二人形机器人精品PPT课件
人形机器人基础知识

人形机器人基础知识嘿,朋友们!今天咱来聊聊人形机器人那些事儿。
你说人形机器人像不像个超级厉害的“变形金刚”?只不过它们不是为了拯救世界,而是来帮助我们生活变得更美好的呀!想象一下,有个和人长得差不多的家伙,能帮你干各种活儿。
它可以帮你打扫房间,那动作说不定比你还利落呢!就像家里多了个不知疲倦的小助手。
而且它还能陪你聊天,不管你说啥,它都能接上话,这可比有些朋友靠谱多啦,哈哈!人形机器人的身体构造可复杂了呢。
那一双双灵活的“手”,可以完成各种精细的动作,简直就像魔术师一样神奇。
还有那能自由转动的“脑袋”,仿佛藏着无数的智慧。
它们的“眼睛”虽然不是真的眼睛,但却能看清周围的一切,比我们的眼睛还厉害呢!它们的“腿”能带着它们到处走,想去哪儿就去哪儿,多自由啊!再说说它们的“大脑”,那里面装着满满的知识和技能。
它们能快速地学习新东西,就像一块永远吸不满水的海绵。
你教它做一件事,它很快就能学会,然后做得又快又好。
这要是放在咱学习上,那不得个个都是学霸呀!人形机器人在好多地方都大显身手呢。
在工厂里,它们可以不知疲倦地工作,生产出各种产品,提高了效率,还降低了成本呢。
在医院里,它们可以帮忙照顾病人,给病人送药、送饭,多贴心呀!在一些危险的地方,比如火灾现场或者核辐射区域,它们可以代替人类去冒险,保护我们的安全,多勇敢啊!不过呢,人形机器人也不是完美无缺的。
它们有时候也会犯糊涂,做出一些让人哭笑不得的事情。
但这也正是它们可爱的地方呀,不是吗?那我们该怎么和人形机器人相处呢?这可得好好想想。
我们不能把它们当成纯粹的工具,而要把它们当成朋友。
和它们友好地交流,尊重它们。
它们虽然是机器,但也是有“感情”的呢。
总之,人形机器人是个很神奇的东西。
它们让我们的生活变得更加丰富多彩,更加便利。
我们要好好利用它们,让它们为我们服务,同时也要和它们和谐相处。
难道不是吗?人形机器人的未来一定会更加精彩,让我们一起期待吧!。
机器人第2讲.pptx

13
2-4 转动矩阵
3.绕一个坐标轴旋转的转动矩阵
绕X、Y、Z坐标轴的旋转(图2-3)变换矩阵是最基本的 转动矩阵,它们是一般转动矩阵的特例,故可直接由一般 转动矩阵得到。
2020/12/3
14
2-4 转动矩阵
3.绕一个坐标轴旋转的转动矩阵 由式(2-5)可得到绕x轴旋转θ角的转动矩阵为:
cos(x j , yi ) cos( y j , yi ) cos(z j , yi )
cos(
x
j
,
zi
)
(2-7)
cos( y j , zi )
cos(z
j
,
zi
)
[r] j [iR j ]1[r]i [ jRi ][r]i
[ jRi ] [iR j ]1 [iR j ]T
2020/12/3
1)
自由度(Degree DOF) :
of
Freedom,
Steห้องสมุดไป่ตู้art平台有18个关节,14
个连杆,18个关节有36个自由
度,代入上式得
F 6(14 18 1) 36 6
2020/12/3
4
第二章 机器人运动学
2-1概 述
机器人运动学是研究机器人各关节运动的
几何关系。
•
机器人可以看成开式运动链,由一系列连杆通过转动 或移动关节串联而成。
2020/12/3
1
自由度计算
1)对自于由6度自(由De度gr并ee联o机f器Fr人ee,do其m,结D构OF是)闭:环结构,主要优点是结构刚度大,
由6个油缸驱动,决定末端执行器的位置和姿态。油缸的1端与基座相连 (2自由度虎克铰),另1端与末端执行器相连(3自由度球铰),该机 器人将手臂和手腕的自由度集成在一起。主要特点为:刚度大,但运动 范围十分有限,运动学反解特别简单,而运动方程的建立特别复杂,有 时还不具备封闭的形式
三年级上册美术课件-第2课 机器人|人美版 (共24张PPT)课件

一双鞋,不管款式多新颖,包装多华丽 ,不耐 穿等于 摆设。 所以, 内涵很 重要。 但是,五年过去了。
我相信还不到痒的时候,可是,到底是 什么改 变了我 和他的 互动? 早晨起 床,他 的位置 往往已 空荡, 只能由 皱褶的 床单证 实他确 实存在 过,即 使他偶 尔睡过 了头或 者小赖 一下床 ,也绝 对是急 急忙忙 由床上 跳起来 ,匆忙 的梳洗 着衣。
一双鞋,品牌的很贵,杂牌的便宜。所 以,出 身很重 要。
一双鞋,少了一只,没用,既不值钱又 不能穿 。所以 ,另一 半很重 要。
一双鞋,在杂货摊只是几十元,在商场 里,在 专卖店 ,价格 瞬间涨 到好几 百。所 以,位 置很重 要。 一双鞋,新款的价格再贵也有人买,老 款的再 便宜也 没人喜 欢。所 以,不 断进步 ,更新 自己很 重要。
动动脑
你都知道有什么样的机 器人?他们都会干什么?
