矩阵求导的一些公式
对矩阵的迹求导

对矩阵的迹求导对矩阵的迹求导矩阵是数学中重要的概念之一,它广泛地应用于各个领域中。
在矩阵运算中,对矩阵的迹求导是一个十分重要的问题。
本文将从矩阵、矩阵的迹以及对矩阵的迹求导等方面进行阐述和探讨。
一、矩阵的概念和运算矩阵是一个非常重要的数学概念,不仅涉及数学本身,还涉及到其他领域,如物理、化学、经济学、计算机科学等等。
矩阵可以看作是由数个数排成一排(称之为行)或一列(称之为列),比如:$$ \begin{bmatrix} 1 & 2 & 3\\ 4 & 5 & 6\\ 7 & 8 & 9 \end{bmatrix} $$其中包含了3行3列9个数,它被称为一个3x3的矩阵。
我们可以对矩阵进行加、减、乘等操作,其中加法和减法很容易理解,乘法有两种情形。
1. 矩阵与标量相乘给定一个标量k和一个矩阵A,我们可以定义矩阵与标量的乘法,即:$$ kA= \begin{bmatrix} ka_{11} & ka_{12} &\cdots & ka_{1n} \\ ka_{21} & ka_{22} & \cdots &ka_{2n} \\ \vdots & \vdots & \ddots & \vdots \\ka_{m1} & ka_{m2} & \cdots & ka_{mn} \end{bmatrix} $$eg.$$ 3\cdot \begin{bmatrix} 1 & 2\\ 3 & 4\end{bmatrix} = \begin{bmatrix} 3 & 6\\ 9 & 12\end{bmatrix} $$2. 矩阵与矩阵相乘对于两个矩阵A和B,只有当A的列数与B的行数相同时,它们才可以相乘。
那么,它们的乘积C的定义为:$$ C_{i,j}=\sum_{k=1}^{m}A_{i,k}B_{k,j} $$其中,m表示A和B中的矩阵元素的数量。
2×2矩阵求导法则
2×2矩阵求导法则矩阵求导法则矩阵求导应该分为标量求导、向量求导、矩阵求导三个方面来介绍,公式繁多,但仔细看看其实是有规律可循的。
标量求导无论是矩阵、向量对标量求导,或者是标量对矩阵、向量求导,其结论都是一样的:等价于对矩阵(向量)的每个分量求导,并且保持维数不变。
例如,我们可以计算标量对向量求导:设yy为一个元素,xT=[x1~xq]xT=[x1~xq]是qq维行向量,则:∂y∂xT=[∂y∂x1~∂y∂xq]∂y∂xT=[∂y∂x1~∂y∂xq]向量求导对于向量求导,我们可以先将向量看做一个标量,然后使用标量求导法则,最后将向量形式化为标量进行。
例如,我们可以计算行向量对列向量求导:设yT=[y1~yn]yT=[y1~yn]是nn维行向量,x=[x1,~,xp]x=[x1,~,xp]是pp维列向量,则:∂yT∂x==[∂y1∂x~∂yn∂x]⎡⎡⎡⎡⎡∂y1∂x1~∂y1∂xp~~~∂yn∂x1~∂yn∂xp⎡⎡⎡⎡⎡∂yT∂x=[∂y1∂x~∂yn∂x]=[∂y1∂x1~∂yn∂x1~~~∂y1∂xp~∂yn∂xp]矩阵求导与向量求导类似,先将矩阵化当做一个标量,再使用标量对矩阵的运算进行。
例如,我们可以计算矩阵对列向量求导:设Y=⎡⎡⎡y11~ym1~~~y1n~ymn⎡⎡⎡Y=[y11~y1n~~~ym1~ymn]是m×nm×n矩阵,x=[x1,~,xp]x=[x1,~,xp]是pp维列向量,则:∂Y∂x=[∂Y∂x1,~,∂Y∂xp]∂Y∂x=[∂Y∂x1,~,∂Y∂xp]矩阵微积分常见求导性质实值函数相对于实向量的梯度设f(x)=x=[x1,~,xn]Tf(x)=x=[x1,~,xn]T∂f(x)∂xT=∂x∂xT=In×n∂f(x)∂xT=∂x∂xT=In×n∂(f(x))T∂x=∂xT∂x=In×n∂(f(x))T∂x=∂xT∂x=In×n∂f(x)∂x=∂x∂x=vec(In×n)∂f(x)∂x=∂x∂x=vec(In×n)∂(f(x))T∂xT=∂xT∂xT=vec(In×n)T∂(f(x))T∂xT=∂xT∂xT=vec(In×n)T其中,vecvec表示向量化矩阵,按列将矩阵表示为向量,具体可见Wikipedia。
矩阵求导公式
转载]矩阵求导公式【转】(2011-11-15 11:03:34)转载▼标签:转载原文地址:矩阵求导公式【转】作者:三寅今天推导公式,发现居然有对矩阵的求导,狂汗--完全不会。
不过还好网上有人总结了。
吼吼,赶紧搬过来收藏备份。
基本公式:Y = A * X --> DY/DX = A'Y = X * A --> DY/DX = AY = A' * X * B --> DY/DX = A * B'Y = A' * X' * B --> DY/DX = B * A'1. 矩阵Y对标量x求导:相当于每个元素求导数后转置一下,注意M×N矩阵求导后变成N×M了Y = [y(ij)] --> dY/dx = [dy(ji)/dx]2. 标量y对列向量X求导:注意与上面不同,这次括号内是求偏导,不转置,对N×1向量求导后还是N×1向量y = f(x1,x2,..,xn) --> dy/dX = (Dy/Dx1,Dy/Dx2,..,Dy/Dxn)'3. 行向量Y'对列向量X求导:注意1×M向量对N×1向量求导后是N×M矩阵。
