-programmable gate arrays or specialized digital signal processors (DSP chips). Typical arithmetical operations include fixed-point and floating-point, real-valued and complex-valued, multiplication and addition. Other typical operations supported by the hardware are circular buffers and look-up tables. Examples of algorithms are the Fast Fourier transform (FFT), finite impulse response (FIR) filter, Infinite impulse response (IIR) filter, and adaptive filters such as the Wiener and Kalman filters1.Digital signal processingDigital signal processing (DSP) is concerned with the representation of signals by a sequence of numbers or symbols and the processing of these signals. Digital signal processing and analog signal processing are subfields of signal processing. DSP includes subfields like: audio and speech signal processing, sonar and radar signal processing, sensor array processing, spectral estimation, statistical signal processing, digital image processing, signal processing for communications, control of systems, biomedical signal processing, seismic data processing, etc.The goal of DSP is usually to measure, filter and/or compress continuous real-world analog signals. The first step is usually to convert the signal from an analog to a digital form, by sampling it using an analog-to-digital converter (ADC), which turns the analog signal into a stream of numbers. However, often, the required output signal is another analog output signal, which requires a digital-to-analogconverter (DAC). Even if this process is more complex than analog processing and has a discrete value range, the application of computational power to digital signal processing allows for many advantages over analog processing in many applications, such as error detection and correction in transmission as well as data compression.[1]DSP algorithms have long been run on standard computers, on specialized processors called digital signal processors (DSPs), or on purpose-built hardware such as application-specific integrated circuit (ASICs). Today there are additional technologies used for digital signal processing including more powerful general purpose microprocessors, field-programmable gate arrays (FPGAs), digital signal controllers (mostly for industrial apps such as motor control), and stream processors, among others.[2]2. DSP domainsIn DSP, engineers usually study digital signals in one of the following domains: time domain (one-dimensional signals), spatial domain (multidimensional signals), frequency domain, autocorrelation domain, and wavelet domains. They choose the domain in which to process a signal by making an informed guess (or by trying different possibilities) as to which domain best represents the essential characteristics of the signal. A sequence of samples from a measuring device produces a time or spatial domain representation, whereas a discrete Fourier transform produces the frequency domain information, that is the frequency spectrum. Autocorrelation is defined as the cross-correlation of the signal with itself over varying intervals of time or space.3. Signal samplingMain article: Sampling (signal processing)With the increasing use of computers the usage of and need for digital signal processing has increased. In order to use an analog signal on a computer it must be digitized with an analog-to-digital converter. Sampling is usually carried out in two stages, discretization and quantization. In the discretization stage, the space of signals is partitioned into equivalence classes and quantization is carried out by replacing the signal with representative signal of the corresponding equivalence class. In thequantization stage the representative signal values are approximated by values from a finite set.The Nyquist–Shannon sampling theorem states that a signal can be exactly reconstructed from its samples if the sampling frequency is greater than twice the highest frequency of the signal; but requires an infinite number of samples . In practice, the sampling frequency is often significantly more than twice that required by the signal's limited bandwidth.A digital-to-analog converter is used to convert the digital signal back to analog. The use of a digital computer is a key ingredient in digital control systems.4. Time and space domainsMain article: Time domainThe most common processing approach in the time or space domain is enhancement of the input signal through a method called filtering. Digital filtering generally consists of some linear transformation of a number of surrounding samples around the current sample of the input or output signal. There are various ways to characterize filters; for example:∙ A "linear" filter is a linear transformation of input samples; other filters are "non-linear". Linear filters satisfy the superposition condition, i.e. if an input is a weighted linear combination of different signals, the output is an equally weighted linear combination of the corresponding output signals.∙ A "causal" filter uses only previous samples of the input or output signals; while a "non-causal" filter uses future input samples. A non-causal filter can usually be changed into a causal filter by adding a delay to it.∙ A "time-invariant" filter has constant properties over time; other filters such as adaptive filters change in time.