第5章 数组与广义表
第5章数组与广义表

5.2 数组的顺序表示和实现
特点:用一组地址连续的存储单元按照某种规则存放数组 中的数据元素。 两种规则(顺序存储方式):
以行序为主(低下标优先)—将数组元素按行排列,第 i+1个行向量紧接在第i个行向量后。如:PASCAL、C。 以列序为主(高下标优先)—将数组元素按列排列,第 j+1个列向量紧接在第j个列向量后。如:FORTRAN。
am-1,0 a01 a11 …… am-1,1
……
按 列 序 为 主 序
a0,n-1 a1,n-1
……
am-1,n-1 am-1,n-1 ?A[2][3][2]以行序为主存储,写出其元素存放的先后顺序
5.2 数组的顺序表示和实现
计算数组任一元素(a j1 j2 ... jn )的地址需要的三要素: ①数组的起始地址(即基地址) ②数组维数和各维的长度; ③数组中每个元素所占的存储单元 已知二维数组Ab1*b2,每个元素占L个存储单元, LOC(0,0)是 数组第一个元素的起始地址,以行序为主存储,求LOC(i,j)。
N维数组数据元素存储地址计算
1、数组M[1..10][-1..6][[0..3],起始地址是1000,每个元素占3个 存储单元,数组元素个数是 ,M[2][4][2]的地址是 。 2、数组A[0 .. 8][1 .. 10]的成员由6个字节组成,存放a要 个字 节,a的第8行第5列占 个字节。按行序a[8][5]与按列序 起始地址相同。 (10-1+1)*(6-(-1)+1)*(3-0+1)=320 LOC(M[2][4][2])=1000+[(i-1)*b2*b3+(j-(-1))*b3+k]*l =1000+[32*(2-1)+4*(4+1)+2]*3=1162 LOC(a[8][5])=a(起始地址)+(i*n+(j-1))*l =a+(8*10+4)*6=a+504, LOC(a[3][10])=a(起始地址)+((j-1)*m+i)*l =a+(9*9+3)*6=a+504。
数据结构-第五章 数组与广义表-文档资料
上 三 角 矩 阵 下 三 角 矩 阵
a00 a10 a 20 an10
0 1 2
a01 a11 a21 an11
3 4
a02 a12 a22 an12
5
6 7
a0 n1 a1n1 a2 n1 an1n1
行 列 值 (row) (col) (value) 0 4 91 1 1 11 2 5 28 3 0 22 3 2 -6 5 1 17 5 3 39 6 0 16
用三元组表表示的稀疏矩阵及其转置
行 列 值 (row) (col) (value) 0 3 22 0 6 15 1 1 11 1 5 17 2 3 -6 3 5 39 4 0 91 5 2 28 行 列 值 (row) (col) (value) 0 4 91 1 1 11 2 5 28 3 0 22 3 2 -6 5 1 17 5 3 39 6 0 16
4 5 6 7 8 9 10
B a00 a01 a10 a11 a12 a21 a22 a23 … an-1n-2 an-1n-1
三对角矩阵中除主对角线及在主对角线上 下最临 近的两条对角线上的元素外,所有其它元素均为 0。总共有3n-2个非零元素。 将三对角矩阵A中三条对角线上的元素按行存放在 一维数组 B 中,且a00存放于B[0]。 在三条对角线上的元素aij 满足 0 i n-1, i-1 j i+1 在一维数组 B 中 A[i][j] 在第 i 行,它前面有 3*i-1 个非零元素, 在本行中第 j 列前面有 j-i+1 个,所 以元素 A[i][j] 在 B 中位置为 k = 2*i + j。
三对角矩阵的压缩存储
《数据结构——用C语言描述(第二版)》第5章 数组和广义表
第五章 数组和广义表
在压缩存储时,矩阵中值相同的元素C可共享一个存储空间,元素 为零则可不必分配空间,而其余的元素有 n(n+1)/2个,因此三角矩阵 可用一维数组M[n×(n+1)/2+1]来存储,其中常数C放在数组的最后一 个下标变量中。
