悬臂梁,有限元分析01
双晶压电悬臂梁发电装置的建模与有限元仿真分析
21 0 0年 9月
文 章 编 号 :0 13 9 (0 0 0 — 0 30 10 — 9 7 2 1 )9 00 — 3
机 械 设 计 与 制 造
Ma h n r De i n c iey sg & M a ufc u e n a tr 3
双 晶压 电悬臂 梁发 电装置的建模 与有 限元仿真分析
i附近 输出 压最大。 定的激励条件下为 电 在固 提高双晶压电悬 臂梁的 放电能力, 应该在保证可靠 度和固 l 有
;频率的前提下, 尽量增加梁的长度、 减小梁的宽度, 并选取合适的金属板与压电陶瓷的厚度。
; j 关键词 : 压电悬臂梁 ; N Y ; A S S 发电; 耦合场; 谐响应 【 bt c】 ae e ho peol tcy n e oya ie u i i m t m t A s at B sdo t er o i e c i tadt r dnmc q i r m, a e ac r n h t y f z e r i h m l u b h i
l
g eew s c h me h a ic t oaenih az b am o1 P r 乩sd eal 。gm o dr h e l 砒 yt c m P dT . eh lna h c ti t
; bm rhc tee eeaos ba ai l lc i oaeaon hrnfeunyI e xdi- ; io a ivr nr r otnm xmaeetc vl u di eet q ec.nt e p n l g t i ra t r l g n r hf i n
; s utr i fbm rhcni vraeaa zdad tei uneo t cua i dteecig ; t cua s eo iop atee n ye ,n h n ec s utr s ea h xin r l z l r l l f f r l z n t
悬 臂 梁 的 有 限 元 分 析

悬臂梁的有限元分析
1 几何模型
在部件中新建一个几何模型,类型为可变性,形状为实体,类型为拉伸,模型空间为三维。
在网格线中画一个5ⅹ5的正方形,进行拉伸,拉伸长度为47。
图1.1 几何建模过程图
如图所示,模块创立好
图1.2 几何建模图
2 材料属性
1)在模块列表中选择属性功能模块,按照步骤,先创建材料(材料类型为钢)。
2)材料行为选择为弹性,同时弹性模量为200e3MPa,泊松比为0.3
3)创建截面属性,保持默认参数不变,点击继续
4)给部件赋予截面属性
图2.1 材料属性
3定义装配件
在左上角的模块列表中选择装配功能模块,点击默认参数。
4设置分析步
选择分析步模块,取名为step-1,分析步类型为静力,通用。
其余默认-点击继续
图4.1 分析步
5.载荷与边界
1)施加载荷点击创建载荷,将分析步载荷类型设置为压强,其余参数为默认,点击继续,
选择平板上平面,压强大小为0.188
2)选择长方体做平面制定约束
图5.1 载荷与边界
6划分网格
在模块列表中选择网格功能模块,注意划分网格是为部件划分,而不是为装配件划分。
如图,单元类型为CPS4R:四结点双线性平面应力四边形单元,
如图,单元数为1175,结点总数为1728
7分析结果
7.1应力变形云图
7.2位移变形云图
8分析结果
如图所示,Smax=3.82e1<113根据第四强度理论,该平板不会发生断裂。
双材料悬臂梁热力耦合的有限元分析
元分析 .
1 基本 方 程
在本 文 的研 究 中 , 假设 双材 料悬 臂梁 在热载 和均 布载 荷作 用下 的应 力 、 移 问题 , 位 在 —z平 面 内
( c ol f e hncl nier g D l nJa o gU i r t,a a 10 8 C ia S ho o c ai gne n , aa i T n n esy D l n16 2 , hn ) M aE i i o v i i
Absr t: s d o wo di nso a h oy O o t u ie r lto n n — i nso lc n c tac Ba e n t — me i n lte r lc ns t tv eain a d o e dme ina o d介 : 秀娟 (9 1 , , 张 17 一) 女 副教授 , 士 博
维普资讯
r o o e t. i c mp n n s l a Ke r s i t r l a t e e b a ;te o me h n c c u l g e u n il o p i g y wo d :b — e a c n lv r e m h r — c a ia o p i ;s q e t c u l ma i i m l n a n
顺序耦合法和直接耦合法采用顺序耦合法进行热力耦合分析时是将分析过程分成热分析和力分析两个过程通过将一个分析的结果作为另一个分析的载荷进行施加来耦合两个物理场由于本例中耦合情况的相互作用非线性不是很高采用顺序耦合法更高效更灵活且当不同物理场间的迭代不断进行直到达到了希望的收敛准则耦合是递归的因此本文采用了顺序耦合法进行双材料悬臂梁的热力耦合分析其分析过程为
悬臂梁结构动力响应分析与优化设计
悬臂梁结构动力响应分析与优化设计悬臂梁是一种常见的结构形式,在工程中有广泛的应用。
然而,由于其特殊的结构特点,悬臂梁在受到外界力作用时容易发生动力响应,影响其安全性和稳定性。
因此,对悬臂梁结构进行动力响应分析与优化设计,对于确保结构的安全性和可靠性至关重要。
悬臂梁结构的动力响应分析是指通过数学建模和计算分析对悬臂梁在受到外界力作用下的响应情况进行评估。
在进行动力响应分析时,需要考虑诸如结构的质量、刚度等参数。
通常,可以利用有限元方法对悬臂梁进行动力响应分析。
有限元方法是一种通过将结构离散为有限个小单元,然后对每个小单元进行力学计算,并将计算结果进行组合得出整体结构响应的数值计算方法。
