工程力学第三章
工程力学 第3章 力偶系
M 2 F2 , F2'
M F1'
r1
F F1 F2 F ' F1' F2'
F2' MR F, F '
F2
F1 F
M2
MR r F ' r (F1'F2 ') r F1'r F2 '
M1 M2
结论:两个力偶的合成仍然为力偶,且
第三章 力偶系
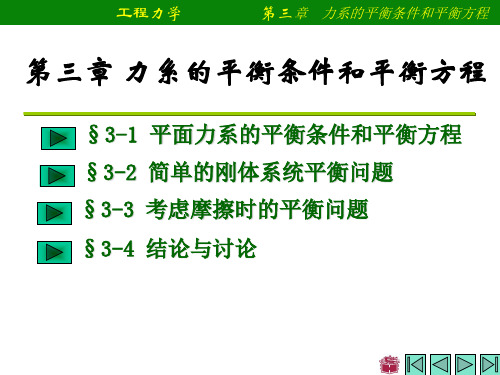
§1 力对点之矩矢 一、 平面力对点之矩(回顾)
力使物体绕某点转动的力学效应,称为力对该点之矩。 例如扳手旋转螺母。
BF
dA L
O
力F对O点之矩定义为: Mo(F)=±Fd
通常规定:力使物体绕矩心逆时针方向转动时,力矩 为正,反之为负。
第三章 力偶系
二、力对点之矩矢量 1、空间力矩三个要素:
一、力偶 在日常生活和工程实际中经常见到物体受动两个大小相等、 方向相反,但不在同一直线上的两个平行力作用的情况。例如
第三章 力偶系
B d
F’
F A
M
B
F
rBA
F’ d A
1. 定义:在力学中把这样一对等值、反向而不共线的平行力 称为力偶,用符号 ( F , F′)表示。
两个力作用线之间的垂直距离 d 称为力偶臂, 两个力作用线所决定的平面称为力偶的作用面。
x (F ) y (F )
yFz zFx
zFy xFz
M
z
(F
)
xFy
yFx
力对点之矩在各坐标轴上的投影
MO z
O xr
工程力学(第三章)

MR
y
MR Mz cos MR
§3-6
力偶系的平衡条件
M 0
平衡: 力偶系平衡的充要条件是 其合力偶矩矢为零。
即:力偶系平衡
一、平面力偶系的平衡条件
M R M(代数和) i
M 0
平面力偶系的平衡方程
§3-6
力偶系的平衡条件
M 0
平衡: 力偶系平衡的充要条件是 其合力偶矩矢为零。
力对点之矩矢
作用: 用来度量力使物体绕某点转动效应的量。
(代数量) 一、平面中力对点之矩(力矩)
F
O
h
定义:M O
F Fh
正负号规定: 力使物体绕矩心逆转为正,顺转为负。
作用: 用来度量力使物体绕某点转动效应的量。 1、平面问题
(代数量) 力矩作用面
矩心 O h
力臂
定义: M O F Fh
A
O x
y
Fx
z
y
Fy
x
A x, y, z ,
F Fx , Fy , Fz
(一)、力对点的矩
1、平面问题
MO
F Fh
MO F
O
h
z
F
F
2、空间问题
MO F r F
x
(二)、力对轴的矩
空间: 力偶对空间任一点的矩矢恒等于力偶矩矢, 而与矩心位置无关。
性质二 力偶可在其作用面内任意移转,或移到另
一平行平面,而不改变对刚体的作用效应。
= =
F
F
F
F
工程力学-第3章

