毕业设计译文
毕业设计中英文翻译【范本模板】
英文The road (highway)The road is one kind of linear construction used for travel。
It is made of the roadbed,the road surface, the bridge, the culvert and the tunnel. In addition, it also has the crossing of lines, the protective project and the traffic engineering and the route facility。
The roadbed is the base of road surface, road shoulder,side slope, side ditch foundations. It is stone material structure, which is designed according to route's plane position .The roadbed, as the base of travel, must guarantee that it has the enough intensity and the stability that can prevent the water and other natural disaster from corroding.The road surface is the surface of road. It is single or complex structure built with mixture。
The road surface require being smooth,having enough intensity,good stability and anti—slippery function. The quality of road surface directly affects the safe, comfort and the traffic。
毕业设计外文翻译译文

1 工程概论1.1 工程专业1.2 工业和技术1.3 现代制造业工程专业1 工程行业是历史上最古老的行业之一。
如果没有在广阔工程领域中应用的那些技术,我们现在的文明绝不会前进。
第一位把岩石凿削成箭和矛的工具匠是现代机械工程师的鼻祖。
那些发现地球上的金属并找到冶炼和使用金属的方法的工匠们是采矿和冶金工程师的先祖。
那些发明了灌溉系统并建造了远古世纪非凡的建筑物的技师是他们那个时代的土木工程师。
2 工程一般被定义为理论科学的实际应用,例如物理和数学。
许多早期的工程设计分支不是基于科学而是经验信息,这些经验信息取决于观察和经历,而不是理论知识。
这是一个倾斜面实际应用的例子,虽然这个概念没有被确切的理解,但是它可以被量化或者数字化的表达出来。
3 从16、17世纪当代初期,量化就已经成为科学知识大爆炸的首要原因之一。
另外一个重要因素是实验法验证理论的发展。
量化包含了把来源于实验的数据和信息转变成确切的数学术语。
这更加强调了数学是现代工程学的语言。
4 从19世纪开始,它的结果的实际而科学的应用已经逐步上升。
机械工程师现在有精确的能力去计算来源于许多不同机构之间错综复杂的相互作用的机械优势。
他拥有能一起工作的既新型又强硬的材料和巨大的新能源。
工业革命开始于使用水和蒸汽一起工作。
从此使用电、汽油和其他能源作动力的机器变得如此广泛以至于它们承担了世界上很大比例的工作。
5 科学知识迅速膨胀的结果之一就是科学和工程专业的数量的增加。
到19世纪末不仅机械、土木、矿业、冶金工程被建立而且更新的化学和电气工程专业出现了。
这种膨胀现象一直持续到现在。
我们现在拥有了核能、石油、航天航空空间以及电气工程等。
每种工程领域之内都有细分。
6 例如,土木工程自身领域之内有如下细分:涉及永久性结构的建筑工程、涉及水或其他液体流动与控制系统的水利工程、涉及供水、净化、排水系统的研究的环境工程。
机械工程主要的细分是工业工程,它涉及的是错综复杂的机械系统,这些系统是工业上的,而非单独的机器。
毕业设计外文翻译原文.
Optimum blank design of an automobile sub-frameJong-Yop Kim a ,Naksoo Kim a,*,Man-Sung Huh baDepartment of Mechanical Engineering,Sogang University,Shinsu-dong 1,Mapo-ku,Seoul 121-742,South KoreabHwa-shin Corporation,Young-chun,Kyung-buk,770-140,South KoreaReceived 17July 1998AbstractA roll-back method is proposed to predict the optimum initial blank shape in the sheet metal forming process.The method takes the difference between the ®nal deformed shape and the target contour shape into account.Based on the method,a computer program composed of a blank design module,an FE-analysis program and a mesh generation module is developed.The roll-back method is applied to the drawing of a square cup with the ¯ange of uniform size around its periphery,to con®rm its validity.Good agreement is recognized between the numerical results and the published results for initial blank shape and thickness strain distribution.The optimum blank shapes for two parts of an automobile sub-frame are designed.Both the thickness distribution and the level of punch load are improved with the designed blank.Also,the method is applied to design the weld line in a tailor-welded blank.It is concluded that the roll-back method is an effective and convenient method for an optimum blank shape design.#2000Elsevier Science S.A.All rights reserved.Keywords:Blank design;Sheet metal forming;Finite element method;Roll-back method1.IntroductionIt is important to determine the optimum blank shape of a sheet metalpart.However,because its deformation during the forming process is very complicated,it is not easy to design the optimum blank shape even by the skilled labor based on the experience of many years.Recently,computa-tional analysis for a complex automobile part has been able to be carried out easily due to improved computer perfor-mance and the numerical analysis technique.In the analysis process,all kinds of variables that affect the deformation should be considered.The optimum blank shape leads to the prevention of tearing,uniform thickness distribution and to the reduction of the press load during drawing.If the blank shape is designed optimally,the formability will be increased and the ®nal product will require the least amount of trimming at the end of theprocess.Therefore,it is desirable to design the blank shape with a uniform ¯ange of its periphery after deep drawing.Several numerical solutions for the deep drawing process of non-circular components have been reported.Hasek and Lange [1]gave an analytical solution to this problem usingthe slip-line ®eld-method with the assumption of plane-strain ¯ange deformation.Also,Jimma [2]and Karima [3]used the same method.V ogel and Lee [4]and Chen and Sowerby [5]developed ideal blank shapes by the method of plane-stress characteristics.Sowerby et al.[6]developed a geometric mapping method providing a trans-formation between a ¯at sheet and the ®nal surface.Majlessi and Lee [7,8]developed a multi-stage sheet metal forming analysis method.Chung and Richmond [9±12]determined ideal con®gurations for both the initial and the intermediate stages that are required to form a speci®ed ®nal shape using the ideal forming theory.Lee and Huh [13]introduced a three-dimensional multi-step inverse method for the optimum design of blank shapes.Toh and Kobayashi [14]developed arigid±plastic ®nite-element method for the drawing of general shapes based on membrane theory and ®nite-strain formulations.Zhaotao [15]used the boundary element method for a 2D potential problem to design optimum blank shapes.This paper presents an optimum design method of blank shapes for the square cup drawing process considering process variables.An optimum blank shape of square cup drawing was obtained using the proposed method.Also,it was applied to the deep drawing of an automobile sub-frame,and an optimum blank shape with a uniform ¯ange at its periphery weredetermined.Journal of Materials Processing Technology 101(200031±43*Corresponding author.Tel.: 82-2-705-8635;fax: 82-2-712-0799.E-mailaddress :nskim@ccs.sogang.ac.kr (Naksoo Kim0924-0136/00/$±see front matter #2000Elsevier Science S.A.All rights reserved.PII:S 0924-0136(9900436-72.Design of optimum blank shapeThe de®nition of the optimum blank shape is the mini-mization of the difference between the outer contour of the deformed blank and the target contour that indicates the residual ¯ange of uniform size around the periphery of the product.The target contour is generated from the outer contour of the product and determines an optimum blank shape using the results of ®nite-element simulation with the roll-back method.In the process of blank design the simula-tion is performed using an explicit ®nite-element software PAM-STAMP and the interface program is developed for con-necting the blank design module,the remeshing module,the post-processor module and the FE-analysis package.2.1.Roll-back method`The roll-back method starts by de®ning the target con-tour.After determining the length of the ¯ange that remains around the periphery of the product,the pro®le of the target contour is created by offsetting an equal distance from the outer contour of the product and its mesh system is gener-ated by beam elements.The process of blank design is illustrated in Fig.1.The mesh system of the prepared square blank for initial analysis is shown in Fig.1(a.After an analysis,the mesh system of the deformed blank and the target contour are shown in Fig.1(b.At the ¯ange of the deformed blank,a distinction is made between the interior ¯ange within the target contour and the exterior ¯ange out ofthe target contour.The ¯ange out of the target contour is the part that will be trimmed and the ¯ange within the target contour is the part which does not keep shape is due to the incompletion of the blank shape.Thus the modi®ed blank shape should be designed to take the shape of the outer contour of the product completely.The contour of themodi®ed blank shape using the roll-back method and the initial blank shape is shown in Fig.1(c.The mesh system of the modi®ed blank shape for FE-analysis is shown in Fig.1(d.The blank design method will be introduced in detail.The quarter of the deformed blank and the target contour are shown in Fig.2(a.According to the previous explanation,the remained ¯ange can be divided into the interior and the exterior ¯ange.The design process of region A is shown in Fig.2(b.In the mesh of the deformed blank a square grid IJKL on the target contour will be considered,and then the internal dividing point Q in will be calculated at the ratio of m tonFig.1.Illustrating the process of ®nding the optimum blank:(ainitial blankshape;(bdeformed blank and target contour;(croll-back blank and contour;(dmodi®ed blankshape.Fig.2.The roll-back process of a mesh located on the surface of the ¯ange:(aa mesh located on the surface of the ¯ange;(bregion A:residual drawing part out of target contour;(cregion B:residual drawing part inside the target contour.32J.-Y.Kim et al./Journal of Materials Processing Technology 101(200031±43between the node J and K.This point is mapped back into the mesh system of the initial blank.The internal dividing point Q H in is calculated at the ratio of m to n between the same node J H and K H.The following process is performed on the element of the deformed blank on the target contour.The describing point of the outer contour of themodi®ed blank shape can be calculated.If the coordinates of the nodes J and K areJ(x1,y1,K(x2,y2and the coordinates of the nodes J H and K H are J H x H1Y y H1 Y K H x H2Y y H2 ,the ratio of m to n ism X n JQJKX QKJK(1The coordinate of the internal dividing point Q H in can be expressed asQ H inmx H2 nx H1m nYmy H2 ny H1m n(2The design process of region B is shown in Fig.2(c.In the mesh of the deformed blank a square grid MNOP of which the outward edge crosses the target contour should be considered,and then the external dividing point Q out can be calculated at the ratio of m to n between nodes O and P.This point is mapped back into the mesh system of the initial blank.The external dividing point Q H out can be calculated at the ratio of m to nbetween the same nodes Q H and P H.If the coordinates of the nodes O and P areO(x1,y1,P(x2,y2and the coordinates of the O H and P H are O H x H1Y y H1 Y P H xH2Y y H2 ,the ratio of m to n ism X n OQOPX QPOP(3The coordinate of the external dividing point Q H out can be expressed asQ H outmx H2Ànx H1Ymy H2Àny H1(4The following process is performed on all the element of the deformed blank related on the target contour.The points describing the outer contour of modi®ed blank shape can be calculated.When all points of two cases are connected by the spline,the outer contour of modi®ed blank can be described.This process is shown in Fig.3.2.2.The development of the optimum blank design programTo optimize the initial blank shape,a design program was developed following the prescribing method and procedures. This program consists of the blank shaper designmodule, the mesh generation module and the post-processor module. The whole procedure is illustrated in Fig.4.To perform the design process of a blank shape,an interface module is needed.This module is developed to read the output®le of ®nite-element analysis and design the optimum blank shape and generate theinput®le.3.Designs of blank shape and application3.1.Blank design of a square cupTo verify the validity of the roll-back method,it is applied to the process of square cup deep drawing.Several numerical solutions of the deep drawing process for non-circular components have been reported recently.The pub-lished blank shapes by Lee and coworkers[16±18]are compared with the resultusing the roll-back method.The Fig.3.Flowchart of the blank design module.Fig.4.Flow chart of the main program.J.-Y.Kim et al./Journal of Materials Processing Technology101(200031±4333dimensions of the die and punch set for an analysis are shown in Fig.5.The material of the sheet metal is cold-rolled steel for an automobile part.The following are the material propertiesand process variables.Stress±strain relation:"s58X 78Â 0X 00003 "e0X 274 kgf a mm 2 ;Lankford value:"R 1X 679;initial blank size:160mm Â160mm square blank;initial thickness:t 0.69mm;friction coef®cient:m 0.123;and blank-holding force:4000kgf (1kgf 9.81N.The deformed shapes of the square cup obtained from the initial blank and the optimum blank are shown in Fig.6.Inthe present work the optimum blank shape for a square cup that is of 40mm height and 5mm width of ¯ange will be determined.Each modi®ed blank shape after the application of the roll-back method is illustrated in Fig.7.When an 160mm Â160mm square blank is used for an initial blank the outer contour of deformed blank is shown in Fig.7(a.A ®rst modi®ed blank shape can be calculated with the result of the initial square blank.An analysis result is shown inFig.7(b.The difference between the deformed shape and the target contour issigni®cant.If the blank design process is repeated several times the difference decreases and con-verges to zero.Hence a square cup with a uniform ¯ange at its periphery can be made.The comparison between the ®nal result and a published result is shown in Fig.8.In the transverse direction the optimum blank shape using the roll-back method is larger than the published result.The load±displacement curves in square cup drawing process with various initial blank shapes are shown in Fig.9.As the modi®cation is repeated,the gap of the load±displacement curves before and after iteration decreases.Thus after the third modi®cation the maximum value of the load becomes the mean value between that of the ®rst and second modi®cation.After three modi®cations the optimum blank shape is determined,then the result with the optimum blank shape is compared with results in the literature.The thickness strain distribution in the diagonal direction is shown in Fig.10(a,whilst the thickness strain distribution in the transverse direction is shown in Fig.10(b.In the thickness strain distribution the result using the roll-back method is slightly different from the published result,but the overall strain distributions are quite similar.It is thus veri®ed that the roll-back method is a useful approach in the design of optimum blank shapes.3.2.Blank design of the left member of a front sub-frameAn analysis for members of a box-type front sub-frame is performed.The left member is selected as one of the subjects for analysis because its shape is shallow but complex.Fig.11shows the manufacturing set-up as modeled for the numer-ical simulation.The left member requires a uniform ¯ange for the spot welding between the upper and the lower parts besides the improvement of formability.It is recommended that the length of uniform ¯ange is 30mm.The target contour is de®ned at the position which is 30mm from the outer contour of product and is shown in Fig.12.Its mesh system is generated by beam elements.The material of the sheet metal is SAPH38P,a hot-rolled steel for automobile parts.The following are the material properties and process variables.Stress±strain relationship:"s 629Â"e 0X 274(MPa;Lankford value:"R1X 030;initial thickness:t 2.3mm;friction coef®cient:m 0.1;blank holding pressure:1MPa.Fig.5.Geometrical description of the tooling for the deep drawing of a square cup (dimensions:mm.Fig.6.The deformed shape of square cups with FE-mesh geometry where the cup height is 40mm:(adeformed shape of the square cup obtained from the initialblank;(bdeformed shape of the square cup obtained from the optimum blank.34J.-Y.Kim et al./Journal of Materials Processing Technology 101(200031±43A hexagonal blank is used as the initial blank.After three modi®cations the optimum blank shape is determined.For this case,the load±displacement curves with various blank shapes are shown in Fig.13.The comparison of the initial ¯ange and the deformed ¯ange with various blank shapes is shown in Fig.14.As the modi®cation is repeated,the maximum punch load is reduced and the outer contour may be drawn to the target contour at the same time.The thickness distribution is improved step by step;the thickness distribution with various blank shapes being shown in Fig.15.The comparison between the optimum blank shape designed by the roll-back method and the blank shape for mass production is illustrated in Fig.16.The optimum blank shape shows curvature because the outer contour of the product and the ¯ow rate of the sheet metal are considered.However,the blank shape for mass production is simple and straight because the convenience of cutting is considered.To verify the result an initial blank cut by a laser-cutting machine was prepared.The ®nal shape drawn with the initial blank in the press shop isshownparison of the initial ¯ange shapes and the deformed ¯angeshapes:(ainitial square blank;(b®rst modi®ed blank;(csecond modi®ed blank;(dthird modi®edblank.parison of the initial blank contour between the roll-back method and Huh's method.J.-Y.Kim et al./Journal of Materials Processing Technology 101(200031±4335in Fig.17.It had a ¯ange of uniform size around its periphery.The thickness distribution at the position of four sections in the longitudinal direction of the left member was mea-sured.Fig.18shows a comparison of thickness between the computed results and the experimental results in each sec-tion.In section A,the thickness distribution has some error at the end of the ¯ange,whilst in sections B and C,the computed results are compatible with the experimental results.In section D,the computed results predicted that a split might happen,but the experimental cup did notsplit.Fig.9.Load±displacement curves in the square cup drawing process with various initial blankshapes.Fig.10.Thickness strain distribution in a square cup:(adiagonal direction;(btransversedirection.Fig.11.FE-model for a sub-frame left member.If the initial blank shape,the ®nal shape and thickness distribution are considered,the results predicted by the roll-back method has a good agreement with the experimental values.Therefore,as well as the roll-back method being applicable to a simple shape,it can be applied to a complex and large shape.3.3.Blank design of No.2member of front sub-frameAn analysis of No.2member is performed,with its deep and complex shape.Its optimum blank shape is designed using the roll-back method.Fig.19shows the manufacturing set-up as modeled for the numerical simulation.Because its drawing depth is very deep,eccentricity may occur due to the blank initial position or shape.Thus the target contour is de®ned at the position that is 40mm from the outer contour of product and it is shown in Fig.20.A square blank is used as the initial blank.After threemodi®cations the optimum blank shape isdetermined.Fig.12.Target contour for the leftmember.Fig.13.Load±displacement curves in the left member drawing process with various blankparison of the initial ¯ange shapes and the deformed ¯ange shapes:(ainitial blank;(b®rst modi®ed blank;(csecond modi®ed blank;(dthird modi®ed blank.Fig.15.Thickness distribution with various blank shapes(unit:mm:(ainitial blank;(b®rst modi®ed blank;(csecond modi®ed blank;(dthird modi®ed blank.parison of the initial blank shapes predicted by the roll-back method and those designed by skilled labor.For this case,load±displacement curves for various blank shapes are shown in Fig.21,whilst a comparison of the initial ¯ange and the deformed ¯ange with various blank shapes in shown in Fig.22.The thickness distribution with the initial shape is shown in Fig.23,whilst the thickness distribution with the optimum blank shape is shown in Fig.24.The thickness distribution of the side-wall and of the ®llet connecting the side-wall to the top isimproved.Fig.17.Left member drawn in the press shop with the initial blank predicted by the roll-backmethod.Fig.18.(aSections for measuring the thickness distribution.(b±eThickness distributions at sections A±D,respectively.3.4.Design of the welding line with TWB analysis of No.2memberAfter designing the optimum blank shape of No.2member,a tailor-welded blank is applied to this member.To reduce the weight of the sub-frame,structural analysis is performed.On the area where the stress intensity level is low,it is proposed to reduce the thickness locally.Therefore,it is required to design a tailor-welded blank that makes a speci®ed shape after deformation.When two sheet metals of different thickness are welded together,their metal ¯ow is different from that of sheet metal of the same thickness.Thus it is dif®cult to design the location of the weld line.In this simulation the weld line is designed by the use of the roll-back method and the welding line should be located at the speci®ed position after deformation:the speci®ed position is 120mm on both sides of the centerline.Thus the target line is de®ned and meshed by beam elements.The outer contour of TWB and the welding line are shown in Fig.25,and the results are shown in Figs.26and 27.The welding lines can be reached to the target line but,on the top of the blank that has the lower thickness,fracture may occur.This is the same as the result that in the deep drawing of a tailor-welded blank with different thickness,failure occurred at the ¯at bottom of the punch parallel to the weld line.This is due to the deformation not beingdis-Fig.19.FE-model for the sub-frame leftmember.Fig.20.Target contour for the No.2member.Fig.21.Load±displacement curves in the No.2member drawing process with various blank shapes.J.-Y. Kim et al. / Journal of Materials Processing Technology 101 (2000 31±43 41 Fig. 23. Thickness distribution with the initial blank shape (unit: mm: (a front view; (b rear view. Fig. 24. Thickness distribution with the optimum blank shape (unit: mm: (a front view; (b rear view. Fig. 22. Comparison of the initial ¯ange shapes and the deformed ¯ange shapes: (a initial blank; (b ®rst modi®ed blank; (c second modi®ed blank; (d third modi®ed blank. Fig. 25. Comparison of the weld line between the initial blank shape and the deformed blank shape.42 J.-Y. Kim et al. / Journal of Materials Processing Technology 101 (2000 31±43 4. Conclusions In this paper the roll-back method that designs an optimum blank shape is proposed. Based on the method, a computer program composed of a blank design module,an FE-analysis program and a mesh generation module is developed and it is applied to the deep drawing of a front sub-frame. The results of the present paper are summarized as follows: 1. To verify the validity of the proposed method it is applied to the deep drawing of a square cup. The outer contour may be drawn to the target contour. 2. The roll-back method is applied to the optimum blank design of a left member of an automobile sub-frame. The thickness distribution and the load level are improved. When the initial blank shape, the ®nal shape and thickness distribution are compared, the results predicted by the roll-back method have a good agreement with the experimental results. It is concluded that this method can be applied to the deep drawing of the complex automobile parts. 3. The analysis of No. 2 member with a tailor-welded blank is performed. The position of welding lines on the initial blank is designed. The roll-back method can be applied to the design of the welding line position. 4. In most cases, the edge of blank takes the shape of the target contour within a few iterations, which shows that the roll-back method is an effective and convenient method for an optimum blank shape design. Fig. 26. Deformed shape of No. 2 member with the tailor-welded blank. Fig. 27. Deformed shape of No. 2 member with the tailor-welded blank: (a front view; (b rear view. tributed uniformly, most of the stretching being concentrated on the side of the blank with lower strength. The process condition without fracture should be determined for the combination of the drawing depth and the two different thickness as shown in Fig.28. References [1] V.V. Hasek, K. Lange, Use of slip line ®eld method in deep drawing of large irregular shaped components, Proceedings of the Seventh NAMRC, Ann Arbor, MI, 1979, pp. 65±71. [2] T. Jimma, Deep drawing convex polygon shell researches on the deep drawing of sheet metal by the slip line theory. First report, Jpn. Soc. Tech. Plasticity 11 (116 (1970 653±670. [3] M. Karima, Blank development and tooling design for drawn parts using a modi®ed slip line ®eld based approach, ASME Trans. 11 (1989 345±350. [4] J.H. Vogel, D. Lee, An analysis method for deep drawing process design, Int. J. Mech. Sci. 32 (1990 891. [5] X. Chen, R. Sowerby, The development of ideas blank shapes by the method of plane stress characteristics, Int. J. Mech. Sci. 34 (2 (1992159±166. [6] R. Sowerby, J.L. Duncan, E. Chu, The modelling of sheet metal stamping, Int. J. Mech. Sci. 28 (7 (1986 415±430. [7] S.A. Majlessi, D. Lee, Further development of sheet metal forming analysis method, ASME Trans. 109 (1987 330±337. [8] S.A. Majlessi, D. Lee, Development of multistage sheet metal forming analysis method, J. Mater. Shap. Technol. 6 (1 (1988 41± 54. [9] K. Chung, O. Richmond, Ideal forming-I. Homogeneous deformation with minimum plastic work, Int. J. Mech. Sci. 34 (7 (1992 575±591. [10] K. Chung, O. Richmond, Ideal forming-II. Sheet forming with optimum deformation, Int. J. Mech. Sci. 34 (8 (1992 617±633. Fig. 28. Thickness distribution with the tailor-welded blank (unit: mm: (a front view; (b rear view.J.-Y. Kim et al. / Journal of Materials Processing Technology 101 (2000 31±43 [11] K. Chung, O. Richmond, Sheet forming process design based on ideal forming theory, Proceedings of the Fourth International Conference on NUMIFORM, 1992, pp. 455±460.[12] K. Chung, O. Richmond, The mechanics of ideal forming, ASME Trans. 61 (1994 176±181. [13] C.H. Lee, H. Huh, Blank design and strain prediction of automobile stamping parts by and inverse ®nite element approach, J. Mater. Process. Technol. 63 (1997 645±650. [14] C.H. Toh, S. Kobayashi, Deformation analysis and blank design in square cup drawing, Int. J. Mech. Tool Des. Res. 25 (1 (1985 15± 32. 43 [15] Z. Zhatao, L. Bingwen, Determination of blank shapes for drawing irregular cups using and electrical analogue methods, Int. J. Mech. Sci. 28 (8 (1986 499±503. [16] H. Huh, S.S. Han, Analysis of square cup deep drawing from two types of blanks with a modi®ed membrane ®nite element method, Trans. KSME 18 (10 (1994 2653±2663. [17] C.H. Lee, H. Huh, Blank design and strain prediction in sheet metal forming process, Trans. KSME A 20 (6 (1996 1810±1818. [18] C.H. Lee, H. Huh, Three-dimensional multi-step inverse analysis for optimum design of initial blank in sheet metal forming, Trans. KSME A 21 (12 (1997 2055±2067.。
