一种液压自动猫道在钻井作业现场的试验及分析
石油钻机猫道自动化控制探讨

石油钻机猫道自动化控制探讨随着目前我国大量油田的开采,要求积极优化钻机的使用方式。
石油钻机猫道自动化控制体系在目前很多油井开采过程中均得到了大量使用,本文对此进行了优化设计与案例分析。
1石油钻机自动化猫道优化设计1.1优化送钻柱装置构成送钻柱装置的结构主要包括主动链轮总成、安全销总成、小滑车、调节顶丝、液压驱动马达、被动链轮总成、传送本体、链条、踢出机构等部分。
管柱前进、后退工作主要是通过送钻柱装置实现的,在系统运行过程中,送钻柱装置中部V形槽中放置管柱,将安全销放置在送钻柱装置传送本体两侧位置处,以此使得管柱不会从V形槽中滚落。
通过小滑车前后运动来实现管柱的移动工作。
在拉杆的作用之下,连接链条与小滑车,在链轮转动之下促进链条活动,以此来实现小滑车的运动[1]。
1.2设置技术参数石油钻机猫道自动化控制过程中设置13.5m运输管柱最大长度,具有12~12.2m适应钻台面高度,具有508mm(20″)运输管柱最大直径、55kW最大输出功率、32880kg自重、-20~+50℃环境温度,45kN最大工作负荷、120s单根运行周期、≤90%(+20℃)相对湿度要求[2]。
1.3工作原理动力猫道具有6个部件,分别为支架、送钻柱装置、液压系统、坡道、猫道底座、绳双动绞车等。
工作时,固定于坡道背面的绳双动绞车能够带动钢丝绳在坡道顶部位置滑动,从而促进送钻柱装置在坡道方向上运动,一直到送钻柱装置能够运行至送钻柱装置,此时停止绳双动绞车运行。
利用送钻柱装置中的小滑车促进管柱前进,利用风动绞车或者顶驱等提取钻柱,此时即完成管柱提升作业。
液压站能够为小滑车与绳双动绞车提供动力,通过液压站控制系统、遥控系统即可完成整体动作过程。
系统中,坡道的构成部分为滑轮总成、坡道本体、顶滚轮总成等。
以钢丝绳导绳轮作为坡道上部的双滑轮,顶滚轮总成结构处于坡道本体上方位置,能够促进送钻柱装置向上运动以及向下运动。
猫道底座组成部分为排管架总成、托链槽、底座本体、倾斜机构、梯子等部件。
动力猫道装置的研制
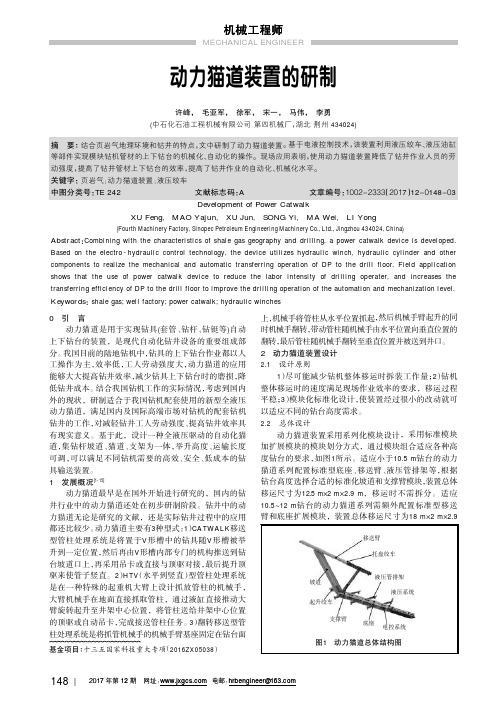
动强度,提高了钻井管材上下钻台的效率,提高了钻井作业的自动化、机械化水平。
关键字:页岩气;动力猫道装置;液压绞车
中图分类号:TE 242
文献标志码:A
文章编号:员园园圆原圆猿猿猿(圆园员7)12原园148原园3
Development of Power Catwalk
XU Feng, MAO Yajun, XU Jun, SONG Yi, MA Wei, LI Yong
shows that the use of power catwalk device to reduce the labor intensity of drilling operater, and increases the
transferring efficiency of DP to the drill floor to improve the drilling operation of the automation and mechanization level.
