SVO_Fast Semi-Direct Monocular Visual Odometry
Visual Rules简要介绍

11/25/2019
杭州旗正信息技术有限公司
9
背景-当前软件开发现状
需求的不断变化是当前软件产业面临的最大挑战, 提高软件的“柔性”,让软件“随需而变”是当前 软件产业的一大趋势
业务逻辑以代码的形式写死在程序中,不能及时进 行变更
业务逻辑相互之间的调用关系写死在程序中,不能 随时进行调整
规则服务器
11/25/2019
杭州旗正信息技术有限公司
8
VisualRules可以用来做什么
对政策、策略等规则进行统一管理 对执行中的各类政策等规则进行统一监管 对各类政策的执行情况进行跟踪审计 可以随时快速的调整各类政策、策略等规则 可以结合工作流系统灵活调整业务流程 可以结合报表系统统计和查询各类数据和信息 可以结合SOA统一管理和共享各类规则服务 结合页面配置器可快速开发基于数据库的各类管理
3-8 9
10-18 19-21 22-24
25 26-28
11/25/2019
杭州旗正信息技术有限公司
3
VisualRules是什么
是国内唯一的专业的商业规则引擎 是商业规则管理系统的完整实现 已获得国家科技部创新基金支持 拥有完全的自主知识产权 已经发展成为基于web的快速开发平台 可应用于各类管理系统、工作流、报表系统、
作方式
面工具
与程序结合 利用JDBC或ODBC程序接口,发送SQL形 利用API接口,实现规则引擎的
的方式
式的语句与数据库交互
嵌入和与规则库的交互
11/25/2019
杭州旗正信息技术有限公司
12
业务规则管理系统
各种业务规则
编
(算法、流程、 应用 公式、政策、
VMD视觉营销课件

2)品类与品类之间的搭配性要强
3)配饰品的陈列要符合到日常生活规律
4)IP产品里面不要插入氛围元素
5)叠装比较能引发顾客的兴趣,所以切忌不要阻
止顾客打开
POP的类别
减价POP——文字要少 橱窗POP——要与模特所展示的商品相关联 重点推介POP—— 新品、滞销品 区域商品POP—— 展示该区域商品的风格 形象POP—— 展示品牌风格 价格POP
顾客的动线规律
1.由右到左 (以店铺的主通道方向为主) 2.喜欢直线 3.往宽的地方走
留住顾客的店内磁石点
1.入口处要大 2.让顾客走到店铺的最深处; (用灯光,色彩来引导顾客) 3.让顾客在卖场上停留的时间越长,机会就越多; (设计让顾客停留的点) 4.通过店铺磁石的设计,增加顾客的触摸率及试穿率;
形象的统一
空间设计 陈列展示 货品策划
店铺陈列调整及数据分析
分析 (VMD) 找出问题 提出解决方案 陈列设计 物料的准备 陈列方案的实施 陈列后效果的分析 陈列的调整
分析
货品:MD 订货会或上市前的货品分析 1)产品的设计思路、设计主题、产品风格设计思路
每个主题或系列的色彩配置、货品组合与搭配 2)公司产品订货明细(分区域、按系列、波段、色
1)与PP同系列的其它相关联产品,或互相搭配型商品的 展示,于顾客挑选时一目了然;
2)展示卖场中实际销售的商品,并讲实际销售商品进行 分类,整理;
3)体现商品类别、品质、码数,易于摆放,方便店员整 理商品,及时发现货品的遗失,同时也便于顾客进行挑 选;
IP的展示
方式:侧挂 、叠装
提示:1)必须叠整齐 挂整齐 摆整齐,井然有序的排列
明星30%的销售占比
令人眼前一亮 具潮流感 可吸引顾客进店 具特色 针对现有的顾客群,但又新意 在价钱、款式、颜色或其中一方
跨座式单轨交通高架换乘车站方案设计

