【RU2019103906A】实验室磁场标准【专利】
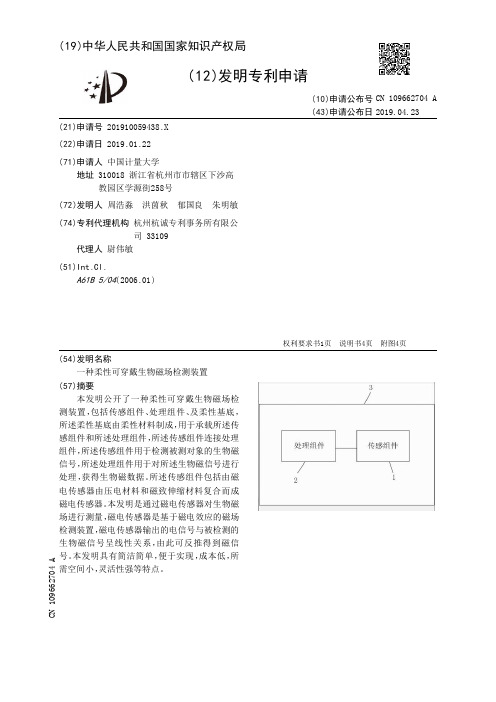
一种柔性可穿戴生物磁场检测装置_CN109662704A
3 .根据权利要求2所述的一种柔性可穿戴生物磁场检测装置,其特征在于,还包括通讯 组件,所述通讯组件连接处理组件,用于将生物磁数据传输至终端设备,通讯组件包括蓝牙 通讯模块、WIFI模块或者蜂窝网络模块中的至少一种。
( 19 )中华人民 共和国国家知识产权局
( 12 )发明专利申请
(21)申请号 201910059438 .X
(22)申请日 2019 .01 .22
(71)申请人 中国计量大学 地址 310018 浙江省杭州市市辖区下沙高 教园区学源街258号
(72)发明人 周浩淼 洪茵秋 郁国良 朱明敏
(74)专利代理机构 杭州杭诚专利事务所有限公 司 33109
权利要求书1页 说明书4页 附图4页
CN 109662704 A
CN 109662704 A
权 利 要 求 书
1/1 页
1 .一种柔性可穿戴生物磁场检测装置,其特征在于,包括传感组件、处理组件、及柔性 基底,所述柔性基底由柔性材料制成,用于承载所述传感组件和所述处理组件,所述传感组 件连接处理组件 ,所述传感组件 用于检 测被 测对象的 生物磁信号 ,所述处理组件 用于对所 述生物磁信号进行处理,获得生物磁数据。
4 .根据权利要求3所述的一种柔性可穿戴生物磁场检测装置,其特征在于,还包括独立 的电源组件,所述电源组件包括电池、稳压芯片及无线充电线圈,所述电池连接稳压芯片及 无线充电线圈,所述稳压芯片的输出端连接通讯组件及处理组件。
5 .根据权利要求4所述的一种柔性可穿戴生物磁场检测装置,其特征在于,所述柔性基 底表面设有若干凸起,所述传感组件、处理组件、通讯组件及电源组件设置在凸起上。
【CN109870664A】一种磁场测量系统及测量方法【专利】
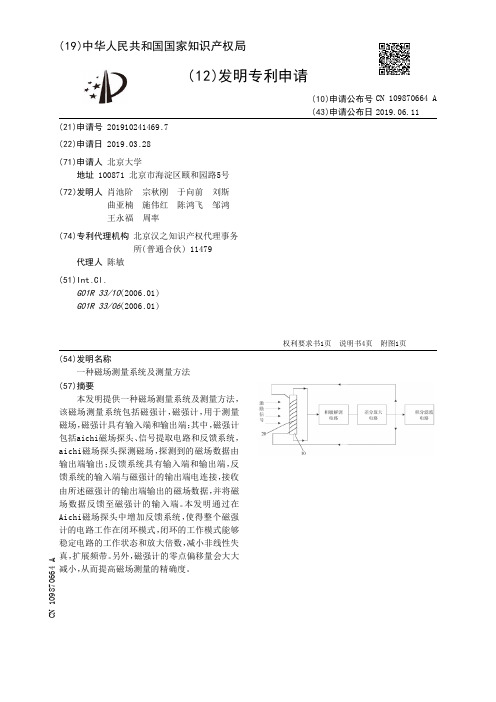
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910241469.7(22)申请日 2019.03.28(71)申请人 北京大学地址 100871 北京市海淀区颐和园路5号(72)发明人 肖池阶 宗秋刚 于向前 刘斯 曲亚楠 施伟红 陈鸿飞 邹鸿 王永福 周率 (74)专利代理机构 北京汉之知识产权代理事务所(普通合伙) 11479代理人 陈敏(51)Int.Cl.G01R 33/10(2006.01)G01R 33/06(2006.01)(54)发明名称一种磁场测量系统及测量方法(57)摘要本发明提供一种磁场测量系统及测量方法,该磁场测量系统包括磁强计,磁强计,用于测量磁场,磁强计具有输入端和输出端;其中,磁强计包括aichi磁场探头、信号提取电路和反馈系统,aichi磁场探头探测磁场,探测到的磁场数据由输出端输出;反馈系统具有输入端和输出端,反馈系统的输入端与磁强计的输出端电连接,接收由所述磁强计的输出端输出的磁场数据,并将磁场数据反馈至磁强计的输入端。