Based on the electro -hydraulic control technology, the device utilizes hydraulic winch, hydraulic cylinder and other
components to realize the mechanical and automatic transferring operation of DP to the drill floor. Field application
动力猫道最早是在国外开始进行研究的,国内的钻 井行业中的动力猫道还处在初步研制阶段。钻井中的动 力猫道无论是研究的文献,还是实际钻井过程中的应用 都还比较少。动力猫道主要有3种型式:1)CATWALK移送 型管柱处理系统是将置于V形槽中的钻具随V形槽被举 升到一定位置,然后再由V形槽内部专门的机构推送到钻 台坡道口上,再采用吊卡或直接与顶驱对接,最后提升顶 驱来使管子竖直。2)HTV(水平到竖直)型管柱处理系统 是在一种特殊的起重机大臂上设计抓放管柱的机械手, 大臂机械手在地面直接抓取管柱,通过液缸直接推动大 臂旋转起升至井架中心位置,将管柱送给井架中心位置 的顶驱或自动吊卡,完成接送管柱任务。3)翻转移送型管 柱处理系统是将抓管机械手的机械手臂基座固定在钻台面
托举式液压动力猫道钻井现场使用分析及优化方案
276随着国内石油钻机制造技术的快速发展以及机械化自动化技术的大量运用,较多的钻机自动化配套设备逐步进入到我国钻井现场。
尤其是动力猫道投入使用大大提高了钻具、套管的上下钻台操作可靠性与安全性。
未使用动力猫道的现场操作需要3~4名工人进行操作,操作上效率较低,安全上风险较大,劳动强度极高,对钻具损坏的程度高,尤其是夜间施工时视线不佳,严重影响接甩钻具施工进度。
与此同时,在进行下套管作业时需要吊车介入配合,大大增加了整个施工过程的风险性。
动力猫道投入使用之后,极大程度上解决了过去传统猫道的各项弊端,在能够高效安全完成接甩钻具工作之外,个别厂家的动力猫道同样可以投入到下套管施工当中。
这对钻井现场施工的效率提升,安全管控起到了极大的作用。
笔者所在钻井现场配有托举式液压猫道的70DB钻机,现就该类型动力猫道现场使用过程中发现的问题一一举出,将操作中的经验与设备优化的思路进行分享。
1 动力猫道类别通过大量文献的查阅,归纳出3类国内外使用的动力猫道类型。
1.1 推送式固定猫道 其猫道与坡道是固定结构,在猫道与坡道中设有V型槽轨。
利用链动装置推送V型槽轨中的滑块,从而达到推送V型槽轨中钻具上行至钻台的目的。
其优势在于机械结构相对简单,保养方便。
其缺点在于钻具在V型槽轨中滑动,摩擦力较大,对钻具的损坏程度较高[2]。
1.2 自动化机械抓臂自动化机械抓臂准确来说并不能称其为“猫道”,但其行使的职责与动力猫道相同,故笔者将其归于此类。
自动化机械抓臂的出现,使得传统猫道与坡道被取消,实现了钻具从管桥与钻台的直接运送。
自动化机械抓臂常适用于海上钻井平台或有对井场空间有特殊要求的陆地钻井平台。
其优点在于直接运送效率高,速度快,且安全。