∙Some filters are "stable", others are "unstable". A stable filter produces an output that converges to a constant value with time, or remains bounded within a finite interval. An unstable filter can produce an output that grows without bounds, with bounded or even zero input.A "finite impulse response" (FIR) filter uses only the input signals, while an "infinite impulse response" filter (IIR) uses both the input signal and previous samples of the output signal. FIR filters are always stable, while IIR filters may be unstable.Filters can be represented by block diagrams which can then be used to derive a sample processing algorithm to implement the filter using hardware instructions. A filter may also be described as a difference equation, a collection of zeroes and poles or, if it is an FIR filter, an impulse response or step response.The output of a digital filter to any given input may be calculated by convolving the input signal with the impulse response.5. Frequency domainMain article: Frequency domainSignals are converted from time or space domain to the frequency domain usually through the Fourier transform. The Fourier transform converts the signal information to a magnitude and phase component of each frequency. Often the Fourier transform is converted to the power spectrum, which is the magnitude of each frequency component squared.The most common purpose for analysis of signals in the frequency domain is analysis of signal properties. The engineer can study the spectrum to determine which frequencies are present in the input signal and which are missing.In addition to frequency information, phase information is often needed. This can be obtained from the Fourier transform. With some applications, how the phase varies with frequency can be a significant consideration.Filtering, particularly in non-realtime work can also be achieved by converting to the frequency domain, applying the filter and then converting back to the time domain. This is a fast, O(n log n) operation, and can give essentially any filter shape including excellent approximations to brickwall filters.There are some commonly used frequency domain transformations. For example, the cepstrum converts a signal to the frequency domain through Fourier transform, takes the logarithm, then applies another Fourier transform. This emphasizes thefrequency components with smaller magnitude while retaining the order of magnitudes of frequency components.6. Z-domain analysisWhereas analog filters are usually analysed on the s-plane; digital filters are analysed on the z-plane or z-domain in terms of z-transforms.Most filters can be described in Z-domain (a complex number superset of the frequency domain) by their transfer functions. A filter may be analysed in the z-domain by its characteristic collection of zeroes and poles.7. ApplicationsThe main applications of DSP are audio signal processing, audio compression, digital image processing, video compression, speech processing, speech recognition, digital communications, RADAR, SONAR, seismology, and biomedicine. Specific examples are speech compression and transmission in digital mobile phones, room matching equalization of sound in Hifi and sound reinforcement applications, weather forecasting, economic forecasting, seismic data processing, analysis and control of industrial processes, computer-generated animations in movies, medical imaging such as CAT scans and MRI, MP3 compression, image manipulation, high fidelity loudspeaker crossovers and equalization, and audio effects for use with electric guitar amplifiers8. ImplementationDigital signal processing is often implemented using specialised microprocessors such as the DSP56000, the TMS320, or the SHARC. These often process data using fixed-point arithmetic, although some versions are available which use floating point arithmetic and are more powerful. For faster applications FPGAs[3]might be used. Beginning in 2007, multicore implementations of DSPs have started to emerge from companies including Freescale and Stream Processors, Inc. For faster applications with vast usage, ASICs might be designed specifically. For slow applications, a traditional slower processor such as a microcontroller may be adequate. Also a growing number of DSP applications are now being implemented on Embedded Systems using powerful PCs with a Multi-core processor.信号处理信号处理是电气工程和应用数学领域,在离散的或连续的时间域处理和分析信号,以对这些信号进行所需的有用的操作。
IIR数字滤波器论文中英文资料对照外文翻译文献综述
IIR数字滤波器中英文资料对照外文翻译文献综述IIR Digital Filter DesignAn important step in the development of a digital filter is the determination of a realizable transfer function G(z) approximating the given frequency response specifications. If an IIR filter is desired,it is also necessary to ensure that G(z) is stable. The process of deriving the transfer function G(z) is called digital filter design. After G(z) has been obtained, the next step is to realize it in the form of a suitable filter structure. In chapter 8,we outlined a variety of basic structures for the realization of FIR and IIR transfer functions. In this chapter,we consider the IIR digital filter design problem. The design of FIR digital filters is treated in chapter 10.First we review some of the issues associated with the filter design problem. A widely used approach to IIR filter design based on the conversion of a prototype analog transfer function to a digital transfer function is discussed next. Typical design examples are included to illustrate this approach. We then consider the transformation of one type of IIR filter transfer function into another type, which is achieved by replacing the complex variable z by a function of z. Four commonly used transformations are summarized. Finally we consider the computer-aided design of IIR digital filter. To this end, we restrict our discussion to the use of matlab in determining the transfer functions.9.1 preliminary considerationsThere are two major issues that need to be answered before one can develop the digital transfer function G(z). The first and foremost issue is the development of a reasonablefilter frequency response specification from the