方位角计算公式
坐标反算方位角公式
坐标反算方位角公式坐标反算方位角是指根据两点的经纬度坐标,计算出其中一点相对于另一点的方位角。
方位角是指从某一点朝向另一点的方向,通常以正北方向为基准,顺时针旋转的角度。
计算方位角需要用到球面三角学中的相关公式,下面是相关参考内容。
1. 地球几何模型在球面三角学中,地球通常被近似为一个球体或椭球体。
球体的半径通常用 R 表示,一般取平均半径,如地球平均半径为6371 公里。
2. 大圆弧距离计算公式两点之间的大圆弧距离是两点所在大圆所对应的地球表面上的弧长。
使用球面三角学中的 Haversine 公式可以计算出两点之间的大圆弧距离。
Haversine 公式如下:a = sin²(Δφ/2) + cos(φ1) * cos(φ2) * sin²(Δλ/2)c = 2 * atan2(√a, √(1-a))d = R * c其中,(φ1, λ1) 和(φ2, λ2) 分别表示两点的纬度和经度,Δφ 和Δλ 表示纬度和经度的差值,d 表示两点之间的弧长,R 表示地球的半径。
3. 方位角计算公式根据两点之间的经纬度可以计算出两点之间的大圆弧距离。
为了计算出方位角,可以使用以下公式:θ = atan2(sin(Δλ) * cos(φ2), cos(φ1) * sin(φ2) - sin(φ1) *cos(φ2) * cos(Δλ))其中,(φ1, λ1) 和(φ2, λ2) 分别表示两点的纬度和经度,Δλ 表示经度的差值,θ 表示从第一个点指向第二个点的方位角。
需要注意的是,计算出的方位角是以正北方向为基准的逆时针角度,范围为 -π 到π。
4. 数值计算和单位转换在计算过程中,需要使用三角函数以及角度和弧度之间的转换。
大部分编程语言会提供相关的数学库函数来进行这些计算。
在计算方位角时,常见的角度单位是弧度,需要将计算结果转换为度数进行展示。
以上是坐标反算方位角的相关参考内容。
通过使用大圆弧距离计算公式和方位角计算公式,我们可以根据两点的经纬度坐标来计算出其中一点相对于另一点的方位角。
两点方位角计算公式
两点方位角计算公式以两点方位角计算公式为标题,写一篇文章,要求符合标题内容,不少于300字方位角是指从某一点出发,以正北方向为基准,逆时针旋转的角度,到达另一点的方向。
在实际应用中,我们常常需要计算两点之间的方位角,以便确定方向和位置。
本文将介绍两点方位角的计算公式及其应用。
两点方位角的计算公式如下:tanθ = sin(ΔL) / (cos(φ1) * tan(φ2) - sin(φ1) * cos(ΔL))其中,θ为两点之间的方位角,ΔL为两点经度差,φ1和φ2为两点的纬度。
这个公式的推导过程比较复杂,不在本文的讨论范围内。
我们只需要知道如何使用这个公式来计算两点之间的方位角即可。
假设我们要计算A点(40.7128°N, 74.0060°W)到B点(37.7749°N, 122.4194°W)的方位角。
首先,我们需要将经纬度转换为弧度:φ1 = 40.7128° * π / 180 = 0.7102 radφ2 = 37.7749° * π / 180 = 0.6598 radΔL = (122.4194° - 74.0060°) * π / 180 = 0.8727 rad将这些值代入公式中,得到:tanθ = sin(0.8727) / (cos(0.7102) * tan(0.6598) - sin(0.7102) * cos(0.8727))θ = 1.768 rad = 101.3°因此,A点到B点的方位角为101.3°,即从A点出发,顺时针旋转101.3°后到达B点的方向。
两点方位角的应用非常广泛,例如在航海、航空、地图制作等领域都有重要的应用。
在航海中,船舶需要根据两点方位角确定航向,以便到达目的地。
在航空中,飞机需要根据两点方位角确定飞行方向,以便安全到达目的地。
在地图制作中,我们需要根据两点方位角确定地图上两点之间的方向和距离。
角度、坐标测量计算公式细则

计算细则1、坐标计算:X1=X+Dcosα,Y1=Y+Dsinα。
式中 Y、X为已知坐标,D为两点之间的距离,Α为方位角。
2、方位角计算:1)、方位角=tan=两坐标增量的比值,然后用计算器按出他们的反三角函数(±号判断象限)。
2)、方位角:arctan(y2-y1)/(x2-x1)。
加减180(大于180就减去180(还大于360就在减去360)、小于180就加180 如果x轴坐标增量为负数,则结果加180°。