假设A和B矩阵分别用matrix型指针变量a和b表示,矩阵的转置可以 按以下进行:由于B的行是A的列,所以可按照b->data三元组表的次序在 a->data中找到相应的三元组进行转置,即可按a->data的列序转置,所得 到的转置矩阵B的三元组表b->data必定是按行优先存放的。因此,可以对 三元组表a->data从第一行起扫描,找到A的每一列中所有的非零元素,就 可以实现转置。
LOC ( aij ) =LOC ( a00) +(i×n+j) × c 同理可推导出以列为主序优先存储时数据元素a i j 的存储地址,其计算公式 为:
LOC( a i j ) =LOC( a00 ) +( j × n +i ) × c 对于三维数组Am×n×p而言,若以行为主序优先存储时,则其数据元 素aijk的存储地址可为: LOC ( a i j k) =LOC ( a000) +[ i × m×p +j ×p +k] × c 对于一般的二维数组A[c1…d1,c2…d2]而言,此处c1,c2的值不一定是 0,a i j 的地址为: LOC ( a i j ) =LOC ( a c 1 c 2 ) +[ ( i – c 1 )* ( d 2 – c 2 +1) +j – c 2 ] * c
第五章 数组与广义表

第五章数组、特殊矩阵和广义表本章介绍的数组与广义表可视为线性表的推广,其特点是数据元素仍然是一个表。
本章讨论多维数组的逻辑结构和存储结构、特殊矩阵、矩阵的压缩存储、广义表的逻辑结构和存储结构等。
5.1 多维数组5.1.1 数组的逻辑结构数组是我们很熟悉的一种数据结构,它可以看作线性表的推广。
数组作为一种数据结构其特点是结构中的元素本身可以是具有某种结构的数据,但属于同一数据类型,比如:一维数组可以看作一个线性表,二维数组可以看作“数据元素是一维数组”的一维数组,三维数组可以看作“数据元素是二维数组”的一维数组,依此类推。
图5.1是一个m行n 列的二维数组。
标识,因此,在数组上不能做插入、删除数据元素的操作。
通常在各种高级语言中数组一旦被定义,每一维的大小及上下界都不能改变。
在数组中通常做下面两种操作:(1)取值操作:给定一组下标,读其对应的数据元素。
(2)赋值操作:给定一组下标,存储或修改与其相对应的数据元素。
我们着重研究二维和三维数组,因为它们的应用是广泛的,尤其是二维数组。
5.1.2 数组的内存映象现在来讨论数组在计算机中的存储表示。
通常,数组在内存被映象为向量,即用向量作为数组的一种存储结构,这是因为内存的地址空间是一维的,数组的行列固定后,通过一个映象函数,则可根据数组元素的下标得到它的存储地址。
对于一维数组按下标顺序分配即可。
对多维数组分配时,要把它的元素映象存储在一维存储器中,一般有两种存储方式:一是以行为主序(或先行后列)的顺序存放,如BASIC、PASCAL、COBOL、C等程序设计语言中用的是以行为主的顺序分配,即一行分配完了接着分配下一行。
另一种是以列为主序(先列后行)的顺序存放,如FORTRAN语言中,用的是以列为主序的分配顺序,即一列一列地分配。
以行为主序的分配规律是:最右边的下标先变化,即最右下标从小到大,循环一遍后,右边第二个下标再变,…,从右向左,最后是左下标。
以列为主序分配的规律恰好相反:最左边的下标先变化,即最左下标从小到大,循环一遍后,左边第二个下标再变,…,从左向右,最后是右下标。
数据结构第5章
第5章:数组和广义表 1. 了解数组的定义;填空题:1、假设有二维数组A 6×8,每个元素用相邻的6个字节存储,存储器按字节编址。
已知A 的起始存储位置(基地址)为1000,则数组A 的体积(存储量)为 288 B ;末尾元素A 57的第一个字节地址为 1282 。
2、三元素组表中的每个结点对应于稀疏矩阵的一个非零元素,它包含有三个数据项,分别表示该元素的 行下标 、 列下标 和 元素值 。
2. 理解数组的顺序表示方法会计算数组元素顺序存储的地址;填空题:1、已知A 的起始存储位置(基地址)为1000,若按行存储时,元素A 14的第一个字节地址为 (8+4)×6+1000=1072 ;若按列存储时,元素A 47的第一个字节地址为 (6×7+4)×6+1000)=1276 。
