车灯线光源的优化设计(第二组)
车灯线光源的优化设计

$’ $’ $’$%-%/$$&’(&")$*%/"(%$)% % $!$’-%/0(%$%%* *’/&$%&(%$! %& "* "$ ’$ ## -$ $$$’$’-%/0(%$%%*%&$ %$$)-%/&$$1(%$"$-%/&(%$)%%
! "
#
$
$! %
将 "#%& 代入直线方程 $!%" 得出此直线与线光源所在直线的交点 2 的坐标 $3# "%&%& 这样 "2 点发出的 光 " 只 有沿 (+# .(,# 的才能 到达 +., 点 & 从而 " 也就可以得 到满足要 求的线光源 长度 " 其优化 结果是 #
’
已知+ 点和 , 点的坐标分别是 $%"’&$%& %" 对应+ 点 "% #%)$$ "对应 ,点 "%#’"$$& 过 + 点或 , 点 " 且垂直于 $) % "# )$% -’&$%&* )$# $ $ 在方程 $) %的直线上 " 点+.,关于切线的对称点+#.$# 的坐标可以求出 & 从而可以得到过点+#.$# 和( 的直 线方程如下 #
) 9’ *
湖北汽车工业学院学报
!""! 年 " 月
米 ! 线源位于 !#$ 平面上的 "#%& 的直线上 "并且是关于" 轴对称的 ! !#$ 平面与抛物面的截线方程为 ##’#"$" !
全国大学生数学建模竞赛试题集
2002年A题……车灯线光源的优化设计安装在汽车头部的车灯的形状为一旋转抛物面,车灯的对称轴水平地指向正前方, 其开口半径36毫米,深度21.6毫米。
经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置一定长度的均匀分布的线光源。
要求在某一设计规范标准下确定线光源的长度。
该设计规范在简化后可描述如下。
在焦点F正前方25米处的A点放置一测试屏,屏与FA垂直,用以测试车灯的反射光。
在屏上过A点引出一条与地面相平行的直线,在该直线A点的同侧取B点和C点,使AC=2AB=2.6米。
要求C点的光强度不小于某一额定值(可取为1个单位),B点的光强度不小于该额定值的两倍(只须考虑一次反射)。
请解决下列问题:(1)在满足该设计规范的条件下,计算线光源长度,使线光源的功率最小。
(2)对得到的线光源长度,在有标尺的坐标系中画出测试屏上反射光的亮区。
(3)讨论该设计规范的合理性。
2002年B题……彩票中的数学近年来“彩票飓风”席卷中华大地,巨额诱惑使越来越多的人加入到“彩民”的行列,目前流行的彩票主要有“传统型”和“乐透型”两种类型。
“传统型”采用“10选6+1”方案:先从6组0~9号球中摇出6个基本号码,每组摇出一个,然后从0~4号球中摇出一个特别号码,构成中奖号码。
投注者从0~9十个号码中任选6个基本号码(可重复),从0~4中选一个特别号码,构成一注,根据单注号码与中奖号码相符的个数多少及顺序确定中奖等级。
以中奖号码“abcdef+g”为例说明中奖等级,如表一(X表示未选中的号码)。
表一10选6+1(6+1/10)中奖等级 基本号码………………特别号码 说明一等奖 Abcdef…………………g 选7中(6+1)二等奖 abcdef 选7中(6)三等奖 abcdeX……Xbcdef 选7中(5)四等奖 abcdXX……XbcdeX……XXcdef 选7中(4)五等奖 abcXXX……XbcdXX……XXcdeX……XXXdef 选7中(3)六等奖 abXXXX……XbcXXX……XXcdXX……XXXdeXXXXXef选7中(2)“乐透型”有多种不同的形式,比如“33选7”的方案:先从01~33个号码球中一个一个地摇出7个基本号,再从剩余的26个号码球中摇出一个特别号码。
2002年-车灯线光源的优化设计2
摘要本文是关于汽车照明灯线光源长度的优化设计问题,即在给定反射镜面为旋转抛物面和给定设计规范的条件下,确定线光源的长度,使其功率最小(见图1)。
本文从光的反射定律和能量分布规律两种视角解决该问题,建立了两个数学模型。
模型一:利用能量、功率与光照强度之间的关系,利用能量积分法建立了反射屏上任意一点光照强度与线光源上光源点之间、光源点与反射镜面上的反射点之间关系的数学模型,计算出了满足光照强度要求和功率最小要求的线光源的最大长度。
并利用计算机程序对以上结果进行了校核。
模型二:根据光线反射定律,建立了测试屏上反射光线的位置、入射光线的光源点及其反射点之间对应关系的数学模型。
在此模型的基础上讨论了反射镜面不同区域的反射规律,计算出了在满足光照强度要求下的线光源长度。
由于模型二中没有考虑功率最小的要求(因为功率与线光源长度成反比,当线光源长度最短时,其功率最大),同时C点的光照强度在模型二中很小,所以满足题目要求的最终线光源的长度为mm。
.4l18max根据所建立的两个数学模型,对满足设计要求的线光源长度在测试屏上所形成的反射光亮区进行了模拟,在有标尺的坐标系中得到了能够反映反射光变化规律的亮区模拟图(见图2)。
最后,对设计规范的合理性进行了充分和必要的论证。
图1 投影示意图(单位:毫米)图2 测试屏上所形成的反射光亮区(单位:毫米)(注:黑度反映光照强度的大小,黑度越深,光照越强)1 问题的提出:在汽车的照明装置中,前照灯是核心装置,它的反射镜是主要的光学器件。
经过真空镀铝的反射镜镜面通常制成旋转抛物面形,将灯丝发出的散射光聚合,以集中光束的形状射向汽车前进方向的路面。
灯泡灯丝是照明效果的关键,通常制成螺旋形。
灯丝的长度直接决定着光源功率的大小和照明的效果。
因此,在反射镜尺寸和设计规范一定(见A 题)的情况下,选择一定长度的灯丝就显得尤为重要。