将Y的每一列对X求偏导,将各列构成一个矩阵。
重要结论:dX'/dX = Id(AX)'/dX = A'4. 列向量Y对行向量X’求导:转化为行向量Y’对列向量X的导数,然后转置。
注意M×1向量对1×N向量求导结果为M×N矩阵。
dY/dX' = (dY'/dX)'5. 向量积对列向量X求导运算法则:注意与标量求导有点不同。
d(UV')/dX = (dU/dX)V' + U(dV'/dX)d(U'V)/dX = (dU'/dX)V + (dV'/dX)U'重要结论:d(X'A)/dX = (dX'/dX)A + (dA/dX)X' = IA + 0X' = Ad(AX)/dX' = (d(X'A')/dX)' = (A')' = Ad(X'AX)/dX = (dX'/dX)AX + (d(AX)'/dX)X = AX + A'X6. 矩阵Y对列向量X求导:将Y对X的每一个分量求偏导,构成一个超向量。
方向余弦矩阵求导

方向余弦矩阵求导一、引言方向余弦矩阵是描述一个坐标系相对于另一个坐标系的旋转关系的重要工具。
在机器人学、导航等领域中,方向余弦矩阵被广泛应用。
本文将介绍方向余弦矩阵的求导方法。
二、方向余弦矩阵1. 定义方向余弦矩阵是描述两个坐标系之间旋转关系的矩阵,通常记作C,其元素为cosine值。
例如,Cij表示第i个轴在第j个轴上的cosine 值。
2. 性质方向余弦矩阵具有以下性质:(1)正交性:C*C^T=I,其中I为单位矩阵。
(2)行列式为1:det(C)=1。
(3)逆矩阵等于转置:C^-1=C^T。
3. 求解方法求解方向余弦矩阵的方法有多种,其中最常用的是欧拉角法和四元数法。
这里不再赘述。
三、方向余弦矩阵求导1. 求导公式在机器人学和导航等领域中,需要对方向余弦矩阵进行求导。
下面给出求解dC/dt的公式:dC/dt=[ω]×C其中,[ω]表示角速度向量的斜对称矩阵,即[ω]=| 0 -ωz ωy || ωz 0 -ωx ||-ωy ωx 0 |2. 推导过程推导过程如下:设旋转矩阵为R(t),则其微小变化可以表示为:dR=R(t+dt)-R(t)由于R是正交矩阵,因此有:dR^T=-dR即(R+dR)^T=R^T-dR^T两边同时左乘R,得到:RR^T=(R+dR)(R+dR)^T=R(R^T-dR^T)(R+dR)^T=RR^T-dRR^T-dRR^T+d(dRR^T)因为dRR^T是一个二阶小量,可以忽略。
因此有:dRR^T=-d(dRR^T)我们要求的是旋转矩阵的微分dC/dt。
由于C=RR^-1,因此有:dC=d(RR^-1)/dt=d(R^-1)/dt R+ R d(R^-1)/dt根据导数的定义和上面推导出来的式子,可以得到:d(R^-1)/dt=-[ω]×(R^-1)将上面两个式子带入到原式中,得到:dC/dt=[ω]×(CR)由于C是正交矩阵,因此有:dC/dt=[ω]×C四、总结本文介绍了方向余弦矩阵的定义、性质和求解方法,并给出了方向余弦矩阵求导的公式和推导过程。
矩阵求导的链式法则

矩阵求导的链式法则一、引言矩阵求导是数学中的重要概念,广泛应用于各个领域,如机器学习、优化等。
在矩阵求导的过程中,链式法则是一种常用且强大的工具,用于求解复合函数的导数。
本文将详细介绍矩阵求导的链式法则,并探讨其在实际问题中的应用。
二、矩阵求导的基本概念在进一步了解矩阵求导的链式法则之前,首先需要了解矩阵求导的基本概念。
对于一个矩阵函数,我们可以将其看作是一个将矩阵映射到矩阵的函数。
假设有一个矩阵函数f:ℝm×n→ℝp×q,我们希望求解其导数∂f∂X ,其中X∈ℝm×n。
矩阵求导的目标是找到一个与X同维度的矩阵,使得该矩阵的元素分别是f对X中相应元素的导数。
三、链式法则的概念链式法则是微积分中的一条基本规则,用于计算复合函数的导数。
对于多个函数的复合,链式法则告诉我们如何求解复合函数的导数。
在矩阵求导中,链式法则同样适用,并且可以帮助我们简化复杂函数的导数计算。
链式法则的基本形式如下:∂f(g(X))∂X =∂f(g(X))∂g(X)⋅∂g(X)∂X其中,f和g分别是函数,X是自变量。
该公式表明,要计算复合函数f(g(X))对X的导数,可以先计算f对g(X)的导数,再乘以g(X)对X的导数。
四、矩阵求导的链式法则推导接下来,我们将推导矩阵求导的链式法则。
假设有两个矩阵函数F:ℝm×n→ℝp×q 和G:ℝp×q→ℝr×s,我们希望求解复合函数H=G(F(X))对X的导数。
根据链式法则,可以得到如下的推导过程:1.首先,计算复合函数H对X的导数:∂H ∂X =∂G(F(X))∂X2.根据链式法则,将复合函数拆分为两个部分:∂G(F(X))∂X =∂G(F(X))∂F(X)⋅∂F(X)∂X3.计算导数的乘积项:–计算∂G(F(X))∂F(X):根据矩阵求导的定义,可以逐元素地计算G对F(X)的导数。
–计算∂F(X)∂X:同样地,根据矩阵求导的定义,可以逐元素地计算F 对X的导数。
旋转矩阵的导数公式(一)

