利用GPS驯服校频技术提高晶振性能
GPS定位系统误差校正技术及精度

GPS定位系统误差校正技术及精度GPS定位系统是一种全球性的卫星定位系统,广泛应用于航空航天、交通、电信、测绘等领域。
然而,由于各种原因,GPS定位系统存在一定的误差,因此需要进行误差校正以提高其精度。
误差校正是通过对GPS信号中的误差进行测量和分析,然后对定位结果进行修正的过程。
根据GPS定位系统的误差来源,可以将误差分为两类:系统误差和随机误差。
系统误差主要是由卫星时钟不精确、电离层延迟和大气延迟等因素引起的。
对于系统误差,常用的校正技术有卫星时钟校正、电离层和大气延迟模型校正等。
卫星时钟校正是通过对GPS卫星上的原子钟进行精密测量,得到它们与标准原子钟之间的时间误差,并将这些误差传送到接收机,从而校正接收机上的卫星钟偏差。
这样可以有效减小由于卫星时钟不精确引起的系统误差,提高定位精度。
电离层延迟是指GPS信号在穿过电离层时,由于电离层的电子密度分布不均匀,造成信号传播速度的变化,从而引起定位误差。
为了校正电离层延迟,一种常用的技术是双频观测与组合,即利用接收机同时接收L1和L2频率的信号,并对其进行组合处理。
通过计算两个频率之间的差异,可以得到电离层延迟的近似值,然后根据模型进行误差校正。
大气延迟是指GPS信号在穿过大气层时,由于大气密度的变化而引起的信号传播速度的变化。
为了校正大气延迟,一种常用的技术是差分定位技术。
差分定位技术需要设置参考站和用户站,通过比较参考站和用户站接收到的GPS信号,测量出它们之间的差异。
这些差异就反映了大气延迟对定位的影响,从而可以进行相应的校正。
随机误差主要是由于多路径效应、接收机噪声和多普勒效应等因素引起的。
对于随机误差,常用的校正技术有滤波器、克拉姆-拉勒伯(Kalman Filter)滤波和差分定位技术。
滤波器可以通过对GPS信号进行滤波和平滑处理,减小多路径效应和接收机噪声带来的误差。
常用的滤波器包括卡尔曼滤波器、无源滤波器等。
克拉姆-拉勒伯(Kalman Filter)滤波是一种递归滤波器,可以根据已知的过去状态和观测值来预测当前状态,并用于误差校正。
基于GPS驯服技术的高稳频踪设计
De i n o g t biiy f e ue y s nt s z r b s d n G PS t m e t c sg fhi h sa lt r q nc y he i e a e o a e hno o y lg
XU o ho g,LITi— he g,L n Gu — n ec n IXi g
t n lt me t c n lg ,h s meh d a o t d DP L a d Ka ma l r a i me i o a h e e OC i a a e h o o y t i t o d p e L n l n f t r h t t c iv XO al GP t i me h d o i e t c ti S, s h to
c m bie o n d GPS whih ha g o tbii  ̄e e y wi c d hih lng sa lt y qu nc t OCXO h whih ha g ho tsa lt r qu nc a le c d hih s r tbiiy fe e y, nd f tr GPS i
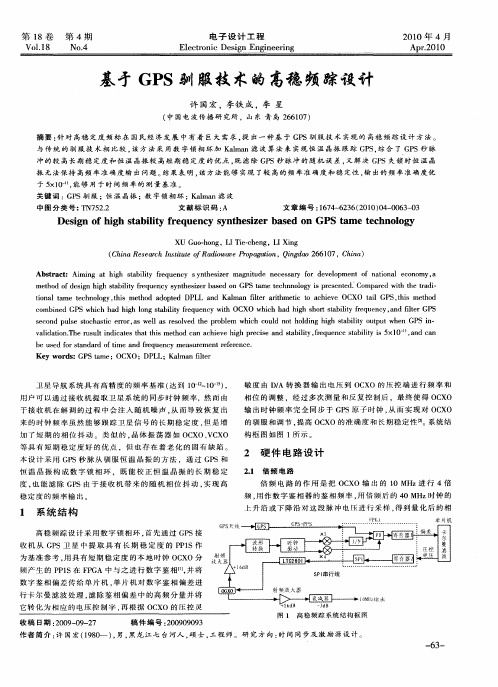
摘 要 : 对 高 稳 定 度 频 标 在 国 民 经 济 发 展 中有 着 巨大 需 求 , 出一 种 基 于 G S驯 服 技 术 实 现 的 高稳 频 踪 设 计 方 法 。 针 提 P 与 传 统 的驯 服 技 术 相 比较 。 方 法 采 用 数 字 锁 相 环 加 K l a 该 am n滤 波 算 法 来 实现 恒 温 晶振 跟 踪 G S 综 合 了 G S秒 脉 P . P 冲 的较 高 长期 稳 定 度 和 恒 温 晶振 较 高短 期 稳 定 度 的优 点 , 滤 除 G S秒脉 冲 的 随 机 误 差 , 解 决 G S失 锁 时恒 温 晶 既 P 又 P 振 无 法保 持 高 频 率 准 确 度 输 出 问题 。 果 表 明 , 方 法 能 够 实现 了较 高 的 频 率 准 确 度 和 稳 定性 , 出的 频 率 准确 度 优 结 该 输
GPS驯服压控恒温晶振的研究与实现
GPS驯服压控恒温晶振的研究与实现作者简介:李启丙(1976-),男,重庆开县人,硕士研究生,讲师,主要研究方向:电子技术应用与EDA。
摘要:利用GPS提供的高稳定度的授时信号控制本地压控恒温晶振的频率。
使用VHDL语言描述误差数字信号产生模块,并在CPLD芯片中实现。
提高了本地压控恒温晶振的频率日稳定度和年稳定度,增强了压控恒温晶振的工作环境,克服了普通恒温振的频率漂移和机械恒温晶振机械调整的繁琐与不便。
