采用系统辨识工具箱辨识结果
基于MATLAB系统辨识工具的系统辨识
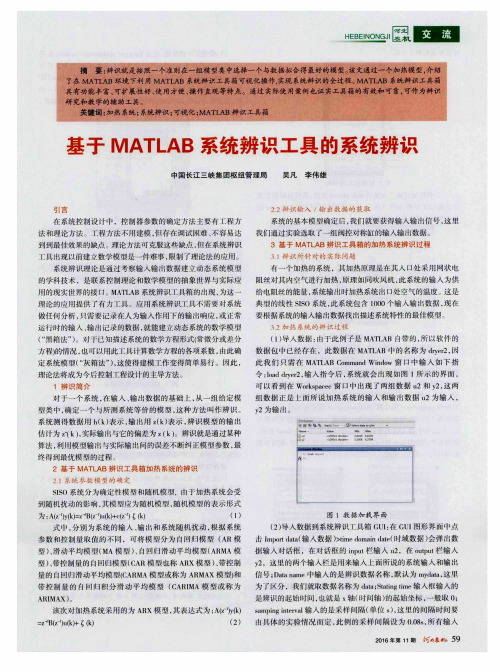
图 1数 据 加 载 界 面
式中, 分 别为系统 的输 入 、 输 出 和系统 随机扰 动 , 根 据系统 参数 和控 制量取值 的不同 ,可将模 型分 为 自回归模 型 ( A R模 型) 、 滑动平均模 型 ( M A模 型 ) 、 自回归滑动平 均模型 ( A R M A模 型) 、 带控制量 的 自回归模型 ( C A R模型也称 A R X模型 ) 、 带控制 量的 自回归滑动平均模型( C A R MA模型或称为 A R MA X模 型) 和 带控 制量 的 自同 归积分 滑动 平均 模 型 ( C A R I MA模 型 或称 为
典 型的线性 S I S ( ) 系统 , 此 系统 包含 1 0 0 0个输入输 m数 据 , 现在 要 根据 系统 的输 入输出数据找出描述 系统特性的最件模型。
j 毛 曩:
做任何分析 . 只需要记 录在人 为输 入作 用下的输 } H 响应 , 或正常 运 行时的输 入 、 输 记录的数据 , 就能建立动态 系统 的数学模 型 ( “ 黑箱法 ” ) 。埘于 已知描述 系统 的数学方程形式( 常微分或差分 方程) 的情况 , 也可以用此 具计算数学方程 的各项系数 , d 此确
ARI MAX ) 。
( 2 ) 导 人数 据 到 系统 辨识 1 二 具箱 G U I : 在 GU I 罔形 界 面 中点
终 得 到 最 优模 型 的过 程 .
2 墓 子 MAi L AB 识 工 主 加 热 系 统
!毫; l 、 l l - 一 : ∞ 一 : -
组 数据正 是上 面所说 加热 系统 的输 入和输 出数据 u 2为输 入 ,
气分装置过程模型辨识及评价标准研究

i n t he g a s s e pa r a t i o n u ni t
d e v e l o p me n t a n d a p p l i c a t i o n o f g a s s e p a r a t i o n u n i t p r o j e c t p r o c e s s ,u s e s t e p r e s p o n s e m e t h o d a n d t h e
及各 种辨识模 型结构 。针 对 气体 分 离装置 节 能降耗 技 术开发 与应 用项 目中复 杂的 工业流 程 , 采 用 阶 跃 响应法 , 利 用 Ma t l a b系统辨识 工具箱 中主要 功 能函数 , 对过 程模 型进 行 辨识 , 并分析 不 同模 型的辨 识 结果。结合损 失 函数 、 预 测最终误 差、 赤池信 息等准则 , 对不 同结构 类型的辨识模 型进 行评价 。 关键 词 : 参数 辨识 ; 气体分 离装 置 ; 系统 辨识 工具 箱 ; 损 失函数 ; 评价 准 则 中图分 类号 : T P 2 7 4 文 献标 志码 : A 文 章编 号 : 1 0 0 0— 0 6 8 2 ( 2 0 1 3 ) 0 1 — 0 0 1 5一 o 4
t i o n a l P e t r o l e u m J i n z h o u c o mp a n y .F o r c o mp l e x i n d u s t r i a l p r o c e s s c o n t r o l ,wi t h e n e r g y s a v i n g t e c h n o l o g y
利用Matlab进行系统辨识的技术方法

利用Matlab进行系统辨识的技术方法一、引言系统辨识是研究系统动态特性的一个重要方法,它广泛应用于控制系统、信号处理、通信等领域。
利用Matlab进行系统辨识能够实现快速、准确的模型建立和参数估计。
本文将介绍在Matlab环境下常用的系统辨识技术方法及其应用。
二、系统辨识的基本概念系统辨识是通过对系统的输入和输出信号进行观测和分析,以推断系统的结构和参数。
一般来说,系统辨识包括建立数学模型、估计系统参数和进行模型验证三个步骤。
1. 建立数学模型建立数学模型是系统辨识的第一步,它是描述系统行为的数学表达式。
常用的数学模型包括线性模型、非线性模型和时变模型等。
2. 估计系统参数在建立了数学模型之后,需要通过对实验数据的分析,估计出系统的参数。
参数估计可以通过最小二乘法、极大似然估计法等方法实现。
3. 模型验证模型验证是为了确定估计得到的系统模型是否准确。
常用的方法有经验验证、残差分析、模型检验等。
三、常用的系统辨识技术方法1. 线性参数模型线性参数模型是最常用的系统辨识方法之一。
它假设系统具有线性特性,并通过估计线性模型的参数来描述系统。
在Matlab中,可以使用函数"arx"进行线性参数模型的辨识。
2. 神经网络模型神经网络模型是一种非线性模型,它通过人工神经元的连接权值来描述系统行为。
在Matlab中,可以使用"nlarx"函数进行神经网络模型的辨识。
3. 系统辨识工具箱Matlab提供了丰富的系统辨识工具箱,包括System Identification Toolbox和Neural Network Toolbox等。
这些工具箱提供了各种方法和函数,方便用户进行系统辨识分析。
四、利用Matlab进行系统辨识的应用案例1. 系统辨识在控制系统中的应用系统辨识在控制系统中具有广泛的应用,如无人机控制、机器人控制等。
通过对系统进行辨识,可以建立准确的数学模型,并用于控制器设计和系统优化。
Matlab系统辨识尝试之详细过程1

Matlab系统辨识尝试之详细过程1前面介绍了Matlab系统辨识工具箱的一些用法,这里拿一个直观的例子来尝试工具箱的具体用法。