收稿日期:20201215基金项目:中铁工程设计咨询集团有限公司科技开发课题(单轨-研2020-3-11)㊂作者简介:岳文豪(1991 ),男,2014年毕业于英国曼彻斯特大学建筑与城市化专业,文学硕士,工程师㊂文章编号:16727479(2021)03012806跨座式单轨交通高架换乘车站方案设计岳文豪(中铁工程设计咨询集团有限公司,北京㊀100055)㊀㊀摘㊀要:跨座式单轨是一种以高架敷设为主的中运量轨道交通制式,其换乘车站多采用高架形式设置在公共空间之中,对城市景观影响较大㊂为优化跨座式高架换乘车站的功能流线布置,减小车站体量,实现标准化㊁轻量化设计目标,从跨座式单轨制式独有的灵活度高㊁适应性强的特点出发,采用总结归纳法和案例分析法进行深入研究㊂首先,对跨座式高架换乘车站设计的影响因素进行分析,并对常用的高架车站换乘方式进行归纳;再结合近期项目实例,对同车站换乘车站及通道换乘车站的方案演变㊁优劣比选㊁适用范围进行研究,并对跨座式高架换乘车站的设计原则进行总结归纳㊂在统一设计原则的指导下,通过合理的车站站型选取以及因地制宜的周边分析,最大程度地实现了跨座式高架换乘车站的设计目标㊂关键词:跨座式单轨;高架换乘车站;同车站换乘;通道式换乘;方案研究中图分类号:TU248.1;U232㊀㊀文献标识码:ADOI:10.19630/ki.tdkc.202012150001开放科学(资源服务)标识码(OSID):Design of Elevated Transfer Station of Straddle MonorailYue Wenhao(China Railway Engineering Design and Consulting Group Co.,Ltd.,Beijing 100055,China)Abstract :The straddle monorail system is a medium volume rail transit system which mainly laid overhead.Its transfer stations are mostly set in the urban public space with an elevated mode,which has a great impact on the urban landscape.In order to optimize functional streamline,reduce station volume and achieve standardization and lightweight,the method of summary induction and case analysis were adopted based on thecharacteristics of straddle monorail system including high flexibility and strong adaptability.Firstly,theinfluence factors of straddle elevated transfer station were analyzed,and the commonly used transfer methods were summarized.Moreover,combined with project cases,the evolution,quality comparison,scopeapplication of the one-station transfer mode and channel transfer mode were studied,and the design principles of straddle elevated transfer station were summarized.Under the guidance of unified design principle,thedesign goal of straddle elevated transfer station can be achieved to the greatest extent through reasonableselection of station type and peripheral analysis according to local conditions.Key words :straddle monorail;elevated transfer station;one-station transfer;channel transfer;schematicdesign㊀1㊀研究背景及方法1.1㊀研究背景及意义换乘车站作为轨道交通线网各条线路的交汇节点,是轨道交通系统的重要组成部分㊂随着城市轨道交通的逐步发展,换乘站发挥的中转换乘作用愈发重要,目前各大轨道交通成网的城市,换乘站客流占全网的50%以上[1]㊂换乘车站往往位于城市重要节点位置,周边环境复杂,人流量大,控制因素多㊂尤其对于高架设置的换乘车站,其庞大的建筑体量会对城市空间和道路景观造成较大影响㊂如何在满足车站日常使用功能的同时,体现人性化设计理念[2],提升旅客换乘体验,并优化车站景观效果,是高架换乘车站设计中需要解决的主要矛盾㊂目前,关于轨道交通换乘车站的研究成果主要集中在传统钢轮钢轨制式领域,张丙昌对地下车站之间的换乘方案进行研究[3];陈小飞探讨了高架车站与地下车站之间的换乘关系[4];罗景华对高架车站与周边的建筑和环境的有效融合进行研究[5],刘宝对岛式与侧式车站换乘设计进行探讨[6]㊂然而,对于高架式换乘车站设计方案的系统性研究相对较少,亟待进行系统性总结㊂1.2㊀研究方法及目标在既有研究成果的基础上,从跨座式单轨制式的独有特点出发,结合近期的众多设计实践,以总结归纳和案例分析作为主要研究方法,对换乘车站的设置原则㊁制约因素㊁换乘方案㊁车站布局进行系统性研究,并对车站与城市空间的结合方式进行探索,以期达到跨座式换乘车站使用功能便捷化㊁车站体量轻量化㊁周边结合紧密化的设计目标[7-10]㊂2㊀高架换乘车站影响因素分析高架换乘车站设置于地面以上城市空间之中,其影响因素也有别于传统制式地下换乘车站,主要体现在如下几个方面㊂2.1㊀线位方案在工程设计中,轨道线路和换乘车站为 线 和点 的关系㊂根据线路交汇方案不同,车站可分为平行式和垂直式两种,具体布置形式如图1㊁图2所示㊂图1㊀双线平行式布置㊀图2㊀双线垂直式布置㊀当两线平行敷设时,两车站可在相同高度贴临或结合一体;当两线呈垂直交叉时,若线路存在高度跨越关系,两车站可分别独立设置于路口一侧,再通过换乘通道㊁连桥等形式连接㊂2.2㊀建设时序轨道交通工程建设投资大㊁周期长,普遍存在规划㊁建设分期实施的情况㊂对于建设时序不同的项目,应采取不同设计策略㊂同期建设的换乘车站,应优先考虑双线车站的一体化设计实施,从而最大程度方便旅客乘降及换乘㊂对于不能同期实施的换乘车站,在考虑换乘便捷性的基础上,需要结合分期建设的建设时序㊁投资分匹㊁接口预留等因素综合考虑,因地制宜地选择换乘方案㊂2.3㊀客流组织换乘车站多位于城市重要节点,周边客流规模较大,容易造成拥堵㊂在车站内,对旅客通行影响较大的站台宽度㊁换乘通道宽度㊁进出站闸机数量㊁扶梯数量等指标,应按照远期高峰小时最大客流量进行测算,以满足旅客使用需求㊂换乘车站内部各类人群相互汇集,在设计中应充分考虑不同类型人流走行路线的独立性,确保进出站流线,换乘流线,商业开发㊁工作人员流线均相互独立,以减少干扰㊂2.4㊀周边环境及规划换乘车站多数设置在城市核心区域,此类车站周边环境复杂,建筑密集,人流量大㊂车站设置应符合城市规划对周边地块的相关上位条件及指标,并满足车站与周边建筑的消防㊁节能㊁日照等相关距离要求㊂换乘车站设站方案应与市政道路和周边环境统一考虑,并着重考虑车站及天桥与人行道㊁车行道㊁周边建构筑物的相对关系,出入口应尽量靠近周边主要客流集散点,以减少旅客进出站走行距离㊂条件允许时,车站主体及出入口应与周边地块综合开发有机结合,为旅客带来便捷乘降体验,以及为周边区域注入活力㊂3㊀高架换乘车站的设计分类结合上文所述,高架换乘车站的受控因素存在多样性㊂在设计过程中,对于不同的及边界条件,也应采取相应的换乘方案设计策略[11-13]㊂根据划分标准不同,高架换乘车站的换乘方案主要分为如下几类㊂3.1㊀按照换乘部位分类按换乘部位分类,换乘方案分为非付费区换乘和付费区换乘两种㊂非付费区换乘多用于不同制式及票制的轨道交通之间换乘,在同制式轨道交通中,多采用付费区换乘的形式㊂付费区换乘又细分为站台换乘㊁站厅换乘和通道换乘㊂站台换乘最为便捷,站厅换乘次之,在两线同期实施并满足其他外部条件的情况下,应优先考虑站台㊁站厅相结合的换乘方式㊂通道式换乘设置灵活,适用于两线车站站位距离较远或分期建设的情况,当采用通道换乘时,应合理布置换乘线路,避免流线过长引起旅客通行不便㊂3.2㊀按照车站类型分类根据车站相对关系不同,高架换乘可分为同车站换乘和通道式换乘两大类㊂根据线路高差关系㊁换乘方式㊁车站布置的差异,又可细分为如图3所示多种类型㊂图3㊀换乘车站站型分类4㊀同车站换乘方案比选在两线同步实施,且周边环境及线路走向条件允许的情况下,应优先考虑双线并站的同车站换乘方案㊂车站合二为一能够最大程度方便乘客换乘,便于日常运营维护管理[14-15]㊂根据线路关系不同,该类车站又细分为一岛两侧车站㊁双岛车站和叠岛车站3种㊂4.1㊀一岛两侧车站当两条线路在同一高程,平行且不交叉敷设时,可采用一岛两侧车站形式㊂该站型设置1座岛式站台和2座侧式站台,站台下方设置共用站厅层㊂该站型换乘部位属于站厅与站台结合式,其中一个方向可实现同站台换乘,其他方向需通过站厅层进行换乘,剖面布置如图4所示㊂该站型多见于传统钢轮钢轨制式换乘车站设计中㊂主要优点为换乘流线较短,站厅集中设置,便于换乘㊁乘降和运营管理㊂车站两侧区间线路平顺无交叉,墩柱布置较为规整,景观效果较好,车站及两侧区间布置如图5所示㊂该方案不足之处在于车站宽度较大,需占用较多道路及路侧空间,且需根据市政道路宽度及线路敷设位置综合确定车站布局和柱位布置㊂图4㊀一岛两侧车站剖面示意㊀图5㊀一岛两侧车站鸟瞰示意㊀4.2㊀双岛车站当两条线路在同一高程,平行且局部交叉敷设时,可采用双岛车站形式㊂该站型同高程设置2座岛式站台,站台下设置共用站厅层㊂该站型换乘部位属于站厅与站台结合式,其中2个方向可实现同站台换乘,其他方向需通过站厅层进行换乘,剖面布置如图6所示㊂图6㊀双岛车站剖面示意㊀该站型换乘流线最短,乘客换乘与乘降最为便捷㊂然而,车站两侧区间线路存在交叉跨越,墩柱布置不规则,景观效果不佳;车站宽度相对较大且需占用较多道路及路侧空间(见图7)㊂4.3㊀叠岛车站当道路宽度条件受限时,可充分利用跨座式单轨爬坡性能优良的特点,将两条线路在不同高程敷设,此图7㊀双岛车站鸟瞰㊀时换乘车站采用叠岛车站形式㊂该站型上下设置2座岛式站台,站台下设置共用站厅层㊂该站型换乘部位属于站厅与站台结合式,其中2个方向可实现同站台换乘,其他方向需楼扶梯及站厅层进行换乘,其剖面布置如图8所示㊂图8㊀叠岛车站剖面示意㊀该站型能够有效减少车站宽度,占地面积较小,且换乘流线较短便于旅客乘降及换乘㊂然而由于站台上下布置,换乘流线与进出站流线相互交叉,容易造成楼扶梯处人流拥堵;且车站两侧区间在两个不同高程敷设,墩柱设置复杂,实施难度大,车站及区间效果如图9所示㊂图9㊀叠岛车站鸟瞰㊀5㊀通道式换乘车站方案比选虽然同车站换乘方案有诸多优点,但其受到外部条件制约因素较多,存在车站体量大,用地要求高㊁车站需同期实施等问题㊂当要求无法满足时,应考虑选择通道式换乘车站方案㊂通道式换乘车站的优点是两换乘车站相互独立,互不干扰,车站通过付费区换乘天桥进行连接,从而实现换乘功能㊂在建设过程中,可先期实施近期车站,并预留换乘通道接入条件,可有效减少工程投资和建设规模㊂根据线路关系不同,通道换乘车站分为双线平行通道换乘和双线垂直通道换乘两种类型,具体站型分类如下㊂5.1㊀双线平行式通道换乘双线平行式通道换乘车站主要适用于两条线路平行敷设的情况,根据两车站相对位置关系的差异,又分平行交错式通道换乘和平行并列式通道换乘㊂(1)平行交错式通道换乘车站该站型双线车站交错布置,通过端部换乘通道连接两车站付费区,从而实现站厅层换乘㊂平行交错式通道换乘车站常用于线路平行设置且道路条件较为狭窄的情况,可最大程度减少换乘站所占用的用地宽度㊂图10为淮南轨道交通淮南站,为1号线/4号线换乘站㊂该站所在位置市政道路狭窄,红线宽度仅35m,周边建筑拆迁困难㊂为最大程度压缩所占道路宽度,车站采用平行交错式通道换乘方案,在两站站厅层端部的付费区通过换乘通道相互连接,从而实现换乘功能,换乘距离仅为15m,平面布置如图11所示㊂图10㊀平行交错式通道换乘车站鸟瞰㊀图11㊀平行交错式通道换乘车站平面示意㊀(2)平行并列式通道换乘车站平行并列式通道换乘车站常用于线路平行设置且两线间距较大的情况㊂该站型两线车站并列布置,通过换乘通道将两车站站厅层付费区相连,从而实现站厅换乘㊂此种布置方式在保证两车站的相互独立性同时,又将换乘距离压缩至较短的范围内,如图12㊁图13所示㊂图12㊀平行并列式通道换乘车站鸟瞰㊀图13㊀平行并列式通道换乘车站平面示意5.2㊀双线垂直式通道换乘当线路交叉布置时,可采用双线垂直式通道换乘㊂为满足线路互相跨越时的高差要求,需将2个车站的轨道梁和站台设置在不同的高度上,根据车站相对位置及轨道梁高度不同,可细分为三㊁四层车站通道换乘;站厅站台上下交错式通道换乘;二㊁三层车站通道换乘等三种形式㊂(1)路中三㊁四层车站通道换乘跨座式单轨路中高架车站一般为三层布局,即架空层㊁站厅层及站台层,当两线路交叉时,可通过增加换乘层的方法抬升其中一座车站,从而满足线路的高差要求,形成三㊁四层车站通道换乘㊂以淮南轨道交通洞山路换乘站为例,2号线车站为路中高架三层站,由下至上为架空层㊁站厅层㊁站台层,1号线车站为路中高架四层站,由下至上分别为架空层㊁换乘层㊁站厅层㊁站台层㊂付费区换乘通道连接1号线换乘层和2号线站厅层,1号线换乘乘客需经站台下至换乘层后再经由换乘通道行至2号线站厅层,如图14㊁图15所示㊂图14㊀路中三㊁四层站通道换乘方案剖面㊀图15㊀三㊁四层站通道换乘方案㊀此换乘方案的换乘通道可实现无高差设置,换乘相对便捷,然而,换乘层的设置会导致车站体量增大,高度提高,投资也相应增加㊂(2)路中厅台交错式车站通道换乘当换乘车站设置在路中时,为避免车站高度过高,也可通过站厅层与站台层倒置的方法来满足线路高差要求,即站厅站台上下交错式通道换乘㊂仍以洞山路换乘站为例,1号线/2号线洞山路站均为路中高架三层车站,其中,1号线车站站厅层位于二层,站台层位于三层;2号线车站站台层位于二层,站厅层位于三层㊂两车站站厅层通过付费区换乘通道连接,通道高差为7m,具体布置如图16所示㊂图16㊀站厅站台上下交错式通道换乘方案剖面㊀该换乘方案两个车站建筑体量与标准站一致,建筑高度统一㊂但2号线车站站厅站台倒置,容易造成旅客流线迂回曲折,不利于日常使用及紧急疏散㊂且换乘通道存在高差需额外加设楼扶梯,会对乘客换乘带来不便㊂(3)二㊁三层车站通道换乘当通道换乘车站的其中一座有条件设置于路侧空地时,可采用二㊁三层通道换乘方案,并考虑与周边地块综合开发进行结合,在缩短换乘距离的同时为路侧地块引入活力㊂以德州轨道交通恒大站为例,1号线为路中高架三层站,3号车站为路侧高架二层站㊂两车站站厅层通过付费区换乘通道相连,从而实现换乘,剖面布置如图17所示㊂其中3号线车站与地块内的商业综合体结合设计,并设置连桥相连接,从而最大程度地提升地块的经济价值,周边开发效果如图18所示㊂图17㊀二㊁三层车站通道换乘方案剖面图18㊀二㊁三层车站通道换乘方案鸟瞰㊀6㊀结论跨座式单轨具有爬坡能力强,转弯半径小,车站体量小等特点,故跨座式高架换乘车站布置方案相较于传统钢轮钢轨制式有更高的灵活性和适应性㊂当换乘车站并站统一设置时,可结合周边城市空间和道路条件,灵活地选择一岛两侧㊁双岛或叠岛换乘方案㊂当换乘车站分站设置或分期实施时,应综合考虑上文所述限制因素及工程实际条件,选择最匹配的通道换乘方案㊂在跨座式高架换乘车站深化设计过程中,应遵循如下原则㊂(1)车站方案设计应着重考虑缩短旅客换乘走行距离,减少换乘高差,条件允许时应优先采用同车站换乘方式㊂(2)换乘旅客流线应与进㊁出站旅客流线分开设置,避免相互交叉干扰㊂(3)车站需分期实施时,应在满足近期车站使用需求及远期加建可实施性的基础上,尽量缩小近期建设规模和投资㊂(4)车站方案设计应与周边规划㊁市政道路紧密结合,合理确定出入口及换乘通道的布置㊂(5)条件允许情况下,应优先考虑将换乘车站与周边综合开发结合设置,为周边城市空间注入活力㊂参考文献[1]㊀罗小峰.枢纽型高架车站设计方案研究[J].智能建筑与智慧城市,2020(1):68-70.[2]㊀李玉书,孙越,万衡,等.城市轨道交通车站换乘通道客流压力的评估方法[J].城市轨道交通研究,2020,23(1):106-109,144.[3]㊀张丙昌.地铁车站换乘形式的设计研究[J].建材与装饰,2019(2):247-248.[4]㊀陈小飞.谈换乘方式之高架站与地下站换乘[J].设备管理与维修,2019(3):119-120.[5]㊀罗景华.高架车站建筑设计思路的研究[J].建筑技术开发,2020,47(9):15-16.[6]㊀刘宝,张小燕.岛式与侧式车站换乘建筑设计探讨[J].低碳世界,2018(2):272-273.[7]㊀赵薇.城市密集区多线换乘车站设计探索 轨道交通16号线龙阳路站设计回顾[J].建材与装饰,2019(18):219-220.[8]㊀于海.城轨高架换乘站建筑防火设计实例研究 以上海罗山路站为例[J].中外建筑,2018(10):167-168.[9]㊀苏珊山.建筑学设计审美在城市高架轨道交通建设中的应用[J].浙江建筑,2018,35(8):12-16,34.[10]余群涛.对轨道交通路中高架车站方案布置形式探索[J].建筑技术开发,2018,45(8):63-64.[11]许乙弘,李晓况.地铁车站换乘空间体验优化设计研究[J].城市轨道交通研究,2018,21(7):10-14.[12]皮雁南,郭建媛,马骁,等.城市轨道交通换乘车站多方式客流控制模型[J].都市快轨交通,2020,33(3):72-76,84.[13]张浩,尤建新.基于数据包络分析和托宾模型的城市轨道交通运输效率[J].同济大学学报(自然科学版),2018,46(9):1306-1311.[14]沈晓阳.重庆市跨坐式单轨交通的建设和运营[J].城市轨道交通研究,2006(10):8-13.[15]杨宏伟.铁路客运枢纽站各种交通方式的衔接研究[D].北京:北京交通大学,2005.。
频闪视觉训练在体育运动中的应用现状及发展趋势研究

