周转轮系复合轮系
轮系及其分类

(1)Z1 Z3
3、找出轮系之间的运动关系
1 3
1 3
-
3'
2
2' 4
13
H
输出
1'
4、联立求解:
i1H
1 H
Z1
Z 3 Z1
1 Z1Z2Z3
Z2Z3
例6:
电动卷扬机减速器 Z1=24,Z2=48,Z2'=30, Z3=90,Z3'=20,Z4=30, Z5=80,求i1H
(H,5为一整体) H
2、首末两轴不平行
用箭头表示
-
3、所有轴线都平行
i
1 5
(1)m
所有从动轮齿数的乘积 所有主动轮齿数的乘积
m——外啮合的次数
4、所有齿轮的几何轴线不都平行,但首、尾两轮的轴 线互相平行
仍可在传动比的计算结果中加上"+"、"-"号来表示主、 从动轮的转向关系。
-
§6-3 周转轮系传动比
反转法
假想给整个轮系加上一
-
例4:在图所示的轮系中,设已知各轮的齿数为:
试求轴Ⅰ、轴Ⅱ之间的传动比。 解:这是一个混合轮系。
(1)首先区分各个基本轮系: 1-2-3-H 周转轮系
4-4‘-5-1’-3‘ 定轴轮系 (2)分别列出各基本轮系传动 比的计算式:
在1-2-3-H 中
即
(a)
-
在4-4‘-5-1’-3‘ 中 (3)联系条件
第六章 轮系
-
§6-1 轮系及其分类
轮系是由一系列齿轮所组成的传动装置。 定义:这种由一系列齿轮组成的传动系统称为
轮系。 它通常介于原动机和执行机构之间,把原动机
轮系
i1H =1-(-99×101/100×100)=1.9999 iH1=n H / n 1 =1/i1H =0.5
表示行星架H与齿轮1的转向相同。
用画箭头法标出转化轮系中各构件的转向关系,如图所示。
29
例: 如图所示周转轮系。已知Z1=15, Z2=25, Z3=20, Z4=60,n1=200r/min, n4=50r/min ,且两太阳轮1、4 转向相反。试求行星架转速n H及行星轮转速n3。
2 O1 H
1
3
3
2
n 2
H
n
O
H
n
1
1
n 3 -n H
2
3
H 1
3 2
n3H = n 3-n H n2H = n 2-n H H n1H = n 1-n H
1
a) 原周转轮系
b) 原周转轮系的转化轮系
周转轮系及转化轮系中各构件的转速
构件名称 原来的转速
太阳轮1
n1
行星轮2
n2
太阳轮3
n3
行星架H
nH
转化轮系中的转速
n1H=n1-nH
n2H=n2-nH n3H=n3-n H nHH=nH-nH=0
18
2.周转轮系的传动比计算
周转轮系的传动比(3/5)
转化轮系中,齿轮1对齿轮3的传动比
i1H3
n1H n3H
n1 nH n3 nH
z2 z3 z1 z2
一般表达式为 :
iG HKnnG K H H
n4
= n1 3000 i14 120
=25r/min, 转向如图
周转轮系的传动比(1/5)
5.3 周转轮系及其传动比计算
周转轮系复合轮系

例:如图所示的周转轮系中,已知各 轮齿数为Z1=100, Z2=99, Z3=100, Z4=101 ,行星架H为原动件,试求传 动比iH1=? 解: iH1=n H / n 1 i14=(n 1 - n H )/ (n 4 - n H ) =1- n 1 / n H =-Z2Z4/Z1Z3 =1- i1H i1H =-(1-99x101/100x100)=-1/10000 iH1=n H / n 1 =1/i1H =-10000 传动比为负,表示行星架H与齿轮1的转向相反。
第31讲
周转轮系\复合轮系
周转轮系传动比的计算
具有一个自由度的周转轮 系称为简单周转轮系,如 下图所示;将具有两个自 由度的周转轮系称为差动 轮系,如下图所示。
F=3x(N-1)-2PL-PH F1=3x3-2x3-2=1 F2=3x4-2x4-2=2
自由度表示原动件的数目。
周转轮系传动比的计算
例:如图所示轮系中,已知各轮 齿数Z1=20, Z2=40, Z2 ` =20 Z3=30, Z4=80。计算传动比i1H 。 周转轮系:轮2`,3,H 解: 分解轮系 定轴轮系:轮1,2 周转轮系传动比:
i
H 2/ 4
H n2 n2 nH z4 H =-4 n4 n4 nH z2
不能直接用定轴轮系传动 比的公式计算周转轮系的 传动比。可应用转化轮系 法,即根据相对运动原理, 假想对整个行星轮系加上 一个与行星架转速n H大 小相等而方向相反的公共 转速-n H,则行星架被固 定,而原构件之间的相对 运动关系保持不变。这样, 原来的行星轮系就变成了 假想的定轴轮系。这个经 过一定条件转化得到的假 想定轴轮系,称为原周转 轮系的转化轮系。
轮系的功用
4.实现变速传动
机械设计基础第五章轮系

2. 根据周转轮系的组合方式,利用周转轮系传动比计算公式求
03
出周转轮系的传动比。
实例分析与计算
1
3. 将定轴轮系和周转轮系的传动比相乘,得到复 合轮系的传动比。
2
4. 根据输入转速和复合轮系的传动比,求出输出 转速。
3
计算结果:通过实例分析和计算,得到了复合轮 系的输出转速。
05 轮系应用与实例分析
仿真结果输出
将仿真结果以图形、数据等形式输出,以便 进行后续的分析和处理。
实验与仿真结果对比分析
01
数据对比
将实验数据和仿真数据进行对比 ,分析两者之间的差异和一致性 。
结果分析
02
03
优化设计
根据对比结果,分析轮系设计的 合理性和可行性,找出可能存在 的问题和改进方向。
针对分析结果,对轮系设计进行 优化和改进,提高轮系的性能和 稳定性。
04 复合轮系传动比计算
复合轮系构成及特点
构成
由定轴轮系和周转轮系(或几个周转轮系)组合而成,称为复合轮系。
特点
复合轮系的传动比较复杂,其传动比的计算需结合定轴轮系和周转轮系的传动比计算公式进行。
复合轮系传动比计算公式
对于由定轴轮系和周转轮系组成的复合轮系,其传动比计算 公式为:i=n1/nK=(Z2×Z4×…×Zk)/(Z1×Z3×…×Zk-1)×(1)m,其中n1为输入转速,nK为输出转速,Z为各齿轮齿数 ,m为从输入轴到输出轴外啮合齿轮的对数。
火车车轮与轨道
通过轮系保证火车在铁轨 上的平稳运行和导向作用 。
船舶推进器
利用轮系将主机的动力传 递给螺旋桨,推动船舶前 进。
军事装备中轮系应用举例
坦克传动系统
采用轮系实现坦克发动机的动力 输出与行走机构的连接,确保坦 克在各种地形条件下的机动性。
机械原理+阶段练习四及答案(8-10-11)word版本

华东理工大学网络教育学院机械原理课程阶段练习四(第8章—第10章—第11章)第八章 齿轮系及其设计一、填空题1、周转轮系根据自由度不同可分为 差动轮系 和 行星轮系 ,其自由度分别为 2 和 1 。
2、组成周转轮系的基本构件有: 太阳轮 ; 行星轮 , 系杆 。
3、K i 1与H K i 1不同,K i 1是 构件1和K 的传动比 ;HK i 1是 构件1和K 相对系杆H 的传动比 。
二、简答题1、什么是复合轮系?写出计算复合轮系传动比的步骤。
复合轮系:由定轴轮系和周转轮系或者由两个以上的周转轮系组成的轮系。
步骤:(1)划清组成复合轮系中的定轴轮系和周转轮系;(2)分别采用定轴轮系和周转轮系传动比的计算公式列出计算方程式; (3)根据这些轮系的组合方式联立解出所求的传动比。
2、在图示轮系中,根据齿轮1的转动方向,在图上标出蜗轮4的转动方向,并指出蜗轮4的旋向。
答:蜗轮4为顺时针转动,蜗轮4的旋向为左旋。
3 在图示的手摇提升装置中,已知各轮齿数为:z 1=20,z 2=50,z 3=15,z 4=30,z 6=40,z 7=18,z 8=51,蜗杆z 5=1,且为右旋,试求传动比i 18;并指出提升重物时手柄的转向。
答:所示轮系为定轴轮系;各轮转向为:8-逆时针、7-顺时针、4-箭头向左、3-箭头向上、2-箭头向上、1-箭头向上;传动比:67.56618=i4 在图示的蜗杆传动中,试分别在左右两图上标出蜗杆1的旋向和转向。
答:左图为右旋蜗杆;右图蜗杆逆时针转动。