旋转矩阵的导数公式(一)旋转矩阵的导数公式1. 旋转矩阵的定义旋转矩阵是一种表示二维或三维旋转变换的矩阵。
在二维情况下,旋转矩阵是一个2x2矩阵,而在三维情况下,旋转矩阵是一个3x3矩阵。
一般来说,旋转矩阵可以通过角度来定义,例如在二维情况下:R(theta) = [cos(theta) -sin(theta)][sin(theta) cos(theta)]其中theta表示旋转角度。
2. 旋转矩阵的导数公式在矩阵求导的过程中,旋转矩阵的导数公式是非常有用的。
根据这些公式,我们可以更方便地计算旋转矩阵的导数。
二维情况下的旋转矩阵导数公式二维情况下,旋转矩阵的导数公式如下:dR(theta)/dtheta = [-sin(theta) -cos(theta)][ cos(theta) -sin(theta)]这个公式表示,在二维旋转中,旋转矩阵关于旋转角度的导数等于一个特殊的矩阵。
三维情况下的旋转矩阵导数公式三维情况下,旋转矩阵的导数公式具有一定的复杂性,但也可以通过一个简洁的形式给出。
假设旋转矩阵为R,对应的旋转向量为omega,则旋转矩阵的导数公式如下:dR/dtheta = J(omega)其中J(omega)表示一个特殊的3x3矩阵,被称为旋转矩阵的“雅可比矩阵”。
3. 公式应用举例二维旋转矩阵导数公式应用假设我们有一个二维的旋转变换,其旋转角度为theta = pi/4,则根据二维情况下的旋转矩阵导数公式,可以得到:dR(theta)/dtheta = [-sin(theta) -cos(theta)][ cos(theta) -sin(theta)]dR(pi/4)/dtheta = [-sin(pi/4) -cos(pi/4)][ cos(pi/4) -sin(pi/4)]= [-1/sqrt(2) -1/sqrt(2)][ 1/sqrt(2) -1/sqrt(2)]这样,我们就得到了旋转角度为pi/4时,二维旋转矩阵关于旋转角度的导数。
矩阵导数
矩阵的导数运算1. 矩阵Y=F(x )对标量x 求导相当于每个元素求导数111122212212()()()()()()()()()n n m m mn df x df x df x dx dx dx df x df x df x d dx dx dx dx df x df x df x dxdx dx ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦Y2. 标量y 对列向量x 求导注意与上面不同,这次括号内是求偏导,对m×1向量求导后还是m×1向量12()m f x f dy x y f d f x ∂⎡⎤⎢⎥∂⎢⎥∂⎢⎥⎢⎥∂=→=⎢⎥⎢⎥⎢⎥∂⎢⎥⎢⎥∂⎣⎦x x3. 行向量y T 对列向量x 求导注意1×n 向量对m×1向量求导后是m×n 矩阵。
将y 的每一列对x 求偏导,将各列构成一个矩阵。
121111222212()()()()()()()()()n n T n mm m f x f x f x x x x f x f x f x d x x x d f x f x f x x x x ∂∂∂⎡⎤⎢⎥∂∂∂⎢⎥∂⎢∂∂⎥⎢⎥∂∂∂=⎢⎥⎢⎥⎢⎥∂∂∂⎢⎥⎢⎥∂∂∂⎣⎦y x 重要结论: ()TT Td d d d ==x I x Ax A x4. 列向量y 对行向量x T 求导转化为行向量y T对列向量x 的导数,然后转置。
注意m×1向量对1×n 向量求导结果为m×n 矩阵。
121111222212()()()()()()()()()Tm T m T T m nn n f x f x f x x x x f x f x f x d d x x x d d f x f x f x x x x ∂∂∂⎡⎤⎢⎥∂∂∂⎢⎥∂⎢∂∂⎥⎛⎫⎢⎥∂∂∂== ⎪⎢⎥⎝⎭⎢⎥⎢⎥∂∂∂⎢⎥⎢⎥∂∂∂⎣⎦y y x x 重要结论: ()T T d d d d ==x I x Ax A x5. 向量积对列向量x 求导运算法则注意与标量求导有点不同。
多元函数 矩阵 求导

多元函数矩阵求导
多元函数的矩阵求导是微积分中的一个重要内容,它涉及到矩
阵的偏导数和梯度等概念。
首先,我们来看多元函数的梯度。
对于
一个多元函数,如果其自变量是一个n维向量,因变量是一个标量,那么这个函数的梯度就是一个n维向量,其中每个分量分别是函数
对自变量的偏导数。
假设有一个多元函数f(x1, x2, ..., xn),那
么它的梯度可以表示为∇f = [∂f/∂x1, ∂f/∂x2, ...,
∂f/∂xn]。
这里∂f/∂xi表示函数f对自变量xi的偏导数。
接下来我们来看矩阵的求导。
对于一个矩阵函数F(X),其中X
是一个矩阵,我们可以对其进行求导。
如果F(X)的每个元素都是关
于X的函数,那么F(X)的导数就是一个与X同型的矩阵,其中每个
元素是对应元素的偏导数。
具体来说,如果F(X)是一个m×n的矩
阵函数,那么它的导数就是一个m×n的矩阵,其中第i行第j列的
元素是∂Fij/∂Xkl,其中k是第i行,l是第j列。
在实际应用中,多元函数的矩阵求导常常用于优化问题、机器
学习和深度学习等领域。