毕业设计外文翻译
毕业设计外文翻译Graduation design foreign translation (700 words)Title: The Application of Artificial Intelligence in Autonomous VehiclesIntroduction:With the advancement of artificial intelligence (AI) technology, the application of AI in autonomous vehicles has become a hot topic. Autonomous vehicles, also known as self-driving cars, are vehicles that can operate without human intervention. The integration of AI enables these vehicles to analyze and respond to their surroundings, making them more efficient and safe on the road. This paper will discuss the application of AI in autonomous vehicles and its potential benefits.Application of AI in Autonomous Vehicles:1. Computer Vision:AI technology enables autonomous vehicles to perceive their surroundings using computer vision. Cameras are installed on the vehicle to capture real-time visual data, which is then analyzed by AI algorithms. Through computer vision, autonomous vehicles can identify objects such as pedestrians, traffic lights, and other vehicles. This allows the vehicle to make informed decisions and act accordingly. For example, if a pedestrian is crossing the road, the autonomous vehicle can detect the presence of the pedestrian and adjust its speed or trajectory to avoid collision.2. Machine Learning:Machine learning algorithms are used to train autonomous vehiclesto make decisions based on various scenarios. By analyzing large amounts of data, the AI system can learn patterns and make predictions. Machine learning is particularly useful in autonomous vehicles because it allows them to adapt to changing environments and make real-time decisions. For example, if a road is under construction, the AI system can learn to navigate through alternative routes based on previous data.3. Sensor Fusion:Autonomous vehicles are equipped with various sensors such as LiDAR, radar, and ultrasound, which provide them with information about their surroundings. AI technology allows these sensors to work together and fuse the data to get a comprehensive view of the environment. Sensor fusion enables autonomous vehicles to have a more accurate perception of their surroundings and make more precise decisions. For example, if there is an obstacle ahead, the AI system can use data from multiple sensors to accurately determine the distance and make the appropriate response.Benefits of AI in Autonomous Vehicles:1. Safety:One of the main benefits of AI in autonomous vehicles is the improvement in road safety. AI algorithms can analyze real-time data and make split-second decisions, which reduces the risk of human error. Autonomous vehicles equipped with AI technology can identify potential risks on the road and take appropriate actions to avoid accidents.2. Efficiency:AI in autonomous vehicles can optimize driving routes, reduce congestion, and improve overall traffic flow. By analyzing traffic patterns and historical data, AI algorithms can suggest the most efficient routes for a given destination. This not only saves time for passengers but also reduces fuel consumption and environmental impact.Conclusion:The application of AI in autonomous vehicles holds great promise for the future of transportation. By leveraging AI technology, autonomous vehicles can improve safety, efficiency, and overall driving experience. However, there are still challenges to overcome, such as regulatory issues and public acceptance. Nonetheless, with further advancements in AI technology, autonomous vehicles are poised to revolutionize the way we commute and travel.。
毕业设计英语翻译全文
[1]. These brake systems use compressed air as the energy transmitting medium to actuate the foundation brakes mounted on the axles.The air brake system currently found in commercial vehicles is made up of two subsystems —the pneumatic subsystem and the mechanical subsystem. The pneumatic subsystem includes the compressor, storage reservoirs, treadle valve (or the brake application valve), brake lines, relay valves, quick release valve, brake chambers, etc. The mechanical subsystem starts from the brake chambers and includes push rods, slack adjusters, S-cams, brake pads and brake drums. One of the most important differences between a hydraulic brake system (found in passenger cars) and an air brake system is in their mode of operation. In a hydraulic brake system, the force applied by the driver on the brake pedal is transmitted through the brake fluid to the wheel cylinders mounted on the axles. The driver obtains a sensory feedback in the form of pressure on his/her foot. If there is a leak in the hydraulic brake system, this pressure will decrease and the driver can detect it through the relatively easy motion of the brake pedal. In an air brake system, the application of the brake pedal by the driver meters out compressed air from a supply reservoir to the brake chambers. The force applied by the driver on the brake pedal is utilized in opening certain ports in the treadle valve and is not used to pressurize air in the brake system. This leads to a lack of variation in the sensory feedback to the driver in the case of leaks, worn brake pads and other defects in the brake system.Air brake systems can degrade significantly with use and need periodic inspection and maintenance [2]. As a result, periodic maintenance inspections are performed by fleet owners and roadside enforcement inspections are carried out by state and federal inspection teams. The performance requirements of brakes in newly manufactured and “on-the-road”commercial vehicles in the United States are specified by the Federal Motor V ehicle Safety Standard (FMVSS) 121 [3]and the Federal Motor Carrier Safety Regulation (FMCSR) Part 393 [4], respectively. These regulations specify the stopping distance, deceleration and brake force that should be achieved when the vehicle is braked from an initial speed of 20 mph. Due to the difficulty in carrying out such tests on the road, equivalent methods have been developed to inspect the brake system. A chronology of the development of the various commercial vehicle brake testing procedures used in the United States can be found in [5].Inspection techniques that are currently used to monitor the air brake system can be broadly divided into two categories —“visual inspections”and “performance-based inspections”[6]. Visual inspections include observing the stroke of the push rod, thickness of the brake linings, checking for wear in other components and detecting leaks in the brake system through aural and tactile means. They are subjective, time-consuming and difficult on vehicles with a low ground clearance since an inspector has to go underneath a vehicle to check the brake system. In fact, the average time required for a typical current roadside inspection of a commercial vehicle is 30 min, with approximately half of the time spent on inspecting brakes [7]. Performance-based inspections involve the measurement of the braking force/torque, stopping distance, brake pad temperature, etc. A description of two performance-based brake testers —the roller dynamometer brake tester and the flat plate brake tester —and the associated failure criteria when an air brake system is tested with them can be found in [8]. It is appropriate to point out that, in an appraisal of the future needs of the trucking industry [9], the authors call for the development of improved methods of brake inspections.Also, in recent years, studies have been carried out to develop “Adaptive Cruise Control”(ACC)systems or “Autonomous Intelligent Cruise Control”(AICC) systems. The objective of these systems is to maintain a constant distance between two consecutive vehicles by mainly controlling the engine throttle and the brake system. While most of the research on ACC systems has focused on passenger cars, the benefits of implementing such systems on heavy trucks are significant [10].A typical ACC system for heavy trucks controls the engine throttle, the transmission and the brake system and will be interfaced with existing systems like the Antilock Braking System (ABS), Traction Control System (TCS), etc. A typical truck ABS monitors the speed of the wheels and modulates the brake system pressure in the event of an impending wheel lock-up [11]. The ABS consists of an Electronic Control Unit (ECU) that receives signals from the wheel speed sensors and processes this information to regulate the brake system pressure through modulator valves. It should be noted that ABS does not control the treadle valve to regulate the pressure in the brake system. It reduces the brake system pressure that is “commanded”by the driver when it senses an impending wheel lock-up. It cannot provide a higher pressure than that corresponding to the pedal input from the driver.It is important to note that the ABS modulates the brake system pressure only under conditions when a wheel lock-up is impending. The ABS is disengaged during “normal”braking operations. In fact, it has been pointed out in [12] that ABS is “passive during the vast majority of braking operations”. During such braking operations, the pressure of air in the brake system is the level that is commanded by the driver through the motion of the brake pedal. Hence, in order to implement ACC systems on commercial vehicles it is necessary to develop control schemes that will automatically regulate the brake system pressure during all braking operations.Motivated by the above issues, our overall objective is to develop model-based control and diagnostic systems for air brake systems. Such a model of the air brake system should correlate the pressure transients in all the brake chambers of the air brake system with the treadle valve plunger displacement (i.e., the displacement of the brake pedal) and the supply pressure of air provided from the reservoirs to the treadle and relay valves. We have already developed a model [13], and control and diagnostic schemes [14] and [15]based on this model, for the configuration of the air brake system where the primary circuit of the treadle valve is directly connected to one of the two front brake chambers. This model predicts the pressure transients in a front brake chamber during a given brake application with the input data being the treadle valve plunger displacement and the supply pressure to the treadle valve. In order to extend these control and diagnostic schemes, a model should be developed to predict the response of all the brake chambers in the air brake system. One of the steps involved in obtaining a model for the entire air brake system is to develop a model to predict the response of the relay valve, and this is the focus of this article.We will show in the subsequent sections that a relay valve has three phases (or modes) of operation and the evolution of pressure in each of the modes is different. The transition from one mode to another depends primarily on the pressure in the brake chamber and for this reason, it can be naturally modeled as a hybrid system.This article is organized as follows. In Section 2, we present a brief description of the air brake system and the experimental setup that has been constructed at Texas A&M University. A hybrid dynamical model of the relay valve to predict its pressure response is derived in Section 3. We present the equations governing the motion of the mechanical components in the relay valve and the flow of air in the system. This model is corroborated against experimental data and the resultsare provided in Section 4.2. A brief description of the air brake system and the experimental setupA layout of the air brake system found in a typical tractor is presented in Fig. 1. An engine-driven air compressor is used to compress air and the compressed air is collected in storage reservoirs. The pressure of the compressed air in the reservoirs is regulated by a governor. Compressed air is supplied from these reservoirs to the treadle and relay valves. The driver applies the brake by pressing the brake pedal on the treadle valve. This action meters the compressed air from the supply port of the treadle valve to its delivery port. Then, the compressed air travels from the delivery port of the treadle valve through air hoses to the relay valve (referred to as the service relay valve in Fig. 1) and the quick release valve and finally to the brake chambers mounted on the axles.Fig. 1. A general layout of a truck air brake system.View thumbnail imagesThe S-cam foundation brake, found in more than 85% of the air-braked vehicles in the United States [1], is illustrated in Fig. 2. Compressed air metered from the storage reservoirs enters the brake chamber and acts against the diaphragm, generating a force resulting in the motion of the push rod. The motion of the push rod serves to rotate, through the slack adjuster, a splined shaft on which a cam in the shape of an ‘S’is mounted. The ends of two brake shoes rest on the profile of the S-cam and the rotation of the S-cam pushes the brake shoes outwards so that the brake pads make contact with the rotating drum. This action results in the deceleration of the rotating drum. When the brake pedal is released by the driver, air is exhausted from the brake chamber and the push rod strokes back into the brake chamber thereby rotating the S-cam in the opposite direction. The contact between the brake pads and the drum is now broken and the brake is thus released.Fig. 2. The S-cam foundation brake.View thumbnail imagesA schematic of the experimental setup at Texas A&M University is provided in Fig. 3. Two “Type-20”brake chambers (having an effective cross-sectional area of 20 in2) are mounted on a front axle of a tractor and two “Type-30”brake chambers (having an effective cross-sectional area of 30 in2) are mounted on a fixture designed to simulate the rear axle of a tractor. The air supply to the system is provided by means of two compressors and storage reservoirs. The reservoirs are chosen such that their volume is more than twelve times the volume of the brake chambers that they provide air to, as required by the Federal Motor V ehicle Safety Standard (FMVSS) 121 [3]. Pressure regulators are mounted at the delivery ports of the reservoirs to control the supply pressure to the treadle valve and the relay valve. A cross-sectional view of the treadle valve used in the experiments is illustrated in Fig. 4. The treadle valve consists of two circuits —the primary circuit and the secondary circuit. The delivery port of the primary circuit is connected to the control port of the relay valve and the delivery ports of the relay valve are connected to the two rear brake chambers. The relay valve has a separate port for obtaining compressed air supply from the reservoir. The delivery port of the secondary circuit is connected to the Quick Release V alve (QRV) and the delivery ports of the QRV are connected to the two front brake chambers.Fig. 3. A schematic of the experimental facility.View thumbnail imagesFig. 4. A sectional view of the treadle valve.View thumbnail imagesThe treadle valve is actuated by means of a pneumatic actuator and compressed air is supplied to this actuator from the storage reservoirs through a pressure regulator. The displacement of the treadle valve plunger is measured by means of a displacement transducer. A pressure transducer is mounted at the entrance of each of the four brake chambers by means of a custom designed and fabricated pitot tube fixture. A displacement transducer is mounted on each of the two front brake chamber push rods through appropriately fabricated fixtures in order to measure the push rod stroke. All the transducers are interfaced with a connector block through shielded cables. The connector block is connected to a PCI-MIO-16E-4 Data Acquisition (DAQ) board [16] (mounted on a PCI slot inside a desktop computer) that collects the data during brake application and release. An application program is used to collect and store the data in the computer.3. Modeling the response of the relay valveIn this section, we shall present a description of the model of the relay valve. We adopt a lumped parameter approach in the development of this model. Friction at the sliding surfaces in the treadle and relay valves is neglected since they are well lubricated. The springs present in these valves have been experimentally found to be nearly linear in the range of their operation (except the rubber graduating spring used in the treadle valve, see Fig. 4) and the spring constants have been determined from experimental data. Other parameters such as areas, initial deflections, etc., are measured and used in the model.In this article, our objective is to develop a model for predicting the pressure transients in the rear brake chambers actuated by the relay valve during the brake application process. The relay valve is controlled by means of the compressed air delivered by the primary circuit of the treadle valve during a brake application. We shall consider the configuration of the brake system where the delivery port of the primary circuit of the treadle valve is connected to the control port of the relay valve. Compressed air is provided from the storage reservoirs to the relay valve at its supply port and one of the delivery ports of the relay valve is connected to a rear brake chamber. We shall measure the pressure transients at the primary delivery port of the treadle valve and in the rear brake chamber in our experiments. The pressure measured at the primary delivery port of the treadle valve will be provided as input to the numerical scheme that solves the model equations developed to predict the pressure transients in the rear brake chamber.When the driver presses the brake pedal, the primary piston in the treadle valve (see Fig. 4) first closes the primary exhaust port (by moving a distance equal to xpt) and then opens up the primary inlet port (xpp>xpt, xpp being the displacement of the primary piston from its initial position). This action serves to meter the compressed air from the reservoir to the primary delivery port. We shall refer to this phase as the “apply phase”. When the pressure in the primary circuit increases to a level such that it balances the force applied by the driver, the primary piston closes the primary inlet port with the exhaust port also remaining closed (xpp=xpt). We shall refer to this phase as the “hold phase”. When the driver releases the brake pedal, the primary piston return spring forces the primary piston to its initial position. This action opens the exhaust port (xpp<xpt) and air is exhausted from the primary delivery port to the atmosphere. We shall refer to this phase as the “exhaust phase”. A detailed derivation of the model of the treadle valve can be foundin [13].A schematic of the cross-sectional view of the relay valve used in our experimental setup is presented in Fig. 5. The compressed air from the delivery port of the primary circuit of the treadle valve enters the control port of the relay valve. The resulting force pushes the relay valve piston and the exhaust port of the relay valve is closed when the relay valve piston moves a distance equal to xrpt. Once the pre-loads on the relay valve assembly gasket are overcome, the inlet port of the relay valve is opened (xrpp>xrpt, xrpp being the displacement of the relay valve piston from its initial position). Compressed air is now metered from the supply port of the relay valve to its delivery port and subsequently to the rear brake chambers. This is the apply phase associated with the operation of the relay valve. When the pressure in the delivery port of the relay valve increases to a level such that it balances the forces acting on the relay valve piston due to the compressed air from the treadle valve, the inlet port of the relay valve is closed with its exhaust port also remaining closed (xrpp=xrpt). This is the hold phase associated with the operation of the relay valve. When the brake pedal is released by the driver, air is exhausted from the primary circuit of the treadle valve and consequently from the control port of the relay valve. Due to the presence of compressed air in the delivery port of the relay valve, the relay valve piston is pushed back to its initial position and this opens the exhaust port of the relay valve (xrpp<xrpt). Thus, air is exhausted from the delivery port of the relay valve to the atmosphere. This is the exhaust phase associated with the operation of the relay valve.Fig. 5. A sectional view of the relay valve.View thumbnail imagesThe equation of motion governing the mechanics of the operation of the relay valve piston and the relay valve assembly gasket during the apply and the hold phases is given by(1)where Mrpp and Mrv denote respectively the mass of the relay valve piston and the relay valve assembly gasket, xrpp denotes the displacement of the relay valve piston from its initial position, xrpt is the distance traveled by the relay valve piston before it closes the relay valve exhaust port, Krv is the spring constant of the relay valve assembly return spring, Fkrvi is the pre-load on the same, Arpp is the net area of the relay valve piston exposed to the pressurized air at the control port of the relay valve, Arpp1 is the net area of the relay valve piston exposed to the pressurized air at the delivery port of the relay valve, Arpp2 is the net area of the relay valve piston exposed to the exhaust port of the relay valve, Arv1 is the net cross-sectional area of the relay valve assembly gasket exposed to the pressurized air at the supply port of the relay valve, Arv2 is the net cross-sectional area of the relay valve assembly gasket exposed to the pressurized air at the delivery port of the relay valve, Ppd is the pressure of air at the delivery port of the primary circuit of the treadle valve, Prs is the pressure of air being supplied to the relay valve, Prd is the pressure of air at the delivery port of the relay valve and is the atmospheric pressure.The mass of the relay valve piston is of the order of around 0.1 kg and the magnitude of the spring and pressure forces is found to be of the order of 102 N. Thus, the acceleration required for the inertial forces to be comparable with the spring force and the pressure force terms has to be of theorder of 102–103 m/s2, which is not the case. Hence the inertial forces are neglected and the above equation reduces to(2)The equation of motion of the relay valve piston during the exhaust phase is given by(3)Neglecting inertial forces, the above equation reduces to(4)PpdArpp=Prd(Arpp1+Arpp2).Next, we will consider the flow of air in the portion of the brake system under study. The relay valve opening is modeled as a nozzle. For the flow through a restriction, if the ratio of the cross-sectional area of the upstream section to the cross-sectional area of the restriction is 4.4 or higher, the approach velocity to this restriction can be neglected and the upstream properties (such as pressure, enthalpy, temperature, etc.) can be taken to be the upstream total or stagnation properties [17]. In our case, the minimum ratio of the cross-sectional area of the supply chamber of the relay valve to the cross-sectional area of the relay valve opening (the restriction) is found to be more than this value. Hence, we can consider the valve opening as a nozzle and take the properties in the supply chamber of the valve as the stagnation properties at the inlet section of the nozzle. The flow through the nozzle is assumed to be one-dimensional and isentropic. We also assume that the fluid properties are uniform at all sections in the nozzle. Air is assumed to behave like an ideal gas with constant specific heats. Under the above assumptions, the part of the pneumatic subsystem under consideration can be visualized as illustrated in Fig. 6.Fig. 6. The simplified visualization of the pneumatic subsystem under consideration.View thumbnail imagesThe energy equation for the flow of air through the nozzle under the above assumptions can be written as [18](5)where ho is the specific stagnation enthalpy at the entrance section of the nozzle, h is the specific enthalpy at the exit section of the nozzle and u is the magnitude of the velocity of air at the exit section of the nozzle.For isentropic flow of an ideal gas with constant specific heats, the pressure (P), density (ρ) and temperature (T) are related by(6)where γis the ratio of specific heats.The mass flow rate of air from the relay valve opening at any instant of time (denoted by ) isgiven bywhere Ap is the cross-sectional area of the valve opening. This is the rate at which air is accumulating in the hoses and the brake chamber once the relay valve is actuated. Since we lump the properties of air inside the hose and the brake chamber, the mass of air in the brake chamber at any instant of time is obtained from the ideal gas equation of state as(8)where Vb is the volume of air in the brake chamber and Trd is the temperature of air in the brake chamber at that instant of time.Let us now consider the mechanics of the operation of the brake chamber. A cross-sectional view of the brake chamber is shown in Fig. 7. When the brake is applied, the brake chamber diaphragm starts to move only after a minimum threshold pressure is reached. This pressure is required to overcome the pre-loads on the diaphragm. When this pressure is attained in the brake chamber, the diaphragm moves such that the push rod is pushed out of the brake chamber. Once the brake pads contact the brake drum and steady state is reached, the volume of air in the brake chamber will be the maximum during that particular brake application. Thus, the volume of air in the brake chamber at any instant of time during the brake application process is given by(9)where V o1 is the initial volume of air in the brake chamber before the application of the brake, V o2 is the maximum volume of air in the brake chamber, Ab is the cross-sectional area of the brake chamber, xb is the displacement of the brake chamber diaphragm, i.e., the stroke of the push rod, and xbmax is the maximum stroke of the push rod.Fig. 7. A sectional view of the brake chamber.View thumbnail imagesIn our current experimental setup, the rear brake chambers are mounted on a fixture and the end of the push rod outside the brake chamber is not connected to a slack adjuster. The push rod is brought to rest during a given brake application when it strikes a plate mounted with its face perpendicular to the direction of motion of the push rod. The position of this plate can be adjusted to vary the push rod stroke. Hence, a reasonable model for the brake chamber is given by(10)where Mb is the mass of the brake chamber diaphragm, Kb is the spring constant of the brake chamber return spring and Fkbi is the pre-load on the brake chamber diaphragm return spring. It should be noted that the pressure of air in the rear brake chamber at any instant of time is assumed to be the same as the pressure of air at the delivery port of the relay valve at that instant of time. Neglecting inertial forces when compared to the force due to the pressure and spring forces, the above equation reduces toIn the case of a brake chamber mounted on an actual axle, the relationship between the push rod stroke and the brake chamber pressure has been found to be different than the one given by Eq.