requirements of the overall system in which the digital filter is to be employed. The second issue is to determine whether an FIR or IIR digital filter is to be designed. In the section ,we examine these two issues first . Next we review the basic analytical approach to the design of IIR digital filters and then consider the determination of the filter order that meets the prescribed specifications. We also discuss appropriate scaling of the transfer function.9.1.1 Digital Filter SpecificationsAs in the case of the analog filter,either the magnitude and/or the phase(delay) response is specified for the design of a digital filter for most applications. In some situations, the unit sample response or step response may be specified. In most practical applications, the problem of interest is the development of a realizable approximation to a given magnitude response specification. As indicated in section 4.6.3, the phase response of the designed filter can be corrected by cascading it with an allpass section. The design of allpass phase equalizers has received a fair amount of attention in the last few years.We restrict our attention in this chapter to the magnitude approximation problem only. We pointed out in section 4.4.1 that there are four basic types of filters,whose magnitude responses are shown in Figure 4.10. Since the impulse response corresponding to each of these is noncausal and of infinite length, these ideal filters are not realizable. One way of developing a realizable approximation to these filter would be to truncate the impulse response as indicated in Eq.(4.72) for a lowpass filter. The magnitude response of the FIR lowpass filter obtained by truncating the impulse response of the ideal lowpass filter does not have a sharp transition from passband to stopband but, rather, exhibits a gradual "roll-off."Thus, as in the case of the analog filter design problem outlined in section 5.4.1, the magnitude response specifications of a digital filter in the passband and in the stopband are given with some acceptable tolerances. In addition, a transition band is specifiedbetween the passband and the stopband to permit the magnitude to drop off smoothly. For example, the magnitude )(ωj e G of a lowpass filter may be given as shown in Figure7.1. As indicated in the figure, in the passband defined by 0p ωω≤≤, we require that the magnitude approximates unity with an error of p δ±,i.e.,p p j p for e G ωωδδω≤+≤≤-,1)(1.In the stopband, defined byπωω≤≤s ,we require that the magnitude approximateszero with an error of i s ,δ.e., ,)(s j e G δω≤ for πωω≤≤s .The frequencies p ω and s ω are , respectively, called the passband edge frequency and the stopband edge frequency. The limits of the tolerances in the passband and stopband, p δ and s δ, are usually called the peak ripple values. Note that the frequency response )(ωj e G of a digital filter is a periodic function of ω,and the magnitude response of a real-coefficient digital filter is an even function ofω. As a result, the digital filter specifications are given only for the range πω≤≤0.Digital filter specifications are often given in terms of the loss function,)(log 20)(10ωωζj e G -=, in dB. Here the peak passband ripple p α and theminimum stopband attenuation s α are given in dB,i.e., the loss specifications of a digital filter are given bydB p p )1(log 2010δα--=,dB s s )(log 2010δα-=. 9.1 Preliminary ConsiderationsAs in the case of an analog lowpass filter, the specifications for a digital lowpassfilter may alternatively be given in terms of its magnitude response, as in Figure 7.2. Here the maximum value of the magnitude in the passband is assumed to be unity, and the maximum passband deviation, denoted as 1/21ε+,is given by the minimum value of the magnitude in the passband. The maximum stopband magnitude is denoted by 1/A.For the normalized specification, the maximum value of the gain function or the minimum value of the loss function is therefore 0 dB. The quantitymax α given bydB )1(log 20210max εα+= Is called the maximum passband attenuation. Forp δ<<1, as is typically the case, it can be shown thatp p αδα2)21(log 2010max ≅--≅The passband and stopband edge frequencies, in most applications, are specified in Hz, along with the sampling rate of the digital filter. Since all filter design techniques are developed in terms of normalized angular frequencies p ω and s ω,the sepcified critical frequencies need to be normalized before a specific filter design algorithm can be applied. Let T F denote the sampling frequency in Hz, and F P and F s denote, respectively,the passband and stopband edge frequencies in Hz. Then the normalized angular edge frequencies in radians are given byT F F F F p Tp T p p ππω22==Ω=T F F F F s Ts T s s ππω22==Ω= 9.1.2 Selection of the Filter Type The second issue of interest is the selection of the digital filter type,i.e.,whether an IIR or an FIR digital filter is to be employed. The objective of digital filter design is to develop a causal transfer function H(z) meeting the frequency response specifications. ForIIR digital filter design, the IIR transfer function is a real rational function of 1-z .H(z)=N MdNzz d z d d pMz z p z p p ------++++++++......2211022110 Moreover, H(z) must be a stable transfer function, and for reduced computational complexity, it must be of lowest order N. On the other hand, for FIR filter design, the FIRtransfer function is a polynomial in 1-z :∑=-=N n n zn h z H 0][)(For reduced computational complexity, the degree N of H(z) must be as small as possible. In addition, if a linear phase is desired, then the FIR filter coefficients must satisfy the constraint:][][N n h n h -±=T here are several advantages in using an FIR