5 线性方程组的直接解法
解线性方程组的直接方法
解线性方程组的直接方法一、高斯消元法高斯消元法是解线性方程组最常用的方法之一、它通过一系列的消元操作,将线性方程组转化为阶梯型方程组,从而求解未知数的值。
1.确定线性方程组的阶数和未知数的个数。
设线性方程组中有n个未知数。
2.将线性方程组写成增广矩阵的形式。
增广矩阵是一个n行n+1列的矩阵,其中前n列是线性方程组的系数矩阵,第n+1列是等号右边的常数。
3.通过初等行变换(交换行、数乘行、行加行)将增广矩阵化为阶梯型矩阵。
具体步骤如下:a.首先,找到第一个非零元素所在的列,将它所在的行视为第一行。
b.将第一行的第一个非零元素(主元)变成1,称为主元素。
c.将主元所在列的其他元素(次元素)变为0,使得主元所在列的其他元素只有主元素是非零的。
d.再找到第一个非零元素所在的列,将它所在的行视为第二行,并重复上述步骤,直到将增广矩阵化为阶梯型矩阵。
4.根据阶梯型矩阵求解未知数的值。
具体步骤如下:a.从最后一行开始,依次求解每个未知数。
首先,将最后一行中非零元素所在的列作为含有该未知数的方程,将该未知数的系数设为1b.将含有该未知数的方程中其他未知数的系数设为0,并对其他方程进行相应的变换,使得该未知数所在列的其他元素都为0。
c.重复上述步骤,直到求解出所有未知数的值。
高斯消元法的优点是简单易懂、容易实现,但当线性方程组的系数矩阵接近奇异矩阵时,计算精度可能会降低。
二、矩阵求逆法矩阵求逆法是解线性方程组的另一种直接方法。
它通过对系数矩阵求逆,然后与常数矩阵相乘,得到未知数的值。
1.确定线性方程组的阶数和未知数的个数。
设线性方程组中有n个未知数。
2.将线性方程组写成矩阵方程的形式,即Ax=b,其中A是一个n阶方阵,x和b分别是n维列向量。
3.求系数矩阵A的逆矩阵A^-1a. 首先,计算系数矩阵A的行列式det(A)。
b. 判断det(A)是否为0,如果det(A)=0,则该线性方程组无解或有无穷多解;如果det(A)≠0,则系数矩阵A可逆。
线性方程组直接解法

在求解线性规划问题时,高斯消元法 可以用于求解单纯形表中的方程组,
从而得到最优解。
矩阵求逆
通过高斯消元法可以将一个可逆矩阵 化为单位矩阵,从而求出其逆矩阵。
计算机图形学
在计算机图形学中,高斯消元法可以 用于求解三维变换矩阵,实现图形的 旋转、平移等操作。
2023
PART 03
克拉默法则
REPORTING
2023
PART 02
高斯消元法
REPORTING
高斯消元法的基本思想
通过对方程组的增广矩阵进行初等行 变换,将其化为行阶梯形矩阵,然后 逐步回代求解未知数。
高斯消元法的基本思想是将方程组中 的未知数逐一消去,从而得到一个易 于求解的三角形方程组。
高斯消元法的步骤
将方程组的增广矩阵写出来, 并对其进行初等行变换,化为 行阶梯形矩阵。
未来研究方向
高性能计算
随着计算资源的不断发展,研究如何 在高性能计算环境中更有效地应用直 接解法和迭代解法具有重要意义。
预处理技术
研究更有效的预处理技术,以 改善迭代解法的收敛性和稳定 性。
并行化与分布式计算
探索并行化和分布式计算技术 在解线性方程组中的应用,以 提高计算效率和可扩展性。
自适应算法
开发能够自适应地选择最合适 算法和参数的线性方程组求解 器,以提高求解效率和精度。
2023
THANKS
感谢观看
https://
REPORTING
从行阶梯形矩阵中,选取一个 主元,通过行变换将主元所在 的列的其他元素消为0。
重复上述步骤,直到所有未知 数都被消去,得到一个上三角 形方程组。
从上三角形方程组中,逐个回 代求解未知数。
解线性方程组的直接解法
解线性方程组的直接解法一、实验目的及要求关于线性方程组的数值解法一般分为两大类:直接法与迭代法。
直接法是在没有舍入误差的情况下,通过有限步运算来求方程组解的方法。
通过本次试验的学习,应该掌握各种直接法,如:高斯列主元消去法,LU分解法和平方根法等算法的基本思想和原理,了解它们各自的优缺点及适用范围。
二、相关理论知识求解线性方程组的直接方法有以下几种:1、利用左除运算符直接求解线性方程组为bx\=即可。
AAx=,则输入b2、列主元的高斯消元法程序流程图:输入系数矩阵A,向量b,输出线性方程组的解x。
根据矩阵的秩判断是否有解,若无解停止;否则,顺序进行;对于1p:1-=n选择第p列中最大元,并且交换行;消元计算;回代求解。
(此部分可以参看课本第150页相关算法)3、利用矩阵的分解求解线性方程组(1)LU分解调用matlab中的函数lu即可,调用格式如下:[L,U]=lu(A)注意:L往往不是一个下三角,但是可以经过行的变换化为单位下三角。
(2)平方根法调用matlab 中的函数chol 即可,调用格式如下:R=chol (A )输出的是一个上三角矩阵R ,使得R R A T =。
三、研究、解答以下问题问题1、先将矩阵A 进行楚列斯基分解,然后解方程组b Ax =(即利用平方根法求解线性方程组,直接调用函数):⎪⎪⎪⎪⎪⎭⎫ ⎝⎛--------=19631699723723312312A ,⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-=71636b 解答:程序:A=[12 -3 2 1;-3 23 -7 -3;2 -7 99 -6;1 -3 -6 19];R=chol(A)b=[6 3 -16 7]';y=inv(R')*b %y=R'\bx=inv(R)*y %x=R\y结果:R =3.4641 -0.8660 0.5774 0.28870 4.7170 -1.3780 -0.58300 0 9.8371 -0.70850 0 0 4.2514y =1.73210.9540-1.59451.3940x =0.54630.2023-0.13850.3279问题 2、先将矩阵A 进行LU 分解,然后解方程组b Ax =(直接调用函数):⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛----=8162517623158765211331056897031354376231A ,⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-=715513252b解答:程序:A=[1/3 -2 76 3/4 5;3 1/sqrt(3) 0 -7 89;56 0 -1 3 13;21 65 -7 8 15;23 76 51 62 81];b=[2/sqrt(5);-2;3;51;5/sqrt(71)];[L,U]=lu(A)y=inv(L)*bx=inv(U)*y结果:L = 0.0060 -0.0263 1.0000 0 00.0536 0.0076 -0.0044 0.1747 1.00001.0000 0 0 0 00.3750 0.8553 -0.6540 1.0000 00.4107 1.0000 0 0 0U =56.0000 0 -1.0000 3.0000 13.00000 76.0000 51.4107 60.7679 75.66070 0 77.3589 2.3313 6.91370 0 0 -43.5728 -50.06310 0 0 0 96.5050y =3.0000-0.63880.859850.9836-11.0590x =0.13670.90040.0526-1.0384-0.1146问题3、利用列主元的高斯消去法,求解下列方程组:⎪⎪⎩⎪⎪⎨⎧=+--=--+=-+-=+-+01002010100511.030520001.0204321432143214321x x x x x x x x x x x x x x x x解答:程序:function [RA,RB,n,X]=liezhu(A,b)B=[A b];n=length(b);RA=rank(A);RB=rank(B);zhica=RB-RA;if zhica>0disp('Çë×¢Ò⣺RA~=RB£¬ËùÒÔ´Ë·½³Ì×éÎ޽⡣')returnendif RA==RBif RA==ndisp('Çë×¢Ò⣺ÒòΪRA=RB=n,ËùÒÔ´Ë·½³Ì×éÓÐΨһ½â¡£')X=zeros(n,1);C=zeros(1,n+1);for p=1:n-1[Y ,j]=max(abs(B(p:n,p)));C=B(p,:);for k=p+1:nm=B(k,p)/B(p,p);B(k,p:n+1)=B(k,p:n+1)-m*B(p,p:n+1)endendb=B(1:n,n+1);A=B(1:n,1:n);X(n)=b(n)/A(n,n);for q=n-1:-1:1X(q)=(b(q)-sum(A(q,q+1:n)*X(q+1:n)))/A(q,q);endelsedisp('Çë×¢Ò⣺ÒòΪRA=RB¡´n£¬ËùÒÔ´Ë·½³ÌÓÐÎÞÇî¶à½â¡£') endend键入A=[1 20 -1 0.0012 -5 30 -0.15 1 -100 -102 -100 -1 1];b=[0;1;0;0];[RA,RB,n,X]=liezhu(A,b)结果:请注意:因为RA=RB=n,所以此方程组有唯一解。
线性方程组的直接解法

(0) b1 (1)式变为A( 0) x b 则 (0) bn
b( 0)
a 0 0
(0) 11
a
a
(0) 12 (1) 22
(1) an 2
x1 b a x 2 b ( 1 ) b (1) x a nn n n a
2 3 2 n O( n ) 3
Gauss消去法工作量为
回代
求解三角形方程组(2), 得求解公式:
( n 1) b n x ( n 1) n ann n ( k 1) ( k 1) ( b a xj) k kj j k 1 ( k 1) xk a kk
( k- 1) 设akk 0,以第k行为基础, 将以后各行中 ( k- 1) 的aik ( i k 1, , n)化为0.
( k 1) ( k 1) 计算 lik aik / akk (i k 1, ..., n)
10
(0) a1 n (1) a2 n ( k 1) akn ( k 1) ann
2 5 1
0.1000 104 0.2000 10
0.1000104 0
0.1000 10 0.1000 10 r 210 r 0.1000 10 0.3000 10
0.100010 0.2000106 0.100010 0.2000106
(0) 1n (1) 2n
12
将(1)式化为(2)式的过程称为消元过程.
Gauss消去法的消元过程算法
数值分析-线性方程组的直接解法

算法 Gauss(A,a,b,n,x)
1. 消元 For k=1,2, … , n-1 1.1 if akk=0 , stop; 1.2 For i=k+1,k+2, …, n 1.2.1 l ik=aik /akk => aik 1.2.2 For j=k+1,k+2, … ,n ai j -aik ak j =>aij 1.2.3 bi -aik bk=> bi 2. 回代 2.1 bn / an=>xn; 2.2 For i=n-1,n-2, …, 2,1 2.2.1 bk => S 2.2.2 For j=k+1,k+2, … ,n S –akj xj =>S 2.2.3 S/ akk => xk a1 1 a1 2 a13 a2 1 a2 2 a23
线性方程组的直接解法
刘 斌
线性方程组的直接解法
§1 Gauss消去法 1.1 顺序Gauss消去法
1.2
§2 2.1 2.2 2.3
列主元Gauss消去法
Gauss消去法的矩阵运算 Doolittle分解法 平方根法
直接三角分解方法
2.4
追赶法
引入
在科学计算中,经常需要求解含有n个未知量 的n个方程构成的线性方程组 a11 x1 a12 x2 a1n xn b1 a21 x1 a22 x2 a2 n xn b2 (1) an1 x1 an 2 x2 ann xn bn
(1) a12 ( 2) a22 0
(1) (1) a13 a1 n ( 2) ( 2) a23 a2 n ( 3) ( 3) a33 a3 n
0
第5章_线性方程组的解法

k 1
326
0
0
0
a(n) nn
bn(n
)
a1(11)
a(1) 12
a(2) 22
... ... ...
a(1) 1n
a(2) 2n ...
a(n) nn
x1
x2
... xn
bb12((12))
...