(11) due to the presence of additional components such as the slack adjuster, S-cam, brake pads and brake drum [15]. Thus, the model relating the push rod stroke and the brake chamber pressure for a rear brake chamber mounted on an actual rear axle should be developed as described in [15]. Differentiating Eq. (8) with respect to time and comparing the result with Eq. (7), and using Eqs.(5), (6), (9) and (11), we obtain the equation describing the pressure response of the relay valve during the apply and hold phases as(12)where Trs is the temperature of the air being supplied to the relay valve, CD is the discharge coefficient, R is the specific heat of air, γis the ratio of specific heats of air (both R and γare assumed to be constants) and(13)Ap=2πrrv(xrpp−xrpt),with rrv being the external radius of the relay valve inlet section. The discharge coefficient (CD) is used in order to compensate for the losses during the flow. Due to the complexity involved in calibrating the valve to determine the value of the discharge coefficient, we assumed a value of 0.82 for CD as recommended in [17]. The pressure transients in the brake chamber during the apply and hold phases are obtained by solving Eqs. (2) and (12) along with the initial condition that at the start of a given brake application, the brake chamber pressure is equal to the atmospheric pressure.4. Corroboration of the modelIn this section, we corroborate the model for the relay valve by comparing its predictions against experimental data obtained from various test runs carried out over a range of supply pressures. It should be noted that the typical supply pressure in air brake systems is usually between 825.3 kPa (105 psig) and 928.8 kPa (120 psig) and this is the pressure range provided by the compressor used in our experimental setup. Eqs. (2) and (12) are solved numerically to obtain the pressure transients in the rear brake chamber during the apply and hold phases of a given brake application. The pressure measured at the delivery port of the primary circuit of the treadle valveis given as the input data to the numerical scheme. The prediction of the model for a test run is compared with the data collected during that test run and the results from various test runs are presented in Fig. 8, Fig. 9, Fig. 10, Fig. 11 and Fig. 12. In these figures, time (in seconds) and brake chamber pressure (in Pa) have been plotted on the abscissa and the ordinate respectively. The value corresponds to that instant of time at which the computer program for collecting the data is started.Fig. 8. Pressure transients at 653 kPa (80 psig) supply pressure —apply phase.View thumbnail imagesFig. 9. Pressure transients at 722 kPa (90 psig) supply pressure —apply phase.View thumbnail imagesFig. 10. Pressure transients at 584 kPa (70 psig) supply pressure —apply and exhaust phases. View thumbnail imagesFig. 11. Pressure transients at 653 kPa (80 psig) supply pressure —apply and exhaust phases. View thumbnail imagesFig. 12. Pressure transients at 584 kPa (70 psig) supply pressure —repeated application.View thumbnail imagesIt can be observed from these figures that the model is able to predict the beginning and end of each brake application reasonably well. The steady state brake chamber pressure is also predicted well by the model in all the cases. The model has also captured the pressure transients well in the exhaust phase during a complete brake application and release cycle as shown in Fig. 10 and Fig. 11. It has also predicted the pressure transients well in the case of repeated brake applications as can be observed from Fig. 12.5. ConclusionsIn this article, we have developed a hybrid model for predicting the response of the relay valve used in air brake systems of commercial vehicles. The relay valve is actuated by the compressed air from the delivery port of the primary circuit of the treadle valve. We have presented the main governing equations for the pressure transients in a rear brake chamber attached to a delivery port of the relay valve. We have corroborated this model using data obtained from experimental test runs performed over a range of supply pressures. We plan to incorporate this model of the relay valve into an overall model of the air brake system which can be used in control and diagnostic applications.References[1]S.F. Williams, R.R. Knipling, Automatic slack adjusters for heavy vehicle air brake systems, Tech. Rep. DOT HS 807 724, National Highway Traffic Safety Administration, Washington, D. C., February 1991。
毕业设计文献翻译
毕业设计文献翻译Graduation Project Literature Translation (700 words)Title: The Impact of Artificial Intelligence on Job MarketWith the rapid development of technology, artificial intelligence (AI) has become a hot topic in recent years. AI has the potential to greatly affect the job market, leading to concerns about unemployment and job displacement. This paper aims to explore the impact of AI on the job market and provide insights into potential solutions.AI technology has advanced rapidly in recent years, making significant progress in various fields, such as voice recognition, image analysis, and data processing. As AI continues to improve, it has the potential to automate many tasks that are currently performed by humans. This automation could result in job displacement, particularly for routine and repetitive tasks.Studies have shown that AI could impact various industries, including transportation, healthcare, finance, and manufacturing. For example, AI-powered self-driving vehicles could potentially eliminate the need for human drivers, leading to job losses in the transportation industry. In the healthcare sector, AI algorithms can analyze medical images and help with diagnosis, potentially reducing the need for radiologists. Similar automation scenarios can be seen in other industries as well.While concerns about job displacement are valid, it is important to note that AI technology also has the potential to create new jobopportunities. As automation takes over routine and repetitive tasks, humans can focus on more complex and creative roles. AI can augment human intelligence, assisting professionals in decision-making processes and enhancing overall productivity.To mitigate the negative impact of AI on the job market, policymakers and businesses must take proactive measures. One approach is to invest in retraining and reskilling programs to equip workers with the necessary skills for the digital age. By providing training in AI-related fields, individuals can adapt to the changing job market and find new employment opportunities.Additionally, collaboration between AI technology developers and industries can help create AI applications that work alongside humans, rather than replacing them. Human-AI collaboration can enhance efficiency and productivity, allowing humans to leverage AI technology to perform tasks more effectively.Moreover, governments should establish policies that encourage innovation and entrepreneurship. By fostering a supportive environment for startups and small businesses, new job opportunities can be generated. Encouraging the development of AI-related industries can also lead to job creation.In conclusion, the impact of AI on the job market is a topic of significant concern. While automation may lead to job displacement, it can also create new job opportunities. To mitigate the negative impact, investment in retraining programs and fostering collaboration between AI technology and humans are crucial. Additionally, government policies that support innovationand entrepreneurship can help create a sustainable job market in the era of artificial intelligence.。
毕业设计中英文翻译
Integrated circuitAn integrated circuit or monolithic integrated circuit (also referred to as IC, chip, or microchip) is an electronic circuit manufactured by the patterned diffusion of trace elements into the surface of a thin substrate of semiconductor material. Additional materials are deposited and patterned to form interconnections between semiconductor devices.Integrated circuits are used in virtually all electronic equipment today and have revolutionized the world of electronics. Computers, mobile phones, and other digital appliances are now inextricable parts of the structure of modern societies, made possible by the low cost of production of integrated circuits.IntroductionICs were made possible by experimental discoveries showing that semiconductor devices could perform the functions of vacuum tubes and by mid-20th-century technology advancements in semiconductor device fabrication. The integration of large numbers of tiny transistors into a small chip was an enormous improvement over the manual assembly of circuits using discrete electronic components. The integrated circuit's mass production capability, reliability, and building-block approach tocircuit design ensured the rapid adoption of standardized ICs in place of designs using discrete transistors.There are two main advantages of ICs over discrete circuits: cost and performance. Cost is low because the chips, with all their components, are printed as a unit by photolithography rather than being constructed one transistor at a time. Furthermore, much less material is used to construct a packaged IC than to construct a discrete circuit. Performance is high because the components switch quickly and consume little power (compared to their discrete counterparts) as a result of the small size and close proximity of the components. As of 2006, typical chip areas range from a few square millimeters to around 350 mm2, with up to 1 million transistors per mm2.TerminologyIntegrated circuit originally referred to a miniaturized electronic circuit consisting of semiconductor devices, as well as passive components bonded to a substrate or circuit board.[1] This configuration is now commonly referred to as a hybrid integrated circuit. Integrated circuit has since come to refer to the single-piece circuit construction originally known as a monolithic integrated circuit.[2]InventionEarly developments of the integrated circuit go back to 1949, when the German engineer Werner Jacobi (Siemens AG) filed a patent for an integrated-circuit-like semiconductor amplifying device showing five transistors on a common substrate arranged in a 2-stage amplifier arrangement. Jacobi disclosed small and cheap hearing aids as typical industrial applications of his patent. A commercial use of his patent has not been reported.The idea of the integrated circuit was conceived by a radar scientist working for the Royal Radar Establishment of the British Ministry of Defence, Geoffrey W.A. Dummer (1909–2002). Dummer presented the idea to the public at the Symposium on Progress in Quality Electronic Components in Washington, D.C. on May 7, 1952.[4] He gave many sympodia publicly to propagate his ideas, and unsuccessfully attempted to build such a circuit in 1956.A precursor idea to the IC was to create small ceramic squares (wafers), each one containing a single miniaturized component. Components could then be integrated and wired into a tridimensional or tridimensional compact grid. This idea, which looked very promising in 1957, was proposed to the US Army by Jack Kilby, and led to the short-lived Micro module Program. However, as the project was gaining momentum, Jack Kilby came up with a new, revolutionary design: the IC.Newly employed by Texas Instruments, Jack Kilby recorded his initial ideas concerning the integrated circuit in July 1958, successfully demonstrating the first working integrated example on September 12, 1958.In his patent application of February 6, 1959, Jack Kilby described his new device as ―a body of semiconductor material ... wherein all the components of the electronic circuit are completely integrated.‖Jack Kilby won the 2000 Nobel Prize in Physics for his part of the invention of the integrated circuit.Jack Kilby's work was named an IEEE Milestone in 2009.Noyce also came up with his own idea of an integrated circuit half a year later than Jack Kilby. His chip solved many practical problems that Jack Kilby's had not. Produced at Fairchild Semiconductor, it was made of silicon, whereas Jack Kilby chip was made of germanium. GenerationsIn the early days of integrated circuits, only a few transistors could be placed on a chip, as the scale used was large because of the contemporary technology, and manufacturing yields were low by today's standards. As the degree of integration was small, the design was done easily. Over time, millions, and today billions of transistors could be placed on one chip, and to make a good design became a task to be planned thoroughly. This gave rise to new design methods.SSI, MSI and LSIThe first integrated circuits contained only a few transistors. Called "small-scale integration" (SSI), digital circuits containing transistors numbering in the tens for example, while early linear ICs such as the Plessey SL201 or the Philips TAA320 had as few as two transistors. The term Large Scale Integration was first used by IBM scientist Rolf Landauer when describing the theoretical concept, from there came the terms for SSI, MSI, VLSI, and ULSI.SSI circuits were crucial to early aerospace projects, and aerospace projects helped inspire development of the technology. Both the Minuteman missile and Apollo program needed lightweight digital computers for their inertial guidance systems; the Apollo guidance computer led and motivated the integrated-circuit technology,while the Minuteman missile forced it into mass-production. The Minuteman missile program and various other Navy programs accounted for the total $4 million integrated circuit market in 1962, and by 1968, U.S. Government space and defense spending still accounted for 37% of the $312 million total production. The demand by the U.S. Government supported the nascent integrated circuit market until costs fell enough to allow firms to penetrate the industrial and eventually the consumer markets. The average price per integrated circuit dropped from $50.00 in1962 to $2.33 in 1968.[13] Integrated circuits began to appear in consumer products by the turn of the decade, a typical application being FMinter-carrier sound processing in television receivers.The next step in the development of integrated circuits, taken in the late 1960s, introduced devices which contained hundreds of transistors on each chip, called "medium-scale integration" (MSI).They were attractive economically because while they cost little more to produce than SSI devices, they allowed more complex systems to be produced using smaller circuit boards, less assembly work (because of fewer separate components), and a number of other advantages.Further development, driven by the same economic factors, led to "large-scale integration" (LSI) in the mid 1970s, with tens of thousands of transistors per chip.Integrated circuits such as 1K-bit RAMs, calculator chips, and the first microprocessors, that began to be manufactured in moderate quantities in the early 1970s, had under 4000 transistors. True LSI circuits, approaching 10,000 transistors, began to be produced around 1974, for computer main memories and second-generation microprocessors.VLSIThe final step in the development process, starting in the 1980s and continuing through the present, was "very large-scale integration" (VLSI). The development started with hundreds of thousands of transistors in the early 1980s, and continues beyond several billion transistors as of 2009. Multiple developments were required to achieve this increased density. Manufacturers moved to smaller design rules and cleaner fabrication facilities, so that they could make chips with more transistors and maintain adequate yield. The path of process improvements was summarized by the International Technology Roadmap for Semiconductors (ITRS). Design tools improved enough to make it practical to finish these designs in a reasonable time. The more energy efficient CMOS replaced NMOS and PMOS, avoiding a prohibitive increase in power consumption. Better texts such as the landmark textbook by Mead and Conway helped schools educate more designers, among other factors.In 1986 the first one megabit RAM chips were introduced, which contained more than one million transistors. Microprocessor chips passed the million transistor mark in 1989 and the billion transistor mark in 2005.[14] The trend continues largely unabated, with chips introduced in 2007 containing tens of billions of memory transistors.[15]ULSI, WSI, SOC and 3D-ICTo reflect further growth of the complexity, the term ULSI that stands for "ultra-large-scale integration" was proposed for chips of complexityof more than 1 million transistors.Wafer-scale integration (WSI) is a system of building very-large integrated circuits that uses an entire silicon wafer to produce a single "super-chip". Through a combination of large size and reduced packaging, WSI could lead to dramatically reduced costs for some systems, notably massively parallel supercomputers. The name is taken from the term Very-Large-Scale Integration, the current state of the art when WSI was being developed.A system-on-a-chip (SoC or SOC) is an integrated circuit in which all the components needed for a computer or other system are included on a single chip. The design of such a device can be complex and costly, and building disparate components on a single piece of silicon may compromise the efficiency of some elements. However, these drawbacks are offset by lower manufacturing and assembly costs and by a greatly reduced power budget: because signals among the components are kept on-die, much less power is required (see Packaging).A three-dimensional integrated circuit (3D-IC) has two or more layers of active electronic components that are integrated both vertically and horizontally into a single circuit. Communication between layers useson-die signaling, so power consumption is much lower than in equivalent separate circuits. Judicious use of short vertical wires can substantially reduce overall wire length for faster operation.Advances in integrated circuitsAmong the most advanced integrated circuits are the microprocessors or "cores", which control everything from computers and cellular phones to digital microwave ovens. Digital memory chips and ASICs are examples of other families of integrated circuits that are important to the modern information society. While the cost of designing and developing a complex integrated circuit is quite high, when spread across typically millions of production units the individual IC cost is minimized. The performance of ICs is high because the small size allows short traces which in turn allows low power logic (such as CMOS) to be used at fast switching speeds.ICs have consistently migrated to smaller feature sizes over the years, allowing more circuitry to be packed on each chip. This increased capacity per unit area can be used to decrease cost and/or increase functionality—see Moore's law which, in its modern interpretation, states that the number of transistors in an integrated circuit doubles every two years. In general, as the feature size shrinks, almost everything improves—the cost per unit and the switching power consumption godown, and the speed goes up. However, ICs with nanometer-scale devices are not without their problems, principal among which is leakage current (see subthreshold leakage for a discussion of this), although these problems are not insurmountable and will likely be solved or at least ameliorated by the introduction of high-k dielectrics. Since these speed and power consumption gains are apparent to the end user, there is fierce competition among the manufacturers to use finer geometries. This process, and the expected progress over the next few years, is well described by the International Technology Roadmap for Semiconductors (ITRS).In current research projects, integrated circuits are also developed for sensoric applications in medical implants or other bioelectronic devices. Particular sealing strategies have to be taken in such biogenic environments to avoid corrosion or biodegradation of the exposed semiconductor materials.[16] As one of the few materials well established in CMOS technology, titanium nitride (TiN) turned out as exceptionally stable and well suited for electrode applications in medical implants.[17][18] ClassificationIntegrated circuits can be classified into analog, digital and mixed signal (both analog and digital on the same chip).Digital integrated circuits can contain anything from one to millions of logic gates, flip-flops, multiplexers, and other circuits in a few square millimeters. The small size of these circuits allows high speed, low power dissipation, and reduced manufacturing cost compared with board-level integration. These digital ICs, typically microprocessors, DSPs, and micro controllers, work using binary mathematics to process "one" and "zero" signals.Analog ICs, such as sensors, power management circuits, and operational amplifiers, work by processing continuous signals. They perform functions like amplification, active filtering, demodulation, and mixing. Analog ICs ease the burden on circuit designers by having expertly designed analog circuits available instead of designing a difficult analog circuit from scratch.ICs can also combine analog and digital circuits on a single chip to create functions such as A/D converters and D/A converters. Such circuits offer smaller size and lower cost, but must carefully account for signal interference.ManufacturingFabricationRendering of a small standard cell with three metal layers (dielectric has been removed). The sand-colored structures are metal interconnect, with the vertical pillars being contacts, typically plugs of tungsten. The reddish structures are poly-silicon gates, and the solid at the bottom is the crystalline silicon bulk.Schematic structure of a CMOS chip, as built in the early 2000s. The graphic shows LDD-Misfit's on an SOI substrate with five materialization layers and solder bump for flip-chip bonding. It also shows the section for FEOL (front-end of line), BEOL (back-end of line) and first parts of back-end process.The semiconductors of the periodic table of the chemical elements were identified as the most likely materials for a solid-state vacuum tube. Starting with copper oxide, proceeding to germanium, then silicon, the materials were systematically studied in the 1940s and 1950s. Today, silicon monocrystals are the main substrate used for ICs although someIII-V compounds of the periodic table such as gallium arsenide are used for specialized applications like LEDs, lasers, solar cells and the highest-speed integrated circuits. It took decades to perfect methods of creating crystals without defects in the crystalline structure of the semiconducting material.Semiconductor ICs are fabricated in a layer process which includes these key process steps:∙Imaging∙Deposition∙EtchingThe main process steps are supplemented by doping and cleaning.