并联机器人原文
并联机器人原文知识分享
并联机器人原文Virtual Prototyping of a Parallel Robot actuated by Servo-Pneumatic Drives using ADAMS/ControlsWalter Kuhlbusch, Dr. Rüdiger Neumann, Festo AG & Co., Germany SummaryAdvanced pneumatic drives for servo-pneumatic positioning allow for new generations of handlings and robots. Especially parallel robots actuated by servo-pneumatic drives allow the realization of very fast pick and place tasks in 3-D space. The design of those machines requires a virtual prototyping method called the mechatronic design [ 1]. The most suitable software tools are ADAMS for mechanics and Matlab/Simulink for drives and controllers. To analyze the overall behavior the co-simulation using ADAMS/Controls is applied. The combination of these powerful simulation tools guarantees a fast and effective design of new machines.1. IntroductionFesto is a supplier for pneumatic components and controls in industrial automation.The utilization of pneumatic drives is wide spread in industry when working in open loop control. It’s l imited however, when it comes to multipoint movement or path control. The development has been driven to servo-pneumatic drives that include closed loop control. Festo servo-pneumatic axes are quite accurate, thus they can be employed as drives for sophisticated tasks in robotics. The special advantage of these drives is the low initial cost in comparison to electrical and hydraulic drive systems. Servo-pneumatic driven parallel robots are new systems with high potentials in applications. The dynamical performance meets the increasing requirements to reduce the cycle times.One goal is the creation and optimization of pneumatic driven multi-axes robots. This allows us to support our customers, and of course to create new standard handlings and robots (Fig. 1).The complexity of parallel robots requires the use of virtual prototyping methods.Fig. 1. Prototypes of servo-pneumatic driven multi-axes machinesPreferred applications are fast multipoint positioning tasks in 3-D space. Free programmable stops allow a flexible employment of the machine. The point to point (ptp) accuracy is about 0.5 mm. The continuous path control guarantees collision free movement along a trajectory.1.1. Why parallel robots?The main benefits using parallel instead of serial kinematics is shown in Fig. 2.Fig. 2. Benefits of robots with parallel kinematicsHigh dynamical performance is achieved due to the low moved masses. While in serial robots the first axis has to move all the following axes, the axes of a parallel robot can share the mass of the workpiece. Furthermore serial axes are stressed by torques and bending moments which reduces the stiffness. Due to the closed kinematics the movements of parallel robots are vibration free for which the accuracy is improved. Finally the modular concept allows a cost-effective production of the mechanical parts. On the other hand there is the higher expense related to the control.1.2. Why Pneumatic Drives?The advantages of servo-pneumatic drives are:direct drives→high accelerating powercompact (especially rodless cylinders with integrated guidance)robust and reliablecost-effectiveDirect drives imply a high acceleration power due to the low equivalent mass in relation to the drive force. With pneumatic drives the relationship is particularly favorable. Festo has already built up some system solutions, predominantly parallel robots (see Fig. 1), to demonstrate the technical potential of servo-pneumatics. Which performance can be reached is shown in Fig. 3. This prototype is equipped with an advanced model based controller that makes use of the computed torque method [ 3].Fig. 3. Performance of the Tripod2. Design MethodThe system design, where several engineering disciplines are involved in, requires a holistic approach. This method is the so-called mechatronic design. The components of a mechatronic system are the mechanical supporting structure, the servo drives as well as the control. All these components are mapped into the computer and optimized with respect to the mutual interaction. This procedure can be used to analyze and improve existing systems as well as to create new systems. The two main steps of the mechatronic design are first building models in each discipline, and secondly the analysis and synthesis of the whole system. These steps are done in a cycle for the optimization.The modeling can be carried out in two ways: Either you apply one tool to build up models in all disciplines, but with restrictions. The other way is to use powerful tools in each discipline and to analyze the whole system via co-simulation. In this case you have to