比较长,给个简单目录吧:1.辨识的准备2.辨识数据结构的构造3.GUI辨识4.辨识效果5.对固有频率的辨识6.结构化辨识7.灰箱辨识8.加入kalman滤波的灰箱辨识1.辨识的准备在辨识前,首先要根据自己辨识的情况,确定要辨识的状态空间模型的一些特点,如连续还是离散的;有无直通分量(即从输入直通到输出的分量);输入延迟;初始状态等。
了解了这些情况就可以更快速的配置辨识时的一些设置选项。
2.辨识数据结构的构造使用原始数据构造iddata结构:data=iddata(y,u,Ts);这里以一个弹簧质量系统的仿真为例代码如下,其中用到了函数MDOFSolve,这在之前的博文介绍过(/?p=183),拿来用即可。
如果发现运行有错误,可以将MDOFSolve函数开头的一句omega2=real(eval(omega2));注释掉。
%弹簧质量系统建模clcclearclose allm=200;k=980*1000;c=1.5*1000;m1=1*m;m2=1.5*m;k1=1*k;k2=2*k;k3=k1;%%由振动力学知识求固有频率M=[m10;0m2];K=[k1+k2-k2;-k2k3+k2];[omega,phi,phin]=MDOFSolve(M,K);fprintf('固有频率:%fHz\n',subs(omega/2/pi));%%转化到状态空间innum=2;outnum=2;statenum=4;A=[0100;-(k1+k2)/m10k2/m10;0001;k2/m20-(k3+k2)/m20];B=[00;1/m10;00;01/m2];C=[1000;0010];D=zeros(outnum,innum);K=zeros(statenum,innum);mcon=idss(A,B,C,D,K,'Ts',0);%连续时间模型figureimpulse(mcon)%%信号仿真,构造数据供辨识n=511;%输入信号长度Ts=0.001;t=0:Ts:(n-1)*Ts;u1=idinput(n,'prbs');%输入1为伪随机信号u2=zeros(n,1);%输入2为空u=[u1u2];simdat=iddata([],u,Ts);%形成输入数据对象e=randn(n,2)*1e-7;simopt=simOptions('AddNoise',true,'NoiseData',e);%添加噪声yn=sim(mcon,simdat,simopt);%加噪声仿真y=sim(mcon,simdat);%无噪声仿真figurefor i=1:outnumsubplot(outnum,1,i)plot(t,y.OutputData(:,i))hold onplot(t,yn.OutputData(:,i),'r')axis tighttitle(sprintf('输出%d',i))legend({'无噪声仿真','含噪声仿真'})end%保存输入输出数据,供后续辨识data=iddata(y.OutputData,simdat.InputData,Ts);datan=iddata(yn.OutputData,simdat.InputData,Ts);运行后,变量data中保存了无噪声的系统仿真输入输出数据,datan中为含噪声的仿真数据。
matlab system identification toolbox使用

matlab system identification toolbox使用1. 引言1.1 概述本文旨在介绍如何使用Matlab系统辨识工具箱(Matlab System Identification T oolbox)进行系统辨识。
系统辨识是一种通过收集并分析数据来推断未知系统的数学模型的过程。
这个工具箱为用户提供了许多功能和方法,可以帮助他们有效地进行系统辨识任务。
1.2 文章结构本文将按照以下结构展开内容:首先,在第二部分中,我们将简要介绍Matlab 系统辨识工具箱的概念和作用。
然后,在第三部分中,我们将概述常用的系统辨识方法,包括参数辨识方法、非参数辨识方法以及模型结构选择方法。
接下来,在第四部分中,我们将详细阐述使用Matlab系统辨识工具箱的步骤,包括数据准备与预处理、模型建立与训练以及评估模型性能与调整参数。
最后,在第五部分中,我们将通过实例分析与讨论的方式来加深对这些步骤的理解,并让读者更好地掌握使用该工具箱进行实际应用的技巧和思路。
1.3 目的本文的目标是向读者全面介绍Matlab系统辨识工具箱的使用方法,帮助读者了解该工具箱的潜力和功能。
通过这篇长文,读者将能够了解系统辨识的基本概念、常用的方法以及如何利用Matlab系统辨识工具箱进行实际操作。
我们希望读者能够通过学习本文提供的知识,进一步提升在系统辨识领域的能力,并成功应用于各种实际问题中。
2. Matlab系统辨识工具箱简介2.1 工具箱概述Matlab系统辨识工具箱是Matlab软件中的一部分,用于进行系统辨识与模型建立的分析。
它提供了一系列功能强大的工具和算法,用于从实验数据中估计或推断出系统的数学模型。
通过使用系统辨识工具箱,用户可以在Matlab环境下快速、方便地进行参数辨识、非参数辨识以及模型验证等任务。
这些功能使得用户能够更好地理解和分析已有的数据,并为进一步建立、优化或控制系统提供有力支持。
2.2 工具箱功能Matlab系统辨识工具箱提供了丰富多样的功能,包括以下几个方面:- 参数辨识:通过估计线性或非线性模型的参数值来描述实际系统。
基于Matlab系统辨识的参数辨识与仿真
基于Matlab系统辨识的参数辨识与仿真【摘要】论述了系统辨识的基本理论,分别用最小二乘法参数辨识和辅助变量法参数辨识。
根据Matlab系统辨识工具箱中的一些基本函数,结合实例来熟悉基于系统辨识工具箱的建模方法。