∙Integrated circuits are composed of many overlapping layers, each defined by photolithography, and normally shown in different colors.Some layers mark where various dopants are diffused into thesubstrate (called diffusion layers), some define where additional ions are implanted (implant layers), some define the conductors(poly-silicon or metal layers), and some define the connectionsbetween the conducting layers (via or contact layers). All components are constructed from a specific combination of these layers.∙In a self-aligned CMOS process, a transistor is formed wherever the gate layer (poly-silicon or metal) crosses a diffusion layer.∙Capacitive structures, in form very much like the parallel conducting plates of a traditional electrical capacitor, are formedaccording to the area of the "plates", with insulating material between the plates. Capacitors of a wide range of sizes are common on ICs.∙Meandering stripes of varying lengths are sometimes used to form on-chip resistors, though most logic circuits do not need any resistors.The ratio of the length of the resistive structure to its width, combined with its sheet resistivity, determines the resistance.∙More rarely, inductive structures can be built as tiny on-chip coils, or simulated by gyrators.Since a CMOS device only draws current on the transition between logic states, CMOS devices consume much less current than bipolar devices.A random access memory is the most regular type of integrated circuit; the highest density devices are thus memories; but even a microprocessor will have memory on the chip. (See the regular array structure at the bottom of the first image.) Although the structures are intricate – with widths which have been shrinking for decades – the layers remain much thinner than the device widths. The layers of material are fabricated much like a photographic process, although light waves in the visible spectrum cannot be used to "expose" a layer of material, as they would be too large for the features. Thus photons of higher frequencies (typically ultraviolet) are used to create the patterns for each layer. Because each feature is so small, electron microscopes are essential tools for a process engineer who might be debugging a fabrication process.Each device is tested before packaging using automated test equipment (ATE), in a process known as wafer testing, or wafer probing. The wafer is then cut into rectangular blocks, each of which is called a die. Each good die (plural dice, dies, or die) is then connected into a package using aluminum (or gold) bond wires which are welded and/or thermosonic bonded to pads, usually found around the edge of the die. After packaging, the devices go through final testing on the same or similar ATE used during wafer probing. Industrial CT scanning can also be used. Test cost can account for over 25% of the cost of fabrication on lower cost products, but can be negligible on low yielding, larger, and/or higher cost devices.As of 2005, a fabrication facility (commonly known as a semiconductor fab) costs over $1 billion to construct,[19] because much of the operation is automated. Today, the most advanced processes employ the following techniques:∙The wafers are up to 300 mm in diameter (wider than a common dinner plate).∙Use of 32 nanometer or smaller chip manufacturing process. Intel, IBM, NEC, and AMD are using ~32 nanometers for their CPU chips.IBM and AMD introduced immersion lithography for their 45 nmprocesses[20]∙Copper interconnects where copper wiring replaces aluminium for interconnects.∙Low-K dielectric insulators.∙Silicon on insulator (SOI)∙Strained silicon in a process used by IBM known as strained silicon directly on insulator (SSDOI)∙Multigate devices such as trin-gate transistors being manufactured by Intel from 2011 in their 22 nim process.PackagingIn the late 1990s, plastic quad flat pack (PQFP) and thin small-outline package (TSOP) packages became the most common for high pin count devices, though PGA packages are still often used for high-end microprocessors. Intel and AMD are currently transitioning from PGA packages on high-end microprocessors to land grid array (LGA) packages.Ball grid array (BGA) packages have existed since the 1970s. Flip-chip Ball Grid Array packages, which allow for much higher pin count than other package types, were developed in the 1990s. In an FCBGA package the die is mounted upside-down (flipped) and connects to the packageballs via a package substrate that is similar to a printed-circuit board rather than by wires. FCBGA packages allow an array of input-output signals (called Area-I/O) to be distributed over the entire die rather than being confined to the die periphery.Traces out of the die, through the package, and into the printed circuit board have very different electrical properties, compared to on-chip signals. They require special design techniques and need much more electric power than signals confined to the chip itself.When multiple dies are put in one package, it is called SiP, for System In Package. When multiple dies are combined on a small substrate, often ceramic, it's called an MCM, or Multi-Chip Module. The boundary between a big MCM and a small printed circuit board is sometimes fuzzy. Chip labeling and manufacture dateMost integrated circuits large enough to include identifying information include four common sections: the manufacturer's name or logo, the part number, a part production batch number and/or serial number, and a four-digit code that identifies when the chip was manufactured. Extremely small surface mount technology parts often bear only a number used in a manufacturer's lookup table to find the chip characteristics.The manufacturing date is commonly represented as a two-digit year followed by a two-digit week code, such that a part bearing the code 8341 was manufactured in week 41 of 1983, or approximately in October 1983. Legal protection of semiconductor chip layoutsLike most of the other forms of intellectual property, IC layout designs are creations of the human mind. They are usually the result of an enormous investment, both in terms of the time of highly qualified experts, and financially. There is a continuing need for the creation of new layout-designs which reduce the dimensions of existing integrated circuits and simultaneously increase their functions. The smaller an integrated circuit, the less the material needed for its manufacture, and the smaller the space needed to accommodate it. Integrated circuits are utilized in a large range of products, including articles of everyday use, such as watches, television sets, washing machines, automobiles, etc., as well as sophisticated data processing equipment.The possibility of copying by photographing each layer of an integrated circuit and preparing photomasks for its production on the basis of the photographs obtained is the main reason for the introduction of legislation for the protection of layout-designs.A diplomatic conference was held at Washington, D.C., in 1989, which adopted a Treaty on Intellectual Property in Respect of Integrated Circuits (IPIC Treaty). The Treaty on Intellectual Property in respect of Integrated Circuits, also called Washington Treaty or IPIC Treaty (signed at Washington on May 26, 1989) is currently not in force, but was partially integrated into the TRIPs agreement.National laws protecting IC layout designs have been adopted in a number of countries.Other developmentsIn the 1980s, programmable logic devices were developed. These devices contain circuits whose logical function and connectivity can be programmed by the user, rather than being fixed by the integrated circuit manufacturer. This allows a single chip to be programmed to implement different LSI-type functions such as logic gates, adders and registers. Current devices called field-programmable gate arrays can now implement tens of thousands of LSI circuits in parallel and operate up to 1.5 GHz (Anachronism holding the speed record).The techniques perfected by the integrated circuits industry over the last three decades have been used to create very small mechanical devices driven by electricity using a technology known asmicroelectromechanical systems. These devices are used in a variety of commercial and military applications. Example commercial applications include DLP projectors, inkjet printers, and accelerometers used to deploy automobile airbags.In the past, radios could not be fabricated in the same low-cost processes as microprocessors. But since 1998, a large number of radio chips have been developed using CMOS processes. Examples include Intel's DECT cordless phone, or Atheros's 802.11 card.Future developments seem to follow the multi-coremulti-microprocessor paradigm, already used by the Intel and AMD dual-core processors. Intel recently unveiled a prototype, "not for commercial sale" chip that bears 80 microprocessors. Each core is capable of handling its own task independently of the others. This is in response to the heat-versus-speed limit that is about to be reached using existing transistor technology. This design provides a new challenge to chip programming. Parallel programming languages such as theopen-source X10 programming language are designed to assist with this task.集成电路集成电路或单片集成电子电路(也称为IC、集成电路片或微型集成电路片)是一种电子电路制作的图案扩散微量元素分析在基体表面形成一层薄的半导体材料。
毕业设计中英文翻译

Bridge Waterway OpeningsIn a majority of cases the height and length of a bridge depend solely upon the amount of clear waterway opening that must be provided to accommodate the floodwaters of the stream. Actually, the problem goes beyond that of merely accommodating the floodwaters and requires prediction of the various magnitudes of floods for given time intervals. It would be impossible to state that some given magnitude is the maximum that will ever occur, and it is therefore impossible to design for the maximum, since it cannot be ascertained. It seems more logical to design for a predicted flood of some selected interval ---a flood magnitude that could reasonably be expected to occur once within a given number of years. For example, a bridge may be designed for a 50-year flood interval; that is, for a flood which is expected (according to the laws of probability) to occur on the average of one time in 50 years. Once this design flood frequency, or interval of expected occurrence, has been decided, the analysis to determine a magnitude is made. Whenever possible, this analysis is based upon gauged stream records. In areas and for streams where flood frequency and magnitude records are not available, an analysis can still be made. With data from gauged streams in the vicinity, regional flood frequencies can be worked out; with a correlation between the computed discharge for the ungauged stream and the regional flood frequency, a flood frequency curve can be computed for the stream in question. Highway CulvertsAny closed conduit used to conduct surface runoff from one side of a roadway to the other is referred to as a culvert. Culverts vary in size from large multiple installations used in lieu of a bridge to small circular or elliptical pipe, and their design varies in significance. Accepted practice treats conduits under the roadway as culverts. Although the unit cost of culverts is much less than that of bridges, they are far more numerous, normally averaging about eight to the mile, and represent a greater cost in highway. Statistics show that about 15 cents of the highway construction dollar goes to culverts, as compared with 10 cents for bridge. Culvert design then is equally as important as that of bridges or other phases of highway and should be treated accordingly.Municipal Storm DrainageIn urban and suburban areas, runoff waters are handled through a system of drainage structures referred to as storm sewers and their appurtenances. The drainage problem is increased in these areas primarily for two reasons: the impervious nature of the area creates a very high runoff; and there is little room for natural water courses. It is often necessary to collect the entire storm water into a system of pipes and transmit it over considerable distances before it can be loosed again as surface runoff. This collection and transmission further increase the problem, since all of the water must be collected with virtually no ponding, thus eliminating any natural storage; and though increased velocity the peak runoffs are reached more quickly. Also, the shorter times of peaks cause the system to be more sensitive to short-duration, high-intensity rainfall. Storm sewers, like culverts and bridges, are designed for storms of various intensity –return-period relationship, depending upon the economy and amount of ponding that can be tolerated.Airport DrainageThe problem of providing proper drainage facilities for airports is similar in many ways to that of highways and streets. However, because of the large and relatively flat surface involved the varying soil conditions, the absence of natural water courses and possible side ditches, and the greater concentration of discharge at the terminus of the construction area, some phases of the problem are more complex. For the average airport the overall area to be drained is relatively large and an extensive drainage system is required. The magnitude of such a system makes it even more imperative that sound engineeringprinciples based on all of the best available data be used to ensure the most economical design. Overdesign of facilities results in excessive money investment with no return, and underdesign can result in conditions hazardous to the air traffic using the airport.In other to ensure surfaces that are smooth, firm, stable, and reasonably free from flooding, it is necessary to provide a system which will do several things. It must collect and remove the surface water from the airport surface; intercept and remove surface water flowing toward the airport from adjacent areas; collect and remove any excessive subsurface water beneath the surface of the airport facilities and in many cases lower the ground-water table; and provide protection against erosion of the sloping areas. Ditches and Cut-slope DrainageA highway cross section normally includes one and often two ditches paralleling the roadway. Generally referred to as side ditches these serve to intercept the drainage from slopes and to conduct it to where it can be carried under the roadway or away from the highway section, depending upon the natural drainage. To a limited extent they also serve to conduct subsurface drainage from beneath the roadway to points where it can be carried away from the highway section.A second type of ditch, generally referred to as a crown ditch, is often used for the erosion protection of cut slopes. This ditch along the top of the cut slope serves to intercept surface runoff from the slopes above and conduct it to natural water courses on milder slopes, thus preventing the erosion that would be caused by permitting the runoff to spill down the cut faces.12 Construction techniquesThe decision of how a bridge should be built depends mainly on local conditions. These include cost of materials, available equipment, allowable construction time and environmental restriction. Since all these vary with location and time, the best construction technique for a given structure may also vary. Incremental launching or Push-out MethodIn this form of construction the deck is pushed across the span with hydraulic rams or winches. Decks of prestressed post-tensioned precast segments, steel or girders have been erected. Usually spans are limited to 50~60 m to avoid excessive deflection and cantilever stresses , although greater distances have been bridged by installing temporary support towers . Typically the method is most appropriate for long, multi-span bridges in the range 300 ~ 600 m ,but ,much shorter and longer bridges have been constructed . Unfortunately, this very economical mode of construction can only be applied when both the horizontal and vertical alignments of the deck are perfectly straight, or alternatively of constant radius. Where pushing involves a small downward grade (4% ~ 5%) then a braking system should be installed to prevent the deck slipping away uncontrolled and heavy bracing is then needed at the restraining piers.Bridge launching demands very careful surveying and setting out with continuous and precise checks made of deck deflections. A light aluminum or steel-launching nose forms the head of the deck to provide guidance over the pier. Special teflon or chrome-nickel steel plate bearings are used to reduce sliding friction to about 5% of the weight, thus slender piers would normally be supplemented with braced columns to avoid cracking and other damage. These columns would generally also support the temporary friction bearings and help steer the nose.In the case of precast construction, ideally segments should be cast on beds near the abutments and transferred by rail to the post-tensioning bed, the actual transport distance obviously being kept to the minimum. Usually a segment is cast against the face of the previously concerted unit to ensure a good fit when finally glued in place with an epoxy resin. If this procedure is not adopted , gaps of approximately 500mm shold be left between segments with the reinforcements running through andstressed together to form a complete unit , but when access or space on the embankment is at a premium it may be necessary to launch the deck intermittently to allow sections to be added progressively .The correponding prestressing arrangements , both for the temporary and permanent conditions would be more complicated and careful calculations needed at all positions .The pricipal advantage of the bridge-launching technique is the saving in falsework, especially for high decks. Segments can also be fabricated or precast in a protected environment using highly productive equipment. For concrete segment, typically two segment are laid each week (usually 10 ~ 30 m in length and perhaps 300 to 400 tonnes in weight) and after posttensioning incrementally launched at about 20 m per day depending upon the winching/jacking equipment.Balanced Cantiulever ConstructionDevelopment in box section and prestressed concrete led to short segment being assembled or cast in place on falsework to form a beam of full roadway width. Subsequently the method was refined virtually to eliminate the falsework by using a previously constructed section of the beam to provide the fixing for a subsequently cantilevered section. The principle is demonsrated step-by-step in the example shown in Fig.1.In the simple case illustrated, the bridge consists of three spans in the ratio 1:1:2. First the abutments and piers are constructed independently from the bridge superstructure. The segment immediately above each pier is then either cast in situ or placed as a precast unit .The deck is subsequently formed by adding sections symmetrically either side.Ideally sections either side should be placed simultaneously but this is usually impracticable and some inbalance will result from the extra segment weight, wind forces, construction plant and material. When the cantilever has reached both the abutment and centre span,work can begin from the other pier , and the remainder of the deck completed in a similar manner . Finally the two individual cantilevers are linked at the centre by a key segment to form a single span. The key is normally cast in situ.The procedure initially requires the first sections above the column and perhaps one or two each side to be erected conventionally either in situ concrete or precast and temporarily supported while steel tendons are threaded and post-tensioned . Subsequent pairs of section are added and held in place by post-tensioning followed by grouting of the ducts. During this phase only the cantilever tendons in the upper flange and webs are tensioned. Continuity tendons are stressed after the key section has been cast in place. The final gap left between the two half spans should be wide enough to enable the jacking equipment to be inserted. When the individual cantilevers are completed and the key section inserted the continuity tendons are anchored symmetrically about the centre of the span and serve to resist superimposed loads, live loads, redistribution of dead loads and cantilever prestressing forces.The earlier bridges were designed on the free cantilever principle with an expansion joint incorporated at the center .Unfortunately,settlements , deformations , concrete creep and prestress relaxation tended to produce deflection in each half span , disfiguring the general appearance of the bridge and causing discomfort to drivers .These effects coupled with the difficulties in designing a suitable joint led designers to choose a continuous connection, resulting in a more uniform distribution of the loads and reduced deflection. The natural movements were provided for at the bridge abutments using sliding bearings or in the case of long multi-span bridges, joints at about 500 m centres.Special Requirements in Advanced Construction TechniquesThere are three important areas that the engineering and construction team has to consider:(1) Stress analysis during construction: Because the loadings and support conditions of the bridge are different from the finished bridge, stresses in each construction stage must be calculated to ensurethe safety of the structure .For this purpose, realistic construction loads must be used and site personnel must be informed on all the loading limitations. Wind and temperature are usually significant for construction stage.(2) Camber: In order to obtain a bridge with the right elevation, the required camber of the bridge at each construction stage must be calculated. It is required that due consideration be given to creep and shrinkage of the concrete. This kind of the concrete. This kind of calculation, although cumbersome, has been simplified by the use of the compiters.(3) Quality control: This is important for any method construction, but it is more so for the complicated construction techniques. Curing of concrete, post-tensioning, joint preparation, etc. are detrimental to a successful structure. The site personnel must be made aware of the minimum concrete strengths required for post-tensioning, form removal, falsework removal, launching and other steps of operations.Generally speaking, these advanced construction techniques require more engineering work than the conventional falsework type construction, but the saving could be significant.大桥涵洞在大多数情况中桥梁的高度和跨度完全取决于河流的流量,桥梁的高度和跨度必须能够容纳最大洪水量.事实上,这不仅仅是洪水最大流量的问题,还需要在不同时间间隔预测不同程度的水灾。
毕业设计英文翻译
NC Technology数控技术1、Research current situation of NC lathe in our times数控车床的研究现状Research and development process to such various kinds of new technologies asnumerical control lathe , machining center , FMS , CIMS ,etc. of countries all over theworld, linked to with the international economic situation closely.The machine tool industryhas international economy to mutually promote and develop, enter 21 alert eras of World Affairs, the function that people's knowledge plays is more outstanding , and the machinetool industry is regarded as the foundation of the manufacturing industry of the machine, itskey position and strategic meaning are more obvious. Within 1991-1994 years, the economic recession of the world, expensive FMS, CIMS lowers the temperature, among 1995-2000 years, the international economy increases at a low speed, according to requisition for NC lathe and the world four major international lathes exhibition in order to boost productivity of users of various fields of present world market (EMO , IMTS , JIMTOF , China CIMT of Japan of U.S.A. of Europe), have the analysis of the exhibit, there are the following several points mainly in the technical research of NC lathe in our times:研究发展各种新技术如数控车床、加工中心、柔性制造系统、计算机集成制造系统等等将世界上所有国家通过国际经济形势紧密联系。
大学本科毕业设计--英文原文+中文翻译