consider some specials of the solving method like communication step size or direct feedthrough behavior.2.1. Why Co-Simulation?Co-simulation is used because of the powerful tools, each specialized in its own discipline. ADAMS is an excellent tool for the mechanical part and Matlab/Simulink is the suitable tool for controller development and simulation of pneumatics.The behavior of the mechanical part is modeled at best usingADAMS/View. The advantages of ADAMS are:fast physically modeling of rigid and elastic bodiesextensive features for parameterizationanimation of simulation resultssolving inverse kinematics by “general point motion”visualization of eigenmodes (ADAMS/LINEAR)export of linear models (A,B,C,D)A big advantage is the automatic calculation of the direct and inverse kinematics. The direct kinematics of parallel structures often cannot be solved analytically. Furthermore different kinematics can be compared to each other very easily when you define a trajectory of the end-effector via “general point motion”.Applying these two software tools guarantees a high flexibility regarding the design of new systems. It is very important to analyze the closed loop behavior at an early stage. This makes a big difference between the mechatronic design and the conventional design. Furthermore the visualization of the mechanical system makes the discussion within a team very easy.2.2. RestrictionsA disadvantage is that the model of the mechanics is purely numerically available. However some symbolic code of the mechanical system is needed for the control hardware when the system becomes realized. In general we have to derive the equations of the inverse kinematics, which are used in the feed forward control. For specific robot types a controller with decoupling structure is necessary in order to fulfill the requirements. Then the symbolic code of the dynamics is needed. For this we have to pull up further tools to complete the task.2.3. What has to be analyzed?For the design of new robots it is important to know about the effect on the system stability and accuracy. The main properties that influence stability and accuracy are opposed in Table 1 for different kinematical structures.Table 1: Properties of different kinematical configurationsWith respect to the control the cartesian type is the best one. But the main disadvantage of a serial robot compared with a parallel one is the lower dynamics and the lower stiffness (see Fig. 2).Depending on the requirements with regard to dynamics and accuracy different control approaches must be applied. As mentioned above we prefer to employ a standard controller SPC200 for a single axis. Due to the coupling of the axes the stability of the closed loop system must be checked.3. Model of the TripodThe model of the Tripod consists of three parts: the mechanics, the pneumatic drives, and the controller.3.1. Mechanics (ADAMS)We apply the so-called delta-kinematics which causes a purely translational movement of the tool center point (tcp). An additional rotary drive allows the orientation of the gripper in the horizontal plane. Together with the rotary drive the machine has four degrees of freedom.Fig. 4. Degrees of freedom and structure of the TripodThe tripod is modeled using rigid body parts what is often sufficient for the present type of parallel structure. The upper and lower plates are fixed to ground. The profile tubes are connected to these plates via fixed joints. Eachslider has one translational degree of freedom. Both ends of a rod are connected to the neighbored parts by universal joints. Including the rotary drive, the model verification results in four Gruebler counts and there are no redundant constraints. The model is parameterized in such a way that different kinematical configurations can be generated very easily by means of design variables. The most important parameters are the radiuses of the plates (see Fig. 4) and the distances to each other. For instance the following configurations can be achieved just by variation of these parameters or design variables.Fig. 5. Variation of kinematics by “design variables”3.2. Servo-Pneumatic Drives (Simulink)The models of the servo-pneumatic drives are developed by means of Matlab/Simulink. Depending on the requirements several controller models were developed. It is common to all that they are highly non-linear. Mainly the compressibility of air makes a more complex control system necessary. All controller models including the standard controller SPC200 are available asC-coded s-functions. This allows to use the same code in the simulation as well as on the target hardware.A survey of the