bn(n)
回代:
xn
b(n) n
/
a
(n nn
11
3种常用范数:
2-范数(长度)
n
1-范数
x ( 2
xi2 )1/2
i 1
∞-范数
n
x 1
xi
i 1
x
max
1 i n
xi
12
矩阵的范数: 对于给定的n阶方阵A,将比值 Ax / x 的上确界 称为矩阵A的范数
直接由定义知,对于任意向量x,有:|| A x ||≤|| A || || x || 基本性质:
det
a11
an1
a1i1
ani1
b1
bn
a1i1
a1n
ani1 ann
(1)计算n+1个n阶行列式. (计算一个n阶行列式就需要做(n-1)n!次乘法. 要计算n+1个n阶行列式,共 需做(n2-1)n!次乘法). (2)做n次除法才能算出xi(i=1,… n). (3)用此法,需作乘除法的运算: N=(n2-1)n!+n 例如,当n=10(即求解一个含10个未知量的方程组), 次数共为32659210次; 当n=100,1033次/秒的计算机要算10120年
a(1) 13
a(2) 23
解线性方程组直接法
第三章 解线性方程组的直接法3.1 引言许多科学技术问题要归结为解含有多个未知量x 1, x 2, …, x n 的线性方程组。
例如,用最小二乘法求实验数据的曲线拟合问题,三次样条函数问题,解非线性方程组的问题,用差分法或有限元法解常微分方程、偏微分方程的边值等,最后都归结为求解线性代数方程组。
关于线性方程组的数值解法一般有两类:直接法和迭代法。
1. 直接法直接法就是经过有限步算术运算,可求得线性方程组精确解的方法(假设计算过程中没有舍 入误差)。
但实际计算中由于舍入误差的存在和影响,这种方法也只能求得线性方程组的近似解。
本章将阐述这类算法中最基本的高斯消去法及其某些变形。
2. 迭代法迭代法就是用某种极限过程去逐步逼近线性方程组精确解的方法,迭代法需要的计算机存储 单元少、程序设计简单、原始系数矩阵在计算过程中不变,这些都是迭代法的优点;但是存在收敛性和收敛速度的问题。
迭代法适用于解大型的稀疏矩阵方程组。
为了讨论线性方程组的数值解法,需要复习一些基本的矩阵代数知识。
3.1.1 向量和矩阵 用nm ⨯R表示全部n m ⨯实矩阵的向量空间,nm C⨯表示全部n m ⨯复矩阵的向量空间。
此实数排成的矩形表,称为m 行n 列矩阵。
⎪⎪⎪⎪⎪⎭⎫⎝⎛=⇔∈n n x x x 21x R x x 称为n 维列向量矩阵A 也可以写成其中 a i 为A 的第i 列。
同理 其中Ti b 为A 的第i 行。
矩阵的基本运算:(1) 矩阵加法 )( ,n m nm R C ,R B ,R A B A C ⨯⨯⨯∈∈∈+=+=n m ij ij ij b a c .(2) 矩阵与标量的乘法 ij j a ci αα== ,A C(3) 矩阵与矩阵乘法 p nk kj ikb acij ⨯⨯⨯=∈∈∈==∑m p n n m R C ,R B ,R A AB C ( ,1(4) 转置矩阵 ji ij T n m a c ==∈⨯ , ,A C R A (5) 单位矩阵 ()nn ⨯∈=Re ,,e ,e I n 21 ,其中()T k e 0,0,1,0,0 = k=1,2,…,n(6) 非奇异矩阵 设n n ⨯∈R A ,n n ⨯∈R B 。
数值分析小论文线性方程组的直接解法

数值分析小论文线性方程组的直接解法线性方程组的直接解法是指通过一系列的代数运算直接求解线性方程组的解。
线性方程组是数值分析中非常重要的问题,广泛应用于工程、科学、计算机图形学等领域。
在线性方程组的直接解法中,最常用的方法是高斯消元法,它是一种基于矩阵变换的方法。
高斯消元法将线性方程组表示为增广矩阵,并通过一系列的行变换将增广矩阵转化为行阶梯形矩阵,从而得到方程组的解。
高斯消元法的主要步骤包括消元、回代和得到方程组的解。
消元是高斯消元法的第一步,通过一系列的行变换将增广矩阵的元素转化为上三角形式。
在消元过程中,我们首先找到主元素,即矩阵的对角线元素,然后将其它行的元素通过消元操作转化为0,从而使得矩阵逐步变成上三角形矩阵。
回代是高斯消元法的第二步,通过一系列的回代操作求解线性方程组。
回代操作是从上三角形矩阵的最后一行开始,通过依次求解每个未知数的值,最终得到方程组的解。
高斯消元法的优点是算法简单易于实现,可以在有限的步骤内求解线性方程组,适用于一般的线性方程组问题。
但是高斯消元法也存在一些问题,例如当矩阵的主元素为0时,无法进行消元操作,此时需要通过行交换操作来避免这种情况。
另外,高斯消元法对病态矩阵的求解效果较差,容易引起舍入误差累积,导致解的精度下降。
在实际应用中,为了提高求解线性方程组的效率和精度,人们常常使用一些改进的直接解法,例如列主元高斯消元法和LU分解法。
列主元高斯消元法通过选择最大主元来避免主元为0的情况,进一步提高了求解线性方程组的精度。
LU分解法将矩阵表示为两个矩阵的乘积,从而将线性方程组的求解问题转化为两个三角形矩阵的求解问题,提高了求解效率。
综上所述,线性方程组的直接解法是一种基于矩阵变换的方法,通过一系列的代数运算求解线性方程组的解。
高斯消元法是最常用的直接解法之一,它简单易于实现,适用于一般的线性方程组问题。
在实际应用中,可以通过改进的直接解法来进一步提高求解效率和精度。
线性方程组的直接解法程序设计
线性方程组的直接解法程序设计一、高斯消元法高斯消元法是解线性方程组最常用的方法之一、它通过消元和回代的方式,将线性方程组转化为上三角形式,进而求解未知数的值。
程序设计步骤如下:1.读入线性方程组的系数矩阵A和常数向量b;2.进行初等行变换,将系数矩阵A转化为上三角矩阵U,并同时对常数向量b进行相应的变换;3.判断是否有唯一解,如果主对角线上存在零元素,则方程组无解;如果主对角线上所有元素都非零,则方程组有唯一解;4.进行回代计算,求解未知数的值。
