埃斯顿EDB伺服随机手册
埃斯顿EDB调试指导

埃斯顿EDB系列伺服调试指导手册第一章:调试前期注意事项伺服使用前的注意事项1.首先应确认主回路、控制回路输入电源是否接入正常?(尤其主回路三相200V)2.确认机械处于安全位置,防止出现意外。
3.请进行抗干扰处理和接地,请分离强电线和弱电线,同时尽量缩短接线距离,信号线上如有干扰,容易产生振动和运行不正常。
4.通电时不要进行插座的拔、插动作,请断电之后,再进行插座的拔、插。
5.请不要连续地在负加载情况下运行,不能在负载转动电机、由再生/制动器制动的情况下连续运行。
用户设定“适配电机型号参数”流程:a、查看购买的伺服电机型号;b、查看购买的伺服驱动器型号;c、根据下表,确认伺服电机型号与伺服驱动器型号是否适配,如不适配请联系厂家或销售商;d、确认伺服电机型号与驱动器型号匹配后,接通驱动器控制电源,对照下表中所购买的伺服电机型号后面的“适配电机型号参数Pn218”的数值重新设定参数Pn218,然后断电,电机型号设定就此完成。
第二章EDB伺服参数及主要控制模式介绍一、基本功能参数1.Pn000 使用/不使用伺服ON输入信号(S-ON) (0-1)[0]使用伺服ON输入信号(/S-ON)[1]不使用伺服ON输入信号(/S-ON)2.Pn001 使用/不使用禁止正转输入信号(P-OT) (0-1)[0]使用禁止正转输入信号(P-OT)[1]不使用禁止正转输入信号(P-OT)3.Pn002 使用/不使用禁止反转输入信号(N-OT) (0-1)[0]使用禁止反转输入信号(N-OT)[1]不使用禁止反转输入信号(N-OT)4.Pn003 选择瞬间停电时执行的操作(0-1)[0]瞬间停电时不输出伺服报警输出(ALM)[1]瞬间停电时输出伺服报警输出(ALM)5.Pn004 使用OFF、超程时的停止方式(0-5)[0]DB制动且停转后解除制动[1]自由停止[2]伺服OFF时实施DB;超程(OT)时实施反接制动,停止伺服OFF[3]伺服OFF时自由停止;超程(OT)时实施反接制动,停止伺服OFF[4]伺服OFF时实施DB;超程(OT)时实施反接制动,停止后零钳位[5]伺服OFF时自由停止;超程(OT)时实施反接制动,停止后零钳位6.Pn005 伺服OFF时是否清除偏差脉冲(0-3)[0] 伺服OFF 时,清除偏差脉冲[1] 伺服OFF 时,不清除偏差脉冲[2] 伺服OFF 或超程时,清除偏差脉冲[3] 伺服OFF 或超程时,不清除偏差脉冲7.Pn006 选择旋转方向(0-1)[0]从电机的负载侧看,CCW方向为正转[1]从电机的负载侧看,CW方向为正转8.Pn041 选择控制方式(0-14)[0]速度控制(模拟指令)[1]位置控制(脉冲列指令)[2]转矩控制(模拟指令)[3]速度控制(接点指令)←→速度控制(零指令)[4]速度控制(接点指令)←→速度控制(模拟指令)[5]速度控制(接点指令)←→位置控制(脉冲列指令)[6]速度控制(接点指令)←→转矩控制(模拟指令)[7]位置控制(脉冲列指令)←→速度控制(模拟指令)[8]位置控制(脉冲列指令)←→转矩控制(模拟指令)[9]转矩控制(模拟指令)←→速度控制(模拟指令)[10]速度控制(模拟指令)←→零钳位控制[11]位置控制(脉冲列指令)←→位置控制(脉冲禁止)[12]位置控制(参数指令)[13]速度控制(参数指令)[14]刀架控制1、速度控制即电机按照给定的速度指令进行运转。
埃斯顿PRONET用户手册

耐热等级
F
环境温度
0 to +40℃ (不结冻)
环境湿度
20% to 80% RH (不结露)
保护方式
全封闭,自冷,IP65 (除输出轴承和连接器)
抗振性能
49m/s2
注:括号内的数值表示的是带制动器电机的值。
● 转矩-转速特性 (A:连续工作区域,B:反复工作区域)
10A□A□□ 1000 3.18 9.55 5.3 15.9
ESTUN 伺服电机 EML 型
【1+2】 【3】 【4】 【5】 【6】 【7】
【1+2】额定输出功率
记号
规格
10 1.0kW
27.0 14.5(15.1)
36.0 2000 3000 19.0(19.6)
编码器
标准 选项
17 位增量式:131072P/R 17 位绝对值:131072P/R; 旋转变压器
耐热等级
F
环境温度
0 to +40℃ (不结冻)
环境湿度
20% to 80% RH (不结露)
保护方式
全封闭,自冷,IP65 (除输出轴承和连接器)
AC 伺服驱动器
ProNet 用户手册
ESTUN
产品体系
小功率
系列
EMJ
3000min-1
EMG
2000min-1
EML
1000min-1
EMB
1500min-1
伺服电机
功率
200W 400W 750W 1000W 1.0kW 1.5kW 2.0kW 3.0kW 5.0kW 1.0kW 2.0kW 3.0kW 4.0kW 7.5kW 11kW 15kW
ESTUN 伺服电机 EMG 型
埃斯顿伺服电机技术解答
伺服电机技术解答三相交流永磁同步伺服电机简称交流伺服电机(AC server motor)或伺服电机,由于它具有高响应、高精度、运行平稳、恒转矩输出、能过载、低噪声、结构简介、可靠性高、免维护等优点,是目前旋转电机中最佳的控制电机。
本章以EDB驱动器和其配套伺服电机为例,简述伺服电机在应用中的有关问题及注意事宜,其原则和方法同样适用于其它型号的驱动器配伺服电机。
伺服电机选型:伺服电机的选型是多个因素综合考虑、合理选择的过程,一般应着重注意这几个参数的选择:电机的额定转矩、电机运行的最高转速、负载惯量及电机转子惯量、加减速时所需要的过载能力、电机起停频率等。
通过机械传动机构加在电机上的负载有二种,即负载转矩和负载惯量。
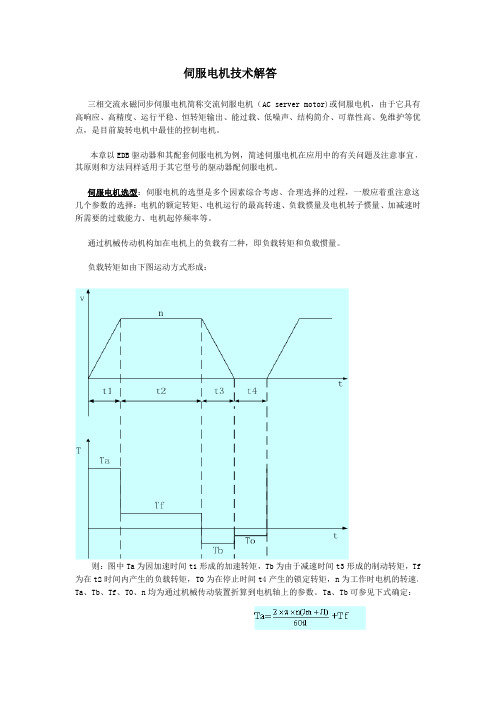
负载转矩如由下图运动方式形成:则:图中Ta为因加速时间t1形成的加速转矩,Tb为由于减速时间t3形成的制动转矩,Tf 为在t2时间内产生的负载转矩,T0为在停止时间t4产生的锁定转矩,n为工作时电机的转速。
Ta、Tb、Tf、T0、n均为通过机械传动装置折算到电机轴上的参数。