关键词:压控恒温晶振;年稳定度;频率漂移。
中图分类号:TP211.5笔者在设计时间校验仪中,测量误差主要产生在时钟信号源的误差上,因此如何产生一个高精度的时钟源是关键之所在。
石英晶振的稳定性受环境影响很大并且有累计误差不适合使用在昼夜温差大的室外。
而且还存在一个致命的弱点,即在工作过程中的频率会单方向地发生老化。
为此,人们考虑用原子跃迁运动作基准来修正老化效应,从而构成现代原子频率标准[1]。
随着 GPS技术的引进与推广,人造卫星开始作为另一种时间源提供精确、可靠、稳定的时间和频率标准[2]。
随着时间的增长恒温晶振的频率稳定度会逐渐下降,影响测量精度。
如果选用带机械调整的恒温晶振,仪器在工作一段时间后就必须送厂里进行调整。
GPS定时接收设备内采用高精度的频率信号,成本高。
而采用普通恒沮晶振,就需耍每秒同GPS秒同步,造成设备抽出信号抖动增大[3]。
鉴于以上问题,我们选用GPS授时自动驯服恒温晶振的频率。
保证恒温晶振的稳定度。
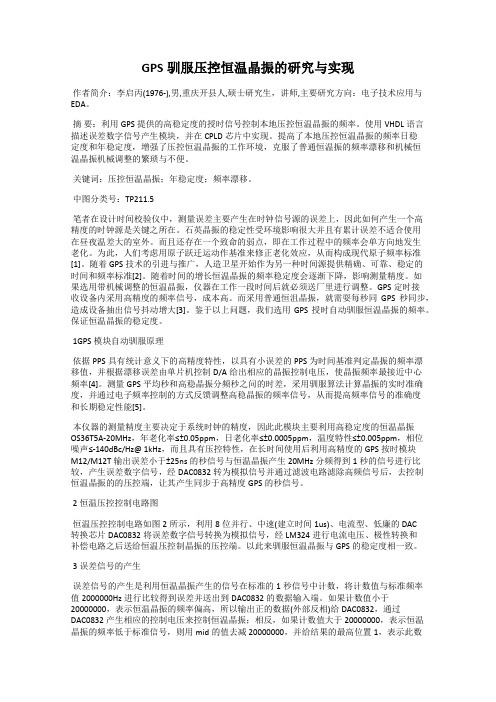
1GPS模块自动驯服原理依据PPS具有统计意义下的高精度特性,以具有小误差的PPS为时间基准判定晶振的频率漂移值,并根据漂移误差由单片机控制D/A给出相应的晶振控制电压,使晶振频率最接近中心频率[4]。
测量GPS平均秒和高稳晶振分频秒之问的时差,采用驯服算法计算晶振的实时准确度,并通过电子频率控制的方式反馈调整高稳晶振的频率信号,从而提高频率信号的准确度和长期稳定性能[5]。
基于GPS驯服晶振的高精度频差测量

• 82•基于GPS驯服晶振的高精度频差测量西南民族大学电气信息工程学院 甘 桂 彭良福 吴万强在5G移动通信系统中,为了实现高精度和高稳定度的时钟源,在时钟驯服方案中通过FPGA实现低频粗计数与高频细计数来测量本地晶振与GPS信号的频差,为后续送入PID控制模块提供了良好的输入。
仿真结果表明,用50MHz晶振倍频到的100MHz测量细计数,可以达到10ns 的精度。
在实际应用中,可以倍频到更高频率进行误差项的细测量。
引言:在移动通信发展的5G 时代,通信网络对时钟频率的稳定性和精确度要求越来越高,与参考时间源的误差需要控制在±1.5µs 之内。
GPS 是当今授时精度最高、应用最为广泛的全球定位系统。
基于GPS 接收机的各种同步授时装置已广泛应用于通信、电力、金融和航天等领域。
时钟驯服指的是利用卫星授时标准信号校准锁定高稳定的本地晶振。
晶振驯服可选用不同的方法,以GPS 卫星授时时间驯服晶振优势明显,这种方法结合了卫星授时的长期稳定性和晶振的短期稳定性,具有很好的应用前景。
1.驯服原理GPS 信号有非常好的长期稳定性,但它的短期稳定性比较差。
用高精度的GPS 信号和本地高稳定的时钟结合在一起,使用GPS 驯服本地晶振,可以明显改善本地时钟输出的稳定性。
时钟驯服的基本原理是通过GPS 授时接收机接收到1pps 频率的信号和本地振荡器的信号进行频率测量、对比算出频差。
把得到的频差送到滤波器滤除噪声,然后进入PID 控制模块通过分频电路或电压控制调节其频率,最后使本地晶振的频率与接收到GPS 信号的频率一致,达到驯服本地晶振的目的。
对GPS 接收机接收的数据进行处理,测出频差的过程在这个系统中占着十分重要的地位,其测量精度直接决定了时钟驯服的精度上限。
2.测频系统实现在测量一个信号频率的时候,在时间已知的情况下,测量脉冲的个数,就可以计算出这个信号的频率。
图1 直接计数法2.1 直接计数法原理测量一段时间间隔内时钟脉冲的个数最常用的方法是直接计数法。
基于TDC的GPS驯服恒温晶振系统设计

恒 温晶振 系统 。使 用 G S对恒 温 晶振进 行 实 时校 准 , P 获得 了高精 度 的频 率信 号 。通 过 T C测 量 时 D
差数 据计 算得 到 恒温 晶振 的频 率准确 度 , 时差测量精 度 达到 20p。采 用优 化 的递推 平均 滤 波算 其 5 s
法 对 时差数据 进行 滤 波处理 , 消除 了 G S秒信 号抖 动 引入 的干扰 , P 缩短 了频 率驯服 时间 , 率驯服 精 频
De in o sg fa GPS Dicp i e CXO y tm s d o sil d O n S se Ba e n TDC L i-a 1 H NG Tn U J h i, Z A og一 a 2 2 T iohn 2 ,AO Xa -og , H oqa 2 C u -a2 a-in , h nh /
