位置环增益调整
速度环、位置环增益作用

一文让你了解伺服驱动系统增益的作用以及调整的原则伺服是由3个反馈系统构成:位置环、速度环、电流环,越是内侧的环,越需要提高其响应性,不遵守该原则,则会产生偏差和震动。
由于电流环是最内侧的环,以确保了其充分的响应性,所以我们只需要调整位置环和速度环即可。
调整的主要参数是:位置环增益、速度环增益、速度积分时间常数。
位置环增益是决定对指令位置跟随性的参数。
与工件表面的优劣有密切关系,仅在驱动器工作在位置方式时有效,当伺服电机停止运行时,增加位置环比例增益,能提高伺服电机的刚性,即锁机力度。
伺服系统的响应性取决于位置环增益,提高位置环增益,位置环响应和切屑精度都会改善,同时减少调整时间和循环时间,但位置环增益又受限于速度环特性和机械特性。
为了提高响应性,如果仅提高位置环增益,作为伺服系统的整体的响应,容易产生震动,所以请一边注意响应性一边提高速度环增益。
特点:位置环增益提高,响应性越高,定位时间越短。
过大会引起震动和超调位置环增益调整原则:在保证位置环系统稳定工作,位置不超差(过冲)的前提下,增大位置环的增益,以减小位置滞后量。
简单的方法,提高位置环增益直至过冲,然后再降低位置环增益,即为刚度较好的位置环增益速度环比例增益、速度积分时间常数.速度环比例增益、速度积分时间常数仅对电机在运行时(有速度)起作用。
速度环比例增益的大小,影响电机速度的响应快慢,为了缩短调整时间,需要提高速度环增益,控制超程或行程不足。
速度环积分时间常数的大小,影响伺服电电机稳态速度误差的大小及速度环系统的稳定性。
当伺服电机带上实际负荷时,由于实际负载转矩和负载惯量与缺省参数值设置时并不相符,速度环的带宽会变窄,如果此时的速度环带宽满足需求,没有发生电机速度爬行或振荡等现象,可以不调整速度环的比例增益及积分时间常数。
如果实际负荷使电机工作不稳定,发生爬行或振荡现象,或者现有的速度环带宽不理想,则需要对速度环的比例增益、积分时间常数进行调整。
速度环增益和位置环增益

速度环增益和位置环增益
1、速度环增益:确定速度环响应性的参数。
由于速度环的响应性较低时会成为外侧位置环的延迟要素,因此会发生超调或者速度指令发生振动。
为此,在机械系统不发生振动的范围内,设定值越大,伺服系统越稳定,响应性越好。
2、位置环增益:伺服单元位置环的响应性由位置环增益决定。
位置环增益的设定越高,则响应性越高,定位时间越短。
一般来说,不能将位置环增益提高到超出机械系统固有振动数的范围。
位置环增益,控制电机的定位精度。
因此,要将位置环增益设定为较大值,需提高机器刚性并增大机器的固有振动数。
速度环积分时间常数:当增益过大,电机发生振动时,可以调节此参数,减少振动。
个人认为积分能消除静差,但在动态运行过程中却是一种不稳定源。
其影响跟负载大小成比例增长。
把积分比作小信号干扰源的话,负载可看做一个放大器,其放大倍数跟负载惯性成正比。
积分只有在低速(接近零速)时作用较明显,速度较大时其可能导致一些不稳定。
增益数值要调整适当太小会影响机床的动态精度还定位精度。
太大会造成电机异常响声。
在机床正常运转后最好对各个轴进行自动优化,水平高的话可以进行手动优化,这样效果更好。
速度环、位置环增益作用