Ta、Tb可参见下式确定:式中:Jm—电机转子惯量(),Jl—折算到电机轴上的负载惯量(),t单位:sec,n单位:rpm,Ta、Tf单位:Nm。
由下式确定一个周期电机转矩的均方根值:确定预选电机的额定转矩大于Trms值;确定预选电机的额定转速大于实际运行的最高转转速;其过载转矩大于Ta、Tb中最大值,即可选定伺服电机。
加在电机轴上的负载惯量,对伺服电机的灵敏度及快速移动、精确定位有很大的影响。
较大的负载惯量,当指令速度发生变化时,电机达到指令速度的时间会较长;多轴同时运动时,会使形成的轨迹偏离指令轨迹过大,造成较大的误差。
所以,选择机械传动机械,使折算到电机轴上的负载惯量合适,是伺服电机选型中重要的过程。
机械传动不仅要满足脉冲当量、转矩(功率)放大等技术要求,更要注重负载惯量与电机的适配。
负载惯量是否与电机相适配的标准,是指负载惯量折算到电机轴上的负载惯量Jl,其数值与电机转子惯量的倍数关系。
埃斯顿伺服选型流程

Vℓ
2、丝杆(水平) A、负载扭力TL(N • m ) TL= 9.8 ×μ×M×PB 2π ×R ×η B、负载惯量JL(㎏ • ㎡) 直线运动部份 PB )² JL2=M ×( 2πR *JL = JK+JL1 +JL2 C、负载轴运行速度Nℓ(r/min) Vℓ Nℓ= PB
1/R
M
μ
PB
※负载扭力及负载 惯量计算公式
※如何选定伺服 电机(3∕3 )
2、负载惯量<3~5倍电机转子惯量
3、最大速度<电机最大转速
4、负载在85﹪以下
5、电机的扭矩特性
伺服电机连接传动机械的确认 (含減速比)
制作运转曲线(速度曲线)
※ 伺服电机的选用
流程(1∕2)
计算回转速度 计算負载慣量(GDL²) 计算負载扭力(TL) 1、增加減速机构 2、降低瞬间負载惯量 (GDL²) 3、更改为容量更大的 电机 4、变更运转曲线(速度 曲线) NO
TL= 9.8 ×μ×M×PB 2π ×R ×η =
= 3000(r/min) 0.05 PB N M= N ℓ ×1/R = 3000 × 1= 3000 (r/min) 9.8×0.2×80×0.005 2π × 1 ×0.9
15
=0.139(N•m)
※伺服电机 选择范例
4、负载惯量 丝杆部份 JB= π ×ρ×L×D⁴= π ×7.87×10¯³×0.8 ×( 0.016)4
应用场合:冲床机械定尺寸送料及切割机
6、台车传动
1、旋转运动 通常应用于分度盘
※运动方向
2、水平运动 通常应用于滚珠丝杆、齿轮、皮带、 链条传动元件
3、垂直运动 通常应用于机械升降轴、机械手臂上下轴
1、绘制速度曲线图
埃斯顿伺服在雕铣机床调试资料

增益注意事项
伺服位置控制的注意事项
1、位置环增益Pn104设的太小(<16),有可能会引起定位不到位的情况。 2、 如两轴(多轴)是插补关系,则这两轴的位置增益、位置前馈、速度偏 置应尽量设得靠近或一致。 3、使用高增益有助于快速定位,减小跟随误差,注意位置增益和速度增益 的匹配。 4、监控的位置(Un009~Un014)是经过电子齿轮计算后的。
惯量测试步骤及注意事项(五)
步骤一:首先根据负载情况,判断是否适合进行惯量检测;
步骤二:在能进行惯量检测的情况下进行惯量检测Fn009,例如检测数值 为10.3,单位为Kg· cm2;(进行此步操作后,监视Un015,其显示的值为负载 惯量百分比,将其设入Pn106)。 步骤三:根据现场工况,设置Pn112的值为0~100%。
1. 性价比优势 2. 优异的零漂抑制能力 3. 优秀的响应和跟随性能 4. 超强的恒扭矩输出能力 5. 优秀的低速平稳运动表现 6. 优秀的抗干扰和自干扰抑制表现 7. 新品种、新功能的研发能力 8. 伺服通讯功能的应用
第三部分:PRONET伺服操作
基本模式切换(一)
参数设定操作(二)
监视模式(二)
第四部分:雕铣机调试介绍
系统-伺服配线图
伺服位置控制模式下的参数
位置控制
位置控制普遍应用在各种定位场合,一般情况下伺服通过接受脉冲来进行位 置控制,脉冲的个数决定了位置,脉冲的频率决定了电机运行的速度。一个脉冲 对应的位置当量,取决于机械结构和电子齿轮。 位置控制中使用到的参数 Pn004.2 脉冲形式 Pn102 速度环增益 Pn103 速度环积分时间常数 Pn104 位置环增益 Pn105 转矩指令滤波常数 Pn106 负载惯量百分比 Pn112 位置前馈 Pn201 电子齿轮分子 Pn202 电子齿轮分母 Pn204 位置指令加减速时间参数 Pn205 位置指令一次滤波、二次滤波选择
SAMSON 伺服 技术手册600

PROP R O D U C TS P E C I F I C A T I O N S H E E TA M P L I F I E R STYPE:POWER AMPLIFIERSPRODUCTDESCRIPTIONSERVO 600POWER AMPLIFIERSERIESCATEGORYSERVO 600AMPLIFIERSFRONT PANELBACK PANELGENERAL DESCRIPTIONThe Samson Servo 600 stereo power amplifier has been designed to provide robust, clean output with low distortion and wide dynamic range, along with the dependability demanded by the most professional audio engineers and installers.The convenient 2 rack-space design is compact, and yet there’s plenty of power available, with 2 x 225 Watts at 8Ω, 2 x 300 Watts at 4Ω over the full frequency spectrum, from 10 Hz to 55 kHz.For mono applications, a Bridge mode links both channels of the