阻尼振动与受迫振动 实验报告
东南大学物理实验报告-受迫振动

物理实验报告标题:受迫振动的研究实验摘要:振动是自然界中最常见的运动形式之一,由受迫振动引发的共振现象在日常生活和工程技术中极为普遍。
共振现象在许多领域有着广泛的应用,例如,众多电声器件需要利用共振原理设计制作。
它既有实用价值,也有破坏作用。
本实验采用玻耳共振仪定量测定了阻尼振动的振幅比值,绘制了受迫振动的幅频特性和相频特性曲线,并分析了阻尼对振动的影响以及受迫振动的幅频特性和相频特性。
另外,实验中利用了频闪法来测定动态的相位差。
目录1引言 (3)2.实验方法 (3)2.1实验原理 (3)2.1.1受迫振动 (3)2.1.2共振 (4)2.1.3阻尼系数δ的测量 (5)2.2实验仪器 (6)3实验内容、结果与讨论 (7)3.1测定电磁阻尼为0情况下摆轮的振幅与振动周期的对应关系 (7)3.2研究摆轮的阻尼振动 (8)3.3测定摆轮受迫振动的幅频与相频特性曲线,并求阻尼系数δ (9)3.4比较不同阻尼的幅频与相频特性曲线 (13)4.总结 (15)5.参考文献 (15)1引言振动是自然界中最常见的运动形式之一,由受迫振动引发的共振现象在日常生活和工程技术中极为普遍。
共振现象在许多领域有着广泛的应用,例如为研究物质的微观结构,常采用核共振方法。
但是共振现象也有极大的破坏性,减震和防震是工程技术和科学研究的一项重要任务。
表征受迫振动性质的是受迫振动的振幅—频率特性和相位—频率特性(简称幅频和相频特性)。
本实验采用玻耳共振仪定量测定了阻尼振动的振幅比值,绘制了受迫振动的幅频特性和相频特性曲线,并分析了阻尼对振动的影响以及受迫振动的幅频特性和相频特性。
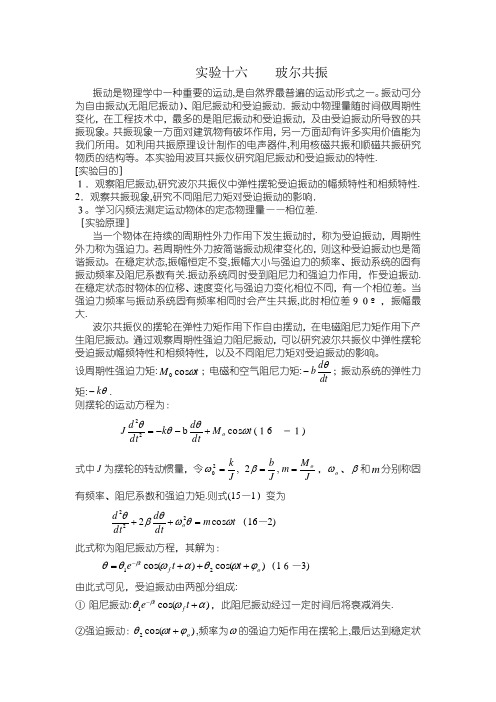
2.实验方法2.1实验原理2.1.1受迫振动本实验中采用的是玻耳共振仪,其构造如图1所示:图一铜质圆形摆轮系统作受迫振动时它受到三种力的作用:蜗卷弹簧B提供的弹性力矩−kθ,轴承、空气和电磁阻尼力矩−b dθdt,电动机偏心系统经卷簧的外夹持端提供的驱动力矩M=M0cosωt。
受迫振动共振实验报告
一、实验目的1. 了解受迫振动的基本原理和共振现象。
2. 通过实验验证受迫振动共振的条件,并观察共振现象。
3. 研究不同频率、阻尼和激励力对受迫振动共振的影响。
4. 掌握实验数据采集和分析方法,提高实验技能。
二、实验原理受迫振动是指在外力作用下,物体发生的振动现象。
当外力的频率与物体的固有频率相同时,会发生共振现象,此时物体的振幅达到最大值。
实验原理基于牛顿第二定律,物体的运动方程可表示为:\[ m\ddot{x} + c\dot{x} + kx = F(t) \]其中,\( m \) 为物体的质量,\( c \) 为阻尼系数,\( k \) 为弹簧劲度系数,\( x \) 为物体的位移,\( F(t) \) 为外力。
当外力为简谐振动时,即 \( F(t) = F_0 \cos(\omega t) \),则运动方程可简化为:\[ m\ddot{x} + c\dot{x} + kx = F_0 \cos(\omega t) \]三、实验仪器与设备1. 波尔共振仪2. 信号发生器3. 数字示波器4. 阻尼器5. 连接线四、实验步骤1. 将波尔共振仪的摆轮与阻尼器连接,并调整阻尼器,使摆轮处于自由振动状态。
2. 打开信号发生器,设置合适的频率和幅度,产生简谐振动信号。
3. 将信号发生器的输出信号连接到波尔共振仪的输入端,开始实验。
4. 使用数字示波器观察波尔共振仪的振动信号,记录振幅和频率。
5. 调整信号发生器的频率,观察共振现象,记录共振频率和振幅。
6. 改变阻尼器的阻尼系数,观察阻尼对共振现象的影响。
7. 改变激励力的幅度,观察激励力对共振现象的影响。
五、实验结果与分析1. 实验结果表明,当信号发生器的频率与波尔共振仪的固有频率相同时,发生共振现象,振幅达到最大值。
2. 随着阻尼系数的增加,共振频率逐渐降低,振幅逐渐减小。
3. 随着激励力幅度的增加,共振现象更加明显,振幅达到最大值。
六、实验结论1. 受迫振动共振现象是当外力频率与物体的固有频率相同时,物体振幅达到最大值的现象。
阻尼振动和受迫振动实验报告

清华大学实验报告工程物理系工物40 钱心怡 2014011775实验日期:2015年3月3日一.实验名称阻尼振动和受迫振动 二.实验目的1.观测阻尼振动,学习测量振动系统参数的基本方法2.研究受迫振动的频幅特性和相频特性,观察共振现象3.观察不同阻尼对振动的影响 三.实验原理 1.阻尼振动在转动系统中,设其无阻尼时的固有角频率为ω0,并定义阻尼系数β其转动的角度与时间的关系满足如下方程d d d dd d +dd dd dd+d d dd =d 解上述方程可得当系统处于弱阻尼状态下时,即β<ω0时,θ和t 满足如下关系θ(t )=θi exp (−βt)cos (√ω02−β2t +∅i )解得阻尼振动角频率为ωd =√ω02−β2,阻尼振动周期为T d =√ω02−β2同时可知ln θ和t 成线性关系,只要能通过实验数据得到二者之间线性关系的系数,就可以进一步解得阻尼系数和阻尼比。
2.周期性外力作用下的受迫振动当存在周期性外力作用时,振动系统满足方程J d 2θdt2+γd θdt +k θ=M ωtθ和t 满足如下关系:θ(t )=θi exp (−βt )cos (√ω02−β2t +ϕi )+θm cos (ωt −ϕ)该式中的第一项随着时间t 的增大逐渐趋于0,因此经过足够长时间后,系统在外力作用下达到平衡,第一项等于0,在该稳定状态下,系统的θ和t 满足关系:θ(t )=θm cos (ωt −ϕ) 其中θm =MJ√(ω02−ω2)+4β2ω2 ;ϕ=arctan2βωω02−ω2(θ∈(0,π))3.电机运动时的受迫振动当波尔共振仪的长杆和连杆的长度远大于偏心轮半径时,当偏心轮电机匀速转动时,设其角速度为ω,此时弹簧的支座是弹簧受迫振动的外激励源,摆轮转角满足以下方程:J d 2θdt2+γd θdt +k (θ−αm cos ωt )=0即为 Jd 2θdt 2+γd θdt+k θ=k αm cos ωt与受周期性外力矩时的运动方程相同,即有θ(t )=θi exp (−βt )cos (√ω02−β2t +ϕi )+θm cos (ωt −ϕ)θm =αω02√(ω02−ω2)2+4β2ω2=α√(1−(ωω0)2)2+4ζ2(ωω0)2ϕ=arctan2βωω2−ω2=arctan2ζ(ωω0)1−(ωω0)可知,当ω=ω0时φ最大为π2,此时系统处于共振状态。
