高德 roadnet 参数
高德 roadnet 参数
高德 roadnet 参数高德RoadNet参数详解一、概述高德RoadNet是一种用于规划路径的算法,它基于道路网络数据,通过考虑多种因素来确定最佳路径。
本文将介绍高德RoadNet算法中的一些重要参数及其功能。
二、地图数据高德RoadNet算法的核心是道路网络数据,该数据包括道路的形状、长度、限速信息等。
这些数据是通过高德地图的数据采集车辆和用户行为数据进行实时更新的,确保了数据的准确性和实时性。
三、起点和终点在使用高德RoadNet算法进行路径规划时,需要指定起点和终点。
起点和终点可以是具体的经纬度坐标,也可以是地名或地址。
算法将根据起点和终点的位置信息来确定最佳路径。
四、交通状况高德RoadNet算法考虑了实时的交通状况信息。
在进行路径规划时,算法会根据实时交通数据来判断道路的拥堵程度,从而选择较少拥堵的道路作为路径的一部分。
这使得规划出的路径更加准确和实用。
五、道路类型高德RoadNet算法支持对不同道路类型进行区分。
道路类型包括高速公路、城市道路、乡村道路等。
算法会根据道路类型的不同,对路径进行优化,以提供更加合理的路径。
六、避让区域高德RoadNet算法支持指定避让区域。
避让区域可以是一些特定的区域,如施工区、拥堵区等。
算法会避免将避让区域包含在路径中,从而选择绕过这些区域的最佳路径。
七、路径约束高德RoadNet算法支持指定路径约束。
路径约束可以是一些特定的要求,如最短路径、最快路径等。
算法会根据路径约束的要求,选择满足要求的最佳路径。
八、导航模式高德RoadNet算法支持不同的导航模式。
导航模式可以是驾车模式、步行模式、骑行模式等。
算法会根据不同的导航模式,优化路径规划的结果,以提供更加适合不同出行方式的路径。
九、结果输出高德RoadNet算法的结果输出包括路径信息和导航指令。
路径信息包括起点、终点、途经点以及路径的距离和时间等。
导航指令则指导用户在行驶过程中的转向和行驶方式。
pure_pursuit 参数
pure_pursuit 参数PurePursuit算法是一种基于路径跟踪的控制算法,可用于实现无人车自主导航。
该算法的核心是计算车辆当前位置到路径上最近点的距离,并根据距离计算出车辆需要执行的转向指令。
在实际应用中,需要设置一些参数来调整算法的性能。
本文将介绍Pure Pursuit算法的几个重要参数及其影响。
1. 前瞻距离(Lookahead Distance)前瞻距离是指车辆在路径上所看到的未来路径的长度。
它可以影响车辆的控制精度和响应速度。
如果前瞻距离太小,车辆会频繁地转弯,导致控制不稳定。
而如果前瞻距离太大,车辆可能会过度调整方向,导致路径偏离。
因此,需要根据具体应用场景进行合理设置。
2. 路径偏移(Path Offset)路径偏移是指车辆与路径之间的距离,它可以控制车辆在路径上的位置。
如果路径偏移为0,车辆将始终沿着路径中心行驶。
而如果路径偏移为正数,车辆将偏向路径左侧行驶,反之则偏向右侧行驶。
需要根据实际道路情况进行设置。
3. 最大转向角(Max Steering Angle)最大转向角是指车辆最大可以转向的角度。
它可以控制车辆的转向幅度,从而影响车辆的控制精度和响应速度。
如果最大转向角太小,车辆无法有效转向,导致控制不灵活。
而如果最大转向角太大,车辆可能会过度调整方向,导致路径偏离。
4. 车辆速度(Vehicle Speed)车辆速度是指车辆实际行驶的速度。
它可以影响车辆的控制精度和响应速度。
如果车辆速度太快,车辆可能无法跟随路径进行有效控制。
而如果车辆速度太慢,车辆可能无法及时响应路径变化。
综上所述,Pure Pursuit算法的参数设置需要根据具体应用场景进行合理调整,以实现车辆的稳定控制和优化性能。
Opendrive地图数据解析
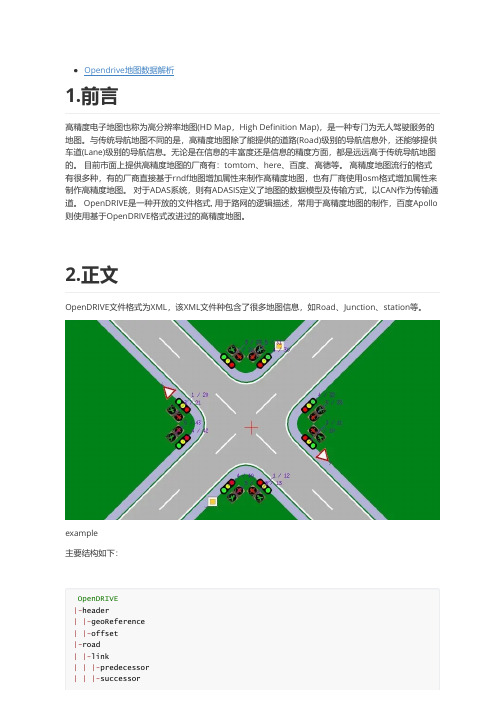
example主要结构如下:|||-neighbor||-type|||-speed||-planView|||-geometry||||-line ||||-spiral||||-arc||||-poly3||||-paramPoly3||-elevationProfile|||-elevation||-lateralProfile|||-superelevation|||-crossfall|||-shape||-lanes|||-laneOffset|||-laneSection||||-left|||||-lane||||||-link|||||||-predecessor|||||||-successor||||||-width||||||-border||||||-roadMark|||||||-sway|||||||-type||||||||-line|||||||-explicit||||||||-line||||||-material||||||-visibility||||||-speed||||||-access||||||-