第40卷第1期2021年2月福建体育科技Fujian Sports Science and TechnologyVol.40No.1February2021频闪视觉训练在体育运动中的应用现状及发展趋势研究张致玮,贾谊(中北大学体育学院,山西太原030051)摘要:频闪视觉训练是一种新型的训练形式,该训练模式由个体在间歇性视觉条件下进行训练,目的是在正常视觉条件下提高后续能力。
介绍了频闪视觉训练的相关原理,列举和说明了频闪视觉训练在体育运动中的应用现状和使用效果。
大量的研究表明频闪视觉训练对不同运动项目、不同领域、不同人群的好处,这对进一步推广频闪视觉训练具有重要意义。
最后,讨论了频闪视觉训练现有研究的不足和未来的发展趋势。
关键词:频闪视觉训练;运动;应用现状;发展趋势文章编号:1004-8790(2021)01-0043-04中图分类号:G808.12文献标识码:A Research on the Application Status and Development Trend of Stroboscopic Vision Training in SportsZHANG Zhi-wei,JIA Yi(School of Physical and Education,North University,Taiyuan030051,China)Abstract:Stroboscopic vision training is a new form of training,which is trained by individuals under intermittent vision condition to improve subsequent performance under normal vision condition.This paper introduces the relevant principles of stroboscopic vision training,enumerates and illustrates the application status and effect of stroboscopic vision training in sports.A large number of studies have shown the benefits of stroboscopic visual training for different sports,different fields and different populations,which is of great significance to further popularize stroboscopic visual training.Finally,the deficiencies of current studies and the future development trend of stroboscopic vision training are discussed.Keywords:stroboscopic vision training;movement;application status;development trend人类所获取的感官信息80%以上来自视觉。
高职院校跨境电商“微专业”构建研究与探索

高职院校跨境电商“微专业”构建研究与探索*秦艳丽,郭肃清(青岛滨海学院,山东青岛266555)2019年7月3日,国务院总理李克强在国务院常务会议中强调支持跨境电商等新业态发展,是适应产业革命新趋势、促进进出口稳中提质的重要举措。
近些年来,传统外贸增长放缓,以跨境电子商务为代表的新型商业模式在外贸发展中表现亮眼。
据数据显示,从全球范围看,2018年全球贸易增速仅3%左右,但跨境B2C 的年增长就超过了20%,据海关初步统计,2020年我国跨境电商进出口1.69万亿元,增长了31.1%。
其中,出口1.12万亿元,增长40.1%,进口0.57万亿元,增长16.5%。
与蓬勃发展的跨境电商相对应的却是当前跨境电商人才的极度匮乏,有相关报告指出“当前中国跨境电商人才对应的缺口约为450万,这一缺口正以30%以上的增长速度增加”。
作为培养人才的高校,跨境电商专业尚未获批,相关专业毕业生的专业知识与岗位需求脱节,人才培养速度和跨境市场发展速度错位较大,已经严重影响到行业的正常发展。
一、高职院校开设跨境电商“微专业”的重要意义(一)有助于提高高职院校人才培养质量在当今形势下传统外贸企业不得不顺势而为转型跨境电商,他们面临的一道门槛就是人才体系建立,市场上出现了大量的跨境电商培训机构,培训虽然比较快速,但效果并不好,加上缺乏相应部门的监管,培训名目乱象丛生,培训成本还特别昂贵;而另一方面因目前跨境电商在高校还未设独立的专业,高校毕业生尤其是国际贸易、电子商务、英语专业的学生,因其在学校培养模式单一,完全达不到跨境电商企业对复合型、实操型人才的需求,造成企业急需和毕业生难就业的矛盾局面。
在这种情况下,依托相关专业建立跨境电商“微专业”可以针对市场需求培养人才,从而提高高职院校人才培养质量。
(二)有助于高职毕业生更好地适应新的就业形势与本科生和研究生相比,高职院校的学生不仅仅在摘要:全球跨境电商蓬勃发展,成为全新的经济增长点,而跨境电商人才缺口巨大,已经严重影响行业的发展,作为培养应用型人才的高职院校责任重大。
视觉SLAM综述