高斯消元法的优点是简单直观,容易理解和实现。
但是在一些情况下,会出现主对角线上有零元素的情况,此时需要进行行交换,增加了额外的计算量。
二、LU分解法LU分解法是另一种常用的线性方程组直接解法。
它将系数矩阵A分解为下三角矩阵L和上三角矩阵U的乘积,即A=LU。
程序设计步骤如下:1.读入线性方程组的系数矩阵A和常数向量b;2.进行LU分解,找到下三角矩阵L和上三角矩阵U;3.解第一个方程Ly=b,先求解向前替代方程,计算出y的值;4.解第二个方程Ux=y,再求解向后替代方程,计算出x的值。
LU分解法的优点是可以在多次需要解线性方程组的情况下重复使用LU分解的结果,提高计算效率。
但是LU分解法需要找到L和U的值,增加了额外的计算量。
三、数学实验在进行数学实验时,需要注意以下几点:1.线性方程组的系数矩阵应该是满秩的,以保证方程组有唯一解;2.对于大规模的线性方程组,可以使用稀疏矩阵存储和计算,减少内存和计算时间的消耗;3.在求解过程中,需要判断方程组是否有解,并且考虑特殊情况的处理;4.通过数学实验可以验证直接解法的正确性和有效性,分析计算结果的误差和稳定性。
综上所述,线性方程组的直接解法程序设计在计算方法和数学实验中都是重要的研究内容。
高斯消元法和LU分解法是常用的直接解法,通过编写程序并进行数学实验,可以深入理解和应用这些方法。
这些方法的有效性和稳定性对于解决实际问题具有重要意义。
线性代数方程组的直接解法赖志柱

第二章线性代数方程组的直接解法教学目标:1.了解线性代数方程组的结构、基本理论以及相关解法的发展历程;2.掌握高斯消去法的原理和计算步骤,理解顺序消去法能够实现的条件,并在此基础上理解矩阵的三角分解(即LU分解),能应用高斯消去法熟练计算简单的线性代数方程组;3.在理解高斯消去法的缺点的基础上,掌握有换行步骤的高斯消去法,从而理解和掌握选主元素的高斯消去法,尤其是列主元素消去法的理论和计算步骤,并能灵活的应用于实际中。
教学重点:1. 高斯消去法的原理和计算步骤;2. 顺序消去法能够实现的条件;3. 矩阵的三角分解(即LU分解);4. 列主元素消去法的理论和计算步骤。
教学难点:1. 高斯消去法的原理和计算步骤;2. 矩阵的三角分解(即LU分解);3. 列主元素消去法的理论和计算步骤。
教学方法:教具:引言在自然科学和工程技术中,许多问题的解决常常归结为线性方程组的求解,有的问题的数学模型中虽不直接表现为线性方程组,但它的数值解法中将问题“离散化”或“线性化”为线性方程组。
例如,电学中的网络问题、船体数学放样中建立三次样条函数问题、最小二乘法用于求解实验数据的曲线拟合问题、求解非线性方程组问题、用差分法或有限元法求解常微分方程边值问题及偏微分方程的定解问题,都要导致求解一个或若干个线性方程组的问题。
目前,计算机上解线性方程组的数值方法尽管很多,但归纳起来,大致可以分为两大类:一类是直接法(也称精确解法);另一类是迭代法。
例如线性代数中的Cramer法则就是一种直接法,但其对高阶方程组计算量太大,不是一种实用的算法。
实用的直接法中具有代表性的算法是高斯(Gauss)消元法,其它算法都是它的变形和应用。
在数值计算历史上,直接法和迭代法交替生辉。
一种解法的兴旺与计算机的硬件环境和问题规模是密切相关的。
一般说来,对同等规模的线性方程组,直接法对计算机的要求高于迭代法。
对于中、低阶(200n )以及高阶带形的线性方程组,由于直接法的准确性和可靠性高,一般都用直接法求解。
线性方程组的直接解法
线性方程组的直接解法
线性方程组(linear equation system)是一类几何问题,也是解决线性系统和代数问题的重要方法,线性方程组由多个联立方程组成,这些方程中也可能含有未知量。
直接解法是把数学模型转换为数值模型,并给出实现其解题步骤的算法,它不同于间接求解的方法,既不做任何假设,也不处理不确定性问题,只是简单地直接求解线性方程组。
解线性方程组的直接解法主要分为三种,分别是高斯消元法、列主元消去法和列坐标变换法。
高斯消元法是一种比较常用的方法,主要是把线性方程组的未知量从左到右一步步求出来,其中用到的主要技术是把矩阵中部分元素消去为零,以便求解不定线性方程组的未知量。
而列主元消去法则是以一列为主元,去消除其他联立方程中出现的此列中的变量,从而最终求出其他未知变量的值。
最后,列坐标变换法是将线性方程组转换为一个更有利于求解的矩阵,其中未知量可以直接求得解答。
除了这三种常见方法外,还有一些更特殊的直接解法,比如要解常微分方程的未知函数,可以用拉格朗日方法和分部积分方法,再比如求解雅各比方程的根,可以通过主副方程互解求解,这种方法也叫作特征根法。
综上,解线性方程组的直接解法有高斯消元法、列主元消去法、列坐标变换法等;特殊问题可以采用拉格朗日方法、分部积
分法和特征根法等。
每种方法都有自己的优势,因此在使用时,可以根据问题的特点,选择适合的方法来解决。
第3章 线性方程组求解的直接解法