t n cn rah2 0p i a c 5 s.Afe e i tra a ap o e s d w t p i z e u sv v r g le g rt m,itr o e trt ne v d t r c s e h o t h l i mie rc rie a e a e f tra o h d i l i ne— f rn e o e c fGP e o d d t ei g C v ie n icp ie i ffe u n y c n b h re e . e S s c n i rn a b a od d a d ds il d t h n e n me o rq e c a e s otn d Ke r s: a u me ta d c n rls se ;i y wo d me r s e n n o to y tm t me—fe e c y tm;i y c rn z t n;i o dgt Ol r q n y s se tme s n h o iai tme t ii C I— u o l a v re ; S d s i l e : v H c nr le r sa s i ao etr GP icpi d o e — o told c ytlo cl tr n l
gps时钟驯服晶振在南京大学成功案例

gps时钟驯服晶振在南京大学成功案例2017年10月初,西安同步电子科技有限公司自主研发生产的gps 时钟驯服晶振在南京大学投入使用,这套驯服晶振已稳定运行数月,已将我公司纳为合格供应商。
一、时钟驯服晶振简介时钟驯服的基本原理是利用卫星授时接收机提供的固定频率信号,与本地振荡器产生的振荡信号进行比对,获得频率差;再通过对本地振荡器的调节,使振荡频率与卫星的振荡频率基本一致,在频率调整过程中,还需要对本地振荡器的相位进行补偿,使本地振荡器输出的分频秒信号与接收机输出的秒信号差值在一定范围内.卫星授时接收机由于信号传输距离长,易受干扰等特点,其输出的1pps 具有一定的抖动,秒信号包含多种误差成分,如:卫星时钟误差:星历误差:电离层的附加延时误差:对流层的附加延时误差:多路径误差:接收机本身的误差。
采用GPS授时接收机对高稳晶振进行升级改造,研制高精度时间间隔计数器电路,测量GPS平均秒和高稳晶振分频秒之间的时差,采用驯服算法计算晶振的实时准确度,并通过电子频率控制的方式反馈调整高稳晶振的频率信号,从而提高频率信号的准确性和稳定性。
二、GPS驯服晶振利用高精度的时间间隔测量方法测得GPS信号和本地秒信号的相位差,并经计算机处理后转换成频率差,然后通过高稳晶振的压控调谐对高稳晶振输出频率进行调整,由锁相环回路进行控制使高稳晶振锁定到GPS时钟的准确度,从而完成对高稳晶振的驯服校频过程。
对输入本地频标和GPS秒脉冲信号的鉴相,通过高精度时间间隔测量,测量出两信号的相位差,并将转换为电压值。
然后通过压控OCXO端口对高稳晶振进行压控调整,通过锁相环使本地频标锁定到GPS时钟上。
影响误差分析其中主要影响是GPS引入误差。
又可分为以下几方面的误差:1.1与GPS卫星相关的误差1.1卫星星历误差卫星星历误差是指卫星星历给出的卫星空间位置和卫星实际位置间的偏差,由于卫星空间位置是由地面监控系统根据卫星测轨结果计算求得的,所以又称为卫星轨道误差。
可同步于GPS的FPGA恒温晶振频率校准系统设计
可同步于GPS的FPGA恒温晶振频率校准系统设计三维大地电磁勘探技术是以面元为单位,多分量采集站为中心,多远参考、互参考和密集布点为特征来获得高质量的采集数据。
野外施工时,为了保持站点间同步地进行数据采集,一般采用GPS秒脉冲信号或恒温晶振的定时信号来同步各个采集站点。
前者在恶劣的施工环境下常会因为各种干扰而发生跳变,同步效果并不理想。
后者长时间存在频率漂移,同样无法维持长时间的同步采集。
为解决以上问题,本文将GPS授时信号用于校准各站点的压控晶振,之后再使用晶振分频得到定时信号来同步各采集站点。
这样不仅克服了GPS授时信号易受外界干扰的缺点,也解决了晶振频率随时间漂移的问题,能获得较为理想的同步信号。
为了使本地晶振长时间地同步于GPS系统,就需要不断测量GPS授时信号与本地晶振的分频信号的时间间隔,再根据测量数据来校准和同步本地晶振。
因此,时间间隔测量的准确性是保证频率校准系统工作性能的关键。
本文基于FPGA集成度高、高速和高可靠性的特点,介绍了晶振频率校准系统在FPGA中的设计方法。
系统的特点是使用FPGA内部进位逻辑构造延迟线来实现时间间隔测量,大大提高了测量分辨率,同时使用FPGA嵌入式软核处理器PicoBlaze 对系统状态进行监控,并对测量数据进行滤波处理,充分发挥了FPGA的集成优势。
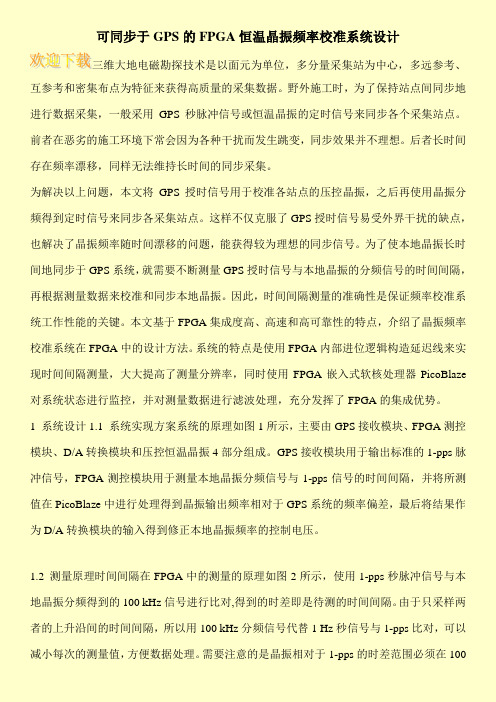
1 系统设计1.1 系统实现方案系统的原理如图1所示,主要由GPS接收模块、FPGA测控模块、D/A转换模块和压控恒温晶振4部分组成。