通过基于光束平差法 ( Bundle Adjustment,BA) 的图优化理论估计相机的 位姿和地图点坐标,大大 提高了 SLAM 的精度。
目前,基于关键帧的VSLAM成为主流算法。最具代表性的有 两种: 一种是 LSD-SLAM [6] ,属于半稠密的单目的 VSLAM; 一 种是 ORB-SLAM [7,8] ,属于稀疏的 VSLAM。
3、稠密VSLAM
为了降低稠密地图的计算量,Engel J[12,13]提出了半稠 密地图(semi-direct visual odometry,SVO),通过结 合关键点的思想和直接配准的方法,大大降低了计算复 杂度。目前最先进的SVO就是Engel J等提出的LSDSLAM[13],已经能在CPU上实现了实时性。
什么是SLAM?
SLAM问题可以描述为: 机器人在未知环境中从一个未知 位置开始移动,在移动过程中根据位置估计和地图进行 自身定位,同时在自身定位的基础上建造增量式地图, 实现机器人的自主定位和导航。
(1)定位(localization):机器人必须知道自己在环境中位 置。 (2)建图(mapping):机器人必须记录环境中特征的位置 (如果知道自己的位置)
后端图优化流程
2.3 后端优化
2.4 建图
在经典的VSLAM模型中,所谓的建图,即找到所有路标 点,这些路标点的集合即是最终的地图,一旦确定了路 标点的位置,即可以说完成了建图。地图类型分为栅格 地图,拓扑地图,特征地图和混合地图。根据建图需求 不同,可以将建图用途分为两类:
定位:把地图下来,机器人下次开机后仍然能在地图上 定位,不需要再次建模,此类地图,稀疏地图即可完成。
1.2 地图的稠密程度
Enterprise自扩展纤维胶脑血管支架使用说明书
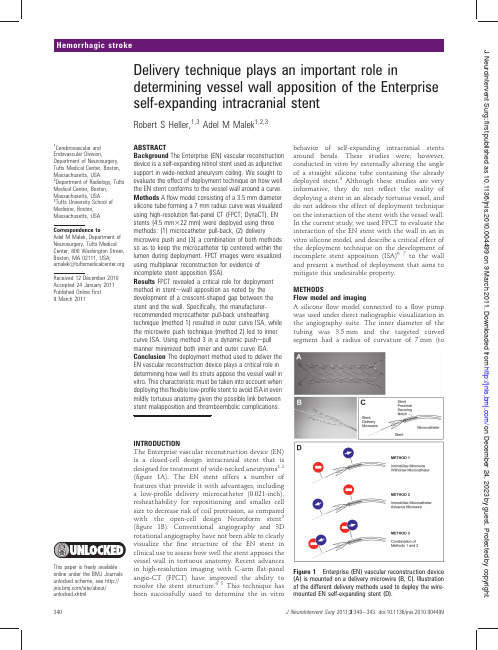
Delivery technique plays an important role indetermining vessel wall apposition of the Enterprise self-expanding intracranial stentRobert S Heller,1,3Adel M Malek 1,2,3ABSTRACTBackground The Enterprise (EN)vascular reconstruction device is a self-expanding nitinol stent used as adjunctive support in wide-necked aneurysm coiling.We sought to evaluate the effect of deployment technique on how well the EN stent conforms to the vessel wall around a curve.Methods A flow model consisting of a 3.5mm diameter silicone tube forming a 7mm radius curve was visualized using high-resolution flat-panel CT (FPCT;DynaCT).EN stents (4.5mm 322mm)were deployed using three methods:(1)microcatheter pull-back,(2)deliverymicrowire push and (3)a combination of both methods so as to keep the microcatheter tip centered within the lumen during deployment.FPCT images were visualized using multiplanar reconstruction for evidence of incomplete stent apposition (ISA).Results FPCT revealed a critical role for deployment method in stent e wall apposition as noted by the development of a crescent-shaped gap between the stent and the wall.Specifically,the manufacturer-recommended microcatheter pull-back unsheathing technique (method 1)resulted in outer curve ISA,while the microwire push technique (method 2)led to inner curve ing method 3in a dynamic push e pull manner minimized both inner and outer curve ISA.Conclusion The deployment method used to deliver the EN vascular reconstruction device plays a critical role in determining how well its struts appose the vessel wall in vitro.This characteristic must be taken into account when deploying this flexible low-profile stent to avoid ISA in even mildly tortuous anatomy given the possible link between stent malapposition and thromboembolic complications.INTRODUCTIONThe Enterprise vascular reconstruction device (EN)is a closed-cell design intracranial stent that is designed for treatment of wide-necked aneurysms 12(figure 1A).The EN stent offers a number of features that provide it with advantages,including a low-pro file delivery microcatheter (0.021-inch),resheathability for repositioning and smaller cell size to decrease risk of coil protrusion,as compared with the open-cell design Neuroform stent 3(figure 1B).Conventional angiography and 3D rotational angiography have not been able to clearly visualize the fine structure of the EN stent in clinical use to assess how well the stent apposes the vessel wall in tortuous anatomy.Recent advances in high-resolution imaging with C-arm flat-panel angio-CT (FPCT)have improved the ability to resolve the stent structure.45This technique has been successfully used to determine the in vitrobehavior of self-expanding intracranial stents around bends.These studies were,however,conducted in vitro by externally altering the angle of a straight silicone tube containing the already deployed stent.4Although these studies are very informative,they do not re flect the reality of deploying a stent in an already tortuous vessel,and do not address the effect of deployment technique on the interaction of the stent with the vessel wall.In the current study,we used FPCT to evaluate the interaction of the EN stent with the wall in an in vitro silicone model,and describe a critical effect of the deployment technique on the development of incomplete stent apposition (ISA)67to the wall and present a method of deployment that aims to mitigate this undesirable property.METHODSFlow model and imagingA silicone flow model connected to a flow pump was used under direct radiographic visualization in the angiography suite.The inner diameter of the tubing was 3.5mm and the targeted curved segment had a radius of curvature of 7mm(toFigure 1Enterprise (EN)vascular reconstruction device (A)is mounted on a delivery microwire (B,C).Illustration of the different delivery methods used to deploy the wire-mounted EN self-expanding stent (D).1Cerebrovascular and Endovascular Division,Department of Neurosurgery,Tufts Medical Center,Boston,Massachusetts,USA 2Department of Radiology,Tufts Medical Center,Boston,Massachusetts,USA 3Tufts University School of Medicine,Boston,Massachusetts,USA Correspondence toAdel M Malek,Department of Neurosurgery,Tufts Medical Center,800Washington Street,Boston,MA 02111,USA;Received 12December 2010Accepted 24January 2011Published Online First 9March2011This paper is freely available online under the BMJ Journals unlocked scheme,see /site/about/unlocked.xhtml on December 24, 2023 by guest. Protected by copyright./J NeuroIntervent Surg: first published as 10.1136/jnis.2010.004499 on 9 March 2011. Downloaded fromcenter of lumen).A calibratedflat-panel biplanar Artis digital subtraction angiography system(Siemens,Malvern,Pennsyl-vania,USA)was used for all procedures.3D FPCT was performed(DynaCT;Siemens)after the deployment procedure using all three deployment methods.Acquisitions were recon-structed and analyzed using the Leonardo software package (Siemens).The FPCT source images were visualized using multiplanar reconstruction and maximal intensity projection using Osirix software(64-bit version 3.8;Pixmeo,Bernex, Switzerland).Deployment methodA standard Envoy5-French guide catheter was used to advance a Prowler Plus Select0.021-inch microcatheter(Codman Neurovascular,Chelmsford,Massachusetts,USA)across the targeted tubing bend over a0.014Agility microwire(Codman). A4.5mm322mm EN stent was advanced underfluoroscopic guidance and centered over the target aneurysm.The stent was then initially deployed using the same technique of immobi-lizing the delivery microwire and unsheathing the stent by withdrawal of the delivery(Prowler Plus Select)microcatheter until theflared ends and distal5e6mm of the stent were in contact with the wall(figure1C).The rest of the deployment was then performed using three distinct methods(figure1D).In method1(microcatheter pull-back),the stent delivery micro-wire was kept immobilized and the rest of the stent was unsheathed by simple withdrawal of the microcatheter (figure1D,T op).Method1is recommended by the manufacturer in its instructions for use(‘If stent positioning is satisfactory, carefully retract the infusion catheter,while maintaining the position of the deliverywire,to allow the stent to deploy across the neck of the aneurysm.The stent will expand as it exits the infusion catheter.’).In method2(microwire push),the delivery microcatheter was immobilized and the stent delivery microwire was advanced to affect the remainder of the stent deployment (figure1D,Center).In method3(balanced push e pull), a combination of methods1and2was used to insure that the tip of the delivery microcatheter remained centered in the middle of the lumen during the entire delivery process (figure1D,Bottom).RESULTSHigh-resolution FPCT imaging revealed a critical role for EN stent deployment technique in its apposition to the tubing wall on the curved test site(figure2).Using the microcatheter pull-back technique(method1),the EN stent tended to follow theFigure2Sagittal thick(3.5mm,A,B,C)and thin(1mm,D,E,F)and axial thin(0.4mm,G,H, I)reconstructions of high-resolutionflat-panel CT in the same silicone model deployed using method1(microcatheter pull-back,A,D,G), method2(microwire push,B,E,H)and method3 (dynamic push e pull,C,F,I).Note gap between the stent struts and inner wall(arrow).on December 24, 2023 by guest. Protected by copyright./J NeuroIntervent Surg: first published as 10.1136/jnis.2010.004499 on 9 March 2011. Downloaded fromcontour of the inner vessel curve,with poor contact on the outer curve(figure2A,D,G).This resulted in the development of significant outer curve ISA,seen as a crescent-shaped gap between the stent and the wall of the tubing.Conversely,using the microwire push technique(method2)resulted in the EN stent following the outer contour of the curve during its deployment,with a consequent crimp on the inner curve and lack of apposition to the wall at that site(figure2B,E,H),leading to inner curve ISA.By examining the tip of the delivery microcatheter during deployment with methods1and2,it appeared that striving for a mid-luminal microcatheter position during the deployment process may alleviate or balance the tendencies of the stent to follow the outer or inner curve contours.Accordingly,the third technique of balanced push e pull is a combination of methods 1and2that aims to mitigate both inner and outer curve ISA. This is achieved by careful monitoring of the microcatheter tip, applying microwire push when the tip is too close to the wall of the inner curve,and conversely pulling back on the delivery microcatheter when the tip is noted to be getting close to the outer curve.This dynamic balancing technique is continued until the entire stent is delivered,resulting in optimized inner and outer curve apposition(figure2C,F,I).DISCUSSIONThis report is thefirst to highlight the critical importance of deployment technique in the performance of the EN self-expanding stent.Despite using the same relatively large radius curvature silicone model,which is less tortuous than a typical carotid siphon,deployment technique resulted in significantly different configurations of the EN stent with the tubing wall leading to the appearance of outer,or inner curve stent e wall malapposition(figure3).The study has limitations as well,in that silicone tubing does not faithfully reproduce the frictional coefficient or the stiffness of a native vessel wall,even though it is likely superior to a rigid glass tubing model.In addition,a methodical analysis of the dependence of stent apposition on deployment technique at decreasing curvature radius or using different EN stent lengths was not performed in the current analysis.4Because of it closed-cell design,it is possible that the EN stent may not be able to completely appose the vessel wall beyond a certain level of tight curvature,regardless of the deployment technique employed by the interventionalist.Rather,the purpose of the current study was to illustrate the phenomenon of deployment method dependence in a very mildly curved vessel,where the inherent closed-cell design property of the EN stent cannot be directlyimplicated as the only source of thefinding.There are a number of points of clinical relevance that can be derived from thefindings described here.First of all,ISA has been shown to be related to short-term and long-term thromboem-bolic complications as well as vessel thrombosis and occlusion in the coronary circulation.7These observations,however,were made in thicker-strut balloon-mounted coronary stents deployed in atherosclerotic vessels,and may not be applicable to the use of the thinner strut EN stent deployed in non-stenotic aneurysm-bearing vessels.Second,a number of reports have implicated the EN stent in early and delayed migration.89It is possible that lack of complete stent apposition to the wall may contribute to this phenomenon in two ways:(1)by decreasing the surface in contact with the vessel wall and making it more likely to migrate as a result of pulsation of the vessel wall(ratchet effect) or(2)by increasing the exposure of stent elements to the higher centralflow velocities,which may increase the stent surfacecross-section exposed to hemodynamic drag and lead to move-ment of the stent over time.The latter effect is unlikely tocontribute to the reported proximal migration,however,because any hemodynamic drag would tend to move the stent downstream.The third implication is related to subsequent navigationthrough the deployed stent under conventionalfluoroscopy.It isfeasible that an advancing microcatheter or microwire may inadvertently enter into the outer or inner region of ISA,whichis not visible under standardfluorography used in neuro-interventional procedures.This could thereby lead to entangle-ment between the microcatheter and the stent struts.Thecurrent study suggests the possible utility of FPCT imaging toevaluate the relative position of the advancing microwire or microcatheter with respect to the deployed EN stent and anyareas of inner or outer curveISA.Figure3Illustration of resulting incomplete stent apposition(ISA)patterns from deployment methods1e3.Microcatheter pull-back(method1)leads to the stent preferentially apposing the inner curveleading to outer curve ISA(A),while the microwire push(method2)leads to the stent apposing the outer curve resulting in inner curve ISA (B).Method3(C)aims to minimize both patterns of malapposition. on December 24, 2023 by guest. Protected by copyright./ J NeuroIntervent Surg: first published as 10.1136/jnis.2010.004499 on 9 March 2011. Downloaded fromIn conclusion,we have demonstrated that the method of deployment of the EN stent plays an important role in deter-mining the way that the stent apposes to the wall and its configuration.This technical dependence should be kept in mind when deploying the device around curved and tortuous vessels in order to minimize the phenomenon of stent crimping,ovalization,incomplete stent apposition,and their potential deleterious clinical impacts.Funding The senior author has received unrestricted research support from Boston Scientific and Codman Neurovascular.Competing interests The senior author(AMM)has received unrestricted research support from Codman Neurovascular and Boston Scientific for unrelated research. Provenance and peer review Not commissioned;externally peer reviewed.REFERENCES1.Higashida RT,Halbach VV,Dowd CF,et al.Initial clinical experience with a newself-expanding nitinol stent for the treatment of intracranial cerebral aneurysms:the Cordis Enterprise stent.AJNR Am J Neuroradiol2005;26:1751e6.2.Mocco J,Snyder KV,Albuquerque FC,et al.Treatment of intracranial aneurysms withthe Enterprise stent:a multicenter registry.J Neurosurg2009;110:35e9.3.Howington JU,Hanel RA,Harrigan MR,et al.The Neuroform stent,thefirstmicrocatheter-delivered stent for use in the intracranial circulation.Neurosurgery2004;54:2e5.4.Ebrahimi N,Claus B,Lee CY,et al.Stent conformity in curved vascular models withsimulated aneurysm necks usingflat-panel CT:an in vitro study.AJNR Am JNeuroradiol2007;28:823e9.5.Benndorf G,Claus B,Strother CM,et al.Increased cell opening and prolapse of strutsof a neuroform stent in curved vasculature:value of angiographic computedtomography:technical case report.Neurosurgery2006;58(4Suppl2):ONS e E380;discussion ONS-E380.6.Radu M,Jorgensen E,Kelbaek H,et al.Strut apposition after coronary stentimplantation visualised with optical coherence tomography.EuroIntervention2010;6:86e93.7.Rathore S,Terashima M,Habara M,et al.Incomplete stent apposition after coronarystent implantation:myth or reality?J Interv Cardiol2009;22:341e9.8.Kelly ME,Turner RDt,Moskowitz SI,et al.Delayed migration of a self-expandingintracranial microstent.AJNR Am J Neuroradiol2008;29:1959e60.vine SD,Meyers PM,Connolly ES,et al.Spontaneous delayed proximal migrationof Enterprise stent after staged treatment of wide-necked basilar aneurysm:technical case report.Neurosurgery2009;64:E1012;discussionE1012. on December 24, 2023 by guest. Protected by copyright./ J NeuroIntervent Surg: first published as 10.1136/jnis.2010.004499 on 9 March 2011. Downloaded from。
Visual Corporation Plus EWS Installer manual Versi

a CompanyVisual Corporation PlusEWSInstaller manualVersion 3.9Table of ContentsProduct details (3)SpecificationsTechnical characteristicsConnections (4)Readers (5)Standard readersBiometry readersDoors (6)Electric strike (Fail safe)Magnetic (fail open)Door sensors and Exit buttons (7)Programmable inputs (7)Communication (8)NetworkNativeTCP/RS485 ConverterMixed (10)Serial (10)RS485 Termination (11)Housing ABoard dimensions (12)Metal box (12)Mounting (12)Dimensions (13)Base front view (13)Base bottom view (13)Side view (14)Base 3D (14)Product details SpecificationsTechnical characteristicsConnectionsReadersStandard readersThe Reader can consume up to 400mA. Biometry readersThe Reader can consume up to 400mA.DoorsElectric strike (Fail safe)Magnetic (fail open)Door sensors and Exit buttonsProgrammable inputsCommunication NetworkNativeTCP/IP / RS485 convertorMixedIMPORTANT:One RS485 bus can connect 32 units (EWS and Readers with RS485). For more devices add more TCP converters or an RS485 repeaterSerialRS485 terminationFor proper communication over an RS485 network, the end points must be terminated with a 120 Ohm resistor.If the communication is not established and stable, use the external resistors provided in the hardware kit.The RS485 Communication Line must be made in a daisy chain, NOT in a star type.The cable must be twisted and shielded with a min. 0.5 mm2 cross section.Connect the ground (0V) of each unit in the RS 485 Line using a third wire in the same cable.The shield of the communication cable between two devices must be connected to the EARTH from ONE side of the RS 485 Line. Use the side that has earth connection to building grounding network. The Fingerprint Readers use the same RS 485 communication line. The Fingerprint Readers must also be put in the daisy chain. If stubs are used for the Fingerprint Readers, their length must not exceed 3m.On the EWS PCB, there is a 120 ohm resistor for termination. To use this termination resistor close the Jumper J3 on the first and last unit in the RS485 Line.IMPORTANT:One RS485 bus can connect 32 units (EWS and Readers with RS485). For more devices add more TCP converters or an RS485 repeaterHousing ABoard dimensionsMetal box MountingDimensionsBase front viewBase bottom viewSide viewBase 3D。
SVO原理解析