通过对多元函数的梯度和矩阵的导数进行
求解和分析,可以帮助我们理解函数的变化规律,并且为优化算法
的设计提供重要的数学基础。
在深度学习中,梯度下降法等优化算
法的实现也离不开对多元函数的矩阵求导。
总之,多元函数的矩阵求导是一项重要且复杂的数学工作,它在实际问题中有着广泛的应用,并且对于理解和解决实际问题具有重要意义。
希望我的回答能够帮助你更好地理解这一内容。
矩阵内积求导法则
矩阵内积求导法则全文共四篇示例,供读者参考第一篇示例:矩阵内积求导法则是矩阵微积分中非常重要的一个内容,它在机器学习、优化问题、计算机图形学等领域都有着广泛的应用。
本篇文章将详细介绍矩阵内积求导法则的定义、推导过程以及实际应用。
一、定义矩阵内积指的是两个矩阵相乘得到的结果。
设有两个矩阵A和B,它们的内积记为C,记作C=A*B。
在矩阵内积中,两个矩阵的行数和列数要满足一定的要求,具体而言,如果矩阵A的维度为m×n,矩阵B的维度为n×p,那么它们的内积矩阵C的维度为m×p。
二、矩阵内积的求导法则在矩阵微积分中,我们经常需要对矩阵内积进行求导。
矩阵内积的求导法则可以表示为:若有两个矩阵A和B,它们的内积C=A*B,则C对任意一个矩阵的导数可以表示为:∂C/∂A = B^TB^T表示B的转置矩阵。
同理,C对B的导数可以表示为:这个法则的推导过程可以通过矩阵的展开式进行证明,这里不再详述。
这个法则对于矩阵微积分来说是非常重要的,它可以帮助我们快速求解复杂的矩阵导数。
三、实际应用矩阵内积的求导法则在机器学习和优化算法中有着广泛的应用。
在机器学习中,我们经常需要通过梯度下降等方法来最小化损失函数,这就会涉及到对损失函数关于模型参数(矩阵)的导数计算。
利用矩阵内积的求导法则,我们可以快速有效地计算出损失函数对参数的导数,从而完成参数的更新。
在计算机图形学中,矩阵内积求导法则也有着重要的应用。
在图形变换和动画建模等领域,我们经常需要对矩阵进行变换和运动操作,这就需要对矩阵的导数进行计算。
通过矩阵内积的求导法则,我们可以准确地获得矩阵变换的导数,从而实现图形的平移、旋转和缩放等操作。
第二篇示例:矩阵内积是矩阵乘法的一种形式,通常用于描述多个向量之间的关系。
在机器学习和深度学习领域,矩阵内积求导是一项重要的计算任务,它能够帮助我们优化模型并提高模型的性能。
矩阵内积求导法则是求解矩阵内积的导数的规则和方法,其基本原理是通过链式法则和向量微积分等基本数学知识来推导出矩阵内积的导数表达式。
矩阵求导的神经网络算法
矩阵求导的神经网络算法在神经网络中,矩阵求导是非常重要的算法之一。
它能够帮助我们求得代价函数在所有参数上的梯度,从而在训练神经网络时进行反向传播优化。
本文将从矩阵求导的定义、优化问题以及实现细节三个方面介绍矩阵求导在神经网络中的应用。
1. 矩阵求导的定义矩阵求导是矩阵微积分中的一种重要运算。
我们知道,在单变量微积分中,求解函数的导数(即斜率)是一个非常重要的概念,而在多变量微积分中,导数则需要被扩展为矩阵形式。
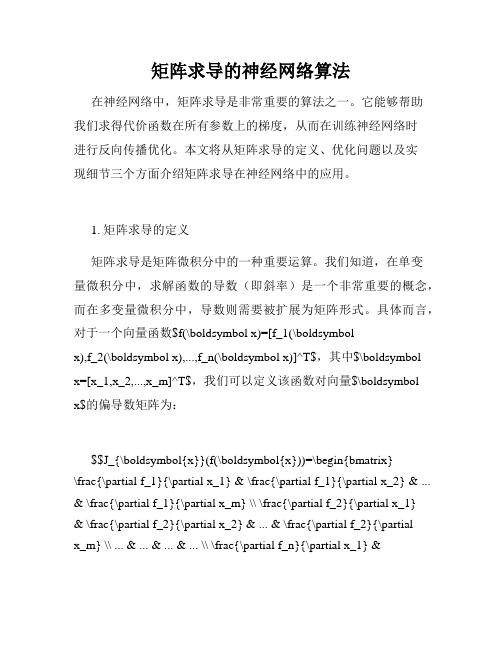
具体而言,对于一个向量函数$f(\boldsymbol x)=[f_1(\boldsymbolx),f_2(\boldsymbol x),...,f_n(\boldsymbol x)]^T$,其中$\boldsymbolx=[x_1,x_2,...,x_m]^T$,我们可以定义该函数对向量$\boldsymbolx$的偏导数矩阵为:$$J_{\boldsymbol{x}}(f(\boldsymbol{x}))=\begin{bmatrix}\frac{\partial f_1}{\partial x_1} & \frac{\partial f_1}{\partial x_2} & ... & \frac{\partial f_1}{\partial x_m} \\ \frac{\partial f_2}{\partial x_1}& \frac{\partial f_2}{\partial x_2} & ... & \frac{\partial f_2}{\partialx_m} \\ ... & ... & ... & ... \\ \frac{\partial f_n}{\partial x_1} &\frac{\partial f_n}{\partial x_2} & ... & \frac{\partial f_n}{\partial x_m} \end{bmatrix}$$其中,每个元素$\frac{\partial f_i}{\partial x_j}$表示函数$f_i$在$x_j$处的偏导数。
函数对矩阵求偏导公式
函数对矩阵求偏导公式
我们要找出一个函数对矩阵的偏导数的公式。
首先,我们需要了解什么是偏导数。
假设我们有一个函数 f(x, y, z),其中 x, y, z 是变量。
当我们固定 z 不变,然后对 x 求导时,我们得到的是 f 对 x 的偏导数。
同样地,如果我们固定 x 和 y 不变,然后对 z 求导,我们得到的是 f 对 z
的偏导数。