本论文试图从最优化的角度,建立起满足设计要求的线光源光强的数学模型,借助于计算机的高速运算与逻辑判断能力,求出使功率最小的线光源的长度,并画出测试屏上反射光的亮区。
车灯线光源的优化设计
车灯线光源的优化设计1问题重述安装在汽车头部的车灯,形状为一旋转抛物面,车灯的对称轴水平地指向正前方,经过车灯的焦点,在与对称轴垂直的水平方向,对称地放置一定长度的均匀分布的线光源。
要求在某一设计规范标准下确定线光源的长度。
该设计规范在简化后可描述如下:在焦点 F 正前方 25 米处的A 点放置一测试屏,屏与FA 垂直,用以测试车灯的反射光。
在屏上过 A 点引出一条与地面相平行的直线,在该直线 A 点的同侧取点B 和点 C,使 AC=2AB=2.6 米。
要求 C 点的光强度不小于某一额定值(可取为 1 个单位),B 点的光强度不小于该额定值的两倍。
请解决下列问题:1)求在该设计规范标准下计算线光源长度,使线光源的功率最小;2)得到的线光源长度,在有标尺的坐标系中画出测试屏上反射光的亮区;3)讨论该设计规范的合理性。
2模型假设1)将线光源看作是只有长度而没有“直径”的发光体,从而可将其理解成一组点光源的集合。
2)均匀分布的线光源的发光强度在每一点恒定,线光源的功率与其长度成正比。
3)光线射到测试屏上的途径只考虑直射和一次反射两种。
4)光在传播过程中与介质的相互作用未改变光的物理特性。
3问题分析这是一个关于车灯线光源的优化设计问题。
根据题意,线光源通过直射和反射(一次反射)至测试屏,由于光的物理特性和车灯结构使得屏上的光照强度因位置的不同而不同。
根据实际需要,车灯前方较亮的区域只需集中于某一适当范围内。
问题要求车灯设计既能满足实际需要,又不会浪费能源(功率最小)。
我们采用光照强度的概念,根据物理学知识可知:被照射物体的亮度依赖于它与光源之间的距离和光线的投射角度。
光线强度 I 只与光源的亮度 P 和光源与被照射点的距离r 有关,即I P 2 ,但车灯的r照明效果是通过照在物体上的实际效果来衡量,这个代表实际效果的量即光照强度 C,光照强度 C 还与光线的投射角度有关,如图所示,P 为光源的光亮度, r 为光源到被照射点x 的距离,θ为光线的投射角度 ,则光照强度C( x)P sin r 2.图 1. 光照强度求解示意4模型的建立与求解4.1 建模初探:光亮度可以通过照射到的光线的疏密来简单表示。
车灯线光源的优化设计
车灯线光源的优化设计刘枫,彭彩英,黄春华[摘要]:本文从几何角度分析了车灯线光源反射光线的线路,并通过证明,分别得出了经反射后可到达 B 、C 点的线光源的长度t 和反射点纵坐标y 的关系,进而量化出B 、C 点的光照度C B E E 、.根据光源的功率与光源强度、线光源的长度之间的关系,建立了线光源长度的数学模型,并利用数值计算方法,得出在满足设计规范,线光源功率最小时的线光源长度l =3.33mm.依据反射线的参数方程,利用Maple 软件描绘出了反射光在测试屏上近似于椭圆的亮区(见图5).并结合实际,从安全性、节能性等方面对本题设计规范的合理性作了分析.关键词:旋转抛物面;线光源;光强度;光源的功率1 问题的提出安装在汽车头部的车灯的形状为一旋转抛物面,该抛物面的对称轴水平指向正前方,开口半径36毫米,深度21.6毫米.现在与对称轴垂直的水平方向,对称放置一定长度的均匀分布的线光源.现要设计一车灯,设计规范为:在焦点F 正前方25米处的A 点放置一与地面垂直的测试屏,即与FA 垂直.在屏上过A 引出一条与地面平行的直线,在A 的同侧取B 和C 两点,使得AC=2AB=2.6米;并且C 点的光强度不小于某一额定值,B 点的光强度不小于该额定值的两倍.要解决的问题:(1)在设计规范标准下确定线光源的长度,使线光源的功率最小. (2)对(1)中求的的线光源的长度,画出测试屏上反射光的亮区. (3)讨论上述设计规范的合理性.2 问题的分析车灯的形状为一旋转抛物面,我们可以假设其表面的物质都是均匀的。
线光源过焦点垂直于对称轴与水平面平行。
线光源与A 点构成一个水平平面,记xoy ,B 、C 两点在该平面上。
根据光线反射原理可以知道,能够射到直线BC 上的点光源必存在于xoy 。
我们对本题的讨论就可集中在xoy 面上进行。
对于xoy 面上反射的光线,应分若干区域进行讨论。
抓住“C 点光强度不小于某一额定值,B 点光强度不小于该额定值的两倍”这一点,建立线光源长度与抛物面上放射点的关系。
车灯线光源优化设计方案.pptx
车灯线光源的优化设计方案
步骤三 首先在 R (0,30mm)内以0.1mm步长对 R 进行搜
索,得到 W-R 的图像如下图
第29页/共40页
车灯线光源的优化设计方案
对上页图中划在圆圈内部的 W-R 曲线进行放大,得到下图
从图中可以看 出,最优的 R 出现在 1.5mm到 3mm区域内。 所以,将进一 步搜索的区域 定义为
1
z2 1x1
z2 1 y1
dx1dy1
从方程组(*)中可以确定
x1 x1 x0 , y0
y1
y1
x0 ,
y0
第14页/共40页
车灯线光源的优化设计方案
则 x1,y1 对于 x0,y0 的 Jacobi 行列式为
x1 y1 J x0 x0
x1 y1 y0 y0
则可得到
dx1dy1 J dx0y0
第19页/共40页
车灯线光源的优化设计方案
5.4 非线性规划问题
根据题意,本问题的约束条件为 I B 2 I C 1
而我们的目标是使线光源半轴发光的总强度量最小,即
minW R
第20页/共40页
车灯线光源的优化设计方案
最终,本问题归结为一个求非线性规划最优解的问题
minW R