height||||||-rule||||-center|||||-lane||||||-link|||||||-predecessor|||||||-successor|||||||-predecessor|||||||-successor||||||-roadMark|||||||-sway|||||||-type||||||||-line|||||||-explicit||||||||-line||||-right|||||-lane||||||-link|||||||-predecessor|||||||-successor||||||-width||||||-border||||||-roadMark|||||||-sway|||||||-type||||||||-line|||||||-explicit||||||||-line||||||-material||||||-visibility||||||-speed||||||-access||||||-height||||||-rule||-objects|||-object||||-repeat||||-outlines|||||-outline||||||-cornerRoad||||||-cornerLocal||||-material||||-validity||||-parkingSpace||||-markings|||||-marking||||||-cornerReference||||-borders|||||-border||||||-cornerReference|||-objectReference||||-validity|||-tunnel ||||-validity|||-bridge ||||-validity||-signals|||-signal||||-validity||||-dependency||||-reference||||-positionRoad||||-positionInertial|||-signalReference||||-validity||-surface|||-CRG||-railroad|||-switch||||-mainTrack||||-sideTrack||||-partner|-controller||-control|-junction||-connection|||-predecessor|||-successor|||-laneLink||-priority||-controller||-surface|||-CRG|-junctionGroupcsB.Road LayoutOpenDRIVE中路网结构中的一个road,该road有三部分组成,蓝色的reference line,车道lane,车道lane的其他feature(限速等)。
两点间距 php 高德坐标系
1. 两点间距离在地理信息系统中,计算两点之间的距离是一项基本而重要的任务。
无论是在导航系统中确定最短路径,还是在地图应用中展示两个地点之间的距离,都需要准确地计算出两点之间的距离。
对于Web开发人员来说,将地理位置信息整合到他们的应用中也是一项常见的任务。
2. 高德坐标系高德地图是我国领先的数字地图内容、导航和位置服务解决方案提供商。
在高德地图中,地理位置信息使用的是高德坐标系,它是一种将地球表面的经纬度坐标映射到平面坐标系上的方法。
对于开发人员来说,使用高德坐标系进行地理位置信息的处理是必不可少的。
3. PHP中的地理位置信息处理PHP是一种广泛应用于Web开发的编程语言,它提供了丰富的地理位置信息处理功能。
在PHP中,我们可以利用现有的API或者库来处理地理位置信息,包括计算两点之间的距离、转换坐标系等操作。
4. 计算两点之间的距离对于Web开发人员来说,计算两点之间的距离是一项常见的需求。
在PHP中,我们可以利用现有的函数或者类库来实现这一功能。
以高德坐标系为例,我们可以利用高德地图API中提供的函数来计算两个地点之间的距离。
5. 代码示例以下是一个使用PHP和高德地图API来计算两点之间距离的简单示例:```php<?phpfunction getDistance($lat1, $lng1, $lat2, $lng2) {$url ="xxx{$lng1},{$lat1}destination={$lng2},{$lat2}type=1output=json key=your_key";$result = file_get_contents($url);$data = json_decode($result, true);if($data['status'] == 1) {return $data['results'][0]['distance'];} else {return false;}}$distance = getDistance(39.xxx,116.xxx,31.xxx,121.xxx);echo "两点之间的距离为:".$distance;>```在这个示例中,我们定义了一个`getDistance`函数,该函数接受四个参数分别为两个地点的经度和纬度。