对于矩阵,我们可以使用同样的方法。
假设我们有一个函数 f(A),其中 A 是一个矩阵。
我们可以对 A 的每一个元素分别求偏导数。
具体来说,如果 A 是一个m×n 的矩阵,那么我们可以得到m×n 个偏导数。
对于 A 的第 i 行第 j 列的元素 A_ij,它的偏导数是:
∂f/∂A_ij
所以,对于一个m×n 的矩阵 A,它的偏导数是一个m×n 的矩阵,其 (i, j) 位置的元素是∂f/∂A_ij。
这就是函数对矩阵的偏导数的公式。
对数矩阵求导
对数矩阵求导对数矩阵是指矩阵中的每个元素都取对数的矩阵。
在机器学习和统计学中,对数矩阵经常被用来处理非负数据,以便更好地满足模型的要求。
对数矩阵的求导在某些场景下非常重要,本文将介绍对数矩阵的求导方法。
我们需要明确对数矩阵的定义。
对于一个非负的矩阵A,对数矩阵ln(A)的定义如下:ln(A) = [ln(A_11), ln(A_12), ..., ln(A_1n)ln(A_21), ln(A_22), ..., ln(A_2n)...ln(A_m1), ln(A_m2), ..., ln(A_mn)]其中A_ij表示矩阵A中第i行第j列的元素,ln表示自然对数。
在机器学习中,对数矩阵的求导常常用于梯度下降算法中,以更新模型参数。
下面我们将介绍如何对对数矩阵进行求导。
假设我们有一个目标函数J,其中J的输入是一个对数矩阵ln(A),输出是一个标量值。
我们希望求解目标函数J相对于矩阵A的导数,即∂J/∂A。
为了方便起见,我们将∂J/∂A记为dJ。
我们需要明确目标函数J的表达式。
假设J的表达式为J = f(ln(A)),其中f是一个将对数矩阵映射到标量的函数。
那么我们可以通过链式法则来求解dJ。
根据链式法则,dJ可以表示为dJ = ∂J/∂ln(A) * ∂ln(A)/∂A。
现在我们需要计算∂J/∂ln(A)和∂ln(A)/∂A。
我们计算∂J/∂ln(A)。
由于J是一个标量,∂J/∂ln(A)的维度应与ln(A)相同。
我们可以使用梯度下降算法来计算∂J/∂ln(A),其中梯度下降算法将目标函数的导数作为更新参数的依据。
我们计算∂ln(A)/∂A。
由于对数函数的导数是1/x,我们可以得到∂ln(A)/∂A的表达式:∂ln(A)/∂A = [1/A_11, 0, ..., 00, 1/A_22, ..., 0...0, 0, ..., 1/A_mn]我们可以将∂J/∂ln(A)和∂ln(A)/∂A相乘得到dJ。
考研数学一公式大全

考研数学涉及多个领域,而每个领域都有大量的公式和概念。
以下是一些考研数学中常见的公式:### 高等数学1. 微积分- 极限定义:$$\lim_{x \to a} f(x) = L$$- 求导法则:$\frac{d}{dx}(u \pm v) = u' \pm v'$,$\frac{d}{dx}(uv) = uv' + vu'$,$\frac{d}{dx}\left(\frac{u}{v}\right) = \frac{u'v -uv'}{v^2}$- 不定积分:$\int f(x) \,dx$- 定积分:$\int_a^b f(x) \,dx$2. 微分方程- 一阶线性微分方程:$y' + P(x)y = Q(x)$- 二阶线性常系数齐次微分方程:$ay'' + by' + cy = 0$### 线性代数1. 矩阵- 矩阵乘法:$C = A \cdot B$- 逆矩阵:$A^{-1}$- 行列式:$|A|$2. 向量- 向量点积:$ \mathbf{a} \cdot \mathbf{b} =|\mathbf{a}| |\mathbf{b}| \cos{\theta}$- 向量叉积:$ \mathbf{a} \times \mathbf{b} =|\mathbf{a}| |\mathbf{b}| \sin{\theta}$### 概率论与数理统计1. 概率- 条件概率:$P(A|B) = \frac{P(A \cap B)}{P(B)}$- 贝叶斯定理:$P(A|B) = \frac{P(B|A)P(A)}{P(B)}$2. 统计- 样本均值:$\bar{x} = \frac{\sum_{i=1}^{n} x_i}{n}$- 样本方差:$s^2 = \frac{\sum_{i=1}^{n} (x_i -\bar{x})^2}{n-1}$这只是一小部分的公式。
矩阵平方和求导

矩阵平方和求导
矩阵平方和求导是在矩阵分析中常见的操作。
当我们需要对一个由多个矩阵平方和组成的函数进行求导时,就需要用到矩阵平方和求导的技巧。
具体地,如果我们有一个函数$F(X)=sum_{i=1}^{n}
X_i^2$,其中$X_i$为一个矩阵,那么我们需要求出$frac{partial F}{partial X_i}$,即对每个矩阵$X_i$的梯度。
为了求解矩阵平方和的梯度,一种常见的方法是使用Frobenius 内积和Kronecker积的性质。
具体地,我们可以将$F(X)$表示为$F(X)=langle X,Xrangle_F$,其中$langlecdot,cdotrangle_F$为Frobenius内积。