通过有限元分析,可以得出悬臂梁受力情况、变形情况等重要参数,对于结构的合理设计和改进提供科学依据。
在动力响应分析的基础上,进行悬臂梁结构的优化设计是为了提高其动力响应性能。
悬臂梁的优化设计要考虑多个因素,包括结构的材料性能、几何形状、截面尺寸等。
在材料性能方面,通常需要选择具有较高强度和刚度的材料,以保证结构的承载能力。
在几何形状和截面尺寸方面,通过合理选择和设计,可以减小结构的质量和惯性矩,从而降低悬臂梁的动力响应。
对于悬臂梁结构的优化设计,常见的方法是结构拓扑优化和参数优化。
结构拓扑优化通过改变梁的支座位置、截面形状等来优化悬臂梁结构。
参数优化则是在已定形状的基础上,优化截面尺寸、材料性能等参数,以达到优化结构动力响应的效果。
这两种方法既可以分开进行也可以结合使用,通过多次计算和比较来找到最优的结构设计方案。
悬臂梁结构动力响应分析与优化设计是一个综合性和复杂性的工程问题。
在实际工程中,需要综合考虑结构的静力和动力响应,还要考虑材料的可获得性、成本等因素。
因此,对悬臂梁结构进行动力响应分析与优化设计需要多学科的知识和专业工具的支持。
只有通过科学的方法和综合考虑各种因素,才能得到结构性能和经济性的双重保证。
总之,悬臂梁结构动力响应分析与优化设计对于确保结构的安全性和可靠性具有重要意义。
用有限元法对悬臂梁分析的算例算例
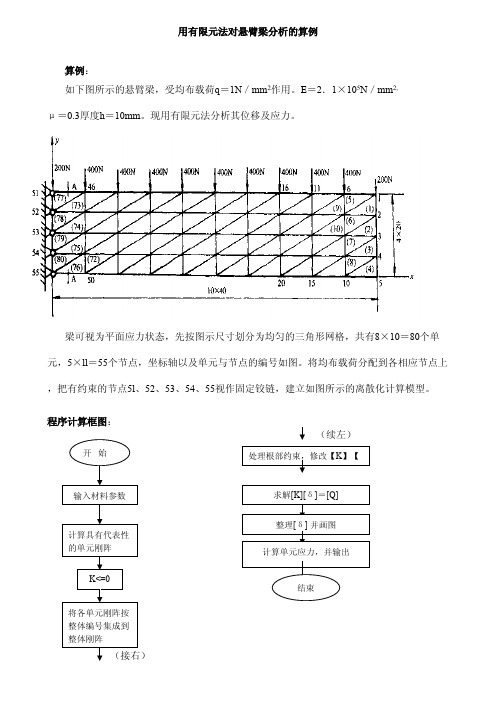
用有限元法对悬臂梁分析的算例算例:如下图所示的悬臂梁,受均布载荷q =1N /mm 2作用。
E =2.1×105N /mm 2,μ=0.3厚度h =10mm 。
现用有限元法分析其位移及应力。
梁可视为平面应力状态,先按图示尺寸划分为均匀的三角形网格,共有8×10=80个单元,5×ll =55个节点,坐标轴以及单元与节点的编号如图。
将均布载荷分配到各相应节点上,把有约束的节点5l 、52、53、54、55视作固定铰链,建立如图所示的离散化计算模型。
程序计算框图:(续左)程序中的函数功能介绍及源代码1.LinearTriangleElementStiffness(E,NU,t,xi,yi,xj,yj,xm,ym)――该函数用于计算平面应力情况下弹性模量为E、泊松比为NU、厚度为t、第一个节点坐标为(xi,yi)、第二个节点坐标为(xj,yj)、第三个节点坐标为(xm,ym)时的线性三角形元的单元刚度矩阵.该函数返回6×6的单位刚度矩阵k.2.LinearTriangleAssemble(K,k,i,j,m)――该函数将连接节点i,j,m的线性三角形元的单元刚度矩阵k集成到整体刚度矩阵K。
每集成一个单元,该函数都将返回2N×2N的整体刚度矩阵K.3.LinearTriangleElementStresses(E,NU,t,xi,yi,xj,yj,xm,ym,u)-- 该函数计算在平面应力情况下弹性模量为E、泊松比为NU、厚度为t、第一个节点坐标为(xi, yi)第二个节点坐标为(xj,yj)、第三个节点坐标为(xm,ym)以及单元位移矢量为u时的单元应力。
该函数返回单元应力矢量。
函数源代码:function y = LinearTriangleElementStiffness(E,NU,t,xi,yi,xj,yj,xm,ym)A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;%三角形单元面积,单元节点应该按逆时针排序,保证每个三角形单元的面积都为正值(也可作为一个小函数:LinearTriangleElementArea)betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);%B为应变矩阵,其中betai=yi-ym,betaj=ym-yi,betam=yi-yj.gammai=xm-xj, gammaj=xi-xm, gammam=xj-xi.D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];%D为弹性矩阵,分为平面应力问题和平面应变问题对于平面应力问题D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];对于平面应变问题E1=E/(1-NU*NU),NU1=NU/(1-NU)y = t*A*B'*D*B;%单元刚度矩阵function y = LinearTriangleAssemble(K,k,i,j,m)K(2*i-1,2*i-1) = K(2*i-1,2*i-1) + k(1,1); K(2*i-1,2*i) = K(2*i-1,2*i) + k(1,2);K(2*i-1,2*j-1) = K(2*i-1,2*j-1) + k(1,3); K(2*i-1,2*j) = K(2*i-1,2*j) + k(1,4);K(2*i-1,2*m-1) = K(2*i-1,2*m-1) + k(1,5); K(2*i-1,2*m) = K(2*i-1,2*m) + k(1,6);K(2*i,2*i-1) = K(2*i,2*i-1) + k(2,1); K(2*i,2*i) = K(2*i,2*i) + k(2,2);K(2*i,2*j-1) = K(2*i,2*j-1) + k(2,3); K(2*i,2*j) = K(2*i,2*j) + k(2,4);K(2*i,2*m-1) = K(2*i,2*m-1) + k(2,5); K(2*i,2*m) = K(2*i,2*m) + k(2,6);K(2*j-1,2*i-1) = K(2*j-1,2*i-1) + k(3,1); K(2*j-1,2*i) = K(2*j-1,2*i) + k(3,2);K(2*j-1,2*j-1) = K(2*j-1,2*j-1) + k(3,3); K(2*j-1,2*j) = K(2*j-1,2*j) + k(3,4);K(2*j-1,2*m-1) = K(2*j-1,2*m-1) + k(3,5); K(2*j-1,