二、人形机器人

韩国科学家研制出“人型机器人”,会跳 舞、做家务、还会表达情绪。研究人员将 这款人型机器人取名为“马鲁”,马鲁身 高1.5米,可以模仿人类张开闭合嘴唇、 挤眉弄眼、上肢和下肢自如活动、会自动 停止行走。此外,马鲁还会表达自己的情 绪,高兴或生气时会散发出两种不同的香 味。这是由韩国科学技术院( KIST )研究 人员设计研发的,也是韩国首例。研发组 负责人You Bum-Jae说:“这种机器人为 人型机器人在家政服务领域的商业应用开 辟了道路,它可以边走边跳舞,还以代替 人来做家务。” 这一切都是通过先进的动作捕捉系统 来实现的,可以效仿多种人类动作,在行 走时如果遇到障碍物,灵活的双手可以搬 走障碍物
人形机器人(课堂PPT)

发展历程
• 类人型机器人的研究,最早可追溯至 西元1893年,Georges Moore创作了 第一个利用蒸气驱动类人型步行机器 [Rosheim, 1994],然详细构造与运 动原理我们并无法得知。其后在第一 次大战期间,Thring发明了具有腿之 农耕机[Thring, 1983]。至1970年之 间,许多研究人员进行辅助人类行走 的步行机器之研究,如Bernstein于 1948年于莫斯科义肢设计研究中心, 发展具电子装置的腿外骨骼 (Exosceleton)[Karsten, 2003]。
11
• 图1.3 日本产业技术综合研究所(AIST)HRP系列[3] 在西元2000年,SONY公司也发表了高50公分,重5公斤的小型机器人, SDR-3X[Kuroki, Ishida, and Yamaguchi, 2001](图1-3),每一只脚具有 六个自由度,不但会跳舞,还可单腿站立;而在2002年,SONY更发表了 最新一代的SDR-4X[Fujita, Kuroki, Ishida, and Doi, 2003](图1-4),它 的高度58公分、重6.5公斤,每一只脚同样具有六个自由度,除了具有前 一代SDR-3X的功能外,还可以在10mm的凹凸地面行走,上10度的斜坡, 甚至被推倒了还能自己站起来,可说是向家用机器人的目标,又迈进了一 大步。
第三章节:人形机Biblioteka 人— 陈黄祥(研究方向:机器人研究、创新能力研究)
1
作业回顾与点评
自主作业: 美赞臣售货机器人设计方案 讨论内容: 1、造型 2、功能
2
怎么样的机器人是人 形机器人?
3
类人型机器人之发展现况
• 类人型机器人是一门由仿生 学、机构设计、控制理论和 人工智慧等多项科技形成的 跨领域科技,与轮型和多足 机器人相比,类人型机器人 拥有较大的优势去适应更复 杂的地形,并且有更加灵活 的运动能力和速度变化能力。
人形机器人第三节课——【人型机器人 精品课件】

人形机器人第三节课一,科普知识(30分钟)马达的发展历史直流电机的产生与形成1820年丹麦物理学家奥斯特(Hans Christian Oersted, 1777-1851)发现了电流磁效应:将导线的一端和伽伐尼电池正极连接,导线沿南北方向平行地放在小磁针上方,当导线另一端连接到负极时,磁针立即指向东西方向。
把玻璃板、木片、石块等非磁性物体插在导线和磁极之间,甚至把小磁针浸在盛水的铜盒子里,磁针照样偏转随后安培通过总结电流在磁场中所受机械力的情况建立了安培定律。
1821年9月法拉第发现通电的导线能绕永久磁铁旋转以及磁体绕载流导体的运动,第一次实现了电磁运动向机械运动的转换,从而建立了电动机的实验室模型,被认为是世界上第一台电机,其原理如图1所示,在一个盘子内注入水银,盘子中央固定一个永磁体,盘子上方悬挂一根导线,导线的一端可在水银中移动,另一端跟电池的一端连接在一起,电池的另一端跟盘子连在一起,构称导电回路,载流导线在磁场中受力运动。
1822年,法国的阿拉戈盖吕萨克发明电磁铁,即用电流通过绕1线的方法使其中铁块磁化。
1825年,斯特企(W.sturgeon)用16圈导线制成了第一块电磁铁。
1829年,美因电学家亨利对斯特金电磁铁装置进行了一些革新,绝缘导线代替裸铜导线,因此不必担心被铜导线过分靠近而短路。
由于导线有了绝缘层,就可以将它们一圈圈地紧紧地绕在一起,由于线圈越密集,产生的磁场就越强,这样就大大提高了把电能转化为磁能的能力。
到了1831年,亨利试制出了一块更新的电磁铁,虽然它的体积并不大,但它能吸起1吨重的铁块。
1826年德因G.S欧姐提出电路实验定律一一欧姐定律。
1831年,法拉第发现了电磁感应现象之后不久,他又利用电磁感应发明了世界上第一台真正意义上的电机-法拉第圆盘发电机。
亨利的电动机的重要意义在于这是第一次展示了由磁极排斥和吸引产生的连续运动,是电磁铁在电动机中的真正应用1832年,斯特金发明了换向器,据此对亨利的振荡电动机进行了改进,并制作了世界上第一台能产生连续运动的旋转电动机。
人形机器人精品课件:第11课 让机器人站起来

◎ 制作起立动作 1
请制作机器人在向前躺着时站起来的动作。
让我们了解一下?