(注:数组是从0行0列还是从1行1列计算起呢?由末单元为A 57可知,是从0行0列开始!) 2、设数组a[1…60, 1…70]的基地址为2048,每个元素占2个存储单元,若以列序为主序顺序存储,则元素a[32,58]的存储地址为 8950 。
答:不考虑0行0列,利用列优先公式: LOC(a ij )=LOC(a c 1,c 2)+[(j-c 2)*(d 1-c 1+1)+i-c 1)]*L 得:LOC(a 32,58)=2048+[(58-1)*(60-1+1)+32-1]]*2=8950选择题:( A )1、假设有60行70列的二维数组a[1…60, 1…70]以列序为主序顺序存储,其基地址为10000,每个元素占2个存储单元,那么第32行第58列的元素a[32,58]的存储地址为 。
(无第0行第0列元素)A .16902B .16904C .14454D .答案A, B, C 均不对 答:此题(57列×60行+31行)×2字节+10000=16902( B )2、设矩阵A 是一个对称矩阵,为了节省存储,将其下三角部分(如下图所示)按行序存放在一维数组B[ 1, n(n-1)/2 ]中,对下三角部分中任一元素a i,j (i ≤j), 在一维数组B 中下标k 的值是:A .i(i-1)/2+j-1B .i(i-1)/2+jC .i(i+1)/2+j-1D .i(i+1)/2+j3、从供选择的答案中,选出应填入下面叙述 ? 内的最确切的解答,把相应编号写在答卷的对应栏内。
第5章 数组和广义表
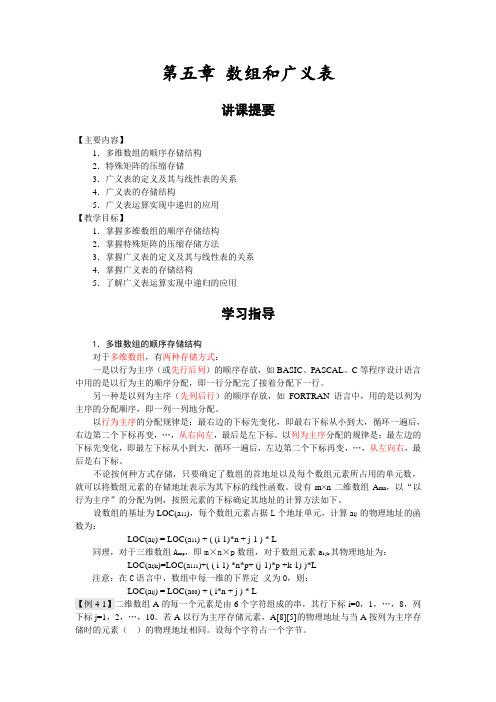
第五章数组和广义表讲课提要【主要内容】1.多维数组的顺序存储结构2.特殊矩阵的压缩存储3.广义表的定义及其与线性表的关系4.广义表的存储结构5.广义表运算实现中递归的应用【教学目标】1.掌握多维数组的顺序存储结构2.掌握特殊矩阵的压缩存储方法3.掌握广义表的定义及其与线性表的关系4.掌握广义表的存储结构5.了解广义表运算实现中递归的应用学习指导1.多维数组的顺序存储结构对于多维数组,有两种存储方式:一是以行为主序(或先行后列)的顺序存放,如BASIC、PASCAL、C等程序设计语言中用的是以行为主的顺序分配,即一行分配完了接着分配下一行。
另一种是以列为主序(先列后行)的顺序存放,如FORTRAN语言中,用的是以列为主序的分配顺序,即一列一列地分配。
以行为主序的分配规律是:最右边的下标先变化,即最右下标从小到大,循环一遍后,右边第二个下标再变,…,从右向左,最后是左下标。
以列为主序分配的规律是:最左边的下标先变化,即最左下标从小到大,循环一遍后,左边第二个下标再变,…,从左向右,最后是右下标。
不论按何种方式存储,只要确定了数组的首地址以及每个数组元素所占用的单元数,就可以将数组元素的存储地址表示为其下标的线性函数。
设有m×n二维数组A mn,以“以行为主序”的分配为例,按照元素的下标确定其地址的计算方法如下。
设数组的基址为LOC(a11),每个数组元素占据L个地址单元,计算a ij 的物理地址的函数为:LOC(a ij) = LOC(a11) + ( (i-1)*n + j-1 ) * L同理,对于三维数组A mnp,即m×n×p数组,对于数组元素a ijk其物理地址为:LOC(a ijk)=LOC(a111)+( ( i-1) *n*p+ (j-1)*p +k-1) )*L注意:在C语言中,数组中每一维的下界定义为0,则:LOC(a ij) = LOC(a00) + ( i*n + j ) * L【例4-1】二维数组A的每一个元素是由6个字符组成的串,其行下标i=0,1,…,8,列下标j=1,2,…,10。
第5章数组和广义表
A.contants[i]=A.bounds[i+1]*A.constants[i+1]; return ok; }
第5章 数组和广义表
Status DestoryArray(Array &A){ //销毁数组 if(!A.base) return ERROR; free(A.base); A.base=NULL; if(!A.bounds) return ERROR; free(A.bounds); A.bounds=NULL; if(!A.contants) return ERROR; free(A.contants) A.contants=NULL; return ok;