control scheme is shown in Fig. 6. For this contribution it is important to know about the interface for the co-simulation. The calculated forces of the servo pneumatics are the inputs to the mechanics. The slider positions are the outputs of the mechanics. Detailed information on the controllers can be found in [ 2] and [ 3].Fig. 6. Control structure4. Analyzing the behavior of the whole systemWhen the modeling is done we can go on with the second step of the mechatronic design. In the following it is assumed that the SPC200 controller always controls the machine. The task is the analysis and synthesis of different parallel kinematics relative to stability, dynamics, and accuracy for a given workspace.Some studies, e.g. concerning the workspace, can be made exclusive using ADAMS. Others such as feedback analysis are carried out by means of co-simulation.The workspace can be determined by varying all drive positions in all combinations. After simulation the end-effector positions are traced using the feature “create tracespline”.Fig. 7. Drive motions for the workspace calculationThe data can be visualized in ADAMS or any other graphics tool. As an example the workspace of the Tripod configuration of Fig. 7 is represented in Fig. 8Fig. 8. Workspace of the Tripod (configuration as in Fig. 7) Measuring the velocity of the end-effector at the same time delivers the gear ratios of all drives over the workspace.To examine the behavior of the closed loop system ADAMS/Controls is used to couple ADAMS and Simulink. Before the model can be exported some inputs and outputs of the plant must be defined by state variables. The inputs of the Tripod are the drive forces. Though the controller makes only use of the drive position some additional signals are defined as outputs: The drive velocities are needed for solving the differential equations of the pressures in the pneumatics model. Furthermore we need the velocity of the tool center point to calculate the non-linear gear ratios. Finally the drive accelerations serve for the calculation of the equivalent moved masses. The whole system is shown in Fig. 9.Fig. 9. Model of the whole systemThe model of the mechanics is embedded in Simulink. ADAMS/Controls makes the interface available by means of s-function.The equivalent moved masses depend on the positions of drives. The non-linearity of the robot grows with the strength of this dependency. As shown in Table 1 with the parallel kinematics there is a medium strong coupling of the dynamics. This coupling is neglected, if we use the standard SPC200 controller. Nevertheless there is an influence on the stability of theclosed loop system. To initialize and parameterize this controller we need the following information from the mechanics model:equivalent moved mass of each drive (depends on slider positions)gravity forces in initial positionCoulomb and viscous frictionThe controller is designed for a single axis with a constant mass. Due to the position dependency of the equivalent moved masses of the robot we have to choose an average value for each drive. Unfortunately with ADAMS there is no easy way to calculate the equivalent moved masses along atrajectory. We tried to apply different methods such as dividing a drive force by its acceleration during a slow motion, but this method yielded not insatisfying results. The best method found is the linearization of the system.However this requires ADAMS/Linear. When we define the drive accelerations as plant outputs in ADAMS/Controls the direct feed through matrix D of the exported linear system delivers the mass matrix in the defined operating point as1)()(-⋅=q q D f MCorresponding to the three degrees of freedom of the rigid body system the size of the mass matrix M(q) is three by three. It depends on the vector of the generalized coordinates of the drives. The non-diagonal elements cause the coupling between the axes. The factor f depends on the units chosen for the inputs and outputs. Whenthe forces are given in [N] and the accelerations are given in [mm/s 2] f is 0.001.With a slider mass of 2 kg and an end-effector mass of 2 kg the massmatrix for the three positions shown in Fig. 10 are:The gravity forces can be calculated very easily by static simulation.Likewise it is easy to model the friction in ADAMS. Nevertheless theparameters can differ very strong from one application to another one.With the parameterized controller the stability should be checked inseveral operating points by means of eigenvalues and the dynamics of the closed loop system can be analyzed by means of frequency responses.Of course with a robust controller you can start with