阻尼振动与受迫振动

,可以推出������0 =
2������ ������������ 1−������
2
= ,是阻尼振动振幅衰减到原来 ������−1 需要
,是系统共振锐度或频率选择性的量度。
������������ ������
6. 对数缩减率Λ =
=
2������������ 1−������ 2
,定义为衰减阻尼振动中相邻两
������ ������ 0 ������ 、 ������
=
������ 2 ������������ 2������
2 ������2 0 −������
3. 阻尼振动周期������������ = 4. 时间常数������ = 的时间。 5. 品质因素������ ≡
1 2������ 2������ ������ 1 ������
2 小阻尼(������ 2 − ������0 < 0)时,阻尼振动运动方程的解为 2
������ ������ = ������������ exp −������������ cos
2 ������0 − ������ 2 ������ + ������������ 2
由 上 式 可 知 , 阻 尼 振 动 角 频 率 ������������ = ������2 0 − ������ , 而 周 期 为 ������������ =
[2]
即 ������ 2 ������ ������������ ������ 2 + ������ + ������������ = ������������������ cos ������������ ������������ ������������ 它和弹簧支座固定、摆轮受周期外力矩������������������ cos ������������作用时运动 方程在形式上完全一致,等效外激励力矩的振幅为������������������ ,则对 应的稳态解振幅和相位差分别为 ������������ = ������������ ������2 0
阻尼振动和受迫振动实验报告

清华大学实验报告工程物理系工物40 钱心怡 2014011775实验日期:2015年3月3日一.实验名称阻尼振动和受迫振动二.实验目的1.观测阻尼振动,学习测量振动系统参数的基本方法2.研究受迫振动的频幅特性和相频特性,观察共振现象3.观察不同阻尼对振动的影响三.实验原理1.阻尼振动在转动系统中,设其无阻尼时的固有角频率为ω0,并定义阻尼系数β其转动的角度与时间的关系满足如下方程d2θdt2+2βdθdt+ω02θ=0解上述方程可得当系统处于弱阻尼状态下时,即β<ω0时,θ和t满足如下关系θ(t)=θi exp(−βt)cos(√ω02−β2t+∅i)解得阻尼振动角频率为ωd=√ω02−β2,阻尼振动周期为T d=√ω02−β2同时可知lnθ和t成线性关系,只要能通过实验数据得到二者之间线性关系的系数,就可以进一步解得阻尼系数和阻尼比。
2.周期性外力作用下的受迫振动当存在周期性外力作用时,振动系统满足方程 Jd 2θdt +γdθdt+kθ=Mωtθ和t 满足如下关系:θ(t )=θi exp (−βt )cos (√ω02−β2t +ϕi )+θm cos(ωt −ϕ)该式中的第一项随着时间t 的增大逐渐趋于0,因此经过足够长时间后,系统在外力作用下达到平衡,第一项等于0,在该稳定状态下,系统的θ和t 满足关系:θ(t )=θm cos(ωt −ϕ) 其中θm =MJ√(ω02−ω2)+4β2ω2 ;ϕ=arctan2βωω02−ω(θ∈(0,π))3.电机运动时的受迫振动当波尔共振仪的长杆和连杆的长度远大于偏心轮半径时,当偏心轮电机匀速转动时,设其角速度为ω,此时弹簧的支座是弹簧受迫振动的外激励源,摆轮转角满足以下方程:J d 2θdt 2+γdθdt+k (θ−αm cosωt )=0 即为 Jd 2θdt +γdθdt+kθ=kαm cosωt与受周期性外力矩时的运动方程相同,即有θ(t )=θi exp (−βt )cos (√ω02−β2t +ϕi )+θm cos(ωt −ϕ)θm =αω2√(ω02−ω2)+4β2ω2=α√(1−(ωω0)2)2+4ζ2(ωω0)2ϕ=arctan 2βω02=arctan 2ζ(ωω0)1−(ωω0)2可知,当ω=ω0时φ最大为π2,此时系统处于共振状态。
利用波尔共振仪研究受迫振动实验报告

利用波尔共振仪研究受迫振动实验报告一、实验目的1、观察摆轮的自由振动、阻尼振动和受迫振动现象。
2、研究不同阻尼力矩对受迫振动的影响,并测定阻尼系数。
3、研究受迫振动的幅频特性和相频特性,观察共振现象,测定受迫振动的共振频率和共振振幅。
二、实验仪器波尔共振仪,包括振动系统、电磁阻尼系统、电机驱动系统、光电计数系统和智能控制仪等部分。
三、实验原理1、自由振动无阻尼的自由振动方程为:$m\frac{d^2\theta}{dt^2}=k\theta$,其中$m$为摆轮的转动惯量,$k$为扭转弹性系数,$\theta$为角位移。
其解为:$\theta = A\cos(\omega_0 t +\varphi)$,其中$\omega_0 =\sqrt{\frac{k}{m}}$为固有角频率,$A$和$\varphi$为初始条件决定的常数。