amplifiers, thus providing even more single channel power, with a power rating of 600 watts into an 8 Ohm load.Input connections are available for both unbalanced RCA connections and balanced 1/4-inch TRS connections. For the outputs, the Servo 600 amplifier provides standard 5-way binding posts and 1/4” phone jacks. Front-panel controls and displays include a power switch with LED indicator, as well as independent left and right channel input level controls. To help you set the correct operating levels, the Servo 600 amplifier includes front panel Signal, Peak and Protection LED indicators. There's also a ten-segment VU meter to help you set a good operating level.Like all serious power amplifiers, the Servo 600’s internal electronics are based around a serious power-core, with an over-sized toroidal transformer and large extruded heat sink. To keep the Servo 600 amplifierrunning cool, the design employs twin internal wind tunnels with forced-air cooling via two temperature-sensitive, variable speed fans, which greatly reduce the chance of thermal and overheating problems. Multi-stage protection for power-up, over-heating, over-current, short circuit, low outputimpedance and DC voltage, assures high reliability under the most demanding situations.The Servo 600 amp is road tough with its all steel chassis and 19-inch rack mount design. The Servo 600 amplifier is ready for a life on the road, or to make its home in a fixed installation.Optimized for live sound venues, houses of worship, commercial installations, and for driving small and medium-sized live PA systems, the Servo Series amplifiers will deliver reliable power from gig-to-gig, venue-to-venue and day-to-night.FEATURES> P ower to spare - 2 x 225 Watts at 8Ω, 2 x 300 Watts at 4Ω> F or mono applications, a Bridge mode links both channelsof the amplifiers, thus providing even more power, with a power rating of 600 watts driving an 8 Ohm load.> C lean, crisp sound - Impressive audio specifications suchas 0.04% THD, dynamic range of 105 dB, crosstalk of 80 dB, and frequency response of 10 Hz to 55 kHz guarantee ultra-clean sound quality.> I ndependent input level controls for each channel allowprecision adjustments.continues»©2006 Samson v1.0 5/06SERVO 600 PRODUCT SPECIFICATION SHEETSERIES DESCRIPTION CATEGORYSERVO 600POWER AMPLIFIER AMPLIFIERSARCHITECT’S & ENGINEER’S SPECIFICATIONSThe Samson Servo 600 shall be a two space, rackmount stereo power amplifier. It shall deliver 300 watts per channel at 4 Ohms or 600 watts into 8 Ohms in bridge mono mode. It shall have 1/4 inch balanced inputs and RCA unbalanced inputs. It shall be a bi-polar