三 计算题1 在图示的轮系中,已知z 1=20,z 2=30,z 3=18,z 6=48,齿轮1的转速n 1=150 r/min ,试求系杆 H 的转速n H 的大小和方向。
1.667.534124114-=⨯-=--=Z Z Z Z i H H Hωωωω因为:04=ω所以:667.511+=Hωω m in/5.22r H =ω2、在图中,已知:Z 1=20 ,Z 2=30 ,Z 2’=25,Z 3=75,Z 4=30,Z5=25,。
周转轮系和复合轮系的应用

4、实现变速传动。 周转轮系实现变速传动,不需要采用滑移齿轮,因而变速箱轴向尺寸小。且由于在 变速过程中,各对齿轮不需离合,经常处于啮合状态,故使变速比较可靠。如图所示, 利用具有三个中心轮的行星轮系作为某专用机床的进给机构,使结构紧凑。运动由轮 1 输入,轮 3 输出,经与轮 3 固连的丝杠,并通过螺旋副,使进刀箱作进给运动。
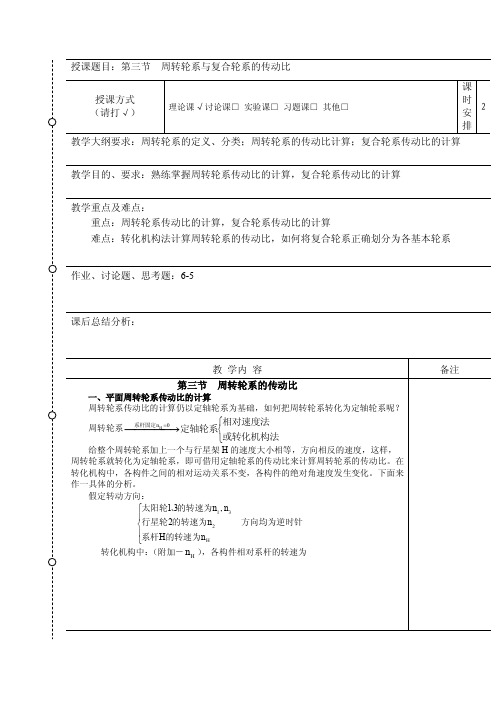
教 学内 容 第四节 周转轮系和复合轮系的应用
1、实现大传动比传动 如图所示,已知 z1 100, z 2 101, z 2 100, z3 99. 试求传动比 i H 1 ? 解:依题
备注
n3 0,
H i13
ห้องสมุดไป่ตู้
z z n1H n1 n H (1) 2 2 3 H n3 n H z1 z 2 n3 n1 n H 101 99 0 nH 100 100 n 得: H 10000 i H 1 n1
i13 图所示汽车后桥差速器, 1、 2、 3、 H (4) 组成差动轮系,
H
z n1 n H 3 1 , n3 n H z1
n4 n H , 所 以 n 4
n1 r L 。 n3 r L
n1 n3 , 当 汽 车 沿 直 线 行 驶 时 , n1 n3 n 4 。 转 弯 时 , 2
行星架转10000转时,轮1才转1转,转向相同。
该轮系仅用两对齿轮,便能获得这么大的传动比,使传动机构非常紧凑。 2、实现运动的合成:应用差动轮系,可将两个构件的输入运动,合成为另一构件的 运动输出。 (在差动轮系中,需要两个原动件,轮系才有确定的相对运动,因此应用差动 轮系, 可将两个构件的输入运动合成为另一个构件的运动输出。 ) 图所示为滚齿机的差动 轮系,滚齿时,由齿轮 4 传来的运动输给中心轮 1,使其得到转速 n1 (称为分齿运动) ;
14复合轮系
输入轴转100圈,输出轴只反向转一圈。可知这种少齿数差传动机构可获得很大的单级传动比。
几种特殊的行星传动简介
1.渐开线少齿差行星传动 具体工作原理见课本。
dh ds
oh
o1
os
a
o2
一、渐开线少齿差行星齿轮传动
其齿廓曲线为普通的渐开线,齿数差一般为z2-z1=1~4。 优点:
①传动比大,一级减速i1H可达135,二级可达1000以上。 ②结构简单,体积小,重量轻。与同样传动比和同样
功率的普通齿轮减速器相比,重量可减轻1/3以上。
③加工简单,装配方便。
④效率较高。一级减速η=0.8~0.94,比蜗杆传动高。
缺点:
由于上述优点,使其获得了广泛的应用
①只能采用正变位齿轮传动,设计较复杂。存在重叠干涉现象
复合轮系
复合齿轮系
§5-4 复合轮系及其传动比
– 由几个基本周转轮系或定轴轮系和周转轮系组成的轮系称为 复合轮系。
– 解复合轮系问题的首要任务是正确区分各个基本周转轮系和 定轴轮系,然后分别列出计算这些轮系的方程式,找出其相 互联系,最后连立求解方程,求出待求的参数。
– 正确区分各个轮系的关键在于找出各个基本周转轮系。 – 找周转轮系的一般方法是:先找出行星轮,支持行星轮的构
②传递功率不大,N≤45KW。 受输出机构限制 ③径向分力大,行星轮轴承容易损坏。 ∵α’大
2.摆线针轮行星传动
摆线针轮结构分解图
摆线针轮行星传动图
摆线形结构图解
可以证明,摆线针轮行星传动能保证传动比恒定不变针齿销数与摆
线轮齿数的齿数差(z1-z2)只能为1,所以其传动比为:
轮系的类型和应用.