线性方程组求解的直接法5.2线性方程组直接解法概述直接解法就是利用一系列公式进行有限步计算,直接得到方程组的精确解的方法.当然,实际计算结果仍有误差,譬如舍入误差,而且舍入误差的积累有时甚至会严重影响解的精度.这是一个众所周知的古老方法,但用在计算机上仍然十分有效.求解线性方程组最基本的一种直接法是消去法.消去法的基本思想是,通过将一个方程乘以或除以某个常数,以及将两个方程相加减这两种手段,逐步减少方程中的变元的数目,最终使每个方程仅含一个变元,从而得出所求的解.高斯(Gauss )消去法是其中广泛应用的方法,其求解过程分为消元过程和回代过程两个环节.消元过程将所给的方程组加工成上三角方程组,所归结的方程组再通过回代过程得出它的解.Gauss 消去法由于添加了回代的过程,算法结构稍复杂,但这种改进的算法明显减少了计算量.直接法比较适用于中小型方程组.对高阶方程组,即使系数矩阵是稀疏的,但在运算中很难保持稀疏性,因而有存储量大,程序复杂等不足.5.3直接解法5.3.1Gauss 消去法Gauss 消去法是一个古老的求解线性方程组的方法,由它改进而来的选主元法是目前计算机上常用的有效的求解低阶稠密矩阵线性方程组的方法.例5.1用Gauss 消去法解方程组1231231232221(5.3.1)1324 (5.3.2)2539(5.3.3)2x x x x x x x x x ⎧++=⎪⎪++=⎨⎪++=⎪⎩解〖JP4〗第1步,式35.3.12⨯-()()加到式(5.3.2)上,式()15.3.1()2⨯-加到式(5.3.3)上,得到等价方程组123232322211(5.4.4)282(5.4.5)x x x x x x x ⎧++=⎪⎪-+=-⎨⎪⎪+=⎩第2步,式()2⨯5.3.4加到式(5.3.5)上得等价的方程组12323322211100(5.3.6)x x x x x x ++=⎧⎪-+=-⎨⎪=⎩第3步,回代法求解方程组(5.3.6),即可求得该方程组的解为32110,1,.2x x x ===-.用矩阵描述其约化过程即为233(2)22221011100100r r r ⨯+⇒⎡⎤⎢⎥--⎢⎥⎢⎥⎣⎦→[]122133(1)3()21()222212221,3241/201111395/20282r r r r r r A b ⨯-+⇒⨯-+⇒⎡⎤⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦→.这种求解过程称为具有回代的Gauss 消去法.由此例可见,Gauss 消去法的基本思想是:用矩阵的初等行变换将系数矩阵A 化为具有简单形式的矩阵(如上三角阵、单位矩阵等),而三角形方程组是很容易回代求解的.一般地,设有n 个未知数的线性方程组为11112211211222221122n n n n n n nn n na x a x a xb a x a x a x b a x a x a x b +++=⎧⎪+++=⎪⎨⎪⎪++=⎩L L MM M L (5.3.7)1212)(,,)(,,)T T ij n n n n A a X x x x b b b b ⨯===L L (,,,则方程组(5.3.7)化为AX b =.方便起见,记()(1)det 0A AA ==≠,(1)b b =,且()1A的元素记为()()11,ij a b ,的元素记为()1i b ,则消去法的步骤如下:第1步:1110a≠(),,计算(1)11(1)11(2,3,4),i i a m i n a ==L 用()1i m -乘方程组(5.3.7)中的第1个方程加到第i个方程中()2,3,i n =L ,即进行行初等变换()112,3,i i i R m R R i n -⋅→=L ,消去第2个到第n个方程中的未知数1,x ,得等价方程组111121(2)(2)(2)22222(2)(2)(2)2inn n n nn n x a a b x a a b ⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦LMM LM M L (5.3.8)记为(2)(2)A X b =,其中(2)(1)(1)(2)(1)(1)1111(,2,3),2,3,ij ij i j i i i a a m a i j n b b m b i n =-==-=L L ,,第k 步()1,2,1k n =-L:继续上述消元过程.第1步到第1k -步计算已完成,且得到与原方程组等价的方程组(1)(1)(1)(1)1112111(2)(2)(2)222223()()()()()()nn k k k kkkn k n k k k nk nn n a a a b x a a b xx aa b x a a b ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦L L LLOM L M MMM L(5.3.9)记为()(()K k A X b =,进行第k 步消元:设()0k kka≠,计算乘数()()(1,)k ikk ik kka m k k n a ==+L ,用ik m -乘方程组(5.3.9)中第k 个方程加到第i 1)i k n =+L (,,,个方程上消去方程组(5.3.9)中第i 1)i k n =+L (,,个方程的未知数k x ,得到与原方程组等价的方程组:(1)()()(1)()()(1)(1)()(,1,)( 1.)k k k ij ij ik kj k k k i i ik k k k k k a a m a i j k n b b m b i k n A A k b b k ++++⎧=-=+⎪=-=+⎨⎪⎩L L ()与前行元素相同,与前个元素相同 (5.3.10) 记为(1)(1)k k A X b ++=其中(1)(1,k k A b ++)中元素计算公式为(1)()()(1)()()(1)(1)()(,1,)( 1.)k k k ij ij ik kj k k k i i ik k k k k k a a m a i j k n b b m b i k n A A k b b k ++++⎧=-=+⎪=-=+⎨⎪⎩L L ()与前行元素相同,与前个元素相同 (5.3.11)重复上述过程,且设()0(1,2,1)k kk a k n ≠=-L ,共完成1n -步消元计算,得到与方程组(5.3.7)等价的三角形方程组1111211(2)(2)(2)22222()()n n n n n nn n x a a b x a b ⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦LMOM M (5.3.12)再用回代法求方程组(5.3.12)的解,计算公式为()()()()1()(),(1,2,1)n n n nn n i i i ij j j i i i ii b x a b a x x i n n a =+⎧=⎪⎪⎨-⎪==--⎪⎩∑L (5.3.13)元素()k kka 称为约化的主元素.将方程组(5.3.7)化为方程组(5.3.12)的过程称为消元过程.方程组(5.3.12)的求解过程(5.3.13)称为回代过程.由消元过程和回代过程求解线性方程组的方法称为Gauss 消去法.定理5.1(Gauss 消去法)设AX b =。