design and use a toroidal transformer. The front panel shall have volume controls and LED metering for each channel. The rear panel shall also have 5 way binding posts for the amplifier outputs.SERVO 600 SPECIFICATIONSStereo both channel driven8 Ohms ..............................225 Watts x 24 Ohms ..............................300 Watts x 2Bridged mono8 Ohms ..............................600 WattsSignal to Noise Ratio (20Hz-20k) ......104dBDistortion (SMPTE-IM) .....................0.04%Input sensitivity @8 Ohms ................1.24V(4dBu)Voltage Gain....................................34dBOutput Circuitry Class.......................ABAC Power@1/8 rated power 4 Ohms, max. .......1.3A@1/3 rated power 4 Ohms, max. .......3.3A@ rated power 4 Ohms, max. ............10ADistortion (typical @4 Ohms)20Hz-20kHz,10dBbelow rated power ...............0.03%IkHz,rated power .................0.1%Frequency Response@8 Ohms 1Watt, 20Hz-20kHz ..........0/-0.5dBDamping Factor (400Hz) (350)Input Impedance ..............................15k Ohm Unbalanced,30k Ohm BalancedInput Clipping ..................................10 Vrms(22dBu) Cooling...........................................C ontinuously variable speed,fan forced airConnectors (each channel)Input .................................R CA unbalanced and1/4”(6.3mm)TRS, balanced Output ...............................5-way Binding post and1/4” Phone Controls..........................................A C power switch, Channel 1and 2 volumeIndicators .......................................P ower on (blue), Protection(amber), Signal (green) foreach Ch., Peak(red) for eachCh. Level: , -24 dB, -20 dB,-16 dB, -12 dB, -8 dB, -4dB, -2 dB, O, +2 dB and+4 dB (PEAK). Protection.......................................S hort circuit, Thermal,Currentlimit,DC offset,Current inrush,RF protection, Turn on/Turnoff mutingPower Requirements.........................115/230,240VAC,50/60Hz Dimensions (W x H x D) ....................19” x 3.5” x 11.7”(483mm x 89mm x 297mm) Net Weight ......................................24 lbs (10.91 kg)FEATURES(continued)>10 segment LED signal indicators for each channel continuously display power output levels and allow you to correct for overloading (clipping) conditions.>U nique stable bipolar circuit design that continuously keeps DC output during idling at or near zero volts (thus keeping idle speakers at their zero point). This serves to minimize heat overload problems by effectively preventing the Servo 600 from applying power when unnecessary.>F orced air cooling via two temperature-sensitive, variable speed fans provides reliable performance without thermal and overheating problems.