I B
车灯线光源的优化设计方案 二、基本假设
1. 不考虑光在空气中传播时的损耗。 2. 点光源发光时,在各个方向上产生的光
强度是一样的。
第2页/共40页
车灯线光源的优化设计方案
三、参数说明
P:旋转抛物面的焦参数 2R:线光源长度 W:线光源半轴长发光的总强度 λ:线光源光能线密度,可以表示单位长度光源产生的光强度量 I(B):B点接收到的光强度(光强度量的面密度) I(C):C点接收到的光强度(光强度量的面密度) I(h):光仔空间传播时在距离光源h除的光强度 d:旋转抛物面的深度 Q:某点光源的发光强度量 n:每个发光点向空间发射的光线数
数学建模车灯线光源优化设计方案
课程设计论文学院: 理学院专业: 数学与应用数学课程名称数学建模课程设计题目车灯线光源的优化设计队号007学生姓名老衲学号01学生姓名师太学号02学生姓名学号指导教师2012年6月摘要车灯线光源的优化设计摘要汽车前照灯作为一个完整的光学照明体系,对汽车的行驶安全性有着极其重要的影响。
本文主要以车灯线光源的优化设计为研究对象,根据物理学中的光的反射定律,能量守恒定律,运用了空间解析几何,微积分等方法建立了优化模型。
在研究的过程中,以线光源上任一点为研究对象,在通过积分的手段来研究整条线光源,从而求得使线光源功率最小的线光源长度为 4.68mm。
并通过点光源在抛物面上任一点处反射光线的计算机模拟,给出了线光源反射线在测试屏上形成的亮区。
关键词:线光源,光强度,旋转抛物面目录摘要 (I)1 引言—问题重述与分析 (1)2 模型假设 (1)3 问题分析与建模求解 (1)3.1 求线光源的长度 (1)3.1.1 (1)3.1.2 (1)3.1.3 (2)3.1.4 (2)3.1.5 (2)3.1.6 (2)3.2 求反射光的亮区 (3)4 模型分析 (5)附录: (7)参考文献 (8)1 引言—问题重述与分析汽车头部的车灯形状为一旋转抛物面,且已经告知开口半径36mm ,深度21.6mm ,所以可以得出抛物面的焦距,经过适当建立直角坐标系,可以得到抛物面的方程。
在焦点F 正前方25米处的A 点放置一测试屏,屏与FA 垂直,用以测试车灯的反射光。
在屏上过A 点引出一条与地面相平行的直线,在该直线A 点的同侧取B 点和C 点,使AC=2AB=2.6米。
要求C 点的光强度不小于某一额定值(可取为1个单位),B 点的光强度不小于该额定值的两倍(只须考虑一次反射)。
在设计规范的条件下,计算线光源长度,使线光源的功率最小。
且在此基础上,精确画出测试屏上反射光的亮区。
最后提出对规范合理性的意见。
2 模型假设1 只考虑一次反射光情形。
2002数学建模A题-车灯线光源的优化设计-参考答案
A题车灯线光源的优化设计参考答案
A题车灯线光源的优化设计
安装在汽车头部的车灯的形状为一旋转抛物面,车灯的对称轴水平地指向正前方, 其开口半径36毫米,深度21.6毫米。
经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置一定长度的均匀分布的线光源。
要求在某一设计规范标准下确定线光源的长度。
该设计规范在简化后可描述如下。
在焦点F正前方25米处的A点放置一测试屏,屏与FA垂直,用以测试车灯的反射光。
在屏上过A点引出一条与地面相平行的直线,在该直线A点的同侧取B点和C点,使AC=2AB=2.6米。
要求C点的光强度不小于某一额定值(可取为1个单位),B点的光强度不小于该额定值的两倍(只须考虑一次反射)。
请解决下列问题:
(1)在满足该设计规范的条件下,计算线光源长度,使线光源的功率最小。
(2)对得到的线光源长度,在有标尺的坐标系中画出测试屏上反射光的亮区。
(3)讨论该设计规范的合理性。
注意:以下答案是命题人给出的,仅供参考。
各评阅组应根据对题目的理解及学生的解答,自主地进行评阅。
车灯线光源的化设计模型
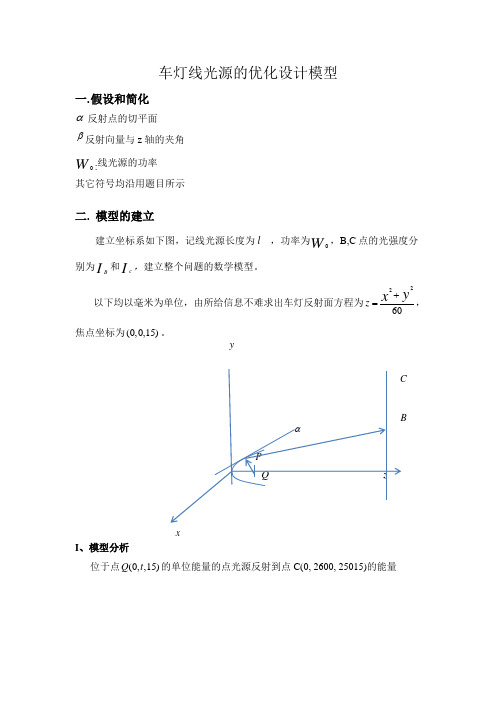
车灯线光源的优化设计模型一.假设和简化α反射点的切平面β反射向量与z轴的夹角W:线光源的功率其它符号均沿用题目所示二. 模型的建立建立坐标系如下图,记线光源长度为l,功率为W,B,C点的光强度分别为BI和c I,建立整个问题的数学模型。
以下均以毫米为单位,由所给信息不难求出车灯反射面方程为2260zyx+=,焦点坐标为(0,0,15)xI、模型分析位于点(0,,15)Q t的单位能量的点光源反射到点C(0, 2600, 25015)的能量设反射点的坐标为22(,,)60x y P x y +。
记入射向量为a,该点反射面外法线方向为b ,可以得到反射向量2,2600,2501560c x y r ⎛⎫=--- ⎪ ⎪⎝⎭满足与向量22a b a b b ⋅-共线.记222yx r =+,由2(,,15),60(,,1)3030a x y t x yb r =--=- 从而得22a b a b b⋅-的表达式22224222(1)900(2900)(2)90018003600810000(3)60(900)x yzxytt ty c ry r crr r c r =+--=++--=+ 由反射向量c 满足与向量22a ba b b⋅-共线,应有 2(4)2600(5)25015(6)60x y z kc xkc y kc r =-=-=- 其中k 为常数。