filter, since it can be designed with exact linear phase and the filter structure is always stable with quantized filter coefficients. However, in most cases, the order N FIR of an FIR filter is considerably higher than the order N IIR of an equivalent IIR filter meeting the same magnitude specifications. In general, the implementation of the FIR filter requires approximately N FIR multiplications per output sample, whereas the IIR filter requires 2N IIR +1 multiplications per output sample. In the former case, if the FIR filter is designed with a linear phase, then the number of multiplications per output sample reduces to approximately (N FIR +1)/2. Likewise, most IIR filter designs result in transfer functions with zeros on the unit circle, and the cascade realization of an IIR filter of order IIR N with all of the zeros on the unit circle requires [(3IIR N +3)/2] multiplications per output sample. It has been shown that for most practical filter specifications, the ratio N FIR /N IIR is typically of the order of tens or more and, as a result, the IIR filter usually is computationally more efficient[Rab75]. However ,if the group delay of the IIR filter is equalized by cascading it with an allpass equalizer, then the savings in computation may no longer be that significant [Rab75]. Inmany applications, the linearity of the phase response of the digital filter is not an issue,making the IIR filter preferable because of the lower computational requirements.9.1.3 Basic Approaches to Digital Filter DesignIn the case of IIR filter design, the most common practice is to convert the digital filter specifications into analog lowpass prototype filter specifications, and then to transform it into the desired digital filter transfer function G(z). This approach has been widely used for many reasons:(a) Analog approximation techniques are highly advanced.(b) They usually yield closed-form solutions.(c) Extensive tables are available for analog filter design.(d) Many applications require the digital simulation of analog filters.In the sequel, we denote an analog transfer function as)()()(s D s P s H a a a =, Where the subscript "a" specifically indicates the analog domain. The digital transfer function derived form H a (s) is denoted by)()()(z D z P z G = The basic idea behind the conversion of an analog prototype transfer function H a (s) into a digital IIR transfer function G(z) is to apply a mapping from the s-domain to the z-domain so that the essential properties of the analog frequency response are preserved. The implies that the mapping function should be such that(a) The imaginary(j Ω) axis in the s-plane be mapped onto the circle of the z-plane.(b) A stable analog transfer function be transformed into a stable digital transfer function.To this end,the most widely used transformation is the bilinear transformation described in Section 9.2.Unlike IIR digital filter design,the FIR filter design does not have any connection with the design of analog filters. The design of FIR filter design does not have any connection with the design of analog filters. The design of FIR filters is therefore based on a direct approximation of the specified magnitude response,with the often added requirement that the phase response be linear. As pointed out in Eq.(7.10), a causal FIR transfer function H(z) of length N+1 is a polynomial in z -1 of degree N. The corresponding frequency response is given by∑=-=N n n j j en h e H 0][)(ωω.It has been shown in Section 3.2.1 that any finite duration sequence x[n] of length N+1 is completely characterized by N+1 samples of its discrete-time Fourier transfer X(ωj e ). As a result, the design of an FIR filter of length N+1 may be accomplished by finding either the impulse response sequence {h[n]} or N+1 samples of its frequency response )H(e j ω. Also, to ensure a linear-phase design, the condition of Eq.(7.11) must be satisfied. Two direct approaches to the design of FIR filters are the windowed Fourier series approach and the frequency sampling approach. We describe the former approach in Section 7.6. The second approach is treated in Problem 7.6. In Section 7.7 we outline computer-based digital filter design methods.IIR数字滤波器的设计在一个数字滤波器发展的重要步骤是可实现的传递函数G(z)的接近给定的频率响应规格。
导向滤波论文翻译

导向滤波论⽂翻译摘要:在本⽂中,我们提出了⼀种新型的显式图像滤波器引导滤波器。
引导过滤器从本地线性模型得出,通过考虑引导图像的内容(可以是输⼊图像本⾝或其他不同图像)来⽣成滤波输出。
引导滤波器可以像流⾏的双边滤波器⼀样作为边缘保持平滑算法执⾏,但在边缘附近具有更好的⾏为。
它还具有与消隐拉普拉斯矩阵[2]的理论连接,因此与平滑算⼦相⽐更通⽤的概念,并且可以更好地利⽤引导图像中的结构。
此外,引导过滤器具有快速和⾮近似的线性时间算法,其计算复杂度与过滤核⼤⼩⽆关。
我们证明,引导过滤器在⼀个伟⼤的是有效和⾼效的各种计算机视觉和计算机图形应⽤,包括降噪,细节平滑/增强,HDR压缩,图像消光/⽻化,雾度去除和联合上采样。
1.介绍计算机视觉和计算机图形学中的⼤多数应⽤涉及图像滤波的概念,以减少噪声和/或提取有⽤的图像结构。
像图像模糊/锐化,边缘检测和特征提取等⼴泛使⽤的简单显式线性平移不变(LTI)滤波器,如⾼斯滤波器,拉普拉斯滤波器和Sobel滤波器[3]。
LTI滤波还包括求解泊松⽅程的过程,例如在⾼动态范围(HDR)压缩[4],图像拼接[5]和图像消隐[6]中,其中滤波内核被隐式定义为⼀个均匀的拉普拉斯矩阵。
LTI滤波器的内核是空间不变的,与任何图像内容⽆关。
但是在许多情况下,我们可能希望在过滤过程中包含来⾃给定指导图像的附加信息。
例如,在着⾊[7]中,输出⾊度通道应具有与给定亮度通道⼀致的边缘;在图像消光[2]中,输出alpha遮罩应该捕获像图像中的头发那样的薄结构。
实现这⼀⽬的的⼀种⽅法是通过考虑引导图像来优化直接对未知输出实施⼀些约束的⼆次函数。
然后通过求解⽤引导图像的信息编码的⼤稀疏矩阵来获得解。
这个不均匀的矩阵隐含地定义了⼀个转换变量的过滤内核。
这种⽅法⼴泛应⽤于许多应⽤,如着⾊[7],图像消光[2],多尺度分解[8]和雾度去除[9]。
虽然这种基于优化的⽅法通常产⽣最先进的质量,但伴随着长时间的计算时间。
有源电力滤波器英文文献和中文翻译