【关键词】Matlab;参数辨识;最小二乘法;辅助变量法1.系统辨识的基本理论系统辨识是根据系统的输入输出的时间函数来确定描述系统行为的数学模型,是现代控制理论中的一个分支。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
它包括确定系统数学模型结构和估计其参数的方法。
系统辨识的流程如图1所示。
图1 系统辨识过程流程图2.模型参数辨识的方法系统辨识包括模型阶次辨识和参数辨识。
经典参数辨识的方法主要有他包括脉冲响应法、阶跃响应法、频率响应法、最小二乘法、相关分析法、谱分析法和极大似然法等,其中最小二乘法是最基本和最经典的,也是其他方法基本的思想的来源。
比如辅助变量法。
2.1 最小二乘法辨识考虑如下CAR模型:(1)参数估计的任务是根据可测量的输入和输出,确定如下个参数:对象(1)可以写成如下最小二乘形式:(2)现有L组输入输出观测数据:利用最小二乘法得到系统参数的估计值为:(3)2.2 辅助变量法辨识当为有色噪声时,利用最小二乘法进行参数辨识时往往得不到无偏一致的参数估计量。
在这个时候可以引入变量,然后利用最小二乘法进行辨识就可得到无偏一致的参数估计量。
因此,对于线性或本质线性系统,其过程的模型都可以化成最小二乘形式,考虑如下所示的模型方程:(4)将上式写成最小二乘格式,则得:假定存在一个辅助变量矩阵,维数与H相同,它满足以下极限特性:式中Q是非奇异矩阵。
如果辅助变量满足上述条件,则有:(5)图2 系统仿真图3.建模实例3.1 非参数模型辨识某被控对象的数学模型可以表示为:,式中:;为白噪声,编制MATLAB程序,分别对上述对象进行ARX建模和辅助变量法建模,并比较两种方法得到的脉冲响应。
Matlab中的系统辨识和参数标识技巧

Matlab中的系统辨识和参数标识技巧引言:在工程和科学领域中,系统辨识是一项重要的任务。
通过对系统进行辨识和参数标定,我们可以建立数学模型来描述系统的行为。
在Matlab中,有许多工具和技巧可以用来进行系统辨识和参数标定。
本文将介绍一些常用的工具和技巧,以帮助读者更好地理解和应用这些方法。
一、准备工作在进行系统辨识和参数标定之前,我们首先需要准备一些基本的工作。
首先,我们需要收集系统的输入和输出数据。
输入数据通常是对系统施加的激励信号,例如阶跃信号或随机信号。
输出数据是系统对输入信号的响应。
收集足够量的数据对于准确辨识系统非常重要。
其次,我们需要确保数据的质量。
在收集数据时,我们需要注意采样频率和信噪比。
采样频率要足够高,以捕捉系统的快速动态响应;信噪比要足够高,以避免噪声对数据的影响。
如果数据质量不高,将会使得系统辨识和参数标定的结果不准确。
二、线性系统辨识线性系统辨识是系统辨识领域中的一项基本任务。
在Matlab中,可以使用System Identification Toolbox来进行线性系统辨识。
首先,我们可以使用中自相关函数(cross-correlation)来计算输入和输出数据之间的相关性。
这可以通过Matlab中的xcorr函数实现。
相关性分析可以帮助我们了解系统的输入和输出之间的关系,为后续的系统辨识提供参考。
接下来,我们可以使用频域分析方法来对系统进行辨识。
其中一个常用的方法是基于频率响应函数的辨识方法,例如最小二乘法(Least Squares)等。
这些方法可以通过Matlab中的tfest函数来实现。
另外,我们还可以使用时域辨识方法,例如最小均方误差法(Least Mean Squares)等。
时域辨识方法通常通过求解线性方程组来确定系统的参数。
在Matlab中,我们可以使用lsim和inv函数来实现这些方法。
三、非线性系统辨识与线性系统不同,非线性系统的辨识更加复杂。
使用MATLAB进行非线性系统辨识与自适应控制的基本原理

使用MATLAB进行非线性系统辨识与自适应控制的基本原理随着现代科技的不断发展,非线性系统的研究和应用变得越来越重要。
非线性系统具有复杂的动力学行为,无法直接用常规的线性方法进行分析和控制。
因此,非线性系统辨识和自适应控制成为解决这个问题的关键手段。
本文将介绍使用MATLAB进行非线性系统辨识和自适应控制的基本原理。
第一部分:非线性系统辨识非线性系统辨识的目标是通过实验数据找到最佳的数学模型来描述非线性系统的行为。
在MATLAB中,我们可以利用系统辨识工具箱(System Identification Toolbox)实现这个目标。
首先,我们需要收集实验数据。
数据的选择应该尽可能覆盖非线性系统的各种工作条件和动态特性。
然后,我们可以使用MATLAB中的系统辨识工具箱来对实验数据进行处理和分析。
在系统辨识工具箱中,有多种方法可以用于建立非线性系统模型,如非线性ARX模型、基于支持向量机的系统辨识等。
这些方法都有各自的特点和适用范围。
根据实际情况选择合适的方法,并进行参数的估计和模型的验证。
在参数估计过程中,MATLAB会自动进行数学优化算法,以找到最佳的参数估计结果。
模型验证可以通过与实验数据的比较来评估模型的拟合程度和预测精度。
如果模型与实验数据有较好的拟合效果,我们可以认为该模型比较准确地描述了非线性系统的行为。
第二部分:自适应控制在得到非线性系统的数学模型后,我们可以使用自适应控制方法对非线性系统进行控制。
自适应控制的思想是根据系统的动态行为,通过在线更新控制器参数来实现系统的自适应调整。
在MATLAB中,可以使用自适应控制工具箱(Adaptive Control Toolbox)来实现自适应控制。
该工具箱提供了各种自适应控制算法,如基于模型参考自适应控制、基于直接自适应控制等。
在自适应控制中,我们需要根据非线性系统的数学模型来设计自适应控制器。
根据系统的特性和性能要求,可以选择不同的自适应控制算法和参数更新策略。
MATLAB系统辨识工具箱学习详细教程