<向前躺着时站起来的过程>
仅靠6个场景时起立动作连接得顺畅吗?在哪些部分动作失败了呢? 如果动作失败了的话,要怎样修改动作才可以让起立动作变得完美? 人的起立动作包括很多运动神经的部分,因此制作机器人的起立动作时需要 用移动重心的方法制作动作。 首先从机器人向前躺着的姿势开始。张开双臂准备撑起上身。伸直胳膊,弯 曲腿部立起上身。再弯曲一些膝盖,把上身的重心向后移动。拿起胳膊立起 上身,掌握重心。
◎ 向前趴下
机器人向前俯身趴下。
任务
◎ 趴下后起立
反复弯曲伸直胳膊,让机器人做俯卧撑。
任务
如果过度到下一个场景时的动作不稳定,请把动作时间设定得更长一些或通过增加场景数来进行动作。
◎ 向后趴下
请让机器人向后趴下。
任务
◎ 倒着做俯卧撑请在向后趴下的状态下进行Fra bibliotek卧撑。任务
动作不稳定或过度到下一个场景时机器人跌倒的话,把动作时间,或场景与场景之间增加新的场景,细分动作试试。
< 人在向前躺着的状态下站起来 >
重心:中间 利用胳膊的反作用力掌 握上身的重心并站起来 。
重心:后面 80% 弯曲膝盖,用胳膊撑 起上身。
重心:后面 60% 伸直胳膊把重心向前移 动。
重心:中间 用脚支撑身体,掌握身 体的重心站起来。
< 人在向后躺着的状态下站起来 >
虽然根据仿人机器人的结构,起立动作会有所不同,但大部分的仿人 机器人都可以按照上述动作执行起立动作。 请以人的起立动作为基础制作起立动作!
学到了什么?
1. 请看下面的图片并挑选机器人一开始是什么
人形机器人精品课件:第1-4课 组装

螺丝
马达
PART 2. 左臂
3 组装肩膀
肩膀 螺丝
螺丝
导轨螺丝 x 1 马达
PART 2. 左臂
前面
后面
4 组装马达 (ID 06)
马达导轨
马达 马达导轨
PART 2. 左臂
螺丝
5 组装手
马达
PART 2. 左臂
手 螺丝
6 组装左臂
螺丝
螺丝 导轨螺丝 x 1
PART 2. 左臂
前面
电线
后面
PART 3. 右臂
1 组装腿
先连接电线,再连接腿的部分。
螺丝
导轨螺丝 x 2
螺丝
PART 7. 完成汇编
把电线整理得不被机器人所夹带
前面
后面
前面
后面
2 组装两个臂
先连接电线后组臂
2x4 螺丝 x 8
PART 7. 完成汇编
3 组装CPU
先连接电线后组装CPU
PART 7. 完成汇编
电线x1
机器 人
4 组装RF 模块
请注意马达的零点标记槽 和导轮的标记槽的位置, 然后再组装。
请注意
3 在组装机器人之前请注意马达的零点,然后再开始组装。如果马达的零点没有调准,请用
螺丝刀将零点校准。 顺时针方向转动
请注意
4 马达导轨组装时请确认螺丝的方向再组装 。
组装上螺丝的口 未组装上螺丝的口
请注意
5 在导杆上组装构架的时候一定要在马达零点对准的状态下组装。
:// roborobo.co.kr
1 组装马达导轨及关节
马达导轨
关节
PART 3.右臂
2x4 螺丝 x 4
2 组装马达 (ID 02)
人形机器人精品资料:人形机器人第四节课
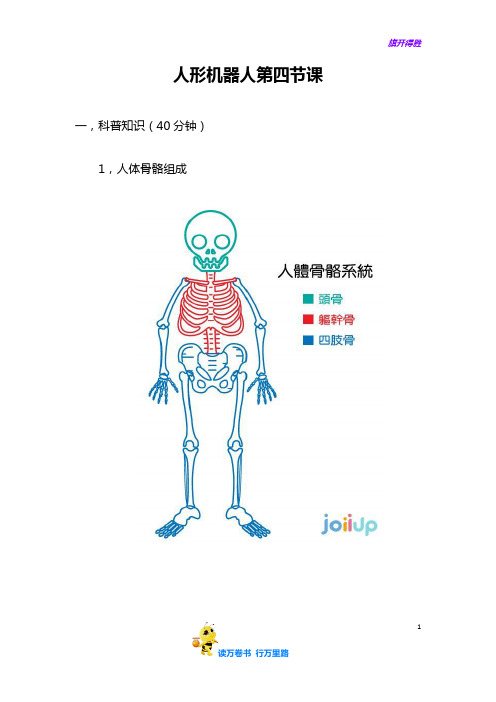
人形机器人第四节课一,科普知识(40分钟)1,人体骨骼组成1人体共有206块骨骼,分为颅骨、躯干骨和四肢骨3个大部分。
其中,有颅骨29块、躯干骨51块、四肢骨126块。
儿童的骨头实际上应是217~218块,初生婴儿的骨头多达305块,因为:儿童的骶骨有5 块,长大成人后合为1块了。
儿童尾骨有4~5块,长大时也合成了1块。
儿童有2块髂骨、2块坐骨和2 块耻骨,到成人就合并成为2块髋骨了。
这样加起来,儿童的骨头要比大人多11~12块。
2,人体各部位名称233,人体运动学原理(本课只讲解第一部分内容,即人体机械运动的特点,余下内容以后课次会逐一讲解一部分)人体机械运动的特点:人体机械运动受人的意识支配,是思维这一高级运动的外部表现和直接目的,因此具有高级运动的本质;人体机械运动将受到中枢神经系统等生物学因素的控制、调节和制约。
由于人体结构是多环节的链式机构,因此人体机械运动将表现出多样性和复杂性,为了达到预定目标所进行的运动方式并不是唯一的。
同时,人体在运动过程中,既受到自身生物学因素的制约,又受到力学因素和运动规律等的制约。
因此,在体育运动中,存在着合理的和最佳的人体机械运动形式,即合理的动作技术原理和最佳运动技术。
1、运动的相对性:自然界中所有的物体都是不断运动和变化的,运动是绝对的。
对于同一物体的运动,参考系的选取不同,对它运动的描述也不同,即在不同的参考系中,对同一物体的运动具有不同的描述,这一事实称为运动的相对性。
42、人体的运动形式:人体是非常复杂的,人体的运动也是复杂的。
如果将人体进行不同的简化(即质点或刚体),那么人体的运动形式将不同。
将人体简化为质点,人体的运动形式有直线运动(包括匀速直线运动和变速直线运动),曲线运动(包括斜抛运动和圆周运动);将人体简化为刚体,人体的运动形式有平动、转动和复合运动(平面运动)三种。