H
5 1
H1
H2
1
3
3
4
6
轮系的功用
1、实现相距较远的两轴之间的传动
2.实现分路传动
IV
VI
V
主轴
滚齿机上实现滚刀与轮坯范成运动 的传动简图。
3.实现变速传动
a) 1
2
b)
B 5
A
2
H
6 1’
4
1
2’
3
4.实现换向传动
a)
1
b)
1
2 4
a
3
2
3
5、实现大速比和大功率传动 行星轮系可以由很少几个齿轮获得很大的 传动比,如下图中,若z1=100,z2=101, z2′=100,z3=99,可以求得从系杆到轮1的传 动比
轮系运转时,至少有一个齿轮的几何轴线绕其他 固定轴线作回转运动。
二、周转轮系:
2
4
H O
O
基本周转轮系的组成: 3 1、行星轮: 几何轴线是运动的,至少有一个或有多个。 2、中心轮(太阳轮): 与行星轮啮合的齿轮,用“K”表示。最多有两个; 特殊时有一个。 3、系杆(转臂): 支持行星轮的构件.用“H”表示。只有一个。
§6-1
轮系类型:
轮系的类型和应用
轮系:由一系列齿轮组
成的齿轮传动系统。 一、定轴轮系: 在轮系运转时,其各 轮轴线相对机架的位置都 是固定的。如图示。
1、平面定轴轮系:
在定轴轮系中,所有齿轮的轴线均平行;
2、空间定轴轮系:
在定轴轮系中,所有齿轮的轴线不都平行。 1 2 3 4 5 6 7
1
2 3 4
4 13
第8章-轮系-复合轮系
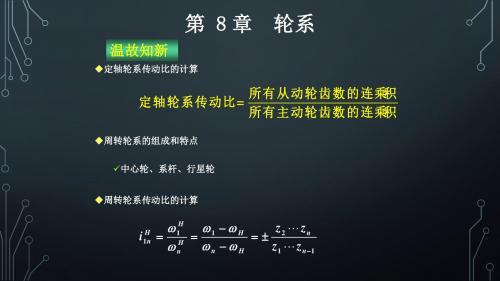
温故知新
◆定轴轮系传动比的计算
轮系
所有从动轮齿数的连乘 积 定轴轮系传动比 所有主动轮齿数的连乘 积
◆周转轮系的组成和特点
中心轮、系杆、行星轮 ◆周转轮系传动比的计算
i 1H n
z2 zn 1H 1 H H n H z 1 z n 1 n
四、实现换向传动:
在主轴转向不变的条件下,可以改变从动轴的转向。
(车床走刀丝杠的三星转向机构)
(导弹发射快速反应装置)
五、实现运动的合成
差动轮系可以把两个运动合成为一个运动。
i
H 13
z3 n1 n H 1 n3 n H z1
1 ( n1 n 3 ) 2
nH
支撑行星轮的构件就是系杆;
•
几何轴线与系杆的回转轴相重 合,且直接与行星轮相啮合的定 轴齿轮就是中心轮,这样便组成 了一个周转轮系 定轴轮系
• 定轴轮系:无行星轮存在,则为
§8-4
复合轮系的传动比
轮系分解关键:将周转轮系分离出来。 传动比求解思路:
将复合齿轮分解为基本齿轮,分别列 出传动比计算公式,找出联系,联立求 解。
z1=z3
差动轮系的运动合成特性,被广泛应用于机 床、计算机构和补偿调整等装置中。
六、实现运动的分解
差动轮系可以将一个基本构件的主动转动按所 需比例分解成另两个基本构件的不同转动。
汽车后桥的差动器能根据汽车不同的行驶状态,
自动将主轴的转速分解为两后轮的不同转动。
n1 r L n3 r L
§8-5
轮系的工程应用
一、实现分路传动:
利用轮系可以使一个主 动轴带动若干个从动轴
同时旋转,并获得不同周转轮系,可以在使用很 少的齿轮并且也很紧凑的条件 下,得到很大的传动比。
周转轮系与复合轮系的传动比
既然周转轮系的转化轮系为一定轴轮系, 就可应用定轴轮系传动比的公式进行计算。
z z n1H n1 nH (1)1 2 3 H n3 n3 nH z1 z 2
H i13 为转化轮系的传动比,并不是原周转轮系的传动比。但 n1、n3、n H 三个运动参
数中,若已知任意两个,就可确定第三个,从而求出周转轮系的传动比。 一般公式: n H nm n H 在转化轮系中由 m到n各从动齿轮齿数乘积 H imn m (1) K ; H nn n H 主动 nn
教 学内 容
备注
机构 太阳轮 1 太阳轮 3 行星轮 2 行星架 H 机架 即
H i13
原有转速
转化机构中的转速
n1
n3
n1H n1 nH
H n3 n3 nH
n2
nH
n机架 0
H n2 n2 n H H nH nH nH 0
H n机架 0 nH nH
i12
n1 z 1 n2 z2
得n a n 2