本发明通过在Aichi磁场探头中增加反馈系统,使得整个磁强计的电路工作在闭环模式,闭环的工作模式能够稳定电路的工作状态和放大倍数,减小非线性失真,扩展频带。
另外,磁强计的零点偏移量会大大减小,从而提高磁场测量的精确度。
权利要求书1页 说明书4页 附图1页CN 109870664 A 2019.06.11C N 109870664A权 利 要 求 书1/1页CN 109870664 A1.一种磁场测量系统,其特征在于,包括:磁强计,用于测量所述磁场,所述磁强计具有输入端和输出端,所述磁强计包括aichi 磁场探头、信号提取电路和反馈系统,所述aichi磁场探头探测所述磁场,探测到的磁场数据由所述输出端输出;所述反馈系统具有输入端和输出端,所述反馈系统的输入端与所述磁强计的所述输出端电连接,接收由所述磁强计的输出端输出的所述磁场数据,并将所述磁场数据反馈至所述磁强计的输入端。
【CN109533396A】一种基于磁测磁控的卫星自旋定向方法【专利】
( 12 )发明专利申请
(21)申请号 201910040796 .6
(22)申请日 2019 .01 .16
(71)申请人 上海微小卫星工程中心 地址 201203 上海市浦东新区海科路99号4 号楼
(72)发明人 夏喜旺 郭崇滨 陈宏宇 张科科 周世龙
技术领域 [0001] 本发明涉及航天器姿态控制的技术领域。具体而言,本发明涉及一种基于磁测磁 控的卫星自旋定向方法。
背景技术 [0002] 卫星的姿态控制是指对卫星绕质心施加力矩,以保持或按需要改变其在空间定向 的 技术。卫星的 姿态控制系统在卫星的实际 运行 和控制过程中扮演了十分重要的 角色 ,能 够确保卫星飞行过程中姿态的确定和调整,从而顺利完成既定的飞行任务。 [0003] 不同类型的卫星对姿态控制有不同的要求,卫星的姿态控制包括被动姿态控制和 主动姿态控制。姿态敏感器用于测量卫星本体坐标系统相对于某一基准坐标系的相对位置 和角速度,以确定卫星的姿态。卫星系统还包括控制器,控制器根据卫星的姿态和给定的要 求指示执行机构工作。执行机构则根据控制器指令产生相应的控制力矩从而改变卫星的姿 态。 [0004] 利用地磁场来控制卫星的姿态是一种既简单又可靠的方法。因此磁控系统是当前 卫星控制系统中常 用的控制系统。考虑到磁控作用总是垂直于当地磁力线的 ,纯磁控卫星 的姿态稳定系统实际上是欠驱动的控制系统。自旋稳定对于姿态控制欠驱动的卫星而言至 关重要,其关系到卫星的任务实施、能源获取甚至生命安全;对于运行于晨昏轨道上的卫星 而言 ,结合太阳帆板的 布局 ,自 旋稳定可以 实现卫星的帆板对日。B-dot速率阻 尼算法是一 种可靠的非线性姿态控制算法,其通过降低卫星转动动能来实现三轴角速度的降低。
【CN109806496A】一种短波磁振治疗仪【专利】