但缺点在于安装程序复杂,维护困难,采购成本高且严重影响井队搬家的时效[3]。
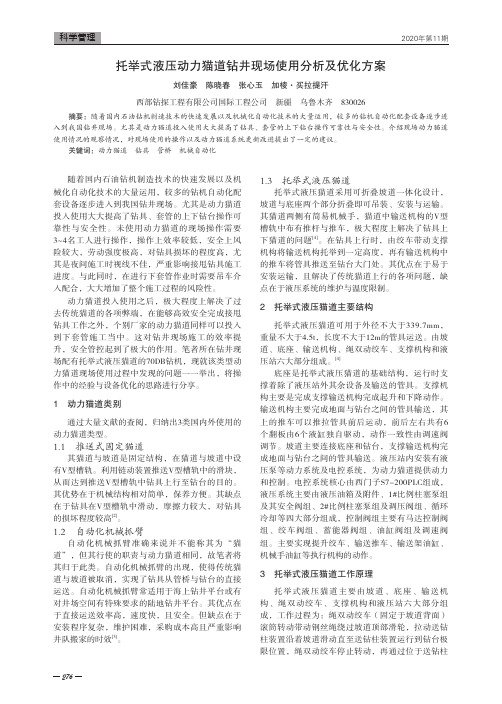
1.3 托举式液压猫道托举式液压猫道采用可折叠坡道一体化设计,坡道与底座两个部分折叠即可吊装、安装与运输。
其猫道两侧有简易机械手,猫道中输送机构的V型槽轨中布有推杆与推车,极大程度上解决了钻具上下猫道的问题[4]。
一种石油钻机自动猫道遥控器控制系统

一种石油钻机自动猫道遥控器控制系统作者:丁亮来源:《电子技术与软件工程》2017年第21期摘要随着人力成本的不断增加,钻井自动化已成为钻机发展的迫切需求,自动猫道逐渐成为钻井设备的必需设备。
常规自动猫道操作需要在本体上操作,钻台面上有人指挥,配合司钻操作顶驱。
为此,本文设计了一套自动猫道的控制方法,将遥控器的交互信号传入猫道控制的PLC。
这样猫道控制人员可以在钻台面上操作,由于钻台面可以同时观察到钻台面的设备操作和猫道本体的情况,猫道操作人员可以根据钻台面司钻的操作配合猫道的操作,保证钻具顺利快速的安装和卸载。
遥控器由发送器和接收器组成,接收器接收到的信号转换成CAN信号,本设计采用CAN/PROFIBUS协议转换器将CAN信号接入PLC的PROFIBUS通讯系统,和PLC交换信息。
本设计保证了钻具操作的可靠性和流畅性,节省了人力,为钻机的自动化和智能化提供了新颖的控制方式。
【关键词】自动猫道遥控器 PLC 自动化石油钻井智能化、自动化、信息化是钻井的发展方向,自动猫道也是钻井自动化的重要组成部分。
当前市场上使用的自动猫道,多数是进口自动猫道,由国内自主研发的猫道仍占很少的一部分,并且多数未经过现场测试使用。
关于自动猫道的遥控器,因为其具有防爆要求,目前国内研发的猫道很多都是采用进口的遥控器,比如CAVOTEC、HBC等,国外进口遥控器价格高昂,没有针对性,面板功能太多且操作繁琐。
这些都会影响猫道操作的流畅可靠,操作员不得不花时间熟悉遥控器,无形中增加了猫道的操作失误率。
本项目采用国内公司生产的遥控器,根据猫道的操作要求定制,能满足猫道操作的特殊要求,提供了一种方便可靠,携带方便、不易误操作的猫道遥控器系统,能满足钻台面操作猫道的需求。
目前已经在井队测试使用,提高了钻井效率,达到了理想的效果。
1 无线遥控工作原理无线遥控开关时由发射器、接收器和执行机构组成。
发射器主要包括编码电路和发射电路。
编码电路由操纵器(操纵开关或电位计)控制,操纵者通过操纵器,使编码电路产生需要的控制指令,这些控制指令时具有某些特征的、相互间易于区分的电信号。
液压动力猫道系统的机构设计与分析

这 样 就形 成
个 完 整 的循环 操
进
动 化 机 械操 作 动力 猫道 其 三 种 中 间
一
自
,
动化 集成 程度 最 高
这
一
,
,
那么这
一
液 压猫 道 系 统也 可 以 将钻 杆 的 机 械操作 平 均 分布 于 每
,
且 制 作 也是 最为 精 密 的
种 动 力 猫 道技 术
。
从 而 推动
地 表 地磁 震 荡 技术 以 及 地 下 钻 井 探测 等技 术
,
。
地 下钻 井
一
杠 杆进 行上 下 牵 引 作 用
.