z1 20 n1 300 200rpm z2 30
教 学内 容
H iab
备注
na n H z b nb nH za
200 nH 80 0 nH 20 nH 40rpm.
(2) i13
H
若 n1 1450r / min , n H
n1 1450 46.77r / min i1H 31
=18, =30, Z g 例 3、在图示双螺旋桨飞机减速器中,已知 Za=26,Zg=20,Zb=66, Z a
=66,若 na=15000rpm,求 nP 及 nQ 的大小及转向。 Zb
轮系的分类及其应用特点
周转轮系
3.混合轮系 在轮系中,既有定轴轮系又有周转轮系。
二、轮系的应用特点
1.可获得很大的传动比 2.可作较远距离的传动 3.可以方便地实现变速和变向要求 4.可以实现运动的合成与分解
1.可获得很大的传动比
一对齿轮传动的传动比不能过大(一 般i12 =3~5,imax≤8),而采用轮系传动可 以获得很大的传动比,Байду номын сангаас满足低速工作的 要求。
2.可作较远距离的传动
两轴中心距较大 时,如用一对齿轮传 动,则两齿轮的结构 尺寸必然很大,导致 传动机构庞大。
3.可以方便地实现变速和变向要求
滑移齿轮变速机构
利用中间轮变向机构
轮系应用举例
§6-1 轮系分类及其应用特点
轮系——由一系列相互啮合的齿轮组成的传动 系统。
一、轮系的分类
二、轮系的应用特点
一、轮系的分类
1.定轴轮系 2.周转轮系 3.混合轮系
1.定轴轮系 当轮系运转时,所有齿轮的几何轴线位置相
对于机架固定不变,也称普通轮系。
定轴轮系
2.周转轮系
轮系运转时,至少有一个齿轮的几何轴线相 对于机架的位置是不固定的,而是绕另一个齿轮
机械原理(朱理主编)第7章 轮系
二、周转轮系传动比的计算
3 H
O2 3 2 3
2 O2 H
1.分析思路: 定轴轮系
O1
H O3 4 1
O1 O3 1 4 OH
系杆H运动
1
OH
周转轮系
轮
系杆H不动 2.处理方法: 固定系杆H(假想) 转化轮系(定轴轮系)
原轮系
转化轮系
周转轮系的转化机构(转化轮系):
箭头表示在 转化轮系中的方向
二、实现相距较远的两轴 之间的传动
采用周转轮系,可以在使用
很少的齿轮并且也很紧凑的条 件下,得到很大的传动比。
三、 实现变速传动:
在主轴转速不变的条件下,利用轮系可使从动轴得到若 干种转速,从而实现变速传动。
3
右
3’
7
7’
2 1
4
5
6
z z z z z z z z
2 3 4 , , 1 2 3
7
ω6 的方向如图所示。
§7-3
一、周转轮系
周转轮系的传动比
O2 3 2 H O1 1 OH 4 H O3 1 O1 O3 1 4 OH H 3 3 2 O2
F 3 4 2 4 2 2
2 3 O2 H O1 OH 1
轮3固定 : 差动轮系:F=2 行星轮系:F=1
F 3 3 2 3 2 1
6
4 5
5
Z2 Z4 i14 = - ——— Z1 Z3
Z2 Z4 Z6 i16 = ———— Z1 Z3 Z5
i18 =
Z2 Z4 Z6 Z8 Z1 Z3 Z5 Z7
●
答案 练习
答案 练习
右旋蜗杆
例1:
已知:n1=500r/min,Z1=20,Z2=40,Z3=30,Z4=50。
机械原理教案19周转轮系及复合轮系传动比计算

内 容图8-8如图8-8b 所示的转化轮系中,齿轮1对齿轮3的传动比为H 11H 23H 13H 3H 123n n n z z i n n z z n -⨯===--⨯ 推广为周转轮系传动比一般式:H GK i = H G n= n G -n H=± 从G 到K 所有各对啮合齿轮中从动轮齿数的连乘积(8-2)H K n n K -n H 从G 到K 所有各对啮合齿轮中主动轮齿数的连乘积 (二)周转轮系传动比计算时的注意事项1.式(8-2)中,由于G 、H 、K 的转速直接相减,故该式只能用于G 、K 、H 的轴线互相平行的场合;2.式(8-2)齿数比前面一定有“+”号或“-”号。