2、阻尼振动考虑阻尼时,振动方程为:$m\frac{d^2\theta}{dt^2} +b\frac{d\theta}{dt} + k\theta = 0$,其中$b$为阻尼系数。
根据阻尼的大小,可分为三种情况:小阻尼:$\omega =\sqrt{\omega_0^2 \frac{b^2}{4m^2}}$,振动逐渐衰减。
临界阻尼:振动较快地回到平衡位置。
大阻尼:不产生振动。
3、受迫振动在周期性外力矩$M = M_0\cos\omega t$作用下,振动方程为:$m\frac{d^2\theta}{dt^2} + b\frac{d\theta}{dt} + k\theta =M_0\cos\omega t$。
稳定时,振动的角位移为:$\theta = A\cos(\omega t +\varphi)$,其中振幅$A =\frac{M_0}{\sqrt{(k m\omega^2)^2 +(b\omega)^2}}$,相位差$\varphi =\arctan\frac{b\omega}{k m\omega^2}$。
阻尼振动实验
阻尼振动实验阻尼振动是物体在受到外力作用后产生的振荡现象,其中阻尼力的大小和形式对振动的行为有着重要的影响。
通过进行阻尼振动实验,可以更好地理解振动现象并研究其特性。
本文将介绍关于阻尼振动实验的设备和步骤,并探讨实验结果的分析。
一、实验设备为了进行阻尼振动实验,我们需要以下设备:1. 阻尼振动实验装置:包括弹簧、振动台和负载等。
2. 振动传感器:用于测量物体的振动幅度和频率等参数。
3. 计时器:用于测量振动周期和周期的变化。
二、实验步骤1. 设置实验装置:将弹簧固定在振动台上,确保其垂直并能自由振动。
将负载挂在弹簧下方,用以增加振动的阻尼。
2. 测量振动周期:将振动台拉开一定距离使其振动,并使用计时器测量振动的周期。
多次测量取平均值以提高准确性。
3. 引入阻尼:在一定条件下改变负载的大小,观察振动的行为。
可尝试多组不同负载以获得不同阻尼下的振动数据。
4. 记录振动数据:使用振动传感器测量振动的幅度和频率等参数,并将数据记录下来。
5. 分析数据:根据实验数据绘制振动幅度和频率的图表,并对其进行比较和分析。
三、实验结果分析根据实验数据的分析,我们可以得出以下结论:1. 阻尼力的大小和形式对振动的行为有着显著影响。
负载的增加会导致阻尼力的增加,从而减小振动的幅度和频率。
当负载达到一定值后,振动将完全停止。
2. 随着阻尼力的增加,振动的周期也会变化。
阻尼越大,周期越长。
3. 不同阻尼下的振动行为有所差异。
当阻尼较小时,振动呈现较大的幅度和较高的频率;而当阻尼较大时,振动幅度和频率均减小。
总结:通过阻尼振动实验,我们可以更好地理解物体振动的特性。
实验结果表明阻尼力对振动现象的影响是显著的。
在实际应用中,对于需要控制振动的系统,合理选择和调整阻尼力是十分重要的。
通过综合分析不同阻尼下的振动行为,我们可以更好地优化系统设计,提高其性能和安全性。
附:实验注意事项1. 确保实验装置的稳定性和安全性。
2. 准确测量振动参数,避免误差。
机械振动中的阻尼振动与受迫振动
机械振动中的阻尼振动与受迫振动在机械系统中,振动是一种普遍存在的现象,它包含着阻尼振动和受迫振动两种类型。
阻尼振动是指系统在一定的阻尼作用下运动的周期性减弱振动,而受迫振动是指系统受到外部力的作用而发生周期性振动。
本文将探讨机械振动中的阻尼振动和受迫振动的特点及其应用。
一、阻尼振动阻尼振动是指振动系统在受到阻力的作用下产生的振动。
阻尼力可以分为粘性阻尼、干摩擦阻尼和液体摩擦阻尼等不同形式。
阻尼振动的特点是振幅逐渐减小,振动频率也逐渐减小。
阻尼振动的主要原因是能量的损失。
当机械系统受到阻尼力的作用时,振动系统的机械能会逐渐转化为热能而损失。
这导致振动幅度逐渐减小,最终停止振动。
例如,摆钟在受到空气阻力的影响下,其摆动幅度会逐渐减小,最终停止。
阻尼振动的应用广泛。
在机械工程中,阻尼振动常常被用于减震和能量吸收的装置设计。
例如,在车辆的悬挂系统中使用减震器,可以有效地缓解车辆行驶中的颠簸感。
同时,阻尼振动还常用于物体的减振和抗震设计,例如建筑物中的隔震装置。
二、受迫振动受迫振动是指振动系统在外部力的作用下产生的振动。
外力可以是周期性的,也可以是非周期性的。
受迫振动的特点是振幅和频率与外力的频率相关。
外力对振动系统的影响可以分为共振和强迫两种情况。
共振是指外力的频率接近或等于振动系统的固有频率时,振动幅度会显著增大。
强迫是指外力的频率与振动系统的固有频率有一定的差别,但仍然能引起系统振动。
受迫振动在实际生活中有许多应用。
例如,在音乐中,乐器的共振现象使得乐器能够产生特定的音调。
另外,受迫振动还在工程领域中有着广泛的应用,如振动筛、振动输送机等。
它们利用外力作用产生振动,以完成特定的分选和输送任务。
三、阻尼振动与受迫振动的关系阻尼振动与受迫振动是机械振动中两种常见的振动类型,它们在某些情况下可以相互转化。
当受迫振动系统存在阻尼时,会产生阻尼振动。
此时,外力的频率与振动系统的固有频率相同或接近时,阻尼振动的幅度会受到外力的影响,产生共振效应。
大学物理实验——阻尼振动受迫振动
φ理论
(φ- φ理论)/ φ
不确定度公式
1 Sb I
(D j D )2 (I 1)
4 2 3 b
b3
4 2 4 2 b2
3 2 b
2
2
0 0Td Td1• 2*忽略B类不确定度
注意事项
阻尼振动实验开始有机玻璃盘F的指针对准零刻度线。 阻尼振动时初始摆幅150o-200o为佳。
受迫振动振幅稳定后再读数,读数时再开 闪光灯。
受迫振动:幅频曲线、相频曲线
实验仪器
课后作业
阻尼写振出动完:整求表各达阻式尼。档的b、ζ、ω0和△b、△ζ、△ω0,
受迫振动:以(ω/ω0)为横坐标,先列表计算,用坐
标纸作幅频曲线、相频曲线。(可用Excel做出曲线,打印
上交)
T ω/ω0 θ φ
切记不可在无阻尼档开电机,以防弹簧损坏。 振幅和相位差的测量应在稳定之后进行测量。
一周之内交报告。 做完实验,请将仪器恢复初始状态。
谢谢!