a simulation in time domain. This gives information about the accuracy and system limits. For this we need the references for the drives. For a reference trajectory of the tool center point ADAMS applying the “general point motion” can generate the drive positions.Fig. 10. Solving inverse kinematics by feature "general point motion"In the following the simulation results are presented for a tripod configuration shown in Fig. 10. The workspace of this machine is illustrated in Fig. 8.Fig. 11. Left: Trajectory of the tool center point. Right: Drive references and measures5. ConclusionThe coupling of the software tools ADAMS and Simulink via co-simulation is a powerful method of virtual prototyping. This method enables an efficient design and optimization of servo-pneumatic driven robots. Especially robots with parallel kinematics can be analyzed very fast using ADAMS. Due to the potential of the linear analysis the use of ADAMS/Linear is meaningful. Particularly with controlled systems the linear analysis is required.Literature[ 1] Kuhlbusch, W., Moritz, W., Lückel, J., Toepper, St., and Scharfeld, F.: T RI P LANAR - A New Process-Machine Type Developed by Means of Mechatronic Design. Proceedings of the 3rd International Heinz Nixdorf Symposium on Mechatronics and Advanced Motion Control, Paderborn, Germany, 1999.[ 2] Neumann, R., Göttert, M. Ohmer, M.: Servopneumatik – eine alternative Antriebstechnik für Roboter, Robotik 2002, 19-20. Juni in Ludwigsburg, Germany, 2002, VDI-Bericht Nr. 1679 p. 537-544.[ 3] Neumann, R., Leyser, J., Post, P.: Simulationsgestützte Entwicklung eines servopneumatisch angetriebenen Parallelroboters. TagungsbandSIM2000 – Simulation im Maschinenbau, Dresden, Germany, 2000, p. 519-536.。
并联机器人

School of Mechanical Engineering
航天器对接口
School of Mechanical Engineering
05
承载运动
移动重载装置模型
School of Mechanical Engineering
06
海上钻井平台
海上钻井平台模型
School of Mechanical Engineering
四自由度并联机构
Pierrot和Company,1999年提出四自由度 H4并联机构 在1999年,Rolland年提出两种用于物料搬运的 四自由度并联机构:Kanuk和Manta 在2000年,黄真和赵铁石综合处第一种对称的四 自由度4-URU并联机构,可实现三个移动自由 度和一个绕Z轴的转动自由
School of Mechanical Engineering
六自由度并联机构
在1999年,Park与Lee年提出一种机构复杂的双层五自 由度并联机构 ustad提出一种基于两个并联机构的五自由度混合型结构 在2001年,Jin综合出具有三个移动自由度和两个转动自 由度的非对称五自由度并联机构
School of Mechanical Engineering
在原有DELTA机器人的分支运动 链中加装了一个和动平台垂直的 转动副,从而在DEITA机器人原 有的三个移动自由度外,又获得 了一个转动自由度。
H4四自由度并联机构
Kanuk四自由度并联机构
School of Mechanical Engineering
School of Mechanical Engineering
Delta三自由度并联机构
视频播放
School of Mechanical Engineering
机器人学-并联机构与并联机器人共36页文档

51、山气日夕佳,飞鸟相与还。 52、木欣欣以向荣,泉涓涓而始流。
53、富贵非吾愿,帝乡不可期。 54、雄发指危冠,猛气冲长缨。 55、土地平旷,屋舍俨然,有良田美 池桑竹 之属, 阡陌交 通,鸡 犬相闻 。
41、学问是异常珍贵Байду номын сангаас东西,从任何源泉吸 收都不可耻。——阿卜·日·法拉兹
42、只有在人群中间,才能认识自 己。——德国
43、重复别人所说的话,只需要教育; 而要挑战别人所说的话,则需要头脑。—— 玛丽·佩蒂博恩·普尔
44、卓越的人一大优点是:在不利与艰 难的遭遇里百折不饶。——贝多芬
45、自己的饭量自己知道。——苏联
并联机器人01

模块化多结构并联组合机器人
机器人本体采用模块化设计,通过传动链的不同组合方式,可以重构出6-SPS伸缩式六
自由度并联机器人、6-PSS滑块式六自由度并联机器人、6-PSS剪式六自由度并联机器人、
3-Delta型三平动式并联机器人,是进行变脸继前日恩结构学与动力学研究的理想平台。
结构一:6-SPS伸缩式六自由度并联机器人结构二:6-PSS滑块式六自由度并联机器人
结构三:6-PSS剪式六自由度并联机器人结构四:3-Delta型三平动式并联机器人
重构
形式一:6-SPS伸缩式
重构形式三:6-PSS剪式
重构形式四:3-Delta型。
Delta并联机器人系统总体设计-论文

国内外学术界和工程界对研究和开发并联机床都非常重视。1994年在芝加哥国际机床博览会(IMTS’94)上首次展出了称为“六足虫”(Hexapod)和“变异型”(VARIAX)的数控机床与加工中心并引起了轰动[。此后,各主要工业国家都投入了 大量的人力和物力进行并联机床的研究与开发。如美国IngersollMilling公司、Giddings&Lewis公司和Hexal 公司,英国GeodeticTechnology公司,俄罗斯Lapik 公司,德国Mikromat公司、亚琛工业大学、汉诺威大学、斯图加特大学,挪威Multicraft 公司,瑞士ETZH 和IFW 研究所,瑞典Neos机器人公司,意大利Comau 机床公司,丹麦Braun公司,日本丰田公司、日立公司、三菱公司、韩国SENATECHNOLOGIES 公司等单位相继研制出不同结构形式的数控机床、激光加工和水射流机床、坐标测量机等基于并联机构的制造设备。并联机床所涉及的基本理论问题同样引起了许多研究单位的重视, 由美国国家科学基金会动议,1998 年在意大利召开了第一届国际并联运动学机器专题研讨会,2000年在美国召开了第二届国际并联运动学机器专题研讨会。
在本书中,介绍了并联机器人的产生特点及应用。计算了机器人的自由度,位置正反解,并分析了它的空间奇异形位。还通过分析比较几种控制器和方案,选择其中最适合的方案。并设计了delta机器人的控制电路,并详细介绍它的控制器功能。
关键词:并联机构 位置反解 步进电机结构设计
Abstract
In recent years ,increased interest in parallel robots has been observed..Parallel robots possess a number of advantages when compored to serial arms, The most importantone is certainly the possibility to keep the motors fixed into the base ,thus allowing a largereductionof the robot structure’s active mobile mass.keeping the motors on the robot base is a requairment when direct-drive is used ,thus ,parallel robots are well suited to direct-drive actuation.Another advantage of parallel robots is their high rigiditg.these features allow more precise and much faster mani pulations. The delta parallel robot is very famous among them.
BLJQ-002并联机器人的开发研制
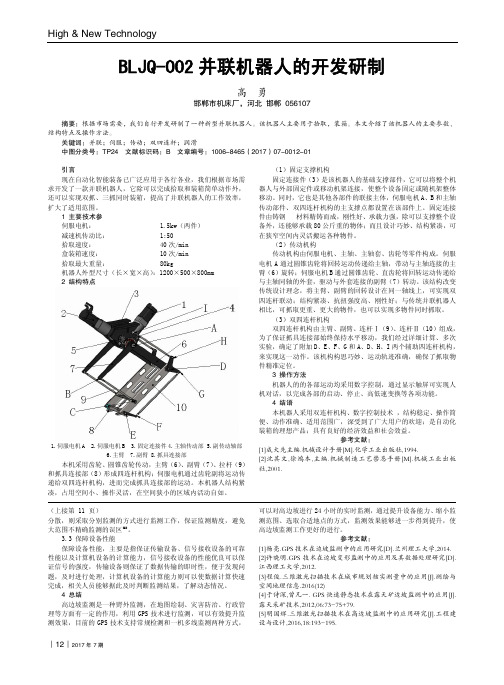
High & New Technology︱12︱2017年7期BLJQ-002并联机器人的开发研制高 勇邯郸市机床厂,河北 邯郸 056107摘要:根据市场需要,我们自行开发研制了一种新型并联机器人。
该机器人主要用于拾取,装箱。
本文介绍了该机器人的主要参数、结构特点及操作方法。