MATLAB系统辨识工具箱学习详细教程MATLAB系统辨识工具箱是MATLAB软件中的一个工具箱,用于进行系统辨识和模型建模的分析。
该工具箱提供了多种辨识算法和工具,可以对线性和非线性系统进行辨识,并生成对应的数学模型。
下面将为您详细介绍MATLAB系统辨识工具箱的学习过程。
首先,在使用MATLAB系统辨识工具箱前,需要安装MATLAB软件并具备一定的MATLAB编程基础。
如果您还没有安装MATLAB或者对MATLAB不够熟悉,建议您先进行相关的学习和了解。
1.学习基本概念:在开始学习MATLAB系统辨识工具箱之前,需要了解一些基本概念,例如系统辨识、模型建模、参数估计等。
可以通过阅读相关的系统辨识的教材或者进行在线,对相关概念有一个基本的了解。
2.熟悉MATLAB系统辨识工具箱界面:3.数据导入:在进行系统辨识之前,首先需要准备好系统辨识所需的数据。
数据可以是实验数据或者仿真数据,可以是时域数据或者频域数据。
在系统辨识工具箱界面的“数据导入”区域,可以将数据导入到MATLAB中进行后续的辨识分析。
4.选择模型类型:在进行系统辨识之前,需要选择适合的数学模型类型。
MATLAB系统辨识工具箱提供了多种常见的模型类型,包括ARX模型、ARMAX模型、OE模型、TFE模型等。
选择合适的模型类型对辨识结果的精度和准确性有重要的影响。
5.选择辨识算法:在选择模型类型后,需要选择合适的辨识算法进行参数估计和模型建模。
MATLAB系统辨识工具箱提供了多种常用的辨识算法,例如最小二乘法、极大似然法、递推最小二乘法等。
选择合适的辨识算法也对辨识结果的精度和准确性有重要的影响。
6.进行系统辨识:在选择了合适的模型类型和辨识算法后,可以在系统辨识工具箱界面中点击“辨识”按钮,开始进行系统辨识分析。
系统辨识工具箱会根据所选的模型类型和辨识算法,对输入的数据进行参数估计和模型建模,并生成相应的辨识结果。
7.结果分析和评估:在系统辨识完成后,可以在系统辨识工具箱界面中查看辨识结果和模型质量评估。
matlab系统辨识工具箱

案例二:非线性系统的辨识与控制
要点一
总结词
要点二
详细描述
非线性系统辨识与控制是Matlab系统辨识工具箱的重要应 用之一,通过该案例可以了解非线性系统的辨识方法和技 术。
该案例首先介绍了非线性系统的基本概念和数学模型,然 后使用Matlab系统辨识工具箱对一个非线性系统进行参数 估计和模型验证。接着,利用得到的模型进行控制系统设 计和仿真,验证控制效果。最后,对非线性系统的辨识和 控制效果进行评估和优化。
系统辨识的步骤与流程
总结词
系统辨识通常包括数据采集、模型建立、参 数估计和模型验证等步骤。
详细描述
在数据采集阶段,需要选择合适的输入信号 ,并记录系统的输入和输出数据。模型建立 阶段则根据输入和输出数据选择合适的模型 形式。参数估计阶段利用选定的模型和采集 的数据来估计模型参数。最后,在模型验证 阶段,通过比较模型的输出与实际系统的输
分析系统的性能指标,如稳定性、 动态响应等,以确定系统是否满 足设计要求。
控制策略设计
根据系统性能分析结果,设计合 适的控制策略,如PID控制、模糊 控制等。
系统优化
通过调整系统参数和控制策略, 优化系统性能,提高系统的稳定 性和动态响应能力。
04
工具箱中的常用函数与模 块
创建模型函数
总结词
用于建立系统辨识模型
05
案例分析
案例一:简单线性系统的辨识与控制
总结词
简单线性系统辨识与控制是使用Matlab系统辨识工具 箱的基础案例,通过该案例可以了解系统辨识的基本 原理和方法。
详细描述
该案例首先介绍了线性系统的基本概念和数学模型, 然后通过Matlab系统辨识工具箱对一个简单的线性系 统进行参数估计和模型验证。最后,利用得到的模型 进行控制系统设计和仿真,验证控制效果。
系统辨识的Matlab实现方法(手把手)
最近在做一个项目的方案设计,应各位老总的要求,只有系统框图和器件选型可不行,为了凸显方案设计的高大上,必须上理论分析,炫一下“技术富”,至于具体有多大实际指导意义,那就不得而知了!本人也是网上一顿百度,再加几日探索,现在对用matlab实现系统辨识有了一些初步的浅薄的经验,在此略做一小节。
必须要指出的是,本文研究对象是经典控制论理最简单最常用的线性时不变的siso系统,而且是2阶的哦,也就是具有如下形式的传递函数:本文要做的就是,对于有这样传递函数的一个系统,要辨识得到其中的未知数T,ξ!!这可是控制系统设计分析的基础哦,没有系统模型,啥理论、算法都是白扯,在实际工程中非常重要哦!经过总结研究,在得到系统阶跃响应实验数据之后(当然如果是其他响应,也有办法可以辨识,在此还是只讨论最简单的阶跃响应实验曲线,谁让你我是菜鸟呢),利用matlab至少可以有两种方法实现实现(目前我只会两种,呵呵)!一、函数法二、GUI系统辨识工具箱下面分别作详细介绍!一、 函数法看官别着急,先来做一段分析(请看下面两排红*之间部分),这段分析是网上找来的,看看活跃一下脑细胞吧,如果不研读一下,对于下面matlab 程序,恐怕真的就是一头雾水咯!