附录附录一:英文文献A 10KV Shunt Hybrid Active Filter for a Power DistributionSystemAbstract—this paper analyzes the compensation performance of a shunt hybrid active power filter. The hybrid active power filter, which combines passive filter and active power filter, has both respective merits, and is an important developing trend of filtering device. The hybrid active power filter can reduce the capacity of active power filter effectively and is more suitable for the engineering application for high voltage nonlinear loads. The compensation performance of hybrid active power filter is analyzed by estimating the effect of different active power filter gain and parameters change. Then, a conclusion has been obtained that the harmonic attenuation rate is insensitive to the variation of passive parameters when the active power filter with an enough feedback gain is combined. Finally, the feasibility and validity of proposed scheme is verified by Simulation using Matlab and a hybrid shunt active power filter prototype.Index Terms:Current harmonics compensation, active power filter, passive filter, generalized integrators.I .INTRODUCTIONIn the development of power electronics brings convenience to energy conversion and utilization and also causes power quality problems. As one of the key technologies in combating power grid pollution and improving the power quality, active power filter (APF) has become a new research emphasis in power electronics technology[1]-[5]. Because of high initial cost, the further application of active power filter is restricted. The HAPF(Hybrid Active Power Filter), combination of APF and passive filter (PF), can reduce the capacity of Affectively and is more suitable for the engineering application of APF for high voltage nonlinear loads.Traditionally, Passive filter has been used to eliminate the harmonic in power system due to his low cost and high efficiency. A passive filter shows the low impedance at tuned frequency to absorb current harmonic and has a good compensation performance. However, passive filter has the disadvantage of depending on the parameters of power system, susceptible to the load and power system resonant and the characteristic change due to aging. In addition, passive filter usually is designed with fixed parameters, which can not be lightly adapted for the variation operation condition.Active power filter has been developed to overcome of disadvantages of passive filter and can provide flexible and reliable compensation, but is not a cost-effective solution duet the high operation cost.Because of the drawbacks of passive filter and active power filter, the research on hybrid active power filter has become more attractive [6]-[9]. Hybrid active power filter composed of passive filter connected in series to an active power filter improves the compensation performance of passive filter remarkably, give more flexibility and reliability to filter device, and redound to the use of active power filter in high-power system avoiding the expensive initial cost.In this paper, the compensation performance of hybrid active power filter in an industrial power distribution system is analyzed by estimating the effect of different active power filter gain and parameters change. Finally, the compensation of hybrid active power filter is verified by simulation and a laboratory prototype. The passive filter of prototype was tuned at the seventh harmonic and the generalized integrators are used to eliminate the 5th, 11th and 13th harmonic current[10].II. PRINCIPLES OF CURRENT HARMONIC COMPENSATION The hybrid active power filter topology is shown in Fig.1, which consists of a three-phase pulse width modulation(PWM) voltage-source inverter (active power filter, APF)and the passive filter connected in series to APF through coupling transformer. Generally, the active power filter acts as a controlled voltage source and force the harmonic current into the hybrid active power filter. The principle of operation of current harmonic is explained by the single-phase equivalent circuit shown in Fig.2 when the feedback control is applied to the active power filter. In the current harmonic compensation strategy, the active power filter is considered as a controlled voltage source VAPF, and ZF is the impedance of passive filter, ILh is the load harmonic current, ZS is the system impedance.In order to eliminate harmonic of the system current, the active power filter is controlled as a current controlled voltage source. The active power filter imposes a voltage signal V APF that forces load harmonic current flow into the passive filter, thus improving its compensation performance in despite of the variation in the tuned frequency of the passive filter. The voltage reference of active power filter is equal toVAPF = K ⋅I sh (1) Where, K is the harmonic compensation gain. Supposing utility voltage is pure sinusoidal, the ration between the utility harmonic current and the load harmonic current is obtained, which can be used to denote the filtering characteristics of hybrid active power filter.Otherwise, K acts as a resistance to damp resonance between ZS and ZF. The larger K is selected, the lower the harmonic contents in the utility current. But thiswill increase the required power rating of the active power filter. In real condition, K is finite. Otherwise, closed loop control system will become unstable.Fig. 1 hybrid active power filter configuration.Fig. 2 Single-phase equivalent circuit of the hybrid active power filter scheme.III. ANALYSIS OF THE HYBRID FILTERPERFORMANCE IN ADISTRIBUTION SYSTEMThis section will show the compensation performance of hybrid active power filter through an example. The power distribution energizes the six medium frequency furnace, each of 300KW rate power. The medium frequency furnaces energized by six pulse uncontrolled rectifiers. The single phase diagram of the power distribution is shown in Fig.3only considering hybrid active power filter and medium frequency furnace.Fig. 3 Single-phase line diagram of the power distribution systemThe system harmonic content and harmonic criterion are shown in Table I and the 5th, 7th and 11th frequency harmonics exceed the criterion. So, the passive filters are tuned at the 5th, 7th and 11th frequency harmonic and the rate of reactive power compensation is 500kVar. The