然后,我们可以使用矩阵微积分中的链式法则,得到$frac{partial F}{partial X_i}=2X_i$,其中$2$是常数。
这个结果可以通过对$langle X,Xrangle_F$进行求导,然后应用Kronecker 积的性质得到。
总的来说,矩阵平方和求导是矩阵微积分中的一个重要问题,它在机器学习和优化领域中得到了广泛的应用。
通过使用Frobenius内积和Kronecker积的技巧,我们可以有效地计算出多个矩阵的平方和的梯度,从而实现更加高效的优化算法。
- 1 -。
二次型矩阵求导
二次型矩阵求导二次型矩阵在机器学习中有着广泛的应用,对于参数进行求导能够帮助我们优化模型,提高预测的准确度,下面将详细介绍二次型矩阵求导的相关知识和方法。
一、基本概念首先,我们来了解一下二次型矩阵的基本概念。
二次型矩阵是指一个矩阵与其自身的转置相乘并加上一个常量的线性运算形式,具体来说,设$A$是一个$n \times n$ 的矩阵,$x$是一个$n \times 1$的列向量,$b$是一个标量,那么二次型矩阵可以表示为:$$f(x)=x^{T} A x+b$$接下来,我们需要了解求导的相关概念。
在微积分中,求导是指函数在某一点上的斜率,表示函数的变化率。
它可以告诉我们函数的变化趋势,即函数的增长或减少方向。
二、标量对矩阵的求导假设$f(x)=x^{T} A x+b$,其中$x$是$n \times 1$的列向量,$A$是$n \times n$的矩阵,$b$是标量,现在我们需要对$f(x)$对矩阵$A$求导。
我们可以使用链式法则进行求导,具体来说,先对$f(x)$对$x$求导,然后对$x$对$A$求导,最后将两个结果相乘。
由于$f(x)$是一个标量,我们可以使用标量对向量的求导来求$f(x)$对$x$的求导。
接下来,我们需要求$x$对$A$的求导。
我们可以将$x$表示为一个列向量:$$x=\left[\begin{matrix}x_1 \\x_2 \\\vdots \\x_n\end{matrix}\right]$$然后,我们将$f(x)$的展开式中的$x$表示为列向量的形式: $$f(x)=\left[\begin{matrix}x_1 \\x_2 \\\vdots \\x_n\end{matrix}\right]^{T}\left[\begin{matrix}a_{11} & a_{12} & \cdots & a_{1n} \\a_{21} & a_{22} & \cdots & a_{2n} \\\vdots & \vdots & \ddots & \vdots \\a_{n1} & a_{n2} & \cdots & a_{nn}\end{matrix}\right]\left[\begin{matrix}x_1 \\x_2 \\\vdots \\x_n\end{matrix}\right]+b$$展开后的结果为:$$f(x) = \sum_{i=1}^{n} \sum_{j=1}^{n} a_{ij}x_i x_j+b$$通过求导规则,我们可以得出$f(x)$对$a_{ij}$的求导结果为:$$tr(AB)=tr(BA)$$对$f(X)$进行展开如下:我们可以将$f(X)$表示成如下形式:其中$X_{.j}$表示$X$的第$j$列,$\circ$表示Hadamard积(也叫Schur积),即两个矩阵对应元素相乘得到的矩阵,$\langle \cdot, \cdot \rangle$表示两个向量的内积。
矩阵、向量求导法则
∂yT ∂yT ∂x ∂x1q 11 T ∂y = ∂X T ∂yT ∂y ∂x ∂x pq p1
(13)
14. 列向量对矩阵求导
x11 x1q y1 设 y = 是 m 维列向量, X = 是 p × q 矩阵,则 x p1 x pq ym
矩阵、向量求导法则
矩阵、向量求导法则
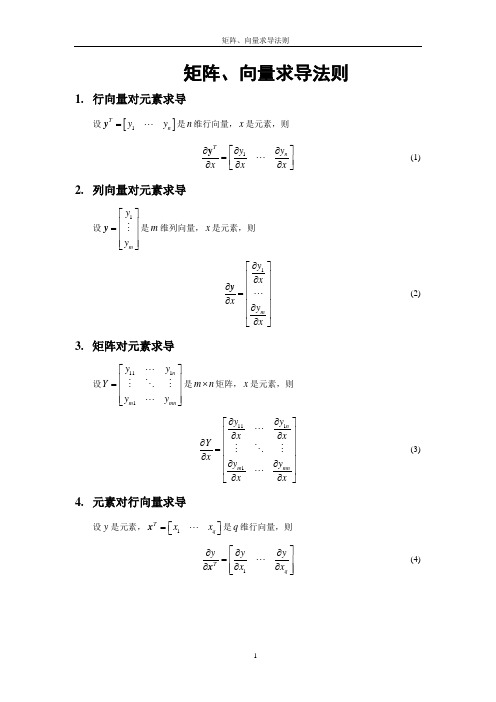
1. 行向量对元素求导
设 y = [ y1
T
yn ] 是 n 维行向量, x 是元素,则
∂yn ∂y T ∂y1 = ∂x ∂∂x
(1)
2. 列向量对元素求导
y1 设 y = 是 m 维列向量, x 是元素,则 ym
∂y1 ∂x ∂y = ∂x ∂y m ∂x
(2)
3. 矩阵对元素求导
y11 y1n 设Y = 是 m × n 矩阵, x 是元素,则 ym1 ymn
∂y1n ∂y11 ∂x ∂x ∂Y = ∂x ∂y ∂ymn m1 ∂x ∂x
∂y1 ∂x ∂y = ∂x ∂y m ∂x
(10)
11. 矩阵对行向量求导
y11 y1n T 设Y = 是 m × n 矩阵, x = x1 xq 是 q 维行向量,则 ym1 ymn
∂Y ∂Y ∂Y = T ∂x ∂xq ∂x1
(11)
12. 矩阵对列向量求导
x1 y11 y1n 是 m × n 矩阵, x = 是 p 维列向量,则 设Y = xp ym1 ymn
常用矩阵导数公式
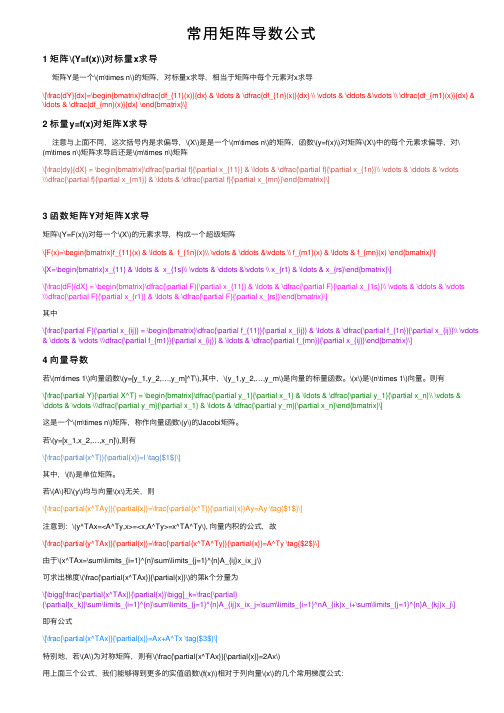