如果为正数,则看y轴的坐标增量,如果Y轴上的结果为正,则算出来的结果就是两点间的方位角,如果为负值,加360°。
S=√(y2-y1)+(x2-x1),1)、当y2-y1>0,x2-x1>0时;α=arctan(y2-y1)/(x2-x1)。
2)、当y2-y1<0,x2-x1>0时;α=360°+arctan(y2-y1)/(x2-x1)。
3)、当x2-x1<0时;α=180°+arctan(y2-y1)/(x2-x1)。
再用两点之间的距离公式可算距离(根号下两个坐标距离差的平方相加)。
拨角:arctan(y2-y1)/(x2-x1)1、例如:两条巷道要互相平行掘进的话,求它们的拨角:方法(前视边方位角减后视边方位)在此后视边方位要加减180°,若拨角结果为负值为左偏“逆时针”(+360°就可化为右偏,正值为右偏“顺时针”。
2、在图上标识方位的方法:就是导线边与Y轴的夹角。
3、高程计算:目标高程=测点高程+?h+仪器高—占标高。
4、直角坐标与极坐标的换算:(直角坐标用坐标增量表示;极坐标用方位角和边长表示) 1)、坐标正算(极坐标化为直角坐标)已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角,知A(Xa,Ya)、Sab、αab,求B(Xa,Ya)解:?Xab=Sab×COSαab 则有Xb=Xa+?Xab?Yab=Sab×SINαab Yb=Ya+?Yab2)、坐标反算,已知两点的坐标,求两点的距离(称反算边长)和方位角(称反算方位角)的方法已知A(Xa,Ya)、B(Xb,Yb),求αab、Sab。
方位角计算公式范文
方位角计算公式范文方位角是指从一个参考方向(通常是正北方向)起,按顺时针方向测量到其中一方向线的角度。
方位角通常用度数表示,范围从0度到360度。
下面介绍常见的方位角计算公式:1.方位角计算公式(两点坐标):假设已知起点坐标A(x1,y1)和终点坐标B(x2,y2),方位角θ的计算公式如下:θ = atan2(y2 - y1, x2 - x1)其中,atan2函数是一个双变量反正切函数,返回值为[-π, π]之间的角度值。
注意:上述公式计算得到的θ是以正北方向为参考的方位角。
如果要将方位角转换为以其他方向为参考的角度(如正东方向为0度),可以将θ减去相应的修正值。
2.方位角计算公式(两点经纬度):假设已知起点的经度(lon1)、纬度(lat1)和终点的经度(lon2)、纬度(lat2),方位角θ的计算公式如下:θ = atan2(sin(Δlon) * cos(lat2), cos(lat1) * sin(lat2) -sin(lat1) * cos(lat2) * cos(Δlon))其中,Δlon = lon2 - lon1是两点经度差。
注意:上述公式计算得到的θ是以正北方向为参考的方位角。
如果要将方位角转换为以其他方向为参考的角度(如正东方向为0度),可以将θ减去相应的修正值。
3.方位角计算公式(方向余弦矩阵):方向余弦矩阵(Direction Cosine Matrix)是一种将方位角和俯仰角等转化为三维空间坐标旋转的方式。
方向余弦矩阵的计算公式如下:D=[ cos(θ) * cos(φ), sin(θ) * cos(φ), -sin(φ) ][ -sin(θ), cos(θ), 0 ][ cos(θ) * sin(φ), sin(θ) * sin(φ), cos(φ) ]其中,θ是方位角,φ是俯仰角。
D是一个3行3列的矩阵,表示坐标变换矩阵。
上述是常见的方位角计算公式,根据不同的应用场景和问题,可能还会有其他的计算公式。
方位角计算公式
辅助 计算
点名 2 BM1 1
2
3
BM2
测站数 3 8 3 4 5
20
表 2-2 附合水准路线计算
观测高差 /m
改正数 /m
改正后高差 /m
4
5
6
+8.364
- 0.014
+8.350
- 1.433
- 0.005
- 1.438
- 2.745
- 0.007
- 2.752
+4.661
- 0.008
+4.653
+ 8.847
- 0.034
一、直线定向
1、正、反方位角换算
对直线
而言,过始点
的坐标纵轴平行线指北端顺时针至直线的夹角
是
的正方位角,而过端点
的坐标纵轴平行线指北端顺时针至直线的夹角
则是
的反方位角,同
一条直线的正、反方位角相差
,即同一直线的正反方位角
=
(1-13>
上式右