*******************************************************************************G(s)其中,则有:传递函数进一步化为:当输入为单位阶跃函数时,对上式进行拉普拉斯反变换,得系统时域下的单位阶跃响应为:即该式的形式满足直线方程其中,通过最小二乘算法实现直线的拟合,***************************************************Matlab程序代码:clcclose allt=[1 3 5 7 9 11 13 15 17 19];y=[0.149086 0.5890067 0.830617 0.933990 0.973980 0.991095 0.995868 0.998680 0.999490 0.999850];y2=log(1-y);plot(t,y2,'*');grid onpm=polyfit(t,y2,1)value=polyval(pm,t);hold onplot(t,value,'r')title('\fontname{黑体}\fontsize{20}y(t)=at+b')w2=-pm(1)w1=w2/(1-exp(-pm(2)))T=1/sqrt(w1*w2)theta=(w1+w2)/(2*sqrt(w1*w2))z=[];p=[-w1 -w2];k=w1*w2;sys=zpk(z,p,k)figure(2)step(sys,[0:0.5:20]);axis([0 20 0 1.2])hold onplot(t,y,'r*')打开matlab,新建一个Function,把上述程序段拷进去,保存,运行~~~~~~~~~,运行结果:系统的传递函数为)4797.0)(126.1(54034.0)(++=S S S G很顺利吧?先高兴一个!问题接着马上就来了,上面这个例子,这个传递函数的极点刚好都是负实数,因此辨识得很顺利,但是如果系统是欠阻尼系统,也就是如果传递函数的根是复数,那么上述函数段,就无能为力咯,会出现说“matlab 无法处理增益为复数情况之类······” 例如)1)(1(2)(j S j S S G -+++=对于这个系统,若果用simulink 做一下阶跃响应,再把实验数据代入上述函数段,那就不行咯!怎么办呢,只能另辟蹊径了!二、(System Identification Tool)系统辨识工具箱早听说matlab博大精深,神通广大了,于是乎我确定肯定有更简单、直观、强大的工具来完成这小儿科把戏。
使用MATLAB进行系统辨识与参数估计的基本原理
使用MATLAB进行系统辨识与参数估计的基本原理近年来,随着人工智能和机器学习的发展,系统辨识和参数估计变得越来越重要。
在工程和科学领域,系统辨识与参数估计可以帮助我们理解和预测复杂系统的行为,从而为决策和控制提供有力支持。
而MATLAB作为一种强大的科学计算软件,在系统辨识与参数估计方面提供了丰富的工具和功能。
本文将介绍MATLAB 中进行系统辨识与参数估计的基本原理。
一、系统辨识的概念系统辨识是指通过一系列的实验和数据分析,确定出系统的数学模型或特性。
在实际工程和科学问题中,我们经常遇到许多系统,如电子电路、生化反应、飞行控制系统等。
通过系统辨识,我们可以了解系统的行为规律,预测未来状态,从而进行优化和控制。
在MATLAB中,可以使用系统辨识工具箱(System Identification Toolbox)进行系统辨识。
该工具箱提供了一系列的函数和算法,可以帮助我们建立和分析系统模型。
例如,使用arx函数可以基于自回归模型建立离散时间系统的模型,使用tfest函数可以进行连续时间系统的模型辨识。
二、参数估计的基本原理参数估计是系统辨识的一个重要部分,它是指通过已知的输入输出数据,估计系统模型中的参数。
在实际应用中,我们通常只能通过实验数据来获得系统的输入输出信息,而无法直接观测到系统内部的参数。
因此,参数估计成为了一种重要的技术,用于从数据中推断出系统的模型参数。
在MATLAB中,参数估计的基本原理是最小二乘估计。
最小二乘估计是指寻找能够最小化实际输出与模型输出之间的误差平方和的参数值。
在MATLAB中,可以使用lsqcurvefit函数进行最小二乘估计,该函数可以用来拟合非线性模型或者线性模型。
此外,还可以使用最大似然估计(MLE,Maximum Likelihood Estimation)进行参数估计,MATLAB通过提供相应的函数,如mle函数和mlecov 函数,支持最大似然估计的使用。
基于Matlab系统辨识工具箱的参数辨识

第 20 卷第 4 期 2008 年 8 月
^
L →∞
式中 : z ( k ) 为系统输出量的第 k 次观测值 ; z ( k - 1 ) 为系统输出量的第 ( k - 1 ) 次观测值 , 依次类推 ; u ( k ) 为系统的第 k 次输入值 ; u ( k - 1 ) 为系统的第 ( k
- 1 ) 次输入值 , 依次类推 ; e ( k ) 是均值为零的随机
211 最小二乘法辨识
[3 - 4]
H L = [ h ( 1 ) , h ( 2 ) , …, h (L ) ]
将式 ( 6 ) 代入式 ( 3 ) 可得
zL = H Lθ + eL , ( 7)
。
对于 SISO 离散随机系统 ,其描述方程为
z ( k ) + a1 z ( k - 1 ) + … + an a z ( k - na ) = b1 u ( k - 1 ) + b2 u ( k - 2 ) + … + bn b u ( k - nb ) + e ( k ) , ( 1)
取准则函数
∞ ∞
θ) = J(
k =1
∑
[ e ( k) ]
2
=
k =1
∑[ z ( k )
- h ( k )θ] , ( 5 )
^
T
2
使 J (θ) 为最小值时 θ估计值记作 θ L S , 称作参数 θ 的最小二乘估计值 。 式 ( 5 ) 表明 , 未知模型参数 θ最可能的值是在 实际观测值与计算值之累次误差的平方和达到最小 值处 , 所得到的这种模型输出能最接近实际系统的 输出 。
Matlab中的系统辨识和系统建模技术
Matlab中的系统辨识和系统建模技术随着科技的发展和网络的普及,计算机科学在世界各个领域扮演着越来越重要的角色。
在工程领域,特别是在控制系统设计和信号处理方面,Matlab是一种非常强大而灵活的工具。
Matlab提供了一系列用于系统辨识和系统建模的技术,可以帮助工程师更好地分析和设计控制系统。