SVO原理解析最近空闲时间在研究Semi-Direct Monocular Visual Odometry(SVO)[1,2],觉得它值得写⼀写。
另外,SVO的运算量相对较⼩,我想在⼿机上尝试实现它。
关于SVO的介绍,有两篇博客介绍得⾮常好,因此我这⾥只简单提⼀下⼤概的思路,重点讲解了⼀下深度滤波器的原理。
姿态估计估计初始姿态利⽤相邻两帧之间的特征点对,计算相对位姿。
计算第k帧和第k−1帧中的特征点对的patch的灰度差。
特征点对指的是第k−1帧时深度已知的地图点(3D)在两帧中的投影点(2D)。
特征点patch是特征点周围4×4的区域。
利⽤Gauss-Newton迭代法求解ˆTk,k−1。
给k−1帧加⼀个⼩扰动δ,通过灰度差优化δ。
这步叫Inverse compositional formulation。
ˆTk,k−1←ˆTk,k−1⋅T(δ)−1这⼀步忽略patch的变形,不做warping。
因为相邻帧之间的形变很⼩。
Inverse compositional formulation保证Jacobian在迭代中保持不变,因此可以预先计算,降低计算量。
关于⽂章中导数的求解,请参考⾼博的,⾮常详细。
参考⽂献见[3]。
优化匹配关系利⽤初始位姿,寻找更多的地图点(3D)到当前帧投影点(2D)的对应关系。
对每个当前帧能观察到的地图点p(已经收敛的深度估计),找到观察p⾓度最⼩的关键帧r上的对应点u i,优化得到p在当前帧上的投影u′i。
优化的⽬标函数是仿射变换下的灰度差。
u′i=arg minu′i12∥Ik(u′i)−A i I r(u i)∥2∀i这⼀步中的patch采⽤的是8×8邻域,A i表⽰⼀个仿射变换。
这步不考虑极线约束,因为此时的位姿还是不准确的。
第⼆步和第三步需要⼀定量的地图点,不能在⼀开始就使⽤,猜测这是作者强调深度估计收敛快的原因之⼀。
BA优化利⽤第⼆步建⽴起的(p i,u i)的对应关系,优化世界坐标系下的位姿T k,w,标准motion only bundle adjustment。
国际商务

服务和全球价值链-----关于制造业和服务网站的一些证据摘要:这篇文章通过全球价值链分析了服务在国际贸易中的角色。
服务占世界GDP的70%以上,但只有约20%的世界贸易能够收支平衡。
在增值税方面,会计服务主要体现在出口方面,服务占世界贸易的40%。
然而,国际服务不仅是通过跨境交易体现的。
服务也可通过劳动和资本表现出来,后者会为本国的GDP 做出很大贡献。
外国子公司的服务附加值在选定的欧盟国家,平均每四分之一就能实现增值服务。
服务作为一个角色进入到生产,通常被认为是制造业生产,大量与服务业相关的制造业占发达国家与发展中国家的三分之一。
虽然外国服务内容在制造业出口的份额已接近12%,在发达国家和发展中国家,后者增加显著减少国内服务价值制造业出口。
服务业越来越多的出现在网络或者其他一些小的的部门。
基于贸易增加值统计和电影行业的案例,本文列出了相关的概念和测量问题的服务网络和提供证据研究。
与产业价值链形成鲜明对比的是,基于贸易增加值统计和调查证据国际服务网络看上去不那么分散。
然而,为了更好的捕捉国际服务的问题,最好是能够了解企业的一些特点,例如,把劳动和资本的运动也考虑在内。
关键词:贸易附加值;全球价值链;服务网络;贸易服务1、简介服务以不同的方式出现在产品的生产周期,他们可以投入到商品的生产或者是输出到网络生产系统。
“现代服务可以像商品一样分类定价,他们可以通过卫星和电子运输国际电信网络”。
本文的主题是,在不同的生产环境提出服务的目的。
首先,正如“推动者”有助于制造业生产服务。
怎么样估计这个统计?服务生产过程有多么重要?第三节利用附加值贸易统计数据显示,制造业的servicification可观,特别是在发达国家,服务业占了大约三分之一的制造业出口。
相反,发展中国家的服务业不太显著关键在于本国的对服务业的疏忽。
第三部分继续使用传统的贸易统计评估,向包括印度和菲律宾这样的国家,服务外包使其增强出口竞争力。
唯智信息技术(上海)股份有限公司:唯智准时达物流信息系统项目(iDEAS)