端,若
<
,用“+”号,若
,用“-”号。
2、象限角与方位角的换算
算
各
待
定
点
的
高
程
。
如上 所述,闭 合水准 路线的 计算方法除高差 闭合差 的计算有 所区别 而外,其余与附 合路线 的计算 完全相 同。
二
、
举
例
1.
附
合
水
准
路
线
算
例
5 / 26
下图 2-18 所示附合水准路线为例,已知水准点 A 、 B 和待定点 1、2、3 将整个路线分为四个测段。
测段号 1 1 2 3
方位角计算公式

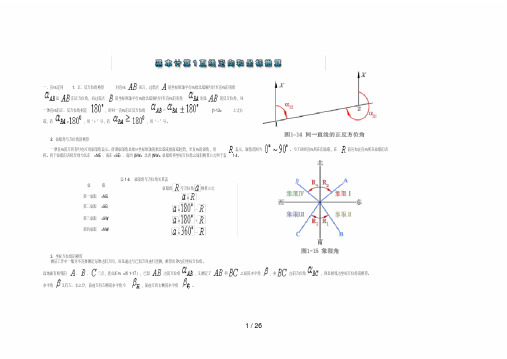
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13) 上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式第一象限(NE)=第二象限(SE)=-第三象限(SW)=+第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14) 设三点相关位置如图1-17()所示,应有=++-=+-(1-15) 若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16) 显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17) 上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
测量方位角计算公式
测量方位角计算公式测量方位角是指通过其中一种方法求得一些目标物体相对于指定基准方向的角度。
方位角通常使用度数表示,以正北方向为基准,沿顺时针方向递增,范围为0到360度。
测量方位角在地理导航、测量工程、天文学等领域有着广泛的应用。
计算方位角的公式主要有以下几种:1. 方位角 = atan((E - E0) / (N - N0))其中,E、N为目标物体的东北坐标,E0、N0为基准点的东北坐标。
该公式适用于平面坐标系。
2. 方位角 = atan2(E - E0, N - N0)其中,E、N为目标物体的东北坐标,E0、N0为基准点的东北坐标。
该公式适用于平面坐标系,可以通过atan2函数直接得到方位角,避免了先计算斜率再反求角度的过程。
3. 方位角= atan((sin(ΔL) * cos(L2)) / (cos(L1) * sin(L2) - sin(L1) * cos(L2) * cos(ΔL)))其中,ΔL为目标物体经度减去基准点经度的差值,L1、L2分别为目标物体和基准点的纬度。
该公式适用于地理坐标系。
4. 方位角= arc tan((sin(Δλ) * cos(φ2)) / (cos(φ1) *sin(φ2) - sin(φ1) * cos(φ2) * cos(Δλ)))其中,Δλ为目标物体经度减去基准点经度的差值,φ1、φ2分别为目标物体和基准点的纬度。
该公式适用于地理坐标系,常用于计算大地方位角。
这些公式的推导及原理比较复杂,涉及到三角学和二元一次方程等知识。
在实际应用中,可以通过使用现成的工具或软件来计算方位角,如地图软件、GPS定位设备等。
这些工具会自动计算目标物体相对于基准方向的角度,准确性高、方便快捷,可以满足大部分测量需要。
需要注意的是,测量方位角是基于特定坐标系的,不同坐标系的方位角计算公式可能有所不同。
另外,由于地球是一个球体,使用平面坐标系进行测量会引入一定的误差,尤其是在较长的距离范围内。
工程测量常用计算公式
工程测量常用计算公式一、 方位角的计算公式二、 平曲线转角点偏角计算公式三、 平曲线直缓、缓直点的坐标计算公式 四、 平曲线上任意点的坐标计算公式 五、 竖曲线上点的高程计算公式 六、 超高计算公式七、 地基承载力计算公式 八、 标准差计算公式一、 方位角的计算公式1. 字母所代表的意义:x 1:QD 的X 坐标 y 1:QD 的Y 坐标 x 2:ZD 的X 坐标 y 2:ZD 的Y 坐标 S:QD~ZD 的距离 α:QD~ZD 的方位角 2. 计算公式:212212y y x x S1)当y 2- y 1>0,x 2- x 1>0时:1212x x y y arctg2)当y 2- y 1<0,x 2- x 1>0时:1212360x x y y arctg3)当x 2- x 1<0时:1212180x x y y arctg二、 平曲线转角点偏角计算公式 1. 