>P rotection relay circuitry (with dedicated LEDs for each channel) that guards against overheating or faulty wiring conditions and also prevents “thumps” when powering on or off. This means that you can use the Servo Series with a single power strip into which a mixer or other audio devices are connected, without danger of damage to connected speakers. >I nput connectors for each channel accommodate both RCA or balanced 1/4-inch TRS plugs.>O utput connections are made via 5-way binding posts.>T oroidal transformer power supply for high current and low profile. >T he Servo 600 can be mounted in any standard 19" rack (taking just two rack spaces), making it easy to integrate the amp into any fixed or traveling PA rig.>R ugged construction (an all-steel chassis with a cool gray finish and a lightweight anodized aluminum heat sink) makes the Servo 600 eminently roadworthy.>E xtended three-year warranty.。
埃斯顿
键 QK QL
16 16 22 22 4 4 4 4
D1004650 B06A001
W
5 5 6 6
T
5 5 6 6
U
3 3 3.5 3.5
153(193) 123(163) 173(213) 143(183) 191(234) 156(199) 211(254) 176(219)
(注)括号内的数值表示的是带制动器电机的尺寸。
1
2
EDB系列交流伺服随机手册
EDB系列交流伺服随机手册
第一章
1.1 伺服驱动器
安装与尺寸
4) 安装标准 请务必遵守下图所示的控制柜内的安装标准,该标准适用于将多个伺服驱动器并 排安装在控制柜内的场合(以下简称"并排安装时")。
EDB系列伺服驱动器是基座安装型伺服驱动器。如果安装方法错误,则可能会发 生故障,所以请根据下述的注意事项进行正确安装。 1) 保管条件 在伺服驱动器不使用时,请在 [-20~+85℃] 的温度范围内进行保管。 2) 安装场所 关于安装场所的注意事项如下。 设置条件 安装在控制柜里时 靠近热源安装时 靠近振动源安装时 安装在有腐蚀性气 体的场所时 其他 安装注意事项 安装在控制柜里时,对控制柜的大小、伺服驱动器的配置以及冷却 的方法进行设计,以使伺服驱动器的周边部分温度在55℃以下。 为保持伺服驱动器周围温度在55℃以下,请控制热源的辐射及对 流,防止温度上升。 为避免振动传至伺服驱动器,请在伺服驱动器的安装面下安装防 振器具。 安装在有腐蚀性气体的场所时,请设法防止腐蚀性气体的侵入。 虽然不会即时产生影响,但是会导致电子部件以及与接触器相关 部件的故障。 请不要安装在高温、潮湿、多粉尘、多铁粉的场所。
55 79 79 79 4 3.2 3.2 3.2 12 18 18 18 130 180 180 180 145 110 9 200 114.3 13.5 200 114.3 13.5 200 114.3 13.5
埃斯顿PRONET伺服系统调试方法-精选文档

3.监视 及 辅助
4.增益参数调试 5.报警 及 排除
速 度 控 制 可 能 用 到 的 参 数
9、 Pn310 速度指令曲线形式
10、Pn311 S曲线的过渡形态
PRONET伺服调试控制参数
指令电压 (±10V) 速度范围 (±3000rpm) 指令速度 (rpm)
设定的斜率 指令电压 (V)
Pn300
1.调试准备事项 2.调试控制参数
Pn309效果图
S曲线
3.监视 及 辅助
4.增益参数调试 5.报警 及 排除
PRONET伺服调试控制参数
速度控制调试时的注意事项
2.调试控制参数
3.监视 及 辅助
4.增益参数调试 5.报警 及 排除
PRONET伺服的接线注意事项
1.调试准备事项
2.调试控制参数
3.监视 及 辅助
4.增益参数调试 5.报警 及 排除
PRONET伺服调试前的注意事项
1CN输入输出信号 标准接线图
1.调试准备事项
2.调试控制参数
3.监视 及 辅助
1.调试准备事项 2.调试控制参数 指令速度 (rpm) 模拟指令自动 调整偏移量 指令速度
3.监视 及 辅助
4.增益参数调试 5.报警 及 排除 指令电压 (V)
(rpm)
偏移量手动调整范围 (-1024~+1024)
指令电压 (V)
Fn003效果图
Fn004效果图
PRONET伺服调试控制参数 Pn306、Pn307效果图
4.增益参数调试 5.报警 及 排除
注意:使用位置指令信号 和PG分频输出信号时 请选用带屏蔽的双绞线电缆
设定适配电机型号参数流程
a、 请确认购买的伺服电机型号; b、 请确认购买的伺服驱动器型号;
EDB伺服驱动介绍新
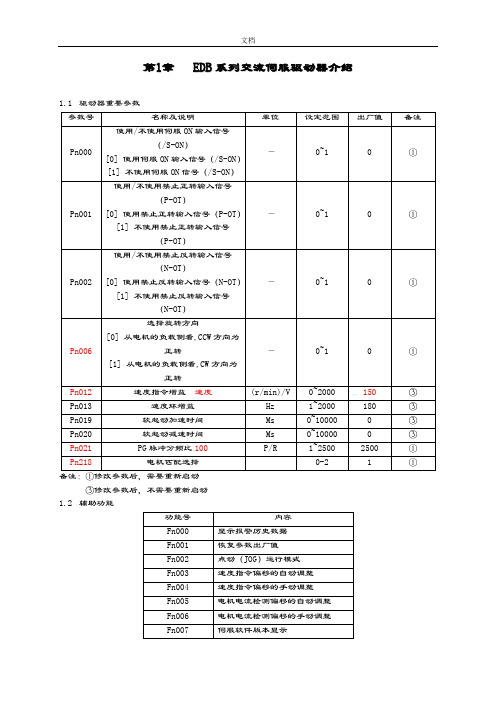
第1章E D B系列交流伺服驱动器介绍1.1驱动器重要参数③修改参数后,不需要重新启动1.2辅助功能1.3 监视功能用面板操作器可进行各种参数的设定,输入运转指令,运行显示状态等。