一、应用企业简况(包括企业所属行业、规模、所有制类型等),企业管理模式与营销模式的主要特点(1)关于唯智信息唯智信息技术(上海)股份有限公司创立于2001年,是国内首屈一指的集私有云和公有云于一身,提供智能和移动互联供应链全面解决方案的领导品牌。
唯智成立于2001年,总部于上海,注册于张江软件园,目前是中国成立最早、规模最大的致力于物流信息服务的中外合资企业。
中国物流软件市场占有率排名第一,在业内享有极高的声誉,于2016年在中国新三板上市,股票代码837981。
唯智信息旗舰产品主要包括:OMS(订单管理系统)、WMS(仓储管理系统)、TMS(运输管理系统)、LFCS(物流财务控制系统)、ROS(配送路径优化系统)以及56Linked(物流链云平台)。
唯智信息专注于中国市场,服务于每一个行业排名第一的大型企业客户,主要包括:上汽通用汽车、中国铁物、海尔物流、世能达、沃尔玛、联合利华、达能饮料、农夫山泉、东方购物、中国移动、中国烟草、富士康、中国外运、中车集团、歌尔声学、海信电器、中国医药等。
唯智信息凭借丰富的行业经验和专业的IT技术自主研发能力,以最优质的服务助力制造、零售、快消、医药、电商、冷链、汽车、3PL等十大行业1000等多家企业客户通过信息化手段提升物流管理效率、节约成本,为全面提高企业核心竞争力创造价值。
(2)关于客户准时达JUSDA准时达,富士康科技集团供应链管理服务平台。
作为一家中外合资企业,准时达主要从事与国内交通运输相关的货运代理及仓储服务等业务,是全球C2C(Component to Consumer)供应链整合服务先行者,致力于运用先进的科技研发实力,成为以科技驱动的专业供应链管理服务平台。
准时达拥有专业的全球供应链管理经验,大中华区网络辐射华南、华中、华北、华东、西南5大区域,在全球拥有60个仓储配送中心,200万平方米仓储场地,海外110个跨境转拨运营中心,国际海陆空铁运线路1000多条。
VisuNet产品多媒体介绍的录音整理
VisualNet产品多媒体介绍的录音整理√一、首页在介绍VisualNet之前,我们先来简单了解一下VisualNet的概况:VisualNet从1994年推出第一版,主要用于通信设备与线路的管理.2003年之前由北京与香港的两家公司负责大陆与东南亚地区的销售代理,2004年起开始汉化并成立现在的公司负责销售与服务.到目前为止,在ZDNet、新浪、搜狐等专业网站或门户网站上的合计下载量已超过了百万人次.全球有1200多家设备厂商为我们提供图库模板,目前各种类型的图库总量已经接近10万个,还与国内750多家企事业单位建立各种合作关系.连续多年在通信、电力、广电、金融、军队、政府机关等行业中的应用独占鳌头.在高等院校、职业技术学院或第三方的培训机构进行专门的课程设计与教学,发表了以VisualNet为平台进行设计管理或开发应用的文章近百篇.包括今天来的很多同志,我看了一下名单,也都来自各行各业,而且做的管理应用也不尽相同.刚才有个单位的信息主管说了:“他是4年前在做科员的时候就已经开始用VisualNet 了,只是因为各种原因当时没买成,现在自己做了科长了,还是念念不忘VisualNet要订购几套使用.”,有个工程师说:“我第一次见到VisualNet以后,就有一种百年一遇的强烈感受”,坐在最前面的有个做系统集成的工程师也说了:“我们公司现在一半的业务就是靠VisualNet平台来支撑的.”我相信很多人都有这样一个疑问:为什么VisualNet使用的范围这么广、用的人这么多,是什么原因受到大家的欢迎呢想要了解这一点,我们就需要先从两个现象谈起:√二、了解系统研发背景:第一种现象:大家先来看这样一张图:很多人已经发出惊呼声:这太恐怖了呵呵,是太恐怖了.我相信大家脑子会想了:这是哪里的机房呀要是出现故障怎么去寻找啊这些线是连到什么地方去的呀要是线路断了,会影响哪些设备啊等等问题.·也许有人会说了,我们设备管理的很规范、也很整洁,就像下面图上所看到的:同样,也有人问了:这是什么设备呀是干嘛用的呀是什么公司生产的呀刚才还有一个工程师说了:这是我们机房的照片,我知道是什么设备,但是里面配置信息是什么我得去看看word文档;有没有闲置的设备我也不太清楚,需要查一下上个月的报表;是否有故障设备我还不太清楚.针对这些情况,我们可以发现,不管你是熟悉或是不熟悉这个环境:在我们对含有各种设备、线路资源进行设计、施工或管理维护时,都会或多或少遇到以上类似的问题,即这些系统中存在着大量的设备节点和节点间复杂的连接关系,既难于理解又不便管理.譬如像前面说的:这个设备是什么怎么配置的怎样连接的与谁连接的从首端到末端要经过哪些中间接点和线路这个设备何时投入运行的哪些设备需要更新维护管理人员走了以后如何能让资料完整地保存下来新接手的员工如何能快速掌握这些系统等等问题.....虽然我们可能每天都在和这些成百上千的设备、数据信息打交道,但是我们却很难对这些复杂系统中设备配置、连接关系、技术参数、使用状态、资产信息做到了如指掌.很难找到一条有效的途径来管理这些日益复杂和离散的系统.也许很多管理人员已经意识到了这个问题,于是可能会想到要用画图工具去制图,如CAD、Visio等,但大家都有体会的是,纯粹的画图软件,我们很难把众多的设备信息、连接关系信息表达清楚,不同的设计图纸之间也没有直观的连接关系能够表达出来.一旦出现故障需要维护的时候,我们就需要翻前翻后地忙着查阅各种图纸、文档.即使有些单位用一些信息管理系统来管理这些设备信息、技术资料,可是我们发现,表格式的数据管理系统很难清楚地表达出系统的复杂结构和连接关系.就是一些花巨资用GIS系统去管理的单位,也已经充分意识到,光是管理设备的地理信息数据也是远远不够的,还有众多的技术文档、设备的细节等都无法通过一个设计页面表达出来.因此,无论您目前使用哪一种方式去设计或管理系统,都会觉得这些方法存在明显的缺陷.如果我们仔细分析一下原因,其实很简单:因为即使看是一个很简单的图纸,里面的每一个对象都有其自身的数据属性、技术参数和具体的业务特征,同时它又和系统中的其它对象发生关联.而常见的静态图表软件已经不可能把这些关系、属性和业务特征一一反映出来,更不能做到图形与实物的一一对应.另外,我们经常为了计算、统计、或维护的需要,还要使用各种数据库工具、文字处理系统以及第三方监控检测系统.大量工具的使用,造成了管理维护的效率低下、协调困难、错误频发等问题.以上这些是我们经常能看到或体会到的第一种现象,就是非专业系统所管理的低效率.第二种现象,就是用比较专业的软件来管理.√三、了解常规系统的开发更新过程有人说了:我们现在也改变观念了,单位里专门请人开发了专用的管理系统.譬如,有些单位实施了通信资源管理系统、有些单位开发了光缆管理系统、有些购买了电力设备管理系统等等.各行各业都有各自的专业软件.接下来我们想让大家了解一下这些专门开发或定制的专业管理系统,怎么也会出现问题的,先看看它们的开发更新过程是怎样的第一种情况,就是在初次研发阶段:这些专用软件在第一次开发时,软件公司需要去用户那里,针对具体的需求,进行必要的调研、结构设计、代码编写、安装调试、上线运行等过程.当满足用户的需求时,就可以完成交接.第二种情况,是软件公司把开发过的软件向其他用户推荐的时候,也就是开发商进一步进行市场拓展的时候,我们经常听到一个词,叫“定制”.之所以要求定制,就是因为当前这个用户的软件需求和开发商提供的软件在功能有差异,所以需求更改.同样当定制后的系统满足所提出的定制要求时,就OK通过了.第三种情况是:用户在使用这些软件一段时间后,因各种情况的变化,造成当前的功能已经无法满足现有需求,因此就需要软件公司去“更新”软件.而当这些功能过了一段时间以后,新的变化又出来了,那么用户还得继续要求软件公司去更新.这个更新过程往往是没有终点的,因为无论是用户自己还是软件开发公司,都不可能预测将来发生什么样的需求变化,而为此提前做好各种更新准备,因此更新过程往往是周而复始.√四、常规开发设计过程中的问题仔细研究一下这些过程,我们可以发现:无论是用户首次提出功能要求,还是以后提出更新需求,都必须借助于软件公司或者软件开发人员去做这个事情.那么我们要谈的第二种现象中的问题就出现了,我们经常会听到开发人员说:A、我们的开发工具、应用环境已经变了,原来的程序已无法直接修改,必须重新开发.B、或者说:更新这个功能,需要的时间比较长,我们无法很快满足你的要求.C、或者说:更新这个功能可以,但是需要另外支付费用.D、还有的说:可以更新程序,但是原来的数据可能需要迁移或重新录入.除此之外,可能还有更可怕的事情是,找不到这家开发公司或开发人员了,即使你愿意掏钱,也没法去更新这个系统了这种借助于第三方来满足经常变化着的需求方式,给用户带来了大量的不可控的、不可预知的变数,让用户始终处于一种被动状态中.这就是我们想要说的第二种现象.针对这两种现象,我们现在可能有些困惑了:一方面,我们确实需要管理复杂的系统,但是常规的方式远远无法满足我们的要求;另外一方面,专业定制的软件确实存在着很多可变因素,对我们的管理造成潜在威胁或各种被动局面的发生.怎么样才能解决好这些问题呢√五、解决的办法是什么呢有人说了,如果这些系统全部由我们用户自己去编写程序,去开发设计就好了这里其实也面临着一些很相似的问题:首先你自己当然有编写程序的经验,并且能保证开发出的系统是可靠的、稳定的.其次,即使你或者你的同事能开发出了这样一套专业系统,但是同样的,你不可预知将来的需求会不会发生变化会发生什么样的变化是不是每次需求变化时,你都亲自去更改代码或者数据结构即使你能去改,是否有时间去做等等问题.很显然,这种方式对绝大多数的最终用户来说是行不通的.那么有没有既能帮助我们实现复杂的系统管理,又能够让我们在面对新的需求或新的变化时,即使一点也不懂地编程,也不需要借助于软件开发人员,我们最终用户自己也能随时去解决这些需求变化的方法呢我们说:有那就是用VisualNet早在1994年,我们就在业界最早提出了“可视化的资源管理”这一设计管理理念,即Visual Resource Management-简称VRM,并根据这一理念,开发出了VisualNet平台.下面就让我们一起看看VisualNet是怎么实现的吧√六、VisualNet采取什么措施和解决方案首先,VisualNet把我们常见的管理要素进行分类:第一类是实体对象,也就是我们平时能看得见、摸得着的物体.如:设备、管道、线路等.第二类是逻辑对象,如各种逻辑结构、设计思路、概念、理念等.第三种是关系对象,如上下级之间的关系、父子关系、关联关系、连接关系等.第四种是数据对象,就是我们平时关心的数据信息、配置信息、技术参数等.第五种是文档对象,譬如如各种纸质的或电子格式的报告、图片、声音等.第六种是事件对象,譬如访问一个网站、执行一个命令、发送一个邮件、下载一个驱动程序等等.其次,在分类完成后,VisualNet把这些对象进行封装,变成模块,也就是我们在系统中所使用的各种各样的图库模板.接着,VisualNet为用户提供一个个性化的设计平台.因为我们知道,即使是同一类对象,他们也是有各自特性的.譬如四个轮子是汽车的共同特征,但是每辆汽车可能又有各自的颜色外观、各自的配置.如果是同一型号计算机的话,它们可能也有各自的用户账号、登陆密码、IP地址等个性信息.因此VisualNet提供了一个个性化的设计环境.最后,VisualNet还为用户提供了一个层次化的管理模式.因为有些管理对象在当前时段所提供的信息可能已经满足管理需求了,但是过了一段时间以后,可能需要更加细化的设计信息来管理.因此层次化管理模式的提出,可以帮助用户随时做更深入细致的管理,即使这个系统相当复杂也没问题.√七、VisualNet是什么VisualNet到底是什么呢有些刚接触VisualNet的用户说,VisualNet可以设计出各种直观、形象的图纸出来,它是不是个制图软件呀那我说,你只说对了一部分,说明你对VisualNet的认识目前还在10%.我们都知道,常规的一个软件管理系统的开发需要经历:需求调研、数据结构设计、代码编写、安装调试、上线运行等过程,就像下图所示的那样:而在VisualNet中,您不再需要经历上述的开发设计过程或更新过程,用户自己只需把图纸画出来、把数据录入到系统中,也就是项目数据的初始化,就完成了系统的实施作为软件开发公司或中间服务商来说,您可以免去了程序开发调试这一个漫长的过程.作为最终用户来说,您无需担心在自己的需求发生变化时,再去找开发人员去更改代码或修改数据结构了,所以我们把VisualNet称之为一个:资源管理系统的开发平台.√八、VisualNet的四个重要特征它有哪些特征呢:1.VisualNet所设计的每一个应用系统,都是采用容易理解的图形方式,来管理各种数据信息、设备对象及相互之间的复杂的连接关系,并通过创建一个逼真的、“虚拟现实”的项目,来管理各种应用.2.系统采用由总到分、由粗到细的层次化管理模式,用户随时可以根据需要进行更加的细化的设计与管理,这样可以便于建立各种复杂的应用系统.3.系统中每个图形对象均可被搜索、查询、统计、定位;你可在任意位置搜索整条链路上所有起始端、末端、中间位置的设备与线路、节点,并闪烁指示.4.VisualNet已经搭建了好了资源管理系统框架.系统使用者可以针对不同的项目需求,通过自定义模板库、定制属性字段,就能快速设计出各种资源管理平台,所以它具有强大的系统扩展性、伸缩性和灵活性.那么,接下来我们来看看,VisualNet为我们提供了哪些功能……√九、先了解一下VisualNet的系统架构整个系统分成四大块:第一块是VisualNet客户设计端:它负责项目的创建与修改.第二块是WebServer服务器端:负责平台的配置、账号管理、权限分配、流程控制等.第三块是项目处理器:负责各种项目数据的集成以及解析成Web页面.第四块是浏览器端:如下图所示,设计端完成一个项目的设计或修改后,上传到中间那一块的服务器端平台,然后用户通过IE浏览器,根据自己相应的权限,进行项目的访问.譬如访问项目A 、查询项目B、浏览项目C等等.另外系统还提供了VisualNet阅读版,这有点类似于PDF阅读程序,可以直接用它来在本机上打开项目数据,进行查询、浏览、链路分析、统计等,只不过是没有修改权.VisualNet的网络版还有一个不同于国内常见的网络版软件的特点:即国内的大部分网络版专业软件,其客户端在脱离服务器端平台后就不能独立运行.而VisualNet客户端可以在您脱离Webserver服务器的情况下,一样可以进行项目的设计与修改.这种架构模式的创新给您带来以下几个便利:第一,如果施工现场或抢修现场,无法连接到单位网络或广域网的情况.那么,您可以通过在手提电脑上安装VisualNet客户端或阅读版,然后把项目数据复制到本机上,在脱机的情况下,就可以在现场进行项目的设计、修改、查询或检查验收.第二,在设计修改项目时,可能地点经常有所变化,譬如有时需要在办公室进行管理,有时需要在家里进行设计修改,那么这种架构就不会限制你的工作流动.第三,在服务器需要维护停机时,客户端可以独立运行,不受影响.这种架构模式一经实施,就受到了国内用户的广泛欢迎.另外,在采用单机版还是网络版的选择方面,我们也顺便给您提供一些建议:1、如果您平时设计修改的人只有一个或两个,查询资料的人也很少,那么您可以考虑采用单机版本.2、如果您设计修改的人有两个以上,同时又有很多人需要进行查询信息或通过浏览器去访问,还需要通过权限分配与流程控制进行管理,那么您就要考虑采用网络版.从性价比来说,网络版当然是优先考虑的,同时它也没有查询端数量的限制.如果您需要从成本方面考虑,那么你可以先使用单机版,在合适的时候再补订服务器端的软件就可以了,这样您就能尽早使用上VisualNet了.√十、VisualNet的功能模块接下来我们对VisualNet的几个关键功能进行案例演示:1、图形化拖放式设计系统提供了全球1200多家近10万个专业设备模板库,通过便捷的模块拖拉操作,就能快速搭建出专业的系统.当图库模板更新时,所有设计的图纸中设备线路也自动更新,无需人工干预.2、层次化的项目管理方式实现从广域网到局域网的管理:区域-建筑-楼层-房间-机柜-机架-设备-模板-端口-元器件3、图形与数据的无缝集成图形外观、属性字段都可自定义,能够任意增加、修改或删除对象的属性信息、相互之间关系和业务数据,使图形具备智能性,同时也让系统具备了强大的扩展性.4、便捷的批量数据录入功能系统提供“字段默认值”、“列表值选择”、“批量属性值复制与粘贴”、“批量命名”、“导入外部数据源”等众多方式,来解决系统大批量数据输入的难题,是其它系统没法实现的一个强悍功能.5、数据的同步更新无论您在设计图状态输入数据还是在表格方式下修改数据,所有页面上相关对象的数据更新都是同步发生、一次完成,无需您到各个页面修改.当图库更新时,每个页面上该类型的设备图也会自动更新,无需手工去修改原来的设计图.6、强大的搜索定位功能用户可以自己配置各种属性字段进行搜索查询,无其它常规资源管理系统开发时把数据字段“写死”在程序中的”硬伤“您还可直接双击查询结果,直接打开该对象所处的图层并闪烁指示其位置.7、丰富的双击事件功能节点、线缆或属性字段都可具备双击事件功能,可帮助您创建子页面、访问细节页面、打开相关电子文档、访问网站、下载驱动、运行第三方监控检测程序、执行系统命令等,把更多的资源集成到一个人机界面去执行.8、智能化的路由分析能跟踪任意设备间的连接关系,帮助您透彻了解设备链路. 论您在哪个页面上,点击任意一根线缆或设备终端,即能把整条链路上所有连接的设备或端口指示出来.9、故障覆盖分析与控制点分析快速搜寻网络故障点和关键控制点,减小故障影响的范围,同时可以自己输入解决方案,为将来同类问题的维护提供专家辅助信息.10、任意图层设备资产统计与报表输出可按区域、楼层、部门、房间、机柜进行统计,多种数据输出格式.还能输出Access 数据库,供您自定义报表.11、跨图层间连接与复合视图不同的页面之间可以直接创建连接线路.用户还可以把不同设计页面组合在一起,建立系统总图,便于您从更高角度掌握网络结构12、多视图分析管理图形设计视图---可以直观清晰地了解系统结构、位置、关系;连接关系视图---可以直接查看设备的链路、路由、连接对象;电子表格视图---可以快速掌握设备类型、数量、属性13、可视代理用户可自定义属性字段值与图形外观的对应关系,当数据值发生变化时,系统会自动以不同的颜色、线条粗细、闪烁、告警等方式提示信息的变化.14、细节预览器无论是在统计报表、查询报表中,您都能快速定位当前对象的位置.快捷地显示子图、线路连接图、目标位置图.15、Web 发布与文档共享系统既可以通过项目打包方式把相关文件集中分发到客户端,并通过VisualNet阅读版在本机上浏览查询.也可以通过Web发布方式,把项目文档分发到局域网或广域网,实现图形结构、数据信息的远程共享.16、与第三方数据的集成您可以通过与外部数据源如:SQL、Access等建立连接关系,把已有的数据资源集成到指定的图形对象中,让图形具备更多的数据属性,保护你原有的投资.在我们初步了解了VisualNet的功能后,我们再来把它和其它的软件进行一下比较,了解一下它们之间相互的差异:√十一、和其它软件的比较A、和常见的制图软件的比较譬如CAD、Visio等,这类软件应用定位就是制图.而VisualNet的目标是通过形象化的图形方式来进行各种信息的管理,制图功能仅仅是其中的一个子项.另外,即使大家都拥有制图能力,但是CAD、Visio的制图方便性、图库模板的数量也跟VisualNet有较大差距.B、和GIS系统的比较现在有相当多的GIS老用户或者原来打算用GIS系统去实施的用户,纷纷抛弃了GIS平台,而纷纷转向用VisualNet.两者之间到底是什么样的差异让GIS用户改变了观念呢为此我想在这里多做一些介绍.GIS,也就是我们平时所说的地理信息系统,其主要特点是管理经度、纬度比较精确,是以地图为背景,在上面进行对象的布局管理.在实施一个GIS系统时,用户往往把大量的精力放在了地图数据上,而更需要关注的设备技术细节、连接关系、配置信息等实际需求确被弱化了.下面从4个方面来做一下比较:第一,从投资成本方面来说:采用GIS系统的用户,在初次购买地图数据时,其成本相当高.后期如果想要更新系统,就又得花费大量资金去更新.用户其实把大量的投资都沉淀在了地图数据上,而不是真正需要的功能上.如果不去更新地图数据的话,就会造成实际的管理环境与系统数据不一致,时间一长,就变成了我们常说的“死系统”.而采用VisualNet平台的用户就没有这个担忧,其地图数据来源很广、价格很便宜甚至是零成本.譬如可以从网上下免费载Google地图或者GIS地图、CAD地图,甚至可以从书店购买最新的纸质地图进行扫描,然后直接应用到系统中即可,既方便又便宜,而且随时可以去更新.第二,从实施周期来说:实施一套GIS系统,短则数月长则一年.如果系统是从头至尾开发的话,则可能周期会更长.即使系统好不容易上线运行了,里面的功能是否还需要做更新更改的周期有多长也都是个未知数.如果再加上GIS系统的数据初始化这个过程,那时间就更长了.而VisualNet却至少能够缩短GIS系统80%的实施时间,因为VisualNet本身已经搭建好了一个资源管理平台,省去了常规系统的开发调试过程,无论是最终用户还是中间商,您只需为一个项目进行数据的初始化录入,就完成了实施,大大提高了工作效率.如果需要更新数据或属性的话,也是即改即显,立刻能完成.所以从实施周期来说,这也是GIS系统所无法比拟的.第三,从功能方面来说:VisualNet采用了易于理解的数据图形化的管理模式,系统通过逼真的图形来管理各种设备、链路等各种信息;采用拖、拉、放的方式进行快速设计修改;采用层次化的管理模式来管理各种复杂的系统结构;采用智能化的链路分析功能来进行设备线路的分析、定位.这些强大的功能,能够帮助每个使用者都能快速实施或者掌握一套系统.VisualNet的设计理念是:让用户专注于具体的项目需求上,而不是地理数据的处理方面.而GIS系统却恰恰相反,它把主次关系颠倒了.从实际应用角度来说,GIS系统中的经度、纬度只是为我们管理这些信息提供一个辅助条件,而不是必要条件.另外GIS系统的狭隘性还表现在,对地域范围较小的对象进行管理的功能很弱,譬如同一栋楼的设备、同一机房内的设备,因为这些被管理对象的经纬度值都很接近甚至相同,GIS系统就根本无法很好地实现细节性的管理.即使有些系统也想借助其他方式去管理,它的便捷性也是无法和VisualNet相比的.第四,从更新维护角度来说:VisualNet为用户提供了一个开放性的平台,使用者根据需要,随时可进行模板的修改和属性的配置,然后设计、更新出各种各样的应用系统来.举个例子,如果我们用GIS平台去做通信资源的管理系统,里面除了要管理常规的光缆、电缆、通信设备外,常常还需要管理供电电源、蓄电池、配电屏甚至空调等.而不同的场合,需要管理的对象又不可能完全相同或.系统无法预先做好各种假定.这就要求管理平台有很好的伸缩性.而。
威科先行实务模块 -回复