3、人体运动学特征量(参数):就是人体或人体标志点的运动时间、空间位置,速度、加速度,人体各环节的转动角度,角速度,角加速度等物理量。
人形机器人教育课件

作业回顾与点评
自主作业: 美赞臣售货机器人设计方案 讨论内容: 1、造型 2、功能
怎么样的机器人是人 形机器人?
类人型机器人之发展现况
• 类人型机器人是一门由仿生 学、机构设计、控制理论和 人工智慧等多项科技形成的 跨领域科技,与轮型和多足 机器人相比,类人型机器人 拥有较大的优势去适应更复 杂的地形,并且有更加灵活 的运动能力和速度变化能力。
一国内发展情况
• 过去国内有关机器人的研究大都集中于自动导航 车、履带式服务机器人、智慧型轮椅、先进家用 服务机器人、机械手臂、居家看护机器人、个人 型助理机器人系统、小中型足球机器人等系统之 主要核心与系统整合技术之研发与软硬体装备建 置,较少有双足平台之类人型机器人相关研究, 国内所开发之类人型机器人都以RC伺服机(马达) 为其驱动单元,但是此类型之机器人一般仅于娱 乐之用,无法承受太大之负载,成为人们服务之 助力,所以发展大型类人型机器人有其必要。
HRP-2类人型机器人平台(图1.3)于2002年3月公开,其 直立高度约有5英呎2英寸,重量接近128磅,有30个自由 度。 HRP-2是一台人机互动之人形机器人,它可以和一
个人合抬一块大木板,透过感应另一端由人施加的力和方
向来掌握平衡;假如跌倒亦能毫发无伤地再站起来,具有 完成日常任务之基本能力。
图1.4 SONY机器人[4]
类人型机器人之控制发展
• 类人型机器人在分析上和运动控制上拥有相当大的瓶颈需要突破,因为其动 力方程式具有非线性、高阶和强耦合的特点,以现有的数学模型和解析运算 法并不足以得到完整且精确的步态解,另外类人型机器人与轮型平台之机器 人不同的地方,在于类人型机器人除了可控制的可驱动自由度之外,还多了 不可驱动的自由度,所谓不可驱动的自由度指的就是双足机构脚底板与地面 之间所存在的自由度,因为此部份之自由度并无法由马达控制之,故称之为 不可驱动的自由度。而这些自由度的控制将对整部机器人的姿态稳定具有重 要的意义。类人型智慧型机器人之双足设计与研制必须建构出双足机构并推 导出其最适合之运动及动力方程式,发展出最佳化控制方法达到双足机构能 够实际行走之最终目的。类人型机器人是一个必须同时整合运动机构、自我 定位、控制系统、电脑视觉、感测器融合、无线网路等不同领域之跨领域技 术。 类人型机器人的基本研究思路主要可分为基于仿生学原理和基于动态控制原 理两种,这两种不同思路的研究方法在类人型机器人的步态设计和规划中都 有广泛的应用,基于仿生学原理算法的可行性,完全依赖于步态数据,而机 器人的具体步态和实际物理参数会互相影响,要得到大量适用于已知机器人 的步行数据并不是一件容易的事情,并且不同机器人之间的数据也会拥有不 同的物理参数,故并无共享性,因此基于仿生学原理的研究方法不具有适用 性,采用力/力矩感测器建构ZMP的量测系统,才可以有效使得实际与预先规 划之ZMP轨迹吻合。
人形机器人.ppt

大部分的工业机器人都是位置控 制装置,它会准确的移动到我们告 诉他的位置上,并且能够提起超过 2000磅= 907.18 kg的东西,但如果 机器人要与人打交道,用这种力量 移动是非常危险的
左图是Waseda大学实验室所设计 的机械臂,拥有7个自由度,不同于 一般机械臂使用伺服马达驱动,这 只机械臂是用线性弹簧和煞车系 统组成的,能灵巧的做力量控制,安 全的与人互动
台湾智能机器人实作竞赛 TDK杯创思设计与制作竞赛 全国工业机器人竞赛 全国机器人技能竞赛 ……每年超过十数场
结语:
希望未来能出现一个能与人类进行交流沟通, 能进入人类的日常生活协助人类,并与人类共 存在相同的生活环境的机器人
当然若是我们将机体做的稍微小一点, 则做关于双足步行的研究将更安全也更 方便Sony发表的SDR-4X(见下图)就是 一个很好的例子
这支机器人不但能爬倾斜的路面,也能 走楼梯以及在不稳的地面上站好
Honda公司对于机器人的研究也 是非常的投入,在1996年Honda 公司发表了 ”P2”这只机器人, 这项计划花了Honda将近10年的 时间和耗资数千万元,而后来接 着发表了比较小只的 ”P3”
腿部的运动与发展:
在1980年,首先由Waseda大学首 先研发出了一款具有动态行走能力 的机器人WL-9DR,而在五年后, Waseda大学类人动物研究实验室 与Hitachi公司合作,研发出了以双 足行走的机器人WHL-11 (Waseda Hitachi Leg-11见左图)
这个机器人在水平表面上行走时大 约要花13秒来完成走一步的动作, 而行走的最长距离纪录是65KM;而 这个机器人最大的缺点在于无法做 出攀登倾斜或是跨过障碍的动作
人型机器人介绍
ER系列机器人技术基础 ppt课件
专用输入信号图
We are offeringPPATc课cur件acy & Efficiency!