地图与地图标注API用户手册
OverlayBundle 已封装到了 MapView 中,请使用 MapView 对 OverlayBundle 进行操作。 每个 Overlay 可以管理多个 OverlayItem,并且有自己的 事件
3 / 29
高德软件
处理模块和绘制方法,用户可以覆盖重写。 OverlayItem 是纯虚类,需要有此派生出点,线面等。 每个层里用户可以通过函数添加多个 OverlayItem。 点位于地图中心时展开 Label。 当点位于地图中心时,按 OK 按钮将点设置为所在层的焦点,
4 / 29
高德软件
1.3 定义
1.3.1 EAnchorRectLocationType 锚点定义
锚点只一个点的中心点在具体图表的什么位置。以下为具体定义,默认点 Item 锚点为 EAnchorTypeDownMid,即 7 enum EAnchorRectLocationType { /*
自动驾驶 场景数据 标准格式 转化

自动驾驶场景数据标准格式转化以下为一份自动驾驶场景数据的标准格式转化示例,为保护隐私,本示例中不包含真实名字和引用:{"timestamp": "2022-01-01 12:00:00", // 数据生成时间戳"location": {"latitude": 37.7749, // 场景发生地点纬度"longitude": -122.4194 // 场景发生地点经度},"weather": {"temperature": 25, // 当前温度(摄氏度)"humidity": 60, // 当前湿度(百分比)"visibility": 500 // 当前能见度(米)},"road_conditions": {"traffic_signs": [{"type": "speed_limit", // 交通标志类型"location": {"latitude": 37.7751, // 标志位置纬度"longitude": -122.4183 // 标志位置经度},"speed_limit": 50 // 限速标志速度限制(km/h)},{"type": "stop","location": {"latitude": 37.7747,"longitude": -122.4201}}],"intersection": {"type": "signalized", // 路口类型"location": {"latitude": 37.7753, // 路口位置纬度"longitude": -122.4200 // 路口位置经度},"traffic_light": "red" // 交通灯颜色状态}},"vehicle_data": {"speed": 60, // 车辆当前速度(km/h)"acceleration": 0.5, // 车辆当前加速度(m/s^2)"fuel_level": 75, // 车辆当前燃油水平(百分比) "engine_temperature": 90 // 车辆当前发动机温度(摄氏度) },"obstacles": [{"type": "pedestrian", // 障碍物类型"location": {"latitude": 37.7752, // 障碍物位置纬度"longitude": -122.4187 // 障碍物位置经度},"velocity": 1.5 // 障碍物当前速度(m/s)},{"type": "vehicle","location": {"latitude": 37.7748,"longitude": -122.4197},"velocity": 10}]}以上示例为一份自动驾驶场景数据的标准格式转化,包含了时间戳、位置、天气、道路状况、车辆数据和障碍物等关键信息。
高德地图API使用说明

使用AutoNavi MAP API 开发地图应用•为什么要使用AutoNavi MAP API•AutoNavi MAP API 概述•AutoNavi Android MAP API 与Google Android Map API 比较•如何使用AutoNavi MAP API如何实现坐标偏转如何创建MapView如何创建ItemizedOverlay如何创建PoiSearch如何创建Geocoder如何创建MyLocation•FAQ•技术支持(QQ群:122795260, 邮箱:mapservice@)为什么要使用AutoNavi MAP API因为商业上的原因,联想不能在中国市场发布的手机上预装Google相关的手机服务,包括Google地图API。
为了解决这一问题,我们和高德公司(AutoNavi)合作,在手机上预置了AutoNavi提供的多种基于位置的服务。
高德公司作为中国领先的导航电子地图内容和位置服务解决方案提供商,旗下的互联网MAP API()同样在业界具有良好的口碑。
可为客户提供跨平台、跨媒体的位置服务解决方案。