关键词:并联;伺服;传动;双四连杆;润滑中图分类号:TP24 文献标识码:B 文章编号:1006-8465(2017)07-0012-01引言 现在自动化智能装备已广泛应用于各行各业,我们根据市场需求开发了一款并联机器人,它除可以完成拾取和装箱简单动作外,还可以实现双抓、三抓同时装箱,提高了并联机器人的工作效率,扩大了适用范围。
1 主要技术参 伺服电机: 1.5kw(两件) 减速机传动比: 1:50 拾取速度: 40次/min 盒装箱速度: 10次/min 拾取最大重量: 80kg 机器人外型尺寸(长×宽×高):1200×500×800mm 2结构特点 1.伺服电机A 2.伺服电机B 3.固定连接件4.主轴传动部 5.副传动轴部6.主臂7.副臂8.抓具连接部本机采用齿轮、圆锥齿轮传动,主臂(6)、副臂(7)、拉杆(9)和抓具连接部(8)形成四连杆机构;伺服电机通过齿轮副将运动传递给双四连杆机构,进而完成抓具连接部的运动。
本机器人结构紧凑,占用空间小、操作灵活,在空间狭小的区域内活动自如。
(1)固定支撑机构 固定连接件(3)是该机器人的基础支撑部件,它可以将整个机器人与外部固定件或移动机架连接,使整个设备固定或随机架整体移动。
同时,它也是其他各部件的联接主体,伺服电机A、B 和主轴传动部件、双四连杆机构的主支撑点都设置在该部件上。
固定连接件由铸钢 材料精铸而成,刚性好、承载力强,除可以支撑整个设备外,还能够承载80公斤重的物体;而且设计巧妙、结构紧凑,可在狭窄空间内灵活搬运各种物件。
并联机器人的应用程序调查--中英文翻译
毕业设计外文翻译院(系)机电信息系专业机械设计制造及其自动化外文出处Parallel Manipulators Applications—A Survey (英文原文自己可以通过学校的数据库(知网)下载)有英文原文,加我Q1985639755附件 1. 原文 2. 译文2013年3月并联机器人的应用程序——一项调查Y. D. Patel1*, P. M. George21Department of Mechanical Engineering, A. D. Patel Institute of Technology, New Vallabh Vidyanagar, India2Department of Mechanical Engineering, Birla Vishvakarma Mahavidyalaya Engineering College, Vallabh Vidyanagar, IndiaEmail: *yash523@Received February 9, 2012; revised March 25, 2012; accepted April 2, 2012摘要本文提出了串行和并行机器人之间的比较。
一天,双杠 lel 机械手在各个领域中的应用程序是变得明显和增长率也迅速加以利用精密制造,医疗科学的视野和空间探索设备中。
并联机器人可以定义作为其末端链接到该基地由几个独立运动链的闭环运动学链机制。
随函附上介绍各种并联机器人的分类。
纸张的首要重点是通过来实现并联机器人产业、空间、医学科学或商业用途的申请,所需精度定位在高速度的空间机械臂。
关键词:并联机械手;六足;可重构并联机器人;三角洲机器人1.导言并联机器人是广受欢迎最近即使常规串联机器人拥有大型工作区和灵巧的操纵性。
与串行的一个基本问题是他们的悬臂结构使它们易受弯曲在高负载和vi 型压电高速度导致缺乏精度和许多其他问题。
在此文件中,串行一个并联机器人优势进行比较。
并联机器人综述论文

并联机器人综述论文院系:聊城大学东昌学院机电工程系专业:机械设计制造及其自动化班级:10本二姓名:姜丽梅学号:20100020749并联机器人综述论文摘要并联机器人是一类全新的机器人,它具有刚度大、承载能力强、误差小、精度高、自重负荷比小、动力性能好、控制容易等一系列优点,在21世纪将有广阔的发展前景。
本文根据掌握的大量并联机器人文献,对非对称3平动3UPU并联机器人在运动学、动力学、机构性能分析等方面的主要研究成果、进展进行了阐述,同时阐述了非对称3平动3UPU并联机器人在国内外的发展状况以及并联机器人构型设计原则关键词平动 3自由度并联机器人一、课题国内外现状及研究的主要成果少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值,更具有较好的应用前景,因此少自由度的并联机器人的设计理论的研究和应用领域的拓展成为并联机器人的研究热点之一。
研究少自由度并联机构最早的学者应属澳大利亚著名机构学教授 Hunt ,在1983年,他就列举了平面并联机构、空间三自由度3-rps并联机构,但对四,五自由度并联机构未作详细阐述。
在Hunt之后,不断有学者提出新的少自由度并联机构机型。
在少自由度并联机构机型的研究中,三维平移并联机构得到广泛的重视。
clavel提出了一种可实现纯平运动三自由度Delta 并联机器人,在Delta机构的支链中采用平行四边形机构约束动平台的3个转动自由度。
Tsai提出的Delta机构完全采用回转副,并通过转轴的偏移扩大了Delta机构的工作空间。
在 Tricept并联机床上采用的构型是由 Neumann发明的一种具有3个可控位置自由度的并联机构,该机构的突出特点是带有导向装置,采用3个内副驱动支链并由导向装置约束动平台。
Tsai 通过自由度分析提取支链的运动学特征,系统研究了并联机构的综合问题,特别研究了一类实现三自由度平动的并联机构。
Rasim Alizade于2004年提出基于平台类型和联接平台的形式和类型进行分类的一种并联机构的结构综合和分类的新方法和公式,并综合出具有单平台和多平台的纯并联和串并联复联机构.我国燕山大学的黄真教授及其团队除了研制出解耦微型6维力传感器和微动机械,设计出一种新的高精度的机构方案外,还率先对少自由度并联机器人的基础理静刚度和精度.上海交大的高峰教授2002年运用复合副的概念来组合已知自由度数和自由度类型的支链,通过支链输出杆特殊的Plucker坐标来综合2-自由度的机器人。
课程案例8-并联机器人
职业教育机电一体化专业教学资源库课程案例
课程名称:工业机器人调试
编制人:
邮箱:
电话:
编制时间:
编制单位:南京工业职业技术学院
《工业机器人调试》课程案例
工业机器人搬运手抓应用
1.课程案例基本信息
课程案例名称并联机器人应用
课程案例编号
关键词并联
对应知识点工业机器人码垛、搬运等
2.课程案例
并联机器人也称作并联机构(Parallel Mechanism,简称PM),可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
图1
图1中展示了并联机器人,并联机构的出现,扩大了机器人的应用范围。
随着并联机器人研究的不断深入,其应用领域也越来越广阔。
它主要应用在:(1)运动模拟器、
(2)并联机床、(3)微操作机器人、(4)医用机器人、(5)操作器、(6)包装等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Virtual Prototyping of a Parallel Robot actuated by Servo-Pneumatic Drives using ADAMS/ControlsWalter Kuhlbusch, Dr. Rüdiger Neumann, Festo AG & Co., GermanySummaryAdvanced pneumatic drives for servo-pneumatic positioning allow for new generations of handlings and robots. Especially parallel robots actuated by servo-pneumatic drives allow the realization of very fast pick and place tasks in 3-D space. The design of those machines requires a virtual prototyping method called the mechatronic design [ 1]. The most suitable software tools are ADAMS for mechanics and Matlab/Simulink for drives and controllers. To analyze the overall behavior the co-simulation using ADAMS/Controls is applied. The combination of these powerful simulation tools guarantees a fast and effective design of new machines.1. IntroductionFesto is a supplier for pneumatic components and controls in industrial automation.The utilization of pneumatic drives is wide spread in industry when working in open loop control. It’s limited howeve r, when it comes to multipoint movement or path control. The development has been driven toservo-pneumatic drives that include closed loop control. Festoservo-pneumatic axes are quite accurate, thus they can be employed as drives for sophisticated tasks in robotics. The special advantage of these drives is the low initial cost in comparison to electrical and hydraulic drive systems.Servo-pneumatic driven parallel robots are new systems with high potentials in applications. The dynamical performance meets the increasing requirements to reduce the cycle times.One goal is the creation and optimization of pneumatic driven multi-axes robots. This allows us to support our customers, and of