2*m) = K(2*j-1,2*m) + k(3,6);K(2*j,2*i-1) = K(2*j,2*i-1) + k(4,1); K(2*j,2*i) = K(2*j,2*i) + k(4,2);K(2*j,2*j-1) = K(2*j,2*j-1) + k(4,3); K(2*j,2*j) = K(2*j,2*j) + k(4,4);K(2*j,2*m-1) = K(2*j,2*m-1) + k(4,5); K(2*j,2*m) = K(2*j,2*m) + k(4,6);K(2*m-1,2*i-1) = K(2*m-1,2*i-1) + k(5,1); K(2*m-1,2*i) = K(2*m-1,2*i) + k(5,2);K(2*m-1,2*j-1) = K(2*m-1,2*j-1) + k(5,3); K(2*m-1,2*j) = K(2*m-1,2*j) + k(5,4);K(2*m-1,2*m-1) = K(2*m-1,2*m-1) + k(5,5); K(2*m-1,2*m) = K(2*m-1,2*m) + k(5,6);K(2*m,2*i-1) = K(2*m,2*i-1) + k(6,1); K(2*m,2*i) = K(2*m,2*i) + k(6,2);K(2*m,2*j-1) = K(2*m,2*j-1) + k(6,3); K(2*m,2*j) = K(2*m,2*j) + k(6,4);K(2*m,2*m-1) = K(2*m,2*m-1) + k(6,5); K(2*m,2*m) = K(2*m,2*m) + k(6,6);K;%对号入座,如前所述,每集成一次都将返回2N×2N的整体刚度矩阵K.此题为110×110 function y = LinearTriangleElementStresses(E,NU,t,xi,yi,xj,yj,xm,ym,u)A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];%平面应力和平面应变问题两种情况y = D*B*u;%单元应力计算主程序源代码E=21e7;NU=0.3;t=0.01;stifflike5=LinearTriangleElementStiffness(E,NU,t,0.4,0.08,0.36,0.08,0.36,0.06,1) %选取2个基本单元,调用M文件stifflike1=LinearTriangleElementStiffness(E,NU,t,0.4,0.08,0.36,0.06,0.4,0.06,1) K=sparse(110,110); %creat a xishu matrix for total stiff创建一个稀疏矩阵for i=1:49if rem(i,5)%模取余,bool型变量,非零即为真j=i;K=LinearTriangleAssemble(K,stifflike5,j,j+5,j+6);%节点编号K=LinearTriangleAssemble(K,stifflike1,j,j+6,j+1);endend%将每个单元刚度矩阵集成到总刚中K=full(K);%转化稀疏矩阵 k=K(1:100,1:100);k=[K,zeros(100,10);zeros(10,100),eye(10)];k=sparse(k);%利用边界条件简化基本方程Q=sparse(2:10:92,1,[-200,-400,-400,-400,-400,-400,-400,-400,-400,-400,],110,1);%外部荷载,此处不包括约束条件,通过形函数确定,是不是可以理解为梁的两端为中间的一半呢?d=k\Q;%高斯消元法,比克莱姆法则在计算速度上有绝对的优势!x=0:0.04:0.4;plot(x,d(106:-10:6))%基本绘图命令grid%带网格y=zeros(80,3);q=0;for i=1:49switch rem(i,5)case 1j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.08;xm=0.36;ym=0.06;xn=0.4;yn=0.06;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)';xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 2j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];xl=0.4;yl=0.06;xm=0.36;ym=0.04;xn=0.4;yn=0.04;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 3j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.04;xm=0.36;ym=0.02;xn=0.4;yn=0.02;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 4j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.02;xm=0.36;ym=0;xn=0.4;yn=0;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;otherwiseq=q+3;endendq=4;for i=1:49switch rem(i,5)case 1j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.08;xm=0.36;ym=0.08;xn=0.36;yn=0.06;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 