线性方程组直接解 优质课件

a11
a1i
D1 a11 0, Di ai1
0, i 1, 2, , n aii
推论:
a(1) 11
D1,
a(i) ii
Di
Di1 ,
i 2,
,n
23:35:57
Numerical Analysis
13
运算量
计算机中做乘除运算的时间远远超过做加减运算时间,
故我们只估计 乘除运算 的次数
a(2) 22
a(1) 1n
a(2) 2n
x1 x2
b(1) 1
b(2) 2
a(n) nn
xn
bn(n)
回代求解:
xn
b(n) n
a(n) nn
( ) n
xi
b(i) i
a(i) ij
x
j
a(i) ii
Numerical Analysis
17
列主元 Gauss 消去法
Gauss 消去法有效的条件是: 主元全不为零
例:解线性方程组
0 1
1 0
x1 x2
1 1
列主元 Gauss 消去法
在第 k 步消元时,在第 k 列的剩余部分选取主元
①
先选取列主元: |
20
全主元Gauss消去法
全主元高斯消去法:
第 k 步消元时,在剩余的 n-k 阶子矩阵中选取主元
①
先选取全主元:|
a(k) ik jk
|
=
解线性方程组的直接方法

解线性方程组的直接方法一、高斯消元法高斯消元法是解线性方程组的一种常用且直接的方法。
它的基本思想是通过一系列的代数运算,将方程组化为一个三角方程组,然后从最后一行开始,逐步回代求解未知数。
下面以一个二元一次方程组为例,说明高斯消元法的具体步骤:例如,给定方程组:a₁₁x₁+a₁₂x₂=b₁a₂₁x₁+a₂₂x₂=b₂其中,a₁₁,a₁₂,a₂₁,a₂₂,b₁,b₂为已知系数。
1.检查a₁₁的值是否为0,若为0则交换第一行与非零行。
2.将第一行的每个元素除以a₁₁,使a₁₁成为13.将第一行乘以(-a₂₁)并加到第二行上,使第二行的第一个元素变为0。
4.引入一个新的未知数y₂=a₂₁x₁+a₂₂x₂,并代入第二行,化简方程组。
5.使用回代法求解方程组。
高斯消元法的优势在于其直接的解题思路和较高的计算精度,但是其缺点是计算复杂度较高,对于大规模的方程组不太适用。
二、逆矩阵法逆矩阵法是解线性方程组的另一种直接方法,它通过求解方程组的系数矩阵的逆矩阵,并将其与方程组的常数向量相乘,得到方程组的解向量。
下面以一个三元一次方程组为例,说明逆矩阵法的具体步骤:例如,给定方程组:a₁₁x₁+a₁₂x₂+a₁₃x₃=b₁a₂₁x₁+a₂₂x₂+a₂₃x₃=b₂a₃₁x₁+a₃₂x₂+a₃₃x₃=b₃其中,a₁₁,a₁₂,a₁₃,a₂₁,a₂₂,a₂₃,a₃₁,a₃₂,a₃₃,b₁,b₂,b₃为已知系数。
1.计算系数矩阵A的行列式D=,A。
2. 求解系数矩阵A的伴随矩阵Adj(A)。
3. 计算逆矩阵A⁻¹=Adj(A)/D。
4.将常数向量b用列向量表示。
5.计算解向量x=A⁻¹b。
逆矩阵法的优势在于其求解过程相对简单,计算量较小,并且不需要对系数矩阵进行消元操作。
但是逆矩阵法的限制在于当系数矩阵不可逆时无法使用。
三、克莱姆法则克莱姆法则是解线性方程组的另一种直接方法,它通过定义克莱姆行列式和克莱姆向量,利用行列式的性质求解方程组的解向量。
线性方程组直接法

练习 利用LU分解法求解方程组
1 2 3 x1 2 1 3 5 x2 4. 1 3 6 x3 5
1001 2 3 2 1 答L: U 110 01 2 , y 2 ,x 0 .
111 001 1 1
二、解三对角方程组的追赶法
在数值求解常微分方程边值问题、热传导方程和建立
二、向量和矩阵的范数
定义1 ( 向量范数) x 和 y 是 Rn 中的任意向量 , 向量范数‖•‖是定义
在 Rn上的实值函数, 它满足:
(1) ‖ x ‖≥0, 并且当且仅当 x=0 时, ‖ x ‖=0;
(2) ‖k x ‖=|k| ‖ x ‖, k 是一个实数;
(3) ‖ x + y ‖≤ ‖ x ‖+ ‖ y ‖
1 0 01 2 3
A 2 3
1 5
0 0 1 0
1 0
4
24
LU
3=-72/-24; 2=[-10+4*3]/1;
求解
1=[14-(2*2+3*3)]/1]
Ly (14, 18, 20)T , 得y (14, 10,72)T 同理当 ukk 0或 Ux (14, 10, 72)T , 得x (1, 2, 3)T 很小时,可用
子式 Di 0(i 1,2,,k),即
a11 Di
ai1
a1i
aii
0aa1i((i1i1))
0 Di
Di1 0
由于高斯消去法过在程消中元可能ak(出 kk) 现 0的情况, 这时消去法将无;法即进使行主a元 k(kk) 素0但很小时, 用其作除数,会他导元致素其数量级的长严和重舍增
入误差的扩散,使最得后计也算的解不可靠。
线性方程组直接解法共57页文档

▪
27、只有把抱怨环境的心情,化为上进的力量,才是成功的保证。——罗曼·罗兰
▪
28、知之者不如好之者,好之者不如乐之者。——孔子
▪
29、勇猛、大胆和坚定的决心能够抵得上武器的精良。——达·芬奇
▪
30、意志是一个强壮的盲人,倚靠在明眼的跛子肩上。——叔本华
谢谢!