GPS接收模块用于输出标准的1-pps脉冲信号,FPGA测控模块用于测量本地晶振分频信号与1-pps信号的时间间隔,并将所测值在PicoBlaze中进行处理得到晶振输出频率相对于GPS系统的频率偏差,最后将结果作为D/A转换模块的输入得到修正本地晶振频率的控制电压。
1.2 测量原理时间间隔在FPGA中的测量的原理如图2所示,使用1-pps秒脉冲信号与本地晶振分频得到的100 kHz信号进行比对,得到的时差即是待测的时间间隔。
基于GPS的恒温晶振频率校准系统的设计与实现

基于GPS的恒温晶振频率校准系统的设计与实现张帆;陈锟;朱正平;蓝加平【摘要】Aiming at high-precise frequency source magnitude necessary at present, a frequency calibration system for OCXO is designed by FPGA. A DPLL is designed to regulate the frequency of OCXO. The main idea behind is to use the 1PPS signal, which comes from GPS receiver, as a reference to calibrate the OCXO (oven controlled crystal oscillator) by integrating the long-term stability, excellent tracking and holding characteristic of GPS and the short-term accuracy of OCXO. The design principle and method are described in detail .The test results indicates that the system can fast achieve high precise and stability, frequency error is lower than 0.01 Hz. It can be used for standard of time and frequency measurement reference.%针对目前广泛对高精度频率源的需求,利用FPGA设计一种恒温晶振频率校准系统.系统以GPS接收机提供的秒脉冲信号为基准源,通过结合高精度恒温晶振短期稳定度高与GPS长期稳定特性好、跟踪保持特性强的优点,设计数字锁相环调控恒温晶振的频率.详细阐述系统的设计原理及方法,测试结果表明,恒温晶振的频率可快速被校准到10 MHz,频率偏差小于0.01 Hz,具有良好的长期稳定性,适合在多领域中作为时间频率的标准.【期刊名称】《电子设计工程》【年(卷),期】2013(021)008【总页数】4页(P91-94)【关键词】频率校准;恒温晶振;数字锁相环;FPGA【作者】张帆;陈锟;朱正平;蓝加平【作者单位】中南民族大学电子信息工程学院,湖北武汉430074【正文语种】中文【中图分类】TN752.2时钟技术在现代科学技术中有着广泛的应用,许多领域对时间指标的要求越来越高,如电力、通讯、军事、航空航天等,都需要高精度的同步时钟作为参考,协调整个系统的正常运行[1]。
时钟驯服原理
时钟驯服原理
时钟驯服是一种利用外部参考信号来校正本地时钟的技术,其基本原理是:
1. 频率比对:卫星授时接收机提供的固定频率信号与本地振荡器产生的信号进行比对,以获得两者之间的频率差。
2. 频率调整:根据频率差,调节本地振荡器的频率,使其与卫星的振荡频率基本一致。
这个过程中,通常需要通过时钟驯服单元来实现。
3. 相位补偿:在频率调整的同时,对本地振荡器的相位进行补偿,确保本地振荡器输出的分频秒信号与接收机输出的秒信号差值控制在一定的范围内。
4. 高稳定度晶振:GPS驯服晶振(GPSDO)通常包含一个高稳定度的晶体振荡器,它被GPS/BDS接收机输出的秒脉冲信号所驯服。
这样的组合可以在不破坏晶振短期稳定性的前提下,提高其长期稳定性。
5. 守时精度:GPSDO的工作原理类似于锁相环(PLL),但现代的GPSDO多采用微控制单元(MCU)来取代PLL,以实现对频率、温度和其他环境参数的补偿,从而达到更高的守时精度。
6. 系统组成:一个完整的卫星驯服时钟系统通常包括卫星定时接收机、频率基准、时钟驯服单元和时钟输出接口等部分。
总的来说,时钟驯服技术广泛应用于需要高精度时间同步的领域,如电信网络、电力系统、金融交易等,它能够提供稳定且精确的时间参考,确保系统的高效运行。
GPS定位精度提高及其应用技术研究

GPS定位精度提高及其应用技术研究随着信息技术的快速发展,全球定位系统(GPS)定位技术越来越成熟,精度也越来越高。
在无人驾驶、无人机、物联网等领域,GPS定位技术已经成为关键技术之一。