(3) Value(A,&e, index1, …, indexn): 若下标合法,则 用e返回数组A中由index1, …, indexn所指定的元素的值。
(4) Assign(&A,e,indexl,…indexn):若各下标不超界, 则将e赋值为所指定的A的元素值,并返回OK。 。
第5章 数组和广义表
三维数组A(1..r , 1..m , 1..n)可以看成是r个m×n的二维数组,
如图5.5所示。
n
m n
r j- 1
m
k- 1
图5.5 三维数组看成r个m×n的二维数组
第5章 数组和广义表
假定每个元素占一个存储单元,采用以行为主序的方法存 放,即行下标r变化最慢, 纵下标n变化最快。 首元素a111的地 址为Loc[1, 1, 1],求任意元素aijk的地址。
第5章 数组和广义表
以上我们以二维数组为例介绍了数组的结构特性,实际 上数组是一组有固定个数的元素的集合。也就是说,一旦定 义了数组的维数和每一维的上下限,数组中元素的个数就固 定了。 例如二维数组A3×4,它有3行、4列,即由12个元素组 成。由于这个性质,使得对数组的操作不像对线性表的操作 那样可以在表中任意一个合法的位置插入或删除一个元素。 对于数组的操作一般只有两类:
数据结构课件PPT数组和广义表

{ q=1; for (col=1;col<=T.mu;++col) for(p=1;p<=M.tu;++p) if ( M.data[p].j==col ) { T.data[q].i=M.data[p].j; T.data[q].j=M.data[p].i; T.data[q].e=M.data[p].e; ++q; } }
(row) (col) (value)
[0] 1 4 22
[0] 1 5 91
[1] 1 7 15
[1] 2 2 11
[2] 2 2 11
[2] 3 6 28
[3] 2 [4] 3来自6 17 4 -6[3] 4 [4] 4
1 22 3 -6
[5] 4 6 39
[5] 6 2 17
[6] 5 1 91
[6] 6 4 39
cpot[1]=1 cpot[col]=cpot[col-1]+num[col-1]
稀疏矩阵的快速转置(算法5.2)
Status FastTransposeSMatrix(TSMatrix M,TSMatrix &T) { T.mu=M.nu; T.nu=M.mu; T.tu=M.tu;
if (T.tu) { for (col=1;col<=M.nu;++col) num[col]=0; for (t=1;t<=M.tu;++t) ++num[M.data[t].j]; cpot[1]=1; for ( col=2;col<=M.nu;++col) cpot[col]=cpot[col-1]+num[col-1]; for (p=1;p<=M.Tu;++p) { col=M.data[p].j; q=cpot[col]; T.data[q].i=M.data[p].j; T.data[q].j=M.data[p].i; T.data[q].e=M.data[p].e; ++cpot[col]; } }
数据结构第5章数组与广义表
一个稀疏矩阵里存在大量的零元素,若 以常规方法,即以二维数组来存储稀疏矩 阵时产生如下问题: 1) 零值元素占了很多空间; 2) 如果进行计算,则会进行很多和零值 的运算,如是除法,还需判别除数是否为 零。
2 三角矩阵 以主对角线划分,三角矩阵有上三角 和下三角两种。如图所示。其中(a)图为下 三角矩阵:主对角线以上均为同一个常 数;(b)图为上三角矩阵,主对角线以下均 为同一个常数。
(1) 下三角矩阵 三角矩阵中的重复元素c可共享一个 存储空间,其余的元素正好有n(n+1)/2 个,因此,三角矩阵可压缩存储到向量 SA[0…n(n+1)/2]中,其中c存放在向量的 最后1个分量SA[n(n+1)/2]中。 该存储方式可节约n*(n-1)/2-1个存储 单元。