技 术 可 以 把 地下 的 物 质提 取 出 来
。
从 而 方 便科学 家 进 行进
步 的 分 2 管 道 传 送 装 置
、
这样 能够 更加 方便 的 得 到 大 陆 深 处 的 地 质 构 成 以 及得 到 液 压 管 道传 送装 置 主 要 是滑 轮 机 组
目前
汽缸
用
。
,
通 过 液 压 汽 缸 的 机械 作 用 来 控制 钻 杆 上 的 前进 滑 轮 的 机 械作
,
世界 上 流 行 的 针对 于 对陆 地 的 探查 方 法 主 要 有 无 人机 航磁 地下 物 质 探测 技术 析和了解
,
整 个机 械操 作 为 翘 板通 过两 端 液压 汽缸 来进 行活 动
。
在 参照 了
前 主流 的 动 力 猫 道结 构 系 统 以 后
。
,
对 于创 液压猫
管 道 输 送 通道 以 及机 械装 置 和 输送 牵 引 装 置 等 部 分组 成 其 中 主 题 猫 道 又 分为 两个 装 置 这 两 个 装 置 中 间 是 利 用 钢 丝 螺 帽 来 进 行衔
浅谈自动化猫道设计在石油钻机上的应用

264引言随着我国机械自动化水平的逐步提高,我国石油钻机行业的自动化程度也取得了明显的进步,石油钻机的主体配套设备已经到了国际水平,但是石油钻机的外围配套设备还基本处在20世纪60—70年代的水平,劳动强度大,危险系数高。
我国应加强对石油钻机配套设施的整体机械自动化水平的研究和投入,解决现实生产问题,自动化猫道技术的研究和应用,可提高钻机的作业效率,增强石油钻机配套设备的安全性和自动化水平。
1 石油钻机配套设施现状研究目前,钻机在钻井过程中的钻具排放及上、下钻台的操作都比较落后,上、下钻具均以人工操作配合钻台及其猫道上的气动绞车拉、拽的方式作业,具体的操作过程如下所示:钻具上钻台操作过程:第一步先将钻具将钻杆架推入猫道上,在钻台上面利用气动绞车下放钢丝绳挂住钻具的顶部,借用索具将钻具沿着猫道提升至钻台面,让后工人利用铁钩挂住钻具底部,送到小鼠洞中,然后用吊卡卡住钻具,吊环勾住吊卡,将钻具提起后送入井口。
下钻具的操作过程:第一部是利用气动绞车挂住钻具顶端,借用猫道上的气动绞车钩住钻具底部,把钻具拉入坡道,并沿坡道滑入猫道中,使用两部气动绞车将钻具滑向了猫道的尾部。
拆掉两部气动绞车的钢丝绳,人工将钻具从猫道上推回至钻杆的排放架上面。
2 自动化猫道的工作原理通过对钻机在钻井过程中的钻具排放及上、下钻台的操作过程的研究,并结合国内外自动化猫道的发展,从送钻具上钻台和下放钻具两个方面总结了自动化猫道的工作原理。
(1)钻具上钻台过程:在低位条件下,猫道主体中的云梁处在水平的位置,钻杆的排放架支脚液缸可以伸出将排放架一端升起后,使钻具利用自身的重力,顺着排放架的斜面朝向猫道主体滚动。
当钻具滚动到排放架的限位销处后可被卡住,在这种情况下,靠近钻具一侧的拨板液缸可伸出,将拨板顶起,使得限位销附近的钻具抬起,当钻具的高度升至大于限位销的高度以后,钻具可沿拨板斜面滚动至云梁的凹槽内。
此时安全销气缸将安全销压出,主液缸伸出,推动前支架,将云梁升高,到达限定位置后,主动系统内的双向液压马达开始运转,驱动链轮运动,带动小车推动钻具前进到井口位置,使吊卡卡住钻具的顶端,完成钻具上钻台的过程。
自动化猫道设计在石油钻机上的应用研究
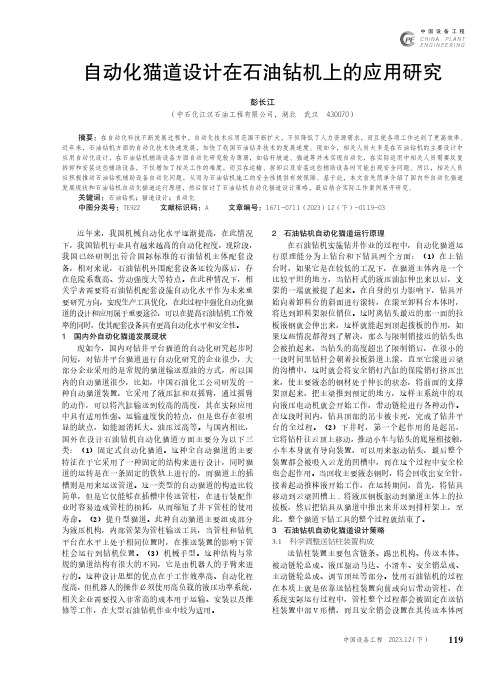
自动化猫道设计在石油钻机上的应用研究
图1 动力猫道示意图
电气控制系统