57
线性方程组直接解法
36、“不可能”这个字(法语是一个字 ),只 在愚人 的字典 中找得 到。--拿 破仑。 37、不要生气要争气,不要看破要突 破,不 要嫉妒 要欣赏 ,不要 托延要 积极, 不要心 动要行 动。 38、勤奋,机会,乐观是成功的三要 素。(注 意:传 统观念 认为勤 奋和机 会是成 功的要 素,但 是经过 统计学 和成功 人士的 分析得 出,乐 观是成 功的第 三要素 。
39、没有不老的誓言,没有不变的承 诺,踏 上旅途 ,义无 反顾。 40、对时间的价值没有没有深切认识 的人, 决不会 坚韧勤 勉。
▪
ห้องสมุดไป่ตู้
26、要使整个人生都过得舒适、愉快,这是不可能的,因为人类必须具备一种能应付逆境的态度。——卢梭
数值分析复习题答案

数值分析复习题一、填空Chapterl 绪论近似数x*=0.4231关于真值x=0.4229有3 位有效数字.用1000.1近似真值1000时,其有效数字有4 位,已知准确值X*与其有t位有效数字的近似值兀=°“冬…6 xlO' (q H 0)的绝对误差为|x*-x| <^-xlO J_/设F = 2.40315是真值x = 2.40194的近似值,则F有3位有效数字。
J_xl0-4 = -xl0-4设一近似数x*=2.5231具有5位有效数字,则其相对误差限是2x2 4,其-xlO-4绝对误差限是2 oyJx+l — \/x = / --- 7=当X很大时,为防止损失有效数字,应该使V A +1+V.VChapter2插值方法设几丫) = 3十 + 6〒一5亍+ 1,则亢—3,-2,- 1,0丄2,3]= 3。
若f(x) = 2x4+x~ ・3,则f[l,2,3,4,5,6] = °对f(x)=x3+3x2-x+5 商f[0J ,2,3,4]= 0 .设/⑴二十一3疋+疋一5,则差商/[0丄2,3,4,5,6]= }已知尸f(x)的均差 /[ v o^2,x i] = 5 , /[兀,兀入]=9,幷x4, x3, x2]=14, ffxO, x3, x2]=8,.那么均差f{x4, x2, x0]= 9 o (交换不变性)x -1 1 2设有数据,° 3 2则其2次Laiange插值多项式为-3 2——(x + l)(x 一2) + —(x+l)(x -1)2 3 , 2次拟合多项式为(最佳平方逼近可求)。
???以n + 1个整数点k (k =0JZ…,n)为节点的Lagrange插值基函数为y则有拉格朗口插值公式: (k=0丄2,…则k・o ??(注:(x) = ^y k l k (x) k-0科特斯公式满足)? ?i3 11f(x)dx = -f(-) + -f(l)姒诅卒协公八'434的代数精度为:2次代数精度° (依次将函数l,x,x',…代入验证是否满足,可得代数精度)「f\x)clx Q 丄[2/(丄)-/(-) + 2/(-)] 求积公式3 4 24」的代数精度为:3次代数精度。
数值分析实验报告
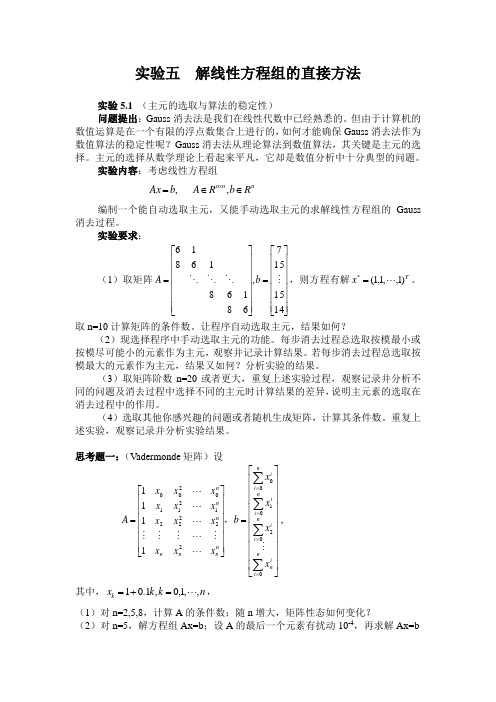
实验五 解线性方程组的直接方法实验5.1 (主元的选取与算法的稳定性)问题提出:Gauss 消去法是我们在线性代数中已经熟悉的。
但由于计算机的数值运算是在一个有限的浮点数集合上进行的,如何才能确保Gauss 消去法作为数值算法的稳定性呢?Gauss 消去法从理论算法到数值算法,其关键是主元的选择。
主元的选择从数学理论上看起来平凡,它却是数值分析中十分典型的问题。
实验内容:考虑线性方程组n n n R b R A b Ax ∈∈=⨯,,编制一个能自动选取主元,又能手动选取主元的求解线性方程组的Gauss 消去过程。
实验要求:(1)取矩阵⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=1415157,6816816816 b A ,则方程有解T x )1,,1,1(* =。
取n=10计算矩阵的条件数。
让程序自动选取主元,结果如何?(2)现选择程序中手动选取主元的功能。
每步消去过程总选取按模最小或按模尽可能小的元素作为主元,观察并记录计算结果。
若每步消去过程总选取按模最大的元素作为主元,结果又如何?分析实验的结果。
(3)取矩阵阶数n=20或者更大,重复上述实验过程,观察记录并分析不同的问题及消去过程中选择不同的主元时计算结果的差异,说明主元素的选取在消去过程中的作用。
(4)选取其他你感兴趣的问题或者随机生成矩阵,计算其条件数。
重复上述实验,观察记录并分析实验结果。
思考题一:(Vadermonde 矩阵)设⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡=∑∑∑∑====n i i n n i i ni i n i i n n n n n n nx x x x b x x x x x x x x x x x x A 002010022222121102001111 ,, 其中,n k k x k ,,1,0,1.01 =+=,(1)对n=2,5,8,计算A 的条件数;随n 增大,矩阵性态如何变化?(2)对n=5,解方程组Ax=b ;设A 的最后一个元素有扰动10-4,再求解Ax=b(3)计算(2)扰动相对误差与解的相对偏差,分析它们与条件数的关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验五 线性方程组的直接解法
一、实验内容
1、用列主元素法求解方程组
15
123459.170.31059.43
146.785.291
6.3112111.295221211x x x x -⎡⎤⨯⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦ 并计算误差b-Ax
,分析结果的好坏;