威科先行实务模块-回复威科先行实务模块是一种先行实务的方法论,旨在通过引入威科模块来推动创新和创造优质产品。
威科模块是一种可重复使用和可模块化的思维模式,它可以帮助团队在不断变化的市场环境中快速应对挑战,提高创新效率。
本文将以威科先行实务模块为主题,逐步回答相关问题。
一、威科先行实务模块的定义和背景威科先行实务模块是源于威尔逊广告公司(Wieden+Kennedy)的一种创新方法论。
威尔逊广告公司是全球领先的广告公司,他们将威科模块引入公司的创新流程,帮助团队更好地应对广告行业的挑战。
威科先行实务模块的背景可以追溯到当代工业生产中的模块化思想。
在工业生产中,模块化被广泛应用以提高生产效率和产品质量。
威科先行实务模块将这种模块化思想引入广告行业,形成一种可重复使用的创新工具,以推动创新和优质产品的产生。
二、威科先行实务模块的具体步骤1. 定义问题和目标:首先,团队需要明确面临的问题和想要解决的目标。
这个步骤是整个威科先行实务模块的基础,只有明确问题和目标,才能有针对性地进行创新实践。
2. 收集信息和启发灵感:在这个步骤中,团队需要广泛收集相关信息和灵感,包括市场数据、竞争对手的实践、行业趋势等。
通过收集信息和启发灵感,团队可以更好地理解问题,为接下来的创新实践做好准备。
3. 设计并制作原型:在这一阶段,团队需要根据前两个步骤的结果,迅速设计并制作出原型。
原型是一个具体的产品或解决方案的初步表现,可以帮助团队更好地理解和验证创新想法。
4. 测试和反馈循环:在原型制作完成后,团队需要进行测试,并根据用户的反馈来不断改进和优化。
这个步骤是一个循环往复的过程,通过反复测试和收集用户反馈,团队可以逐步优化创新想法,直至达到预期目标。
5. 部署和迭代改进:最后一步是将优化后的创新想法部署到实际环境中,并进行迭代改进。
这个过程包括产品的推广、市场反馈的观察和用户体验的优化。
通过不断迭代改进,团队可以进一步完善产品,并提高市场竞争力。
openscenario标准

openscenario标准开场白:1. 介绍openscenario标准的背景和意义openscenario标准是一种用于描述仿真场景的规范化格式。
它旨在实现各个仿真环境之间的互操作性,以及使得场景描述可以被多种仿真工具所共享和重用。
openscenario标准的制定,对于推动自动驾驶技术和智能交通系统的发展具有重要意义。
在这篇文章中,我们将深入探讨openscenario标准的相关内容,并分析其在自动驾驶领域中的应用价值。
2. openscenario标准的核心要素openscenario标准主要包括以下核心要素:- 剧本描述(scenario)- 场景元素(entity)- 行为定义(action)- 时间线(timeline)3. openscenario标准的应用范围openscenario标准可以被广泛应用于自动驾驶仿真、交通流仿真、交通事故重现等领域。
其灵活的描述方式和丰富的元素设置,使得其可以适用于不同类型的场景描述和仿真需求。
4. openscenario标准的优势与价值openscenario标准相较于传统的场景描述方式,有着诸多优势和价值所在:- 规范化的描述格式,便于不同仿真工具之间的互操作性- 丰富的元素设置,可以更加真实地描述各种交通场景- 易读易编辑的格式,方便工程师和研究人员进行使用和修改- 促进仿真场景的共享和重用,加速自动驾驶技术的发展和应用5. openscenario标准的发展现状与未来展望openscenario标准目前已经得到了业界和学术界的广泛关注和认可,一些知名的仿真工具和自动驾驶系统已经开始使用openscenario标准进行场景描述和仿真测试。
未来,openscenario标准将继续发展完善,逐步完善其在自动驾驶领域的应用范围,为自动驾驶技术的发展和应用带来更多的可能性和机遇。
总结:通过对openscenario标准的介绍和分析,我们可以看到,这一标准的出现对于促进自动驾驶技术的发展具有非常重要的意义。
医疗制造企业基于ROSA架构支撑海外业务发展实践分享

医疗制造企业基于 ROSA 架构支撑海外业务发展实践分享一.背景介绍某医疗制造企业,在疫情环境之下急速发展,业务规模迅速扩大,海外市场订单暴增,该医疗企业及时抓住国际市场机遇,树立自身的国际品牌形象,在提升医疗制造技能的同时更注重IT建设和服务创新。
为了能迅速支撑并服务激增的海外业务,该医疗企业在海外亚马逊云科技公有云环境借助OpenShift托管服务,迅速搭建起云原生的开发和运行环境,令海外业务系统准时上线,紧跟业务的步伐,也充分体现了IT对业务的支持与促进作用。
二.ROSA概述OpenShift是一个企业级的Kubernetes容器平台,它为企业应用系统的开发和运行提供了一个易扩展、可信任的容器环境。
OpenShift扩展了Kubernetes容器编排平台,内置企业级应用扩展组件,以增强企业级应用的生命周期管理能力,从开发到运维能力的增强再到安全项的加固。
借助OpenShift,用户可以在混合云、多云的环境中实现工作负载的持续集成和持续部署。
OpenShift扩展了KubernetesROSA是Red Hat OpenShift Service on Amazon Web Services的简称,它是红帽容器平台OpenShift在亚马逊云科技上的托管服务。
用户可以在ROSA上快速构建和部署业务应用,不需要过多的关心底层基础设施的搭建和运维,因此ROSA的用户更能关注于企业的业务价值,而不是与企业业务无关的环境和不同基础设施的适配。
用户自己搭建和运维的OpenShift集群亚马逊云科技和红帽的站点可靠性工程 (SRE) 专家负责管理和运维底层平台,因此用户不必担心复杂的基础架构层管理工作。
ROSA 还提供了与亚马逊云科技的计算、存储、网络、数据库、分析工具、机器学习、移动应用等服务的无缝集成,在加速用户业务系统的构建与交付的同时也节省了用户的运维成本。
由SRE管理和运维的ROSA托管服务三.系统部署设计ROSA 架构支持多种网络配置类型:公共网络、专用网络和亚马逊云科技PrivateLink网络,可满足不同用户的安全需求。
基于ROS的自主无人机VSLAM研究

基于ROS的自主无人机VSLAM研究刘峰;吕强;郭峰;王国胜【摘要】针对未知复杂环境中无人机无法获得外部辅助情况下自主导航所面临的严峻问题,提出在ROS框架下在板运行单目VSLAM算法的自主无人机方案,仅依靠自身摄像机自主地完成SLAM和导航任务.研究VSLAM算法原理与前沿算法ORB-SLAM,设计并搭建了自主导航无人机平台,针对搭建的无人机平台方案和特点完成视觉定位部分的改进设计.实验表明,自主无人机能够在未知环境中,自主实现同时定位和地图构建任务并完成精确的飞行控制与导航.【期刊名称】《现代防御技术》【年(卷),期】2016(044)006【总页数】6页(P61-66)【关键词】视觉同时定位于地图构建;自主无人机;ROS;视觉定位;位姿图优化;自主导航【作者】刘峰;吕强;郭峰;王国胜【作者单位】装甲兵工程学院控制工程系,北京100072;装甲兵工程学院控制工程系,北京100072;装甲兵工程学院控制工程系,北京100072;装甲兵工程学院控制工程系,北京100072【正文语种】中文【中图分类】V279;V448.22+4;TP391.41微小型空中无人平台在军事侦察、灾难救援、探测和监控等领域都扮演着重要的角色,无人机的自主飞行控制对空中无人平台走向智能化具有里程碑的意义。
然而自主无人机在飞行过程中的最大挑战是定位信息的获取,目前仅仅依赖GPS的定位方式缺乏精度和可靠性,GPS信号在有覆盖的环境中容易丢失。
视觉传感器能够有效获取周围环境信息,重量轻,功耗低,所以采用视觉方法进行无人机定位正逐渐成为研究热点[1-6],文献[1]的方法被成功应用于无人机中[7-8]。
对无人机的飞行控制大部分还采用人工远程控制,法国派诺公司的ARDrone四旋翼[9]搭载视觉传感器实现无人机室内定位,通过Wi-Fi将图像数据传回地面站计算机,地面站计算机完成数据处理并控制无人机的飞行。
慕尼黑科技大学搭建四旋翼无人机[10]RGB-D摄像头的稠密跟踪与地图构建系统,获取室内环境3D模型完成无人机定位和自主飞行,算法依赖地面站GPU,需要无线模块完成数据传输。
Intex Consulting Group Visual COBOL 产品介绍说明书