字母所代表的意义:α1:QD~JD 的方位角 α2:JD~ZD 的方位角 β:JD 处的偏角β=α2-α1(负值为左偏、正值为右偏)三、 平曲线直缓、缓直点的坐标计算公式1. 字母所代表的意义:U:JD 的X 坐标 V:JD 的Y 坐标A:方位角(ZH~JD)T:曲线的切线长,2322402224R L L D tg R L R T s s sD:JD 偏角,左偏为-、右偏为+ 2. 计算公式:直缓(直圆)点的国家坐标:X′=U+Tcos(A+180°)Y′=V+Tsin(A+180°)缓直(圆直)点的国家坐标:X″=U+Tcos(A+D)Y″=V+Tsin(A+D)四、 平曲线上任意点的坐标计算公式1. 字母所代表的意义:P:所求点的桩号B:所求边桩~中桩距离,左-、右+ M:左偏-1,右偏+1 C:JD 桩号 D:JD 偏角 L s :缓和曲线长A:方位角(ZH~JD) U:JD 的X 坐标 V:JD 的Y 坐标T:曲线的切线长,2322402224R L L D tg R L R T s s sI=C-T:直缓桩号J=I+L:缓圆桩号s L DRJ H 180:圆缓桩号K=H+L:缓直桩号1)当P<I 时中桩坐标:X m =U+(C-P)cos(A+180°) Y m =V+(C-P)sin(A+180°) 边桩坐标:X b =X m +Bcos(A+90°) Y b =Y m +Bsin(A+90°)2)当I<P<J 时s230RL I P MA O 2390R I P I P G中桩坐标:X m =U+Tcos(A+180°)+GcosOY m =V+Tsin(A+180°)+GsinOs290RL I P W边桩坐标:X b =X m +Bcos(A+MW+90°) Y b =Y m +Bsin(A+MW+90°)3)当J<P<H 时R J P L M A R J P R L M A O s s909090 RJ P R G 90sin2 中桩坐标: O G R L M A R L L A T U X s ss m cos 30cos 90180cos 23O G R L M A R L L A T V Y s ss m sin 30sin 90180sin 23RJ P W90边桩坐标:X b =X m +Bcos(O+MW+90°) Y b =Y m +Bsin(O+MW+90°)4)当H<P<K 时sRL K P MMD A O 230180 2390R P K P K G中桩坐标:X m =U+Tcos(A+MD)+GcosOY m =V+Tsin(A+MD)+GsinOs290RL K P W边桩坐标:X b =X m +Bcos(A+MD-MW+90°) Y b =Y m +Bsin(A+MD-MW+90°)5)当P>K 时中桩坐标:X m =U+(T+P-K)cos(A+MD) Y m =V+(T+P-K)sin(A+MD) 边桩坐标:X b =X m +Bcos(A+MD+90°) Y b =Y m +Bsin(A+MD+90°)注:计算公式中距离、长度、桩号单位:“米”;角度测量单位:“度”;若要以“弧度”为角度测量单位,请将公式中带°的数字换算为弧度。
(整理)方位角计算公式

一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表象限象限角与方位角换算公式=第一象限(NE)第二象限(SE)=-=+第三象限(SW )第四象限(NW)=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
角度坐标测量计算公式细则
角度坐标测量计算公式细则文件编码(008-TTIG-UTITD-GKBTT-PUUTI-WYTUI-8256)计算细则1、坐标计算:X1=X+Dcosα,Y1=Y+Dsinα。
式中 Y、X为已知坐标,D为两点之间的距离,Α为方位角。
2、方位角计算:1)、方位角=tan=两坐标增量的比值,然后用计算器按出他们的反三角函数(±号判断象限)。
2)、方位角:arctan(y2-y1)/(x2-x1)。
加减180(大于180就减去180(还大于360就在减去360)、小于180就加180如果x轴坐标增量为负数,则结果加180°。
如果为正数,则看y轴的坐标增量,如果Y轴上的结果为正,则算出来的结果就是两点间的方位角,如果为负值,加360°。