在运动系统时保证参数合理非常重要,设置
的控制单元,75kW、380V/50Hz
电源。
在控制系统监控工作方面,相关人员应努力做到稳定性高和效率高,以西门子PLC相应的无线控制标准为依据,对司钻一体化控制、紧急控制、无线遥控等综合控制模式进行科学安排。
控制器运转时,若发生局部故障,则当系统具进行顶驱作业,并将钻杆下入V形槽。
当所有的钻杆型槽后,确认它和挡板非常接近时才将吊卡打开。
在这个过程中,钻杆一定要移动到与V形槽完全接触的位置。
然后,根据系统的操作规程来启动双动绞车,根据实际的使用要求将送钻柱装置降到与猫道水平面相齐的位置。
之后,根据标准进行安全销作业,作业结束后再收回。
根据说明书,并且把钻杆从V形槽中推出来。
最后,为了保证内倾斜机构稳定运行,务必将钻杆推到管排架处,然后将内倾斜机构调整到初始状态。
踢出机所示。
图3 踢出机构示意图
石油钻机自动化猫道设计应用案例
在开采某油井时相关人员使用了石油钻机猫道自动化设计方式,该油井具有如表1所示的井身结构。
表1 井身结构情况
套管外
(mm)
固井井
深(m)
水泥封固
井端(m)
套管鞋
深度(m)
层位
固井
井眼
直径
(mm)
139.77417.8
6500~
7417.8
6800.32E1-2km168.3
-7515-0.00K1bs111.1
图2 倾斜机构示意图。
全液压自动猫道举升系统运动学分析
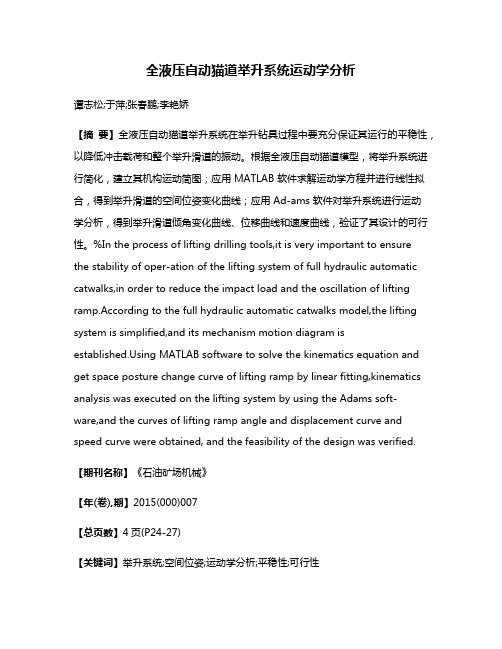
全液压自动猫道举升系统运动学分析谭志松;于萍;张春鹏;李艳娇【摘要】全液压自动猫道举升系统在举升钻具过程中要充分保证其运行的平稳性,以降低冲击载荷和整个举升滑道的振动。
根据全液压自动猫道模型,将举升系统进行简化,建立其机构运动简图;应用 MATLAB 软件求解运动学方程并进行线性拟合,得到举升滑道的空间位姿变化曲线;应用 Ad-ams 软件对举升系统进行运动学分析,得到举升滑道倾角变化曲线、位移曲线和速度曲线,验证了其设计的可行性。
%In the process of lifting drilling tools,it is very important to ensurethe stability of oper-ation of the lifting system of full hydraulic automatic catwalks,in order to reduce the impact load and the oscillation of lifting ramp.According to the full hydraulic automatic catwalks model,the lifting system is simplified,and its mechanism motion diagram ising MATLAB software to solve the kinematics equation and get space posture change curve of lifting ramp by linear fitting,kinematics analysis was executed on the lifting system by using the Adams soft-ware,and the curves of lifting ramp angle and displacement curve and speed curve were obtained, and the feasibility of the design was verified.