2j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.06;xm=0.36;ym=0.06;xn=0.36;yn=0.04;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 3j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.04;xm=0.36;ym=0.04;xn=0.36;yn=0.02;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 4j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.02;xm=0.36;ym=0.02;xn=0.36;yn=0;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)';xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;otherwiseq=q+3;endend %y(i+q,:)这是实现什么的?没见过这种用法,算法上应该就是通过节点位移实现指定单元的内力,这部分本人看的也晕晕的,望高人指点N=y(73:80,1)结果图及数据输出悬臂梁轴线挠度图:一单元的单元刚阵1.0e+006 *0.8077 0 0 -0.4038 -0.8077 0.40380 2.3077 -0.3462 0 0.3462 -2.30770 -0.3462 0.5769 0 -0.5769 0.3462-0.4038 0 0 0.2019 0.4038 -0.2019-0.8077 0.3462 -0.5769 0.4038 1.3846 -0.75000.4038 -2.3077 0.3462 -0.2019 -0.7500 2.5096五单元的单元刚阵1.0e+006 *00.050.10.150.20.250.30.350.4x/m w /m0.5769 0 -0.5769 0.3462 0 -0.34620 0.2019 0.4038 -0.2019 -0.4038 0-0.5769 0.4038 1.3846 -0.7500 -0.8077 0.34620.3462 -0.2019 -0.7500 2.5096 0.4038 -2.30770 -0.4038 -0.8077 0.4038 0.8077 0-0.3462 0 0.3462 -2.3077 0 2.3077根部73-80各单元应力计算结果如下(n/m2):1.0e+007 *2.1119 -0.0621 -2.2816 -4.8824 5.0479 2.4065 0.0352 -2.3753。
悬臂梁的受力分析
悬臂梁的受力分析实验目的:学会使用有限元软件做简单的力学分析,加深对材料力学相关内容的理解,了解如何将理论与实践相结合。
实验原理:运用材料力学有关悬臂梁的的理论知识,求出在自由端部受力时,其挠度的大小,并与有限元软件计算相同模型的结果比较 实验步骤: 1,理论分析如下图所示悬臂梁,其端部的抗弯刚度为33EIl ,在其端部施加力F ,可得到其端部挠度为:33Fl EI ,设其是半径为0.05米,长为1米,弹性模量11210E =⨯圆截面钢梁,则其可求出理论挠度值3443Fl ERωπ=,先分别给F 赋值为100kN ,200kN ,300kN ,400kN ,500kN .计算结果如下表:F 100000 200000 300000 400000 500000 ω(m )0. 033950. 0679060. 1018590. 13581230. 16976542有限元软件(ansys )计算: (1)有限元模型如下图:模型说明,本模型采用beam188单元,共用11个节点分为10个单元,在最有段施加力为F计算得到端部的挠度如下表所示,F 100000 200000 300000 400000 500000S(端部位移)-0.34079E-01-0.680158E-01-1.020237E-01-1.360136E-01-1.700395E-01得到梁端部在收到力为100kN时Y方向的位移云图:将理论计算结果与ansys分析结果比较如下表:力F(N)100000 200000 300000 400000 500000 理论值0. 03395 0. 067906 0. 101859 0. 1358123 0. 1697654 实验值-0.34079E-01-0.680158E-01-1.020237E-01-1.360136E-01-1.700395E-01相对误差0.37% 0.16% 0.16% 0.15% 0.16%通过比较可得,理论值与软件模拟结果非常接近,在力学的学习中只要能熟练的掌握理论知识,在软件模拟过程中便可做到心中有数,在本实验中理论值是通过材料力学中得一些假设得到的一个解析解,而实验也是用了相同的假设,并将梁离散为十个单元,得到数值解,因此和理论值的误差是不可避免的,通过增加离散单元的个数可以有效的减少误差,但是增大了计算量,因此在实践中,只要选取合适的离散单元数,能够满足实践要求即可,这就需要有更加扎实有限元知识作为指导。
悬臂梁弯扭组合变形设计案例
悬臂梁弯扭组合变形设计案例咱们来聊一个悬臂梁弯扭组合变形的设计案例,就像搭积木一样,但这个积木可是有大学问的。
想象一下,有一个机械手臂,它就像是一个悬臂梁。
这个机械手臂在工作的时候啊,可不光是受到一种力的作用,而是弯扭组合的变形情况。
一、项目背景。
这个机械手臂呢,要在一个自动化生产线上工作。
它需要伸出去抓取零件,然后再把零件放到指定的位置。
在这个过程中,手臂一端固定在机器上(这就是悬臂梁的固定端啦),另一端自由活动。
由于抓取的零件重量不一样,而且手臂运动的速度和方向也会变化,所以就产生了弯曲和扭转这两种变形情况。
二、受力分析。
1. 弯曲力。
当手臂伸出去抓取零件的时候,零件的重量就像一个小坏蛋,使劲儿地把手臂往下拽,这就产生了弯曲力。