从上述(1)、(4)式可解得0=x 或29002r k ty +=-.由(2)(3)得反射点坐标满足以下两组方程:54320(7)(2600)1800(14982004680000)(9360000810000)135081000021060000000.375013(2600)(8)x y t y y t y t y t t y t x =⎧⎪-+++-++⎨⎪--=⎩⎧=⎪-⎨⎪=⎩计算上面式子可知,存在0 1.56C t ≈-,当0C t t >时方程组(7)不存在满足2236r ≤的实根,即无反射点。
民院车灯线光源的优化设
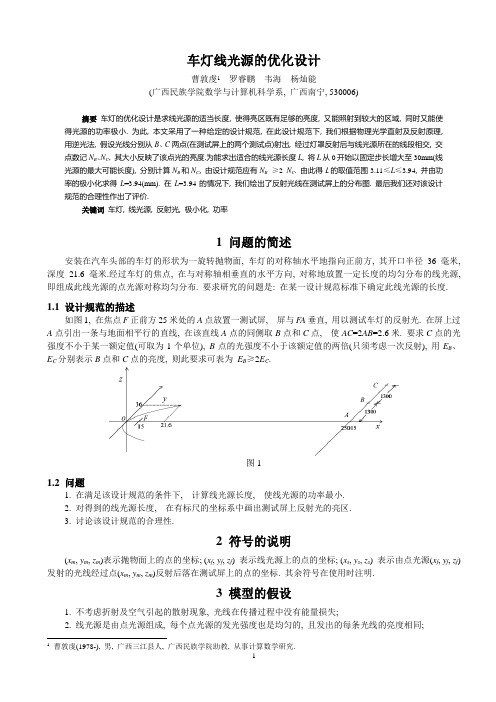
车灯线光源的优化设计曹敦虔1罗睿鹏韦海杨灿能(广西民族学院数学与计算机科学系, 广西南宁, 530006)摘要车灯的优化设计是求线光源的适当长度, 使得亮区既有足够的亮度, 又能照射到较大的区域, 同时又能使得光源的功率极小. 为此, 本文采用了一种给定的设计规范, 在此设计规范下, 我们根据物理光学直射及反射原理, 用逆光法, 假设光线分别从B、C两点(在测试屏上的两个测试点)射出, 经过灯罩反射后与线光源所在的线段相交, 交点数记N B、N C, 其大小反映了该点光的亮度.为能求出适合的线光源长度L, 将L从0开始以固定步长增大至30mm(线光源的最大可能长度), 分别计算N B和N C, 由设计规范应有N B≥2 N C. 由此得L的取值范围3.11≤L≤3.94, 并由功率的极小化求得L=3.94(mm). 在L=3.94的情况下, 我们绘出了反射光线在测试屏上的分布图. 最后我们还对该设计规范的合理性作出了评价.关键词车灯, 线光源, 反射光, 极小化, 功率1 问题的简述安装在汽车头部的车灯的形状为一旋转抛物面, 车灯的对称轴水平地指向正前方, 其开口半径36毫米, 深度21.6毫米.经过车灯的焦点, 在与对称轴相垂直的水平方向, 对称地放置一定长度的均匀分布的线光源, 即组成此线光源的点光源对称均匀分布. 要求研究的问题是: 在某一设计规范标准下确定此线光源的长度.1.1 设计规范的描述如图1, 在焦点F正前方25米处的A点放置一测试屏, 屏与F A垂直, 用以测试车灯的反射光. 在屏上过A点引出一条与地面相平行的直线, 在该直线A点的同侧取B点和C点, 使AC=2AB=2.6米. 要求C点的光强度不小于某一额定值(可取为1个单位), B点的光强度不小于该额定值的两倍(只须考虑一次反射), 用E B、E C分别表示B点和C点的亮度, 则此要求可表为E B≥2E C.图11.2 问题1. 在满足该设计规范的条件下, 计算线光源长度, 使线光源的功率最小.2. 对得到的线光源长度, 在有标尺的坐标系中画出测试屏上反射光的亮区.3. 讨论该设计规范的合理性.2 符号的说明(x m, y m, z m)表示抛物面上的点的坐标; (x f, y f, z f) 表示线光源上的点的坐标; (x s, y s, z s) 表示由点光源(x f, y f, z f)发射的光线经过点(x m, y m, z m)反射后落在测试屏上的点的坐标. 其余符号在使用时注明.3 模型的假设1. 不考虑折射及空气引起的散射现象, 光线在传播过程中没有能量损失;2. 线光源是由点光源组成, 每个点光源的发光强度也是均匀的, 且发出的每条光线的亮度相同;1曹敦虔(1978-), 男, 广西三江县人, 广西民族学院助教, 从事计算数学研究.3. 只考虑光在抛物面的一次反射;4. 所有的长度单位取毫米(mm).4 问题的分析如图1所示, 以旋转抛物面的顶点为原点, 旋转抛物面的开口方向为x 正向, 水平方向为y 方向, 竖直向上为z 正向, 建立右手坐标系. 容易求得旋转抛物面的方程为x z y 2303022=+ 线光源所在的直线方程为⎩⎨⎧==015z x 过抛物面上任一点(x m , y m , z m )的切平面方程为30(x -x m )-y m (y -y m )- z m (z -z m )=0相应的法线方程为mmm m m z z z y y y x x -=-=--30 记平面z =0为π, 则π与已知抛物面的相交曲线为一条抛物线, 其方程为y 2=60x由线光源上的点(x f , y f , 0)入射到抛物线上的点(x m ,y m ,0)的入射光线所在的方程为⎪⎩⎪⎨⎧=--=--0z y y y y x x x x f m f f m f对应的反射光线方程为⎪⎩⎪⎨⎧=--=--''''0z y y y y x x x x f m f f m f 其中9009006060180090090060260222222+--++=++--+=''m fm f m m m fm f m ff m m f m m m f y y y x y x y y y y y x y y y x y x y x由上可知, 一旦确定了线光源上的发光点、抛物面上的反光点, 就可以确定反射光线的方程.根据光线的反射定律, 入射光线、法线和反射光线是在同一平面内的, 所以反射光线射到直线AC 上的对应的入射光线也一定在平面π内, 所以对问题一我们只需考虑平面π内的光线, 这样就把三维问题转化为二维问题来解决.为了得到B 、C 两点的亮度的关系, 我们应用光路可逆原理, 假设光线是从B 、C 两点发出, 经抛物面反射后与线光源所在的线段相交, 称交点为对应的光点, 对给定的线光源长度, 如果交点数越多, 则说明线光源发出的光经反射后到达该点的光线越多, 也就越亮. 于是就可以通过统计“交点”数而得到B 、C 两点的亮度的关系.