我们同时鼓励中国的开发者们,使用AutoNavi MAP API开发基于位置和地图应用程序,并且发布在中国市场中的联想手机上。
AutoNavi MAP API 概述AutoNavi MAP API是高德软件公司提供的调用地图的接口方法。
用户的应用程序可以通过AutoNavi MAP API提供的接口方法操作地图数据,实现位置相关或地图相关应用。
例如,通过调用AutoNavi MAP API,将地图数据整合到自己的应用中,可以将商户的地理位置信息在地图上进行标注,以很直观的形式展现给使用者。
AutoNavi MAP API还将添加自驾,公交及步行的线路规划API。
同时,还将加入对矢量地图的支持,大幅提高地图下载的速度。
在不久的将来,还会加入3D街区图和其他的个性化地理数据支持。
transcad中路网常用参数设置
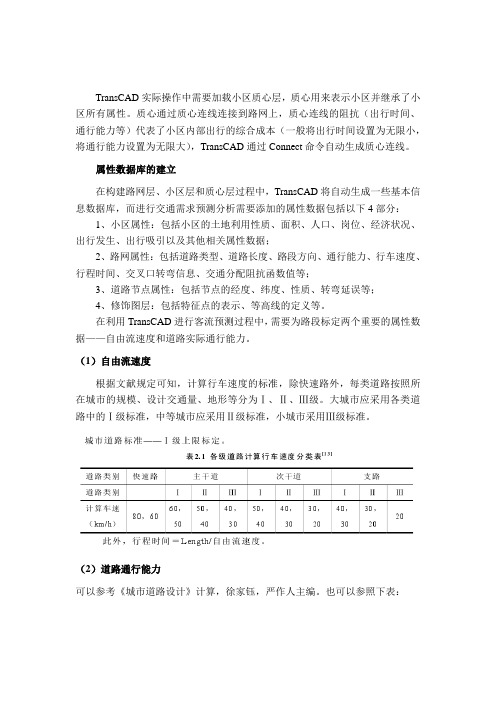
TransCAD实际操作中需要加载小区质心层,质心用来表示小区并继承了小区所有属性。
质心通过质心连线连接到路网上,质心连线的阻抗(出行时间、通行能力等)代表了小区内部出行的综合成本(一般将出行时间设置为无限小,将通行能力设置为无限大),TransCAD通过Connect命令自动生成质心连线。
属性数据库的建立在构建路网层、小区层和质心层过程中,TransCAD将自动生成一些基本信息数据库,而进行交通需求预测分析需要添加的属性数据包括以下4部分:1、小区属性:包括小区的土地利用性质、面积、人口、岗位、经济状况、出行发生、出行吸引以及其他相关属性数据;2、路网属性:包括道路类型、道路长度、路段方向、通行能力、行车速度、行程时间、交叉口转弯信息、交通分配阻抗函数值等;3、道路节点属性:包括节点的经度、纬度、性质、转弯延误等;4、修饰图层:包括特征点的表示、等高线的定义等。
在利用TransCAD进行客流预测过程中,需要为路段标定两个重要的属性数据——自由流速度和道路实际通行能力。
(1)自由流速度根据文献规定可知,计算行车速度的标准,除快速路外,每类道路按照所在城市的规模、设计交通量、地形等分为Ⅰ、Ⅱ、Ⅲ级。
大城市应采用各类道路中的Ⅰ级标准,中等城市应采用Ⅱ级标准,小城市采用Ⅲ级标准。
(2)道路通行能力可以参考《城市道路设计》计算,徐家钰,严作人主编。
也可以参照下表:如果项目考虑道路一天的交通流量,则路段单向单车道通行能力需要在上表基础上除以所在城市的机动车高峰小时流量比***%,然后计算得出高峰小时流量。
TransCAD公交数据库的建立在TransCAD系统中,具有地理特征的信息是分层管理和存储的。
每一图层放有特征相同或相近的地理对象,并且有一个数据库表与之对应,图层中每一对象与数据库表中的一条记录相对应,这种关系是一一对应且是唯一的。
TransCAD利用层的概念来管理、贮存和分析信息,然后把不同的图层相互叠加起来,来实现对研究区域信息的可视化。
高德地图实例代码及图片处理

高德地图的的一些功能和代码展现一、地图的放大和缩小:AMap aMap = MapView.getMap();aMap.moveCamera(CameraUpdateFactory.zoomIn());//放大aMap.moveCamera(CameraUpdateFactory.zoomOut());//缩小二、地图的移动aMap.moveCamera(CameraUpdateFactory.zoomOut());//缩小aMap.moveCamera(CameraUpdateFactory.scrollBy(100, 0))//右移aMap.moveCamera(CameraUpdateFactory.scrollBy(0, -100))//上移aMap.moveCamera(CameraUpdateFactory.scrollBy(-100, 0))//左移aMap.moveCamera(CameraUpdateFactory.scrollBy(0, 100))//下移三、地图的模式aMap.setMapType(AMap.MAP_TYPE_NORMAL);// 矢量地图模式aMap.setMapType(AMap.MAP_TYPE_SATELLITE);// 卫星地图模式aMap.setMapType(AMap.MAP_TYPE_NIGHT);//夜景地图模式四、显示实施交通情况aMap.setTrafficEnabled(true);五、在地图上添加覆盖物1、绘制一个上海、北京、西安三点的虚线三角形polyline = aMap.addPolyline((new PolylineOptions()).add(Constants.SHANGHAI, Constants.BEIJING, Constants.CHENGDU) .width(10).setDottedLine(true).geodesic(true).color(Color.argb(255, 1, 1, 1)));2、绘制一个乌鲁木齐到哈尔滨的大地曲线aMap.addPolyline((new PolylineOptions()).add(new