这里用初始显示状态来解释数字操作器的键名及功能。
第2章 基本运行方式的具体操作2.1 基本运行方式的切换切换数字操作器的基本运行方式,可执行电机运转状态显示,参数的设定,运转指令等。
基本运行方式包含有电机状态显示方式、参数设定方式、监视方式、辅助功能方式。
按MODE 键可切换方式。
2.2 状态显示方式下的操作在状态显示方式中用位数和简码表示伺服驱动器的状态。
1、 状态显示方式的选择打开电源时即进入状态显示方式。
如处于非状态显示方式,则用MODE 键切换到状态显示方式。
2、 状态显示方式的显示内容位数 简码TGON待机状态输入速度指令中 控制电源接通 主回路电源接通1)位数表示内容如下:22.3参数设定方式下的操作通过设定参数可选择、调整电机功能。
参数一览表请见1.1节。
■参数的数据修改顺序注意:用户可设定参数的数值,在1.1节的参数一览表中可确认修改的范围。
例:这里是将参数Pn-05的内容从100变更到85的操作步骤。
1、按MODE键,选择设定方式。
2、按INC键或DEC键选择参数号码。
3、按ENTER键,显示步骤2中所选的参数数据。
4、按INC键或DEC键,变更为希望的数据00085。
一直按键显示不停的变化。
当数据达到最大值(或最小值),按INC键(或DEC键)数据将不再增加(或减小)。
5、按ENTER键,保存数据,该数据将闪烁。
6、再按一次ENTER键,返回参数号码显示状态。
另外,在步骤3、4中如果按MODE键将跳过步骤5直截到步骤6,并且不会保存数据。
以上就是将参数Pn-05的内容从100变更到85的操作过程。
欲再次修改数据,可重复2到6的步骤即可。
2.4监视方式的操作在监视方式下可以监视输入伺服驱动器内的指令值,输入输出信号的状态,伺服驱动器的内部状态。
伊莱斯ESDB交流伺服驱动器使用说明书(V1.0版本)

安全注意事项本手册为ESDB系列伺服驱动器的操作指导手册。
本手册提供给使用者选型、安装、参数设置、现场调试、故障诊断及日常保养与维护的相关注意事项及指导。
为正确使用本系列伺服驱动器,请事先认真阅读本手册,并请妥善保存以备后用。
设备配套客户请将此手册随设备发给最终用户。
在本手册中,安全注意事项有以下几类:1、产品检查交流伺服驱动器必须与性能匹配的伺服电机配套使用。
损坏或有故障的产品不可投入使用,否则可能会导致火灾或设备故障。
如果用户自配电机,请联系我公司技术人员,否则不能保证驱动器正常运行。
2、安装禁止将产品暴露在有水气,腐蚀性、可燃性气体的场合使用,否则会导致触电或火灾。
禁止将产品用于阳光直射,灰尘、盐分及金属粉末较多的场所。
禁止将产品用于有水、油及药品滴落的场所。
3、配线制动电阻必须按指定方式连接,否则会损坏驱动器。
电源,否则会造成设备损坏、触电或火灾。
电机输出端子和电机接线端子4、操作注意通电前应确认伺服驱动器和伺服电机已安装稳妥,固定牢固,电源电压及接线正确。
必须先分开机械设备的联轴器或皮带等,设定值,测试伺服电机正常运行后,才能将负载接上,否则会损坏设备,发生故障。
运行时,禁止触摸任何旋转中的电机零件,否则可能会造成人员受伤。
设备运行时,禁止移动连接电缆,否则可能会造成人员受伤或设备损坏。
禁止频繁接通、关闭电源,如果需要请控制在一分钟一次以下。
5、故障处理除指定的专业人员外,请勿进行连接、安装、操作、拆卸与维修工作,有触电和损坏设请勿自行进行改造,有触电受伤的危险。
目 录第一章 产品说明 (1)1.1铭牌型号说明 (1)1.2驱动器各部分名称 (2)1.3伺服驱动器技术规范 (3)第二章 安装 (4)第三章 配线 (7)3.1外围设备的连接 (7)3.2伺服驱动器接线 (8)3.2.1 电源接线实例 (8)3.2.2 伺服驱动器标准接线图 (9)3.2.3 绝对值编码器接线 (10)3.2.4 旋转变压器接线 (10)第四章 接口 (11)4.1电源接线端子定义 (11)4.2CN1编码器反馈端子定义 (11)4.3CN2控制端子定义 (12)4.4CN3通信接口端子定义 (13)4.5开关量输入输出接口原理 (14)4.5.1 开关量输入接口原理 (14)4.5.2 开关量输出接口原理 (14)4.6位置脉冲指令输入接口原理 (15)4.7模拟量输入输出接口原理 (18)4.7.1 模拟指令输入接口原理 (18)4.7.2 模拟量输出接口原理 (19)4.8编码器信号输入输出接口原理 (19)4.8.1 编码器信号输出CN2接口原理 (19)4.8.2 编码器信号输入CN1接口原理 (20)第五章 面板操作 (21)5.1面板操作概述 (21)5.2菜单结构 (21)5.2.1状态参数查看操作 (22)5.2.2参数编辑操作 (23)5.2.3特殊功能参数 (24)第六章 通信功能 (25)6.1MODBUS通信概要 (25)6.2MODBUS通信协议 (25)第七章 参数与功能 (31)7.1参数一览表 (31)7.2参数设置详解 (39)7.3数字输入DI功能定义 (54)7.4数字输出DO功能定义 (56)第八章 报警与处理 (58)第九章 运行与调试 (61)9.1驱动器通电 (61)9.2空载运行调试 (61)9.3控制功能调试 (62)9.3.1 位置控制 (62)9.3.2 速度控制 (64)9.3.3 转矩控制 (65)第十章 伺服电机部分 (67)10.1铭牌型号说明 (67)10.2电机各部分名称 (68)10.3伺服电机的安装 (68)10.4伺服电机端子定义及连线 (73)附录A (75)n电机适配表 (75)n电缆型号 (76)n电机信号线(编码器线)电缆型号说明 (77)n电机动力线电缆型号说明 (77)第一章 产品说明1.1铭牌型号说明1、铭牌说明图1.1 伺服驱动器铭牌说明2、型号说明ESDB—15A E C开发顺序号编码器型号:E:增量式编码器P:省线式编码器S:绝对值编码器R:旋转变压器电压等级:A:220VB:380V输出功率:15×0.1KW=1.5KW产品序列号:ESDB图1.2伺服驱动器型号说明1.2驱动器各部分名称连接错误时易造成驱动器损坏。
埃斯顿PRONET伺服系统调试方法