Library of C the CNC industrialdeveloped tens of thousands and educational field, he hasNUMERICAL CONTROLNumerical Control technology as it is known today, emerged in the mid 20th century. It can be traced to the year of 1952, the U.S. Air Force, and the names of John Parsons and the Massachusetts Institute of Technology in Cam-bridge, MA, USA. It was not applied in production manu-facturing until the early 1960's. The real boom came in the form of CNC, around the year of 1972, and a decade later with the introduction of affordable micro computers. The history and development of this fascinating technology has been well documented in many publications.In the manufacturing field, and particularly in the area of metal working, Numerical Control technology has caused something of a revolution. Even in the days before comput-ers became standard fixtures in every company and in many homes, the2machine tools equipped with Numerical Control system found their special place in the machine shops. The recent evolution of micro electronics and the never ceasing computer development, including its impact on Numerical Control, has brought significant changes to the manufacturing sector in general and metalworking in-dustry in particular.DEFINITION OF NUMERICAL CONTROLIn various publications and articles, many descriptions have been used during the years, to define what Numerical Control is. It would be pointless to try to find yet another definition, just for the purpose of this handbook. Many of these definitions share the same idea, same basic concept, just use different wording.The majority of all the known definitions can be summed up into a relatively simple statement:Numerical Control can be defined as an operation of machine tools by the means of specifically coded instructions to the machine control systemThe instructions are combinations of the letters of alpha-bet, digits and selected symbols, for example, a decimal point, the percent sign or the parenthesis symbols. All in-structions are written in a logical order and a predetermined form. The collectionNUMERICAL CONTROLof all instructions necessary to ma-chine a part is called an NC Program, CNC Program, or a Part Program. Such a program can be stored for a future use and used repeatedly to achieve identical machining re-sults at any time.♦ NC and CNC TechnologyIn strict adherence to the terminology, there is a differ-ence in the meaning of the abbreviations NC and CNC. The NC stands for the older and original Numerical Control technology, whereby the abbreviation CNC stands for the newer Computerized Numerical Control technology, a modem spin-off of its older relative. However, in practice, CNC is the preferred abbreviation. To clarify the proper us-age of each term, look at the major differences between the NC and the CNC systems.Both systems perform the same tasks, namely manipula-tion of data for the purpose of machining a part. In both cases, the internal design of the control system contains the logical instructions that process the data. At this point the similarity ends. The NC system (as opposed to the CNC system) uses a fixed logical functions, those that are built-in and perma-nently wired within the control unit. These functions can-not be changed by the programmer or the machine opera-tor. Because of the fixed4wiring of the control logic, the NC control system is synonymous with the term 'hardwired'. The system can interpret a part program, but it does not al-low any changes to the program, using the control features. All required changes must be made away from the control, typically in an office environment. Also, the NC system re-quires the compulsory use of punched tapes for input of the program information.The modem CNC system, but not the old NC system, uses an internal micro processor (i.e., a computer). This computer contains memory registers storing a variety of routines that are capable of manipulating logical functions. That means the part programmer or the machine operator can change the program on the control itself (at the ma-chine), with instantaneous results. This flexibility is the greatest advantage of the CNC systems and probably the key element that contributed to such a wide use of the tech-nology in modern manufacturing. The CNC programs and the logical functions are stored on special computer chips, as software instructions, rather than used by the hardware connections, such as wires, that control the logical func-tions. In contrast to the NC system, the CNC system is syn-onymous with the term 'softwired'.NUMERICAL CONTROLWhen describing a particular subject that relates to the numerical control technology, it is customary to use either the term NC or CNC. Keep in mind that NC can also mean CNC in everyday talk, but CNC can never refer to the older technology, described in this handbook under the abbrevia-tion ofNC. The letter 'C 'stands for Computerized, and it is not applicable to the hardwired system. All control systems manufactured today are of the CNC design. Abbreviations such as C&C or C'n 'C are not correct and reflect poorly on anybody that uses them.CONVENTIONAL AMD CNC MACHININGWhat makes the CNC machining superior to the conven-tional methods? Is it superior at all? Where are the main benefits? If the CNC and the conventional machining pro-cesses are compared, a common general approach to ma-chining a part will emerge: Obtain and study the drawingSelect the most suitable machining methodDecide on the setup method (work holding)Select the cutting toolsEstablish speeds and feedsMachine the part6This basic approach is the same for both types of machin-ing. The major difference is in the way how various data are input. A feedrate of 10 inches per minute (10 in/min) is the same in manual or CNC applications, but the method of applying it is not. The same can be said about a coolant - it can be activated by turning a knob, pushing a switch or programming a special code. All these actions will result in a coolant rushing out of a nozzle. In both kinds of machin-ing, a certain amount of knowledge on the part of the user is required. After all, metal working, particularly metal cut-ting, is mainly a skill, but it is also, to a great degree, an art and a profession of large number of people. So is theappli-cation of Computerized Numerical Control. Like any skill or art or profession, mastering it to the last detail is neces-sary to be successful. It takes more than technical knowl-edge to be a CNC machinist or a CNC programmer. Work experience and intuition, and what is sometimes called a 'gut-feel', is a much needed supplement to any skill.In a conventional machining, the machine operator sets up the machine and moves each cutting tool, using one or both hands, to produce the required part. The design of a manual machine tool offers many features that help the process of machining a part -NUMERICAL CONTROLlevers, handles, gears and di-als, to name just a few. The same body motions are re-peated by the operator for every part in the batch. However, the word 'same 'in this context really means'similar 'rather than 'identical'. Humans are not capable to repeat every process exactly the same at all times - that is the job ofma-chines. People cannot work at the same performance level all the time, without a rest. All of us have some good andsome bad moments. The results of these moments, when*applied to machining a part, are difficult to predict. There will be some differences and inconsistencies within each batch of parts. The parts will not always be exactly the same. Maintaining dimensional tolerances and surface fin-ish quality are the most typical problems in conventional machining. Individual machinists may have their own time 'proven' methods, different from those of their fellow col-leagues. Combination of these and other factors create a great amount of mconsistency.The machining under numerical control does away with the majority of inconsistencies. It does not require the same physical involvement as manual machining. Numerically controlled machining does not need any levers or dials or handles, at least8not in the same sense as conventional ma-chining does. Once the part program has been proven, it can be used any number of times over, always returning consistent results. That does not mean there are no limiting factors. The cutting tools do wear out, the material blank in one batch is not identical to the material blank in another batch, the setups may vary, etc. These factors should be considered and compensated for, whenever necessary.The emergence of the numerical control technology does not mean an instant, or even a long term, demise of all man-ual machines. There are times when a traditional machin-ing method is preferable to a computerized method. For ex-ample, a simple one time job may be done more efficiently on a manual machine than a CNC machine. Certain types of machining jobs will benefit from manual or semiauto-matic machining, rather than numerically controlled ma-chining. The CNC machine tools are not meant to replace every manual machine, only to supplement them.In many instances, the decision whether certain machin-ing will be done on a CNC machine or not is based on the number of required parts and nothing else. Although the volume of partsNUMERICAL CONTROLmachined as a batch is always an important criteria, it should never be the only factor. Consideration should also be given to the part complexity, its tolerances, the required quality of surface finish, etc. Often, a single complex part will benefit from CNC machining, while fifty relatively simple parts will not.Keep in mind that numerical control has never machined a single part by itself. Numerical control is only a process or a method that enables a machine tool to be used in a pro-ductive, accurate and consistent way.NUMERICAL CONTROL ADVANTAGESWhat are the main advantages of numerical control?It is important to know which areas of machining will benefit from it and which are better done the conventional way. It is absurd to think that a two horse power CNC mill will win over jobs that are currently done on a twenty times more powerful manual mill. Equally unreasonable are ex-pectations of great improvements in cutting speeds and feedrates over a conventional machine. If the machining and tooling conditions are the same, the cutting time will be very close in both cases.Some of the major areas where the CNC user can and should expect improvement:10Setup time reductionLead time reductionAccuracy and repeatabilityContouring of complex shapesSimplified tooling and work holdingConsistent cutting timeGeneral productivity increaseEach area offers only a potential improvement. Individ-ual users will experience different levels of actual improve-ment, depending on the product manufactured on-site, the CNC machine used, the setup methods, complexity of fixturing, quality of cutting tools, management philosophy and engineering design, experience level of the workforce, individual attitudes, etc.Setup Time ReductionIn many cases, the setup time for a CNC machine can be reduced, sometimes quite dramatically. It is important to realize that setup is a manual operation, greatly dependent on the performance of CNC operator, the type of fixturing and general practices of the machine shop. Setup time is unproductive, but necessary - it is a part of the overhead costs of doing business. To keep the setupNUMERICAL CONTROLtime to a mini-mum should be one of the primary considerations of any machine shop supervisor, programmer and operator. Because of the design of CNC machines, the setup time should not be a major problem. Modular fixturing, standard tooling, fixed locators, automatic tool changing, pallets and other advanced features, make the setup time more efficient than a comparable setup of a conventional machine. With a good knowledge of modern manufacturing, productivity can be increased significantly.The number of parts machined under one setup is also important, in order to assess the cost of a setup time. If a great number of parts is machined in one setup, the setup cost per part can be very insignificant. A very similar re-duction can be achieved by grouping several different oper-ations into a single setup. Even if the setup time is longer, it may be justified when compared to the time required to setup several conventional machines.Lead Time ReductionOnce a part program is written and proven, it is ready to be Bsed again in the future, even at a short notice. Although the lead time for the first run is usually longer, it is virtually nil for any subsequent run. Even if an engineering change of the part design12requires the program to be modi tied, it can be done usually quickly, reducing the lead time.Long lead time, required to design and manufacture sev-eral special fixtures for conventional machines, can often be reduced by preparing a part program and the use of sim-plified fixturing. Accuracy and RepeatabilityThe high degree of accuracy and repeatability of modern CNC machines has been the single major benefit to many users. Whether the part program is stored on a disk or in the computer memory, or even on a tape (the original method), it always remains the same. Any program can be changed at will, but once proven, no changes are usually required any more. A given program can be reused as many times as needed, without losing a single bit of data it contains. True, program has to allow for such changeable factors as tool wear and operating temperatures, it has to be stored safely, but generally very little interference from the CNC pro-grammer or operator will be required. The high accuracy of CNC machines and their repeatability allows high quality parts to be produced consistently time after time. Contouring of Complex ShapesNUMERICAL CONTROLCNC lathes and machining centers are capable of con-touring a variety of shapes. Many CNC users acquired their machines only to be able to handle complex parts. A good examples are CNC applications in the aircraft and automo-tive industries. The use of some form of computerized pro-gramming is virtually mandatory for any three dimensional tool path generation.Complex shapes, such as molds, can be manufactured without the additional expense of making a model for trac-ing. Mirrored parts can be achieved literally at the switch of a button. Storage of programs is a lot simpler than storage of patterns, templates, wooden models, and other pattern making tools.Simplified Tooling and Work HoldingNonstandard and 'homemade' tooling that clutters the benches and drawers around a conventional machine can be eliminated by using standard tooling, specially designed for numerical control applications. Multi-step tools such as pilot drills, step drills, combination tools, counter borers and others are replaced with several individual standard tools. These tools are often cheaper and easier to replace than special and nonstandard tools.Cost-cutting measures have forced many tool suppliers to keep a low or even a nonexistent inventory, increasing the delivery lime14to the customer. Standard, off-the-shelf tooling can usually beob-tained faster then nonstandard tooling.Fixturing and work holding for CNC machines have only one major purpose - to hold the part rigidly and in the same position for all parts within a batch. Fixtures designed for CNC work do not normally require jigs, pilot holes and other hole locating aids.♦ Cutting Time and Productivity IncreaseThe cutting time on the CNC machine is commonly known as the cycle time - and is always consistent. Unlike a conventional machining, where the operator's skill, experi-ence and personal fatigue are subject to changes, the CNC machining is under the control of a computer. The small amount of manual work is restricted to the setup andload-ing and unloading the part. For large batch runs, the high cost of the unproductive time is spread among many parts, making it less significant. The main benefit of a consistent cutting time is for repetitive jobs, where the production scheduling and work allocation to individual machine tools can be done very accurately.The main reason companies often purchase CNCma-chines is strictly economic - it is a serious investment. Also, having a competitive edge is always on the mind of every plant manager. The numerical control teclmology offers excellent means to achieve a significant improvement in the manufacturing productivity and increasing the overall quality of the manufactured parts. Like any means, it has to be used wisely and knowledgeably. When more and more companies use the CNCtechnology, just having a CNC machine does not offer the extra edge anymore. Thecom-panies that get forward are those who know how to use the technology efficiently and practice it to be competitive in the global economy.To reach the goal of a major increase in productivity, it is essential that users understand the fundamental principles on which CNC technology is based. These principles take many forms, for example, understanding the electronic cir-cuitry, complex ladder diagrams, computer logic, metrol-ogy, machine design, machining principles and practices and many others. Each one has to be studied and mastered by the person in charge. In this handbook, the emphasis is on the topics that relate directly to the CNC programming and understanding the most common CNC machine tools, the Machining Centers and the lathes (sometimes also called the Turning Centers). The part quality consideration should be very important to every programmer and ma-chine tool operator and this goal is also reflected in the handbook approach as well as in the numerous examples.TYPES OF CNC MACHINE TOOLSDifferent kinds of CNCmachines cover an extremelylarge variety. Their numbersare rapidly increasing, as thetechnology developmentadvances. It is impossible toiden-tify all the applications,they would make a long list.Here is a brief list of some ofthe groups CNC machines canbe part of: *Mills and Machining centersLathes and Turning CentersDrilling machines CNC machining centers andlathes dominate the number ofinstallations in industry. Thesetwo groups share the marketjust about equally. Someindustries may have a higherneed for one group ofmachines, depending on their □ Boring mills and Profilers □ EDM machines □ Punch presses and Shears □ Flame cutting machines □ Routers □ Water jet and Laser profilers □ Cylindrical grinders □ Welding machines □ Benders, Winding and Spinning machines, etc.needs. One must remember that there are many different kinds of ladies and equally many different kinds ofma-chining centers. However, the programming process for a vertical machine is similar to the one for a horizontalma-chine or a simple CNC mill. Even between differentma-chine groups, there is a great amount of general applica-tions and the programming process is generally the same. For example, a contour milled with an end mill has a lot in common with a contour cut with a wire.♦ Mills and Machining Centers Standard number of axes on a milling machine is three - the X, Y and Z axes. The part set on a milling system is al-ways stationary, mounted on a moving machine table. The cutting tool rotates, it can move up and down (or in and out), but it does not physically follow the tool path.CNC mills - sometimes called CNC milling machines - are usually small, simple machines, without a tool changer or other automatic features. Their power rating is often quite low. In industry, they are used for toolroom work, maintenance purposes, or small part production. They are usuallydesigned for contouring, unlike CNC drills.CNC machining centers are far more popular and effi-cient than drills and mills, mainly for their flexibility. The main benefit the user gets out of a CNC machining center is the ability to group several diverse operations into a single setup. For example, drilling, boring, counter boring, tap-ping, spot facing and contour milling can be incorporated into a single CNC program. In addition, the flexibility is enhanced by automatic tool changing, using pallets to minimize idle time, indexing to a different side of the part, using a rotary movement of additional axes, and a number of other features. CNC machining centers can be equipped with special software that controls the speeds and feeds, the life of the cutting tool, automatic in-process gauging and offset adjustment and other production enhancing and time saving devices.There are two basic designs of a typical CNC machining center. They are the vertical and the horizontal machining centers. The major difference between the two types is the nature of work that can be done on them efficiently. For a vertical CNC machining center, the most suitable type of work are flat parts, either mounted to the fixture on the ta-ble, or held in a vise or a chuck. The work that requires ma-chining on two or more faces m a single setup is more de-sirable to be done on a CNC horizontal machining center. An good example is a pump housing and other cubic-like shapes. Some multi-face machining of small parts can also be done on a CNC vertical machining center equipped with a rotary table.The programming process is the same for both designs, but an additional axis (usually a B axis) is added to the hori-zontal design. This axis is either a simple positioning axis (indexing axis) for the table, or a fully rotary axis for simul-taneous contouring. This handbook concentrates on the CNC vertical ma-chining centers applications, with a special section dealing with the horizontal setup and machining. The program-ming methods are also applicable to the small CNC mills or drilling and/or tapping machines, but the programmer has to consider their restrictions.♦ Lathes and Turning CentersA CNC lathe is usually a machine tool with two axes, the vertical X axis and the horizontal Z axis. The main feature of a lathe that distinguishes it from a mill is that the part is rotating about the machine center line. In addition, the cut-ting tool is normally stationary, mounted in a sliding turret. The cutting tool follows the contour of the programmed tool path. For the CNC lathes with a milling attachment, so called live tooling, the milling tool has its own motor and rotates while the spindle is stationary.The modem lathe design can be horizontal or vertical. Horizontal type is far more common than the vertical type, but both designs have their purpose in manufacturing. Sev-eral different designs exist for either group. For example, a typical CNC lathe of the horizontal group can be designed with a flat bed or a slant bed, as a bar type, chucker type or a universal type. Added to these combinations are many ac-cessories that make a CNC lathe an extremely flexible ma-chine tool. Typically, accessories such as a tailstock, steady rests or follow-up rests, part catchers,pullout-fingers and even a third axis milling attachment are popular compo-nents of the CNC lathe. ?CNC lathe can be veiy versatile - so versatile in fact, that it is often called a CNC TurningCenter. All text and program examples in this handbook use the more traditional term CNC lathe, yet still recogniz-ing all its modern functions.中文翻译:数控正如我们现在所知,数控技术出现于20世纪中叶。
毕业设计中英文翻译