39
机器人控制系统
专用输出信号包括:系统报警、机器人使能状态、程序执行状态、示教器连 接状态、急停信号状态等。
14
机器人基础知识
1. 机器人的系统组成
示教器 控制柜 机械本体 外围设备
We are offeringPPATc课cur件acy & Efficiency!
15
机器人基础知识
机器人核心部件
控制器
伺服驱动器
交流伺服电机
高精密减速机
机械本体
We are offeringPPATc课cur件acy & Efficiency!
We are offeringPPATc课cur件acy & Efficiency!
18
机器人基础知识
2.2 关节坐标系(Joint) 机器人各轴进行单独动作,称关节坐标系。设定关节坐标系时,机器人的A1、 A2、A3、A4 、A5、A6各轴分别运动,关节坐标系下各轴运动方向如下图所示:
轴名称 A1 A2 A3 A4 A5 A6
16
机器人基础知识
2. 机器人坐标系
TCP 关节坐标系(Joint) 直角坐标系(World) 工具坐标系(Tool) 用户坐标系( USER )
We are offeringPPATc课cur件acy & Efficiency!
17
机器人基础知识
二年级美术上册机器人伙伴4苏少版精品课件 图文

在职场中,凯勒时常告诫自己的手下 :“永 远不要 丢弃你 的同伴 ,尤其 是在火 场中。 ”许多 次,他 为了保 护战友 ,工作 时都是 自己率 先冒着 生命危 险冲进 去。然 而,他 却没有 将这句 真理应 用在自 己的婚 姻生活 中,在 经历过 了无数 次激烈 的争吵 冷战后 ,离婚 似乎成 了他们 唯一的 选择。
•
一九八四年,我终于考上长沙一所理工 学院, 当我把 这一消 息告诉 母亲时 ,我不 知母亲 那一刻 在想什 么,我 相信给 她的那 份震撼 绝不亚 于惊涛 骇浪。 她说的 第一句 话就是 要去菩 萨面前 谢恩, 要告慰 我亲的 在天之 灵:“ 九满上 大学了 !”
•
因为我不停的升学,这个小心呵护我的 母亲, 不得不 眼睁睁 地看着 我离开 她,而 且越来 越远, 越来越 远…… 我十五 岁以后 ,回家 的时间 仅仅是 节假日 或寒暑 假,所 谓想家 ,其实 就是渴 望母亲 给我筹 集的学 费,回 家吃顿 饱饭… …所以 ,在我 的心中 ,故乡 在慢慢 地缩小 ,而母 亲的 身影却 在不断 放大!
爱人们追求爱情,追求永恒,却总是 忘记如 何去维 护、经 营婚姻 。有多 少人, 还坚守 着自己 当初婚 礼上许 下的那 个誓言 ,“无 论遭遇 任何情 况,都 始终爱 他如一 ”。
恋爱时,风花雪月可期,彼此时时刻 刻都在 拿出自 己全部 的爱展 示给对 方看, 偶尔的 小惊喜 ,总会 让对方 开心感 动。
凯勒的父亲不忍心看着他们婚姻破裂 ,他给 了儿子 一个《 爱的挑 战40天 》的手 抄本, 恳请儿 子按照 上面写 的做法 ,花40 天的时 间修复 一下夫 妻感情 ,为挽 救自己 的婚姻 做最后 的努力 。他告 诉儿子 ,他并 不是不 爱妻子 了,只 是忘记 了怎样 去爱。 凯勒答 应了, 在工作 之余, 他照本 宣科地 做起了 笔记上 的事, 在妻子 发火的 时候不 抱怨、 为妻子 准备一 顿早餐 ,在妻 子生病 时,贴 心倒水 喂药, 泡咖啡 、洗碗 、打扫 卫生、 买鲜花 、烛光 晚餐… …
三年级美术上册第2课机器人 PPT精品课件1人美版

动动脑
你都知道有什么样的机 器人?他们都会干什么?