system inductance and the parameters of passive filters are shown in Table II.TABLE IIn this case, the rate of active power filter is 25KVA since it would only compensate current harmonic and the coupling transformers turns ratio is equal to 2.Fig.4 (a) shows the harmonic attenuation rate of passive filter and hybrid active power filter. The hybrid active power filter is characterized by using three single resonant filter tuned at the 5th, 7th and 11th harmonic frequency as shown inFig.3. Therefore, the passive filter presents low impedance at the 5th, 7th and 11th harmonic frequency and their neighborhood. When no active power filter is connected in series with the passive filter, the harmonic amplifying phenomenon appear in the frequency range of 200-240Hz,300-340Hz and 500-640Hz. When the active power filter with a feedback gain of 20 is combined, no harmonic amplifying phenomena occurs. Meanwhile, only adapting the passive filter, the filtering characteristic is unsatisfactory even at the 5th, 7th and 11th harmonic frequency. When the active power filter with a feedback gain of 20 is combined, the harmonic attenuation rate is increased and the filter performance of the hybrid active power filter is satisfactory at the 5th, 7th and 11th harmonic frequency.Fig.4 (b) shows the harmonic content of power system indifferent condition. When no filter is connected in parallel with the utility, the 5th, 7th and 11th harmonic current exceed the criterion seriously. After only adapting the passive filter, the harmonic current of utility is weakened but unsatisfactory adequately. When the active power filter with a feedback gain of 20 is combined, most of 5th, 7th and 11th harmonic current is forced flowing into the hybrid active power filter.Fig.5 shows how the active power filter gain K changes the harmonic attenuation rate of system current. Large value of K improves the hybrid active power filter compensation performance by increase the harmonic impedance of power system.In addition, Fig.5 shows that the low values of passive filter quality factor Q will increases the impedance at the resonant frequency and weaken the compensation performance of hybrid active power filter. The passive filter quality factor Q decides the passive filter bandwidth. Though increasing the value of active power filter gain K can compensate the adverse effect of low value of Q, which would results in the increase of active power filter output voltage required to keep the same compensation performance, thus increasing the active power filter rated power.Fig. 4 Hybrid active power filter frequency response and Harmonic Content.From Fig.5, a conclusion can be received that the quality factor of passive filter and the active power filter gain directly affect the compensation performance of hybrid active power filter when the tuned frequency is fixed. If the quality factor of passive filter is not properly selected, the active power filter gain K must beenincreased to obtain the satisfying compensation performance.Fig. 5 Hybrid active power filter frequency response for different values of passive filter quality factor Q.Fig.6 shows the hybrid active filter frequency response for different values of the system equivalent impedance. Generally, the system equivalent impedance must be lower to the passive filter equivalent impedance at the resonant frequency; otherwise, the passive can not obtain the favorable compensation performance and most load harmonic current will flow to the power system. When no active power filter is connected in series with the passive filter, if utility impedance is lower than the passive filter impedance at the tuned frequency, the harmonic attenuation rate is decreased and the filter performance of passive filter is unsatisfactory, as shown in Fig.6 (a). When the active power filter with an enough feedback gain is combined, the harmonic attenuation rate is insensitive to the variation of utility impedance, as shown in Fig.6 (b).Fig.6 also depicts that the active power filter gain K in bulky utility (small values of Zs) must bigger than that in weak utility (big value of Zs) to obtain the same compensation performance.Fig. 6 Hybrid active power filter frequency response for different values of the system equivalent impedance.The simulation results are shown in Fig.7-10. Fig.7 shows the phase-a load current and it can be seen that the load current is greatly distorted. Fig.8 presents the phase-a supply current when hybrid active power filter is working. Now it can be seen that the hybrid active power filter has improved the quality of supply current markedly and the dominating harmonic current has been eliminated effectively. Fig.9 shows the phase-a hybrid filter current. It consists of 5th, 7thand 11th harmonic current mostly.The dynamic compensation performance is studied by load perturbation response and shown in Fig.10. The change in the source current is observed smooth and steady state is reached within 2 cycles.Fig.7. Simulated current waveforms for hybrid filter compensation. Top: simulate load current; bottom: itsfrequency spectrumFig.8. Simulated current waveforms for hybrid filter compensation. Top: simulate system line current; bottom: itsfrequency spectrum.Fig.9. Simulated current waveforms for hybrid filter compensation. Top: simulate hybrid filter current; bottom: itsfrequency spectrum.Fig.10. Dynamic simulated current waveforms for hybrid filter compensation. Top: simulate system line current;middle: simulate load current; bottom: simulate hybrid filter current.IV. EXPERIMENTAL RESULTSA three-phase hybrid shunt active power filter laboratory prototype using IGBTwas implemented and tested in the compensation of a six-pulse