本文将探讨Matlab中系统辨识和系统建模的一些关键技术和应用。
系统辨识是从已知输入和输出数据中推断出系统动态特性和参数的过程。
在实际应用中,我们经常需要对系统进行建模和分析,以便设计适当的控制器或进行仿真。
Matlab中提供的系统辨识工具箱(System Identification Toolbox)可以实现这个目标。
系统辨识工具箱提供了一系列用于建立数学模型和预测系统行为的函数。
用户只需要提供输入和输出数据,系统辨识工具箱就可以根据不同的算法和模型,自动推断出最佳的系统模型。
这些模型可以是连续或离散时间的,并且可以使用不同的参数化形式,如ARX模型、ARMAX模型、Box-Jenkins模型等。
在进行系统辨识之前,我们需要确保输入和输出数据是准确和可靠的。
Matlab中的数据导入和预处理功能可以帮助我们完成这个任务。
数据导入功能可以处理各种格式的数据文件,如文本文件、Excel文件等。
通过简单的命令,我们可以加载并预览数据,确保数据的正确性。
此外,Matlab还提供了数据滤波和预处理的功能,如去除噪声、平滑曲线、截取有效数据等。
这些功能有助于减小误差,提高系统辨识的精度和可靠性。
一旦数据准备就绪,我们就可以使用系统辨识工具箱中的函数来建立系统模型。
在选择模型结构时,我们需要考虑系统的物理特性和数学适应性。
Matlab提供了多种模型结构选择方法,如最小二乘法、极大似然法、信息准则法等。
这些方法可以自动评估不同模型结构的拟合效果,并给出最佳模型的准则。
此外,Matlab还提供了模型验证和验证的工具,可以通过比较模型预测和实测数据,评估模型的准确性和适应性。
Matlab中的系统辨识与模型预测控制技术

Matlab中的系统辨识与模型预测控制技术引言Matlab是一种广泛应用于工程和科学领域的高级计算环境和编程语言。
它提供了丰富的工具箱和函数,使工程师和科学家能够进行数据分析、模拟和建模。
本文将探讨Matlab中的系统辨识与模型预测控制(Model Predictive Control, MPC)技术,并介绍其基本原理、应用和优势。
一、系统辨识的基本原理系统辨识是指通过对系统输入和输出数据的分析和处理,来获得对系统动态行为的理解和描述的过程。
在Matlab中,系统辨识工具箱提供了一系列方法和算法来实现系统辨识,其中最常用的方法是基于数据的系统辨识方法。
这些方法根据系统输入和输出的数据样本,通过参数估计和模型拟合来获取系统模型。
在系统辨识中,常用的模型包括线性模型、非线性模型和时变模型等。
线性模型是最简单和最常用的模型类型,它假设系统的行为是线性的,具有参数可调整的特点。
非线性模型考虑了系统的非线性特性,能更准确地描述系统的行为,但参数估计和模型拟合的复杂性也相应增加。
时变模型是指系统参数会随时间变化的模型,能更好地描述实际系统动态行为的变化。
在Matlab中,可以使用系统辨识工具箱中的命令和函数来进行参数估计和模型拟合。
通过对实际系统的输入和输出数据进行采样和记录,然后使用这些数据来拟合和评估系统模型,可以有效地了解和预测系统的行为。
这些模型可以用于系统控制的设计和优化,为工程师和科学家提供决策支持和指导。
二、模型预测控制的基本原理模型预测控制是一种先进的控制技术,它通过预测系统的未来行为来生成控制策略,并根据实际系统的反馈信息进行修正和优化。
在Matlab中,模型预测控制工具箱提供了一系列函数和工具,使工程师和科学家能够轻松地设计和实现模型预测控制算法。
模型预测控制的基本原理是通过建立一个系统模型来预测系统未来的行为,并根据这些预测结果生成相应的控制策略。
通常,系统模型可以使用系统辨识技术获得,也可以采用已知的数学模型。
Matlab的系统辨识和参数估计方法

Matlab的系统辨识和参数估计方法一、引言Matlab是一种强大的计算机软件,被广泛应用于各个领域的科学研究和工程实践。
在信号处理、控制系统设计等领域,系统的辨识和参数估计是一项重要的任务。
本文将介绍Matlab中常用的系统辨识和参数估计方法,包括参数辨识、频域辨识、时域辨识等方面。
同时,还将探讨这些方法的优势和局限性。
二、参数辨识参数辨识是一种推断系统输入和输出之间关系的方法。
Matlab提供了多种参数辨识工具箱,例如System Identification Toolbox。
其中,最常用的方法包括最小二乘法、极大似然法、递归最小二乘法等。
最小二乘法是一种经典的参数估计方法,通过最小化测量值与预测值之间的差异来估计参数。
Matlab中的lsqcurvefit函数可以用于最小二乘拟合曲线。
例如,通过拟合一组数据点得到一个最优的曲线,可以估计曲线的参数。
极大似然法是一种基于概率统计的参数估计方法,通过最大化观测数据出现的似然函数来估计参数。
Matlab中的mle函数可以用于极大似然估计。
例如,在某个信号的概率密度函数已知的情况下,可以通过观测到的样本来估计概率密度函数的参数。
递归最小二乘法是一种递归更新参数的方法,可以在随时间变化的系统中实时地进行参数估计。
Matlab中的rls函数可以用于递归最小二乘估计。
例如,在自适应滤波中,可以通过递归最小二乘法来实时估计信号的参数。
三、频域辨识频域辨识是一种基于频谱分析的参数估计方法,可以在频率域中确定系统的特性。
Matlab提供了多种频域辨识工具箱,例如System Identification Toolbox和Signal Processing Toolbox。
其中,最常用的方法包括功率谱密度估计、自相关函数法、协方差法等。
功率谱密度估计是一种常用的频域参数估计方法,可以估计信号在不同频率上的能量分布。
Matlab中的pwelch函数可以用于功率谱密度估计。
系统辨识辨识方法性能分析