S=√(y2-y1)+(x2-x1),1)、当y2-y1>0,x2-x1>0时;α=arctan(y2-y1)/(x2-x1)。
2)、当y2-y1<0,x2-x1>0时;α=360°+arctan(y2-y1)/(x2-x1)。
3)、当x2-x1<0时;α=180°+arctan(y2-y1)/(x2-x1)。
再用两点之间的距离公式可算距离(根号下两个坐标距离差的平方相加)。
拨角:arctan(y2-y1)/(x2-x1)1、例如:两条巷道要互相平行掘进的话,求它们的拨角:方法(前视边方位角减后视边方位)在此后视边方位要加减180°,若拨角结果为负值为左偏“逆时针”(+360°就可化为右偏,正值为右偏“顺时针”。
2、在图上标识方位的方法:就是导线边与Y轴的夹角。
3、高程计算:目标高程=测点高程+h+仪器高—占标高。
4、直角坐标与极坐标的换算:(直角坐标用坐标增量表示;极坐标用方位角和边长表示)1)、坐标正算(极坐标化为直角坐标)已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角,知A(Xa,Ya)、Sab、αab,求B(Xa,Ya)解:Xab=Sab×COSαab 则有Xb=Xa+XabYab=Sab×SINαab Yb=Ya+Yab2)、坐标反算,已知两点的坐标,求两点的距离(称反算边长)和方位角(称反算方位角)的方法已知A(Xa,Ya)、B(Xb,Yb),求αab、Sab。
坐标方位角EXCEL计算公式
坐标方位角EXCEL计算公式1.计算坐标方位角的基本公式:方位角=ATAN2(y轴坐标差,x轴坐标差)2.公式解释:ATAN2是Excel的一个数学函数,用于计算给定点的反正切值。
其中,y轴坐标差为点的纵坐标与原点纵坐标之差,x轴坐标差为点的横坐标与原点横坐标之差。
3.公式应用示例:假设在A1单元格中输入点的横坐标,B1单元格中输入点的纵坐标,C1单元格中输入原点的横坐标,D1单元格中输入原点的纵坐标。
则在E1单元格中输入如下公式:=ATAN2(B1-$D$1,A1-$C$1)这样就可以得到点相对于原点的坐标方位角。
需要注意的是,Excel中的数学函数ATAN2返回的角度以弧度为单位,如果需要以度数显示,可以使用Excel的DEGREES函数将结果转换为度数。
例如,在F1单元格中输入如下公式:=DEGREES(E1)这样就可以得到以度数表示的坐标方位角。
在使用以上公式计算坐标方位角时,需要确保原点的横纵坐标与点的横纵坐标分别对应。
另外,Excel中的坐标系正方向为向右为x轴正方向,向下为y轴正方向,因此计算得到的方位角范围为-π到π,即-180°到180°。
如果需要将角度值映射到0°到360°的范围,可以使用如下公式:IF(F1<0,F1+360,F1)总结:在Excel中,我们可以使用ATAN2函数来计算坐标方位角,公式为方位角 = ATAN2(y轴坐标差, x轴坐标差)。
在计算得到的结果为弧度时,可以使用DEGREES函数将其转换为度数。
另外,如果需要将角度值映射到0°到360°的范围,可以使用IF函数进行判断和调整。
以上是关于在Excel中计算坐标方位角的基本方法和公式示例。
方位角的计算公式
方位角的计算公式方位角是指从其中一点出发,顺时针方向到另一个点的位置角度。
它通常用度数来表示,以正北方向为基准,逆时针方向为正方向。
方位角的计算公式主要有两种,一种使用正弦和余弦函数,另一种使用向量运算。
1.使用正弦和余弦函数的计算公式:假设点A的坐标为(Ax, Ay),点B的坐标为(Bx, By)。
首先需要计算两点之间的水平距离和垂直距离,即dx = Bx - Ax和dy = By - Ay。
然后可以计算方位角θ = arctan(dy/dx)。
但是由于arctan函数的值域是(-π/2, π/2),只能表示-90°到90°之间的角度,为了得到完整的方位角计算结果,还需要根据点的位置进行调整。
- 如果dx > 0且dy > 0,即点B位于点A的右上方,此时方位角为θ。
- 如果dx > 0且dy < 0,即点B位于点A的右下方,此时方位角为360° + θ。
- 如果dx < 0,即点B位于点A的左侧,此时方位角为180° + θ。
- 如果dx = 0且dy > 0,即点B位于点A的正北方向,此时方位角为90°。
- 如果dx = 0且dy < 0,即点B位于点A的正南方向,此时方位角为270°。
这样就可以得到点A到点B的方位角。