1 Introduction and scope1.1 Aims of the ManualThis Manual provides guidance on the design of reinforced and prestressed concrete building structures. Structures designed in accordance with this Manual will normally comply with DD ENV 1992-1-1: 19921 (hereinafter referred to as EC2).1.2 Eurocode systemThe structural Eurocodes were initiated by the European Commission but are now produced by the Comité Européen de Normalisation (CEN) which is the European standards organization, its members being the national standards bodies of the EU and EFTA countries,e.g. BSI.CEN will eventually publish these design standards as full European Standards EN (Euronorms), but initially they are being issued as Prestandards ENV. Normally an ENV has a life of about 3 years to permit familiarization and trial use of the standard by member states. After formal voting by the member bodies, ENVs are converted into ENs taking into account the national comments on the ENV document. At present the following Eurocode parts have been published as ENVs but as yet none has been converted to an EN:DD ENV 1991-1-1: Basis of design and actions on structures (EC1)DD ENV 1992-1-1: Design of concrete structures (EC2)DD ENV 1993-1-1: Design of steel structures (EC3)DD ENV 1994-1-1: Design of composite steel and concrete structures (EC4)DD ENV 1995-1-1: Design of timber structures (EC5)DD ENV 1996-1-1: Design of masonry structures (EC6)DD ENV 1997-1-1: Geotechnical design (EC7)DD ENV 1998-1-1: Earthquake resistant design of structures (EC8)DD ENV 1999-1-1: Design of aluminium alloy structures (EC9)Each Eurocode is published in a number of parts, usually with ‘General rules’ and ‘Rules for buildings’ in Part 1. The various parts of EC2 are:Part 1.1 General rules and rules for buildings;Part 1.2 Supplementary rules for structural fire design;Part 1.3 Supplementary rules for precast concrete elements and structures;Part 1.4 Supplementary rules for the use of lightweight aggregate concrete;Part 1.5 Supplementary rules for the use of unbonded and external prestressing tendons;Part 1.6 Supplementary rules for plain or lightly reinforced concrete structures;Part 2.0 Reinforced and prestressed concrete bridges;Part 3.0 Concrete foundations;Part 4.0 Liquid retaining and containment structures.All Eurocodes follow a common editorial style. The codes contain ‘Principles’ and‘Application rules’. Principles are general statements, definitions, requirements and sometimes analytical models. All designs must comply with the Principles, and no alternative is permitted. Application rules are rules commonly adopted in design. They follow the Principles and satisfy their requirements. Alternative rules may be used provided that compliance with the Principles can be demonstrated.Some parameters in Eurocodes are designated by | _ | , commonly referred to as boxed values. The boxed values in the Codes are indicative guidance values. Each member state is required to fix the boxed value applicable within its jurisdiction. Such information would be found in the National Application Document (NAD) which is published as part of each ENV.There are also other purposes for NADs. NAD is meant to provide operational information to enable the ENV to be used. For certain aspects of the design, the ENV may refer to national standards or to CEN standard in preparation or ISO standards. The NAD is meant to provide appropriate guidance including modifications required to maintain compatibility between the documents. Very occasionally the NAD might rewrite particular clauses of the code in the interest of safety or economy. This is however rare.1.3 Scope of the ManualThe range of structures and structural elements covered by the Manual is limited to building structures that do not rely on bending in columns for their resistance to horizontal forces and are also non-sway. This will be found to cover the vast majority of all reinforced and prestressed concrete building structures. In using the Manual the following should be noted:• The Manual has been drafted to comply with ENV 1992-1-1 together with the UK NAD• Although British Standards have been referenced as loading codes in Sections 3 and 6,to comply with the UK NAD, the Manual can be used in conjunction with other loading codes • The structures are braced and non-sway• The concrete is of normal weight• The structure is predominantly in situ• Prestressed concrete members have bonded or unbonded internal tendons• The Manual can be used in conjunction with all commonly used materials in construction; however the data given are limited to the following:– concrete up to characteristic cylinder strength of 50N/mm2 (cube strength 602N/mm)– high-tensile reinforcement with characteristic strength of 4602N/mm– mild-steel reinforcement with characteristic strength of 2502N/mm– prestressing tendons with 7-wire low-relaxation (Class 2) strands• High ductility (Class H) has been assumed for:– all ribbed bars and grade 250 bars, and– ribbed wire welded fabric in wire sizes of 6mm or over• Normal ductility (Class N) has been assumed for plain or indented wire welded fabric.For structures or elements outside this scope EC2 should be used.1.4 Contents of the ManualThe Manual covers the following design stages:• gene ral principles that govern the design of the layout of the structure• initial sizing of members• estimating of quantities of reinforcement and prestressing tendons• final design of members.2 General principlesThis section outlines the general principles that apply to both initial and final design of both reinforced and prestressed concrete building structures, and states the design parameters that govern all design stages.2.1 GeneralOne engineer should be responsible for the overall design, including stability, and should ensure the compatibility of the design and details of parts and components even where some or all of the design and details of those parts and components are not made by the same engineer.The structure should be so arranged that it can transmit dead, wind and imposed loads in a direct manner to the foundations. The general arrangement should ensure a robust and stable structure that will not collapse progressively under the effects of misuse or accidental damage to any one element.The engineer should consider engineer site constraints, buildability2, maintainability and decommissioning.The engineer should take account of his responsibilities as a ‘Designer’ under the Construction (Design & Management) Regulations.32.2 StabilityLateral stability in two orthogonal directions should be provided by a system of strongpoints within the structure so as to produce a braced non-sway structure, in which the columns will not be subject to significant sway moments. Strongpoints can generally be provided by the core walls enclosing the stairs, lifts and service ducts. Additional stiffness can be provided by shear walls formed from a gable end or from some other external or internal subdividing wall. The core and shear walls should preferably be distributed throughout the structure and so arranged that their combined shear centre is located approximately on the line of the resultant in plan of the applied overturning forces. Where this is not possible, the resulting twisting moments must be considered when calculating the load carried by each strongpoint. These walls should generally be of reinforced concrete not less than 180mm thick to facilitate concreting, but they may be of 215mm brickwork or 190mm solid blockwork properly tied and pinned up to the framing for low- to medium-rise buildings.Strongpoints should be effective throughout the full height of the building. If it is essential for strongpoints to be discontinuous at one level, provision must be made to transfer the forces toother vertical components.It is essential that floors be designed to act as horizontal diaphragms, particularly if precast units are used.Where a structure is divided by expansion joints each part should be structurally independent and designed to be stable and robust without relying on the stability of adjacent sections.2.3 RobustnessAll members of the structure should be effectively tied together in the longitudinal, transverse and vertical directions.A well-designed and well-detailed cast-in situ structure will normally satisfy the detailed tying requirements set out in subsection 5.11.Elements whose failure would cause collapse of more than a limited part of the structure adjacent to them should be avoided. Where this is not possible, alternative load paths should be identified or the element in question strengthened.2.4 Movement jointsMovement joints may need to be provided to minimize the effects of movements caused by, for example, shrinkage, temperature variations, creep and settlement.The effectiveness of movement joints depends on their location. Movement joints should divide the structure into a number of individual sections, and should pass through the whole structure above ground level in one plane. The structure should be framed on both sides of the joint. Some examples of positioning movement joints in plan are given in Fig. 2.1.Movement joints may also be required where there is a significant change in the type of foundation or the height of the structure. For reinforced concrete frame structures in UK conditions, movement joints at least 25mm wide should normally be provided at approximately 50m centres both longitudinally and transversely. In the top storey and for open buildings and exposed slabs additional joints should normally be provided to give approximately 25m spacing. Joint spacing in exposed parapets should be approximately 12m.Joints should be incorporated in the finishes and in the cladding at the movement joint locations.2.5 Fire resistance and durabilityFor the required period of fire resistance (prescribed in the Building Regulations), the structure should:• have adequate loadbearing capacity• limit the temperature rise on the far face by sufficient insulation, and• have sufficient integrity to prevent the formation of crack s that will allow the passage of fire and gases.Fig. 2.1 Location of movement jointsThe design should take into account the likely deterioration of the structure and its components in their environment having due regard to the anticipated level of maintenance. The following inter-related factors should be considered:• the required performance criteria• the expected environmental conditions• the composition, properties and performance of materials• the shape of members and detailing• the quality of workmanship• any protective measure• the likely maintenance during the intended life.Concrete of appropriate quality with adequate cover to the reinforcement should be specified. The above requirements for durability and fire resistance may dictate sizes for members greater than those required for structural strength alone.。
毕设原文及译文

自动变速器描述自动变速器,像手动变速箱,匹配负载要求的车辆的力量和速度的各种发动机。
这是自动完成取决于节气门位置,车辆的速度,和位置的变化控制杆。
自动变速器是内置的模式,有两个,三个或四个前锋的速度,和一些装备有超载。
运行的控制是有限的选择范围内的齿轮移动的控制杆的控制。
耦合自动变速器通过扭矩转换器于发动机相连.这种转换器被应用在自动变速器上,主要是因为每次车辆停杯停下来,它不用手动分离扭矩的输出.要使自动变速器的变化不受发动机扭矩中断的影响,具有缓冲作用的液力偶合器也是非常好的应用。
换档由于自动变速箱齿轮比独立的变化,操控者没有释放油门也是一样的.为此,它会利用行星齿轮组,其内容已被锁定和释放各种组合,生产所需的正向和反向传动比.行星齿轮机构的锁定是通过使用液压驱动,多磁盘离合器和刹车带实现的。
驱动锁定装置的的液压力是由阀体控制的.阀体像是液压控制中心,接收当前的车速,节气门位置及换档手柄的位置信号。
基于这一条件,阀体给与相应锁定装置液压力,使其产生所需的传动比。
变速器运行控制自动变速器的唯一运行控制单元是换挡手柄,即使加速踏板也可被认为是运行控制.主要因为当手柄完全释放时,变速器传递的扭矩就变换为较低的比例。
多片式离合器多片式离合器,在大多数情况下是通过锁定的行星齿轮组把扭矩传递给旋转单元。
在某些情况下,多片式离合器也被用来锁定行星齿轮组设置的元素的传动体,以便它也能够作为控制体。
多片式离合器的构成多片式离合器是由下列部分组成:离合器盘和离合器板多片式离合器的主要元件是离合器盘和离合器板,离合器盘是带有摩擦材料的钢制圆盘.这些圆盘边缘被制成齿形,镶嵌在内心圆周里,因此也就成为了离合器的关键元件.离合器盘是由没有面带有内齿形的钢板制成,因此也就成为离合器鼓和变速箱内关键部件。
离合器盘和鼓通过交替堆叠,使他们锁在一起或通过简单的挤压使他们分离。
离合器鼓和毂离合器鼓包含有多片离合器盘和离合器板,并且通常情况下依附正在受驱动的行星齿轮组的元件离合器毂通常与正在驱动的单元相连,并确定离合器盘和板的内部关系。
毕业设计英文翻译
毕业设计论文翻译(译文+原文)

Hacking tricks toward security on network environments Tzer-Shyong Chen1, Fuh-Gwo Jeng 2, and Yu-Chia Liu 11 Department of Information Management, Tunghai University, Taiwan2 Department of Applied Mathematics, National Chiayi University, TaiwanE-Mail:****************.edu.twAbstractMounting popularity of the Internet has led to the birth of Instant Messaging, an up-and-coming form of Internet communication. Instant Messaging is very popular with businesses and individuals since it has instant communication ability. As a result, Internet security has become a pressing and important topic for discussion. Therefore, in recent years, a lot of attention has been drawn towards Internet security and the various attacks carried out by hackers over the Internet. People today often handle affairs via the Internet. For instance, instead of the conventional letter, they communicate with others by e-mails; they chat with friends through an instant messenger; find information by browsing websites instead of going to the library; perform e-commerce transactions through the Internet, etc. Although the convenience of the Internet makes our life easier, it is also a threat to Internet security. For instance, a business email intercepted during its transmission may let slip business confidentiality; file transfers via instant messengers may also be intercepted, and then implanted with backdoor malwares; conversations via instant messengers could be eavesdropped. Furthermore, ID and password theft may lose us money when using Internet bank service. Attackers on the Internet use hacking tricks to damage systems while users are connected to the Internet. These threats along with possible careless disclosure of business information make Instant Messaging a very unsafe method of communication for businesses. The paper divides hacking tricks into three categories: (1) Trojan programs that share files via instant messenger. (2) Phishing or fraud via e-mails. (3) Fake Websites. Keywords:Hacking tricks, Trojan programs, Phishing, Firewall, Intrusion detection system.1. IntroductionIncreasingly more people are using instant messengers such as MSN Messenger, Yahoo! Messenger, ICQ, etc as the media of communication. These instant messengers transmit alphanumeric message as well as permit file sharing. During transfer, a file may be intercepted by a hacker and implanted with backdoor malware. Moreover, the e-mails users receive every day may include Spam, advertisements, and fraudulent mail intended to trick uninformed users. Fake websites too are prevalent. Websites which we often visit could be counterfeited by imitating the interface and the URL of the original, tricking users. The paper classifies hacking tricks into three categories which are explained in the following sections.2. Hacking TricksThe paper divides hacking tricks into three categories: (1) Trojan programs that share files via instant messenger. (2) Phishing (3) Fake Websites.2.1 Trojan programs that share files via instant messengerInstant messaging allows file-sharing on a computer [9]. All present popular instant messengers have file sharing abilities, or allow users to have the above functionality by installing patches or plug-ins; this is also a major threat to present information security. These communication softwares also makeit difficult for existing hack prevention methods to prevent and control information security. Therefore, we shall discuss how to control the flow of instant messages and how to identify dangerous user behavior.Hackers use instant communication capability to plant Trojan program into an unsuspected program; the planted program is a kind of remotely controlled hacking tool that can conceal itself and is unauthorized. The Trojan program is unknowingly executed, controlling the infected computer; it can read, delete, move and execute any file on the computer. The advantages of a hacker replacing remotely installed backdoor Trojan programs [1] with instant messengers to access files are:When the victim gets online, the hacker will be informed. Thus, a hacker can track and access the infected computer, and incessantly steal user information.A hacker need not open a new port to perform transmissions; he can perform his operations through the already opened instant messenger port.Even if a computer uses dynamic IP addresses, its screen name doesn’t change.Certain Trojan programs are designed especially for instant messengers. These Trojans can change group settings and share all files on the hard disk of the infected computer. They can also destroy or modify data, causing data disarray. This kind of program allows a hacker access to all files on an infected computer, and thus poses a great threat to users. The Trojan program takes up a large amount of the resources of the computer causing it to become very slow and often crashes without a reason.Trojan programs that access a user computer through an instant messenger are probably harder to detect than classic Trojan horse programs. Although classic Trojan intrudes a computer by opening a listening or outgoing port which is used to connect toa remote computer, a desktop firewall can effectively block such Trojans. Alternatively, since it is very difficult for the server’s firewall to spot intrusion by controlling an instant messenger’s flow, it is extremely susceptible to intrusion.Present Trojan programs have already successfully implemented instant messengers. Some Trojan programs are Backdoor Trojan, AIMVision, and Backdoor. Sparta.C. Backdoor Trojans use ICQ pager to send messages to its writer. AIMVision steals AIM related information stored in the Windows registry, enabling a hacker to setup an AIM user id. Backdoor. Sparta.C uses ICQ to communicate with its writer and opens a port on an infected host and send its IP Address to the hacker, and at the same time attempts to terminate the antivirus program or firewall of the host.2.1.1 Hijacking and ImpersonationThere are various ways through which a hacker can impersonate other users [7]. The most commonly used method is eavesdropping on unsuspecting users to retrieve user accounts, passwords and other user related information.The theft of user account number and related information is a very serious problem in any instant messenger. For instance, a hacker after stealing a user’s information impersonate the user; the user’s contacts not knowing that the user’s account has been hacked believe that the person they’re talking to is the user, and are persuaded to execute certain programs or reveal confidential information. Hence, theft of user identity not only endangers a user but also surrounding users. Guarding against Internet security problems is presently the focus of future research; because without good protection, a computer can be easily attacked, causing major losses.Hackers wishing to obtain user accounts may do so with the help of Trojans designed to steal passwords. If an instant messenger client stores his/her password on his/her computer, then a hacker can send a Trojan program to the unsuspecting user. When the user executes the program, the program shall search for the user’s password and send it to the hacker. There are several ways through which a Trojan program can send messages back to the hacker. The methods include instant messenger, IRC, e-mails, etc.Current four most popular instant messengers are AIM, Yahoo! Messenger, ICQ, and MSN Messenger, none of which encrypts its flow. Therefore, a hackercan use a man-in-the-middle attack to hijack a connection, then impersonate the hijacked user and participate in a chat-session. Although difficult, a hacker can use the man-in-the-middle attack to hijack the connection entirely. For example, a user may receive an offline message that resembles that sent by the server, but this message could have been sent by the hacker. All at once, the user could also get disconnected to the server. Furthermore, hackers may also use a Denial of Service (DoS) tool or other unrelated exploits to break the user’s connection. However, the server keeps the connection open, and does not know that the user has been disconnected; thus allowing the hacker to impersonate the user. Moreover, since the data flow is unencrypted and unauthenticated, a hacker can use man-in-the-middle attacks that are similar to that of ARP fraud to achieve its purpose.2.1.2 Denial of Service (DoS)There are many ways through which a hacker can launch a denial of service (DoS) attack [2] on an instant messenger user. A Partial DoS attack will cause a user end to hang, or use up a large portion of CPU resources causing the system to become unstable.Another commonly seen attack is the flooding of messages to a particular user. Most instant messengers allow the blocking of a particular user to prevent flood attacks. However, a hacker can use tools that allow him to log in using several different identities at the same time, or automatically create a large number of new user ids, thus enabling a flood attack. Once a flood attack begins, even if the user realizes that his/her computer has been infected, the computer will not be able to respond. Thus, the problem cannot be solved by putting a hacker’s user id on the ignore list of your instant messenger.A DoS attack on an instant messenger client is only a common hacking tool. The difficulty of taking precautions against it could turn this hacking tool into dangerous DoS type attacks. Moreover, some hacking tools do not just cause an instant messenger client to hang, but also cause the user end to consume large amount of CPU time, causing the computer to crash.2.1.3 Information DisclosureRetrieving system information through instant messenger users is currently the most commonly used hacking tool [4]. It can effortlessly collect user network information like, current IP, port, etc. IP address retriever is an example. IP address retrievers can be used to many purposes; for instance, a Trojan when integrated with an IP address retriever allows a hacker to receive all information related to the infected computer’s IP address as soon as the infected computer connects to the internet. Therefore, even if the user uses a dynamic IP address, hackers can still retrieve the IP address.IP address retrievers and other similar tools can also be used by hackers to send data and Trojans to unsuspecting users. Hackers may also persuade unsuspecting users to execute files through social engineering or other unrelated exploits. These files when executed search for information on the user’s computer and sends them back to the hacker through the instant messenger network.Different Trojan programs were designed for different instant messaging clients. For example, with a user accounts and password stealing Trojans a hacker can have full control of the account once the user logs out. The hacker can thus perform various tasks like changing the password and sending the Trojan program to all of the user’s contacts.Moreover, Trojans is not the only way through which a hacker can cause information disclosure. Since data sent through instant messengers are unencrypted, hackers can sniff and monitor entire instant messaging transmissions. Suppose an employee of an enterprise sends confidential information of the enterprise through the instant messenger; a hacker monitoring the instant messaging session can retrieve the data sent by the enterprise employee. Thus, we must face up to the severity of the problem.2.2 PhishingThe word “Phishing” first appeared in 1996. It is a variant of ‘fishing’, and formed by replacing the ‘f’ in ‘fishing’ with ‘ph’ from phone. It means tricking users of their money through e-mails.Based on the statistics of the Internet Crime Complaint Center, loss due to internet scam was as high as $1.256 million USD in 2004. The Internet Crime Complaint Center has listed the above Nigerian internet scam as one of the ten major internet scams.Based on the latest report of Anti-Phishing Working Group (APWG) [8], there has been a 28% growth of Phishing scams in the past 4 months, mostly in the US and in Asia. Through social engineering and Trojans, it is very difficult for a common user to detect the infection.To avoid exploitation of your compassion, the following should be noted:(1)When you need to enter confidentialinformation, first make sure that theinformation is entered via an entirely secureand official webpage. There are two ways todetermine the security of the webpage:a.The address displayed on the browserbegins with https://, and not http://. Payattention to if the letter ‘s’ exists.b.There is a security lock sign on the lowerright corner of the webpage, and whenyour mouse points to the sign, a securitycertification sign shall appear.(2)Consider installing a browser security softwarelike SpoofStick which can detect fake websites.(3)If you suspect the received e-mail is a Phishinge-mail, do not open attachments attached to theemail. Opening an unknown attachment couldinstall malicious programs onto your computer.(4)Do not click on links attached to your emails. Itis always safer to visit the website through theofficial link or to first confirm the authenticityof the link. Never follow or click on suspiciouslinks in an e-mail. It is advisable to enter theURL at the address bar of the web browser,and not follow the given link.Generally speaking, Phishing [3] [5] is a method that exploits people’s sympathy in the form of aid-seeking e-mails; the e-mail act as bait. These e-mails usually request their readers to visit a link that seemingly links to some charitable organization’s website; but in truth links the readers to a website that will install a Trojan program into the reader’s computer. Therefore, users should not forward unauthenticated charity mails, or click on unfamiliar links in an e-mail. Sometimes, the link could be a very familiar link or an often frequented website, but still, it would be safer if you’d type in the address yourself so as to avoid being linked to a fraudulent website. Phisher deludes people by using similar e-mails mailed by well-known enterprises or banks; these e-mails often asks users to provide personal information, or result in losing their personal rights; they usually contain a counterfeit URL which links to a website where the users can fillin the required information. People are often trapped by phishing due to inattentionBesides, you must also be careful when using a search engine to search for donations and charitable organizations.2.3 Fake WebsitesFake bank websites stealing account numbers and passwords have become increasingly common with the growth of online financial transactions. Hence, when using online banking, we should take precautions like using a secure encrypted customer’s certificate, surf the net following the correct procedure, etc.There are countless kinds of phishing baits, for instance, messages that say data expired, data invalid, please update data, or identity verification intended to steal account ID and matching password. This typeof online scam is difficult for users to identify. As scam methods become finer, e-mails and forged websites created by the impostor resemble their original, and tremendous losses arise from the illegal transactions.The following are methods commonly used by fake websites. First, the scammers create a similar website homepage; then they send out e-mails withenticing messages to attract visitors. They may also use fake links to link internet surfers to their website. Next, the fake website tricks the visitors into entering their personal information, credit card information or online banking account number and passwords. After obtaining a user’s information, the scammers can use the information to drain the bank accounts, shop online or create fake credit cards and other similar crimes. Usually, there will be a quick search option on these fake websites, luring users to enter their account number and password. When a user enters their account number and password, the website will respond with a message stating that the server is under maintenance. Hence, we must observe the following when using online banking:(1)Observe the correct procedure for entering abanking website. Do not use links resultingfrom searches or links on other websites.