TSINGHUA UNIVERSITY A
C
B C
FR
但是由于 A 、 B 、 C 三点不共线, 所以力系也不可能简化为一合力。 因此,样满足上述方程的平面力系 只可能是一平衡力系。
平面力系的平衡条件与平衡方程
平面一般力系平衡方程的其他形式-例题 3
例题3 l/2 l/2
A 45° D
TSINGHUA UNIVERSITY
平面力系的平衡条件与平衡方程
平面一般力系的平衡条件与平衡方程
例题2
A 端固定的悬臂梁 AB 受力如 图示。梁的全长上作用有集度为 q 的均布载荷;自由端B处承受一集 中力和一力偶 M 的作用。已知 FP =ql,M=ql2;l为梁的长度。试求 固定端处的约束力。 求:固定端处的约束力。
TSINGHUA UNIVERSITY
平面力系的平衡条件与平衡方程
平面一般力系的平衡条件与平衡方程
悬臂式吊车结构中AB为吊车大梁, BC 为钢索, A 、处为固定铰链支座, B 处为铰链约束。已知起重电动电动 机 E 与重物的总重力为 FP( 因为两滑轮 之间的距离很小, FP 可视为集中力作 用在大梁上),梁的重力为FQ。已知角 度θ=30º 。
B A A、B 连线 不垂直于x 轴
FR
TSINGHUA UNIVERSITY
这是因为,当上述3个方程中 的第二式和第三式同时满足时,力 系不可能简化为一力偶,只可能简 化为通过AB两点的一合力或者是平 衡力系。 但是,当第一式同时成立时, 而且AB与x轴不垂直,力系便不可 能简化为一合力FR,否则,力系中 所有的力在x轴上投影的代数和不可 能等于零。因此原力系必然为平衡 力系。
l/2 FP B
《工程力学:第三章-力系的平衡条件和平衡方程》解析
工程力学 1. 选择研究对象。以吊车大梁 AB为研究对象,进行受力分析 (如图所示) 2.建立平衡方程
第三章 力系的平衡条件和平衡方程
FAX FTB cos 0 Fy 0
F
x
0
: (1)
M
FAy FQ FP FTB sin 0
A
(F ) 0
工程力学
第三章 力系的平衡条件和平衡方程
§3.3 考虑摩擦时的平衡问题
3.3.1 滑动摩擦定律
概念:
静摩擦力:F 最大静摩擦力:Fmax 滑动摩擦力: Fd
静摩擦因数:
水平拉力: Fp
Fmax f s FN
fs
工程力学
第三章 力系的平衡条件和平衡方程
3.3.2 考虑摩擦时构件的平衡问题
考虑摩擦力时与不考虑摩擦力时的平衡 解题方法和过程基本相同, 但是要注意摩擦力的方向与运动趋势方向相反;且在滑动之前摩擦 力不是一个定值,而是在一定范围内取值。
l l sin 0
(3)
工程力学
第三章 力系的平衡条件和平衡方程
• 联立方程(1)(2)(3)得:
FAX
FQ FP 3 l x 2
(2)由FTB结果可以看出,当x=L时,即当电动机移动到大梁右 端B点时,钢索所受的拉力最大,最大值为
非静定问题:未知数的数目多于等于独立的平衡方程的数目,不能 解出所有未知量。相应的结构为非静定结构或超静定结构。
会判断静定问题和非静定问题
工程力学
第三章 力系的平衡条件和平衡方程
工程力学
第三章 力系的平衡条件和平衡方程
3.2.2 刚体系统平衡问题的特点与解法
1.整体平衡与局部平衡的概念 系统如果整体是平衡的,则组成系统的每一个局部以及每一个 2.研究对象有多种选择 刚体也必然是平衡的。
工程力学第三章总结

第三章力系的平衡3—1平衡与平衡条件3—1—1平衡的概念概念:物体静止或做等速直线平移运动,这种状态称为平衡。
3—1—2平衡的充要条件力系的平衡是刚体和刚体系统平衡的充要条件力系平衡:力系的主矢和力系对任意一点的主距都等于零F R =∑=n i Fi 1=0 M o=∑=ni MoFi 1=03—2任意力系的平衡方程3—2—1平衡方程的一般形式∑Fx =0,)(F Mx ∑=0 ∑=0Fy ,∑=0)(F My ∑=0Fz ,∑=0)(F Mz3—2—2空间力系的特殊情况一个力通过距心,力到该点的力矩为零。
空间汇交力系交与点O ,平衡方程:∑=0Fx ,∑=0Fy ,∑=0Fz 空间力偶系的平衡方程:∑=0Mx ,∑=0My ,∑=0Mz 3—3平衡力系的平衡方程3—3—1平衡力系平衡方程的一般形式平面任意力系:所有的作用线都位于同一平面的力系。
两投影一距式:∑=0Fx ,∑=0Fy ,∑=0)(F Mo3—3—2平衡力系平衡方程的其他形式 一投影二距式:∑=0Fx ,∑=0)(F MA ,∑=0)(F MB ;(条件:x 轴不垂直AB 的连线)。
三距式:∑=0)(F MA ,∑=0)(F MB ,∑=0)(F MZ ;(条件:A ,B ,C 三点不在同一条直线上)。
3—4平衡方程的应用3—5静定和超静定问题的概念静定问题:未知力的个数正好等于独立平衡方程的数目,由平衡方程可以解出全部的未知数。
超静定问题:仅由静力学平衡方程无法求得全部未知约束力。
超静定次数:未知量的个数为Nr与独立平衡方程的数目Ne之差。
i=Nr—Ne3—6简单的刚体系统平衡问题刚体系统:由两个或两个以上的刚体所组成的系统。
刚体系统平衡的特点:仅仅考察系统的整体或某个局部,不能确定全部未知力。
3—7结论与讨论3—7—1受力分析的重要性3—7—2求解刚体系统平衡问题需要注意的几个问题✧理解掌握“力系整体平衡,组成系统的每个局部必然平衡。
工程力学第三章-力系的平衡