【期刊名称】《石油矿场机械》【年(卷),期】2015(000)007【总页数】4页(P24-27)【关键词】举升系统;空间位姿;运动学分析;平稳性;可行性【作者】谭志松;于萍;张春鹏;李艳娇【作者单位】吉林大学机械科学与工程学院,长春 130022;吉林大学机械科学与工程学院,长春 130022;吉林大学机械科学与工程学院,长春 130022;吉林大学机械科学与工程学院,长春 130022【正文语种】中文【中图分类】TE924全液压自动猫道分为钻具运移系统、举升系统、提升系统3大部分。
一种石油钻机自动猫道遥控器控制系统
一种石油钻机自动猫道遥控器控制系统石油钻井智能化、自动化、信息化是钻井的发展方向,自动猫道也是钻井自动化的重要组成部分。
当前市场上使用的自动猫道,多数是进口自动猫道,由国内自主研发的猫道仍占很少的一部分,并且多数未经过现场测试使用。
关于自动猫道的遥控器,因为其具有防爆要求,目前国内研发的猫道很多都是采用进口的遥控器,比如CAVOTECHBC 等,国外进口遥控器价格高昂,没有针对性,面板功能太多且操作繁琐。
这些都会影响猫道操作的流畅可靠,操作员不得不花时间熟悉遥控器,无形中增加了猫道的操作失误率。
本项目采用国内公司生产的遥控器,根据猫道的操作要求定制,能满足猫道操作的特殊要求,提供了一种方便可靠,携带方便、不易误操作的猫道遥控器系统,能满足钻台面操作猫道的需求。
目前已经在井队测试使用,提高了钻井效率,达到了理想的效果。
1 无线遥控工作原理无线遥控开关时由发射器、接收器和执行机构组成。
发射器主要包括编码电路和发射电路。
编码电路由操纵器(操纵开关或电位计)控制,操纵者通过操纵器,使编码电路产生需要的控制指令,这些控制指令时具有某些特征的、相互间易于区分的电信号。
但是编码电路产生的指令信号都是频率较低的电信号,无法直接传送到遥控目标上去,还要将指令信号送到发射电路,使它载在高频信号(载波)上,才能由发射天线发送出去。
指令信号载到载波上去的过程叫调制,调制作用由发射电路的调制器完成。
发射电路的主要作用是产生载波,并由调制器将指令信号调制在载波上,经天线降已调载波发送出去。
接收器由接受电路及译码电路组成。
接受电路又包括高频部分和解调器部分。
由接收天线送来的微弱信号经接收高频部分的选择和放大后,送到调制解调器,解调器的作用是从载波上“卸下”指令信号。
由于“卸”下来的各种指令信号时混杂在一起的,需要译码电路分类鉴别,送到相应的执行放大电路。
执行放大电路将指令信号放大到具有一定的功率,用以驱动执行机构。
执行机构将电能转变为机械动作等,从而实现对被控目标的控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
102
研究与探索Research and Exploration ·监测与诊断
中国设备工程 2018.11 (下)
随着钻井装备技术的发展,自动化、变频驱动不仅代表着当前最新高科技,也是未来发展主流方向。
液压自动猫道是诸多钻井自动化装备之一。
不管结构如何,自动猫道的主要功能是自动完成钻杆、钻铤、套管等钻具的上下钻台,其主要优点是效率高、安全可靠、解放人力、控降安全风险并减轻劳动强度,改变传统的通过人工实现钻具上下钻台的方式。