至于应该取“+”号还是“-”号,与G 、K 两轮的真实转向无关,而取决于转化轮系中G 、K 两轮的转向关系,当转向相同时为“+”号,转向相反时为“-”号;3.若已知G n 、H n 、K n 中任意两个转速,则可求得第三个转速。
需注意的是,这里的各转速均为代数值,在计算时要带有相应的正、负号;4.由于行星轮系中有一个中心轮固定,如中心轮K 固定,则K n =0,代入式(8-2)得:H GK i =G H GH H10n n i n -=--,此时H GH GK 1i i =-,这就是行星轮系的传动比计算公式; 5.G H H GK K H n n i n n -=-GK i ≠,GK i =G Kn n ; 6.周转轮系中,轮的真实转向只能根据计算结果来确定,而不能画箭头来确定。
【例8-2】在如图8-9所示轮系中,已知1z =100,2z =101,2z '=100,3z =99,求传动比H1i 。
解 这是一个2、2'为行星轮,H 为行星架,1、3为中心轮的行星轮系。
1H 1H 23H 133H H 12101990100100n n n n z z i n n n z z --⨯===+='--⨯H 1H 131019911110010010000i i ⨯∴=-=-=⨯ 则H1i =10000,结果表明,若中心轮1转1圈,则行星架H 同方向转10000圈。
第七章_轮系
本章要解决的问题:
复合轮系
轮系的运动分析(包括传动比i 的计算和判断从动轮转向)
§7-2 定轴轮系传动比的计算
一、轮系的传动比
轮系始端主动轮与末端从动轮的转速之比值,称为轮系的
传动比,用i 表示。
i1k =
n1 nk
式中 n1 ——主动轮1的转速,r / min; nk ——从动轮 k 的转速,r / min。
,各对齿轮传动的传动比为:
i12 =
n1 = n2
z2 z1
i2'3 =
n2' = n3
z3 z2'
i34 =
n3 = n4
z4 z3
i4'5 =
n4' = n5
z5 z4'
i12
i2'3
i34
i4'5
n1 n2
n2' n3
n3 n4' n4 n5
z2 z3 z4 z5 z1 z2' z3 z4'
至少有一个齿轮的轴线(位置不固定)绕另一齿轮的轴线 转动的齿轮传动系统称为周转轮系。
二、周转轮系的组成:
中心轮(Sun gears)——周转轮系中轴线位置固定不动的齿轮
行星轮(Planet gears)——周转轮系中轴线不固定的齿轮
系杆H(行星架)(Planet carrier)——支撑行星轮的构件
n1 i17
1440 2r / min 720
在这个轮系中,轮4同时和两个齿轮啮合,它既是前一级的从 动轮,又是后一级的主动轮。显然,齿数Z4在公式的分子分母上 个出现一次,故不影响传动比的大小。这种不影响传动比数值大 小,只改变转向作用的齿轮称为过论,或者中介轮。
复合轮系传动比

i35
3 5
Z5 Z3
78
18
13
3
(1)
2
5
i5
13
1 3
5 5
Z2Z3 Z1Z2
33 24
关条件: 3 3
1
4 2’
3 3’
4.联立求解:
由(1)式: 3
3
13 3 5
代入(2)式得:
1 5 13 3 5 5
143
28
i15
1 5
(2) 定轴轮系部分有
n3 z5 78 13
n5
z 3
18
3
周转轮系部分有 (3) 联立解方程
n1 nH z2z3 52 78 159 n3 nH z1z2 24 21 21
将 nH n5,n3 n3 代入,得
1500 n5 169 (13 3)n5 n5 21
1、2-2'、3、5(H)——周转轮系 3'、4、5 ——定轴轮系
2、分别写出各基本轮系的传动比
周转轮系
: i1H3
1 3
H H
z2 z1
z3 z2'
定轴轮系 :i3'5
3 5
z4 z3'
z5 z4
z5 z3'
3、两个轮系之间的关系
5 H
4、联立求解
i15
1 5
1
z2 z3 z1z2
1 6
33 0.01 H
300
例二、已知:图示轮系中Z1 24, Z2 33,
Z2 21, Z3 78, Z3 18, Z4 30, Z5 78。
求:i15 ?