受迫振动
思路: 调节强迫力周期旋钮(受迫振动T取0.9—1.1T0 )
受迫振动稳定
通过显示窗读振幅 借助闪光灯,在有机玻璃盘上读取相位差
(相位差保证在20o —160o )
受迫振动测量
测量14-16个点,分布合理,需包括φ=π/2的 点。作幅频曲线、相频曲线。
阻尼档位的选取与阻尼振动档位(阻尼2-5档 或1-3档)选取一致。
Td
0
阻尼振动的重点是b、ζ、ω0和△b、△ζ、△ω0的计算
b
ln j
ln j1
1 I2
I
(yjI yj )
j 1
b 4 2 b2
阻尼振动测量
无电磁阻尼时(阻尼0档)测50个 θ,5组 10Td, 课堂上用计算器计算b. 课后求ζ、ω0
实验二阻尼和受迫振动
令
,
,
则式(1)变为
(2)
当
时,式(2)即为阻尼振动方程。
当 ,即在无阻尼情况时式(2)变为简谐振动方程,系统的 固有频率为 。方程(2)的通解为
由式(3)可见,受迫振动可分成两部分:
(3)
第一部分, 减消失。
和初始条件有关,经过一定时间后衰
第二部分,说明强迫力矩对摆轮作功,向振动体传送能量,最后 达到一个稳定的振动状态。振幅为
摆轮振幅是利用光电门 H 测出摆轮读数 A 处圈上凹型缺口个数,并在控制 箱液晶显示器上直接显示出此值,精度为 10。
波耳共振仪电器控制箱的前面板和后面板分别如图 1-4 和图 1-5 所示。
电机转速调节旋钮,系带有刻度的十圈电位器,调节此旋钮时可以精确改 变电机转速,即改变强迫力矩的周期。锁定开关处于图 1-6 的位置时,电位器 刻度锁定,要调节大小须将其置于该位置的另一边。×0.1 档旋转一圈,×1 档 走一个字。一般调节刻度仅供实验时作参考,以便大致确定强迫力矩周期值在 多圈电位器上的相应位置。
④ 学生做完实验后测量数据需保存后,才可在主机上查看特性曲线及振 幅比值。
5、关机
在图二状态下,按住复位按钮保持不动,几秒钟后仪器自动复位,此时所做实验数据 全部清除,然后按下电源按钮,结束实验。
ZKY-BG 型波尔共振仪由振动仪与电器控制箱两部分组成。振动仪部分如图 1-3 所示,铜质圆形 摆轮 A 安装在机架上,弹簧 B 的一端与摆轮 A 的轴相联, 另一端可固定在机架支柱上,在弹簧弹性力的作用下,摆轮可绕轴自由往复摆 动。在摆轮的外围有一卷槽型缺口,其中一个长形凹槽 C 比其它凹槽长出许多。 机架上对准长型缺口处有一个光电门 H,它与电器控制箱相联接,用来测量摆轮 的振幅角度值和摆轮的振动周期。在机架下方有一对带有铁芯的线圈 K,摆轮 A 恰巧嵌在铁芯的空隙,当线圈中通过直流电流后,摆轮受到一个电磁阻尼力的 作用。改变电流的大小即可使阻尼大小相应变化。为使摆轮 A 作受迫振动,在 电动机轴上装有偏心轮,通过连杆机构 E 带动摆轮,在电动机轴上装有带刻线 的有机玻璃转盘 F,它随电机一起转动。由它可以从角度读数盘 G 读出相位差Φ。 调节控制箱上的十圈电机转速调节旋钮,可以精确改变加于电机上的电压,使 电机的转速在实验范围(30-45 转/分)内连续可调,由于电路中采用特殊稳速 装置、电动机采用惯性很小的带有测速发电机的特种电机,所以转速极为稳定。 电机的有机玻璃转盘 F 上装有两个挡光片。在角度读数盘 G 中央上方 900 处也有 光电门 I(强迫力矩信号),并与控制箱相连,以测量强迫力矩的周期。
大学物理实验报告——受迫振动的研究
受迫振动的研究摘要: 振动是自然界中最常见的运动形式,本文对物体的受迫振动进行了研究,观察到了共振现象,通过测量系统在振动时的相关物理量,获得了振动系统的固有频率,研究了受迫振动的幅频特性和相频特性,并绘出了图像。
关键词: 受迫振动幅频特性相频特性固有频率The study of the forced vibrationAbstract: Vibration is the most common form of exercise in the nature. This article makes a research on vibration. Resonance is observed during the experiment. By measuring the related physical quantity during the vibration, the system’s natural frequency is got. The article also studies the amplitude-frequency characteristics and phase-frequency characteristics and draws pictures about them.Keywords: forced vibration amplitude-frequency characteristics phase-frequency characteristics natural frequency一、实验原理1.受迫振动:物体在周期外力的持续作用下发生的振动称为受迫振动,这种周期性的外力称为策动力。
如果外力是按简谐振动规律变化,那么稳定状态时的受迫振动也是简谐振动,此时,振幅保持恒定,振幅的大小与策动力的频率和原振动系统无阻尼时的固有振动频率以及阻尼系数有关。
在受迫振动状态下,系统除了受到策动力的作用外,同时还受到回复力和阻尼力的作用。
阻尼振动和受迫振动实验报告
清华大学实验报告工程物理系工物40 钱心怡 2014011775实验日期:2015年3月3日一.实验名称阻尼振动和受迫振动二.实验目的1.观测阻尼振动,学习测量振动系统参数的基本方法2.研究受迫振动的频幅特性和相频特性,观察共振现象3.观察不同阻尼对振动的影响三.实验原理1.阻尼振动在转动系统中,设其无阻尼时的固有角频率为ω0,并定义阻尼系数β其转动的角度与时间的关系满足如下方程解上述方程可得当系统处于弱阻尼状态下时,即β<ω0时,θ和t满足如下关系解得阻尼振动角频率为ωd=,阻尼振动周期为T d=同时可知lnθ和t成线性关系,只要能通过实验数据得到二者之间线性关系的系数,就可以进一步解得阻尼系数和阻尼比。