从测试屏上的点(x s , y s )发出的光线射到抛物线上的(x m , y m )处, 入射光线所在的方程为)(m ms ms m x x x x y y y y ---=-经过点(x m ,y m )的反射得到反射线的方程为)(m ms ms m x x x x y y y y --'-'=-其中⎪⎪⎩⎪⎪⎨⎧+-+-+='++-+-='900900180060609009006060222222m sm m s m m s m fm ss m m m s m m s y y y y x x y y y y y x y y y y x x y x 反射光线与线光源所在的直线的交点坐标为))(,(m m f x x y y f y x x x ms m s +--'-', 分别将B 点坐标(25015,1300)和C 点坐标(25015, 2600)以及焦距x f =15和2601m m y x =代入, 就得到由B 、C 两点发出的光线经反射后与线光源所在的直线相交的交点坐标, 分别为(15, y fb ), (15, y fc ), 其中1350810000468000014982001053000000810000234000018001300242345+---+-+-=m m m m m m m m fb y y y y y y y y y (1)1350810000936000014982002106000000810000468000018002600242345+---+-+-=m m m m m m m m fc y y y y y y y y y (2)并且-36≤y m ≤36.5 模型的建立及解决5.1 模型的建立模型的目标是在满足设计规范条件下使得C 点的亮度达到额定值时线光源的功率W 极小, 可描述如下:⎩⎨⎧≥cB E E W2s.t.minW 是光源的功率, E B 和E C 分别是B 点和C 点的亮度.为了方便表征B 点和C 点的亮度, 我们引入密集度的概念:密集度=光点数/线光源的长度 记为ρ, 可用B ρ和C ρ分别表征B 和C 点的光亮度.由于点光源越接近焦点, 它发出的光线越集中在对称轴附近, 而C 点距离对称轴较远, L 太小, C 的亮度不够, 要使C 点的亮度达到额定值, 并且线光源发光的功率W 要求极小, 就必须使得L 较长. 于是模型可以具体表示为⎩⎨⎧≥cB Lρρ2s.t.min其中B ρ=N B /L , C ρ=N C /L , N B 、N C 分别是光线从B 点、C 点射出经抛物面反射后与线光源相交的点数, 即B 点、C 点的光点总数.5.2 模型的求解求解模型的思想是让L 以某个步长d L 从0增大至60(最大允许值), 对每一个L , 让y m 以步长d y 从-36增大至36, 利用公式(1)和(2)就可以算出N B 、N C , 如果满足B ρ≥C ρ2, 记录下区间的长度L , 该长度即为可行解.所以最优解为L =3.94.5.3反射光亮区图的绘制线光源长度一旦确定后, 反射光源亮区的形状就确定了. 为了能够绘出亮区图, 我们首先求出线光源上的点(x f , y f , z f )发出的光线经点(x m , y m , z m )反射后到达测试屏上的点的坐标. 经计算, 入射光线为mf mm f m m f m z z z z y y y y x x x x --=--=--对应的反射光所在的直线方程为mf mm f m m f m z z z z y y y y x x x x --=--=--'''其中fmm m f m f m f mf fmmm f m f m f m f fmm mm m m f m f m f m m f z z y x z z y y x z z y z y x z z y y x y y x z y z y y x z z y y x z x x -++-----=-++-----=-+++++--+='''22222222229009003030290090030302900303030309002于是反射光线与测试屏的交点坐标(x s , y s , z s )为2222222222323222222222222232322260606060900)906022513500602249552495514991002251350022501524955499701500000(60606060900)906022513500602249552495514991002251350022501524955499701500000(25000mf m f m m m f m f f m m m m m f m m m m f m m m m f m m f m m m m f m m m m m f m m m f f m m f m f m m m f m f s m f m f m m m f m f f m m m m m f m m m m m f m m m f m m f m m m m f m m m m m f m f m m m f m f m f m m f m m f s s y x z x y z y y z z x y x z x x z x z x z z y x z y x z x x z y x z x z y z z x z z y x y z y z z z z x z y y z x z z x y x z y z z y y x z x y x x y x x y y z y x z y x y x x z y x y x z y y y x y z z y x z y y y y y x z z y y x y x ++--++----+--+--+++-+++-+-=++--++----+--+--+++-+++-+-==取个小步长遍历(x f, y f, z f)及(x m, y m, z m)的可能值, 借助以上的表达式, 计算出落在测试屏上的点的坐标序列, 应用MatLab的绘图系统描出测试屏上反射光的亮区, 如图3. 