一文让你了解伺服驱动系统增益的作用以及调整的原则伺服是由3个反馈系统构成:位置环、速度环、电流环,越是内侧的环,越需要提高其响应性,不遵守该原则,则会产生偏差和震动。
由于电流环是最内侧的环,以确保了其充分的响应性,所以我们只需要调整位置环和速度环即可。
调整的主要参数是:位置环增益、速度环增益、速度积分时间常数。
位置环增益是决定对指令位置跟随性的参数。
与工件表面的优劣有密切关系,仅在驱动器工作在位置方式时有效,当伺服电机停止运行时,增加位置环比例增益,能提高伺服电机的刚性,即锁机力度。
伺服系统的响应性取决于位置环增益,提高位置环增益,位置环响应和切屑精度都会改善,同时减少调整时间和循环时间,但位置环增益又受限于速度环特性和机械特性。
为了提高响应性,如果仅提高位置环增益,作为伺服系统的整体的响应,容易产生震动,所以请一边注意响应性一边提高速度环增益。
特点:位置环增益提高,响应性越高,定位时间越短。
过大会引起震动和超调位置环增益调整原则:在保证位置环系统稳定工作,位置不超差(过冲)的前提下,增大位置环的增益,以减小位置滞后量。
简单的方法,提高位置环增益直至过冲,然后再降低位置环增益,即为刚度较好的位置环增益速度环比例增益、速度积分时间常数.速度环比例增益、速度积分时间常数仅对电机在运行时(有速度)起作用。
速度环比例增益的大小,影响电机速度的响应快慢,为了缩短调整时间,需要提高速度环增益,控制超程或行程不足。
速度环积分时间常数的大小,影响伺服电电机稳态速度误差的大小及速度环系统的稳定性。
当伺服电机带上实际负荷时,由于实际负载转矩和负载惯量与缺省参数值设置时并不相符,速度环的带宽会变窄,如果此时的速度环带宽满足需求,没有发生电机速度爬行或振荡等现象,可以不调整速度环的比例增益及积分时间常数。
如果实际负荷使电机工作不稳定,发生爬行或振荡现象,或者现有的速度环带宽不理想,则需要对速度环的比例增益、积分时间常数进行调整。
TRIO位置环PID调节
1:准备在调节位置环之前,一定首先调节伺服驱动器上速度环PID参数。
本篇文章是在以下假设条件下完成的:速度环响应特性良好,电机双向都有一段安全运动距离。
在调节位置环时,为了使增益参数准确,需要在带实际负载的情况下进行调节。
下面是用来调节参数的程序,在控制器内执行。
这段程序让电机在正负八分之一圈内来回旋转。
' Intialise the axis for P Loop tuningBASE(0)UNITS=1DEFPOS(0)WAIT UNTIL OFFPOS=0counts_per_rev=4000' set speed to 3000 rpmSPEED=counts_per_rev*3000/60ACCEL=SPEED*1000DECEL=ACCELFE_LIMIT=counts_per_rev/2SERVO=ONWDOG=ONstepsize=INT(counts_per_rev/8)WHILE TRUETRIGGERWA(20)MOVE(stepsize)WA(500)MOVE(-stepsize)WA(480)WEND如果机械结果决定只能向一个方向运动。
程序修改如下:stepsize=INT(counts_per_rev/8)WHILE TRUETRIGGERWA(20)MOVE(stepsize)WA(480)DEFPOS(0)WEND在运行程序之前,确定该轴当前运动状态为IDLE。
打开轴参数和示波器。
设置示波器观测参数为该轴的MPOS和DPOS,横轴时间参数为20msec。
点击option,设置每格采样点数为10或20.设置示波器为程序触发。
2:调节P参数安全起见,P参数先给一个比较小的值,编码器如果是1000到1024线,最好从0.5调起,其他增益参数都设置为0运行程序,并触发示波器,响应曲线应该如下图所示:接下来一点一点的,小心的增加P参数,直到曲线显示如下图:如果曲线如下图所示,证明P参数过大了,此是应该适当减小。
位置环增益调整

位置环增益调整1:准备在调节位置环之前,⼀定⾸先调节伺服驱动器上速度环PID参数。
本篇⽂章是在以下假设条件下完成的:速度环响应特性良好,电机双向都有⼀段安全运动距离。
在调节位置环时,为了使增益参数准确,需要在带实际负载的情况下进⾏调节。
下⾯是⽤来调节参数的程序,在控制器内执⾏。
这段程序让电机在正负⼋分之⼀圈内来回旋转。
' Intialise the axis for P Loop tuningBASE(0)UNITS=1DEFPOS(0)WAIT UNTIL OFFPOS=0counts_per_rev=4000' set speed to 3000 rpmSPEED=counts_per_rev*3000/60ACCEL=SPEED*1000DECEL=ACCELFE_LIMIT=counts_per_rev/2SERVO=ONWDOG=ONstepsize=INT(counts_per_rev/8)WHILE TRUETRIGGERWA(20)MOVE(stepsize)WA(500)MOVE(-stepsize)WA(480)WEND如果机械结果决定只能向⼀个⽅向运动。
程序修改如下:stepsize=INT(counts_per_rev/8)WHILE TRUETRIGGERWA(20)MOVE(stepsize)WA(480)DEFPOS(0)WEND在运⾏程序之前,确定该轴当前运动状态为IDLE。
打开轴参数和⽰波器。
设置⽰波器观测参数为该轴的MPOS和DPOS,横轴时间参数为20msec。
点击option,设置每格采样点数为10或20.设置⽰波器为程序触发。
2:调节P参数安全起见,P参数先给⼀个⽐较⼩的值,编码器如果是1000到1024线,最好从0.5调起,其他增益参数都设置为0运⾏程序,并触发⽰波器,响应曲线应该如下图所⽰:接下来⼀点⼀点的,⼩⼼的增加P参数,直到曲线显⽰如下图:如果曲线如下图所⽰,证明P参数过⼤了,此是应该适当减⼩。
伺服电机三环控制系统调节方法