course to create new standard handlings and robots (Fig. 1).The complexity of parallel robots requires the use of virtual prototyping methods.Fig. 1. Prototypes of servo-pneumatic driven multi-axes machinesPreferred applications are fast multipoint positioning tasks in 3-D space. Free programmable stops allow a flexible employment of the machine. The point to point (ptp) accuracy is about 0.5 mm. The continuous path control guarantees collision free movement along a trajectory.1.1. Why parallel robots?The main benefits using parallel instead of serial kinematics is shown in Fig. 2.Fig. 2. Benefits of robots with parallel kinematicsHigh dynamical performance is achieved due to the low moved masses. While in serial robots the first axis has to move all the following axes, the axes of a parallel robot can share the mass of the workpiece. Furthermore serial axes are stressed by torques and bending moments which reduces the stiffness. Due to the closed kinematics the movements of parallel robots are vibration free for which the accuracy is improved. Finally the modular concept allows a cost-effective production of the mechanical parts. On the other hand there is the higher expense related to the control.1.2. Why Pneumatic Drives?The advantages of servo-pneumatic drives are:direct drives→high accelerating powercompact (especially rodless cylinders with integrated guidance)robust and reliablecost-effectiveDirect drives imply a high acceleration power due to the low equivalent mass in relation to the drive force. With pneumatic drives the relationship is particularly favorable. Festo has already built up some system solutions, predominantly parallel robots (see Fig. 1), to demonstrate the technical potential of servo-pneumatics. Which performance can be reached is shown in Fig. 3. This prototype is equipped with an advanced model based controller that makes use of the computed torque method [ 3].Fig. 3. Performance of the Tripod2. Design MethodThe system design, where several engineering disciplines are involved in, requires a holistic approach. This method is the so-called mechatronic design. The components of a mechatronic system are the mechanical supporting structure, the servo drives as well as the control. All these components are mapped into the computer and optimized with respect to the mutual interaction. This procedure can be used to analyze and improve existing systems as well as to create new systems. The two main steps of the mechatronic design are first building models in each discipline, and secondly the analysis and synthesis of the whole system. These steps are done in a cycle for the optimization.The modeling can be carried out in two ways: Either you apply one tool to build up models in all disciplines, but with restrictions. The other way is to use powerful tools in each discipline and to analyze the whole system viaco-simulation. In this case you have to consider some specials of the solving method like communication step size or direct feedthrough behavior.2.1. Why Co-Simulation?Co-simulation is used because of the powerful tools, each specialized in its own discipline. ADAMS is an excellent tool for the mechanical part and Matlab/Simulink is the suitable tool for controller development and simulationof pneumatics.The behavior of the mechanical part is modeled at best usingADAMS/View. The advantages of ADAMS are:fast physically modeling of rigid and elastic bodiesextensive features for parameterizationanimation of simulation resultssolving inverse kinematics by “general point motion”visualization of eigenmodes (ADAMS/LINEAR)export of linear models (A,B,C,D)A big advantage is the automatic calculation of the direct and inverse kinematics. The direct kinematics of parallel structures often cannot be solved analytically. Furthermore different kinematics can be compared to each other very easily when you define a trajectory of the end-effector via “general point motion”.Applying these two software tools guarantees a high flexibility regarding the design of new systems. It is very important to analyze the closed loop behavior at an early stage. This makes a big difference between the mechatronic design and the conventional design. Furthermore the visualization of the mechanical system makes the discussion within a team very easy.2.2. RestrictionsA disadvantage is that the model of the mechanics is purely numerically available. However some symbolic code of the mechanical system is needed for the control hardware when the system becomes realized. In general we have to derive the equations of the inverse kinematics, which are used in the feed forward control. For specific