传统矩阵的转置算法为: for(col=1; col<=n ;++col) for(row=0 ; row<=m ;++row) b[col][row]=a[row][col] ;
时间复杂度为O(n×m) 当非零元素的个数tn和m×n同数量级时,算法 TransMatrix的时间复杂度为O(m×n2)。
以“行优先顺序”存储: (1) 第1行中的每个元素对应的(首)地址是: LOC[a1j]=LOC[a11]+(j-1) ×L (2) 第2行中的每个元素对应的(首)地址是: LOC[a2j]=LOC[a11]+n×L +(j-1) ×L (3) 第m行中的每个元素对应的(首)地址是: LOC[amj]=LOC[a11]+(m-1) n×L +(j-1) ×L
数据结构第五章 数组和广义表
5.3.1
特殊矩阵
1、对称矩阵 在一个n阶方阵A中,若元素满足下述性质: aij = aji 1≤i,j≤n 则称A为对称矩阵。 a11 1 5 1 3 7 a21 a 22 5 0 8 0 0 a31 a32 a33 1 8 9 2 6 ……………….. 3 0 2 5 1 an 1 a n 2 a n 3 …a n n 7 0 6 1 3
第5章
数组和广义表
5.1 数组的定义
5.2 数组的顺序表示和实现
5.3 矩阵的压缩存储
5.3.1 特殊矩阵
5.3.2 稀疏矩阵
5.4 广义表的定义
5.1 数组的定义
数组-----线性表的扩展 A =(a0,a1,a2,…,an-1)
a00 a10 ┇ Am×n= ai0 ┇ am-1,0 a01 … a0j … a11 … a1j … ┇ ai2 … aij … ┇ am-1,2 … am-1,j … a0,n-1 a1,n-1 ai,n-1 am-1,n-1 α0 α1 ┇ Am×n= α i ┇ α m-1
Assign( &A, e, index1, ..., indexn) 赋值操作 初始条件:A是n维数组,e为元素变量,随后是n个下标值。 操作结果:若下标不超界,则将e的值赋给所指定的A的元 素,并返回OK。 对于数组来说一旦维数确定了,每个元素的下标确定了, 那么整个数组就确定了,这样的一个数组结构除了能改变 某元素的值,其他的不能再改变。
5.2 数组的顺序表示和实现
数组类型特点: 1) 只有引用型操作,没有加工型操作; 2) 数组是多维的结构,而存储空间是一个一维的结构。 有两种顺序映象的方式。
有两种顺序映像方法: 1)以行序为主序(行优先,先行后列):先存储行号较小 的元素,行号相同者先存储列号较小的元素;
数据结构 第五章 数组和广义表

则行优先存储时的地址公式为: LOC(aij)=LOC(ac1,c2)+[(i-c1)*(d2-c2+1)+j-c2)]*L
数组基址
aij之前的行
数
总列数,即 第2维长度
aij本行前面
的元素个数
单个元素 长度
例2一个二维数组A,行下标的范围是1到6,列下标的范围是0
到7,每个数组元素用相邻的6个字节存储,存储器按字节编址。 288 个字节。 那么,这个数组的体积是
2.若对n阶对称矩阵A以行序为主序方式将其下三 角形的元素(包括主对角线上所有元素)依次存 放于一维数组B[1..(n(n+1))/2]中,则在B 中确定aij(i<j)的位置k的关系为( )。 A. i*(i-1)/2+j B. j*(j-1)/2+i C. i*(i+1)/2+j D. j*(j+1)/2+i
维界虽未变,但此时的a[32,58]不 再是原来的a[32,58]
例5:假设有三维数组A7×9×8,每个元素用相邻的6个字节存
储,存储器按字节编址。已知A的起始存储位置(基地址)为 1000,末尾元素A[6][8][7]的第一个字节地址为多少?若按 高地址优先存储时,元素A[4][7][6]的第一个字节地址为多 少? 答: 末尾元素A[6][8][7]的第1个字节地址= 1000 +(9*8*6+8*8+7)*6=4018 提示:将第1维看作“页码”,后面两维就是每页上的二维数组 。 计算地址 的意义: 只要计算出任一数组元素的地址,就 能对其轻松地进行读写操作!