本文将从GPS定位精度提高和其应用技术研究两个方面进行阐述,以期对GPS技术的深入理解和发展起到积极的推动作用。
一、GPS定位精度提高GPS技术的核心在于卫星导航,随着卫星技术的发展和人工智能算法的不断改进,GPS定位精度随之提高。
以下是几种常见的GPS定位精度提高的技术。
1. 多晶片校正技术多晶片校正技术是一种很常见的提高GPS定位精度的方法。
该技术是通过使用多颗接收机芯片同时接收GPS信号,计算每颗芯片的偏离值,然后将这些偏离值进行去除、协同计算,最终能够精准定位。
2. 实时差分技术实时差分技术是通过在接收端通过收到的基准站信号与基准差分更新完成卫星的卡尔曼滤波矩阵计算从而获得更精确的GPS定位。
在差分技术中,测量误差在基准站进行测量和校正,接收机通过收到基准站的辅助信息快速计算出位置信息,从而提高定位精度。
3. 定位滤波算法定位滤波算法是GPS定位精度提高的一种重要方法。
它可以通过使用 Kalman 滤波算法对现有数据进行分析和计算,并通过原始数据中的误差和噪音来纠正定位误差。
二、GPS技术在现实生活中的应用GPS技术的应用涉及到多个领域,特别是在军事、空气航天、交通运输、环境监测、移动通讯、金融等领域,GPS技术无处不在。
1. 智能导航系统随着城市的发展,交通越来越拥堵,GPS智能导航系统的应用愈发广泛。
人们可通过GPS导航软件快速查找目的地路线、避开拥堵路段,方便快捷的到达目的地。
如今的GPS导航除了提供行车时的导航功能外,还可以显示周围的景点和美食,让旅行更加本地化,便于人们更好地了解旅游环境。
2. 物流运输管理系统在物流运输中,GPS系统可以帮助物流公司缩短货物的运输时间、降低运输成本和保障货物的安全性。
科技成果——GPS北斗卫星时钟驯服高精度晶体振荡器

科技成果——GPS/北斗卫星时钟驯服高精度晶体振荡器所属领域电子信息成果简介GPS/北斗卫星时钟驯服高精度晶体振荡器,以高速微处理器为核心,选用高精度授时型GPS接收机/北斗单向授时接收机,提供高可靠性、高冗余度的时间基准信号,并采用精准的测频与智能驯服算法技术驯服晶体振荡器,使晶体振荡电路输出的时间同步信号精密同步在GPS/北斗时间基准上,并输出短期和长期稳定度都十分优良的高精度同步信号。
由于装置输出的1PPS等时间信号是内置振荡器的分频秒信号输出,同步于GPS/北斗信号但并不受GPS/北斗秒脉冲信号跳变带来的影响,相当于UTC时间基准的复现。
采用了“智能学习算法”的GPS 时钟,在驯服晶振过程中能够不断“学习”晶振的运行特性,并将这些参数存入板载存储器中。
当外部时间基准出现异常或不可用时,装置能够自动切换到内部守时状态,并依据板载存储器中的参数对晶体振荡器特性进行补偿,使守时电路继续提供高可靠性的时间信息输出,同时避免了因晶体振荡器老化造成的频偏对守时指标的影响。
应用范围GPS/北斗卫星时钟驯服高精度晶体振荡器,采用全模块化结构设计,其输入、输出、电源等均可灵活配置,对于输出信号的种类和数量都可根据需要灵活选择配置。
具有标准RS232、RS422/485、脉冲、IRIG-B输出等接口形式,可以适应各种不同设备的对时需要,广泛应用于电力、金融、通信、交通、广电、石化、冶金、国防、教育、IT、公共服务设施等领域。
技术特点1、内部晶体振荡单元采用了先进的时间频率测控技术与智能驯服算法,晶体选用高精度恒温晶体振荡器,使装置准确度优于7×10-9(0.92μS/分钟),即在外部时间基准异常的情况下,每天时钟走时误差不超过0.6mS。
2、选用高性能、宽范围开关电源,工作稳定可靠。
3、支持单GPS、单北斗、双GPS、双北斗、GPS/北斗双系统卫星接收机配置。
4、应用GPS授时技术/北斗授时技术/B码基准解码接收技术/高稳晶体振荡器守时技术授时,实现多基准冗余授时,能够智能判别GPS信号、北斗信号、外部B码时间基准信号的稳定性和优劣,并提供多种时间基准配置方法。
GPS信号校准晶振信号频率源误差在线修正方法

0 引 言 随着航 空航天技 术 的不断发 展 ,当前 航天测 控设
备 的 计 量 测 试 越 来 越 需 要 高 准 确 度 的 时 间 频 率 标 准 。加之 一些 测试 计量 通 常在 野外 条件 下实 施 ,环境 特 殊 ,也要 求频 率标 准 源 能溯 源简 单 、使用 便 捷 。高
Abstract: The method of using GPS second signals to calibrate crystal oscillators can achieve
high—accuracy time and f requency standard.However,because of random jitter and large outliers
收 稿 日期 :2015-09—03:收 到修 改稿 日期 :2015—11—17 基 金 项 目 :国家 杰 出青 年 基 金 项 目(61025014)