比如说,我们抓取一个5千克的零件,假设手臂长度是1米,这个零件的重力就会在手臂上产生一个弯矩。
根据弯矩的计算公式M = FL(这里F就是零件的重力,L就是手臂的长度),那这个弯矩就是M = 5×9.8×1 = 49牛·米(这里g = 9.8米/秒²)。
这个弯矩就会让手臂像被掰弯的小树枝一样,有弯曲变形的趋势。
2. 扭转力。
然后呢,当手臂转动把零件送到指定位置的时候,这个转动就产生了扭转力。
比如说,手臂要以一定的角速度转动,就像拧麻花一样,在手臂的轴线上就会产生扭矩。
假设手臂的转动惯量是I,角加速度是α,根据扭矩的计算公式T=Iα。
如果手臂快速地转动,这个扭矩可就不小了,它会让手臂产生扭转变形。
三、材料选择。
考虑到这种弯扭组合变形的情况,我们得找个厉害的材料来做这个悬臂梁(也就是机械手臂)。
经过一番挑选,我们选择了高强度合金钢。
为啥呢?这种材料就像钢铁侠的盔甲一样,又硬又结实。
它的屈服强度高,能够承受较大的弯曲和扭转应力。
比如说,它的屈服强度可以达到800兆帕,这就意味着在这么大的压力下,材料才会开始变形得很厉害。
而且它的韧性也不错,不会轻易断裂,就像一个坚强又有弹性的战士,能够在复杂的受力情况下保持稳定。
微磨料水射流机床悬臂梁的有限元分析
9 H d14 sete I aeo rsnneiisget a tela fe unyso l w y rm 1 za 0 Hzep ci nc eoac, ugse tt h d rq ec u a a fo n r v s f ts dh o h d tentr fe unyo tee.h idt tee al l igo nuh h aua rq ec c ivr er i o c ivr vi es odeog. l f a l T g y f a l a a n i n b
明, 微磨料 水射流切割机床悬臂梁固有一阶、 二阶、 三阶和四阶频率分别为 2 H 、1 z 1 z 14 z 0 z3H 、 H 和 0 H 。 9
为 了避 免 引起 共振 , 负载频 率应 以一定 幅度错 开其 固有频 率。现有 悬臂 梁结构 具有足 够的 刚度 。 关键词 : 微磨料 ; 磨料 水射流 ; 悬臂 梁 ; 刚度 ; 模态 振型
陈廷成 戴 良博 雷玉 勇 卫排锋 王 荣娟 ( 西华大 学 机械 工 程与 自动化学 院 特种 加工研 究所 , 都 60 3 ) 成 109
Fnt lme t n lsso a te e f c o a rsv t re c iie ii ee n ay i f ni v r r ba i wae t e a c l o mi e i ma hnn
C E a — hn , AI i g b ,E u y n , I a fn , NG R n -u n H N Y n c e g D a - o L I - o gWE i e g WA o g ja Ln Y P-
( c ol f c a i l n ier g&A t t n X h a nvri , h n d 0 9 C ia Sh o o h nc g ei Me aE n n uo i , iu i sy C e gu6 3 , hn ) ma o U e t 1 0
悬臂梁有限元优化分析
悬臂梁优化分析班级:姓名:学号:指导老师:目录一、条件分析 (1)二、分析步骤 (1)(一)前处理阶段: (1)(二)求解阶段 (3)(三)后处理阶段 (4)(四)优化阶段 (9)三、优化结果 (13)(一)读取优化结果列表 (13)(二)选择优化结果 (13)(三)代入结果分析 (14)四、整理命令流 (14)参考文献 (17)一、条件分析由题可知:悬臂梁中的平均应力小于MPa 30,且梁的挠度小于1厘米。
而且横截面积约束条件为:cm X cm 2.1651≤≤,cm X cm 2.41202≤≤。
(考虑学号系数),连杆的材料属性为:杨氏模量Pa E 91012.30⨯=,泊松比为0.3。
由于梁的长度一定,若要使梁的重量最小,则要求体积最小,进而可知要求横截面积,所以可确定体积是所求目标,因此可确定:设计变量cm X cm 2.1651≤≤ cm X cm 2.41202≤≤状态变量平均应力MPa 30≤σ 挠度cm 1<δ目标函数体积V二、分析步骤1. 定义工作文件名和工作标题(1) 执行[Utility Menu]\File\change Jobname 。
弹出对话框,输入panjiafeng12,并选择复选框,单击“OK ”按钮。
(2) 执行[Utility Menu]\File\Change Title 。
弹出的对话框,输入panjiafeng12,单击“OK ”按钮。
(一)前处理阶段:1. 初始化设计变量执行[Utility Menu]\File\Parameters\Scalar Parameter,弹出对话框,输入X1=0.1cm ,X2=0.3cm 。
2.定义单元类型,面积,转动惯量执行[Utility Menu]\Preprocessor\Element Type\Add\Edit\Delete 弹出对话框,选择Structural Beam 中的2D elastic 3 单击“OK ”单击“Close ”。
悬臂梁的有限元分析
工程地质数值模拟成绩考核——昆明理工大学本科生课程*****学院:国土资源工程学院科系:地科系专业:勘查111学号:************2014年11 月8 日悬臂梁的有限元分析1.问题概述。
悬臂梁为矩形截面的钢梁,长10m宽1m、高2m,不计梁的自重,弹性模量为220GPa,泊松比为0.2,在悬臂端作用一集中荷载P=1200kN。
试分析该悬臂梁的内力和变形情况。
2.启动ANSYS程序。
(1)在【开始】菜单中依次选取【所有程序】/【ANSYS8.0】/【ConfigureANSYSProducts】选项,打开【ANSYS8.0Launcher】对话框。