4.已知数组A[0..9,0..9]的每个元素占5个存储 单元,将其按行优先次序存储在起始地址为 1000的连续的内存单元中,则元素A[6,8]的 地址为_________
数据结构讲义第5章-数组和广义表
5.4 广义表
5)若广义表不空,则可分成表头和表尾,反之,一对表头和表尾 可唯一确定广义表 对非空广义表:称第一个元素为L的表头,其余元素组成的表称 为LS的表尾; B = (a,(b,c,d)) 表头:a 表尾 ((b,c,d)) 即 HEAD(B)=a, C = (e) D = (A,B,C,f ) 表头:e 表尾 ( ) TAIL(B)=((b,c,d)),
5.4 广义表
4)下面是一些广义表的例子; A = ( ) 空表,表长为0; B = (a,(b,c,d)) B的表长为2,两个元素分别为 a 和子表(b,c,d); C = (e) C中只有一个元素e,表长为1; D = (A,B,C,f ) D 的表长为4,它的前三个元素 A B C 广义表, 4 A,B,C , 第四个是单元素; E=( a ,E ) 递归表.
以二维数组为例:二维数组中的每个元素都受两个线性关 系的约束即行关系和列关系,在每个关系中,每个元素aij 都有且仅有一个直接前趋,都有且仅有一个直接后继. 在行关系中 aij直接前趋是 aij直接后继是 在列关系中 aij直接前趋是 aij直接后继是
a00 a01 a10 a11
a0 n-1 a1 n-1
a11 a21 ┇ a12 a22 ┇ ai2 ┇ … amj … amn … aij … ain … … a1j a2j … … a1n a2n β1 β2 ┇ βi ┇ βm
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第5章数组和广义表(4学时)(一)教学目的:掌握数组的定义及顺序表示与实现; 掌握矩阵的压缩存储;广义表的定义及存储结构。
(二)教学重点:1、数组的定义及其存储2、特殊矩阵的压缩存储3、稀疏矩阵逻辑结构和存储结构4、广义表的逻辑结构和存储结构5、数组和广义表的操作应用举例 (三)教学难点:1、矩阵的压缩存储2、广义表的存储结构5.1数组的定义一、数组的抽象类型定义:数据对象:D=nj j j a 21{ |n(>0)称为数组的维数,bi 是数组第i 维的长度,ji 是数组元素的第i 维下标,nj j j a 21∈ElemSet}数据关系:R={R1,R2,…,Rn} Ri=ni n i j j j j j j a a 111,{+<>0≤jk ≤bk-1,1≤k ≤n 且k ≠i , 0≤ji ≤bi-2,ni n i j j j j j j a a 111,+∈D ,I=2,…,n}二、数组基本操作:1、InitArray(&A,n,bound1,…,boundn)操作结果:若维数n 和各维长度合法,则构造相应的数组A ,并返回OK 。
2、DestroyArray (&A ) 操作结果:销毁数组A 。
3、Value(A,&e,indeex1,…,indexn)初始条件:A 是n 维数组,e 为元素变量,随后是n 个下标值。
操作结果:若各下标不超界,则e 赋值为所指定的A 的元素值,并返回OK 。
4、Assign(&A,e,index1,…,indexn)初始条件:A 是n 维数组,e 为元素变量,随后是n 个下标值。
操作结果:若下标不超界,则将e 的值赋给所指定的A 的元素,并返回OK 。
三、数组与线性表的关系:1、二维数组与线性表的关系:以把二维数组看成是这样一具定长线性表:它的每个数据元素也是一个定长线性表。