uncontrolled rectifier, as shown in Fig.11. The VSI dc-link voltage is composed of a capacitor bank of 6800μF for a dc-link voltage 450V. The Eupec 1200V/200A IGBT are used and driven by theM57962L gate drivers. The digital control system incorporates a double DSP (TMS320C32 and TMS320F240) and CPLD circuit. The sampling period is 200 μs . Phase detection and control algorithm are completed byTMS320C32, and sampling and SVPWM program are implemented by TMS320F240. The inverter was operated at5-kHz switching frequency and was connected in series to a passive filter directly. The passive filter was tuned at the seventh harmonic (350Hz) and quality factor Q equal to 60.The parameters of the experiment circuit are shown in Table III.Fig.11 PI current controller using generalized integratorsTABLE IIISince such a single seventh harmonic tuned LC filter issued, a no negligible amount of the 5th, 11th and 13thharmonic current still remains in the supply. Thus, the generalized integrators are used to eliminate the 5th, 11th and13th harmonic current.The proposed controller based on generalized integrators in stationary frame is depicted in Fig.12, Where, *VAPF is Violate reference,*is is grid current reference.Fig.12 PI current controller using generalized integratorsWhere, Ki is the integral coefficient. The following discrete formula is use to realize the digital generalized integrators.For reducing the computation time, the generalized integrators are implemented by iterative arithmetic.When generalized integrators are used, the harmonic attenuation rate is shown in Fig.13. Fig.13 illustrates that the5th, 11th, 13th, 17th and 19th harmonic current are eliminated effectively by reason of generalized integrators.In this case, the load current consists of a mass of harmonic current. As shown in Fig.15, when only proportion controller is used, the elimination of harmonics besides tuned frequency is very limited by hybrid active power filter.With hybrid active power filter compensation using PI controller based on generalized integrators, the 5th, 7th, 11th,13th, 17thand 19th harmonics had beeneliminated effectively as shown in Fig.16. When the shunt APF is plunged, the DC linkvoltage can arrive at reference value rapidly, as shown in Fig 7...Fig.14. Experimental load current waveforms. (a) Load current. (b) Load current frequency spectrum. Fig.16. Experimental system current waveforms with hybrid filter compensation. (a) System current. (b) Systemcurrent frequency spectrum.Fig.17. Experimental system current waveforms with hybrid filter compensation.V. CONCLUSIONThe compensation performance of a shunt hybrid active power filter is proposed and analyzed. The hybrid active power filter, which combines passive filter and active power filter, has both respective merits, and is an important developing trend of filtering device. The hybrid active power filter can reduce the capacity of active power filter effectively and is more suitable for the engineering application for high voltage nonlinear loads. The compensation performance of hybrid active power filter is analyzed for different active power filter gain and parameters change. Above all, an conclusion can be obtained that the harmonic attenuation rate is insensitive to the variation of passive parameters when the active power filter with an enough feedback gain is combined. The feasibility and validity of proposed scheme is verified by Simulation using Matlab and a hybrid shunt active power filter prototype.附录二:中文翻译与10kV配电系统并联的混合型有源电力滤波器摘要本文分析了并联混合型有源电力滤波器的补偿性能。
paradigm 倾角导向滤波

paradigm 倾角导向滤波
倾角导向滤波是一种在地震数据处理中广泛应用的技术,它基于倾角参数对地震数据进行分析和滤波,从而提取出具有特定倾角的地震信号成分。
这种滤波方法的目的是将非目标信号(如噪音)滤除,保留目标信号(如地层反射)。
倾角导向滤波的核心思想是利用不同位置处的地震记录,通过导向倾角参数将多个观测点的数据组合在一起。
倾角参数可以理解为地球中不同接收点的信号来自不同方向上的能量分布,通过将这些能量分布重新组合,可以消除来自非目标信号的干扰。
在倾角导向滤波的过程中,首先需要对原始地震数据进行倾角分析,计算出每个地震记录点的倾角参数。
常用的计算方法包括多种时窗分析和谱分析技术。
接下来,根据所需的目标倾角范围,选择合适的倾角参数进行滤波。
倾角导向滤波可以应用于多种地球物理勘探领域,例如地震勘探、地震成像和地震解释。
在地震勘探中,倾角导向滤波可以帮助去除多路径效应和噪音,提高地震数据的成像分辨率。
在地震成像中,倾角导向滤波能够提取和增强具有特定倾角的地层反射信号,从而改善地下构造的解释。
在地震解释中,倾角导向滤波可以帮助识别潜在的油气藏和构造异常。
倾角导向滤波也存在一些挑战和限制。
正确选择合适的倾角参数是该方法的关键步骤,需要根据具体地质情况和勘探目标进行优化。
倾角导向滤波在处理复杂地质情况下的效果可能有限,因为在这些情况下,地震数据的能量分布可能更加复杂和难以预测。
倾角导向滤波的计算复杂度较高,需要大量的计算资源和时间。
opencv 导向滤波 膨胀 -回复
opencv 导向滤波膨胀-回复OpenCV是一个广泛应用于计算机视觉和图像处理的开源库。
在图像处理中,有很多常用的滤波算法,其中之一就是导向滤波(Guided Filter)。
而膨胀(dilation)则是图像处理中的一种基本操作,用于增强图像边缘和轮廓。
本文将详细介绍OpenCV中的导向滤波和膨胀算法,并一步一步回答与之相关的问题。
一、导向滤波(Guided Filter)导向滤波是一种基于引导图像(guide image)进行滤波的技术,通过引导图像中的局部信息调整原始图像的滤波效果。
导向滤波主要用于图像去噪、图像增强和图像融合等应用场景。
在OpenCV中,可以通过cv2.ximgproc模块来实现导向滤波。
1. 什么是引导图像(Guide Image)?引导图像是一个与滤波图像具有相同尺寸的图像,用于指导滤波操作。
它可以是原始图像本身,也可以是其他与原始图像有相关性的图像。
引导图像的作用是提供滤波过程中的导向信息,以确保保留原始图像的细节和边缘等重要特征。
2. 导向滤波的原理是什么?导向滤波的原理可以简单概括为:通过引导图像中的局部信息对原始图像进行加权滤波。
具体而言,对于原始图像中的每个像素点,导向滤波算法会计算其邻域内像素的均值和方差,然后根据引导图像中相对应位置的像素值来调整该像素的滤波权重。
这样一来,细节和边缘等重要特征就能够得到保留,而噪声和其他不重要的细节则得到抑制。
3. 如何在OpenCV中实现导向滤波?在OpenCV中,可以通过cv2.ximgproc模块的guidedFilter()函数来实现导向滤波。
该函数的基本语法如下:dst = cv2.ximgproc.guidedFilter(src, guide, radius, eps)其中,dst是滤波结果图像,src是待滤波的原始图像,guide是引导图像,radius是滤波半径,eps是滤波强度。
二、膨胀(Dilation)膨胀是一种基本的形态学运算,主要用于增强图像的边缘和轮廓。
外文文献翻译(基于单片机的数字滤波器设计
毕业设计(论文)外文文献翻译院系:信息工程学院年级专业:电子信息工程姓名: 装化学号: 20122450236附件:digital filter design外文文献:digital filter designAbstract:With the information age and the advent of the digital world, digital signal processing has become one of today's most important disciplines and door technology。
Digital signal processing in communications,voice,images, automatic control, radar, military,aerospace,medical and household appliances,and many other fields widely applied. In the digital signal processing applications,the digital filter is important and has been widely applied.Keyword:SCM; Proteus, C language;Digital filter1、figures Unit on :Analog and digital filtersIn signal processing,the function of a filter is to remove unwanted parts of the signal,such as random noise, or to extract useful parts of the signal, such as the components lying within a certain frequency range。