常⽤矩阵导数公式1 矩阵\(Y=f(x)\)对标量x求导矩阵Y是⼀个\(m\times n\)的矩阵,对标量x求导,相当于矩阵中每个元素对x求导\[\frac{dY}{dx}=\begin{bmatrix}\dfrac{df_{11}(x)}{dx} & \ldots & \dfrac{df_{1n}(x)}{dx} \\ \vdots & \ddots &\vdots \\ \dfrac{df_{m1}(x)}{dx} & \ldots & \dfrac{df_{mn}(x)}{dx} \end{bmatrix}\]2 标量y=f(x)对矩阵X求导注意与上⾯不同,这次括号内是求偏导,\(X\)是是⼀个\(m\times n\)的矩阵,函数\(y=f(x)\)对矩阵\(X\)中的每个元素求偏导,对\(m\times n\)矩阵求导后还是\(m\times n\)矩阵\[\frac{dy}{dX} = \begin{bmatrix}\dfrac{\partial f}{\partial x_{11}} & \ldots & \dfrac{\partial f}{\partial x_{1n}}\\ \vdots & \ddots & \vdots\\\dfrac{\partial f}{\partial x_{m1}} & \ldots & \dfrac{\partial f}{\partial x_{mn}}\end{bmatrix}\]3 函数矩阵Y对矩阵X求导矩阵\(Y=F(x)\)对每⼀个\(X\)的元素求导,构成⼀个超级矩阵\[F(x)=\begin{bmatrix}f_{11}(x) & \ldots & f_{1n}(x)\\ \vdots & \ddots &\vdots \\ f_{m1}(x) & \ldots & f_{mn}(x) \end{bmatrix}\]\[X=\begin{bmatrix}x_{11} & \ldots & x_{1s}\\ \vdots & \ddots &\vdots \\ x_{r1} & \ldots & x_{rs}\end{bmatrix}\]\[\frac{dF}{dX} = \begin{bmatrix}\dfrac{\partial F}{\partial x_{11}} & \ldots & \dfrac{\partial F}{\partial x_{1s}}\\ \vdots & \ddots & \vdots\\\dfrac{\partial F}{\partial x_{r1}} & \ldots & \dfrac{\partial F}{\partial x_{rs}}\end{bmatrix}\]其中\[\frac{\partial F}{\partial x_{ij}} = \begin{bmatrix}\dfrac{\partial f_{11}}{\partial x_{ij}} & \ldots & \dfrac{\partial f_{1n}}{\partial x_{ij}}\\ \vdots & \ddots & \vdots \\\dfrac{\partial f_{m1}}{\partial x_{ij}} & \ldots & \dfrac{\partial f_{mn}}{\partial x_{ij}}\end{bmatrix}\]4 向量导数若\(m\times 1\)向量函数\(y=[y_1,y_2,…,y_m]^T\),其中,\(y_1,y_2,…,y_m\)是向量的标量函数。
对行列式求导

对行列式求导
行列式是矩阵的一个重要性质,它在数学中有着广泛的应用。
在求解一些问题时,需要对行列式进行求导,以便得到更加精确的结果。
对于一个n阶行列式,其求导可以通过以下公式进行计算:
d(det(A))/dx = det(A) * tr(A^-1 * dA/dx)
其中,A为n阶方阵,tr表示矩阵的迹,^-1表示矩阵的逆。
这个公式的意义是,求导后的行列式等于原行列式乘以一个矩阵的迹,这个矩阵是原矩阵的逆矩阵和原矩阵对x的偏导数的乘积。
对于二阶行列式而言,其求导公式就变成了:
d(det(A))/dx = (a11*a22 - a12*a21)*(da11/dx*a22 +
a11*dA22/dx - da12/dx*a21 - a12*da21/dx)
其中,a11、a12、a21、a22表示二阶矩阵A的四个元素。
需要注意的是,行列式的求导需要一定的数学基础,且计算过程可能会比较复杂,需要耐心和细心。
但是,求导的结果能够为后续的计算提供更加精确的数据,因此对于需要精确计算的问题而言,行列式的求导是非常重要的。
- 1 -。
矩阵求导的一些公式
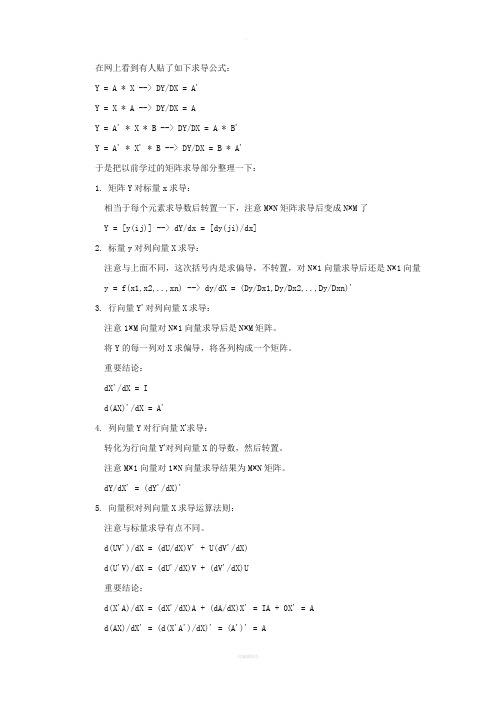