将上式两边向x、y、z 轴投影,可得平衡方程
F F F
可以求解3个未知量。
x y
z
0 0 0
• 2.平面汇交力系
力系的平衡
• 力偶系的平衡方程 • 1.空间力偶系
平衡的充要条件(几何条件) M Mi 0 将上式两边向x、y、z 轴投影,可得平衡方程
M M M
可以求解3个未知量。
ix iy iz
0 0 0
• 2.平面力偶系
力系的平衡
• 平衡的充要条件:力偶系中各力偶矩的代数和等于零.
m 0
i
• 任意力系的平衡方程 空间任意力系: • 平衡的充要条件:力系的主矢和对任一点的主矩均为零。
FR 0
MO 0
G3 a
e
G 3(a b) FNAb G1e G 2L 0 G 3(a b) G1e G 2L FNA 2 b
由(1)、(2)式 得:
G1 G2 L
G1e G 2L G3 ab
3
A FN A b
B FN B
(2)空载时
不翻倒条件:FNB≥0 (4) 由 mA 0 得:
FAB = 45 kN
600
y B TBC 15 15 30 TBD
0 0 0
x
C
D
150
B
300
TBD=G E
A
E
FAB G
解题技巧及说明:
1、一般地,对于只受三个力作用的物体,且角度特殊时用 几 何法(解力三角形)比较简便。 2、一般对于受多个力作用的物体,且角度不特殊或特殊, 都用解析法。 3、投影轴常选择与未知力垂直,最好使每个方程中只有一 个未知数。
工程力学第三章

2.多个力偶的合成 =
=
如同右图
FR Fi
i 1
n 有 M R M1 M 2 M n M i
M R 为合力偶矩矢,等于各分力偶矩矢的矢量和.
合力偶矩矢的解析表达式:
M R M Rx i M Ry j M Rz k
例1: 已知:F , l , a,
求: x M
F ,My F ,Mz F
解:把力
F 分解如图
Mx
F F l a cos
My
F Fl cos
M z F F l sin
xC r sin 300 , yC r cos 300 , zC h
三、力偶的性质 1.力偶在任意坐标轴上的投影等于零,力偶没有合 力,力偶不能用一个力来平衡,力偶只能由力偶来 平衡.力和力偶是静力学的两个基本要素。 2.力偶对任意点取矩都等于力偶矩矢,不因矩心的改 变而改变。
力偶矩矢 M rBA F
3.只要保持力偶矩矢不变,力偶可在其作用面内任 意移转,且可以同时改变力偶中力的大小与力偶臂 的长短,对刚体的作用效果不变.
力偶系
第三章 力偶系
§3-1 力对点之矩矢与力对轴之矩
§3-2 力偶
§3-3 力偶系的合成与平衡条件
§3-1 力对点之矩矢与力对轴之矩
一、平面中力对点之矩(力矩)
1.基本概念 矩心:O 力臂:h 力矩作用面 2.两个要素: (1)大小:力与力臂的乘积 (2)方向:转动方向
3.表示形式
M O F Fh M O F 2OAB
工程力学第三章

如图3-8(a),在同一平面内作用两个力偶(F1,F′1)和(F2, F′2),其力偶臂分别为d1、d2,两个力偶的矩分别为M1、M2。
M1=F1d1 M2=-F2d2 保持力偶不变的情况下同时改变力的大小和力偶臂的长短,使 两个力偶的力偶臂均为d,如图3-8(b)所示。 M1 M2 , F4 根据推论1和推论2可得: F3 d d
二、平面力对点的矩 如图3-1 所示,平面上一作用力F,在 同一平面内任取一点O,点O称为矩 心; 点O到力F的作用线的垂直距离h 称为力臂。
平面力对点的矩的定义为: 平面力对点的矩是一代数量,其绝 对值等于力的大小与力臂的乘积。 其正负号规定为: 力使物体绕矩心作逆时针转动时力矩为正, 反之为负。用MO(F)表示。 MO(F)=F· h 三、合力矩定理
解题说明:
求解平面力偶问题时,在已知一个力的方向时,可以利用力 偶的定义,确定另一个与已知力组成力偶的未知力的方向。
例3-2:圆弧杆AB与直角杆BCD在B处铰接,A、D处均为固 定铰链支座,如图3-11(a)所示。若已知r、M,并不计各 杆的自重,求A、D处的约束力。 解: (1)选取研究对象: 杆BCD为二力杆。分析 得,杆BCD受力如图3-11 (b)所示 再以杆AB为研究对象。 分析得,杆AB受力如图3-11(c)所示
M Mi
i 2
n
(3-3)
三、平面力偶系的平衡条件
平面力偶系平衡的充要条件:平面力偶系中各力偶矩的代数 和为零。
M
i 1
n
i
0
(3-4)
上式为平面力偶系的平衡方程。
例3-1:如图3-9(a)、图3-9(b)所示,已知长为l的梁AB 上作用一矩为M的力偶,不计梁的自重。求支座A、B的约 束力。 解: (1)以梁AB为研究对象 分析得,梁AB受力如图 3-10所示
工程力学第3章