A Really Friendly Guide to Wavelets(中文版)-RockyFanYi-20100328
A Really Friendly Guide toWavelets中文版2010-3-28原版作者© C. Valens, 1999c.valens@中文版翻译Rocky XURockyFanYi@声明这份指南是写给工程师看的,它不是为数学家写的。
但这并不意味着里面没有数学,只是没有数学证明而已。
以我之浅见,数学论文中充斥着乱糟糟的证明,那让人觉得非常枯燥。
文中会为读者指出数学证明的适当的参考文献。
我希望文中给出的方程能有助于阐明问题,但是要理解这个理论并不需要理解所有这些方程。
然而,要理解本指南,读者还是需要一个工程水平的数学背景的,一些信号处理理论可能也用得上。
我认为本指南中提供的信息是正确的。
但是,万一由于文中任何错误、令人误解的陈述或者其他任何内容引起任何不好的后果,本人不承担任何责任。
如果你发现了文中有任何错误、不完整或不清楚的内容,请告诉我,以便我来改进这份指南。
目录1. 引言2. 连续小波变换3. 小波的性质4. 离散小波5. 一个带通滤波器6. 小插曲:一个约束条件7. 尺度函数8. 子带编码9. 离散小波变换10. 结束语11. 参考文献1. 引言由傅里叶变换的理论可知,一个信号可以被表示为一系列(可能是无穷多个)正弦和余弦函数之和,这个和也被称作傅里叶展开式。
然而,傅里叶展开式有个很大的缺点,就是它只有频率解析,而没有时间解析。
这就意味着,虽然我们可以确定一个信号中的所有频率,但我们不知道它们出现在什么时间。
为了克服这个问题,在过去的几十年里,人们开发出了多种解决方案,它们都在一定程度上可以同时在时域和频域表示一个信号。
这些时-频联合表示法背后的思想是,把感兴趣的信号切割为多个部分,然后对各个部分单独进行分析。
显然,用这种方式分析信号可以得到不同频率分量出现的时间和位置的更多的信息,但是它也同时带来一个重要问题:如何切割信号?假设我们想要确切地知道在某个时间上出现的所有频率分量,我们使用Dirac脉冲1仅把这个非常短的时间窗切割出来,将其转换到频域,于是…问题出现了。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:在本文中,我们提出了一种新型的显式图像滤波器引导滤波器。
引导过滤器从本地线性模型得出,通过考虑引导图像的内容(可以是输入图像本身或其他不同图像)来生成滤波输出。
引导滤波器可以像流行的双边滤波器一样作为边缘保持平滑算法执行,但在边缘附近具有更好的行为。
它还具有与消隐拉普拉斯矩阵[2]的理论连接,因此与平滑算子相比更通用的概念,并且可以更好地利用引导图像中的结构。
此外,引导过滤器具有快速和非近似的线性时间算法,其计算复杂度与过滤核大小无关。
我们证明,引导过滤器在一个伟大的是有效和高效的各种计算机视觉和计算机图形应用,包括降噪,细节平滑/增强,HDR压缩,图像消光/羽化,雾度去除和联合上采样。
1.介绍计算机视觉和计算机图形学中的大多数应用涉及图像滤波的概念,以减少噪声和/或提取有用的图像结构。
像图像模糊/锐化,边缘检测和特征提取等广泛使用的简单显式线性平移不变(LTI)滤波器,如高斯滤波器,拉普拉斯滤波器和Sobel滤波器[3]。
LTI滤波还包括求解泊松方程的过程,例如在高动态范围(HDR)压缩[4],图像拼接[5]和图像消隐[6]中,其中滤波内核被隐式定义为一个均匀的拉普拉斯矩阵。
LTI滤波器的内核是空间不变的,与任何图像内容无关。
但是在许多情况下,我们可能希望在过滤过程中包含来自给定指导图像的附加信息。
例如,在着色[7]中,输出色度通道应具有与给定亮度通道一致的边缘;在图像消光[2]中,输出alpha遮罩应该捕获像图像中的头发那样的薄结构。
实现这一目的的一种方法是通过考虑引导图像来优化直接对未知输出实施一些约束的二次函数。
然后通过求解用引导图像的信息编码的大稀疏矩阵来获得解。
这个不均匀的矩阵隐含地定义了一个转换变量的过滤内核。
这种方法广泛应用于许多应用,如着色[7],图像消光[2],多尺度分解[8]和雾度去除[9]。
虽然这种基于优化的方法通常产生最先进的质量,但伴随着长时间的计算时间。
另一种方法是使用引导图像显式构建过滤器内核。
[10]中提出的双边滤波器在[1]中受欢迎,后来在[11]中广泛应用,也许是最流行的滤波器之一。
其像素处的输出是附近像素的加权平均值,其中权重取决于引导图像中的浓度/颜色相似度。
引导图像可以是滤波器输入本身[1]或另一个图像[11]。
双边过滤器可以平滑小波动并保留边缘。
虽然这种过滤器在许多情况下有效,但它可能在边缘附近有不希望的梯度反转伪像[12,13,8](在3.4节进一步解释)。
其快速实现也是一个具有挑战性的问题。
最近的技术[14,15,16,17]依靠量化方法加速,但可能牺牲精度。
在本文中,我们提出了一种新型的显式图像滤波器,称为引导滤波器。
滤波输出本地是引导图像的线性变换。
该滤波器具有像双边滤波器一样的边缘保持平滑特性,但不会受到梯度反转伪像的影响。
它也与matting拉普拉斯矩阵相关[2],因此是一个更通用的概念,适用于超出“平滑”范围的其他应用。
此外,引导滤波器具有用于灰度和彩色图像的O(N)个时间(以像素数N为单位)精确算法。
实验表明,引导滤波器在各种应用中的质量和效率方面表现非常好,如降噪,细节平滑/增强,HDR压缩,图像消光/羽化,雾度去除和联合上采样。
2.相关工作2.1双边滤波器双边滤波器将像素处的滤波器输出计算为相邻像素的加权平均值。
它平滑图像同时保留边缘。
由于这个好的属性,它被广泛应用于降噪[18],HDR压缩[12],多尺度细节分解[19]和图像抽象[20]。
它被推广到[11]中的联合双边滤波器,其中权重是从另一个引导图像而不是滤波器输入计算的。
当滤波器输入不可靠以提供边缘信息时,例如当它非常嘈杂或是中间结果时,联合双边滤波器是特别有利的。
联合双边滤波器适用于闪光/无闪光去噪[11],图像颠覆[21]和图像去卷积[22] 然而,已经注意到[12,13,8]双边滤波器可能在细节分解和HDR压缩中具有梯度反转伪像。
原因是当像素(通常在边缘上)周围几乎没有相似的像素时,高斯加权平均值是不稳定的。
双边过滤器的另一个问题是其效率。
蛮力实现在O(Nr2)时间,当内核半径r大时,这是非常高的。
在[14]中,在离散空间色栅中获得近似解。
最近,基于直方图开发了O(N)时间算法[15,16]。
Adams等[17]提出了彩色图像的快速算法。
所有上述方法都需要很高的量化程度来达到令人满意的速度,但是以牺牲质量降级为代价。
2.2基于优化的图像过滤一系列方法优化二次成本函数并求解线性系统,这相当于通过逆矩阵隐式过滤图像。
在图像分割[23]和着色[7]中,该矩阵的亲和度是颜色相似度的高斯函数。
在图像消光中,一个哑光拉普拉斯矩阵[2]被设计为强制α无光泽作为图像颜色的局部线性变换。
该矩阵也适用于雾霾[9]。
[8]中的加权最小二乘法(WLS)滤波器根据图像梯度调整矩阵相关度,并产生输入图像的无卤素分解。
虽然这些基于优化的方法经常产生高质量的结果,但解决相应的线性系统是耗时的。
已经发现,基于优化的滤波器与显式滤波器密切相关。
在[24]中,Elad表明双边滤波器是求解高斯亲和矩阵的一个Jacobi迭代。
在[25] Fattal定义了边缘避免小波近似WLS滤波器。
这些显式过滤器通常比基于优化的过滤器更简单和更快。
3.2 边缘保留过滤图1(上图)示出了具有各种参数组的引导过滤器的示例。
我们可以看到它具有边缘保持平滑特性。
这可以直观地解释如下。
考虑I = p 的情况。
很清楚如果e = 0,则(4)的解是ak = 1,bk = 0。
如果e> 0,我们可以考虑两例:情况1:“扁平补丁”。
如果图像I在ωk中是常数,则(4)由ak = 0和bk = pk 求解;情况2:“高方差”。
如果图像我在ωk内变化很大,那么ak变得接近1,而bk接近0。
当ak和bk平均得到ai和bi时,在(8)中组合得到输出,我们得到如果一个像素在“高方差”区域的中间,那么它的值是不变的,而如果它位于“平坦贴片”区域的中间,其值成为附近像素的平均值。
更具体地,参数e给出“平坦贴片”或“高方差”的标准。
具有小于e的方差(σ2)的贴片被平滑化,而具有远大于e的方差的贴片被保留。
e在引导过滤器中的影响与双边过滤器(2)中的范围方差σr2相似。
两个参数确定“什么是边缘/高度方差补丁应该保留”。
图。
1(下图)显示了双边滤波器的结果作为比较。
3.4梯度保持滤波虽然引导过滤器是像双边过滤器一样的边缘保持平滑滤波器,但它避免了可能在细节增强和HDR压缩中出现的梯度反转伪像。
图。
图4示出了细节增强的1-D示例。
给出输入信号(黑色),其边缘保持平滑输出用作基本层(红色)。
输入信号和基础层之间的区别是细节层(蓝色)。
它被放大以提高细节。
增强信号(绿色)是增强细节层和基底层的组合。
这种方法的详细描述可以在[12]中找到。
对于双边滤波器(图4左),基层与边缘像素处的输入信号不一致。
这是因为它们周围几个像素具有相似的颜色,高斯加权平均数据很少,变得不可靠。
所以细节层有很大的波动,如图所示,重组信号具有相反的梯度。
另一方面,引导过滤器(图4右)更好地保留I中的梯度信息,因为基层的梯度在边缘附近为∇q ≈¯ I。
边缘的形状在复合层中保持良好。
3.5与Matting拉普拉斯矩阵的关系引导过滤器不仅可以用作平滑算子。
它也与matting拉普拉斯矩阵[2]密切相关。
这为引导过滤器带来了新的见解,并激发了一些新的应用。
在封闭形式的matting解决方案[2]中,matting拉普拉斯矩阵从局部线性模型推导出来。
与计算每个窗口的局部最优值的引导过滤器不同,闭式解决方案寻求全局最优。
为了解决未知的alpha matte,该方法将以下成本函数最小化:其中α是以其矩阵形式表示的未知α无序,β是约束(例如,微分),L是N ×N消隐拉普拉斯矩阵,Λ是用约束权重编码的对角矩阵。
该优化问题的解决方案是通过求解线性系统给出:(L +Λ)α=Λβ。
消隐拉普拉斯矩阵的元素由其中δij是Kronecker delta。
比较(11)与(9),我们发现消光拉普拉斯矩阵的元素可以直接由引导过滤核重量给出:按照[24]中的策略,我们可以进一步证明(参见补充材料)导引过滤器的输出是优化中的一个雅可比迭代(10)。
如果β是一个相当好的无光泽猜测,我们可以运行一个Jacobi步骤,并通过引导滤波过程获得(10)的近似解:αi ≈?Wij(I)βj。
在第4节中,我们将此属性应用于图像消光/羽化和雾霾去除。
3.6 O(N)时间精确算法双向过滤器上的引导过滤器的另一个优点是它自动具有O(N)个时间精确算法。
O(N)时间意味着时间复杂度与窗口半径r无关,因此我们可以在应用程序中自由使用任意的内核大小。
(1)中的过滤过程是一个平移变体卷积。
当内核变大时,其计算复杂度增加。
而不是直接执行卷积,我们从其定义(5)(6)(8)计算滤波器输出。
这些方程中的所有求和都是箱式滤波器(?i∈ωkfi)。
我们应用O(N)时间积分图像技术[28]来计算盒式滤波器的输出。
因此,可以在O(N)时间内计算引导过滤器。
O(N)时间算法可以容易地扩展到RGB彩色引导图像。
当边缘或细节在任何一个通道中都不能区分时,使用彩色引导图像进行滤镜是必要的。
为了推广到引导图像,我们将局部线性模型(3)重写为:这里Ii是3×1色矢量,ak是3×1系数向量,qi和bk是标量。
彩色引导图像的引导过滤器变为:这里Σk是ωk中I的3×3协方差矩阵,U是3×3单位矩阵。
求和仍然是盒子滤波器,可以在O(N)时间内计算。
我们用2.0Hz的Intel Core 2 Duo CPU在笔记本电脑中实验运行时间。
对于灰阶导向滤镜,需要80ms处理1百万像素的图像。
作为比较,[15]中的O(N)时间双边滤波器需要42ms,使用32个分组的直方图,使用64个分组的85ms。
注意,导向滤波器算法是非近似的,适用于高位深度的数据,而O(N)时间双向滤波器可能具有明显的量化伪像(见图5)。
[16]中的算法需要使用8个bin(使用作者网站上的公共代码)每百万像素1.2秒。
对于RGB引导图像,引导过滤器需要大约0.3秒才能处理1百万像素的图像。
[16]高维双边滤波器的算法平均每10万像素RGB图像处理大约10秒。
4应用与实验结果图5。
O(N)时间双边滤波器的量化伪像。
(a)输入HDR图像(32位浮点数,通过线性缩放显示)。
(b)使用[15](64个箱)中的O(N)双边滤波器的压缩图像。
(c)使用导向过滤器的压缩图像。
该图最好在本文的电子版中查看。
细节增强和HDR压缩。
第3.4节描述了细节增强的方法。
对于HDR压缩,我们压缩基本层,而不是放大细节层。
图6示出了用于细节增强的示例,图7显示了HDR压缩的示例。