将伺服系统与其他工业自动化设备集 成在一起,实现整体系统的协同调试, 提高生产效率。
智能化调试
借助人工智能和机器学习技术,实现 伺服系统的智能化调试,减少人工干 预和调试时间。
THANKS
感谢观看
04
调试过程中的常见问题及解决方法
控制器无法正常启动
总结词
控制器无法正常启动是伺服系统调试中 常见的问题之一,可能是由于电源故障 、控制器硬件故障或软件故障等原因引 起的。
VS
详细描述
在调试过程中,如果发现控制器无法正常 启动,首先应检查电源是否正常,确保电 源电压在规定范围内。如果电源正常,则 应检查控制器硬件是否出现故障,如连接 线是否松动、控制器板卡是否损坏等。如 果硬件正常,则可能是软件故障,可以通 过重启控制器或重新安装软件来解决。
02
调试前的准备工作
工具和配件准备
调试工具
准备示波器、万用表、信号发生 器等必要的调试工具,以便在调 试过程中进行信号检测、电压测 量等操作。
配件
确保备齐伺服驱动器、电机、编 码器等必要的配件,确保系统完 整性。
安全注意事项
01
02
03
断电操作
在开始调试前,务必确保 伺服系统已经完全断电, 以避免意外触电或损坏设 备。
接地保护
确保伺服系统正确接地, 以防止设备受到静电或雷 电的损坏。
安全隔离
在调试过程中,应将伺服 系统与其他设备进行隔离, 避免相互干扰或造成损坏。
系统检查与确认
检查接线
仔细检查所有连接线是否 正确连接,确保没有错接 或漏接的现象。
参数设置
核对并确认伺服系统的参 数设置,如电机型号、编 码器类型等,确保与实际 配置一致。
埃斯顿伺服电机技术解答
伺服电机技术解答三相交流永磁同步伺服电机简称交流伺服电机(AC server motor)或伺服电机,由于它具有高响应、高精度、运行平稳、恒转矩输出、能过载、低噪声、结构简介、可靠性高、免维护等优点,是目前旋转电机中最佳的控制电机。
本章以EDB驱动器和其配套伺服电机为例,简述伺服电机在应用中的有关问题及注意事宜,其原则和方法同样适用于其它型号的驱动器配伺服电机。
伺服电机选型:伺服电机的选型是多个因素综合考虑、合理选择的过程,一般应着重注意这几个参数的选择:电机的额定转矩、电机运行的最高转速、负载惯量及电机转子惯量、加减速时所需要的过载能力、电机起停频率等。
通过机械传动机构加在电机上的负载有二种,即负载转矩和负载惯量。
负载转矩如由下图运动方式形成:则:图中Ta为因加速时间t1形成的加速转矩,Tb为由于减速时间t3形成的制动转矩,Tf 为在t2时间内产生的负载转矩,T0为在停止时间t4产生的锁定转矩,n为工作时电机的转速。
Ta、Tb、Tf、T0、n均为通过机械传动装置折算到电机轴上的参数。
Ta、Tb可参见下式确定:式中:Jm—电机转子惯量(),Jl—折算到电机轴上的负载惯量(),t单位:sec,n单位:rpm,Ta、Tf单位:Nm。
由下式确定一个周期电机转矩的均方根值:确定预选电机的额定转矩大于Trms值;确定预选电机的额定转速大于实际运行的最高转转速;其过载转矩大于Ta、Tb中最大值,即可选定伺服电机。
加在电机轴上的负载惯量,对伺服电机的灵敏度及快速移动、精确定位有很大的影响。
较大的负载惯量,当指令速度发生变化时,电机达到指令速度的时间会较长;多轴同时运动时,会使形成的轨迹偏离指令轨迹过大,造成较大的误差。
所以,选择机械传动机械,使折算到电机轴上的负载惯量合适,是伺服电机选型中重要的过程。
机械传动不仅要满足脉冲当量、转矩(功率)放大等技术要求,更要注重负载惯量与电机的适配。
负载惯量是否与电机相适配的标准,是指负载惯量折算到电机轴上的负载惯量Jl,其数值与电机转子惯量的倍数关系。
伺服参数调整方法

位置环增益
位置环增益是交流伺服系统的基本指标之一,它与伺服 电机以及机械负载有着密切的联系。 通常伺服系统的位置环增益越高,电机速度对于位置指 令响应的延时减少,位置跟踪误差愈小,定位所需时间越短, 但要求对应的机械系统的刚性与自然频率也必须很高。而且 当输入的位置量突变时,其输出变化剧烈,机械负载要承受 较大的冲击。此时,驱动器必须进行升降速处理或通过上位 机用编程措施来缓冲这种变化。 当伺服系统位置环增益相对较小时,调整起来比较方便, 因为位置环增益小,伺服系统容易稳定,对大负载对象,调 整要简单些。同时,低位置环增益的伺服系统频带较窄,对 噪音不敏感。因此,作为伺服进给用时,位置的微观变化小, 但低位置环增益的伺服系统位置跟踪误差较大,进行轮廓加 工时,会在轨迹上形成加工误差。
Ti:积分时间参数[s] Kv:速度回路增益 [HZ]
速度环参数调节与负载惯量的关系 当负载对象的转动惯量与电动机的转动惯量之 比增大以及负载的摩擦转矩增大时,宜增大速度环 比例增益和积分时间常数,以满足运行稳定性的要 求。 当负载对象的转动惯量与电动机的转动惯量之 比减小以及负载的摩擦转矩减小时,宜减小速度环 比例增益和积分时间常数,保证低速运行时的速度 控制精度。
位置环和速度环参数调整不合适对伺服性能的影响
3、位置环增益 数值设置太高: 在位置伺服系统中,调高位置增益虽然可以使得电机速 度对于位置指令响应的延时减少,但位置环增益过高引起系 统开环的总增益加大,易造成系统不稳定,可体现为电机速 度波动有所加剧。 数值设置太低: 在伺服系统中,位置环的工作频率远比速度环要低。位 置环增益过低时,系统难以抵消在速度响应过程中造成的位 置偏差,从而导致电机的速度跟踪严重滞后于位置指令速度。
转矩指令滤波时间常数 机械系统在某些情况下可能会出现转矩共振现 象,产生尖锐的振动噪音。通过增加转矩指令滤波 时间常数可减弱或停止此振动噪音。 但是此参数与积分时间常数一样,都会对系统 反应造成延迟。因此,不可将此参数的值设得太大。
埃斯顿伺服参数及IO接线