1第三章力系的平衡§3–1 平面力系的平衡方程§3–2 空间力系的平衡方程§3–3 物体系统的平衡方程§3–4 静定与静不定的基本概念§3-1 平面力系的平衡方程由于=0 为力平衡M O =0 为力偶也平衡所以平面任意力系平衡的充要条件为:力系的主矢F R 和主矩M O 都等于零,即:)()(22=+=∑∑Y X F R 0)(==∑i O O F m M 1、平面任意力系的平衡方程R F=∑X 0)(=∑i A F m 0)(=∑i B F m ②二矩式条件:x 轴不AB连线⊥0)(=∑i A F m 0)(=∑i B F m 0)(=∑i C F m ③三矩式条件:A ,B ,C 不在同一直线上上式有三个独立方程,只能求出三个未知数。
=∑X 0=∑Y 0)(=∑i O F m ①一矩式①平面汇交力系=∑xF 0=∑yF2、平面特殊力系的平衡方程②平面力偶系=∑M ③平面平行力系=∑y F 0)(=∑F M O 0)(=∑F MB0)(=∑F M A AB 不x 轴⊥[例] 已知:P , a , 求:A 、B 两点的支座反力?解:①选AB 梁研究②画受力图(以后注明解除约束,可把支反力直接画在整体结构的原图上))(=∑i A F m 由32 ,032PN a N a P B B =∴=⋅+⋅-0=∑X 0=A X 0=∑Y 3,0PY P N Y A B B =∴=-+解除约束,0==∑A X X 由022;0)(=⋅-+⋅⋅+⋅=∑a P m aa q a R F m B A 0=∑Y 0=--+∴P qa R Y B A )kN (122028.01628.02022=⨯+-⨯-=+--=P a m qa R B )kN (24128.02020=-⨯+=-+=B A R qa P Y [例] 已知:P =20kN, m =16kN·m, q =20kN/m, a =0.8m求:A 、B 的支反力。
工程力学 第三章

(2)如果力系的主矢、主矩都不等于零,即 FR 0,MO 0 则力系简化的结果为一个力和一个力偶,根据力的平行定理的逆定理可知,主矢和主矩可合成为一个合力。
解:该力系向 O 点简化后的主矢为: FRx F1 cos 45 F2 F4 150 N FRy F1 sin 45 F3 0
该力系对简化中心 O 的主矩为: MO F1 sin 45 20 F2 30 F3 50 F1 cos 45 20 F4 30 M
(1) FR 0,MO 0 ; (3) FR 0,MO 0 ;
(2) FR 0,MO 0 ; (4) FR 0,MO 0 。
3.2.1 平面任意力系简化为一个力偶的情形
如果力系的主矢等于零,而力系对于简化中心的主矩不等于零,则原力系向简化中心等效 平移后的汇交力系已自行平衡,只剩下附加力偶系。
证。
3.1.2 力系向任一点简化的主矢和主矩
如图所示,由 n 个力 F1,F2,…,Fn 组成的平面任意力系作用在刚体上。在平面上任取一点 O,称 为简化中心;应用力的平移定理,把各力都平移到点 O。这样,得到作用于点 O 的力 F′1,F′2,…,F′n, 以 及 相 应 的 附 加 力 偶 , 其 矩 分 别 为 M1 , M2 , … , Mn , 如 图 所 示 。 这 些 附 加 力 偶 的 矩 分 别 为 Mi MO (Fi ) (i 1,2, ,n)
900 N mm 因此,该力系向 O 点简化的结果为一个力 FRx 和一个力偶 MO,力 FRx 的大小等于该力系的主矢,力 偶 MO 的力偶矩的大小和转向与该力系对 O 点的主矩相同,如图所示。
16816_工程力学(第3章)

3.1
力在空间直角坐标轴上的投影
3.2
力对轴之矩
3.3
空间力系的平衡方程式及应用
图3.1
空间力系
本章主要讨论力在空间坐标轴上的投 影、力对轴之矩的概念与运算以及空间力 系平衡问题的求解方法。
3.1 力在空间直角坐标轴上的投影
力在空间坐标轴上投影的概念与力在 平面坐标轴上投影的概念基本相同,由于 力所对应的参考系不同,计算方法也有所不同。力在空间坐标轴上的投影有两种运 算方法,即直接投影法和二次投影法。
方法二:首先将图3.9(a)所示的空 间力系分别投影到三个坐标平面内,如图 3.9(b)、(c)、(d)所示。然后分别 写出各投影面上的力系相应的平衡方程式, 再联立解出未知量。
(1)在Axz平面内,如图3.9(b)所 示。
由 解得
Ft2 = 7.16kN
(2)在Ayz平面内,如图3.9(c)所 示。
根据合力矩定理,求得力F对x、y、z 三轴之矩如下: M x ( F ) = M x ( F x) + M x ( F y) + M x ( F z) = 0 − Fy h + Fz rcos45° = −35.4N × 1m + 86.6N × 1m × cos45° = 25.8N ∙ m
M y ( F ) = M y ( F x) + M y ( F y) + M y ( F z) = − Fx h − 0 − Fz rsin45°
图3.4
六面体上的空间力
解:力F1与y轴平行,故直接投影即可 得到F1x = 0,F1y = 100N,F1z = 0 力F2与坐标平面Oyz平行,故直接投影 即可得到
力F3为空间力,所在平面ABCD与坐标 平面Oyz相垂直,故用二次投影法求解。首 先将力F3向x轴和平面Oyz上投影,其中
工程力学第3章