系统辨识辨识方法性能分析引言系统辨识是指通过观测系统的输入和输出,利用数学模型对系统的动态行为进行建模和预测的过程。
辨识方法的性能分析是评估辨识方法的优劣和适用范围的过程,对于选择合适的辨识方法和优化辨识结果具有重要意义。
本文将对系统辨识中常用的几种方法进行性能分析,包括参数辨识方法、非参数辨识方法和半参数辨识方法。
参数辨识方法参数辨识方法是指通过估计系统的参数来建立系统模型。
常见的参数辨识方法包括最小二乘法、极大似然法和支持向量回归等。
这些方法通过寻找最优参数来拟合系统的输入和输出数据,从而得到系统的数学模型。
对于参数辨识方法的性能分析,可以从以下几个方面进行评估:1.拟合优度:拟合优度是指辨识方法得到的模型与实际系统之间的拟合程度。
可以通过计算模型的残差平方和或R方值来评估拟合优度,拟合优度越高,模型与实际系统的拟合程度越好。
2.参数估计误差:参数估计误差反映了辨识方法对系统参数的估计准确程度。
可以通过计算参数估计误差的均方根误差或标准偏差来评估辨识方法的参数估计精度,参数估计误差越小,辨识方法的性能越好。
3.参数可辨识性:参数可辨识性指的是辨识方法是否能够准确地估计系统的参数。
对于具有多个参数的系统,如果某些参数之间存在相关性或冗余性,辨识方法可能无法准确地估计这些参数。
因此,参数可辨识性是评估辨识方法是否适用于系统辨识的重要指标。
非参数辨识方法非参数辨识方法是指通过不对系统模型做任何假设,直接从输入和输出数据中提取系统的特征来进行辨识。
常见的非参数辨识方法包括频域方法、时域方法和小波分析等。
这些方法不需要对系统进行具体的数学建模,对系统的特征进行直接提取和分析。
对于非参数辨识方法的性能分析,可以从以下几个方面进行评估:1.频谱分辨能力:频谱分辨能力是指辨识方法对系统频域特征的提取能力。
通过计算频谱分辨能力指标,可以评估辨识方法在不同频率下对系统信息的提取精度,频谱分辨能力越高,辨识方法对系统频域特征的分析能力越强。
matlab中的system identification toolbox使用
matlab中的system identification toolbox使用系统辨识工具箱(System Identification Toolbox)是MATLAB中用于进行系统辨识的工具包,它提供了一系列用于建立、分析和验证数学模型的函数和工具,并可用于模型预测控制、滤波器设计、故障检测等各种应用领域。
系统辨识是指通过给定的输入输出数据,确定系统的数学模型或者估计系统的参数。
在工程领域中,系统辨识通常用于建立数学模型的目的,然后用于分析和控制系统的行为。
系统辨识工具箱提供了各种方法和算法,使用户能够根据实验数据进行参数估计、模型建立和验证。
下面将介绍一些系统辨识工具箱的功能和使用方法。
首先是参数估计。
系统辨识通常涉及到对系统参数的估计,以获得准确的数学模型。
系统辨识工具箱中的函数可以根据给定的输入输出数据,使用最小二乘法或其他优化算法,对系统参数进行估计。
例如,使用函数`ar`可以进行自回归(AR)模型的参数估计,使用函数`armax`可以进行自回归滑动平均外部输入(ARMAX)模型的参数估计。
其次是模型建立。
系统辨识工具箱提供了多种模型结构,包括自回归(AR)、移动平均(MA)、自回归滑动平均(ARMA)以及自回归滑动平均外部输入(ARMAX)等模型。
用户可以根据实际情况选择合适的模型结构,并使用系统辨识工具箱中的函数进行模型的建立。
例如,使用函数`tfest`可以进行传递函数模型的建立,使用函数`nlarx`可以进行非线性自回归外部输入(NARX)模型的建立。
另外,系统辨识工具箱还提供了对系统辨识结果进行验证和分析的功能。
用户可以使用工具箱中的函数进行模型的预测和仿真分析,以验证模型的准确性和可靠性。
例如,可以使用函数`predict`进行模型的预测,使用函数`compare`进行模型的仿真分析。
此外,系统辨识工具箱还包含了一些用于模型结构选择和参数优化的函数和工具。
用户可以使用这些函数和工具进行模型的优化和改进。
matlab系统辨识工具箱使用的算法
matlab系统辨识工具箱使用的算法MATLAB的系统辨识工具箱使用多种算法来进行系统辨识。
这些算法通常包括以下几种:
1. 最小二乘法(Least Squares):这是最常用的系统辨识方法。
最小二乘法试图找到一组参数,使得实际数据和模型预测之间的误差平方和最小。
2. 极大似然估计(Maximum Likelihood Estimation):这种方法基于数据生成的模型概率密度函数,通过最大化似然函数来估计模型参数。
3. 递归最小二乘法(Recursive Least Squares):这是一种在线算法,可以在数据流中实时更新模型参数。
4. 扩展最小二乘法(Extended Least Squares):这种方法可以处理包含噪声和异常值的数据,通过引入权重来调整误差平方和。
5. 非线性最小二乘法(Nonlinear Least Squares):对于非线性系统,需要使用非线性最小二乘法来估计参数。
6. 遗传算法(Genetic Algorithms):这是一种启发式搜索算法,通过模拟自然选择和遗传过程来寻找最优解。
7. 粒子群优化算法(Particle Swarm Optimization):这是一种基于群体智能的优化算法,通过模拟鸟群、鱼群等生物群体的行为来寻找最优解。
以上这些算法都是MATLAB系统辨识工具箱中常用的算法,根据具体的问题和数据,可以选择最适合的算法来进行系统辨识。
matlab系统辨识工具箱
输入参数A, B, C , D, F分别为多项式A(q), B(q), C (q), D(q), F (q)的系数矩阵。
例3 A = [1 -1.5 0.7];B = [0 1 0.5];C = [1 -1 0.2];m0 = idpoly(A,B,C);