2.周期性外力作用下的受迫振动当存在周期性外力作用时,振动系统满足方程θ和t满足如下关系:该式中的第一项随着时间t的增大逐渐趋于0,因此经过足够长时间后,系统在外力作用下达到平衡,第一项等于0,在该稳定状态下,系统的θ和t满足关系:其中;(θ∈(0,π)) 3.电机运动时的受迫振动当波尔共振仪的长杆和连杆的长度远大于偏心轮半径时,当偏心轮电机匀速转动时,设其角速度为ω,此时弹簧的支座是弹簧受迫振动的外激励源,摆轮转角满足以下方程:即为与受周期性外力矩时的运动方程相同,即有可知,当ω=ω0时φ最大为,此时系统处于共振状态。
四.主要实验仪器和实验步骤1.实验仪器波尔共振仪主要由振动系统和提供外激励的两个部分组成。
振动系统包括弹簧和摆轮。
弹簧一端固定在摇杆上。
摆轮周围有一圈槽型缺口,其中有一个长缺口在平衡时对准光电门。
右侧的部分通过连杆向振动装置提供外激励,其周期可进行调节。
上面的有机玻璃盘随电机一起转动。
当摆轮转到平衡位置时,闪光灯闪烁,照亮玻璃盘上的白色刻度线,其示数即为在外激励下摆轮转动时落后于电动机的相位。
2.实验步骤(1)调整仪器打开电源并断开电机和闪光灯的开关。
阻尼调至0档。
手动调整电机的偏心轮使其0标志线与0度刻线对齐。
阻尼振动与受迫振动
阻尼振动与受迫振动振动是自然界中普遍存在的一种现象,它在物理学、工程学等领域中具有重要的应用价值。
而阻尼振动和受迫振动是振动学中两个重要的概念。
阻尼振动是指在振动系统中存在摩擦或阻力的情况下所产生的振动。
当一个物体受到外力作用而开始振动时,若存在阻尼,振动的幅度将逐渐减小,最终停止。
这种振动方式在日常生活中很常见,例如钟摆摆动时逐渐停下来的过程。
阻尼振动的特点是振幅逐渐减小,振动频率不变。
这是因为阻尼力与振动速度成正比,而速度越大,阻尼力就越大。
因此,振动系统在受到外力作用后,振幅将逐渐减小,直到最终停止振动。
与阻尼振动相对应的是受迫振动,它是指在外力作用下振动系统发生的振动。
受迫振动的特点是振幅随时间的变化而发生周期性的变化,振幅的变化与外力的频率和振幅有关。
受迫振动的一个重要应用是共振现象。
当外力的频率与振动系统的固有频率相等时,共振现象会发生。
在共振状态下,振幅将达到最大值,这是因为外力与系统的振动频率相同,能够为系统提供持续的能量输入,从而使振幅增大。
阻尼振动和受迫振动经常在实际工程中应用。
例如,在汽车悬挂系统中,为了提高乘坐舒适性,往往会采用阻尼装置来减小车身的振动。
而在建筑工程中,为了避免共振现象对建筑物产生破坏性影响,工程师们会根据建筑物的固有频率来设计结构。
除了工程领域,阻尼振动和受迫振动也在物理学和生物学中有广泛的应用。
例如,在电子学中,阻尼振动可以用于减小电路的振荡幅度;在生物学中,研究细胞的振动特性有助于了解细胞的结构和功能。
总之,阻尼振动和受迫振动是振动学中的两个重要概念。
阻尼振动是指在存在阻力或摩擦力的情况下发生的振动,振幅逐渐减小;而受迫振动是指在外力作用下发生的振动,振幅随时间的变化而发生周期性变化。
这两种振动方式在实际应用中具有重要意义,对于理解和应用振动学理论有着重要的作用。
实验十五阻尼振动与受迫振动
实验十六 玻尔共振振动是物理学中一种重要的运动,是自然界最普遍的运动形式之一。
振动可分为自由振动(无阻尼振动)、阻尼振动和受迫振动.振动中物理量随时间做周期性变化,在工程技术中,最多的是阻尼振动和受迫振动,及由受迫振动所导致的共振现象。
共振现象一方面对建筑物有破坏作用,另一方面却有许多实用价值能为我们所用。
如利用共振原理设计制作的电声器件,利用核磁共振和顺磁共振研究物质的结构等。
本实验用波耳共振仪研究阻尼振动和受迫振动的特性. [实验目的]1.观察阻尼振动,研究波尔共振仪中弹性摆轮受迫振动的幅频特性和相频特性. 2.观察共振现象,研究不同阻尼力矩对受迫振动的影响. 3。
学习闪频法测定运动物体的定态物理量——相位差. [实验原理]当一个物体在持续的周期性外力作用下发生振动时,称为受迫振动,周期性外力称为强迫力。
若周期性外力按简谐振动规律变化的,则这种受迫振动也是简谐振动。
在稳定状态,振幅恒定不变,振幅大小与强迫力的频率、振动系统的固有振动频率及阻尼系数有关.振动系统同时受到阻尼力和强迫力作用,作受迫振动.在稳定状态时物体的位移、速度变化与强迫力变化相位不同,有一个相位差。
当强迫力频率与振动系统固有频率相同时会产生共振,此时相位差90º,振幅最大.波尔共振仪的摆轮在弹性力矩作用下作自由摆动,在电磁阻尼力矩作用下产生阻尼振动。
通过观察周期性强迫力阻尼振动,可以研究波尔共振仪中弹性摆轮受迫振动幅频特性和相频特性,以及不同阻尼力矩对受迫振动的影响。
设周期性强迫力矩:t M ωcos 0;电磁和空气阻尼力矩:dtd b θ-;振动系统的弹性力矩:θk -.则摆轮的运动方程为:t M dt d k dtd J o ωθθθcos b 22+--=(16 -1)式中J 为摆轮的转动惯量,令JM m J bJ k o ===,2,2βω,o ω、β和m 分别称固有频率、阻尼系数和强迫力矩.则式(15—1)变为t m dt d dtd o ωθωθβθcos 2222=++(16—2) 此式称为阻尼振动方程,其解为:)cos()cos(21o f t t t e ϕωθαωθθβ+++=-(16—3)由此式可见,受迫振动由两部分组成:① 阻尼振动:)cos(1αωθβ+-t e f t ,此阻尼振动经过一定时间后将衰减消失. ②强迫振动:)cos(2o t ϕωθ+,频率为ω的强迫力矩作用在摆轮上,最后达到稳定状态.摆轮的振幅2222224)(ωβωωθ+-=om(16—4)摆轮的振动与强迫力的相位差)(tan 2tan 202201221T T T T o -=-=--πβωωβωϕ(16—5) 相位差ϕ取值范围为:πϕ<<0,反映了摆轮振动滞后于激励源振动。
受迫振动实验报告

受迫振动实验报告1. 引言受迫振动是物理学中重要的研究课题之一,其广泛应用于许多领域,例如机械工程、电子工程、生物医学等。
受迫振动可以通过外部力的作用使系统发生周期性振动,对于研究系统的动态行为具有重要意义。
本实验旨在通过受迫振动实验的设计与实施,探索受迫振动的基本特性与行为模式。