1 某品牌自动猫道在现场试验情况
根据安排,2013年9月5日在某钻井队ZJ40LDB 钻机安装试用了该型号自动猫道。
下面详细介绍该自动猫道的试用情况。
1.1 液压自动猫道基本功能
(1)基本技术参数。
适用钻台高度6~6.5米(ZJ40LDB 钻台高度6米),适用钻具长度8.9~11.5米。
适用钻具直径φ114~273mm,最大运送重量T3,猫道台面高度800mm,猫道台面长度28米,两段结构。
现场管排架布置方式为前后双管排架,钻具输送工作方式上一下三,钻具上猫道方式为自动翻进、翻出。
设备总功率18kW,液压泵驱动,系统额定压力16MPa,系统流量62L/min,整机运输外型尺寸(长×宽×高)16000×2300×2200mm,总重21吨。
(2)主要运行参数。
能适应6~6.5m 钻井平台高度,满足4~10″常用钻具的上下钻台作业。
钻具上平台1根/次,从钻井平台下钻具3根/次,28米全行程单次上下钻具时间控制在90秒内,15米半行程上下钻具控制在60秒内。
上钻具过程采用坡道抬起式专利技术作业方式,减小对钻具接头的磨损,满足8.9~11.5m 不等长钻具上钻台作业时,钻具伸出台面长度的自动计算、控制。
1.2 能完成的主要功能
(1)主体结构及功能。
该产品主要由15米和12米两段水平猫道台和一段坡道段三部分组成,主要实现不同钻杆排之间的钻具倒调、自动上钻具、自动下钻具等作用,适用管具类型:4″、41/2″、5″、51/2″等钻杆、10″以下套管等。
(2)钻具实现上下钻台。
直推式上下钻具作业,保留了传统双气绞车上下钻具的模式。
钻井作业是24小时不间断工作,这对钻井辅助设备的可靠性是个严峻的考验。
当猫道设备出现故障或需要停机维护期间,可以沿用传统双气绞车沿坡道直接上下钻具的作业。
经过现场测量,推一根钻杆立根需要时间56秒,推一根钻杆并抓下一根钻杆双形成需时间为1分56秒。
节约时间方面在推拉钻铤、套管时优势明显,因为上述钻具人力在下面绷钻具、挂绳套等时间长。
(3)实现钻具自动翻转在管架上实现倒换钻具。
通过猫道外之间,可以实现钻具自动翻转到猫道上面或将猫道上面的钻具排列到钻具上面。
(4)钻具运行过程中磨损情况。
对钻具接头的磨损小。
直推式上下钻具最大难点是:小车推动钻具上移过程中,钻具前端移动至坡道根部时阻力最大,对接头的磨损严重。
为减少该摩擦阻力,坡道设计时,在坡道根部增加了一个抬起机构,当钻具接头运动至坡道根部时,程序控制自动把钻具接头抬起,当抬起点高于坡道阻力最大点后,钻具再次上移,从而有效减小了对钻具接头的磨损。
1.3 现场试用实现的功能
从现场试验情况来看,经过现场培训,目前司钻及内外钳工均可以独立操作该设备,该设备主要能完成如下几项工作。
一是自动推钻具上钻台,可以顺着猫道、大门坡道自动运行,达到钻台面800毫米高度,然后人工上提丝。
一种液压自动猫道在钻井作业现场的试验及分析
王小红,陆野,廖志勇
(川庆钻探工程有限公司长庆钻井总公司,陕西 西安 710018)
摘要:近年来,随着科学技术的飞速发展,液压、电控等自动化技术应用在石油钻井作业过程中,特别是应用在钻井作业用的石油钻机上,刹车系统和钻井整个钻井作业中的配套主要钻机设备手动刹车演变成液压盘式刹车以及手动送钻演变成目前的以及自动钻井用的自动送钻等,使整个钻井作业的机械自动化程序有了明显的提升。
液压自动猫道是近年来钻井装备技术发展的新型设备,对提高钻井作业自动化水平、提高作业效率及降低安全风险效果明显。