LatLng(43.828, 87.621), new LatLng(45.808, 126.55)).geodesic(true).color(Color.RED));3、在地图上添加一个标记aMap.addMarker(new MarkerOptions().position(latlng).icon(BitmapDescriptorFactory.defaultMarker(BitmapDescriptorFactory.HUE_AZURE)).perspective(true).draggable(true));4、以北京为中心在地图上绘制一个圆形aMap.addCircle(new CircleOptions().center(Constants.BEIJING).radius(4000).strokeColor(Color.argb(50, 1, 1, 1)).fillColor(Color.argb(50, 1, 1, 1)).strokeWidth(25));六、地图的定位aMap.setMyLocationType(AMap.LOCATION_TYPE_LOCATE);定位模式aMap.setMyLocationType(AMap.LOCATION_TYPE_MAP_FOLLOW);跟随模式aMap.setMyLocationType(AMap.LOCATION_TYPE_MAP_ROTATE);根据地图面向方向旋转LocationManagerProxy mAMapLocationManager = LocationManagerProxy.getInstance(this);mAMapLocationManager.requestLocationUpdates(LocationProviderProxy.AMapNetwork, 2000, 10, this);七、路径规划AMapNavi mAMapNavi = AMapNavi.getInstance(this);两点间驾车路线mAMapNavi.calculateDriveRoute(mStartPoints,mEndPoints, null, AMapNavi.DrivingDefault);两点间步行路线mAMapNavi.calculateWalkRoute(mNaviStart, mNaviEnd);webService的功能介绍1、合法用户把图片进行切片上传public static String f_uploadImage(String mStr, String userName,String password) throws Exception {String mResult = "";String fileType = "";int startPosL = 0;RandomAccessFile oSavedFile = null;JSONObject jsonObject = JSONObject.fromObject(mStr);String imageJsonStr = jsonObject.getString("Image");Base64 base64 = new Base64();byte[] imageBytes = base64.decode(imageJsonStr); // Usual.f_fromBase64String(imageJsonStr);startPosL = (Integer) jsonObject.get("start"); // 接收客户端的开始位置(文件读取到的字节大小)fileType = (String) jsonObject.getString("filetype");String fileName = (String) jsonObject.getString("FileName"); String orclPath = (String) jsonObject.getString("FilePath"); String toDir = SaveImagePath + orclPath;File destDir = new File(toDir);if (!destDir.exists()) {destDir.mkdirs();}oSavedFile = new RandomAccessFile(toDir + fileName, "rw");// 设置标志位,标志文件存储的位置oSavedFile.seek(startPosL);oSavedFile.write(imageBytes);oSavedFile.close();mResult = "000";return mResult;}2、图片进行比例缩小private static void createImage(File fi, File fo, int nw)throws IOException {AffineTransform transform = new AffineTransform(); BufferedImage bis = ImageIO.read(fi); // 读取图片int w = bis.getWidth();int h = bis.getHeight();int nh = (nw * h) / w;double sx = (double) nw / w;double sy = (double) nh / h;transform.setToScale(sx, sy);AffineTransformOp ato = new AffineTransformOp(transform, null); BufferedImage bid = new BufferedImage(nw, nh, BufferedImage.TYPE_3BYTE_BGR);ato.filter(bis, bid);ImageIO.write(bid, "jpeg", fo);}。
高德 roadnet 参数

高德 roadnet 参数高德RoadNet参数详解一、RoadNet简介高德RoadNet是高德地图中的一个重要功能,用于规划路径和导航。
RoadNet参数是指在使用高德地图进行路径规划时,可以设置的一些参数,以便满足用户的个性化需求,提供更加准确、高效的路径规划和导航服务。
二、常用的RoadNet参数1. 路径规划方式:根据用户需求,可以选择不同的路径规划方式,如最短路径、最经济路径、最快捷路径等。
不同的路径规划方式适用于不同的场景,用户可以根据实际情况选择合适的方式。
2. 避让区域:在规划路径时,可以设置避让区域,以避免经过某些区域。
例如,用户可以设置避让某个特定的区域,如工地、拥堵路段等,以便规划出更加顺畅的路径。
3. 躲避拥堵:高德RoadNet可以根据实时交通情况,自动规避拥堵路段,为用户提供更加畅通的路径。
用户可以设置是否躲避拥堵,以便根据具体需求进行路径规划。
4. 避免收费道路:在路径规划时,可以设置避免收费道路,以便规划出不经过收费路段的路径。
这对于一些想要节省费用或避免收费的用户来说,是非常实用的功能。
5. 避免高速:在路径规划时,可以设置避免高速公路,以便规划出不经过高速公路的路径。
这对于一些不喜欢高速行驶或者驾驶经验较少的用户来说,是非常实用的功能。
6. 限制车辆类型:高德RoadNet还支持根据不同车辆类型进行路径规划。
用户可以设置车辆类型,如小汽车、货车、摩托车等,以便规划出适合特定车辆类型的路径。
7. 路径偏好:在路径规划时,可以设置路径偏好,如偏好高速、偏好非高速、偏好高速与非高速混合等。
这样可以更加精确地满足用户的个性化需求。
8. 规划起点和终点:用户可以设置路径规划的起点和终点,以便规划出两点之间的最佳路径。
起点和终点可以通过输入地址、坐标或者地图选点等方式进行设置。
三、使用RoadNet参数的注意事项1. 参数设置合理性:在设置RoadNet参数时,需要注意参数的合理性。
基于python的高德地图实时路况信息爬取分析
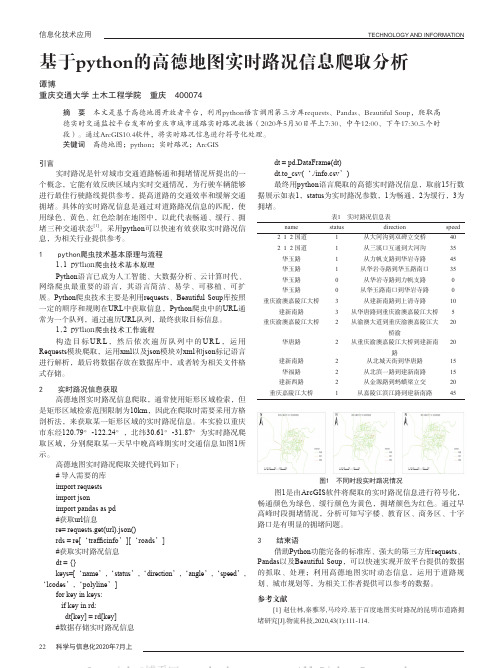
网络爬虫最重要的语言,其语言简洁、易学、可移植、可扩 展。Python爬虫技术主要是利用requests、Beautiful Soup库按照 一定的顺序和规则在URL中获取信息,Python爬虫中的URL通 常为一个队列,通过遍历URL队列,最终获取目标信息。
是矩形区域检索范围限制为10km,因此在爬取时需要采用方格 剖析法,来获取某一矩形区域的实时路况信息。本实验以重庆 市东经120.79°-122.24°,北纬30.61°-31.87°为实时路况爬 取区域,分别爬取某一天早中晚高峰期实时交通信息如图1所 示。
高德地图实时路况爬取关键代码如下: # 导入需要的库 import requests import json import pandas as pd #获取url信息 re= requests.get(url).json() rds = re[‘trafficinfo’][‘roads’] #获取实时路况信息 dt = {} keys=[‘name’,‘status’,‘direction’,‘angle’,‘speed’, ‘lcodes’,‘polyline’] for key in keys:
Pandas以及Beautiful Soup,可以快速实现开放平台提供的数据 的抓取、处理;利用高德地图实时动态信息,运用于道路规 划、城市规划等,为相关工作者提供可以参考的数据。
参考文[J].物流科技,2020,43(1):111-114.
引言 实时路况是针对城市交通道路畅通和拥堵情况所提出的一
个概念,它能有效反映区域内实时交通情况,为行驶车辆能够 进行最佳行驶路线提供参考,提高道路的交通效率和缓解交通 拥堵。具体的实时路况信息是通过对道路路况信息的匹配,使 用绿色、黄色、红色绘制在地图中,以此代表畅通、缓行、拥 堵三种交通状态[1]。采用python可以快速有效获取实时路况信 息,为相关行业提供参考。
高德坐标的7个坐标系参数
高德坐标的7个坐标系参数