2、 用改进Cholesky 方法求对称正定阵线性方程组 1234248.72171013.741090.7x x x -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥-=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣
⎦
并计算误差b-Ax ,分析结果的好坏;
3、 用追赶法解方程组 123421006132010121000351x x x x -⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦
⎣⎦ 二、要求
1、 对上述三个方程组分别利用Gauss 列主元消去法;Cholesky 方法;追赶法求解(选择其一);
2、 应用结构程序设计编出通用程序;
3、 比较计算结果,分析数值解误差的原因;
三、目的和意义
1、通过该课题的实验,体会模块化结构程序设计方法的优点;
2、运用所学的计算方法,解决各类线性方程组的直接算法;
3、提高分析和解决问题的能力,做到学以致用;
4、 通过三对角形线性方程组的解法,体会稀疏线性方程组解法的特点。
四、实验学时:2学时
五、实验步骤:
1.进入matlab 开发环境;
2.根据实验内容和要求编写程序;
3.调试程序;
4.运行程序;
5.撰写报告,讨论分析实验结果.
六、程序
1、Gauss列主元素消去法
function x=Gauss_pivot(A,b)
%用Gauss列主元素法求解线性方程组Ax=b
%x是未知向量
n=length(b);
x=zeros(n,1);
c=zeros(1,n);
d1=0;
%消元计算
for i=1:n-1
max=abs(A(i,i));
m=i;
for j=i+1:n
if max<abs(A(j,i));
max=abs(A(j,i));
m=j;
end
end
if m~=i
for k=i:n
c(k)=A(i,k);
A(i,k)=A(m,k);
A(m,k)=c(k);
end
d1=b(i);
b(i)=b(m);
b(m)=d1;
end
for k=i+1:n
for j=i+1:n
A(k,j)=A(k,j)-A(i,j)*A(k,i)/A(i,i);
end
b(k)=b(k)-b(i)*A(k,i)/A(i,i);
A(k,i)=0;
end
end
%回代求解
x(n)=b(n)/A(n,n);
for i=n-1:-1:1
sum=0;
for j=i+1:n
sum=sum+A(i,j)*x(j);
end
x(i)=(b(i)-sum)/A(i,i);
end
2、Cholesky方法
function x=Chol_decompose(A,b)
%用cholesky求解线性方程组Ax=b
%A是对称矩阵
%L是单位下三角阵
%D是对角阵
%对角矩阵A进行三角分解:A=LDL'
N=length(A);
L=zeros(N,N);D=zeros(1,N);
for i=1:N
L(i,i)=1;
end
D(1)=A(1,1);
for i=2:N
for j=1:i-1
if j==1
L(i,j)=A(i,j)/D(j);
else
sum1=0;
for k=1:j-1
sum1=sum1+L(i,k)*D(k)*L(j,k);
end
L(i,j)=(A(i,j)-sum1)/D(j);
end
end
sum2=0;
for k=1:i-1
sum2=sum2+L(i,k)^2*D(k);
end
D(i)=A(i,i)-sum2;
end
%分别求线性方程组Ly=b;L'x=y/D
y=zeros(1,N);
y(1)=b(1);
for i=2:N
sumi=0;
for k=1:i-1
sumi=sumi+L(i,k)*y(k);
end
y(i)=b(i)-sumi;
end
x=zeros(1,N);
x(N)=y(N)/D(N);
for i=N-1:-1:1
sumi=0;
for k=i+1:N
sumi=sumi+L(k,i)*x(k);
end
x(i)=y(i)/D(i)-sumi;
end
3、追赶法
function x=threedia(a,b,c,f)
%求解线性方程组Ax=f,其中A是三对角阵
%a是矩阵A的下对角线元素a(1)=0
%b是矩阵A的对角线元素
%c是矩阵A的上对角线元素c(N)=0
%f是方程组的右端向量
N=length(f);
x=zeros(1,N);y=zeros(1,N);
d=zeros(1,N);u=zeros(1,N);
%预处理
d(1)=b(1);
for i=1:N-1
u(i)=c(i)/d(i);
d(i+1)=b(i+1)-a(i+1)*u(i); % u在这里表示就是公式中的 end
%追的过程
y(1)=f(1)/d(1);
for i=2:N
y(i)=(f(i)-a(i)*y(i-1))/d(i);
end
%赶的过程
x(N)=y(N);
for i=N-1:-1:1
x(i)=y(i)-u(i)*x(i+1);
end
x
七、数值实验
1、第1题运行程序
A=[0.3*^10-15,59.14,3,1;5.291,-6.13,-1,2;11.2,9,5,2;1,2,1,1];
b=[59.17,46.78,1,2];
x=Gauss_pivot(A,b);
b-A*x
2、第2题运行程序
A=[4,-2,4;-2,17,10;4,10,9];
b=[8.7,13.7,-0.7];
x=Chol_decompose(A,b);
3、第3题运行程序
a=[0,-1,-1,-3];
b=[2,3,2,5];
c=[-1,-2,-1,0];
f=[6,1,0,1];
x=threedia(a,b,c,f)
八、思考题
根据高斯列主元素消去法写出高斯消去法的程序,用高斯消去法解算第1题,数值结果与高斯列主元消去法进行比较优缺点。