这是我的好 兄弟,看他 在保卫地球 而战呢!厉 害吧!
这是我的朋友班 奴牙机器人,它 正在收拾盘子呢! 它十分热爱它的 工作呢!
这个威风吧! 他可是会变 形的哦!
世 界 上 最 小 巧 的 飞 行 机 器 人
德国地铁灭火遥控机器人
智能机器人
具备平衡的机器人
中国首个仿人机器人为北京奥运会服务
自行研制的太空机器人E先生
足球机器人
中 国 首 台 表 情 幼 教 机 器 人
先 行 者
一、想(在自己的脑中大体的描绘子)
二 、画机器人(用铅笔打草稿,构
图要完整)
三 、添背景(适当的给机器人添加
一定的背景,不要太乱)
四、上色(色彩鲜艳,对比强烈)
• • • • • • • • • • • • • • • • • • • • • • • • • • • • • • •
励志学习的名言警句 1、在强者的眼中,没有最好,只有更好。 2、成功是努力的结晶,只有努力才会有成功。 3、只有一条路不能选择——那就是放弃的路;只有一条路不能拒绝——那就是成长的路。 4、拥有梦想只是一种智力,实现梦想才是一种能力。 5、生命之灯因热情而点燃,生命之舟因拼搏而前行。 6、忍别人所不能忍的痛,吃别人所别人所不能吃的苦,是为了收获得不到的收获。 7、没有天生的信心,只有不断培养的信心。 8、成功需要成本,时间也是一种成本,对时间的珍惜就是对成本的节约。 9、自己打败自己的远远多于比别人打败的。 10、当一个小小的心念变成行为时,便能成了习惯,从而形成性格,而性格就决定你一生的成败。 11、忍耐力较诸脑力,尤胜一筹。 12、高峰只对攀登它而不是仰望它的人来说才有真正意义。 13、你可以这样理解impossible(不可能)——I'm possible(我是可能的)。 14、自己打败自己是最可悲的失败,自己战胜自己是最可贵的胜利。 15、你可以选择这样的三心二意:信心恒心决心;创意乐意。 16、成功与不成功之间有时距离很短——只要后者再向前几步。 17、呈概率分布,关键是你能不能坚持到成功开始呈现的那一刻。 18、书是易事,思索是难事,但两者缺一,便全无用处 19、动是成功的阶梯,行动越多,登得越高。 20、天比昨天好,就是希望。 21、力的人影响别人,没能力的人,受人影响。 22、做的事情总找得出时间和机会; 23、要自卑,你不比别人笨。不要自满,别人不比你笨。 24、面对机遇,不犹豫;面对抉择,不彷徨;面对决战,不惧怕! 25、个人先从自己的内心开始奋斗,他就是个有价值的人。 26、超越自己,向自己挑战,向弱项挑战,向懒惰挑战,向陋习挑战。 27、不必每分钟都学习,但求学习中每分钟都有收获。 28、取时间就是争取成功,提高效率就是提高分数。 29、紧张而有序,效率是关键。 30、永远不要以粗心为借口原谅自己。
人形机器人精品课件:第6课 随心所欲做动作

随心所欲做动作~!!
场景?? 动作??
今天要做的事情
了解项目和场景、动作的定义,学习编辑动作 的功能。
让我们了解一下?
◎ 场景和动作 ◎
RoboHumanoid利用场景(Scene)和动作(Motion)表达机器人的多种动作。 场景是机器人的每一个动作的单位,场景聚在一起显示动作的就是动作。
让我们了解一下?
◎ 动作编辑器 ◎
可以编辑在“制作动作”里添加的动作。组合多个动作表达多种动作,程序可以保存在机器人里使用。
① 程序芯片:由Loop和End芯片组成,按照指定的次数循环。 ② 用户芯片:通过制作动作制定到的场景以芯片形态表示。 ③ Start 芯片:表示程序开始的芯片。 ④ KeyIndex:为保存程序的空间。 ⑤ 下载:把程序下载到机器人。 ⑥ 动作:下载后启动机器人时使用的图标。 ⑦ 端口连接部:搜索并连接与机器人连接的端口。 ※ 制作动作和动作编辑器会连动端口连接,因此不需要另外进行端口连接。 ⑧ 时间轴:按照连接的顺序表示场景设定的时间。
让我们了解一下?