介绍了一种国产液压自动猫道,通过对在现场试验的效果进行分析并提出改进思路。
关键词:钻井装备;自动猫道;试验;技术改进
中图分类号:TE922 文献标识码:A 文章编号:1671-0711(2018)11(下)-0102-02
103
中国设备
工程
Engineer ing hina C P l ant
中国设备工程 2018.11 (下)二是自动抓住钻具从大门坡道拖拉至猫道任意位置,上述两种动作速度适中安全,人员完全远离钻具运动轨迹区域,没有安全风险,操作人员站在钻台左侧。
三是将管架上面的钻具通过四个液压千斤自动翻转到猫道中间滑槽内,实现钻具自动上下猫道。
四是可以将管架上面钻具左右进行翻转倒换。
从试用情况来看,简单易学,安装拆卸方便,不增加车次,由于场地管架钻具运动区域不需要站人,故安全省力,节约体力;一个人员站在钻台右侧边角操作,另外一人配合提钻具或带、取提丝,需要两人配合。
总体简单实用,安全方便,节约体力,工作效率比人工要高。
但是钻具前期排放检查、涂抹丝扣油、通径等工作仍需要提前做。
2 存在主要问题、分析、改进思路
(1)整体结构不合理。
该猫道为12米+16米两节结构。
第一节猫道长度达到16米,存在超长及拐弯障碍,这给搬家带来麻烦,建议2节猫道改为3节组合,每节长度大约为10米。
(2)钻具运行速度不可调。
钻具上下钻台及钻具在猫道平面上运行的速度不可调。
经过测算,一般单行程(即从猫道尽头到上钻台)推钻具上钻台,大约用时50~58秒;双行程(即推钻具从猫道尽头上钻台再从钻台抓钻具下拉到最大行程)用时1分30秒~1分50秒。
效率比人工高。
但是,现场钻具千差万别,考虑效率及安全因素,滑车运行速度应可调或设置三个档位。
(3)整体推力小。
最大推力为3吨。
一根钻铤重量一般为2吨,再考虑摩擦系数,推拉钻铤很费力。
建议最大推力设计为5~6吨。
(4)猫道槽摩擦力太大,没有设计滚子结构。
建议设计滚子结构,一是减少摩擦力,二是避免摩擦损
伤钻具。
(5)滑车抓钻具机构设计不合理。
滑车抓钻具机构应能满足不同直径或没有接箍钻具的要求,需配不同规格的抓钻具机构,该机构方便拆卸安装。
(6)其他。
比如颜色应符合钻井设备标示要求;液压管线设计应便于插接等。
3 结语
根据钻机的钻具输送方式繁琐,工作人员劳动强度大、操作危险系数大的缺点等,提出一种自动化程度高、现场操作安全可靠性强、制造成本低、系统整体结构劲抽合理,提高了钻井工作效率,不影响原有钻机结构和整个钻井作业过程实现自动化动力液压猫道,提出不同于传统的钻具输送方式,利用钻台下方的井口空间,钻井队钻具从钻台面下方垂直输送,大大提升了钻台使用空间,使用更加安全,自动化程序高,并提出本研究课题的主要研究和实现内容,以及该猫道不同于以往所使用的自动化猫道的主要研究和实现内容,以及该猫道不同于以往所使用的自动化猫道的创新点。
液压自动猫道在国内外得到一定程度的应用,技术相对成熟,现场使用效果好。
国外产品最大缺点是价格昂贵,因此国内开发的新型液压自动猫道在现场使用效果较好,通过现场验证,提出了改进完善思路,产品完善后值得推广使用。
参考文献:
[1]刘平全,崔学政,董磊.钻井平台钻杆排放方式对比及其自动化操作系统[J].中国海洋平台,2010,25(1):51-56.
[2]
刘文庆,崔学政,张富强.钻杆自动排放系统的发展及典型结构[J].石油矿场机械,2007,36(11):74-77.。