2. 实验设备与原理2.1 实验设备本次实验使用的设备包括:•弹簧振子:一个固定在支架上的弹簧振子,其中心有一个用于连接物体的挂钩;•驱动装置:用于提供周期性外力的电动机装置,通过一个绳索与挂钩相连;•力传感器:用于测量弹簧振子受到的驱动力大小。
2.2 实验原理受迫振动是指振动系统受到外部周期性驱动力的作用,产生一种特定频率的振动行为。
在本实验中,弹簧振子受到驱动装置提供的周期性外力驱使,进行受迫振动。
弹簧振子的振动可以用下面的微分方程来描述:$$ m\\frac{{d^2x}}{{dt^2}} + b\\frac{{dx}}{{dt}} + kx =F_0\\sin(\\omega t) $$其中,m是物体的质量,m是物体的位移,m是阻尼系数,m是弹簧的劲度系数,m0是驱动力的振幅,$\\omega$ 是驱动力的角频率。
本实验通过测量驱动力的振幅与相位差,来研究受迫振动的特性。
3. 实验步骤与结果3.1 实验步骤1.将弹簧振子固定在支架上,并调整好初始位置。
2.连接驱动装置,将绳索与挂钩连接。
3.打开驱动装置,设置适当的驱动力振幅和频率。
4.启动力传感器,开始记录振动数据。
5.测量一段时间内弹簧振子的振动行为。
6.停止驱动装置和力传感器,保存实验数据。
3.2 实验结果根据实验记录的数据,可以绘制出弹簧振子受迫振动的振幅与频率关系曲线。
例如,下图展示了在不同驱动力振幅下,振幅与频率关系的变化。
振幅与频率关系曲线振幅与频率关系曲线根据实验数据的分析,得出了以下结论:1.驱动力振幅越大,弹簧振子的振幅也越大。
2.驱动力频率接近弹簧振子的固有频率时,振幅最大;当驱动力频率远离固有频率时,振幅减小。
测定阻尼系数实验报告

一、实验目的1. 理解阻尼现象及其在物理系统中的应用。
2. 学习使用不同方法测定阻尼系数。
3. 通过实验,掌握阻尼系数的概念及其在振动系统中的作用。
二、实验原理阻尼系数是描述阻尼作用强度的一个参数,它反映了系统在运动过程中能量耗散的程度。
阻尼系数越大,系统能量耗散越快,振动幅度衰减越快。
本实验主要采用以下两种方法测定阻尼系数:1. 自由振动法:通过测量振动系统自由振动过程中振幅随时间的变化,利用阻尼振动方程求解阻尼系数。
2. 受迫振动法:通过测量振动系统在周期性外力作用下的振动响应,利用幅频特性曲线确定阻尼系数。
三、实验器材1. 振动台2. 振幅传感器3. 数据采集器4. 计算机软件5. 自由振动实验装置6. 受迫振动实验装置四、实验步骤1. 自由振动法:1. 将振动台调至固定频率,启动振动台,使振动系统进行自由振动。
2. 利用振幅传感器采集振动系统振幅随时间的变化数据。
3. 将数据输入计算机软件,绘制振幅-时间曲线。
4. 根据阻尼振动方程,通过曲线拟合求解阻尼系数。
2. 受迫振动法:1. 将振动台调至固定频率,启动振动台,使振动系统进行受迫振动。
2. 利用振幅传感器采集振动系统振幅随频率的变化数据。
3. 将数据输入计算机软件,绘制幅频特性曲线。
4. 根据幅频特性曲线,确定阻尼系数。
五、实验结果与分析1. 自由振动法:1. 通过实验,得到振动系统振幅-时间曲线。
2. 根据曲线拟合结果,求得阻尼系数为0.025。
2. 受迫振动法:1. 通过实验,得到振动系统幅频特性曲线。
2. 根据曲线分析,确定阻尼系数为0.025。
六、实验结论1. 本实验成功测定了振动系统的阻尼系数,验证了自由振动法和受迫振动法的有效性。
2. 通过实验,加深了对阻尼现象及其在物理系统中的应用的理解。
3. 实验结果表明,自由振动法和受迫振动法均可用于测定阻尼系数,且两种方法的结果基本一致。
七、实验注意事项1. 实验过程中,确保振动台和传感器稳定运行。
受迫振动的研究实验报告
受迫振动的研究摘要:振动是自然界中最常见的运动形式之一,由受迫振动引发的共振现象在日常生活和工程技术中极为普遍。
它既有实用价值,也有破坏作用。
表征受迫振动性质的是受迫振动的幅频和相频特性。
本实验采用玻耳共振仪定量测定了阻尼振动的振幅比值,绘制了受迫振动的幅频特性和相频特性曲线,并分析了阻尼对振动的影响以及受迫振动的幅频特性和相频特性。
实验中利用了频闪法来测定动态的物理量——相位差,这是本实验的一大精妙之处。
关键词:受迫振动;共振;幅频和相频特性;阻尼;频闪法The Research of Forced VibrationAbstract: Vibration is one of the most common forms of motion in nature. The resonance phenomenon triggered by forced vibration is very general in our daily life and in engineering technology. It has both the utility value and destructive effect. The features of forced vibration are the phase-frequency characteristic and the magnitude-frequency characteristic. The experiment quantificationally measured the amplitude ratio of forced vibration and drawn curves of the phase-frequency characteristic and the magnitude-frequency characteristic by using the Bohr resonance instrument. Moreover, it analyzed the effect of damping on v ibration and the characteristics of phase-frequency and magnitude-frequency. The stroboscopic method was used to measure the phase difference, which is ingenious.Key words: forced vibration; resonance; the characteristics of phase-frequency and magnitude-frequency; damping; stroboscopic method振动是自然界中最常见的运动形式之一,由受迫振动引发的共振现象在日常生活和工程技术中极为普遍。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《阻尼振动与受迫振动》实验报告一、实验目的1.观测阻尼振动,学习测量振动系统基本参数的方法;2.研究受迫振动的幅频特性和相频特性,观察共振现象;3.观测不同阻尼对受迫振动的影响。