A=(a0,a1,…,ap) (p=m-1或n-1)其中每个数据元素aj 是一个列向量形式的线性表aj=(a0j,aij,…,am-1j) 0≤j ≤n-1 ai=(ai0,ai1,…,ai,n-1) 0≤i ≤m-1在C 语言中,一个二维数组类型可以定义为其分量类型为一维数组类型的一维数组类型,也就是说,typedef ElemType Array2[m][n];等价于 typedef ElemType Array1[n]; typedef Array1 Array2[m];0001020,10,100011011121,1101,1111,11,01,01,11,11,1......,...n n n n m n m m m m n m n a a a a a a a a a a a a aa Am n Am n a a a a a a -------------⎡⎤⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⨯=⨯=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎣⎦(a) (b)00010,110111,11,01,11,1((),(),,())m n n n m m m n A a a a a a a a a a ⨯------=(C )图5·1二维数组图例(a )矩阵形式表示;(b )列向量的一维数组;(c )行向量的一维数组 2、n 维数组与线性表的关系:同理,一个n 维数组类型可以定义为其数据元素为n-1维数组类型的一维数组类型。
四、数组的基本操作数组一旦被定义,它的维数和维界就不再改变。
因此,除了结构的初始化和销毁之外,数组只有存取元素和修改元素值的操作。
5.2数组的顺序表示和实现一、二维数组的顺序存储:则用一组连续存储单元存放数组的数据元素就有个次序约定问题。
对二维数组可有两种存储方式:在扩展BASIC 、PL/1、COBOL 、PASCAL 和C 语言中,用的都是以行序为主序的存储结构,而在FORTRAN 语言中,用的是以列序为主序的存储结构。
(a ) 以列序为主序 (b )以行序为主序 图5.2 二维数组的两种存储结构 二、数组的地址计算:1、二维数组的地址计算:假设每个数据元素占L 个存储单元,则二维数组A 中任一元素aij 的存储位置可由下式确定LOC (i,j )=LOC (0,0)+(b2×i+j )L (5——1)式中,LOC (i,j )是aij 的存储位置;LOC (0,0)是a00的存储位置,即二维数组A 的起始存储位置,也称为基地址或基址。
2、n 维数组地址计算:LOC(j1,j2,…,jn)=LOC(0,0,…,0)+(b2×…bn ×j1+b3×…bn ×j2+…+bn ×jn-1+jn)L=LOC(0,0,…,0)+(111nn i kni k i j bj -==++∑ )L或缩写成LOC (j1,j2,…,jn )=LOC(0,0,…,0)+1ni ii c j=∑ (5—2)其中Cn=L,ci-1=bi ×ci, 1<i ≤n 。
5.3 矩阵的压缩存储1、压缩存储:为多个值相同的元只分配一个存储空间;对零元不分配空间。
2、特殊矩阵:假若值相同的元素或者零元素的矩阵中的分布有一定规律,则我们称此类矩阵为特殊矩阵。
3、稀疏矩阵:非零元分布没有任何规律,但是数量很少,这样的矩阵我们称为稀疏矩阵。
5.3.1特殊矩阵一、对称矩阵: 1、对称矩阵定义:若n 阶矩阵A 中的元满足下述性质aij=aji 1≤i,j ≤n ,则称为n 阶对称矩阵。
2、对称矩阵的压缩存储:对于对称矩阵,我们可以为每一对对称元分配一个存储空间,则可将n2个元压缩存储到n(n+1 )/2个元的空间中。
3、压缩存储元素与存储地址之间的对应关系:假设以一维数组sa[n(n+1)/2]作为n 阶对称矩阵A 的存储结构,则sa[k]和矩阵元aij 之间存在着一一对应的关系:(1)12(1)12i i j i j k j j i j j-⎧+-≥⎪⎪=⎨-⎪+-<⎪⎩当当 (5—3)k= 0 1 2 3 2)1(-n n 12)1(-+n n图5.3 对称矩阵的压缩存储二、三角矩阵:所谓下(上)三角矩阵是指矩阵的上(下)三角(不包括对角线)中的元均为常数c 或零的n 阶矩阵。
则除了和对称矩阵一样只存储其下(上)三角中的元之外,再加一个存储常数c 的存储空间即可。
三、对角矩阵:所谓对角矩阵是指所有的非零元都集中在以主对角线为中心的带状区域中。
即除了主对角线上和直接在对角线上、下方若干条对角线上的元之外,所有其他的元皆为零。
如图5.4所示。