robot types a controller with decoupling structure is necessary in order to fulfill the requirements. Then the symbolic code of the dynamics is needed. For this we have to pull up further tools to complete the task.2.3. What has to be analyzed?For the design of new robots it is important to know about the effect on the system stability and accuracy. The main properties that influence stability and accuracy are opposed in Table 1 for different kinematical structures.Table 1: Properties of different kinematical configurationsWith respect to the control the cartesian type is the best one. But the main disadvantage of a serial robot compared with a parallel one is the lower dynamics and the lower stiffness (see Fig. 2).Depending on the requirements with regard to dynamics and accuracy different control approaches must be applied. As mentioned above we prefer to employ a standard controller SPC200 for a single axis. Due to the coupling of the axes the stability of the closed loop system must be checked.3. Model of the TripodThe model of the Tripod consists of three parts: the mechanics, the pneumatic drives, and the controller.3.1. Mechanics (ADAMS)We apply the so-called delta-kinematics which causes a purely translational movement of the tool center point (tcp). An additional rotary drive allows the orientation of the gripper in the horizontal plane. Together with the rotary drive the machine has four degrees of freedom.Fig. 4. Degrees of freedom and structure of the TripodThe tripod is modeled using rigid body parts what is often sufficient for the present type of parallel structure. The upper and lower plates are fixed to ground. The profile tubes are connected to these plates via fixed joints. Eachslider has one translational degree of freedom. Both ends of a rod are connected to the neighbored parts by universal joints. Including the rotary drive, the model verification results in four Gruebler counts and there are no redundant constraints. The model is parameterized in such a way that different kinematical configurations can be generated very easily by means of design variables. The most important parameters are the radiuses of the plates (see Fig. 4) and the distances to each other. For instance the following configurations can be achieved just by variation of these parameters or design variables.Fig. 5. Variation of kinematics by “design variables”3.2. Servo-Pneumatic Drives (Simulink)The models of the servo-pneumatic drives are developed by means of Matlab/Simulink. Depending on the requirements several controller models were developed. It is common to all that they are highly non-linear. Mainly the compressibility of air makes a more complex control system necessary. All controller models including the standard controller SPC200 are available asC-coded s-functions. This allows to use the same code in the simulation as well as on the target hardware.A survey of the control scheme is shown in Fig. 6. For this contribution it is important to know about the interface for the co-simulation. The calculated forces of the servo pneumatics are the inputs to the mechanics. The slider positions are the outputs of the mechanics. Detailed information on the controllers can be found in [ 2] and [ 3].Fig. 6. Control structure4. Analyzing the behavior of the whole systemWhen the modeling is done we can go on with the second step of the mechatronic design. In the following it is assumed that the SPC200 controller always controls the machine. The task is the analysis and synthesis of different parallel kinematics relative to stability, dynamics, and accuracy for a given workspace.Some studies, e.g. concerning the workspace, can be made exclusive using ADAMS. Others such as feedback analysis are carried out by means of co-simulation.The workspace can be determined by varying all drive positions in all combinations. After simulation the end-effector positions are traced using the feature “create tracespline”.Fig. 7. Drive motions for the workspace calculationThe data can be visualized in ADAMS or any other graphics tool. As an example the workspace of the Tripod configuration of Fig. 7 is represented in Fig. 8Fig. 8. Workspace of the Tripod (configuration as in Fig. 7)Measuring the velocity of the end-effector at the same time delivers the gear ratios of all drives over the workspace.To examine the behavior of the closed loop system ADAMS/Controls is used to couple ADAMS and Simulink. Before the model can be exported some inputs and outputs of the plant must be defined by state variables. The inputs of the Tripod are the drive forces. Though the controller makes only use of the drive position