5
3.辨识的内容和步骤
系统辨识的内容主要包括以下四个方面: (1)实验设计; 系统辨识实验设计需要完成的工作包括选择和确定输入 信号、采样时间、辨识时间和辨识的模式。 (2)模型结构辨识; 模型结构辨识包括模积类和模型结构参数的确定两部分 内容。模型类的确定上要根据经验对实际对象的特性 进 行一定程度上的假设 。在确定模型类之后,就可根据对 象的输入输出数据,按照一定的辨识方法确定模型结构 参数。 (3)模型参数辨识; 最小二乘法及各种改进算法 (4)模型检验。 不同时间区间数据、数据交叉、数据长度、输出残差序 列的白色型
7. idfrd
功能:构造idfrd模型 语法: h = idfrd(Response,Freq,Ts) h = idfrd(Response,Freq,Ts,'CovarianceData',Covariance, ... 'SpectrumData',Spec,'NoiseCovariance',Speccov,'P1', ... V1,'PN',VN) h = idfrd(mod) h = idfrd(mod,Freqs) 说明:
4. idgrey
功能:根据M文件Βιβλιοθήκη 义idgrey模型 语法:13
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图5 开环阶跃响应曲线 表1 Ziegler-Nichols法整定控制器参数 控制器类型 比例度δ/% 积分时间Ti 微分时间τ
P
PI PID
T/(K*L)
0.9T/(K*L) 1.2T/(K*L)
∞
L/0.3 2.2L
0
0 0.2L
3、基于PSO的PID参数优化
3.1 PSO 粒子群优化算法(PSO)是一种进化计算技术,它是一种模拟鸟类觅食的优 化算法。PSO算法主要有以下几个定义: 1)适应度函数: fitness(),也就是我们拟解决问题的目标函数,PSO主要通过搜索未知参 数(参数的个数也称为粒子的维数)使适应度函数达到最优解。适应度函数 达到最优时的参数也就是我们所需要的最优参数。 2)个体极值和全局极值 个体极值指在粒子自身所找到的最优解,而全局极值则是在群体中找到的最 优值。 3)PSO主要公式: k 1 k k k k k w vid c1 rand gd ( pgd xid ) c2 randid ( pid xid ) ① vid k 1 k k 1 ② xid xid vid
2、采用工程整定方法进行参数预估计
2.1 使用工程整定的目的
PID工程整定方法:临界比例法、衰减曲线法、ziegler-Nichols整定。 本次预估计采用ziegler-Nichols整定,对PID三个参数Kp、Ki、Kd进 行预估计,作为后面采用PSO(Particle Swarm Optimization)粒子 群优化算法参数优化的一个初始值,并设定参数范围做好铺垫。
图1 辨识工具箱界面
图2 模型选择界面
图3 输入数据和输出数据
图4 辨识模型输出与实际输出比较
相似度达到96%,辨识出来的模型表示为三阶系统:
K * exp(Td s) 2.8236* exp(0.33032 s) G( s ) 2 2 s 0.001944 s 2 )(1 1.2763 s) (1 (2 * zeta *TW )s TW s )(1 Tp s) (1 0.00548
k | vid | Vmm k | xid | X mm
k v 式中, id 代表的是第k代的第i个粒子第d维的速度
k xid 代表的是第k代的第i个粒子d第维的位置:
为惯性因子; 为速度比约束因子; 为粒子个体位置最优值; 为群
体位置最优值; 是加速因子, 是在 [0,1] 之间的随机数。 3.2 适应度函数选择 fitness()结合PID控制根据误差性能指标进行选取。误差性能指标主要 有以下三种: e t dt (1)绝对误差积分(IAE)性能指标 IAE 0 (2)平方误差积分(ISE)性能指标 ISE e2 t dt 0 ISTE te2 t dt (3)时间与误差平方乘积积分(ISTE)性能指标 0 按照不同的误差性能指标进行PID控制器参数整定,所得到的系统闭环控 制效果也会不同。IAE性能指标对小偏差的抑制能力比较强;ISE性能指标着重 于抑制过渡过程中大偏差的出现; ISTE性能指标在缩短调节时间的同时还可控 、 制大偏差。
、
开始
初始化参数,包括维数、 粒子数,加速因子等
kp=0.3981, ki=0.3981,kd=0.1000
给个体随机赋值
根据PSO 进行迭代, 进行速度和位置更新
对个体速度和位置 进行限幅处理 根据适应度函数求取 个体极值和全局极值 N 迭代次数<个体数 Y 结束
2.2 Ziegler-Nichols整定
Tk
k
先使系统在开环时候输入单位阶跃信号,观察阶跃响应曲线。记录稳 态值,延时时间和时间常数,是指上升这段时间内的拟合直线的两个 时间点之差。根据曲线利用公式计算Kp、Ki、Kd。
K
延时时间L、放大 系数K和时间系统 T如图5所示。 得到 K=2.8236,L=0.5 T=1.3。根据表1 计算得到三个参数 kp=1.1,ki=1/Ti=1. 38,kd=0.066箱的参数估计 2、采用工程整定方法进行参数预估计 3、基于PSO的PID参数优化 4、下一步工作
1、基于系统辨识工具箱的参数估计
• 采用matlab的系统辨识工具箱,只需要输入需要辨识的输 入数据和输出数据,选择一定的系统模型,经过一定的数 据预处理,最终得到所需要模型的参数估计值,从而实现 系统的辨识。 • 在matlab输入ident,即可以出现如图1所示的界面,在 import data里导入数据,在estimate里选择需要的模型。