i 1 n
或简写为
M O ( FR ) M O ( Fi( ) 3 3)
此结果表明,汇交力系的合力对任一点之矩, 等于力系中各分力对同一点之矩的矢量和。 这就是汇交力系的合力矩定理。
FR FR1 FR 2 ( F1 FT1 ) ( F2 FT2 ( ) 3 5a) F1 F2
这表明两个反向平行力F1和F2的合力矢FR等于两力的矢量和。由于F1和F2 是反向平行力,则合力FR的作用线必与这两力的作用线平行,并且矢量和变 为代数和。已设F1>F2,则合力FR的大小是
FR F1 F ( ) 2 3 5b
合力FR的指向与力F1相同。
合力作用线的位置,可根据合力矩定理确定。取合力FR 的作用线与连 线AB的交点C为矩心,则
M C ( FR ) M C ( F1 ) M C ( F2 )
F1 ) M C ( F2 ) F1 AC F2 BC 0
对于平面汇交力系,将矩心取在力系所在的平面内,则式(3-3)中的所有 力矩矢量成为共线矢量,于是有
M O ( FR ) M O ( Fi( ) 3 4)
即平面汇交力系的合力对某一点之矩,等于力系中各分力对同一点之 矩的代数和。 如果求一个力对力系所在平面内一点的矩,而力臂又不易求出时,常将 此力分解为两个易定力臂的分力,然后用合力矩定理求出该力矩。
第3章 力 偶 理 论
力偶是一种特殊的力系。它对刚体的作用是仅使刚体转动。力偶 对刚体的转动效应完全取决于力偶矩。作用于刚体上的一群力偶 称为力偶系。力偶系是一种基本力系,它是研究复杂力系的基础。 本章研究力偶系的合成和平衡问题。
工程力学课程第3章

第3章教学方案——平面任意力系作用在物体上的力系,若各力的作用线在同一平面内,既不平行又不汇交于一点,称为平面任意力系。
本章研究平面任意力系的简化和平衡问题。
3.1 力线平移定理●定理:作用在刚体上的力,可以平移至刚体内任一指定点,若不改变该力对于刚体的作用则必须附加一力偶,其力偶矩等于原力对新作用点的矩。
●证明:如图3.1(a)所示,设有一力F作用于刚体的A点,为将该力平行移到任一点O,在O点加一对作用线与F平行的平衡力F〃和F′,且使F′= F〃= F,在F、F〃、F′三力中,F和F〃两力组成一个力偶,其力偶臂为d,力偶矩恰好等于原力对点O的矩,如图3.1(b)所示。
显然,三个力组成的新力系与原力F等效。
这三个力可看做是一个作用在O 点的力F′和一个力偶(F,F〃)。
这样,原来作用在A 点的力F便被等效为作用在新作用点O的力F′和力偶(F,F〃)。
力偶(F,F〃)称为附加力偶,如图 3.1(c)所示,其矩M为M = M O(F)= F·d图 3.1●应用:力线平移定理是力系简化的理论依据,也是分析和解决实际工程中力学问题的重要依据。
如图 3.2(a)所示,钳工攻丝时,要求在丝锥手柄的两端均匀用力,即形成一力偶使手柄产生转动进行攻丝。
若在手柄的单边加力,如图 3.2(b)所示,那么丝锥极易图 3.2折断,这是因为,作用在A 点的力可等效为作用于O 点的力F′和一附加力偶M,如图3.3(c)所示。
力偶M使手柄产生顺时针转动进行攻丝,而丝锥上受到的横向力F′易造成丝锥折断。
3.2.1 平面任意力系向平面内一点的简化●简化依据:力线平移定理。
●简化方法:把各力向平面内任取的一点O 平移(称为简化中心),得到作用于点 O 的力,以及相应的附加力偶,如图 3.3(b )所示。
这样,平面任意力系简化成平面汇交力系和平面力偶系。
分别将平面汇交力系和平面力偶系合成为一个合力和一个合力偶,如图 3.3(c )所示。
工程力学第三章力矩力偶系