国 家 自然 科 学 基 金 项 目(61370031) 作 者 简 介 :宁 玉 磊 (1989一),男 ,山 东 聊 城 市 人 ,硕 士 研 究 生 , 专业方 向为可靠性工程及故 障预测 。
序 列 加 权 卡 尔 曼 滤 波算 法 应 用 到某 GPS校 准 晶振 频 率 源 系 统 中 ,能使 系统 输 出频 率 准 确 度 优 于 1.OxlO—z。
关键词 :GPS校频 ;晶振 ;联合估计 ;卡尔曼滤波 ;野值 ;新息
文 献 标 志 码 :A
文 章 编 号 :1674—5124(2016)04—0015—05
in GPS—Clock, frequency excursion of crystal oscillators caused by aging and temperature can produce errors in f requency calibration. To solve this problem , a f requency difference model for GPS-Clock in synchronism with the cry stal oscillator is proposed.To be more specific, Kalman filter algorithm , which combined with the estimation of states and parameters, is used to correct the random noise errors in frequency difference signals online. The influence of outliers form ed by
基于GPS校准晶振的高精度时钟的设计

基于GPS校准晶振的高精度时钟的设计
摘要:文章结合高精度晶振无随机误差和GPS秒时钟无累计误差的特点,采用GPS测量监控技术,对高精度晶体振荡器的输出频率进行精密测量和调节,使晶振的输出频率同步在GPS系统上,从而提供高精度的时钟信号。
根据此方法研制了具有高性价比的高精度时钟发生装置,并成功的应用
于通信系统中。
0 引言
本文结合GPS的长期稳定性校准晶振频率,采用GPS测量监控技术,对晶体振荡器的输出频率进行精密测量和调节,使晶振的输出频率同步在GPS系统上,提供高精度的时间频率基准信号。
1 高精度GPS校准晶振时钟设计中应注意的问题
GPS秒脉冲的高精度是统计意义下的,对一个具体的秒脉冲,其偏
差可能达到200ns,另外,GPS接收机短期失锁、卫星试验、电磁干扰等因素,都可能造成秒脉冲的失真,如果直接使用GPS的秒脉冲信号来校准时钟,。
基于TDC的GPS驯服恒温晶振系统设计
基于TDC的GPS驯服恒温晶振系统设计陆加海;张同双;陶小红;陈浩谦;李春海【摘要】为满足测控系统对高精度时间频率的要求,设计了一种基于时间数字转换器(TDC)的驯服恒温晶振系统.使用GPS对恒温晶振进行实时校准,获得了高精度的频率信号.通过TDC测量时差数据计算得到恒温晶振的频率准确度,其时差测量精度达到250 ps.采用优化的递推平均滤波算法对时差数据进行滤波处理,消除了GPS 秒信号抖动引入的干扰,缩短了频率驯服时间,频率驯服精度优于3×10-11.【期刊名称】《电讯技术》【年(卷),期】2011(051)012【总页数】4页(P113-116)【关键词】测控系统;时间频率系统;时间同步;时间数字转换器;GPS驯服;恒温晶振【作者】陆加海;张同双;陶小红;陈浩谦;李春海【作者单位】上海交通大学,上海200030;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431;中国卫星海上测控部,江苏江阴214431【正文语种】中文【中图分类】TN75;P128.151 引言测控系统要求有高精度的时间频率系统。
为了保持站点间时间同步,一般采用铷原子钟或恒温晶振(Oven-Controlled Crystal Oscillator,OCXO)来提供时间频率信号。
前者的成本较高,后者频率准确度较差,不能满足测控系统的指标要求。
为解决上述问题,本文采用GPS对恒温晶振进行驯服,综合了GPS时间信号长稳指标高的优点和恒温晶振短稳指标高的优点,从而获得了高稳定度和高准确度的频率信号。
为了计算恒温晶振相对于GPS的频率偏差,需要长时间测量GPS秒信号与恒温晶振分频信号之间的时差,通过时差计算得到频率偏差,再根据频率偏差来校准恒温晶振,所以时差测量的精度直接影响到频率驯服的精度。