5
参考解: 1.区分轮系:
复合轮系

K
3’ 4
3 2 1
J
A
B
作者:潘存云教授
5
周转轮系2: 连接条件:
i A13=(ω1 - ωA ) /(0 -ωA ) =- z3 / z1 iB3’5=(ω 3’-ω B )/(ω 5-ω B ) =- z5/ z3’ ω 5=ω A i1A i5B
z3 1 5 1 z3 z3'' 3 (1 ) (1 ) )(1 联立解得: i1B B z1 z5 z1 A B 5 =i1A ·i5B
§5-4 复合轮系及 其传动比
周转轮系
+
周转轮系
=
复合轮系
*由几个基本轮系构成的 轮系称为复合轮系。
定轴轮系 + 周转轮系 = 复合轮系
复合轮系的传动比计算步骤: 1,区分基本轮系。
关键是找出周转轮系!
2,分别计算各基本 轮系的传动比。
+
3,找出各基本轮系间 的联系,联立基本轮 系的传动比方程机的传动比。(自学)
H
2
3
5 4
2’ 3’ 1
例六:图示为龙门刨床工作台的变 速机构,J、K为电磁制动器,设已 知各轮的齿数,求J、K分别刹车时 的传动比i1B。 解 1)刹住J时 3-3’将两者连接 定轴部分:
K
3’ 4
3 2 1
J
A
B
作者:潘存云教授
5
1-2-3为定轴轮系 B-5-4-3’为周转轮系
总传动比为两个串联周转轮系的传动比的乘积。
i13=ω 1/ω 3 =-z3/ z1
周转部分: iB3’5=(ω 3’-ω B)/(0-ω B) =-z5/ z3’ 连接条件: ω 3=ω 3’ 联立解得: i1B
8轮系
2
H
2'
1 H z 2 z3 解:i 1 i1H 3 H z1 z2 '
H 13
1
3
99 101 9999 100 100 10000
i1H
9999 1 1 i 1 10000 10000
H 13
iH 1
1 i1H
10000
§8 轮系
解:此轮系可看作由轮1、 2、3和行星架H组成的行 星轮系及由轮4、2'、2、3 和行星架H组成的另一行 星轮系组合而成。
§8 轮系
(1)在1-2-3-H组成的行星轮系中,有: z3 57 63 H i1H 1 i13 1 ( ) 1 z1 6 6 (2)在4-2'-2-3-H组成的行星 轮系中,有:
§ 8-2 定轴轮系及其传动比
已知轮系中各对啮合齿轮的 齿数,求传动比 i15 的大小
2
4
4'
解:1 – 2 – 3 = 3 – 4= 4 – 5
,
,
1 z2 i12 2 z1
z3 2 i23 3 z2
过轮
1
3
3' 5
3 z4 i34 4 z3
1 2 3 4 1 3 z z 3 z 4 z5 i12 i23 i34 i45 (1) i15 z1 z2 z3 z4 5 2 3 4 5
§8 轮系
重点
定轴轮系、周转轮系、复合轮系传动比 的计算。
难点
周转轮系传动比计算中正负符号问题, 以及复合轮系传动比计算中的基本轮系划分 问题是本章的难点。
§8 轮系
单级齿轮传动存在的缺陷
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
H
例: 如图所示周转轮系。已知Z1=15, Z2=25, Z3=20, Z4=60,n1=200r/min, n4=50r/min,且 两太阳轮1、4转向相反。试求行星架转速 n H及行星轮转速n3。
解: 1.求n
H
i
H 14
n 1- n H n 4- n H
定轴轮系传动比: i n1 z 2 12 =-2 n2 z1 其中n4=0 ,n2= n2 `
i1H = n1 /nH = -10 负号说明行星架H与齿轮1转向相反。
轮系的功用
1.实现分路传动
轮系的功用
2.获得大的传动比 一对外啮合圆柱齿轮传动,其传动比一般可为i<=5-7。 但是行星轮系传动比可达i=10000,而且结构紧凑。 3.实现换向传动