M ( F ) r F sin O
定理:如果力系存在合力,则合力对某一点的矩等于力 系中各分力对同一点的矩的矢量和。
即:若作用在刚体上 { F , F , , F } { F } 1 2 n R
则:
M ( F ) M ( F O R O i)
i 1
n
例 水平梁 AB 受按三角形分布的载荷作用。载荷的最 大值为 q ,梁长为 l 。试求合力作用线的位置。
0
将 Q 和 q(x) 的数值代入可得
xC
2 l 3
§3-2 力偶理论
一.力偶和力偶矩
1、力偶 · 力偶的作用 效果 ·力偶的第一性质
力偶的定义:由大小相等,方 向相反且不共线的两个平行力 所组成的力系,称为力偶。记 之为: ( F, F ' )
F
hபைடு நூலகம்
F
'
h——力偶臂
力与力偶的作用效果比较:
FA
第三章 力矩 力偶系理论
§3-1 力对点之矩(力矩) 力对刚体的移动效应用力矢量来度量 力对刚体的转动效应用力矩来度量 一、力对点之矩
B F O
定义:
r
h
A
M r F oF
矢量积形式
M r F oF
二、 合力矩定理
大小: r F F h 2 OAB 方向: 由右手定则判定
25 N 0.4 m
M=10 Nm
25 N
§3-3 力偶系的合成与平衡
力偶系合成的结果为一合力偶
{ M , M , , M } { M } 1 2 n R
n
即:
M R Mi
i 1
力偶平衡的充分必要条件:
工程力学 第三章 平面任意力系

M O FR d
合力矩定理:
M o ( FR ) M O M O ( Fi )
3.1.5 平面任意力系的简化结果分析 ⑶平衡的情形
FR 0 M O 0
平衡
与简化中心的位置无关
例3-1 已知作用在梁AB上的 两力a=3m,求合力大小及作 用线位置。 解:
⑴大小: FR=30KN ⑵方向: 铅垂向下 ⑶作用线位置: A
Fy 0 F1 sin F2 sin F3 sin 0
平面平行力系的方程为两个,有两种形式:
Fy 0 M A 0
各力不得与投影轴垂直
M A 0 M B 0
两点连线不得与各力平行
例3-10已知: P 700kN, P2 200kN, AB=4m; 1
3.2.1 平面任意力系的平衡条件 平面任意力系平衡的充要条件是:
力系的主矢和对任意点的主矩都等于零
FR 0 M O 0
3.2.2 平面任意力系的平衡方程
FR ( Fx ) ( Fy )
2
2
M O M O ( Fi )
Fx 0 Fy 0 M O 0
d.方程要标准
例3-4 已知: AC=CB= l,P=10kN;求:铰链A和DC杆 受力。
解:取AB梁,画受力图.
Fx 0 FAx FC cos 45 0 Fy 0 FAy FC sin 45 P 0 M A 0 FC cos 45 l P 2l 0 解得: FC 28.28kN, FAx 20kN, FAy 10kN
例 3-5 已知: 1 4kN, P2 10kN, 尺寸如图; P 求:BC杆受力及铰链A受力。
工程力学第三章剪切

剪切应力
剪切应力的定义
01
剪切应力是指物体在剪切力作用下产生的应力,其大小与剪切
力和剪切面积有关。
剪切应力的计算
02
剪切应力的大小可以通过公式sigma = F / A计算,其中sigma
是剪切应力,F是剪切力,A是剪切面积。
剪切应力的作用
03
剪切应力是工程结构中需要考虑的重要因素之一,过大的剪切
剪切技术的创新应用
随着新材料和新工艺的发展,剪切技术在工程领域的应用将更加广泛。
剪切技术将与智能材料和结构相结合,实现自适应和智能化的剪切行为,以满足复 杂工程结构的性能要求。
剪切技术将在新能源、环保、医疗等领域得到应用,如利用剪切原理实现高效能量 转换和利用,以及在医疗领域中实现精准的手术操作等。
物体抵抗剪切破坏的最大能力称为剪切强度。
剪切的分类
纯剪切
在纯剪切状态下,物体仅在剪切力的作用下产生 相对位移,而没有发生弯曲或拉伸。
弯曲剪切
在弯曲剪切状态下,物体不仅在剪切力的作用下 产生相对位移,同时还受到弯曲力的作用。
拉伸剪切
在拉伸剪切状态下,物体在剪切力的作用下产生 相对位移,同时还受到拉伸力的作用。
剪切强度的影响因素
材料的剪切强度受到多种因素的影响,如材料的种类、显微组织、热处理状态、加载条件等。了解和掌 握这些因素对于提高材料的剪切强度和优化结构设计具有重要意义。
03 剪切的实验研究
实验目的
验证剪切理论
通过实验验证工程力学中剪切理论的正确性。
探索剪切现象
通过实验观察和分析剪切现象,深入理解剪 切行为的本质。
工程力学第三章剪切
contents
目录
• 剪切概述 • 剪切的力学分析 • 剪切的实验研究 • 剪切的工程应用 • 剪切的未来发展
工程力学第三章