高德坐标系的七个坐标系参数分别是:长半轴(a)、短半轴(b)、扁率(α)、偏心率(ε)、0经线的投影纵坐标(y0)、投影横坐标(x0)和中央经线(λ)。
这些参数用于描述地球椭球体的几何特性,并用于计算地球上任意位置的经纬度坐标。
其中,长半轴(a)表示地球赤道半径,短半轴(b)表示地球极半径,扁率(α)表示地球椭球体的扁平程度,偏心率(ε)表示地球椭球体偏离球形的程度。
而0经线的投影纵坐标(y0)和投影横坐标(x0)用于计算0经线的投影坐标,中央经线(λ)表示高德坐标系的中央经线,用于确定坐标系的偏移量。
cartographer 自适应体素滤波参数
Cartographer中的自适应体素滤波参数包括max_length、min_num_points和max_range。
具体来说:
1. max_length:这是网格滤波的最大大小,决定了体素网格的最大边长。
增加这个值会导致体素的大小增大,从而减少需要处理的点数,但可能会降低地图的细节程度。
2. min_num_points:这是每个体素中所需的最小点云数据量。
如果一个体素内的点数少于这个值,那么这些点将会被滤除。
减小这个值会减少需要处理的点数,但同样可能会影响地图的精度。
3. max_range:这是最远点云距离,即在地图构建过程中考虑的最远距离。
增大这个值会使更多的远距离点云被包含进来,而减小则会剔除这些点。
高精度导航地图道路线形参数估计方法
高精度导航地图道路线形参数估计方法摘要:未来的无人驾驶车辆可以安全地行驶,并需要融入高精度的电子地图,特别是在车道导航的高精度数据库中。
道路曲率在规划和实施道路对象数据中的无人路径方面起着关键作用,因为没有一个道路设计方案可以完全按照设计方案实施。
这会导致道路真实曲率的变化,从而使存储道路要素参数以实现高精度导航变得困难。
需要更高精度时,对高精度地图数据的要求更高。
无人驾驶车辆行驶时,需要确定前方道路弯曲的趋势和方向,以便提前调整和改变车道和速度。
因此,您必须在地图资料库中输入精确的街道曲率,以确保车辆安全行驶。
因此,广泛使用的导航电子地图无论是在位置检测精度方面还是在地图对象细节方面,都无法满足未来无人驾驶发展的要求。
关键词:无人驾驶汽车;高精度导航;电子地图;道路曲率;发展;前言随着互联网时代的迅速变化,越来越多的新的地方性产业正在发展,例如互联网+、智能交通工具、无人驾驶系统等。
但是,这些行业的发展需要准确的位置信息来支持,以往导航地图5m的准确性还不够。
因此,提出了一种高精度道路导航图的概念。
准确的道路导航地图具有更丰富、更详细的道路信息,这些信息更准确地反映了道路的真实外观。
它具有比传统地图更多的图层、更详细的图层内容和新的贴图结构拆分。
由于高速公路导航中包含大量高精度数据,传统的集中式计算模型无法满足您的计算需求。
道路导航的高精度格式组合目前处于高速发展阶段,但在发展过程中仍有一些问题需要解决。
一、高精度地图概述1.地图精度典型导航图的精度约为5m。
它只是描述了道路的位置和形状,没有反映道路的细节,无法准确确定车辆的位置。
高精度道路导航图的绝对精度优于1m,相对精度为10 ~ 20厘米。
它包含许多信息,例如例如,车道、车道范围、车道中心线、车道范围等。
2.地图内容结构高精度道路导航地图更真实地反映了道路的实际样式,从而包含更多图层和道路数据,并更详细地表示图层。
高精度的道路导航地图不仅具有更精确的坐标,而且具有更精确的道路造型。
高德测速原理

高德测速原理1. GPS定位技术高德地图测速技术的核心是GPS定位技术。
GPS(全球定位系统)是由美国国防部开发的一种卫星导航系统,可以为地球上的任何位置提供精确的时间和地理位置信息。
当您使用高德地图进行导航时,您的设备会接收到来自GPS卫星的信号,从而确定您的当前位置和行驶速度。
1.1 GPS信号接收与处理GPS信号是通过卫星发射的无线电波,信号中包含了发送时间、卫星位置等信息。
当您的设备接收到这些信号后,会通过内置的GPS 芯片进行处理,计算出您的位置和速度。
在这个过程中,设备的硬件性能和信号接收环境都会对测速结果的准确性产生影响。
1.2 GPS误差来源虽然GPS定位技术在很大程度上已经非常成熟,但仍然存在一些误差来源,主要包括:信号传播延迟:由于无线电波的传播速度有限,GPS信号从卫星发射到接收需要一定的时间,这会导致定位误差。
多径效应:在城市环境中,建筑物和其他障碍物会对GPS信号产生反射和散射,导致信号失真,进而影响测速准确性。
设备误差:不同设备和GPS芯片之间可能存在性能差异,从而导致测速结果不一致。
2. 网络数据辅助为了提高测速的准确性,高德地图还结合了网络数据进行辅助。
在部分城市,高德地图会与交通管理部门合作,获取实时的交通流量、限速信息等数据。
这些数据可以帮助高德地图更准确地判断您的行驶速度是否符合道路限速要求。
2.1 交通数据来源高德地图获取交通数据的主要途径包括:政府部门:通过与交通管理部门的合作,获取道路限速、交通流量等实时数据。
公共交通数据:整合公交、地铁等公共交通工具的数据,为用户提供更全面的出行信息。