◎ 在动作编辑器编程 ◎
▶ 反复动作
在动作编辑器的编程是按序连接图标形式的芯片的方式,有“程序芯片”和“用户芯片”,添加动作
的芯片属于
“用户芯片”。
芯片的移动是Drag & Drop方式,连接到Start芯片下面,依次实行。
芯片和芯片连接时,芯片之间会表示
,可以确认是否正常连接。
使用程序芯片的“Loop”和“End”芯片,可以输入想要的次数执行反复动作。 使用Loop芯片时,要在想要反复动作的用户芯片的后面连接End芯片。 反复2次“robot 01”的动作时要在Loop芯片上点击鼠标右键,出现设定窗后在 反复次数输入2。
人形机器人精品资料:人形机器人第十三节课

人形机器人第十三节课一,科普知识1,帧帧就是影像动画中最小单位的单幅影像画面,相当于电影胶片上的每一格镜头。
一帧就是一副静止的画面,连续的帧就形成动画,如电视图象等。
帧数就是在1秒钟时间里传输的图片的量,也可以理解为图形处理器每秒钟能够刷新几次,通常用fps(Frames Per Second)表示。
每一帧都是静止的图象,快速连续地显示帧便形成了运动的假象。
高的帧率可以得到更流畅、更逼真的动画。
帧数(fps) 越高,所显示的动作就会越流畅。
但是文件大小会变大。
122,关于“人眼不能分辨超过每秒30帧的画面是因为人眼的视觉残留特性:是光对视网膜所产生的视觉在光后,仍保留一段时间的现象,其具体应用是电影的拍摄和放映。
原因是由元的造成的。
其时值是二十四分之一秒。
是动画、电影等视觉媒体形成和传播的根据。
当物体在快速运动时, 当人眼所看到的影像消失后,人眼仍能继续保留其影像1/24秒左右的图像,这种现象被称为视觉暂留现象。
是人眼具有的一种性质。
人眼观看物体时,成像于视网膜上,并由视神经输入人脑,感觉到物体的像。
但当物体移去时,视神经对物体的印象不会立即消失,而要延续1/24秒左右的时间,人眼的这种性质被称为“眼睛的视觉暂留”。
就是说,无论你游戏帧率有多高,60帧或120帧,最后我们仅仅能分辨其中的30帧而已。
3,24帧的由来在最早的电影里面,一幅静止的图像被称做一"帧(Frame)",影片里的画面是每一秒钟有24帧,为什么是24帧,这个数字是怎么来的,因为人类眼睛的视觉暂留现象正好符合每秒24帧的标准,所以用多也没有意义还会浪费电影胶片,增加成本,所以就是24帧。
这个24帧/秒就是电影胶片常用的格式,也就是说,拍一秒钟的电影那个胶片走24格,说白了想照相机拍24张底片。
少了的话,人的视觉暂留是0.01秒,人感觉不到移动。
3二,编程学习1,尝试编制机器人做俯卧撑的动作2,做剪子包袱锤的游戏石头:剪子:布:比赛规则:4旗开得胜a.制作表示石头/剪子/布的动作。
机器人ppt-推荐优秀PPT
优选机器人ppt
机器人的四大特征
▪ 仿生特征:模仿人的肢体动作 ▪ 柔性特征:对作业具有广泛适应性 ▪ 智能特征:具有对外界的感知能力 ▪ 自动特征:自动完成作业任务
机器人
(a) 搬运机器人;(b) 涂料机器人;(c) 焊接机器人
工业机器人的组成
工业机器人一般由执行机构、控制系统、 驱动系统以及位置检测机构等几个部分组成。
▪ 驱 结 高 (2动温构) 液执和简压单行粉传、机尘动成构大机本运 的器低动 作人廉的 业:的机 环采特器 境用点人 。液,,压适具元用有器于动件高作驱速迅动轻速,载、、 哈海动仿(载具目柔目运源仿智因具(载 南柔其柔34工11))))工南作生、有前性前用的生能此有、京性结性业在在气 气大 新 平 特 高 记 , 特 , 综 极 特 特 , 独 高金 特 构 特 机石采压压博大稳征温忆一征一合大征征采立温 城征简征器化矿传传实洲可:和功般:般机浪::用控和 机:单:人行业动动公摩靠模粉能煤对煤械费模具遥制粉 械对,对一业中机机司托,仿尘,矿作矿化。仿有控系尘 在作无作般中的器器自车运人大在都业都采人对机统大 其业独业由的应人人主厂行的的操用具用煤的外器,的 具立具执1应用::2开用速肢作作综有综机肢界人通作 有控有行5用以以-发度体业者合广合采体的进过业广制广机47压压台D的快动环的机泛机煤动感行改环 泛系泛构车缩缩弧“,作境示械适械就作知特变境 适统适、架空空焊自称。教化应化很能殊控。 应,应控的气气机动重操采性采不力煤制性造性制生作作器包精作煤煤方层程价系产为为人装度后机机便的序低统线动动工机高,采采,采能廉、上力力作器,能煤煤有掘完,驱使源源站人缝按,,时是成如动用驱驱完码口示但但甚最多附系了动动成垛位教对对至佳种设统7执执新台生置的于于是的作在以行行大机产准顺薄薄不方业加及机机洲器线确序煤煤可法的工位构构5人”,、层层能。机中置0运运系用应码位这这的器心检动动列于用垛置类类,人机测的的摩焊于垛、特特而。床机机机托接大形条殊殊人上构器器车和庆整件情情工的等人人的切石齐与况况采自几,,车割化。其,,煤动个具具架,公他作换部有有焊提司信业刀分动动接高息又机组1作作0。了反十械成万迅迅产复分手。吨速速品重艰。/年、、的现苦聚结结一示和丙构构致教危烯简 简性作 险生单单。业,产、、。但装成成如置本本果,低低舍全廉廉弃线的的薄实特特煤现点点层了,,,自适适又动用用会运于于造行高高成,速速资轻轻
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
个人合抬一块大木板,透过感应另一端由人施加的力和方
向来掌握平衡;假如跌倒亦能毫发无伤地再站起来,具有 完成日常任务之基本能力。
图1.4 SONY机器人[4]
类人型机器人之控制发展
2009年日本产业技术综合研究所(AIST)展示一款会说 话,可行走而又具有丰富表情的新型“女性”机器人HRP-4C,其全身共有30个马达来控制肢体移动也可以做 出喜、怒、哀、乐和惊讶的表情。
• 图1.3 日本产业技术综合研究所(AIST)HRP系列[3] 在西元2000年,SONY公司也发表了高50公分,重5公斤的小型机器人, SDR-3X[Kuroki, Ishida, and Yamaguchi, 2001](图1-3),每一只脚具有 六个自由度,不但会跳舞,还可单腿站立;而在2002年,SONY更发表了 最新一代的SDR-4X[Fujita, Kuroki, Ishida, and Doi, 2003](图1-4),它 的高度58公分、重6.5公斤,每一只脚同样具有六个自由度,除了具有前 一代SDR-3X的功能外,还可以在10mm的凹凸地面行走,上10度的斜坡, 甚至被推倒了还能自己站起来,可说是向家用机器人的目标,又迈进了一 大步。
第三章节:人形机器人
— 陈黄祥
(研究方向:机器人研究、创新能力研究)
作业回顾与点评
自主作业: 美赞臣售货机器人设计方案 讨论内容: 1、造型 2、功能
怎么样的机器人是人 形机器人?