伺服电机三环控制系统调节方法随着工业自动化程度的不断提高,伺服控制技术、电力电子技术和微电子技术的快速发展,伺服运动与控制技术也在不断走向成熟,电机运动控制平台作为一种高性能的测试方式已经被广泛应用,人们对伺服性能的要求也在不断提高。
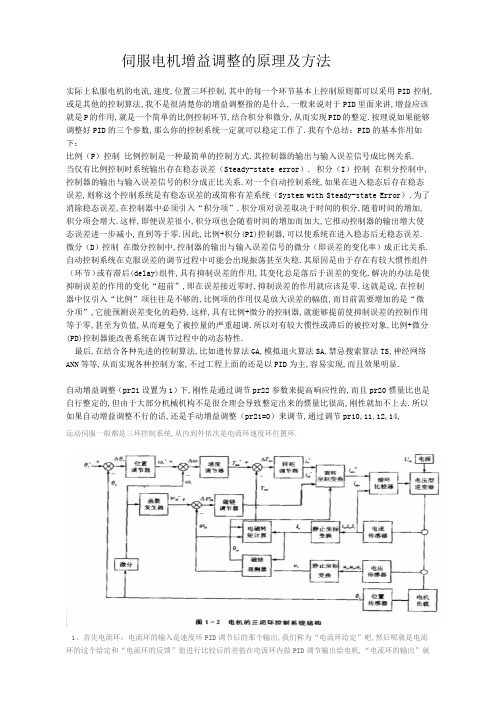
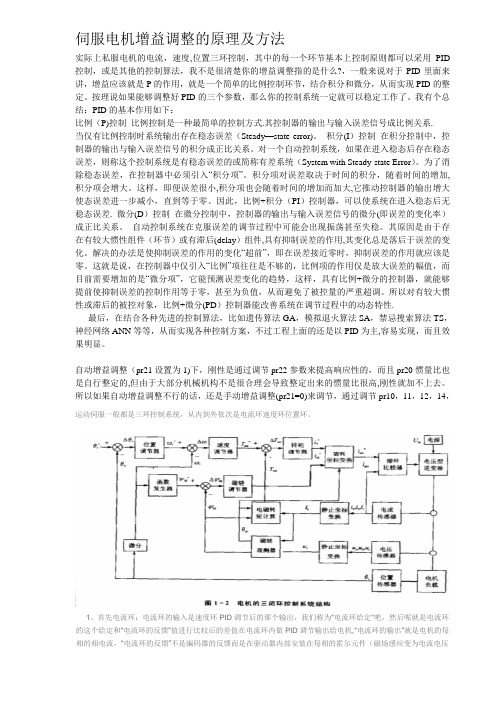
一、三环控制原理1、首先是电流环,此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行PID调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。
2、第二环是速度环,通过检测的伺服电机编码器的信号来进行负反馈 PID 调节,它的环内 PID 输出直接就是电流环的设定,所以速度环控制时就包合了速皮环和电流环,换句话说任何棋式都必须使用电流环,电流环是控制的跟本,在速度和位置控制的同时系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制。
3、第三环是位置环,它是最外环,可认在驱动器和伺服电机编码器间构建也可以在外部控制器和电机编码器或最终负载间构建,要根据实际情况来定。
由于位置控制环内部输出就是速度环的设定,位置控制模式下系统进行了所有 3 个环的运算,此时的系统运算量最大,动态响应速度也最慢。
图 1.1二、影响控制的因素1、速度环主要进行PI(比例和积分),比例就是增益,所以我们要对速度增益和速度积分时间常数进行合适的调节才能达到理想效果。
2、位置环主要进行P(比例)调节。
对此我们只要设定位置环的比例增益就好了。
当进行位置模式需要调节位置环时,最好先调节速度环,位置环、速度环的参数调节没有什么固定的数值,要根据外部负载的机械传动连接方式、负载的运动方式、负载惯量、对速度、加速度要求以及电机本身的转子惯量和输出惯量等等很多条件来决定,调节的简单方法是在根据外部负载的情况进行大体经验的范围内将增益参数从小往大调,积分时间常数从大往小调,以不出现震动超调的稳态值为最佳值进行设定。
发那科伺服调整系列教程