(2)Online banking certifications are currently themost effective security safeguard measure. (3)Do not easily trust e-mails, phone calls, andshort messages, etc. that asks for your accountnumber and passwords.Phishers often impost a well-known enterprise while sending their e-mails, by changing the sender’s e-mail address to that of the well known enterprise, in order to gain people’s trust. The ‘From’ column of an e-mail is set by the mail software and can be easily changed by the web administrator. Then, the Phisher creates a fake information input website, and send out e-mails containing a link to this fake website to lure e-mail recipients into visiting his fake website.Most Phishers create imitations of well known enterprises websites to lure users into using their fake websites. Even so, a user can easily notice that the URL of the website they’re entering has no relation to the intended enterprise. Hence, Phishers may use different methods to impersonate enterprises and other people. A commonly used method is hiding the URL. This can easily be done with the help of JavaScript.Another way is to exploit the loopholes in an internet browser, for instance, displaying a fake URL in the browser’s address bar. The security loophole causing the address bar of a browser to display a fake URL is a commonly used trick and has often been used in the past. For example, an e-mail in HTML format may hold the URL of a website of a well-known enterprise, but in reality, the link connects to a fake website.The key to successfully use a URL similar to that of the intended website is to trick the visual senses. For example, the sender’s address could be disguised as that of Nikkei BP, and the link set to http://www.nikeibp.co.jp/ which has one k less than the correct URL which is http://www.nikkeibp.co.jp/. The two URLs look very similar, and the difference barely noticeable. Hence people are easily tricked into clicking the link.Besides the above, there are many more scams that exploit the trickery of visual senses. Therefore, you should not easily trust the given sender’s name and a website’s appearance. Never click on unfamiliar and suspicious URLs on a webpage. Also, never enter personal information into a website without careful scrutiny.3. ConclusionsBusiness strategy is the most effective form of defense and also the easiest to carry out. Therefore, they should be the first line of defense, and not last. First, determine if instant messaging is essential in the business; then weigh its pros and cons. Rules and norms must be set on user ends if it is decided that the business cannot do without instant messaging functionality. The end server should be able to support functions like centralized logging and encryption. If not, then strict rules must be drawn, and carried out by the users. Especially, business discussions must not be done over an instant messenger.The paper categorized hacking tricks into three categories: (1) Trojan programs that share files via instant messenger. (2) Phishing (3) Fake Websites. Hacking tricks when successfully carried out could cause considerable loss and damage to users. The first category of hacking tricks can be divided into three types: (1) Hijacking and Impersonation; (2) Denial of Service; (3) Information Disclosure.Acknowledgement:This work was supported by the National Science Council, Taiwan, under contract No. NSC 95-2221-E-029-024.References[1] B. Schneier, “The trojan horse race,”Communications of ACM, Vol. 42, 1999, pp.128.[2] C. L. Schuba, “Analysis of a denial of serviceattack on TCP,” IEEE Security and PrivacyConference, 1997, pp. 208-223.[3] E. Schultz, “Phishing is becoming moresophisticated,” Computer and Security, Vol.24(3), 2005, pp. 184-185.[4]G. Miklau, D. Suciu, “A formal analysis ofinformation disclosure in data exchange,”International Conference on Management ofData, 2004, pp. 575-586.[5]J. Hoyle, “'Phishing' for trouble,” Journal ofthe American Detal Association, Vol. 134(9),2003, pp. 1182-1182.[6]J. Scambray, S. McClure, G. Kurtz, Hackingexposed: network security secrets and solutions,McGraw-Hill, 2001.[7]T. Tsuji and A. Shimizu, “An impersonationattack on one-time password authenticationprotocol OSPA,” to appear in IEICE Trans.Commun, Vol. E86-B, No.7, 2003.[8]Anti-Phishing Working Group,.[9]/region/tw/enterprise/article/icq_threat.html.有关网络环境安全的黑客技术摘要:现在人们往往通过互联网处理事务。
毕业设计英文翻译中英文对照版
Feasibility assessment of a leading-edge-flutter wind power generator前缘颤振风力发电机的可行性评估Luca Caracoglia卢卡卡拉克格里亚Department of Civil and Environmental Engineering, Northeastern University, 400 Snell Engineering Center, 360 Huntington A venue, Boston, MA 02115, USA美国东北大学土木与环境工程斯内尔工程中心400,亨廷顿大道360,波士顿02115This study addresses the preliminary technical feasibility assessment of a mechanical apparatus for conversion of wind energy. 这项研究涉及的是风能转换的机械设备的初步技术可行性评估。
The proposed device, designated as ‘‘leading-edge-fl utter wind power generator’’, employs aeroelastic dynamic instability of a blade airfoil, torsionally rotating about its leading edge. 这种被推荐的定义为“前缘颤振风力发电机”的设备,采用的气动弹性动态不稳定叶片翼型,通过尖端旋转产生扭矩。
Although the exploitation of aeroelastic phenomena has been proposed by the research community for energy harvesting, this apparatus is compact, simple and marginally susceptible to turbulence and wake effects.虽然气动弹性现象的开发已经有研究界提出可以通过能量采集。
毕业设计中英文翻译

Key to the development of four-rotors micro air vehicletechnologyTo date, micro d experimental study on the basic theory of rotary wing aircraft and have made more progress, but to really mature and practical, also faces a number of key technical challenges.1. Optimal designOverall design of rotary-wing aircraft when small, need to be guided by the following principles: light weight, small size, high speed, low power consumption and costs. But these principles there are constraints and conflicting with each other, such as: vehicle weights are the same, is inversely proportional to its size and speed, low energy consumption. Therefore, when the overall design of miniature four-rotor aircraft, first select the appropriate body material based on performance and price, as much as possible to reduce the weight of aircraft; second, the need to take into account factors such as weight, size, speed and energy consumption, ensuring the realization of design optimization.2. The power and energyPower unit includes: rotor, micro DC motor, gear reducer, photoelectric encoder and motor drive module, the energy provided by onboard batteries. Four-rotors micro air vehicle's weight is a major factor affecting their size and weight of the power and energy devices accounted for a large share of the weight of the entire body. For the OS4 II, the proportion is as high as 75%. Therefore, development of lighter, more efficient power and energy devices is further miniaturized four key to rotary wing aircraft.The other hand, the lifting occurs with a power unit, most airborne energy consumption. For example, OS4 II power 91% power consumption. To increase the efficiency of aircraft, the key is to improve the efficiency of the power plant. In addition to maximize transmission efficiency, you must alsoselect the motor and reduction ratios, taking into account the maximum efficiency and maximum power output under the premise of two indicators, electric operating point within the recommended run area.3. The establishment of mathematical modelIn order to achieve effective control of four-rotors micro air vehicles, must be established accurately under various flight model. But during the flight, it not only accompanied by a variety of physical effects (aerodynamic, gravity, gyroscopic effect and rotor moment of inertia, also is vulnerable to disturbances in the external environment, such as air. Therefore, it is difficult to establish an effective, reliable dynamic model. In addition, the use of rotary wing, small size, light weight, easy to shape, it is difficult to obtain accurate aerodynamic performance parameters, and also directly affects the accuracy of the model.Establishment of mathematical model of four-rotor MAV, must also be studied and resolved problems rotor under low Reynolds number aerodynamics. Aerodynamics of micro air vehicle with conventional aircraft is very different, many aerodynamic theory and analysis tools are not currently applied, requires the development of new theories and research techniques.4. Flight controlFour-rotors micro air vehicle is a six degrees of freedom (location and attitude) and 4 control input (rotor speed) of underactuated system (Underactuated System), have more than one variable, linear, strongly coupled and interfere with sensitive features, makes it very difficult to design of flight control system. In addition, the controller model accuracy and precision of the sensor performance will also be affected.Attitude control is the key to the entire flight control, because four-rotors micro air vehicle's attitude and position a direct coupling (roll pitch p directly causes the body to move around before and after p), if you can precisely control the spacecraft attitude, then the control law is sufficient to achieve itsposition and velocity PID control. International study to focus on with attitude control design and validation, results show that although the simulation for nonlinear control law to obtain good results, but has a strong dependence on model accuracy, its actual effect rather than PID control. Therefore, developed to control the spacecraft attitude, also has strong anti-jamming and environment-Adaptive attitude control of a tiny four-rotary wing aircraft flight control system of priorities.5. Positioning, navigation and communicationMiniature four-rotor aircraft is primarily intended for near-surface environments, such as urban areas, forests, and interior of the tunnel. However, there are also aspects of positioning, navigation and communication. One hand, in near-surface environments, GPS does not work often requires integrated inertial navigation, optics, acoustics, radar and terrain-matching technology, development of a reliable and accurate positioning and navigation technology, on the other, near-surface environment, terrain, sources of interference and current communication technology reliability, security and robustness of application still cannot meet the actual demand. Therefore, development of small volume, light weight, low power consumption, reliability and anti-jamming communication chain in four-rotors micro air vehicle technology (in particular the multi-aircraft coordination control technology) development, are crucial.微小型四旋翼飞行器发展的关键技术迄今为止,微小型四旋翼飞行器基础理论与实验研究已取得较大进展,但要真正走向成熟与实用,还面临着诸多关键技术的挑战。
毕业设计外文文献翻译

毕业设计外文文献翻译Graduation Design Foreign Literature Translation (700 words) Title: The Impact of Artificial Intelligence on the Job Market Introduction:Artificial Intelligence (AI) is a rapidly growing field that has the potential to revolutionize various industries and job markets. With advancements in technologies such as machine learning and natural language processing, AI has become capable of performing tasks traditionally done by humans. This has raised concerns about the future of jobs and the impact AI will have on the job market. This literature review aims to explore the implications of AI on employment and job opportunities.AI in the Workplace:AI technologies are increasingly being integrated into the workplace, with the aim of automating routine and repetitive tasks. For example, automated chatbots are being used to handle customer service queries, while machine learning algorithms are being employed to analyze large data sets. This has resulted in increased efficiency and productivity in many industries. However, it has also led to concerns about job displacement and unemployment.Job Displacement:The rise of AI has raised concerns about job displacement, as AI technologies are becoming increasingly capable of performing tasks previously done by humans. For example, automated machines can now perform complex surgeries with greaterprecision than human surgeons. This has led to fears that certain jobs will become obsolete, leading to unemployment for those who were previously employed in these industries.New Job Opportunities:While AI might potentially replace certain jobs, it also creates new job opportunities. As AI technologies continue to evolve, there will be a greater demand for individuals with technical skills in AI development and programming. Additionally, jobs that require human interaction and emotional intelligence, such as social work or counseling, may become even more in demand, as they cannot be easily automated.Job Transformation:Another potential impact of AI on the job market is job transformation. AI technologies can augment human abilities rather than replacing them entirely. For example, AI-powered tools can assist professionals in making decisions, augmenting their expertise and productivity. This may result in changes in job roles and the need for individuals to adapt their skills to work alongside AI technologies.Conclusion:The impact of AI on the job market is still being studied and debated. While AI has the potential to automate certain tasks and potentially lead to job displacement, it also presents opportunities for new jobs and job transformation. It is essential for individuals and organizations to adapt and acquire the necessary skills to navigate these changes in order to stay competitive in the evolvingjob market. Further research is needed to fully understand the implications of AI on employment and job opportunities.。
毕业设计外文原文加译文
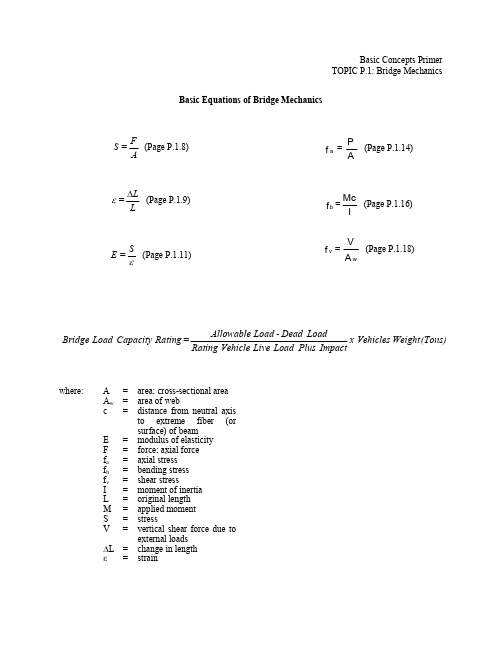
Basic Concepts PrimerTOPIC P.1: Bridge MechanicsBasic Equations of Bridge Mechanicswhere: A =area; cross-sectional areaA w = areaof web c = distance from neutral axisto extreme fiber (or surface) of beamE = modulus of elasticityF = force; axial force f a= axial stress f b= bending stress f v = shear stress I = moment of inertia L = original length M = applied moment S = stressV = vertical shear force due toexternal loadsD L = change in length e = strainBasic Concepts Primer Topic P.1 Bridge MechanicsP.1.1Introduction Mechanics is the branch of physical science that deals with energy and forces andtheir relation to the equilibrium, deformation, or motion of bodies. The bridgeinspector will primarily be concerned with statics, or the branch of mechanicsdealing with solid bodies at rest and with forces in equilibrium.The two most important reasons for a bridge inspector to study bridge mechanicsare:Ø To understand how bridge members functionØ To recognize the impact a defect may have on the load-carrying capacityof a bridge component or elementWhile this section presents the basic principles of bridge mechanics, the referenceslisted in the bibliography should be referred to for a more complete presentation ofthis subject.P.1.2Bridge Design Loadings Bridge design loadings are loads that a bridge is designed to carry or resist and which determine the size and configuration of its members. Bridge members are designed to withstand the loads acting on them in a safe and economical manner. Loads may be concentrated or distributed depending on the way in which they are applied to the structure.A concentrated load, or point load, is applied at a single location or over a very small area. Vehicle loads are considered concentrated loads.A distributed load is applied to all or part of the member, and the amount of load per unit of length is generally constant. The weight of superstructures, bridge decks, wearing surfaces, and bridge parapets produce distributed loads. Secondary loads, such as wind, stream flow, earth cover and ice, are also usually distributed loads.Highway bridge design loads are established by the American Association of State Highway and Transportation Officials (AASHTO). For many decades, the primary bridge design code in the United States was the AASHTO Standard Specifications for Highway Bridges (Specifications), as supplemented by agency criteria as applicable.During the 1990’s AASHTO developed and approved a new bridge design code, entitled AASHTO LRFD Bridge Design Specifications. It is based upon the principles of Load and Resistance Factor Design (LRFD), as described in Topic P.1.7.P.1.1SECTION P: Basic Concepts PrimerTopic P.1: Bridge MechanicsP.1.2Bridge design loadings can be divided into three principal categories:Ø Dead loadsØ Primary live loads Ø Secondary loadsDead LoadsDead loads do not change as a function of time and are considered full-time, permanent loads acting on the structure. They consist of the weight of the materials used to build the bridge (see Figure P.1.1). Dead load includes both the self-weight of structural members and other permanent external loads. They can be broken down into two groups, initial and superimposed.Initial dead loads are loads which are applied before the concrete deck is hardened, including the beam itself and the concrete deck. Initial deck loads must be resisted by the non-composite action of the beam alone. Superimposed dead loads are loads which are applied after the concrete deck has hardened (on a composite bridge), including parapets and any anticipated future deck pavement. Superimposed dead loads are resisted by the beam and the concrete deck acting compositely. Non-composite and composite action are described in Topic P.1.10.Dead load includes both the self-weight of the structural members and other permanent external loads.Example of self-weight: A 6.1 m (20-foot) long beam weighs 0.73 kN per m (50 pounds per linear foot). The total weight of the beam is 4.45 kN (1000 pounds). This weight is called the self-weight of the beam.Example of an external dead load: If a utility such as a water line is permanently attached to the beam in the previous example, then the weight of the water line is an external dead load. The weight of the water line plus the self weight of the beam comprises the total dead load.Total dead load on a structure may change during the life of the bridge due to additions such as deck overlays, parapets, utility lines, and inspection catwalks.Figure P.1.1 Dead Load on a BridgePrimary Live LoadsLive loads are considered part-time or temporary loads, mostly of short-term duration, acting on the structure. In bridge applications, the primary live loads are moving vehicular loads (see Figure P.1.2).To account for the affects of speed, vibration, and momentum, highway live loads are typically increased for impact. Impact is expressed as a fraction of the liveSECTION P: Basic Concepts PrimerTopic P.1: Bridge MechanicsP.1.3load, and its value is a function of the span length.Standard vehicle live loads have been established by AASHTO for use in bridge design and rating. It is important to note that these standard vehicles do not represent actual vehicles. Rather, they were developed to allow a relatively simple method of analysis based on an approximation of the actual live load.Figure P.1.2 Vehicle Live Load on a BridgeAASHTO Truck LoadingsThere are two basic types of standard truck loadings described in the current AASHTO Specifications . The first type is a single unit vehicle with two axles spaced at 14 feet (4.3 m) and designated as a highway truck or "H" truck (see Figure P.1.3). The weight of the front axle is 20% of the gross vehicle weight, while the weight of the rear axle is 80% of the gross vehicle weight. The "H" designation is followed by the gross tonnage of the particular design vehicle.Example of an H truck loading: H20-35 indicates a 20 ton vehicle with a front axle weighing 4 tons, a rear axle weighing 16 tons, and the two axles spaced 14 feet apart. This standard truck loading was first published in 1935.The second type of standard truck loading is a two unit, three axle vehicle comprised of a highway tractor with a semi-trailer. It is designated as a highway semi-trailer truck or "HS" truck (see Figure P.1.4).The tractor weight and wheel spacing is identical to the H truck loading. The semi-trailer axle weight is equal to the weight of the rear tractor axle, and its spacing from the rear tractor axle can vary from 4.3 to 9.1 m (14 to 30 feet). The "HS" designation is followed by a number indicating the gross weight in tons of the tractor only.SECTION P: Basic Concepts PrimerTopic P.1: Bridge MechanicsP.1.414’-0”(4.3 m)8,000 lbs (35 kN) 32,000 lbs (145 kN)(3.0 m)10’-0”CLEARANCE AND LOAD LANE WIDTH6’-0” (1.8 m)2’-0” (0.6 m)Figure P.1.3 AASHTO H20 Truck14’-0”(4.3 m)8,000 lbs (35 kN) 32,000 lbs (145 kN)(3.0 m)10’-0”CLEARANCE AND LOAD LANE WIDTH6’-0”(1.8 m)2’-0” (0.6 m)32,000 lbs (145 kN)VFigure P.1.4 AASHTO HS20 TruckExample of an HS truck loading: HS20-44 indicates a vehicle with a front tractor axle weighing 4 tons, a rear tractor axle weighing 16 tons, and a semi-trailer axle weighing 16 tons. The tractor portion alone weighs 20 tons, but the gross vehicle weight is 36 tons. This standard truck loading was first published in 1944.In specifications prior to 1944, a standard loading of H15 was used. In 1944, theSECTION P: Basic Concepts Primer Topic P.1: Bridge MechanicsP.1.5H20-44 Loading HS20-44 Loadingpolicy of affixing the publication year of design loadings was adopted. In specifications prior to 1965, the HS20-44 loading was designated as H20-S16-44, with the S16 identifying the gross axle weight of the semi-trailer in tons.The H and HS vehicles do not represent actual vehicles, but can be considered as "umbrella" loads. The wheel spacings, weight distributions, and clearance of the Standard Design Vehicles were developed to give a simpler method of analysis, based on a good approximation of actual live loads.The H and HS vehicle loads are the most common loadings for design, analysis, and rating, but other loading types are used in special cases.AASHTO Lane LoadingsIn addition to the standard truck loadings, a system of equivalent lane loadings was developed in order to provide a simple method of calculating bridge response to a series, or “train”, of trucks. Lane loading consists of a uniform load per linear foot of traffic lane combined with a concentrated load located on the span to produce the most critical situation (see Figure P.1.5).For design and load capacity rating analysis, an investigation of both a truck loading and a lane loading must be made to determine which produces the greatest stress for each particular member. Lane loading will generally govern over truck loading for longer spans. Both the H and HS loadings have corresponding lane loads.* Use two concentrated loads for negative moment in continuous spans (Refer to AASHTO Page 23)Figure P.1.5 AASHTO Lane Loadings.Alternate Military LoadingThe Alternate Military Loading is a single unit vehicle with two axles spaced at 1.2 m (4 feet) and weighing 110 kN (12 tons)each. It has been part of the AASHTO Specifications since 1977. Bridges on interstate highways or other highways which are potential defense routes are designed for either an HS20 loading or an Alternate Military Loading (see Figure P.1.6).SECTION P: Basic Concepts PrimerTopic P.1: Bridge MechanicsP.1.6110 kN (24 k)110 kN (24 k)Figure P.1.6 Alternate Military LoadingLRFD Live LoadsThe AASHTO LRFD design vehicular live load, designated HL-93, is a modified version of the HS-20 highway loadings from the AASHTO StandardSpecifications. Under HS-20 loading as described earlier, the truck or lane load is applied to each loaded lane. Under HL-93 loading, the design truck or tandem, in combination with the lane load, is applied to each loaded lane.The LRFD design truck is exactly the same as the AASHTO HS-20 design truck. The LRFD design tandem, on the other hand, consists of a pair of 110 kN axials spread at 1.2 m (25 kip axles spaced 4 feet) apart. The transverse wheel spacing of all of the trucks is 6 feet.The magnitude of the HL-93 lane load is equal to that of the HS-20 lane load. The lane load is 9 kN per meter (0.64 kips per linear foot) longitudinally and it is distributed uniformly over a 3 m (10 foot) width in the transverse direction. The difference between the HL-93 lane load and the HS-20 lane load is that the HL-93 lane load does not include a point load.Finally, for LRFD live loading, the dynamic load allowance, or impact, is applied to the design truck or tandem but is not applied to the design lane load. It is typically 33 percent of the design vehicle.Permit VehiclesPermit vehicles are overweight vehicles which, in order to travel a state’s highways, must apply for a permit from that state. They are usually heavy trucks (e.g., combination trucks, construction vehicles,or cranes) that have varying axle spacings depending upon the design of the individual truck. To ensure that these vehicles can safely operate on existing highways and bridges, most states require that bridges be designed for a permit vehicle or that the bridge be checked to determine if it can carry a specific type of vehicle. For safe and legal operation, agencies issue permits upon request that identify the required gross weight, number of axles, axle spacing, and maximum axle weights for a designated route (see Figure P.1.7).SECTION P: Basic Concepts PrimerTopic P.1: Bridge MechanicsP.1.7Figure P.1.7 910 kN (204 kip) Permit Vehicle (for Pennsylvania)Secondary LoadsIn addition to dead loads and primary live loads, bridge components are designed to resist secondary loads, which include the following:Ø Earth pressure - a horizontal force acting on earth-retaining substructureunits, such as abutments and retaining wallsØ Buoyancy -the force created due to the tendency of an object to rise whensubmerged in waterØ Wind load on structure - wind pressure on the exposed area of a bridge Ø Wind load on live load -wind effects transferred through the live loadvehicles crossing the bridgeØ Longitudinal force -a force in the direction of the bridge caused bybraking and accelerating of live load vehiclesØ Centrifugal force -an outward force that a live load vehicle exerts on acurved bridgeØ Rib shortening -a force in arches and frames created by a change in thegeometrical configuration due to dead loadØ Shrinkage - applied primarily to concrete structures, this is a multi-directional force due to dimensional changes resulting from the curing processØ Temperature -since materials expand as temperature increases andcontract as temperature decreases, the force caused by these dimensional changes must be consideredØ Earthquake -bridge structures must be built so that motion during anearthquake will not cause a collapseØ Stream flow pressure -a horizontal force acting on bridge componentsconstructed in flowing waterØ Ice pressure - a horizontal force created by static or floating ice jammedagainst bridge componentsØ Impact loading - the dynamic effect of suddenly receiving a live load;this additional force can be up to 30% of the applied primary live load forceØ Sidewalk loading - sidewalk floors and their immediate supports aredesigned for a pedestrian live load not exceeding 4.1 kN per square meter (85 pounds per square foot)Ø Curb loading -curbs are designed to resist a lateral force of not less than7.3 kN per linear meter (500 pounds per linear foot)Ø Railing loading -railings are provided along the edges of structures forprotection of traffic and pedestrians; the maximum transverse load appliedto any one element need not exceed 44.5 kN (10 kips)SECTION P: Basic Concepts PrimerTopic P.1: Bridge MechanicsP.1.8A bridge may be subjected to several of these loads simultaneously. The AASHTO Specifications have established a table of loading groups. For each group, a set of loads is considered with a coefficient to be applied for each particular load. The coefficients used were developed based on the probability of various loads acting simultaneously.P.1.3Material Response to LoadingsEach member of a bridge has a unique purpose and function, which directly affects the selection of material, shape, and size for that member. Certain terms are used to describe the response of a bridge material to loads. A working knowledge of these terms is essential for the bridge inspector.ForceA force is the action that one body exerts on another body. Force has two components: magnitude and direction (see Figure P.1.8). The basic English unit of force is called pound (abbreviated as lb.). The basic metric unit of force is called Newton (N). A common unit of force used among engineers is a kip (K), which is 1000 pounds. In the metric system, the kilonewton (kN), which is 1000 Newtons, is used. Note: 1 kip = 4.4 kilonewton.FyFigure P.1.8 Basic Force ComponentsStressStress is a basic unit of measure used to denote the intensity of an internal force. When a force is applied to a material, an internal stress is developed. Stress is defined as a force per unit of cross-sectional area.The basic English unit of stress is pounds per square inch (abbreviated as psi). However, stress can also be expressed in kips per square inch (ksi) or in any other units of force per unit area. The basic metric unit of stress is Newton per square meter, or Pascal (Pa). An allowable unit stress is generally established for a given material. Note: 1 ksi = 6.9 Pa.)A (Area )F (Force )S (Stress =毕业设计外文译文桥梁力学基本概论《美国桥梁检测手册》译文:桥梁结构的基础方程S=F/A(见1.8节)fa=P/A(见1.14节)ε=△L/L(见1.9节)fb=Mc/I(见1.16节)E=S/ε(见1.11节)fv=V/Aw(见1.18节)桥梁额定承载率=(允许荷载–固定荷载)*车辆总重量/车辆活荷载冲击力式中:A=面积;横截面面积Aw=腹板面积c=中性轴与横梁边缘纤维或外表面之间的距离E=弹性模量F=轴心力;轴向力fa=轴向应力fb=弯曲应力fv=剪切应力I=惯性距L=原长M=作用力距S=应力V=由外荷载引起的垂直剪应力△L=长度变量ε=应变1桥梁主要的基本概论第一章桥梁力学1.1引言结构力学是研究物体的能量、力、能量和力的平衡关系、变形及运动的物理科学的分支。