some additional signals are defined as outputs: The drive velocities are needed for solving the differential equations of the pressures in the pneumatics model. Furthermore we need the velocity of the tool center point to calculate the non-linear gear ratios. Finally the drive accelerations serve for the calculation of the equivalent moved masses. The whole system is shown in Fig. 9.Fig. 9. Model of the whole systemThe model of the mechanics is embedded in Simulink. ADAMS/Controls makes the interface available by means of s-function.The equivalent moved masses depend on the positions of drives. The non-linearity of the robot grows with the strength of this dependency. As shown in Table 1 with the parallel kinematics there is a medium strong coupling of the dynamics. This coupling is neglected, if we use the standard SPC200 controller. Nevertheless there is an influence on the stability of the closed loop system. To initialize and parameterize this controller we need the followinginformation from the mechanics model:equivalent moved mass of each drive (depends on slider positions) gravity forces in initial positionCoulomb and viscous frictionThe controller is designed for a single axis with a constant mass. Due to the position dependency of the equivalent moved masses of the robot we have to choose an average value for each drive. Unfortunately with ADAMS there is no easy way to calculate the equivalent moved masses along a trajectory. We tried to apply different methods such as dividing a drive force by itsacceleration during a slow motion, but this method yielded not in satisfying results. The best method found is the linearization of the system. However this requires ADAMS/Linear. When we define the drive accelerations as plant outputs in ADAMS/Controls the direct feed through matrix D of the exported linear system delivers the mass matrix in the defined operating point as1)()(-⋅=q q D f M Corresponding to the three degrees of freedom of the rigid body system the size of the mass matrix M(q) is three by three. It depends on the vector of the generalized coordinates of the drives. The non-diagonal elements cause the coupling between the axes. The factor f depends on the units chosen for the inputs and outputs. Whenthe forces are given in [N] and the accelerations are given in [mm/s 2] f is 0.001.With a slider mass of 2 kg and an end-effector mass of 2 kg the mass matrix for the three positions shown in Fig. 10 are:The gravity forces can be calculated very easily by static simulation. Likewise it is easy to model the friction in ADAMS. Nevertheless the parameters can differ very strong from one application to another one.With the parameterized controller the stability should be checked inseveral operating points by means of eigenvalues and the dynamics of the closed loop system can be analyzed by means of frequency responses.Of course with a robust controller you can start with a simulation in time domain. This gives information about the accuracy and system limits. For this we need the references for the drives. For a reference trajectory of the tool center point ADAMS applying the “general point motion” can generate the drive positions.Fig. 10. Solving inverse kinematics by feature "general point motion"In the following the simulation results are presented for a tripod configuration shown in Fig. 10. The workspace of this machine is illustrated in Fig. 8.Fig. 11. Left: Trajectory of the tool center point. Right: Drive references and measures5. ConclusionThe coupling of the software tools ADAMS and Simulink via co-simulation is a powerful method of virtual prototyping. This method enables an efficient design and optimization of servo-pneumatic driven robots. Especially robots with parallel kinematics can be analyzed very fast using ADAMS. Due to the potential of the linear analysis the use of ADAMS/Linear is meaningful. Particularly with controlled systems the linear analysis is required.Literature[ 1] Kuhlbusch, W., Moritz, W., Lückel, J., Toepper, St., and Scharfeld, F.: T RI P LANAR - A New Process-Machine Type Developed by Means of Mechatronic Design. Proceedings of the 3rd International Heinz Nixdorf Symposium on Mechatronics and Advanced Motion Control, Paderborn, Germany, 1999.[ 2] Neumann, R., Göttert, M. Ohmer, M.: Servopneumatik – eine alternative Antriebstechnik für Roboter, Robotik 2002, 19-20. Juni in Ludwigsburg, Germany, 2002, VDI-Bericht Nr. 1679 p. 537-544.[ 3] Neumann, R., Leyser, J., Post, P.: Simulationsgestützte Entwicklung eines servopneumatisch angetriebenen Parallelroboters. TagungsbandSIM2000 – Simulation im Maschinenbau, Dresden, Germany, 2000, p.519-536.。