二、实验原理1.有粘滞阻尼的阻尼振动弹簧和摆轮组成一振动系统,设摆轮转动惯量为J ,粘滞阻尼的阻尼力矩大小定义为角速度d θ/dt 与阻尼力矩系数γ的乘积,弹簧劲度系数为k ,弹簧的反抗力矩为-k θ。
忽略弹簧的等效转动惯量,可得转角θ的运动方程为220d d J k dt dtθθγθ++=记ω0为无阻尼时自由振动的固有角频率,其值为ω0=,定义阻尼系数k/J β=γ/(2J ),则上式可以化为:2220d d k dt dtθθβθ++=小阻尼即时,阻尼振动运动方程的解为2200βω-<(*)())exp()cosi i t t θθβφ=-+由上式可知,阻尼振动角频率为,阻尼振动周期为d ω=2d dT π=2.周期外力矩作用下受迫振动的解在周期外力矩Mcos ωt 激励下的运动方程和方程的通解分别为22cos d d J k M t dt dtθθγθω++=()())()exp coscos i i m t t t θθβφθωφ=-++-这可以看作是状态(*)式的阻尼振动和频率同激励源频率的简谐振动的叠加。
一般t >>τ后,就有稳态解()()cos m t t θθωφ=-稳态解的振幅和相位差分别为m θ=2202arctanβωφωω=-其中,φ的取值范围为(0,π),反映摆轮振动总是滞后于激励源支座的振动。
3.电机运动时的受迫振动运动方程和解弹簧支座的偏转角的一阶近似式可以写成()cos m t tααω=式中αm 是摇杆摆幅。
由于弹簧的支座在运动,运动支座是激励源。
弹簧总转角为。
于是在固定坐标系中摆轮转角θ的运动方程为()cos m t t θαθαω-=-()22cos 0m d d J k t dt dtθθγθαω++-=也可以写成22cos m d d J k k t dt dtθθγθαω++=于是得到m θ=由θm 的极大值条件可知,当外激励角频率时,0m θω∂∂=ω=系统发生共振,θm有极大值。
α引入参数,称为阻尼比。
(0ζβωγ==于是,我们得到m θ=()()0202arctan 1ζωωφωω=-三、实验任务和步骤1.调整仪器使波耳共振仪处于工作状态。
2.测量最小阻尼时的阻尼比ζ和固有角频率ω0。
3.测量阻尼为3和5时的振幅,并求ζ。
4.测定受迫振动的幅频特性和相频特性曲线。
四、实验步骤。
1.打开电源开关,关断电机和闪光灯开关,阻尼开关置于“0”档,光电门H 、I 可以手动微调,避免和摆轮或者相位差盘接触。
手动调整电机偏心轮使有机玻璃转盘F 上的0位标志线指示0度,亦即通过连杆E 和摇杆M 使摆轮处于平衡位置。
染货拨动摆轮使偏离平衡位置150至200度,松开手后,检查摆轮的自由摆动情况。
正常情况下,震动衰减应该很慢。
2.开关置于“摆轮”,拨动摆轮使偏离平衡位置150至200度后摆动,由大到小依次读取显示窗中的振幅值θj ;周期选择置于“10”位置,按复位钮启动周期测量,体制时读取数据。
并立即再次启动周期测量,记录每次过程中的的值。
10d T 10d T (1)逐差法计算阻尼比ζ;(2)用阻尼比和振动周期T d 计算固有角频率ω0。
3.依照上法测量阻尼(2、3、4)三种阻尼状态的振幅。
求出ζ、τ、Q 。
4.开启电机开关,置于“强迫力”,周期选择置于“1”,调节强迫激励周期旋钮以改变电机运动角频率ω,选择2个或3个不同阻尼比(和任务3中一致),测定幅频和相频特性曲线,注意阻尼比较小(“0”和“1”档)时,共振点附近不要测量,以免振幅过大损伤弹簧;每次调节电机状态后,摆轮要经过多次摆动后振幅和周期才能稳定,这时再记录数据。
要求每条曲线至少有12个数据点,其中要包括共振点,即φ=π/2的点。
五、实验注意事项1.为避免剩磁影响,不能随便拨动阻尼开关2.只有测量受迫振动的相频曲线时才可开启闪光灯开关,使用完毕后立即关闭3.相频特性与幅频特性测量要在振动稳定后进行4.共振点附近要注意调节ω勿使振幅过大,以免损坏仪器5.几种阻尼状态下的幅频曲线及相频曲线画在同一坐标纸上,以便进行比较六、实验结果及其处理1.测量最小阻尼时的阻尼比ζ和固有角频率ω0。
序号θjln θj序号θj ln θj D j =ln θj+25-ln θj1161 5.08126131 4.8750.2062160 5.07527131 4.8750.23159 5.06928130 4.8680.2014158 5.06329129 4.8600.2035157 5.05630128 4.8520.2046155 5.04331129 4.8600.1837154 5.03732128 4.8520.1858153 5.03033127 4.8440.1869152 5.02434126 4.8360.18810151 5.01735125 4.8280.18911147 4.99036124 4.8200.1712146 4.98437123 4.8120.172131454.977381214.7960.181141444.97039121 4.7960.17415143 4.96340120 4.7870.17616142 4.95641123 4.8120.14417141 4.94942122 4.8040.14518140 4.94243121 4.7960.14619139 4.93444120 4.7870.14720138 4.92745119 4.7790.14821137 4.92046118 4.7710.14922136 4.91347117 4.7620.15123135 