Z2 Z4 Z1 Z3
n H = - 50/6 r/min 负号表示行星架与齿轮1转向相反。 2.求n3 :(n3 = n2) Z2 n 1- n H H
i12
n 2- n H
Z1 = n3
n 2 = - 133 r/min
负号表示轮3与齿轮1转向相反。
混合轮系传动比的计算
先将混合轮系分解成基本周转轮系和定轴轮系, 然后分别列出传动比计算式,最后联立求解。
轮系的功用
4.实现变速传动
轮系的功用
5.实现运动的合成与分解
作业布置
P298 13-10、13-13
例:如图所示轮系中,已知各轮 齿数Z1=20, Z2=40, Z2 ` =20 Z3=30, Z4=80。计算传动比i1H 。 周转轮系:轮2`,3,H 解: 分解轮系 定轴轮系:轮1,2 周转轮系传动比:
i
H 2/ 4
H n2 n2 nH z4 H =-4 n4 n4 nH z2
H 1k
+
注意:
1.公式只适用于平面周转轮系。正、负号可按画箭头的方法来 确定,也可根据外啮合次数还确定(-1)m。对于空间周转轮 系,当两太阳轮和行星架的轴线互相平行时,仍可用转化轮系 法来建立转速关系式,但正、负号应按画箭头的方法来确定。 2.公式中的“+”、“-”号表示输入和输出轮的转向相同或相反。 3.对于差动轮系,必须给定n 1 、 n k 、n H中任意两个(F=2, 两个原动件),运动就可以确定。对于简单周转轮系,有一太 阳轮固定(n k=0),在n 1 、n H只需要给定一个(F=1,需要一 个原动件),运动就可以确定。
周转轮系传动比的计算
周转轮系及转化轮系中各构件的转速 构件名称 原来的转速
转化轮系中的转速
太阳轮1
行星轮2 太阳轮3 行星架H
n1 n2
n1H=n1-nH n2H=n2-nH
n3
nH
n3H=n3-n H nHH=nH-nH=0
由于转化轮系为定轴轮系,故根据定轴 轮系传动比计算式可得轮1、3传动比为: 该结论可推广到周转轮系的转化轮系传动比计算的一般情况:
不能直接用定轴轮系传动 比的公式计算周转轮系的 传动比。可应用转化轮系 法,即根据相对运动原理, 假想对整个行星轮系加上 一个与行星架转速n H大 小相等而方向相反的公共 转速-n H,则行星架被固 定,而原构件之间的相对 运动关系保持不变。这样, 原来的行星轮系就变成了 假想的定轴轮系。这个经 过一定条件转化得到的假 想定轴轮系,称为原周转 轮系的转化轮系。
例:如图所示的周转轮系中,已知各 轮齿数为Z1=100, Z2=99, Z3=100, Z4=101 ,行星架H为原动件,试求传 动比iH1=? 解: iH1=n H / n 1 i14=(n 1 - n H )/ (n 4 - n H ) =1- n 1 / n H =-Z2Z4/Z1Z3 =1- i1H i1H =-(1-99x101/100x100)=-1/10000 iH1=n H / n 1 =1/i1H =-10000 传动比为负,表示行星架H与齿轮1的转向相反。
第31讲
周转轮系\复合轮系
周转轮系传动比的计算
具有一个自由度的周转轮 系称为简单周转轮系,如 下图所示;将具有两个自 由度的周转轮系称为差动 轮系,如下图所示。
F=3x(N-1)-2PL-PH F1=3x3-2x3-2=1 F2=3x4-2x4-2=2
自由度表示原动件的数目。
周转轮系传动比的计算
n1 nH m 轮 1至 轮 k 之 间 各对 齿 轮 的 从动轮 齿 数连 乘积 i (1) nk nH 轮 1至 轮 k 之 间 各对 齿 轮 的 主 动轮 齿 数连 乘积
H 1k
+
周转轮系传动比的计算
n1 nH m 轮 1至 轮 k 之 间 各对 齿 轮 的 从动轮 齿 数连 乘积 i (1) nk nH 轮 1至 轮 k 之 间 各对 齿 轮 的 主 动轮 齿 数连 乘积