毕业设计 翻译

毕业设计翻译Graduation Project - Translation (700 words)Title: The Impact of Artificial Intelligence on Modern Society Introduction:Artificial Intelligence (AI) has become an integral part of our lives in the modern world. Its development and applications have brought significant changes and advancements in various industries. This paper aims to explore the impact of AI on modern society, focusing on its benefits and challenges.Body:1. Benefits of AI:AI has revolutionized various industries and brought numerous benefits to modern society.- Improved efficiency: AI can perform complex tasks quickly and accurately, leading to increased productivity in sectors such as manufacturing, healthcare, and finance.- Enhanced safety: AI-powered systems can detect and prevent potential threats, ensuring the safety of individuals and organizations.- Personalized experiences: AI algorithms can analyze user data and deliver personalized recommendations, enhancing user experiences in sectors like e-commerce and entertainment.- Medical advancements: AI has significantly contributed to the field of medicine, from disease diagnosis to drug development, improving healthcare outcomes and saving lives.2. Challenges of AI:Despite the numerous benefits, AI also poses several challenges to modern society.- Job displacement: AI automation can lead to job losses, especially in sectors that heavily rely on repetitive tasks. This calls for retraining and upskilling of the workforce to adapt to the changing job market.- Ethical concerns: AI systems raise ethical dilemmas, such as privacy invasion and bias in decision-making. Proper regulations and ethical frameworks need to be in place to address these concerns.- Economic inequality: The adoption of AI technologies may widen the economic gap between those who have access to these technologies and those who do not. Ensuring equal access and opportunities for all is crucial to avoid exacerbating socioeconomic inequalities.- Security risks: As AI becomes more sophisticated, the risk of cyberattacks and misuse of AI technologies increases. Strengthening cybersecurity measures and ensuring responsible use of AI are necessary to mitigate these risks.Conclusion:The impact of AI on modern society is undeniable, with its benefits ranging from increased efficiency to improved healthcare outcomes. However, challenges such as job displacement, ethical concerns, economic inequality, and security risks need to be addressed to maximize the positive impact of AI while minimizing its negative consequences. It is crucial for policymakers, businesses, and individuals to work together to ensure the responsible and ethical development and usage of AI for the betterment of society.。
毕业设计翻译

The elucidation of the Single-chip一、Single-chip applicationsAt present, single-chip microcomputer to infiltrate all areas of our lives, which is very difficult to find the area of almost no traces of single-chip microcomputer. Missile navigation equipment, aircraft control on a variety of instruments, computer network communications and data transmission, industrial automation, real-time process control and data processing, are widely used in a variety of smart IC card, limousine civilian security systems, video machines, cameras, control of automatic washing machines, as well as program-controlled toys, electronic pet, etc., which are inseparable from the single-chip microcomputer. Not to mention the field of robot automation, intelligent instrumentation, medical equipment has been. Therefore, the single-chip learning, development and application to a large number of computer applications and intelligent control of scientists, engineers.Single-chip widely used in instruments and meters, household appliances, medical equipment, aerospace, specialized equipment and the intelligent management in areas such as process control.In addition, single-chip microcomputer in the industrial, commercial, financial, scientific research, education, defense aerospace and other fields have a wide range of uses.二、AT89C51 descriptionThe AT89S52 is a low-power, high-performance CMOS 8-bit microcontroller with 8K bytes of in-system programmable Flash memory. The device is manufacturedusing Atmel’s high-density nonvolatile memory technology and is compatible with the indus-try-standard 80C51 instruction set and pinout. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory pro-grammer. By combining a versatile 8-bit CPU with in-system programmable Flash on a monolithic chip, the Atmel AT89S52 is a powerful microcontroller which provides a highly-flexible and cost-effective solution to many embedded control applications.The AT89S52 provides the following standard features: 8K bytes of Flash, 256 bytes of RAM, 32 I/O lines, Watchdog timer, two data pointers, three 16-bit timer/counters, a six-vector two-level interrupt architecture, a full duplex serial port, on-chip oscillator, and clock circuitry. In addition, the AT89S52 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port, and interrupt system to continue functioning. The Power-down mode saves the RAM con-tents but freezes the oscillator, disabling all other chip functions until the next interrupt or hardware reset.三、Pin DescriptionVCC:Supply voltage.GND:Ground.Port 0:Port 0 is an 8-bit open-drain bi-directional I/O port. As an output port, each pin can sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as high-impedance inputs. Port 0 may also be configured to be the multiplexed low-orderaddress/data bus during accesses to external program and data memory. In this mode P0 has internal pull-ups. Port 0 also receives the code bytes during Flash programming, and outputs the code bytes during program-verification. External pull-ups are required during program-verification.Port 1:Port 1 is an 8-bit bi-directional I/O port with internal pull-ups. The Port 1 output buffers can sink/source four TTL inputs. When 1s are written to Port 1 pins they are pulled high by the internal pull-ups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pull-ups. Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2Port 2 is an 8-bit bi-directional I/O port with internal pull-ups. The Port 2 output buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins they are pulled high by the internal pull-ups and can be used as inputs.As inputs, Port 2 pins that are externally being pulled low will source current, because of the internal pull-ups. Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses. In this application, it uses strong internal pull-ups when emitting 1s. During accesses to external data memory that use 8-bit addresses, Port 2 emits the contents of the P2 Special Function Register. Port 2 also receives the high-order address bits and some control signals during Flash programming and verification. Port 3Port 3 is an 8-bit bi-directional I/O port with internal pull-ups. The Port 3 output buffers can sink/source four TTL inputs. When 1s are written to Port 3 pins they are pulled high by the internal pull-ups and can be used as inputs. As inputs, Port 3 pins that are externally being pulled low will source current (IIL) because of the pull-ups. Port 3 also serves the functions of various special features of the AT89C51 as listed below:Port 3 also receives some control signals for Flash programming and verification. RSTReset input. A high on this pin for two machine cycles while the oscillator is running resets the device.ALE/PROGAddress Latch Enable output pulse for latching the low byte of the address during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming. In normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency, and may be used for external timing or clocking purposes. Note, however, that one ALE pulse is skipped during each access to external Data Memory.If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSENProgram Store Enable is the read strobe to external program memory. When theAT89C51 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSEN activations are skipped during each access to external data memory.EA/VPPExternal Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset EA should be strapped to VCC for internal program executions. This pin also receives the 12-volt programming enable V oltage(VPP) during Flash programming, for parts that require12-volt VPP.XTAL1Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1.Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2.There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.四、Memory OrganizationMCS-51 devices have a separate address space for Program and Data Memory. Up to 64K bytes each of external Program and Data Memory can be addressed.4.1 Program MemoryIf EA --------pin is connected to GND, all program fetches are directed to external memory. On the AT89S52, if EA -------- is connected to VCC, program fetches to addresses 0000H through 1FFFH are directed to internal memory and fetches to addresses H through FFFFH are to external memory.4.2 Data MemoryThe AT89S52 implements 256 bytes of on-chip RAM. The upper 128 bytes occupy a parallel address space to the Special Function Registers. This means that the upper 128 bytes have the same addresses as the SFR space but are physically separate from SFR space. When an instruction accesses an internal location above address 7FH, the address mode used in the instruction specifies whether the CPU accesses the upper 128 bytes of RAM or the SFR space. Instructions which use direct addressing access the SFR space. For example, the following direct addressing instruction accesses the SFR at location 0A0H (which is P2).MOV 0A0H, #dataInstructions that use indirect addressing access the upper 128 bytes of RAM. For example, the following indirect addressing instruction, where R0 contains 0A0H, accesses the data byte at address 0A0H, rather than P2 (whose address is 0A0H).MOV @R0, #dataNote that stack operations are examples of indirect addressing, so the upper 128bytes of data RAM are available as stack space.五、Watchdog Timer (One-time Enabled with Reset-out)The WDT is intended as a recovery method in situations where the CPU may be subjected to software upsets. The WDT consists of a 14-bit counter and the Watchdog Timer Reset (WDTRST) SFR. The WDT is defaulted to disable from exiting reset. To enable the WDT, a user must write 01EH and 0E1H in sequence to the WDTRST register (SFR location 0A6H). When the WDT is enabled, it will increment every machine cycle while the oscillator is running. The WDT timeout period is dependent on the external clock frequency. There is no way to disable the WDT except through reset (either hardware reset or WDT overflow reset). When WDT over-flows, it will drive an output RESET HIGH pulse at the RST pin.5.1 Using the WDTTo enable the WDT, a user must write 01EH and 0E1H in sequence to the WDTRST register (SFR location 0A6H). When the WDT is enabled, the user needs to service it by writing 01EH and 0E1H to WDTRST to avoid a WDT overflow. The 14-bit counter overflows when it reaches 16383 (3FFFH), and this will reset the device. When the WDT is enabled, it will increment every machine cycle while the oscillator is running. This means the user must reset the WDT at least every 16383 machine cycles. To reset the WDT the user must write 01EH and 0E1H to WDTRST. WDTRST is a write-only register. The WDT counter cannot be read or written. When WDT overflows, it will generate an output RESET pulse at the RST pin. The RESET pulse dura-tion is 98xTOSC, where TOSC = 1/FOSC. To make the best use of the WDT, it should be serviced in those sections of code that will periodically be executed within the time required to prevent a WDT reset.5.2 WDT During Power-down and IdleIn Power-down mode the oscillator stops, which means the WDT also stops. While in Power-down mode, the user does not need to service the WDT. There are two methods of exiting Power-down mode: by a hardware reset or via a level-activated external interrupt which is enabled prior to entering Power-down mode. When Power-down is exited with hardware reset, servicing the WDT should occur as it normally does whenever the AT89S52 is reset. Exiting Power-down with an interrupt is significantly different. The interrupt is held low long enough for the oscillator to stabilize. When the interrupt is brought high, the interrupt is serviced. To prevent the WDT from resetting the device while the interrupt pin is held low, the WDT is not started until the interrupt is pulled high. It is suggested that the WDT be reset during the interrupt service for the interrupt used to exit Power-down mode. To ensure that the WDT does not overflow within a few states of exiting Power-down, it is best to reset the WDT just before entering Power-down mode. Before going into the IDLE mode, the WDIDLE bit in SFR AUXR is used to determine whether the WDT continues to count if enabled. The WDT keeps counting during IDLE (WDIDLE bit = 0) as the default state. To prevent the WDT from resetting the AT89S52 while in IDLE mode, the user should always set up a timer that will periodically exit IDLE, service the WDT, and reenter IDLE mode. With WDIDLE bit enabled, the WDT will stop to count in IDLE mode and resumes the count upon exit from IDLE.六、UARTThe UART in the AT89S52 operates the same way as the UART in the AT89C51 and AT89C52.七、Timer 0 and 1Timer 0 and Timer 1 in the AT89S52 operate the same way as Timer 0 and Timer1 in the AT89C51 and AT89C52.八、Timer 2Timer 2 is a 16-bit Timer/Counter that can operate as either a timer or an event counter. The type of operation is selected by bit C/T-----2 in the SFR T2CON. Timer 2 has three operating modes: capture, auto-reload (up or down counting), and baud rate generator. The modes are selected by bits in T2CON, as shown in Table 6-1. Timer 2 consists of two 8-bit registers, TH2 and TL2. In the Timer function, the TL2 register is incremented every machine cycle. Since a machine cycle consists of 12 oscillator periods, the count rate is 1/12 of the oscil-lator frequency.In the Counter function, the register is incremented in response to a 1-to-0 transition at its corre-sponding external input pin, T2. In this function, the external input is sampled during S5P2 of every machine cycle. When the samples show a high in one cycle and a low in the next cycle, the count is incremented. The new count value appears in the register during S3P1 of the cycle following the one in which the transition was detected. Since two machine cycles (24 oscillator periods) are required to recognize a 1-to-0 transition, the maximum count rate is 1/24 of the oscillator frequency. To ensure that a given level is sampled at least once before it changes, the level should be held for at least one full machine cycle.8.1 Capture ModeIn the capture mode, two options are selected by bit EXEN2 in T2CON. If EXEN2 = 0, Timer 2 is a 16-bit timer or counter which upon overflow sets bit TF2 in T2CON. This bit can then be used to generate an interrupt. If EXEN2 = 1, Timer 2 performs the same operation, but a 1-to-0 transi-tion at external input T2EX alsocauses the current value in TH2 and TL2 to be captured into RCAP2H and RCAP2L, respectively. In addition, the transition at T2EX causes bit EXF2 in T2CON to be set. The EXF2 bit, like TF2, can generate an interrupt.8.2 Auto-reload (Up or Down Counter)Timer 2 can be programmed to count up or down when configured in its 16-bit auto-reload mode. This feature is invoked by the DCEN (Down Counter Enable) bit located in the SFR T2MOD . Upon reset, the DCEN bit is set to 0 so that timer 2 will default to count up. When DCEN is set, Timer 2 can count up or down, depending on the value of the T2EX pin. Timer 2 automatically counting up when DCEN = 0. In this mode, two options are selected by bit EXEN2 in T2CON. If EXEN2 = 0, Timer 2 counts up to 0FFFFH and then sets the TF2 bit upon overflow. The overflow also causes the timer registers to be reloaded with the 16-bit value in RCAP2H and RCAP2L. The values in Timer in Capture ModeRCAP2H and RCAP2L are preset by software. If EXEN2 = 1, a 16-bit reload can be triggered either by an overflow or by a 1-to-0 transition at external input T2EX. This transition also sets the EXF2 bit. Both the TF2 and EXF2 bits can generate an interrupt if enabled. Setting the DCEN bit enables Timer 2 to count up or down, as shown in Figure 10-2. In this mode, the T2EX pin controls the direction of the count. A logic 1 at T2EX makes Timer 2 count up. The timer will overflow at 0FFFFH and set the TF2 bit. This overflow also causes the 16-bit value in RCAP2H and RCAP2L to be reloaded into the timer registers, TH2 and TL2, respectively. A logic 0 at T2EX makes Timer 2 count down. The timer underflows when TH2 and TL2 equal the values stored in RCAP2H and RCAP2L. The underflow sets the TF2 bit and causes 0FFFFH to be reloaded into the timer registers. The EXF2 bit toggles whenever Timer 2 overflows or underflows and canbe used as a 17th bit of resolution. In this operating mode, EXF2 does not flag an interrupt.九、Baud Rate GeneratorTimer 2 is selected as the baud rate generator by setting TCLK and/or RCLK in T2CON. Note that the baud rates for transmit and receive can be different if Timer 2 is used for the receiver or transmitter and Timer 1 is used for the other function. Setting RCLK and/or TCLK puts Timer 2 into its baud rate generator mode. The baud rate generator mode is similar to the auto-reload mode, in that a rollover in TH2 causes the Timer 2 registers to be reloaded with the 16-bit value in registers RCAP2H and RCAP2L, which are preset by software. The baud rates in Modes 1 and 3 are determined by Timer 2’s overflow rate according to the fol-lowing equation.The Timer can be configured for either timer or counter operation. In most applications, it is con-figured for timer operation (CP/T-----2 = 0). The timer operation is different for Timer 2 when it is used as a baud rate generator. Normally, as a timer, it increments every machine cycle (at 1/12 the oscillator frequency). As a baud rate generator, however, it increments every state time (at 1/2 the oscillator frequency).十、ammable Clock OutA 50% duty cycle clock can be programmed to come out on P1.0. This pin, besides being a regular I/O pin, has two alternate functions. It can be programmed to input the external clock for Timer/Counter 2 or to output a 50% duty cycle clock ranging from 61 Hz to 4 MHz (for a 16-MHz operating frequency). To configure the Timer/Counter 2 as a clock generator, bit C/T-------2 (T2CON.1) must be cleared and bit T2OE (T2MOD.1) must be set. Bit TR2 (T2CON.2) starts and stops the timer. Theclock-out frequency depends on the oscillator frequency and the reload value of Timer 2 capture registers (RCAP2H, RCAP2L), as shown in the following equation.In the clock-out mode, Timer 2 roll-overs will not generate an interrupt. This behavior is similar to when Timer 2 is used as a baud-rate generator. It is possible to use Timer 2 as a baud-rate gen-erator and a clock generator simultaneously. Note, however, that the baud-rate and clock-out frequencies cannot be determined independently from one another since they both use RCAP2H and RCAP2L. 十一、InterruptsThe AT89S52 has a total of six interrupt vectors: two external interrupts (INT0------------and INT1------------), three timer interrupts (Timers 0, 1, and 2), and the serial port interrupt. Each of these interrupt sources can be individually enabled or disabled by setting or clearing a bit in Special Function Register IE. IE also contains a global disable bit, EA, which disables all interrupts at once. Note that bit position IE.6 is unimplemented. User software should not write a 1 to this bit position, since it may be used in future AT89 products. Timer 2 interrupt is generated by the logical OR of bits TF2 and EXF2 in register T2CON. Nei-ther of these flags is cleared by hardware when the service routine is vectored to. In fact, the service routine may have to determine whether it was TF2 or EXF2 that generated the interrupt, and that bit will have to be cleared in software. The Timer 0 and Timer 1 flags, TF0 and TF1, are set at S5P2 of the cycle in which the timers overflow. The values are then polled by the circuitry in the next cycle. However, the Timer 2 flag, TF2, is set at S2P2 and is polled in thesame cycle in which the timer overflows.十二、Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier that can be configured for use as an on-chip oscillator. Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven,. There are no requirements on the duty cycle of the external clock signal, since the input to the internal clock-ing circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.十三、Idle ModeIn idle mode, the CPU puts itself to sleep while all the on-chip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions regis-ters remain unchanged during this mode. The idle mode can be terminated by any enabled interrupt or by a hardware reset. Note that when idle mode is terminated by a hardware reset, the device normally resumes pro-gram execution from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write to a port pin when idle mode is terminated by a reset, the instruction following the one that invokes idle mode should not write to a port pin or to external memory.十四、Power-down ModeIn the Power-down mode, the oscillator is stopped, and the instruction thatinvokes Power-down is the last instruction executed. The on-chip RAM and Special Function Registers retain their values until the Power-down mode is terminated. Exit from Power-down mode can be initiated either by a hardware reset or by an enabled external interrupt. Reset redefines the SFRs but does not change the on-chip RAM. The reset should not be activated before VCC is restored to its normal operating level and must be held active long enough to allow the oscillator to restart and stabilize.翻译段落:设计阐明一、单片机应用目前,单片机渗透到我们生活旳各个领域,这是非常难以找到面积几乎没有残留旳单片机。