对这种矩阵,我们也可按某个原则(或以行为主,或以对角线的顺序)将其压缩存储到一维数组上。
图5.4 三对角矩阵5.3.2 稀疏矩阵假设在m ×n 的矩阵中,有t 个元素不为零。
令δδ称,n m t⨯=为矩阵的衡疏因子。
通常认为05.0≤δ时称为稀疏矩阵。
⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧-=⎪⎪⎪⎪⎭⎪⎪⎪⎪⎬⎫⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧--=000000000140000000070000000240090180001215001300000700150000241800000240001400003000000000009120T M图5.5 稀疏矩阵M 和T一.三元组顺序表1、三元组顺序表的定义:假设以顺序存储结构来表示三元组表,则可得稀疏矩阵的一种压缩存储方式——我们称之为三元组顺序表。
#define MAXSIE 12500 //假设非零元个数的最大值为12500 Typedef struct{int i,j: //该非零元的行下标和列下标ElemType e;}Triple;Typedef struct{Triple data[MAXSIZE+1];//非零元三元组表,data[0]未用int mu, nu, tu; //矩阵的行数、列数和非零元个数}TSMatrix;在此,data域中表示非零元的三元组是以行序为主序顺序排列的。
2、矩阵的转置运算。
从a转置为b的主要过程:(1)将矩阵的行列值相互交换;(2)将每个三元组中的i和j要互调换;(3)重排三元组之间的次序便可实现矩阵的转置。
i j v1 2 121 3 93 1 -33 5 144 3 245 2 186 1 156 4 -7a.datai j v1 3-31 61 52 11 22 51 83 1 33 42 44 6 -76314b.data 可以把两种处理方法:(1)按照b.data 中三元组的次序依次在a.data 中找到相应的三元组进行转置。
换句话说,按照矩阵M 的列序来进行转置。
为了找到M 的每一列中所有的非零元素,需要对其三元组表a.data 从第一行起整个扫描一遍,由于a.data 是以M 的行序为主序来存放每个非零元的,由此得到的恰是b.data 应有的顺序。
其具体算法描述如算法5.1所示。
Status TransposeSMatrix(TSMatrix M, TSMatrix &T){ //采用三元组表存储表示,求稀疏矩阵M 的转置矩阵T 。
T.mu=M.nu; T.nu=M.mu; T .tu=M.tu; if(T.tu){ q=1;for(col=1;col <M.nu; ++col ) for(p=1;p <=M.tu; ++p ) if(M.data[p].j==col){T.data[q].i=M.data[p].j; T.data[q].j=M.data[p].i; T.data[q].e=M.data[p].e; ++q;} }return OK;}//TransposeSMatrix 算法 5.1(2)按照a.data 中三元组的次序进行转置,并将转置后的三元组置入b 中恰当的位置。
如果能预先确定矩阵M 中每一列(即T 中每一行)的第一个非零元在b.data 中应有的位置,那么在对a.data 的三元组依次作转置时,便可直接放到b.data 中恰当的位置上去。
为了确定这些位置,在转置前,应先求得M 的每一列中非零元的个数,进而求得每一列的第一个非零元在b.data 中应有的位置。
在此,需要附设num 和cpot 两个向量。
Num[col]表示矩阵M 中第col 列中非零元的个数,cpot[col]指示M 中第col 列的第一个非零元在b.data 中的恰当位置。
显然有⎩⎨⎧≤≤-+-==nu a col col numcol cpot col cpot cpot .2]1[]1[][;1]1[ (5-4) 例如,对图5.5的矩阵M.num 和cpot 的值如表5.1所示。