图中点的疏密代表了亮度的强弱.图3 反射光的亮区6 设计规范的评价由反射光线分布图可以看出, 在距离车灯25米处的亮区大约是宽为6.6m、高为1.7m的区域, 并且光线分布比较均匀. 直接射出的光线可照射到较大的范围, 这样既使得司机能够看清目标, 同时也能让对方看见自己. 综合各方面的因素, 这样的设计规范是合理的.7 模型的评价对于所用的模型, 它的求解过程比较简单, 省略了所有无须考虑的光线, 考虑的范围大大减少, 通过建立光强度与密集度的关系能快速求解出在满足条件时, 所有可能的区间值. 用该模型计算时我们注意到可算出取不同长度的灯丝得到的B点与C点的光强度之比E B/E C, 我们称之为光强的变化率, 它表征被照区域之内光亮的变化情况. 变化率越大, B的领域与C的领域明暗相差程度就越大这对于行车中的司机来说是十分不利的, 则我们得到的结果使得E B/E C=2, 这是比较优的.参考文献[1] 刘玉琏, 傅沛仁. 数学分析讲义. 高等教育出版社, 167-169页, 1992.[2] 樊静, 王伟. 物理学词典—光学分册. 科学出版社出版, 1988.[3] 蒙世奎. 空间解析几何新编. 广西教育出版社, 1989.Optimal Design on Linear Light-source of AutomobileCao Dunqian Luo Ruipeng Wei Hai Yang Canneng(Department of Mathematics and Computer Sciences, Guangxi University for Nationalities, Nanning, 530006, China)Abstract: In this paper, we shall solve the following problem, how to choose a suitable length of linear light source, such that light-source has adequate brightness, and the beam can shine on a bigger area as well as. What's more important, its power gains minimum. By a kind of design standard, and applying backlighting in physical optics principle, We obtain that when L belongs to interval [3.11, 3.94](unit: mm), the design meets our requirement.Keyword: Light of automobile, Linear light-source, reflecting light, minimization, power。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车灯线光源的优化设计摘要题目要求我们针对确定的设计规范,计算线光源的长度,然后再根据线光源的长度讨论该设计规范是否合理。
针对题目的任务,我们采用物理光学的知识和数学极限思想建立模型,根据题目的要求对线光源反射在屏幕上的光照强度进行了研究,并按照要求完成了线光源的优化设计。
对于问题一,采用了对线光源无限分割成线元的点光源的极限思想,并求出每个点光源经抛物面反射后照在测试屏幕上的光照强度,在B ,C 两点利用区域法将圆区域的光照强度的和代替点的光照强度,再根据B ,C 光照强度的关系,最后求得:l =4mm对于问题二,在问题一的基础上可以利用matlab 将带坐标的亮区绘出来,(结果见图5,第7页)对于问题三,夜晚行车司机在看清障碍物时,从反应到到制动停止的距离为h ,其取值范围是:23.6926.69m h m ≤≤取26.69h m =>25m ,所以我们希望设计规范能够将25m 提高到30m 以外,提高司机的人身安全,同时考虑强度问题,为了确保在在30m 外能够辨出障碍物,屏幕上相应的B 和C 点的距离也要相应提高,并且线光源的长度也要适当增长,以确保有足够的强度。
(具体长度呢?)关键词:数学无限分割极限思想 光照度平方反比定理 光照强度一、问题的重述1.1问题背景安装在汽车头部的车灯的形状为一旋转抛物面,车灯的对称轴水平地指向正前方, 其开口半径36mm,深度21.6mm。
经过车灯的焦点,在与对称轴相垂直的水平方向,对称地放置一定长度的均匀分布的线光源。
要求在某一设计规范标准下确定线光源的长度。
1.2目标任务该设计规范在简化后可描述如下。
在焦点F正前方25m处的A点放置一测试屏,屏与FA垂直,用以测试车灯的反射光。
在屏上过A点引出一条与地面相平行的直线,在该直线A点的同侧取B点和C点,使AC=2AB=2.6m。
要求C点的光强度不小于某一额定值(可取为1个单位),B点的光强度不小于该额定值的两倍(只须考虑一次反射)。
解决如下问题:(1)在满足该设计规范的条件下,计算线光源长度,使线光源的功率最小。
(2)对得到的线光源长度,在有标尺的坐标系中画出测试屏上反射光的亮区。
(3)讨论该设计规范的合理性。
二、问题分析该问题属于物理学中的光学问题,对于线光源发射出来的光为无数条,我们无法运用整体思想进行建立模型。