M
解得
A
0 FB 4a M P 2a q 2a a 0
3 1 FB P qa 4 2
Fy 0
解得
FAy q 2a P FB 0
P 3 FAy qa 4 2
例3-4 已知: P 100kN, M 20kN m,
FRy
主矩: M o M o (F )
3.平面固定端约束
=
=
≠
=
§3.2 平面任意力系简化结果的分析
1.平面任意力系简化结果的分析
=
其中
MO d FR
M o FRd
FR FR F
若为O1点,如何?
主矢
主矩
最后结果
合力 合力 合力偶 平衡
说明
合力作用线过简化中心
q 20 kN
求: 固定端A处约束力.
, l 1m; F 400kN, m
解: 取T型刚架,画受力图.
Fx 0
1 F Ax q 3l F sin 60 0 2
解得 FAx 316.4kN
FAy P F cos 60 0 Fy 0 解得 FAy 300kN
合力作用线距简化中心M O
MO 0 FR 0
MO 0 MO 0
FR
MO 0 FR 0
与简化中心的位置无关
与简化中心的位置无关
2.合力矩定理
M o ( FR ) M O M O ( Fi )
例3-1
已知:
P 450kN, P2 200kN, 1 F1 300kN, F2 70kN;
第3章 平面任意力系
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
节点
杆件
节点
杆件
桁架分类
平面桁架 平面结构,载荷作 用在结构平面内; 对称结构,载荷作 用在对称面内。 空间桁架 结构是空间的,载 荷是任意的; 结构是平面,载荷 与结构不共面。
桁架分类
便于布置双层结构,利 于标准化生产,但杆力分布 不够均匀 杆力分布不均匀,构 造布置困难,但斜面符合 屋顶排水需要
I
XA 0 M B 0 YA 3a P 2a P a 0
x
F
0
YA P
2、选截面 I-I ,取左半部研究
由 M A 0 Fy 0
A'
F
x
0
Pa h
S 4h YA a 0 Y A S5 sin P 0 S 6 S 5 cos S 4 X A 0
工程中由一些直杆通过焊接、铆接或螺栓连接而成 的几何形状不变结构------“桁架”。
桁 架 的 组 成
基 本 三 角 形
所有桁架的基本组成单位都是由三杆通过铰链连接而成的三角 形。在这个基本单位上再附加上或多或少的三角形即可构成简单或大 型的桁架结构。这样的结构具有坚固性——简单桁架
力学中常见的桁架简化计算模型
桁架的优点:轻,能充分发挥材料性能。
工程中的桁架结构
房屋建筑中的桁架
房屋建筑中的桁架
F P
房屋建筑中的屋架
桥梁桁架
桥梁桁架
大型起重机械的机身
高压输电线铁塔结构
桁架力学模型的抽象
F
P
桁 架 力 学 模 型 的 抽 象
1、桁架中各杆件——等直杆
2、杆件与杆件的连接处——节点
节点——光滑铰链约束 不同材料的杆件,采用不同的节点构造
桁架所受的载荷通常都是以一定的方式传到桁架的节点上
简化计算模型 桥梁桁架的计算简图
节点 杆件
桁 架 力 学 模 型 的 抽 象
1、桁架中各杆件——等直杆 2、杆件与杆件的连接处——节点(光滑铰链约束) 3、外载荷——作用在桁架的节点上
满足上述简化条件的结构---理想桁架 理想桁架基本假定:
1.各杆均为不计自重的直杆; 2.所有杆件只在端部连接,连接处 均假设为光滑铰链; 3.外力及支座反力均作用在节点上。 由上述假设可知: 桁架中的杆件只承受拉力或压力,不承受弯曲--二力杆 二力杆—组成桁架的基本构件。
C
① 两杆节点上无载荷、且两杆不在 一条直线上时,该两杆是零杆。
S1 S 2 0
零 杆
FP B
零 杆
② 三杆节点无载荷、其中两杆在 一条直线上,另一杆必为零杆 且S1 S 2
桁架中零力杆的判断 ① 两杆节点无载荷、且两杆不在 一条直线上时,该两杆是零杆。
S1 S 2 0
② 三杆节点无载荷、其中两杆在 一条直线上,另一杆必为零杆 ③ 四杆节点无载荷、其中两两在 一条直线上,同一直线上两杆 内力等值、同性。 且S1 S 2
3 4 25 FAD 2.5kN; 4 3 Fix 0, FAB FAD 0 ; FAB 1.5kN; 5
[ D]
Fiy 0, F FAD
4
2 2
4m
0;
D 3m
3m
3m
E 3m
F
[A] FAB FAD
Fiy 0,
Fix 0,
FDA
4 4 FDB 0 ; 5 5
FDA
FDB
FDB 2.5kN;
FDE 3kN;
[D] FDE
3 3 FDB FDA FDE 0 ; 5 5
[B] F 0, F 4 F 4 0 ; iy BD BE
F A 4m D 3 3 3 FEB FBA [B] FBC FED [E] FBE FBD FE E 3 B C
代入 S1' S1 10KN 解得 : S 3 10 kN