IntexConsulting GroupVisual COBOL delivers costs savings through flexible multi-cloud deployment options and timesaving developer efficiencies.Who is Intex Consulting Group?Intex enables digital transformation of textile production by providing Enterprise Resource Planning (ERP) and Manufacturing Execution System (MES) solutions for all textile pro-cesses, from supervising machines to man-aging the company.Cost Pressures Drive Demand for a Cloud-Ready SolutionThe textile industry is one of the most complex industries of our times. This high level of com-plexity in the textile supply chain can only be managed through digital solutions. With world-wide distribution, Intex Consulting has served this specialized industry since 1985 with its flagship solution written in COBOL and origi -nally deployed to Fujitsu BS2000 mainframeswhich were very popular in Germany at that time. Dominik Schischma, Chief Innovation Officer at Intex Consulting, explains: “As the years progressed, we noticed that many of our customers moved from a mainframe and UNIX platforms to Windows because it was more cost-effective to run. We ported our COBOL application to Windows using Micro Focus (now part of OpenT ext) Net Express and today, 90 percent of our customers run on this plat -form. We’ve established strategic partnerships to ensure that we deliver integrated solutions for our customers, giving them end-to-end vis-ibility across their supply chain.”Intex created a real-time integration between SAP and its ERP solution, so that any produc -tion planning is directly reflected in SAP with orders and stocks fully synchronized between the systems. This is a great advantage for many larger Intex customers, who rely on SAP to run their general business, but need the more spe-cialized Intex solution to manage their textile business. In recent years, the textile industry has come under a lot of cost pressures. As a result, Intex has seen a strong increase in the demand for a cloud solution, as this typically reduces operating costs compared to an on-premises solution. Because Net Express did not support the latest versions of Windows and the SAP HANA platform edition database didnot support a C++ interface, the team looked“Our beta experience with Visual COBOL was fantastic. We had adirect line into R&D and our technical suggestions were taken on board. It was great to receive the newversion with all the improvements.”DOMINIK SCHISCHMA Chief Innovation OfficerIntex Consulting GroupAt a Glance■ Industry T echnology ■ Location Germany ■ ChallengeRespond to customer demand for more flexible application deployment to the cloud, while retaining decades of business intelligence and leveraging existing development skills ■ Products and Services Visual COBOL ■ Success Highlights+ Full deployment flexibility with a multi-cloud solution+ Easy workload migration to Linux for cost-effective cloud deployment+ Decades of critical business intelligence retained and easily extended with .NET+ Seamless integration between COBOL and .NET offers a choice of the best of both worldsCase Studyfor a new solution that supported the latest operating platforms both in the cloud and on premises while still enabling use of the SAP HANA platform edition database to achieve a full integration with SAP technologies. Leveraging Existing Development Skills and Modern Platformswith Visual COBOLThe Intex team next looked for options to re-use their COBOL code in .NET. The team saw the .NET platform as the best solution to both easily integrate modern technologies and to expand Intex’s SAP integration to the SAP HANA platform edition. They compared Fujitsu NetCOBOL with Visual COBOL. Intex defined a few ‘must have’ features, such as support for the new .NET versions 5 and 6 and for modern APIs like REST or Cloud Services which are key for essential integration with other solutions. Because it offers a complete and integrated solution to its customers, Intex must also pro-vide e-invoice integration in more and more countries. This requires strong encryption sup-port and adaptation to different requirements depending on each customer’s country of location. During a proof-of-concept, they dis-covered that Visual COBOL provided the best support in these areas, including options for .NET deployment to Linux as well as Windows. The ability to reuse code containing valu-able business intelligence built over decades, swung the decision for Visual COBOL. “We have 12,000 COBOL source files containing millions of lines of code,” says Mr. Schischma. “Visual COBOL allowed us to fully leverage our existing development skills and experience in a step-by-step transformation to the .NET plat-form. Because it was still COBOL code runningin .NET, our developers did not need to reskilland yet they now have full access to the .NETplatform and all its libraries. We compiled 97percent of our existing code automaticallywith Visual COBOL without any manual inter-vention. The remaining three percent requiredsome adjustments due to deprecated APIcalls, but in general all modules were compiledrelatively easily.”Cost-Effective Linux CloudDeployment OptionsThanks to Visual COBOL, by compiling COBOLcode to .NET, Intex can now also deploy itsapplications to Linux as well as Windows. Mr.Schischma comments: “With Visual COBOLwe provide our customers with a range of plat-form and cloud choices. With minimum effort,we can offer our software as a service withany cloud provider chosen by our customers.The Linux platform is the lowest cost optionin the cloud and Visual COBOL gives us theflexibility to easily deploy our workload to Linuxor Windows, offering a more cost-effectivecloud option to our customers depending ontheir needs.”Development ProductivityImprovementWith over 12,000 COBOL source files in the ap-plication, the Intex development team opted touse Visual Studio Code for COBOL develop-ment. At the time, OpenT ext was developinga new release of Visual COBOL with supportfor Visual Studio Code and Mr. Schischmaworked directly with OpenT ext Research andDevelopment to beta test the new release. Hecomments: “Our beta experience with VisualCOBOL was fantastic, we had a direct line intoR&D and our technical suggestions were takenon board. It was great to receive the new ver-sion with all the improvements.”The new Visual COBOL version with its supportfor Visual Studio Code has improved developerproductivity with faster editing and debuggingsupport. The Intex team also moved to GitLabat the same time, to provide a comprehensivecode version control repository which is fullyintegrated into the IDE.Intex developers enjoy the benefits of the .NETplatform too, according to Mr. Schischma:“With the .NET libraries now at our fingertipswe can complete complex coding tasks withsignificantly less effort than before. What usedto take up to 10 days of programming, is nowdone in less than three days, representing a 70percent productivity and cost improvement insystem-side areas. Working with .NET COBOLcode it is easy to just call a .NET function andfully integrate the .NET world into our solutions.”He concludes: “Although we have a lot of in-house COBOL expertise and managed mostof the migration to Visual COBOL ourselves,we appreciated the support of the local MicroFocus (now part of OpenText) technical ex-perts. T oday, we offer full flexibility to our cus-tomers enabling them to respond quickly tothe ever-changing market conditions in thetextile industry.”268-000002-001 | O | 03/23 | © 2023 Open T ext。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Christian Forster, Matia Pizzoli, Davide Scaramuzza∗
Abstract— We propose a semi-direct monocular visual odometry algorithm that is precise, robust, and faster than current state-of-the-art methods. The semi-direct approach eliminates the need of costly feature extraction and robust matching techniques for motion estimation. Our algorithm operates directly on pixel intensities, which results in subpixel precision at high frame-rates. A probabilistic mapping method that explicitly models outlier measurements is used to estimate 3D points, which results in fewer outliers and more reliable points. Precise and high frame-rate motion estimation brings increased robustness in scenes of little, repetitive, and high-frequency texture. The algorithm is applied to micro-aerial-vehicle stateestimation in GPS-denied environments and runs at 55 frames per second on the onboard embedded computer and at more than 300 frames per second on a consumer laptop. We call our approach SVO (Semi-direct Visual Odometry) and release our implementation as open-source software.
∗ The authors are with the Robotics and Perception Group, University of Zurich, Switzerland—http://rpg.ifi.uzh.ch. This research was supported by the Swiss National Science Foundation through prlying Cameras”), the National Centre of Competence in Research Robotics, and the CTI project number 14652.1.
I. I NTRODUCTION Micro Aerial Vehicles (MAVs) will soon play a major role in disaster management, industrial inspection and environment conservation. For such operations, navigating based on GPS information only is not sufficient. Precise fully autonomous operation requires MAVs to rely on alternative localization systems. For minimal weight and powerconsumption it was therefore proposed [1]–[5] to use only a single downward-looking camera in combination with an Inertial Measurement Unit. This setup allowed fully autonomous way-point following in outdoor areas [1]–[3] and collaboration between MAVs and ground robots [4], [5]. To our knowledge, all monocular Visual Odometry (VO) systems for MAVs [1], [2], [6], [7] are featurebased. In RGB-D and stereo-based SLAM systems however, direct methods [8]–[11]—based on photometric error minimization—are becoming increasingly popular. In this work, we propose a semi-direct VO that combines the success-factors of feature-based methods (tracking many features, parallel tracking and mapping, keyframe selection) with the accurracy and speed of direct methods. High framerate VO for MAVs promises increased robustness and faster flight maneuvres. An open-source implementation and videos of this work are available at: http://rpg.ifi.uzh.ch/software A. Taxonomy of Visual Motion Estimation Methods Methods that simultaneously recover camera pose and scene structure from video can be divided into two classes:
a) Feature-Based Methods: The standard approach is to extract a sparse set of salient image features (e.g. points, lines) in each image; match them in successive frames using invariant feature descriptors; robustly recover both camera motion and structure using epipolar geometry; finally, refine the pose and structure through reprojection error minimization. The majority of VO algorithms [12] follows this procedure, independent of the applied optimization framework. A reason for the success of these methods is the availability of robust feature detectors and descriptors that allow matching between images even at large inter-frame movement. The disadvantage of feature-based approaches is the reliance on detection and matching thresholds, the neccessity for robust estimation techniques to deal with wrong correspondences, and the fact that most feature detectors are optimized for speed rather than precision, such that drift in the motion estimate must be compensated by averaging over many feature-measurements. b) Direct Methods: Direct methods [13] estimate structure and motion directly from intensity values in the image. The local intensity gradient magnitude and direction is used in the optimisation compared to feature-based methods that consider only the distance to some feature-location. Direct methods that exploit all the information in the image, even from areas where gradients are small, have been shown to outperform feature-based methods in terms of robustness in scenes with little texture [14] or in the case of cameradefocus and motion blur [15]. The computation of the photometric error is more intensive than the reprojection error, as it involves warping and integrating large image regions. However, since direct methods operate directly on the intensitiy values of the image, the time for feature detection and invariant descriptor computation can be saved. B. Related Work Most monocular VO algorithms for MAVs [1], [2], [7] rely on PTAM [16]. PTAM is a feature-based SLAM algorithm that achieves robustness through tracking and mapping many (hundreds) of features. Simultaneously, it runs in real-time by parallelizing the motion estimation and mapping tasks and by relying on efficient keyframe-based Bundle Adjustment (BA) [17]. However, PTAM was designed for augmented reality applications in small desktop scenes and multiple modifications (e.g., limiting the number of keyframes) were necessary to allow operation in large-scale outdoor environments [2]. Early direct monocular SLAM methods tracked and mapped few—sometimes manually selected—planar patches [18]–[21]. While the first approaches [18], [19] used filtering algorithms to estimate structure and motion, later methods