(2)选中【FileManagement】选项卡,输入目录名:“D:\ANSYSFX\zhang1\Exam01\ANSYSjs”,输入项目名:“Z101Beam”。
(3)单击按钮运行程序,进入ANSYS使用界面。
3.定义材料、实常数和单元类型。
(1)在【ANSYSMainMenu】菜单中依次选取【Preprocessor】(前处理)/【ElementType】/【Add/Edit/Delete】选项,打开单元类型对话框。
单击按钮,打开单元类型库对话框,在右侧两个列表框中分别选取【Beam】选项和【2Delastic3】选项(简称为Beam3单元,以后叙述中记为【Beam】-【2Delastic3】单元,类似的情况记法相同),如图1-16所示。
单击按钮,再单击【ElementType】对话框中的按钮。
图1-16【LibraryofElementTypes】对话框(2)在【ANSYSMainMenu】菜单中依次选取【Preprocessor】/【RealConstants】/【Add/Edit/Delete】选项,打开实常数对话框,如图1-17所示。
单击按钮,打开Beam3实常数对话框,按照提示输入相应的面积、惯性矩和梁高参数,如图1-18所示。
悬臂梁的有限元分析

悬臂梁的有限元分析I. 内容综述悬臂梁的有限元分析是结构工程领域中的一个重要课题,它是一种数值计算方法,通过将连续的结构分解成许多小单元,然后对每个单元进行分析,最终得到整个结构的性能指标。
这种方法可以有效地模拟结构的变形和应力分布情况,为设计和优化提供可靠的依据。
在实际应用中,悬臂梁的有限元分析需要考虑多种因素,如材料属性、几何形状、载荷条件等。
因此在进行分析时,需要选择合适的模型和网格尺寸,并对边界条件进行合理设定。
此外由于悬臂梁的结构特点,其在不同位置的受力情况也有所不同,因此需要对各个部位进行分别分析。
悬臂梁的有限元分析是一项复杂而重要的工作,只有通过合理的建模和分析方法,才能得到准确的结果,并为实际工程提供有效的指导。
A. 研究背景和意义悬臂梁作为一种常见的结构形式,广泛应用于建筑、桥梁、机械等领域。
然而在实际应用过程中,由于各种因素的影响,悬臂梁的结构性能可能会发生退化,导致结构的安全性受到威胁。
因此对悬臂梁的有限元分析具有重要的研究意义。
有限元分析是一种基于数学模型的工程分析方法,通过将复杂的结构分解为若干个简单的单元,利用计算机模拟这些单元在受力作用下的变形和应力分布,从而预测结构的响应。
近年来随着计算机技术和数学方法的不断发展,有限元分析在工程领域中的应用越来越广泛,已经成为工程设计和施工的重要工具。
对于悬臂梁这种特殊结构,有限元分析不仅可以帮助我们了解其在不同工况下的性能表现,还可以为优化结构设计、提高结构强度和刚度提供理论依据。
此外通过对悬臂梁的有限元分析,我们还可以更好地了解其在使用过程中可能出现的缺陷和损伤,从而为预防事故、保障人员安全提供技术支持。
悬臂梁的有限元分析研究具有很高的实用价值和理论意义,对于推动工程技术的发展、提高人类生活质量具有重要作用。
B. 研究目的和方法本研究旨在通过有限元分析方法,对悬臂梁进行分析,以探究其在不同荷载下的应力分布情况。
我们将采用ANSYS软件进行模拟计算,并通过对计算结果的分析,得出悬臂梁的最大应力、最小应力以及平均应力等关键指标。
二维悬臂梁有限元分析
二维悬臂梁有限元分析二维悬臂梁有限元分析是一种常用的工程结构分析方法,在工程设计和研究中具有重要的应用价值。
本文将从有限元分析的原理和步骤、模型建立、载荷及边界条件、材料特性、求解方案以及结果分析等方面进行论述,探讨二维悬臂梁有限元分析的相关内容。
首先,有限元分析是一种通过将工程结构离散化为有限个小单元,利用单元的力学性质和相邻单元之间的相互作用关系,以数值解的方式求解结构的力学行为的方法。
二维悬臂梁有限元分析的步骤包括建立有限元模型、施加载荷和边界条件、确定材料特性、选择求解方案以及分析结果。
其次,模型建立是有限元分析的关键步骤之一、对于二维悬臂梁,可以采用梁单元进行建模。
梁单元是一种可以描述梁的位移、应变和应力的基本单元,具有两个节点和四个自由度。
通过将悬臂梁划分为多个梁单元,并将其节点连接起来建立悬臂梁有限元模型。
接下来,需要施加适当的载荷和边界条件。
载荷是指在悬臂梁上施加的外部力或力矩,可以是均布载荷、集中力、集中力矩等形式。
边界条件是指限制悬臂梁位移的条件,例如支座的固定或约束。
在二维悬臂梁中,通常将一端固定,即将该节点的两个位移约束为零。
选取合适的求解方案对于二维悬臂梁有限元分析非常关键。
常见的求解方案包括静态分析和动态分析。
静态分析适用于悬臂梁在静力加载下的弯曲和变形分析,动态分析适用于悬臂梁在动力加载下的响应分析。
根据具体问题的需求,选择适当的求解方案进行计算。
最后,需要对计算结果进行分析和评估。
通过数值计算得到的位移、应变和应力等结果,可以用于评估悬臂梁的强度和刚度等性能指标。
同时,也可以通过对结果的灵敏度分析,确定影响悬臂梁性能的关键因素,为工程设计提供参考。
综上所述,二维悬臂梁有限元分析是一种重要的工程结构分析方法。
通过有限元分析,可以预测悬臂梁的力学行为,为工程设计和结构优化提供依据。
然而,为了保证分析结果的准确性,需要合理地选择模型、载荷和边界条件、材料特性,以及采用适当的求解方案,对计算结果进行合理的解释和评估。
结构计算--有限元法概念入门
有限元分析概念
有限元分析最初的思想
• 有限元法最初的思想是把一个大的结构划 分为有限个称为单元的小区域,在每一个 小区域里,假定结构的变形和应力都是简 单的,小区域内的变形和应力都容易通过 计算机求解出来,进而可以获得整个结构 的变形和应力。
有限元分析概念
• 事实上,当划分的区域足够小,每个区域 内的变形和应力总是趋于简单,计算的结 果也就越接近真实情况。理论上可以证明, 当单元数目足够多时,有限单元解将收敛 于问题的精确解,但是计算量相应增大。 为此,实际工作中总是要在计算量和计算 精度之间找到一个平衡点。