S 4 10 kN
F
x
0
' S5 S 2 0
' 代入S 2 S 2后
解得 S 5 8.66 kN
S 2 8.66kN S1 10kN
[例] 已知:如图,h,a,P 。求:4,5,6杆的内力。
解:1、研究整体求支反力 I
4m D 3 3 3 1 E 3
解:用截面法,设法取不超过 三个未知力的部分分析。 MB=0, 6F+FDE·4=0
F
FDE= –3kN。
A
FAB
B
FDB
D
FDE
例:平面桁架如图示,已知:F,求:杆1的内力。 解:取整体研究
3 M C 0, 2aFAy aF 0; 2
a
F
m E 1 F C m a B a m FFE F1 FAY FAX m FAB FC
FAy
3 F; 4
D
a
经判断FDB= 0,BD杆为零杆; 取 m-m 截面左侧;
M C 0, 2aFAy aF1 0 ;
A` FAx FAy
3 F1 F; 2
0
C
例:悬臂式桁架如图所示。a=2 m,b=1.5 m,试求杆件 GH,HJ,HK的内力。
K b J b L a I a m F a C a G D A m
Fix 0, FCB FCE
Fiy 0, FCE
3 FCX 0; 5
FCX 0 ;
FCY 6kN;
FCB
[C]
FCX
4 FCY 0 ; 5
FCY FCE
可取[A][C]逐点求解所有内力与约束力,再整体方程校核。
1 F A B C
求:杆FDE的内力
5
5
FBE 2.5kN;
Fix 0, FBC FBA FBE 3 3 FBD 0; 5 5 4.5kN;
[E]
Fix 0, FEC
FBC
3 3 FEB FED 0; 5 5 FEC 7.5kN;
FEC
Fiy 0, FEB
[C]
4 4 FEC FE 0 ; 5 5 FE 8kN;
X B 0, N A YB 5 kN
②依次取A、C、D节点研究,计算各杆内力。
Fx 0
Fy 0
S2 S1 cos 300 0
N A S1 sin 300 0
解得 S 2 8.66kN, S1 10kN(表示杆受压)
0 0 S cos 30 S ' cos 30 0 F 0 4 1 x 0 0 S S ' sin 30 S sin 30 0 F 0 3 1 4 y
S5 0
S 4
S6
Pa h
以上各例说明 : 节点法:可用于计算全部杆的内力 截面法:可用于计算部分杆内力 先把杆都设为拉力,计算结果为负时,说明是压力, 与所设方向相反。
例:平面桁架如图示,已知:F=2kN,求:各杆的内力与 支座约束反力。 F 解:用节点法,取不超过二个 A B C 未知力的[A]分析。
几何不可变 几何可变
在平面桁架结构中,不难建立关于节点数 和杆件数与保持坚固性之间的关系:
m2n-3
m - 杆件数 n - 节点数
m2n-3
m - 杆件数 n - 节点数
n=3, m=23-3=3
n=8, m=28-3=13
m=2n-3
§3-4
1. 2. 3. 4. 5.
特殊构架——桁架
桁架的定义; 工程中的桁架结构及其力学中的桁架模型; 理想桁架的基本假定; 桁架类型; 桁架静力分析方法。
桁 架 的 定 义
工程中由一些直杆通过焊接、铆接或 螺栓连接而成的几何形状不变的结构,称 为------“桁架”。
桁架是工程中常见的结构,特别是在一些大跨度 的建筑物或大尺寸的机械中常采用桁架结构。 桁架结构常用于大跨度的厂房、展览馆、体育 馆和桥梁等公共建筑中。
n
列平衡方程 a FGH FHK 0 2 2 a b
H
FEH
F 0, F y
解得
FGH
b a b
2 2
FHJ 0
FHK FGH FHJ
a 2 b2 5 FGH ( FHK FEH ) F a 6 b F FHJ FGH 2 a 2 b2
3、外载荷——作用在桁架的节点上
桁架所受的载荷通常都是以一定的方式传 到桁架的节点上的 。 具体说明如下:
桁架的节点(不同材料的杆件,采用不同的节点构造)
桁架的节点(不同材料的杆件,采用不同的节点构造)
杆件的连接处实际上更接近于固定端,但是由 于桁架的杆件都比较细长,端部对整根杆件转动的 限制作用较小,因此把节点简化为光滑铰链不会引 起太大误差。
2. 用截面n-n将杆EH,EG , DF , CF截断。 取右半桁架为研究对象,受力分析如图。 列平衡方程
M
FEH
F
( F ) 0,
F 2a FEH 2b 0
F 解得 [ 取节点H ]
A
FHK 2 F
FEH FEG
4 F 3
FDF D
F
F
x
0,
FEH
FCF C
S1 S 2
S3 S4
0 0 0
0
0 0
0
0 0 0 0
能否去掉 能否去掉 零杆? 零杆?
能否去掉 能否去掉 零杆? 零杆?
[例] 已知:如图 P = 10 kN,求各杆内力? 解:①研究整体,求支座反力
F
x