对于问题一,我们运用无限分割成微元的极限思想,将线光源分成无限n (n=1,2,3…)份线元,然后计算出每份线元经过车灯抛物面反射后射在测光屏上的光照强度E,进而可以对光照强度在,B C两点的极小区域进行求和,最后n要使线光源的发光功率最小,尽量满足B点处的光照强度接近C点处的两倍,由光照强度,功率与线光源之间个光线可以求出线光源的最小长度。
对于问题二,在问题一的基础上,在计算线元的光照强度时模拟光线的反射可得到反射光的亮区图。
对于问题三,结合实际与计算结果,以夜间行车的安全性讨论设计规范的合理性。
最后由模型和结果对该规范的合理性进行讨论修改。
三、基本假设1.假设光线在经过抛物面反射所造成能量损失忽略不计,只考虑光线随距离的变化而产生的能量损失。
2.假设抛物面光滑,无凹凸不平,对光线无额外的作用,除了正常的反射。
3.由于要测试的,B C两点离屏幕A点距离远远大于旋转抛物面的最大口径故忽略线光源对测光屏幕直射的光照强度,只考虑反射对测光屏幕光照强度的影响。
4.假设车灯发光均匀,光强均匀。
5.假设每份光线元经抛物面反射后,光强度为1个单位。
四、符号说明五.模型的建立与求解5.1问题一对于问题一,要求在满足该设计规范的条件下,计算线光源的长度,使线光源的功率最小。
5.1.2模型的建立首先以抛物面顶点为原心o,以抛物面的旋转中心轴为y轴,竖直向上为z 轴,建立空间直角坐标系,如图1:图1 建立的坐标图由题目所给的数据,抛物面开口半径为36mm ,深度为21.6mm ,我们根据抛物线旋转的知识求得抛物面方程:2260x z y += (1)设定线光源上任意一点p 坐标为(,15,0a ),a 的值取决于点的位置。
同时已知了FA =25m ,2 2.6AC AB ==m 。
则可以写出(1300,25015B ,(2600,25015,0)C 。
当线光源上点光源P 发出的光经抛物面上(,,)D D D D x y z 反射后,照射到测屏试幕上的s 点,由空间几何知识,旋转抛物面在D 处的切平面的法向量为(,30,)D D n x z =- 。
如图2:图2 点光源发出光线反射在屏幕上图图3 入射光线与反射光线向量图根据物理学中光的反射定律可知,光的入射角等于反射角,且入射光线和反射光线同在反射平面一侧且分居法线两边。
则向量PD 与向量n 的夹角和n 与SD 的夹角相等,可知: 22()PD n SD n PD n=+ (2)由(2)式可求得发射光线的SD 的方向向量为SD =(,,)i j k ,则反射光线的方程为:D D D x x y y z z i j k---== (3) 同时测试屏幕平面的方程为:25015y = (4)则运用matlab 软件编程可求出反射光线与测试屏幕的交点(,,)S S S S x y z 。
算出S 点的坐标,可以求得光线从点光源射出到照射到测试屏幕所经过的路程: 1212,,PD R SD R R R R ===+ (5)由光照度平方反比定理得光照度与点光源的发光强度I 成正比,与点光源到面的距离r 的平方成反比,并与面的法线与入射光线夹角余弦成正弦: 2cos I E r β= (6) 由于在车灯抛物面中的法线与入射角的夹角较小,近似为0,且我们已假设点光源P 射出的光线元的光强度为I =1,经过反射后达到S 点的照度为: 21(1,2,3...)n E n R== (7) 因为线光源的材质是均匀的,且单位长度发出的功率为一定值,故我们知道 必定存在:p kl = (8)其中k 与材质有关,为一常数。
要使功率最小,长度必须最小,但是必须符合反射光照到屏幕C 点和B 点光照强度近似两倍的关系:2C B E E = (9)5.1.3模型的求解 (建议求解的过程按算法步骤形式写,更具有可读性。
)实际中,我们很难测出一条光线正好就照到屏幕的某个点的光照强度,因此我们采取小区域加和在此区域所有光线的光照强度的方法,B C 两点进行处理,首先分别以,B C 两点为圆心取一个半径极小的圆,半径为30mm ,相对于1.3m 。
圆也足够小,满足计算精度,然后将射在圆上的线元的光照度进行叠加,根据B 点的光照度近似是C 点的两倍,运用matlab 软件对整个模型过程进行编程求解:l =4mm这时,B C 两点的光照强度之比为1.96,近似为2。
5.2问题二对于问题二,要求在第一问求得线光源强度的情况下,在有标尺的坐标系中画出测试屏上反射光的亮区。
5.2.1问题二的求解在无限n 线元的叠加中,在测光屏幕的上显示的亮区是由无数个点构成的点集,在模型求解的过程取的n 越大,点集就越密且呈对称状。
n 可以取无限大,但是在实际运算操作中我们不可能无限的取值。
n 值取得越大,算出的结果精度也会较高,误差也会较小。
由matlab 软件绘制出的测试屏幕上反射光亮区图:图4 对称一侧的亮区图图5 整个屏幕上的亮区图图4与图5,取的n 不同,所以密度也不一样。
通过比较可知,n 值取得越大,算出的结果精度也会较高,误差也会较小。
5.3问题三对于问题三,是关于该设计规范的合理性问题,讨论该设计规范的是否合理。
5.3.1合理性问题的讨论在实际情况下,夜间汽车行车车速一般在40/km h -60/km h 之间,我们就假定为60/km h ,换算后为16.7/m s 。
经过查询资料可以知道人的平均反应时间0.7s ,则由物理运动学公式:11h v t =⨯算出经过反应时间车所走过的路程为1h =11.69m 。
查询资料后我们掌握了市面上一般汽车在行车速度为60/km h 的制动距离:21215m h m ≤≤所以车在反应时间和制动时间内走过的总路程:12h h h =+则23.6926.69m h m ≤≤。