埃斯顿伺服参数及IO接线一、速度模式(内部接点)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-15——/P-CON 零钳位CN1-41——/P-CL 内部速度选择输入CN1-42——/N-CL 内部速度选择输入CN1-9——/S-RDY 伺服准备就绪输出/P-CON /P-CL /N-CL 运行速度0 0 0 00 0 1 speed10 1 0 speed20 1 1 speed31 0 0 speed41 0 1 speed51 1 0 speed61 1 1 speed72、参数设置Pn000.0——0 外部伺服ON 需重启Pn005.1——3 控制方式:内部速度控制(接点)需重启Pn316——内部设定速度1Pn317——内部设定速度2Pn318——内部设定速度3Pn319——内部设定速度4Pn320——内部设定速度5Pn321——内部设定速度6Pn322——内部设定速度7Pn306——加速时间二、位置模式(内部接点)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-9——/S-RDY 伺服准备就绪输出CN1-11——/COIN 定位完成输出2、参数设置Pn000.0——0 外部伺服ON 需重启Pn201——电子齿轮比分子需重启Pn202——电子齿轮比分母需重启Pn005.1——C 控制方式:内部位置控制(接点)需重启Pn600——×10000脉冲Pn601——×1脉冲Pn632——点位速度控制1Pn684——0 选择点位控制的终点三、位置模式(脉冲列指令)1、IO接线CN1-13——24VDC+CN1-14——/S-ON 伺服ON 输入CN1-31——/PULS 指令脉冲输入CN1-32——/SIGN 指令符号输入CN1-34——24VDC+ 集电极开路电源输入CN1-9——/S-RDY 伺服准备就绪输出CN1-11——/COIN 定位完成输出2、参数设置Pn000.0——0 外部伺服ON 需重启Pn201——电子齿轮比分子需重启Pn202——电子齿轮比分母需重启Pn005.1——1 控制方式:位置控制(脉冲列指令)需重启Pn004.2——0 符号+脉冲指令四、辅助参数Fn001 恢复出厂值伺服OFF时可设Fn002 点动(JOG)。
埃斯顿EDB、EDC交流伺服在轴承磨床上的应用

埃斯顿EDB、EDC交流伺服在轴承磨床上的应用z本文重点讨论埃斯顿EDB系列交流伺服在数控轴承磨床上的工程应用原理及伺服性能的详细分析。
z关键词:埃斯顿、伺服、数控轴承磨床近几年,随着中国成为世界工厂的趋势日益增强,国际国内对轴承这个最基础的机械支撑与运动元件需求与日俱增,海内外用户对轴承精度和使用寿命的要求也是越来越高。
作为轴承加工最关键的磨床,也随之在提高技术含量、提高效率、降低故障率、提高加工精度等方面有了更高的要求。
原先应用于磨床行业的机械传动、液压传动、步进电机正逐步被精度更高、更稳定的交流伺服所取代。
数控轴承磨床根据机床型号的不同,需要1-2台伺服电机分别控制工件进给和磨头进给两个轴,功率范围一般在750W—1.5Kw之间。
在轴承超精机上,交流伺服也正在逐步取代变频电机成为控制位置、速度的首选运动控制部件,伺服需求量更大,通常情况下一台超精机需要配备5-6套交流伺服,功率范围在200W-1KW之间。
举例:3MK144轴承磨床的控制原理参见图1。
图1数控轴承磨床控制原理行业背景本行业目前选用的伺服品牌大致有:日本安川∑Ⅱ系列、三菱J2S、J3系列以及埃斯顿EDB、EDC系列交流伺服。
数控轴承磨床对交流伺服的要求非常苛刻,100次连续加工重复定位精度误差≤2μm,轴承沟道磨削后的尺寸误差≤1μm,国内磨削加工工况比较恶劣,例如电压不稳、高温高湿、高污染等。
众多的客户在选用埃斯顿交流伺服之前一直选用日本的伺服系统。
由于进口产品价格很高,售后服务很难满足客户的要求,给客户的生产成本、机床信誉、服务质量增加了很多的麻烦和负担。
因此客户一直在寻找性价比更高的、服务更及时周到的国产伺服品牌。
埃斯顿伺服自2005年进入轴承磨床行业以来,以其高端的技术含量、稳定的品质、实惠的价格、快捷的交货及周到的售前、售中、售后服务赢得了客户的信任和赞许。
使用埃斯顿交流伺服的轴承磨床在最终用户那里经过长时间的带载加工,工件的形状公差精度、表面光洁度、重复加工误差率、加工效率等技术指标与使用进口伺服一致,得到最终用户的认可;埃斯顿公司在售后服务速度、质量和实事求是的态度也得到了最终用户的好评。
埃斯顿机器人 通用大负载系列 本体使用说明书

通用大负载系列本体使用说明书ESTUN机器人通用大负载系列本体使用说明书M-0104CN-10感谢您使用埃斯顿机器人产品。
在使用机器人之前,务必仔细阅读机器人安全使用须知,并在理解该内容的基础上使用机器人。
本公司致力于不断提升产品品质,本手册中与产品有关的规格和信息如有改动,恕不另行通知。
本手册中所有陈述、信息和建议均已经过慎重处理,但不保证完全正确。
本公司对于因使用本手册而造成的直接或间接损失不负任何责任。
用户必须对其应用任何产品负全部责任,须谨慎使用本手册及产品。
本手册所有内容的解释权属南京埃斯顿机器人工程有限公司。
本手册未对任何一方授权许可,不得以任何方式复制和拷贝其中的全部或部分内容。
版权所有:南京埃斯顿机器人工程有限公司产品服务热线:400-025-3336地址:南京市江宁经济开发区吉印大道1888号邮编:211102电话:************公司主页:电子邮箱:***************安全使用须知本章说明为安全使用机器人而需要遵守的内容。
在使用机器人之前,务必熟读并理解本章中所述内容。
使用埃斯顿机器人的公司、个人应该熟读所在地区、国家的标准和法律,并且安装适当的安全设施保护机器人的使用人员。
使用前(安装、运转、保养、检修),请务必熟读并全部掌握本说明书和其他附属资料,在熟知全部设备知识、安全知识及注意事项后再开始使用。
但是使用人员即使完全按照手册中给出的所有安全信息进行,埃斯顿公司也无法保证使用人员不会受到任何伤害。
使用人员的定义使用人员的定义如下所示。
•操作人员进行机器人的电源ON/OFF操作。
从操作面板启动机器人程序。
•程序人员进行机器人的操作。
在安全区域内进行机器人的示教等。
•维修人员进行机器人的操作。
在安全区域内进行机器人的示教等。
进行机器人的维护(修理、调整、更换)作业。
操作人员不能在安全区域内进行作业。
程序人员和维修人员可以在安全区域内进行作业。
在进行机器人的操作、编程、维护时,操作人员、程序人员、维修人员必须注意安全,至少应穿戴以下物品进行作业。