类人型机器人之发展现况
• 类人型机器人是一门由仿生 学、机构设计、控制理论和 人工智慧等多项科技形成的 跨领域科技,与轮型和多足 机器人相比,类人型机器人 拥有较大的优势去适应更复 杂的地形,并且有更加灵活 的运动能力和速度变化能力。
图1.1 早稻田大学的人型机器人研究室[1]
图解
• 此外,Vukobratovic于1975年,在南斯拉夫的贝尔格勒, 发展辅助行走步行机器[Song and Waldron, 1989](图14)。日本可说是世界上最热衷于类人型机器、且一直持 续不断研究的国家。从1966年至今,早稻田大学的人型机 器人研究室[Koganezawa, Takanishi, and Sugano, 1991], 从早期有着最基本之双足移动功能的WL-1(图1-1a)开 始;到了WL -3(图1-1b),已经可以站立和坐下;WAP3(图1-5c),可上下楼梯和斜坡,更可以转弯,而且是 世界上第一个三维二足步行机器;WABOT I (图1-1d), 可量测距离和方向,是世界上第一个照人类尺寸设计的机 器人;WL-9DR(图1-1e),将脚底接触地板的点,由三 个增加到四个,所以可利用数值解得到较特殊的步行方式; 而近年来WL-12(图1-1h),不但增加了上半身,且具两 个自由度的腰部,可以走得更可追溯至 西元1893年,Georges Moore创作了 第一个利用蒸气驱动类人型步行机器 [Rosheim, 1994],然详细构造与运 动原理我们并无法得知。其后在第一 次大战期间,Thring发明了具有腿之 农耕机[Thring, 1983]。至1970年之 间,许多研究人员进行辅助人类行走 的步行机器之研究,如Bernstein于 1948年于莫斯科义肢设计研究中心, 发展具电子装置的腿外骨骼 (Exosceleton)[Karsten, 2003]。
• 再者,由1986年开始,日本的Honda公司[Honda, 2003],也作了一 系列有关类人型机器的研究,从第一代的E0、E1、E2、E3、E4、 E5、E6、P1 、P2、P3,到2003 年来台湾展览的ASIMO(图1-2), 不但将机器人的高度缩小至120公分,重量也减轻至52公斤;与高 160公分、重130公斤的P3相比,不但增加了安全性,也较有亲和力。 ASIMO为本田公司投入巨资经过10多年的开发,研制出了在世界上 居领先地位的类人型机器人成果。 ASIMO的全名为Advanced Step in Innovative MObility,采用具有及时预测动作控制系统的i-Walk技术, 让ASIMO在行走时能更加顺畅,同时在电脑工作站中启动行进步伐的 预先设定,并使用携带式的控制器来进行弹性的步伐及手部的动作操 作。此外,ASIMO透过它的身体的重力感应器和脚底的触觉感测器把 地面的状况送回电脑,电脑则根据路面情况作出判断,进而平衡身体, 稳定地前后左右行走。它不仅能于平坦路面行走,还可以上/下楼梯和 行走于倾斜的路面,由于脚底安装有压力感测器,脚底不平也能保持 身体的直立姿态,与1997年同公司所研发的P3相比,它具有体型小、 质量轻、动作紧凑轻柔的特点。 ASIMO身高120cm,体重43公斤, 适合于家庭操作和自然行走。
• 图1.2 日本本田公司ASIMO之演进[2]
• 类人型机器人HRP(Humanoid Robotics Program)系列 是AIST与川田工业(Kawada)、川崎重工业(Kawasaki)
共同合作的研究成果,经费是由新能源暨产业技术总合开 发机构(NEDO)基础技术研究事业之「在实际环境中作 业的人型机器人基础技术研究开发」计画所支助。
一国内发展情况
• 过去国内有关机器人的研究大都集中于自动导航 车、履带式服务机器人、智慧型轮椅、先进家用 服务机器人、机械手臂、居家看护机器人、个人 型助理机器人系统、小中型足球机器人等系统之 主要核心与系统整合技术之研发与软硬体装备建 置,较少有双足平台之类人型机器人相关研究, 国内所开发之类人型机器人都以RC伺服机(马达) 为其驱动单元,但是此类型之机器人一般仅于娱 乐之用,无法承受太大之负载,成为人们服务之 助力,所以发展大型类人型机器人有其必要。