在网上看到有人贴了如下求导公式:Y = A * X --> DY/DX = A'Y = X * A --> DY/DX = AY = A' * X * B --> DY/DX = A * B'Y = A' * X' * B --> DY/DX = B * A'于是把以前学过的矩阵求导部分整理一下:1. 矩阵Y对标量x求导:相当于每个元素求导数后转置一下,注意M×N矩阵求导后变成N×M了Y = [y(ij)] --> dY/dx = [dy(ji)/dx]2. 标量y对列向量X求导:注意与上面不同,这次括号内是求偏导,不转置,对N×1向量求导后还是N×1向量y = f(x1,x2,..,xn) --> dy/dX = (Dy/Dx1,Dy/Dx2,..,Dy/Dxn)'3. 行向量Y'对列向量X求导:注意1×M向量对N×1向量求导后是N×M矩阵。
将Y的每一列对X求偏导,将各列构成一个矩阵。
重要结论:dX'/dX = Id(AX)'/dX = A'4. 列向量Y对行向量X’求导:转化为行向量Y’对列向量X的导数,然后转置。
注意M×1向量对1×N向量求导结果为M×N矩阵。
dY/dX' = (dY'/dX)'5. 向量积对列向量X求导运算法则:注意与标量求导有点不同。
d(UV')/dX = (dU/dX)V' + U(dV'/dX)d(U'V)/dX = (dU'/dX)V + (dV'/dX)U重要结论:d(X'A)/dX = (dX'/dX)A + (dA/dX)X' = IA + 0X' = Ad(AX)/dX' = (d(X'A')/dX)' = (A')' = Ad(X'AX)/dX = (dX'/dX)AX + (d(AX)'/dX)X = AX + A'X6. 矩阵Y对列向量X求导:将Y对X的每一个分量求偏导,构成一个超向量。
矩阵求导定义
矩阵求导定义
矩阵求导是对矩阵函数进行求导的过程。
它在数学、物理、工程、计算机科学等领域中都有广泛的应用。
矩阵求导的定义是将矩阵函数的导数定义为一个矩阵,该矩阵的每个元素都是矩阵函数对相应元素的偏导数。
具体地说,设矩阵函数为F(X),其中X是一个n×m的矩阵,那么它的导数DF(X)是一个n×m的矩阵,其中第i行第j列的元素是Fij(X)/Xij,即矩阵函数F(X)对第i行第j列元素Xij的偏导数。
矩阵求导是一种非常重要的数学工具,在机器学习、神经网络、优化算法等领域中都有广泛的应用。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在网上看到有人贴了如下求导公式:
Y = A * X --> DY/DX = A'
Y = X * A --> DY/DX = A
Y = A' * X * B --> DY/DX = A * B'
Y = A' * X' * B --> DY/DX = B * A'
于是把以前学过的矩阵求导部分整理一下:
1. 矩阵Y对标量x求导:
相当于每个元素求导数后转置一下,注意M×N矩阵求导后变成N×M了
Y = [y(ij)] --> dY/dx = [dy(ji)/dx]
2. 标量y对列向量X求导:
注意与上面不同,这次括号内是求偏导,不转置,对N×1向量求导后还是N×1向量
y = f(x1,x2,..,xn) --> dy/dX = (Dy/Dx1,Dy/Dx2,..,Dy/Dxn)'
3. 行向量Y'对列向量X求导:
注意1×M向量对N×1向量求导后是N×M矩阵。
将Y的每一列对X求偏导,将各列构成一个矩阵。
重要结论:
dX'/dX = I
d(AX)'/dX = A'
4. 列向量Y对行向量X’求导:
转化为行向量Y’对列向量X的导数,然后转置。
注意M×1向量对1×N向量求导结果为M×N矩阵。
dY/dX' = (dY'/dX)'
5. 向量积对列向量X求导运算法则:
注意与标量求导有点不同。
d(UV')/dX = (dU/dX)V' + U(dV'/dX)
d(U'V)/dX = (dU'/dX)V + (dV'/dX)U'
重要结论:
d(X'A)/dX = (dX'/dX)A + (dA/dX)X' = IA + 0X' = A
d(AX)/dX' = (d(X'A')/dX)' = (A')' = A
d(X'AX)/dX = (dX'/dX)AX + (d(AX)'/dX)X = AX + A'X
6. 矩阵Y对列向量X求导:
将Y对X的每一个分量求偏导,构成一个超向量。
注意该向量的每一个元素都是一个矩阵。
7. 矩阵积对列向量求导法则:
d(uV)/dX = (du/dX)V + u(dV/dX)
d(UV)/dX = (dU/dX)V + U(dV/dX)
重要结论:
d(X'A)/dX = (dX'/dX)A + X'(dA/dX) = IA + X'0 = A
8. 标量y对矩阵X的导数:
类似标量y对列向量X的导数,
把y对每个X的元素求偏导,不用转置。
dy/dX = [ Dy/Dx(ij) ]
重要结论:
y = U'XV = ΣΣu(i)x(ij)v(j) 于是dy/dX = = UV'
y = U'X'XU 则dy/dX = 2XUU'
y = (XU-V)'(XU-V) 则dy/dX = d(U'X'XU - 2V'XU + V'V)/dX = 2XUU' - 2VU' + 0 = 2(XU-V)U'
9. 矩阵Y对矩阵X的导数:
将Y的每个元素对X求导,然后排在一起形成超级矩阵。