文献[1]采用FGPA延迟线内插法测时差,测量精度达到121 ps,但测量线性化较差、成本高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用GPS驯服校频技术提高晶振性能曾 亮 孟庆杰 徐 伟(北京航天飞行控制中心,北京100094)摘 要 采用高精度GPS授时信号驯服校频技术调节高稳晶振的频率,能够提高晶振的准确度和长期稳定性,同时输出同步于GPS系统的时间同步信号。
可以广泛应用于试验部队计量测试、测控通信、时间统一系统中。
还能推广应用到电信、电力等部门,具有很高的经济效益和应用价值。
关键词 高精度GPS授时信号;驯服校频技术;时间同步信号0引 言GPS是一种全球性、全天候的卫星无线电导航系统,可连续、实时的为多用户提供高精度精密时间信息,已经称为世界上应用范围最广、实用性最强的全球精密授时、测距和导航定位系统。
采用低价格GPS高精度授时信号驯服调节高稳晶振的频率,能够提高晶振的准确度和长期稳定性,同时输出同步于GPS系统的时间同步信号。
高稳定度GPS时钟能够广泛应用于试验部队计量测试、测控通信、时间统一系统,为其提供高精度的频率基准信号和时间同步信号。
GPS时钟向试验部队计量单位推广,有利于改进大量高稳晶振频率标准,以插件的形式提高晶振的长期稳定性。
GPS时钟还可以为时统信号提供高精度的时间同步信号,克服单纯GPS接收机授时不稳定以及采用铷钟价格高昂的问题。
高稳定度GPS时钟具有高准确度、高稳定度、低漂移的特点,能够输出近乎铷钟的频率特性,解决晶振老化准确度下降和长期稳定性能差的问题,输出高精度的频率基准和时间同步信号,但价格却远远低于铷钟、铯钟等原子钟,易于推广应用。
1 系统设计GPS接收机能够在跟踪卫星的同时产生精确的1pps(秒脉冲)信号,目前主流的GPS接收机能够输出相对U TC时间精度50ns的1pps信号。
利用该信号采用高精度时间间隔测量技术,将它与本地1pps信号进行比较,按照相位差的变化速率计算出相对频差并考虑本地频标的压控灵敏度,计算、产生出本地频标的控制输出电压。
经过多次测量和反复控制,最终实现把本地频标(高稳定性晶体振荡器)的准确度锁定在GPS标准的准确度上。
从而实现对高稳晶振频率的驯服和调节,提高晶振的准确度和长期稳定性。
采用低成本GPS授时接收机对我单位现有10811高稳晶振进行升级改造,研制高精度时间间隔计数器电路,测量GPS平均秒和高稳晶振分频秒之间的时差,采用驯服算法计算晶振的实时准确度,并通过电子频率控制的方式反馈调整高稳晶振的频率信号,从而提高频率信号的准确度和长期稳定性能。
高稳晶振的分频秒精密同步于GPS输出1pps 信号的平均值,能够克服GPS授时秒跳变、误差带来的影响,具有更高的精度和可靠性。
原理框图如图1所示。
图1 GPS驯服校频技术原理框图2 关键技术211 高精度时间间隔测量技术实现GPS信号对高稳定度晶体振荡器的锁定, 测量与设备 ・6 ・计量技术20081No5必须完成对GPS 信号和本地频标间相位差的高精度测量,即进行高精度时间间隔的测量。
在较短的时间内锁定高稳定度晶体振荡器,使之达到要求的频率准确度。
为了克服模拟法在大测量范围条件下测量精度低的问题,引入了模拟内插法,其测量原理如图2所示。
图2 模拟内插法测量时间间隔原理图212 晶振驯服校频利用高精度的时间间隔测量方法测得GPS 信号和本地秒信号的相位差,并经计算机处理后转换成频率差,然后通过高稳晶振的压控调谐对高稳晶振输出频率进行调整,由锁相环回路进行控制使高稳晶振锁定到GPS 时钟的准确度,从而完成对高稳晶振的驯服校频过程。
对输入本地频标和GPS 秒脉冲信号的鉴相,通过高精度时间间隔测量,测量出两信号的相位差,并将转换为电压值。
然后通过压控OCXO 端口对高稳晶振进行压控调整,通过锁相环使本地频标锁定到GPS 时钟上。
213 IRIG -B 码输出技术系统在完成对高稳晶振频率驯服的同时,从GPS 接收产生的时间信号送至IRIG -B 码输出单元,从而产生标准的IRIG -B 码,提供给用户标准的时间标准信号。
其设计方案如图3所示。
系统将送来的10MHz 信号经可编程移相电路和分频电路后形成1pps 信号输出。
B 码编码控制电路是在单片机的控制下产生B 码编码所需的控制信号,该控制信号中含有时间、特标、站址、时延等需编入B 码的各种信息。
B (DC )码产生电路为可编程器件,在B 码编码控制电路输入信号的控制下产生B (DC )码所需的脉宽编码信号。
图3 IRIG -B 码输出设计3 算法研究与分析受系统误差来源中各项因素的影响,系统精度存在一定误差。
其中系统精度主要由GPS 相关决定,因此应尽可能减小GPS 相关引入的误差,从而提高系统精度。
由于GPS 信号引入了大量噪声,短期抖动较大,系统需要采用有效的滤波和控制算法。
系统采用了kalman 滤波和曲线拟合两种不同的滤波算法。
在鉴相过程中,为了得到相位差值,系统采用了kalman 滤波算法进行控制。