• 1.模型提炼 • 2.几何建模 • 3.画网格—离散模型 • 4.施加约束 • 5.施加载荷 • 6.单元选择 • 7.物理材料属性
处理
• 1.求解器 • 2.矩阵求解方法
后处理
• 1.单元求解结果 • 2.节点求解结果 • 3.结果列表 • 4.结果图形显示 • 5.结果动画显示
• 有限元法本质上是一种微分方程的数值求 解方法,认识到这一点以后,从70年代开 始,有限元法的应用领域逐渐从固体力学 领域扩展到其它需要求解微分方程的领域, 如流体力学、传热学、电磁学、声学等。
有限元分析意义
• 有限元法在工程中最主要的应用形式是结 构的优化(如结构形状的最优化),结构 强度的分析,振动的分析等等。有限元法 在超过五十年的发展历史中,解决了大量 的工程实际问题,创造了巨大的经济效益。 有限元法的出现,使得传统的基于经验的 结构设计趋于理性,设计出的产品越来越 精细,尤为突出的一点是,产品设计过程 的样机试制次数大为减少,产品的可靠性 大为提高。
有限元分析概念—插值函数
• 有限元法中的相邻的小区域通过边界上的 节点联接起来,可以用一个简单的插值函 数描述每个小区域内的变形和应力,求解 过程只需要计算出节点处的应力或者变形, 非节点处的应力或者变形是通过函数插值 获得的,换句话说,有限元法并不求解区 域内任意一点的变形或者应力。
悬臂梁—有限元ABAQUS线性静力学分析实例分解
线性静力学分析实例——以悬臂梁为例线性静力学问题是简单且常见的有限元分析类型,不涉及任何非线性(材料非线性、几何非线性、接触等),也不考虑惯性及时间相关的材料属性。
在ABAQUS中,该类问题通常采用静态通用(Static,General)分析步或静态线性摄动(Static,Linear perturbation)分析步进行分析。
线性静力学问题很容易求解,往往用户更关系的是计算效率和求解效率,希望在获得较高精度的前提下尽量缩短计算时间,特别是大型模型。
这主要取决于网格的划分,包括种子的设置、网格控制和单元类型的选取。
在一般的分析中,应尽量选用精度和效率都较高的二次四边形/六面体单元,在主要的分析部位设置较密的种子;若主要分析部位的网格没有大的扭曲,使用非协调单元(如CPS4I、C3D8I)的性价比很高。
对于复杂模型,可以采用分割模型的方法划分二次四边形/六面体单元;有时分割过程过于繁琐,用户可以采用精度较高的二次三角形/四面体单元进行网格划分。
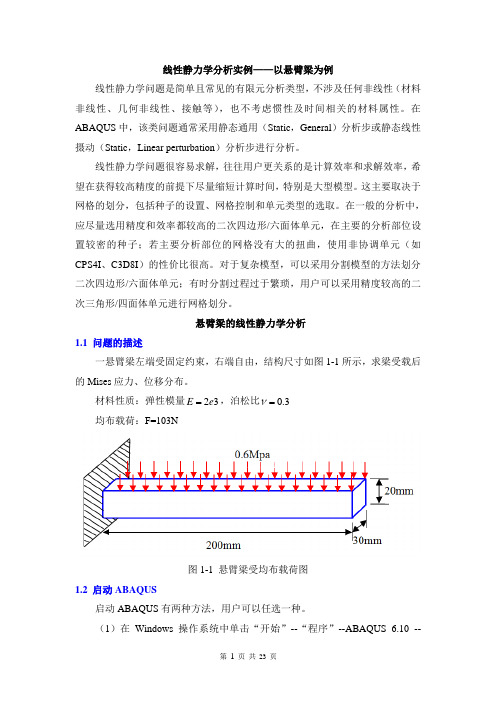
悬臂梁的线性静力学分析1.1 问题的描述一悬臂梁左端受固定约束,右端自由,结构尺寸如图1-1所示,求梁受载后的Mises应力、位移分布。
ν材料性质:弹性模量3=E=,泊松比3.02e均布载荷:F=103N图1-1 悬臂梁受均布载荷图1.2 启动ABAQUS启动ABAQUS有两种方法,用户可以任选一种。
(1)在Windows操作系统中单击“开始”--“程序”--ABAQUS 6.10 --ABAQUS/CAE。
(2)在操作系统的DOS窗口中输入命令:abaqus cae。
启动ABAQUS/CAE后,在出现的Start Section(开始任务)对话框中选择Create Model Database。
1.3 创建部件在ABAQUS/CAE顶部的环境栏中,可以看到模块列表:Module:Part,这表示当前处在Part(部件)模块,在这个模块中可以定义模型各部分的几何形体。
有限元分析(共2张PPT)

s
3、试计算下列载荷的单元等效节点力。
1、=一1/3悬,臂梁梁的,厚载度荷为均t。匀分布在自由端截面上,合力为P,采用图示网格,求各节点位移及单元应力。
1、=一1/3悬,臂梁梁的,厚载度荷为均t。匀分布在自由端截面上,合力为P,采用图示网格,求各节点位移及单t。单元等效节点力。
3、=试1/3计,算梁下的列厚载度荷为的t。单元等效节点力。
31、试一计悬算臂下梁列,载荷的均单 匀元分等布效在节自点由力端。截面上①,合力为P,采用图3示网格,求各节点位移及单元应力。
=1/3,梁的厚度为t。
112、 、=一一将1/3悬悬上,臂臂题梁梁梁的的,,悬厚载载臂度荷荷梁为均均改t。匀 匀 用分分图布布示在在的自自四由由个端端单1截截元面面的上上网,,格合合进力力行为为计算PP,,,3采采用用图图示示网网格格,,求求各各节节5 点点位位移移及及单单元元应应力力。。
作业
1、一悬臂梁,载荷均匀分布在自由端截面上,合力为P,采用图示网
格,求各节点位移及单元应力。=1/3,梁的厚度为t。
。 。。4
。 P/2 3 ②
1m
P t
。 。。1 ①
2m
。 2 P/2
2、将上题的悬臂梁改用图示的四个单元的网格进行计算,
设 = 0,试求整体刚度矩阵。
3、=试1/3计,算梁下的列厚载度荷为的t。单元等效节点力。
1、==一11//33悬, ,臂梁梁梁的 的,厚 厚载度 度荷为 为均tt。 。匀分布在自由端2 截面上,合力为P,4采用图示网格,求各节6点位移及单元应力。
3、=试1/3计,算梁下的列厚载度荷为的t。单元等效节点力。
31、 、=试一1/3计悬,算臂梁下梁的列,厚载载度荷荷为的均t。单 匀元分等布效在节自点由力端。截面上,合力为② P,采用图示网格4,求各节点位移及单元应力。
ANSYS有限元分析实例
ANSYS有限元分析实例1.悬臂梁的结构分析悬臂梁是一种常见的结构,其呈直线形式,一端固定于支撑点,另一端自由悬挂。
在这个分析中,我们将使用ANSYS来确定悬臂梁的最大弯曲应力和挠度。
首先,我们需要创建悬臂梁的几何模型,并给出其材料属性和加载条件。
然后,在ANSYS中创建有限元模型,并进行网格划分。
接下来,进行力学分析,求解材料在给定加载下的应力和位移。
最后,通过对结果的后处理,得出最大弯曲应力和挠度。
2.螺旋桨的流体力学分析螺旋桨是一种能够产生推力的旋转装置,广泛应用于船舶、飞机等交通工具中。
螺旋桨的流体力学分析可以帮助我们确定其叶片的受力情况和推力性能。
在这个分析中,我们需要建立螺旋桨的几何模型,并给出流体的流速和压力条件。