2.使用向量运算的计算公式:向量的加减可以表示方向的改变,因此方位角的计算也可以通过向量运算来实现。
假设点A的坐标为(Ax,Ay),点B的坐标为(Bx,By)。
首先构造向量AB,即将点B的坐标减去点A的坐标得到(ABx,ABy)。
然后可以计算该向量的方位角θ = arctan(ABy/ABx),同样需要根据点的位置进行调整。
-如果ABx>0且ABy>0,即点B位于点A的右上方,此时方位角为θ。
-如果ABx>0且ABy<0,即点B位于点A的右下方,此时方位角为360°+θ。
方位角计算公式
方位角计算公式部门: xxx时间: xxx整理范文,仅供参考,可下载自行编辑一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13> 上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东<NE)、南东<SE)、南西(SW>、北西(NW>。
象限角和坐标方位角之间的换算公式列于表1-4。
象限角与方位角换算公式==-=+=-3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线<图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17(>所示,应有=++ (1-14>设三点相关位置如图1-17(>所示,应有=++-=+- (1-15>若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16>显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17>上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
方位角计算公式
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13)上式右端,若<,用“+”号,若,用“-”号。
2、象限角与方位角的换算一条直线的方向有时也可用象限角表示。
所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。
为了说明直线所在的象限,在前应加注直线所在象限的名称。
四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。
象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表3、坐标方位角的推算测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。
设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。
水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有=++ (1-14)设三点相关位置如图1-17()所示,应有=++-=+- (1-15)若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式:=+(1-16)显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17)上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
二、坐标推算1、坐标的正算地面点的坐标推算包括坐标正算和坐标反算。
坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。
如图1所示,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为:XB=XA+ΔXABYB=YA+ΔYAB式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。
万能方位角计算公式
先计算出坐标增量:dX=Xb-XadY=Yb-YadY=dY+1E-10 为了使除数不为零而加一个很小的数方位角计算万能公式:Az=pi * (1-Sgn(dY)/2)-Atn(dX / dY)单位为弧度 Az=Az * 180 /pi 单位为度此公式计算无需判断象限,只需在值小于0时加上360即可!其中,sgn()为求符号函数,若dX<0时其值为-1,dX>0时为1,dX=0时为0。