用户反馈:鼓励用户分享自己在路上的见闻,帮助高德地图不断完善和优化导航服务。
2.2 数据分析与处理在网络数据辅助方面,高德地图采用了多种算法和技术,如机器学习、大数据分析等,对收集到的数据进行分析和处理,提取出有价值的信息,并应用到测速功能中。
3. 行驶轨迹分析除了GPS定位技术和服务器端的网络数据辅助,高德地图还利用了行驶轨迹分析技术来进一步提高测速准确性。
Lanelet2标注指南

自动驾驶里面,常见的地图格式有百度的Apollo OpenDrive,Autoware的VectorMap(已淘汰),德国FZI研究中心开源的Lanelet2(也是autoware目前的方案)。
至于NDS格式,奈何本人不是nds协会的会员,实在是拿不到资料,所以不在本文讨论范围内。
本文将介绍如何从头开始绘制lanelet2地图,并用于实际车辆的导航。
地理坐标系
Lanelet2介绍
Lanelet2是德国FZI研究院开发的一个高精度地图格式/库。
建议先阅读一遍他仓库里面的文档:Lanelet2文档、Lanelet2投影坐标系
Autoware中的Lanelet2有些许改动,见autoware的lanelet2定义
在JOSM中标注
Lanelet2标注说明
JOSM标注效果
在Maptoolbox中标注MapToolbox
Maptoolbox标注效果
两者的转换
Maptoolbox标注出来的只有当地坐标系,没有WGS84坐标
Maptoolbox标注出来的点id为从0开始
不能打开空线条
JOSM打开osm文件需要wgs84坐标
JOSM打开osm文件中点的id需要小于0或大于0
josm标注出来可能存在空的线条
根据以上可以自己写一个脚本转换,我稍微改了改Maptoolbox代码(MapToolbox修改后),修改如下:
现保存的ID大于0
要求pcd中坐标为正确的mgrs坐标
保存文件前需要MGRS code,以生成wgs84坐标
重新编译了GeographicWarpper.dll, 添加了UTMUPS_Reverse 和 MGRS_Reverse 函数.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高德 roadnet 参数
高德RoadNet参数详解
一、什么是高德RoadNet参数?
高德RoadNet参数是指在高德地图API中用于描述道路网络的一组参数。
这些参数包括道路的形状、长度、宽度、速度等信息,通过这些参数可以帮助我们更好地理解道路网络的特征,并在导航、路径规划等应用中发挥重要作用。
二、RoadNet参数的分类
1. 基本参数类:
- 道路编号:每条道路都有一个唯一的编号,用于标识该道路。
- 道路名称:道路的名称,描述了该道路的地理位置或特征。
- 道路等级:道路的等级反映了道路的重要性和通行能力,如高速公路、城市主干道等。
- 道路方向:道路的行驶方向,包括双向、单向等。
- 道路长度:道路的长度,以米为单位。
- 道路宽度:道路的宽度,以米为单位。
- 道路速度:道路的限速,以公里/小时为单位。
2. 路口参数类:
- 路口编号:每个路口都有一个唯一的编号,用于标识该路口。
- 路口名称:路口的名称,描述了该路口的地理位置或特征。
- 路口坐标:路口的地理坐标,用经纬度表示。
- 路口连接:连接到该路口的道路信息,包括进口道路和出口道路。
3. 路段参数类:
- 路段编号:每个路段都有一个唯一的编号,用于标识该路段。
- 路段形状:路段的形状信息,通常使用一组坐标点表示。
- 路段长度:路段的长度,以米为单位。
- 路段宽度:路段的宽度,以米为单位。
- 路段速度:路段的限速,以公里/小时为单位。
- 路段交通状态:路段的交通拥堵情况,如畅通、缓行、拥堵等。
三、RoadNet参数的应用
1. 导航系统:通过分析道路网络的参数,导航系统可以为用户提供最佳的行驶路线和导航指引,帮助用户准确、高效地到达目的地。
2. 路径规划:通过分析道路网络的参数,路径规划系统可以根据用户的出发地和目的地,计算出最短路径或最优路径,帮助用户规划行程。
3. 交通管理:通过实时监测道路网络的参数,交通管理部门可以了解道路的交通情况,及时采取措施疏导交通,提高道路通行能力。
4. 地理信息分析:通过分析道路网络的参数,地理信息系统可以研究道路网络的结构特征、交通流量分布等问题,为城市规划、交通
规划等提供科学依据。
四、RoadNet参数的更新和维护
高德地图会不断更新道路网络的参数,以反映实际的道路情况。
更新的方式包括人工调查、高精度地图数据采集、用户反馈等。
同时,高德地图也会对道路网络进行维护,及时修正道路参数中的错误或不准确的信息。
总结:
高德RoadNet参数是描述道路网络的一组重要参数,包括道路的形状、长度、宽度、速度等信息。
这些参数在导航、路径规划、交通管理和地理信息分析等领域发挥着重要作用。
通过分析道路网络的参数,我们可以更好地了解道路的特征,规划最佳路径,提高交通效率,为城市规划和交通规划提供科学依据。
高德地图会不断更新和维护道路网络的参数,以保证道路信息的准确性和实用性。