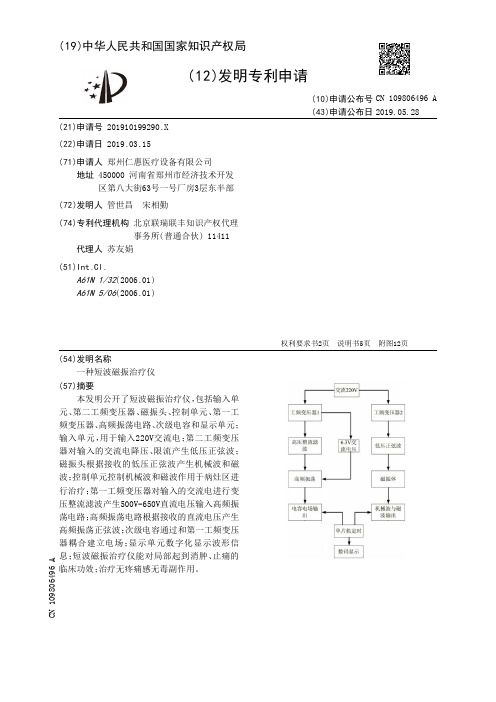
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910199290.X(22)申请日 2019.03.15(71)申请人 郑州仁惠医疗设备有限公司地址 450000 河南省郑州市经济技术开发区第八大街63号一号厂房3层东半部(72)发明人 管世昌 宋相勤 (74)专利代理机构 北京联瑞联丰知识产权代理事务所(普通合伙) 11411代理人 苏友娟(51)Int.Cl.A61N 1/32(2006.01)A61N 5/06(2006.01)(54)发明名称一种短波磁振治疗仪(57)摘要本发明公开了短波磁振治疗仪,包括输入单元、第二工频变压器、磁振头、控制单元、第一工频变压器、高频振荡电路、次级电容和显示单元;输入单元,用于输入220V交流电;第二工频变压器对输入的交流电降压、限流产生低压正弦波;磁振头根据接收的低压正弦波产生机械波和磁波;控制单元控制机械波和磁波作用于病灶区进行治疗;第一工频变压器对输入的交流电进行变压整流滤波产生500V -650V直流电压输入高频振荡电路;高频振荡电路根据接收的直流电压产生高频振荡正弦波;次级电容通过和第一工频变压器耦合建立电场;显示单元数字化显示波形信息;短波磁振治疗仪能对局部起到消肿、止痛的临床功效;治疗无疼痛感无毒副作用。
权利要求书2页 说明书5页 附图12页CN 109806496 A 2019.05.28C N 109806496A权 利 要 求 书1/2页CN 109806496 A1.一种短波磁振治疗仪,其特征在于,包括输入单元、第二工频变压器、磁振头、控制单元、第一工频变压器、高频振荡电路、次级电容和显示单元;所述输入单元,用于输入220V交流电;所述第二工频变压器,用于对输入的交流电降压、限流产生低压正弦波;所述磁振头,用于根据接收的低压正弦波产生机械波和磁波;所述控制单元,用于控制机械波和磁波作用于病灶区进行治疗;所述第一工频变压器,用于对输入的交流电进行变压整流滤波产生500V-650V直流电压输入高频振荡电路;所述高频振荡电路,用于根据接收的直流电压产生高频振荡正弦波;所述次级电容,通过和第一工频变压器耦合建立电场;所述显示单元,用于数字化显示波形信息。
【CN109986685A】一种基于磁力作用的固定机构【专利】
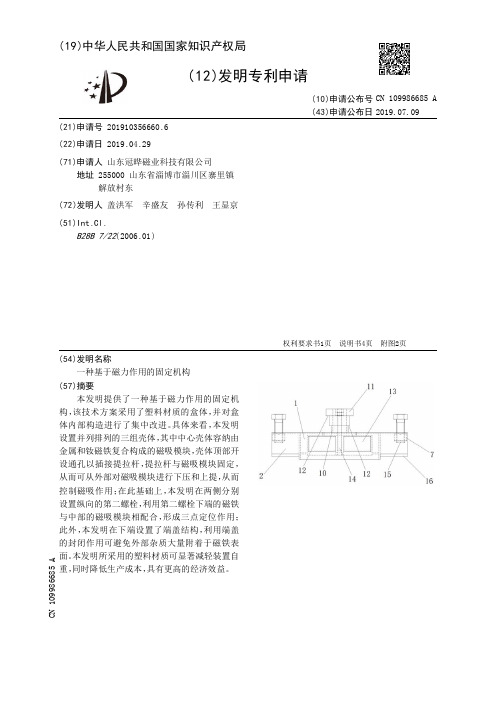
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910356660.6(22)申请日 2019.04.29(71)申请人 山东冠晔磁业科技有限公司地址 255000 山东省淄博市淄川区寨里镇解放村东(72)发明人 盖洪军 辛盛友 孙传利 王显京 (51)Int.Cl.B28B 7/22(2006.01)(54)发明名称一种基于磁力作用的固定机构(57)摘要本发明提供了一种基于磁力作用的固定机构,该技术方案采用了塑料材质的盒体,并对盒体内部构造进行了集中改进。