在对鉴相值进行还原过程中,系统采用了曲线拟合算法从而对高稳晶振进行压控。
kalman 滤波是一种基于最小均方误差准则的最优线性时域滤波,采用状态空间的方法描述系统,算法采用递推形式,无静差。
kalman 滤波算法不需要过去的全部观测数据,仅仅根据前一次的估计值和最近一个观测数据来估计当前值。
曲线拟合(Curve -fitting )就是将一组离散的数据以一个近似的曲线方程式来代替。
曲线拟合的方法有很多,一般采用最小二乘法来构造简单的一阶线性方程或是高阶的多项式方程。
利用一阶线性方程进行的曲线拟合称为线性回归(Linear Regres 2sion ),利用高阶多项式方程进行的曲线拟合称为多项式回归(Polynomial Regression )。
4 系统创新点1)系统研究了采用GPS 信号完成对高稳晶振的锁定的方法和应用技术,设计了相关的总体方案,并根据具体的技术指标进行了相关电路的分析设计和硬件实现。
对滤波及控制算法进行了研究分析,建立了完善的数学模型和实际控制算法,大大提高了系统的精度。
解决晶振老化准确度下降和长期稳定性能差的问题,输出高精度的频率基准和时间同步信号,为各项任务提供更准确、可靠、精度更高的 测量与设备 计量技术20081No 5・7 ・时间频率信号。
2)GPS时钟还可以为时统信号提供高精度的时间同步信号,克服单纯GPS接收机授时不稳定以及采用铷钟价格高昂的问题。
系统采用了高精度的时间传递接收机,输出10MHz、5MHz信号,频率准确度<5E-12(24小时平均),短期稳定度:5E-12/s,1pps授时精度:<50ns,IRIG-B码同步精度: <100ns,时间间隔测量误差<10ns。
各项技术指标均为目前国际领先水平,可为任务提供更为稳定、精确的时间同步信号。
3)系统采用了鉴相和锁相电路,鉴相电路精确的完成了对GPS信号和本地频标相位差的测量并按照数学模型转换成电压差。
锁相电路根据算法研究模型完成对高稳晶振的快速、准确的压控调节,使高稳晶振锁定到GPS信号。
4)系统运用了高精度时间间隔测量技术,对GPS信号和本地频标进行了高精度时间间隔测量,测量分辨力较高。
系统还利用了高速的A/D转换模块,保证数据采集和测量的准确、可靠。
5)系统采用了标准的IRIG-B(DC)时间码输出技术,使系统提供的高精度的时间标准信号具有更好的通用性和可靠性。
在保证系统输出信号精度的同时,采用了标准的接口方便用户使用和进一步扩展开发。
6)系统对滤波和控制算法进行了分析研究,采用了kalman滤波和曲线拟合两种算法模型。
在鉴相过程中使用kalman滤波,在鉴相还原过程中使用了曲线拟合,进一步提高系统精度。
参考文献[1]杨会民,田秋成,邢建功,张晓华1基于GPIB接口的自动测试系统[J]1微计算机信息,2005,21(1)[2]张焕林,穆建成1基于GPIB技术的自动测试系统设计[J]1微计算机信息,2005,21(5)[3]汪振科1基于GPIB总线的HP8563E型频谱分析仪检定系统[J]1国外电子测量技术,2007(4)[4]张世箕1自动测试系统[M]1北京:电子科技大学出版社,1990[5]NI Measurement Studio U I(VB)CW Slider Help[M],NI Press,2002储罐底层水厚度的新型电容探针检测技术梁法春 陈 婧(中国石油大学储运与建筑工程学院,东营257061)摘 要 储罐底层水的存在会严重影响储罐有效库容并加速罐底板的腐蚀,鉴于传统底层水检测方法存在的问题,提出了采用单丝电容探针实现底层水实时检测的新方法。
单丝电容探针为表层绝缘的热电偶丝,直径为0135mm,封装在直径为5mm的多孔不锈钢管中。
测试结果表明,电容探针与不锈钢管壁间的电容值与底层水厚度成线性关系,底层水厚度每变化1mm,相应的电容值将变化4195p F,且不受储罐温度以及含油量等其他因素的影响。
单丝电容底层水厚度检测方法不需要和其他设备配合使用,具有精度高、稳定性好的特点,具有广泛的推广前景。
关键词 储罐;底层水;检测;电容探针0 引言油品中通常含有少量乳化油,常时间静置,水就会析出,在储罐底部形成底层水。
罐内底层水的出现会显著影响储罐有效储存容量,使储油量下降;另外,底层水还为电化学腐蚀提供良好的环境,加速罐底板的腐蚀;对于重质油品储罐,当发生火灾事故时,由于底层水的存在,还容易发生沸溢和喷溅,导致火灾事故的扩大。
因此,对储罐底层水进行实时监测,采取相应的安全措施对于储罐的高效、安全运行具有重大的意义。
虽然对储罐的液位测量方法很多[1],但直接能检测出底层水厚度的测量方法却不多见。
人工检尺方法是一种古老的也是至今仍被全世界广泛使用的液位测量方法,根据试水膏颜色变化的界面判断水垫层的高度[2]。
人工检尺法测量方法直观、使用简单,造价低,但劳动强度大,并且无 测量与设备 ・8 ・计量技术20081No5。