然后,我们在ANSYS中创建螺旋桨的有限元模型,并进行网格划分。
通过求解流体场方程,计算叶片上的压力分布和受力情况。
最后,通过对结果的后处理,得出叶片的受力情况和推力性能。
3.散热片的热传导分析散热片是一种用于散热的装置,广泛应用于电子设备、电脑等领域。
散热片的热传导分析可以帮助我们确定散热片在给定热源条件下的温度分布和散热性能。
在这个分析中,我们需要建立散热片的几何模型,并给出材料的热导率和热源条件。
然后,我们在ANSYS中创建散热片的有限元模型,并进行网格划分。
通过求解热传导方程,计算散热片上各点的温度分布。
最后,通过对结果的后处理,得出散热片的温度分布和散热性能。
以上是三个ANSYS有限元分析的实例,分别涉及结构分析、流体力学分析和热传导分析。
通过这些实例,我们可以充分展示ANSYS在不同领域的应用,并帮助工程师和科研人员解决工程问题,提高设计效率和产品性能。
悬臂梁大变形的向量式有限元分析
d s a e n s o t i d a c r i o i tr a o a o c n q i ae tma so a lm e t a d t e iplc me ti b ane c o d ngt n e ln d fr ea d e u v n s ff me e e n s n h n l l r
a c mp t t n p o e u e whih i r g a o u ai r c d r c sp o r mme ORTRAN.Th o o d by F e c mpu ain r s t e c n itn t tto e ul a o sse twi sr h t e t e r tc ou in.T e meho a s d t e f r t esmulto d a a y i fl g a t e e h h o eia s l to h t d c n beu e o p ro m h i l ain a n sso a e c n i v r n l r l
ee n meh d s s d o l me t to i u e t dic eie tu t r s nt p ril s se a d ik g ee n s mo g s r t sr cu e i o a t e y t ms n l a e l me t a n z c n
悬臂梁模态分析范文

悬臂梁模态分析范文悬臂梁是一种常见的结构形式,广泛应用于建筑、机械、航空航天等领域。
悬臂梁的模态分析是对其自由振动特性进行研究的一种方法。
通过模态分析,可以确定悬臂梁的固有频率和模态形态,为设计和优化悬臂梁结构提供依据。
悬臂梁的自由振动方程可以表示为:$$(EI \frac{d^4u(x)}{dx^4} + \rho A \frac{d^2u(x)}{dt^2}) =0$$其中,u(x)是悬臂梁的振动位移,x是悬臂梁上的坐标,E是弹性模量,I是惯性矩,$\rho$是材料密度,A是悬臂梁的截面面积。
为了求解悬臂梁的自由振动方程,需要确定边界条件。
通常情况下,悬臂梁一端固定,另一端自由。
边界条件可以表示为:$$u(0)=0$$$$M(0)=0$$$$\frac{d^2u(x)}{dx^2},_{x=0} = 0$$其中,u(0)表示悬臂梁一端的振动位移,M(0)表示悬臂梁一端的弯矩。
对于悬臂梁的模态分析,通常采用有限元分析的方法。
有限元分析将悬臂梁离散为多个小单元,每个单元的振动位移可以近似为一个简单的函数。
通过将每个小单元的振动位移组合起来,可以得到整个悬臂梁的振动位移。
然后,通过将振动位移代入自由振动方程,可以得到一个特征值问题,即求解固有频率和模态形态。
在实际应用中,可以使用计算软件进行悬臂梁的模态分析。
常用的计算软件包括ANSYS、ABAQUS等。
这些软件提供了丰富的模态分析功能,可以快速、准确地求解悬臂梁的固有频率和模态形态。
模态分析结果可以用于评估悬臂梁结构的稳定性和安全性。
通过分析不同模态的振动形态,可以判断悬臂梁的潜在共振点和结构弱点。
在设计和优化悬臂梁结构时,可以根据模态分析结果进行结构改进,以提高悬臂梁的抗风、抗震能力。
总之,悬臂梁模态分析是对悬臂梁自由振动特性进行研究的重要方法。
通过模态分析,可以确定悬臂梁的固有频率和模态形态,为结构设计和优化提供依据。
利用计算软件进行模态分析可以提高分析效率和精确度,为工程实践提供技术支持。
悬臂梁的有限元分析
Gnhu 310) a zo 4 0 0
摘
要:运 用有限元 的思想,将 悬臂 梁化成 若干三角形单元 ,考 虑其单元 的位移模 式 以及形态 函数后 ,通过能量法 ,
得到单元的刚度矩阵 ,而后对其进行整体分析 ,包括整体 刚度矩阵的建立 以及边 界条件 的引入等等。详细讨论 了悬臂梁的位
移 以及应力和应变的变化情况,可以看 出有 限元针对 此问题 的收敛性很好 。
0 引言
工具 ,得到力学模 型受载后 的静态特性,如应力场 、位移场 等 ;动态特性,如 固有频率 、振型等力学特性。在本文 巾, 运用能量法 以及通过引入形态 函数的方法 , 讨论了悬臂梁在 竖向荷载作用下的位移 以及应力应变的变化情况, 以看出 可 有限元针对此 问题 的收敛性很好, 对工程应用有很大的指导
、
\
、
\
\ \
\
、
、 \ \
、
、
\
\
\
\
、
\、
、
、 、
\
、
、
\ \ -
、
\ 、 \
、
\ 、
、
\
、
\
\
\ \
、
\
\ 壹 、
、
‘I 、 I 、 、 \ \ \ \ \ _ 、、 、 、? ’ \ \ \ 、|、 、 - ' 、 ~ q 、
性意 义 。 1 有 限 元 思 想
有 限元法是一种将复杂对象进行合理 的离散,应用力学
论和计算机技术解决复杂 问题的数值分析方法, 对于众多 难以获得解析解问题的分析具有明显的优点, 在科学研究和 工程计算 巾得到广泛的应用 。在工程领域 巾,随着对设计的 安全性 系数越来越高,于是对工程元件的精度提 出了更精确 的要求 。 运用有限元的方法去进行数值模拟,以便更好地达