具体来看,本发明设置并列排列的三组壳体,其中中心壳体容纳由金属和钕磁铁复合构成的磁吸模块,壳体顶部开设通孔以插接提拉杆,提拉杆与磁吸模块固定,从而可从外部对磁吸模块进行下压和上提,从而控制磁吸作用;在此基础上,本发明在两侧分别设置纵向的第二螺栓,利用第二螺栓下端的磁铁与中部的磁吸模块相配合,形成三点定位作用;此外,本发明在下端设置了端盖结构,利用端盖的封闭作用可避免外部杂质大量附着于磁铁表面。
本发明所采用的塑料材质可显著减轻装置自重,同时降低生产成本,具有更高的经济效益。
权利要求书1页 说明书4页 附图2页CN 109986685 A 2019.07.09C N 109986685A权 利 要 求 书1/1页CN 109986685 A1.一种基于磁力作用的固定机构,其特征在于包括中心壳体(1),侧方壳体(2),中心通孔(3),隔套(4),侧方通孔(5),内螺纹套(6),下凸出管(7),第一肋板(8),第二肋板(9),提拉杆(10),端帽(11),台阶(12),金属块(13),第一螺栓(14),第二螺栓(15),下端盖(16),钕磁铁(17),其中,在中心壳体(1)的两侧各连接有侧方壳体(2),中心壳体(1)的下端以及侧方壳体(2)的下端均具有敞口,在中心壳体(1)的顶板上开设有中心通孔(3),在所述中心通孔(3)中插接固定有隔套(4),在中心壳体(1)的顶板下端固定连接有下凸出管(7),所述下凸出管(7)位于隔套(4)的外周;在侧方壳体(2)的顶板上开设有侧方通孔(5),在所述侧方通孔(5)中插接固定有内螺纹套(6),所述内螺纹套(6)的内壁上开设有内螺纹,在侧方壳体(2)的顶板下端、位于内螺纹套(6)外周的位置也固定连接有下凸出管(7);在所述下凸出管(7)的外壁与中心壳体(1)的顶板之间固定连接有若干第一肋板(8),在所述下凸出管(7)的外壁与侧方壳体(2)的顶板之间固定连接有若干第一肋板(8),在中心壳体(1)的顶板与侧壁之间固定连接有若干第二肋板(9),在侧方壳体(2)的顶板与侧壁之间固定连接有若干第二肋板(9);提拉杆(10)插接在所述隔套(4)中,所述提拉杆(10)的上端位于中心壳体(1)的顶板上方,在中心壳体(1)的顶板下方具有金属块(13),所述提拉杆(10)的下端与金属块(13)固定连接,在所述提拉杆(10)的上端连接有端帽(11),所述端帽(11)的下端具有台阶(12),在所述金属块(13)中内置有若干钕磁铁(17),第一螺栓(14)贯穿金属块(13)并与提拉杆(10)固定连接;第二螺栓(15)丝接在所述内螺纹套(6)中,在所述第二螺栓(15)的下端固定连接有磁铁;所述侧方壳体(2)下端的敞口由下端盖(16)封闭,下端盖(16)与侧方壳体(2)之间由塑料焊枪焊接固定;所述中心壳体(1)、侧方壳体(2)、下凸出管(7)、第一肋板(8)、第二肋板(9)、下端盖(16)均为塑料材质。