使用此公式不用判断所在象限,直接将坐标增量代入即可求出方位角值,在用计算器编程时若没有SGN()函数可自行判断并用一个变量代替!VBA代码:'方位角计算函数 Azimuth()'Sx为起点X,Sy为起点Y'Ex为终点X,Ey为终点Y'Style指明返回值格式'Style=-1为弧度格式'Style=0为“DD MM SS”格式'Style=1为“DD-MM-SS”格式'Style=2为“DD°MMˊSS""”格式'Style=其它值时返回十进制度值Function Azimuth(Sx As Double, Sy As Double, Ex As Double, Ey As Double, Style As Integer)Dim DltX As Double, DltY As Double, A_tmp As Double, Pi As DoublePi = Atn(1) * 4 '定义PI值DltX = Ex - SxDltY = Ey - Sy + 1E-20A_tmp = Pi * (1 - Sgn(DltY) / 2) - Atn(DltX / DltY) '计算方位角A_tmp = A_tmp * 180 / Pi '转换为360进制角度Azimuth = Deg2DMS(A_tmp, Style)End Function'转换角度为度分秒'Style=-1为弧度格式'Style=0为“DD MM SS”格式'Style=1为“DD-MM-SS”格式'Style=2为“DD°MMˊSS""”格式'Style=其它值时返回十进制度值Function Deg2DMS(DegValue As Double, Style As Integer)Dim tD As Integer, tM As Integer, Ts As Double, tmp As DoubletD = Int(DegValue)tmp = (DegValue - tD) * 60tM = Int(tmp)tmp = (tmp - tM) * 60Ts = Round(tmp, 1)select Case StyleCase -1 '返回弧度Deg2DMS = DegValue * Atn(1) * 4 / 180Case 0Deg2DMS = tD & " " & Format(tM, "00") & " " & Format(Ts, "00.0")Case 1Deg2DMS = tD & "-" & Format(tM, "00") & "-" & Format(Ts, "00.0")Case 2Deg2DMS = tD & "°" & Format(tM, "00") & "ˊ" & Format(Ts, "00.0") & """" Case ElseDeg2DMS = DegValueEnd SelectEnd FunctionFunction pol(AX As Double, AY As Double, Bx As Double, By As Double) As Stringpol = Azimuth(AX, AY, Bx, By, 2) & " " & Distance(AX, AY, Bx, By, 3)End FunctionFunction rec(alpha As String, dist As Double) As StringDim Alpha_Rad As DoubleAlpha_Rad = StringToRad(alpha)rec = "dx:" & Round(Cos(Alpha_Rad) * dist, 3) & " dy:" &Round(Sin(Alpha_Rad) * dist, 3)End FunctionFunction StringToRad(strAz) '将字符串格式方位角转换成弧度格式Dim azSubStrIf strAz <> "" ThenazSubStr =Split(strAz, "-")If UBound(azSubStr) = 2 ThenStringToRad = (azSubStr(0) + azSubStr(1) / 60 + azSubStr(2) / 3600) * Atn(1) * 4 / 180ElseStringToRad = 0End IfElseStringToRad = 0End IfEnd Function。