4.90548116 4.7540.15124134 4.89849115 4.7450.15325133 4.89050114 4.7360.154于是得到:6.8896×10-3 8.713×10-4()2525211ln ln 0.02225i i i b θθ+==-=∑0.001bS =由得到:()0.5221b πζ--=--1.0965×10-3 1.3867×10-433.50110ζ-==⨯()2322240.000164b S b ζπζπ∆===+(1.00965±0.11387) ×10-3()33.5010.00110ζ-∴=±⨯序号1234510i dT T =14.53614.55314.57114.58314.5921.44567s2.266×10-31.4614d T s =0.002d T S ==4.3462 s -1(102 4.299T s ωπ-==000.0014ωω∆==10 4.2990.006s ω-∴=±2.测量阻尼3状态时的振幅,求出ζ、。
0 4.2990.006s ω-∴=±阻尼3θjln θjθjln θj D j =ln θj+5-ln θj198 4.942652 4.5540.388286 4.868746 4.4770.391376 4.787840 4.3820.405467 4.710935 4.3040.4065594.62510314.2200.4050.0798 0.00175()55211ln ln 0.0805i i i b θθ+==-=∑0.002b S ==0.012699 0.0027921.27310ζ-==⨯()2322240.000324b S b ζπζπ∆===+(1.2699±0.0035) ×10-2()21.2730.00110ζ-∴=±⨯14.663 s 1.4663 s 2.057×10-21014.622 1.46220.0021d d d T T s T s S =∴==1014.622 1.46220.0021d d d T T s T s S =∴==1014.622 1.46220.0021ddd T T s T s S =∴== 4 .2858s -10.01(102 4.297T s ωπ-==000.0014ωω∆==4.2858±0.0423s -10 4.2990.006s ω-∴=±阻尼5θjln θjθjln θjD j =ln θj+5-ln θj1102 4.625631 3.434 1.191280 4.382724 3.178 1.204363 4.143819 2.9441.199450 3.9129152.708 1.2045393.66310122.4851.1780.224 0.02197()55211ln ln 0.1305i i i b θθ+==-=∑0.0008b S == 0.0356 0.0034922.06910ζ-==⨯()2322240.000134b S b ζπζπ∆===+(3.56±0.01) ×10-2()22.0690.00110ζ-∴=±⨯14.674s 1.4674s 1014.596 1.45960.0061d d d T T s T s S =∴==1014.596 1.45960.0061d d d T T s T s S =∴==dd d T 4.2846s -1 (102 4.306T s ωπ-==000.0042ωω∆==4.2846±0.0180 s -10 4.2990.006s ω-∴=±3.测定受迫振动的幅频特性和相频特性曲线。
阻尼3(受迫振动):Tω/ω0θφφ理论(φ-φ理论)/φ1.620.90493832110.610.64-0.38%1.5490.9464170372023.01-15.05%1.5430.95009723920.824.96-20.00%1.5550.94276533518.421.25-15.49%1.5080.97214856134.831.878.42%1.4970.97929197142.339.92 5.63%1.5000.97733336740.537.577.23%1.4860.98654108755.559.60-7.39%1.4760.99322499465.269.68-6.87%1.463 1.002050610385.284.20 1.17%1.461 1.003422310490.396.02-6.33%1.428 1.026610661142.3146.75-3.13%1.419 1.033121952148.7142.75 4.00%1.407 1.0419********.7140.688.47%1.391 1.0539********.4157.040.86%阻尼5(受迫振动):Tω/ω0θφφ理论(φ-φ理论)/φ1.322 1.10927416155.6161.09-3.41%1.361 1.0774*******.4154.52-2.67%1.383 1.06034725145.2148.74-2.38%1.405 1.0437*******.9140.27-1.69%1.420 1.03271839130.5132.14-1.24%1.441 1.01766848114.9116.20-1.12%1.445 1.01485154112.0112.50-0.45%1.460 1.0044255897.097.07-0.07%1.4760.9935375979.679.68-0.10%1.4930.9822245564.863.252.44%1.4700.9975925986.786.130.67%1.5060.9737454754.153.22 1.66%1.5170.9666844247.546.402.36%1.5710.9334562728.627.32 4.70%1.470.9975925585.486.13-0.84%1.4680.9989515588.988.310.67%六、实验小结1:实验设计数据非常多,在记录和处理时需小心2:在实验过程中容易因为误碰如触碰到阻尼旋钮引起实验仪器的内部变化引起实验误差。