我们按照最坏的情况来考虑,在夜间行车,司机如果在障碍物面前25米开始反应0.7m 后在按最大的制动距离15m 进行汽车制动,此时将会发生危险事故,如果设计规则能够把距离提高到30m 以上,相对较远的距离对司机来说有足够的反应时间可以较大程度地保障司机的人身安全。
所以我们认为如果将设计规范中的距离能再提高到30m 以上会更为合理。
此外,我们也要考虑光照强度问题,市面上一般小轿车车身宽度为1.7m ,则取B 点距离为1.3m ,由于车灯是两边对称,光照强度在车正前方叠加,而车旁C 点相对较弱,这也保证了有足够的亮度能让前方的障碍物反射,让司机察觉,而且中间较亮也能让司机集中精力行车,假如两旁较亮中间较暗将会出现安全事故。
但是随着我们提高设计规范中的距离,B 点和C 点的与A 点距离也要相应提高。
六、模型的评价与改进优点:模型大部分是我们自主建立的。
我们采用了数学的有限元分析与光学知识结合能够很好的解决线光源的优化设计的问题。
在分析线光源发出的光线反射至屏幕时,我们的模型能够较为全面地解决不同点光源发出光线汇聚在同一区域内的光照强度问题。
缺点:由于时间和硬件方面的限制,我们对计算的精度不能再精确,这也会对结果产生一定的误差。
在对n 线元取值时,也存在比较大的主观性。
这也可能降低模型的精度。
改进:在建立模型的过程中,我们可以找出线光源的发光强度I 与光源的发光功率p 之间关系,再找出屏幕上的点的光照强度E 与发光功率p 之间的关系,最后综合线光源长度l 与功率的关系p 建立更加全面完整精确的模型。
七、参考文献[1] 姜启源,数学模型(第三版),北京:高等教育出版社,2003.[2] 陈光亭,裘哲勇,数学建模,北京:高等教育出版社,2010.[3] 陈建州,实用数学建模教程,武汉理工大学出版社,2003.[4]陈敬胜,何集文,叶海康,汽车刹车距离http://view/90406616650,2012年8月1日.[5]卓小巧,多曲面反射器的车灯配光技术研究及可视化,浙江工业大学硕士论文,2003.[6]苏金明,阮沈勇,Matlab6.1实用指南,北京:电子工业出版社,2002.[7]李胡锡,Matlab循序渐进,上海:上海交通大学出版社,1997.[8]王家文,Matlab7.0图像图形处理,北京:国防工业出版社,2006.八、附录附录:求解模型中线光源长度的matlab程序:function a2002clc,clear;alpha=[0*pi/180:6*pi/180:360*pi/180];l=length(alpha);%%%y=[0:0.4:21.6];a=[-2:0.2:2];al=length(a);m=length(y);%%%E1=0;E2=0;p_final=[];P_final=[];for aa=1:alfor ii=1:lr=sqrt(60.*y);x=sin(alpha(ii)).*r;z=cos(alpha(ii)).*r;s1=[x-a(aa);y-15;z];s=[x;-30*ones(1,m);z];for i=1:mss(i)=sqrt(s(1,i)^2+s(2,i)^2+s(3,i)^2);ss1(i)=sqrt(s1(1,i)^2+s1(2,i)^2+s1(3,i)^2);endtheta=acos(sum(s1.*s)./(sqrt((ss).^2).*sqrt((ss1).^2))); for i=1:ms2(:,i)=-2*dot(s(:,i),s1(:,i))/dot(s(:,i),s(:,i))*s(:,i)+s1(:,i);%很重要!!!!!!endpoint(2,:)=25015-y;point_test(2,:)=21.6-y;point(1,:)=(point(2,:)-y)./s2(2,:).*s2(1,:)+x;point(3,:)=(point(2,:)-y)./s2(2,:).*s2(3,:)+z;point_test(1,:)=(point_test(2,:)-y)./s2(2,:).*s2(1,:)+x; point_test(3,:)=(point_test(2,:)-y)./s2(2,:).*s2(3,:)+z; for i=1:m;if sqrt(point_test(1,i)^2+point_test(3,i)^2)>36point(1,i)=0;point(3,i)=0;endendfor i=1:m;if sqrt((point(1,i)-1300)^2+point(3,i)^2)<=30r1=sqrt((x(i)-a(aa))^2+(y(i)-15)^2+z(i)^2);r2=sqrt((x(i)-point(1,i))^2+(y(i)-point(2,i))^2+(z(i)-point(3,i))^2);E1=E1+1./(r1+r2).^2;elseif sqrt((point(1,i)-2600)^2+point(3,i)^2)<=30r1=sqrt((x(i)-a(aa))^2+(y(i)-15)^2+z(i)^2);r2=sqrt((x(i)-point(1,i))^2+(y(i)-point(2,i))^2+(z(i)-point(3,i))^2);E2=E2+1./(r1+r2).^2;endendp_final=[p_final,[point(1,:);point(3,:)]];endP_final=[P_final,p_final];endE1/E2plot(P_final(1,:),P_final(2,:),'.');。