发那科伺服调整系列教程|伺服功能手动调整01按键操作及界面显示我们可以借助伺服调整画面对位置环、速度环增益进行调整,观察监视画面可帮助我们了解电机的工作状态。
注意:手动调整前一般先,进行一键设定,具体方法关注我们加工中心维修:sz-sdifu,下期将有详细讲解。
02 计算速度增益例:伺服电机ais8/4000的惯量:0.0012Kgm2负载惯量: 0.0020Kgm2设定值是假定电机与机床处于刚性联结(完全连接)的状态。
实际机床因刚性、摩擦、间隙等因素影响,往往与计算值有出入。
电机不带负载时设定100。
手动调整速度增益先设定速度增益为100(参数2021=0),每次增加100(或50),具体要根据电机大小和负载决定。
直到电机出现振动。
此时停止增大增益。
一般情况下,设定值为此时设定值的70%。
03调整位置环增益调整位置环增益以一定的速度驱动机床移动,观察伺服调整画面右侧的“位置环增益”,确认位置环增益显示数值是否正确。
确认画面显示的位置环增益,一般情况下应该和参数1825设定值一致。
进行插补的各个伺服轴位置环增益必须设定一致,只做定位控制的伺服轴位置环增益可以不同。
位置环增益手动调整对于位置环增益,直接影响工件的精度,半闭环建议设定为5000,全闭环推荐值3000。
如果机床不振动可参照次数值设定,如有振动可适当减小。
04测定电机的负载电流测定电机的负载电流伺服电机的实际电流,显示在伺服调整画面的右下方,可用来测定电机在轴移动和停止时的电流值。
●以一定速度驱动轴移动,测定实际电流。
λ●在以一定速度移动或停止时,负载电流一般不超过100%,当负载电流超过100%时,必须按照伺服电机规格说明书中规定的过载断续运行时间运行。
λ●停止时电流显示是实际电流的1~0.86倍。
λ●显示值是额定电流的百分比。
05速度环的调整快速运行,主要考虑冲击,时间常数设定的过小,则冲击太大;时间常数设定的过大,加速太慢,效率又过低。
堆垛机变频器位置环和速度环参数调节方法

130物流技术与应用/2020.01权威AUTHORITATIVE FORUM 参数项目默认参数调整后参数位置环比例增益(1000/min)0.080.05位置环积分时间(ms)2035速度环比例增益系数85速度环积分时间(ms)300350运行时间(min)默认变频器参数取货量变频器参数调整后取货量30min1116摘 要:自动化立体仓库因其高效、便捷被广泛地应用到现代物流业中,而堆垛机作为核心设备,其电机变频器的位置环和速度环设定是否合理,直接影响着堆垛机的运行效率。
通过对电机变频器速度环比例系数和积分时间的合理调节,能够使电机快速响应且平稳运行;从而使堆垛机能够精确、快速地定位。
本文以新能源立库中使用的某型号堆垛机为研究对象,分析电机变频器速度环和位置环参数确定的方法。
关键词:自动化立体仓库、堆垛机、位置环、速度环堆垛机变频器位置环和速度环参数调节方法文/白成英 王 猛 张铈岱堆垛机水平轴和起升轴由旋转编码器和外部位移编码器构成速度环和位置环。
通过对堆垛机的研究和工业现场的测试,影响堆垛机运行的主要参数有位置环比例增益、位置环积分时间、速度环增益、速度环积分时间等。
提高位置环增益,位置环响应会变快。
在保证位置环系统稳定、位置不超调(过冲)的前提下,将增大位置环的增益,以减小位置滞后量,但是过大会降低定位精度,过小则会响应慢,两者都会影响堆垛机运行效率;速度环增益决定电机加减速度的响应,为了缩短定位时间,需要提高速度环增益。
但是,太大会使电机抖动,太小又会使电机加速度过小。
速度环积分时间会影响电机稳态速度误差及速度环系统的稳定性,所以通过研究和测试,使堆垛机快速响应且精确定位。
一、位置环系数和速度环系数1.位置环系数的确定 在实际的工业现场 ,发现多数堆垛机运行效率总是达不到设计目标。
通过研究发现很多堆垛机定位时间长,而有些设备则在目标位置过冲,往复较长时间来定位。
这就是典型的位置环比例系数和积分时间设置不合理造成的。
伺服驱动器参数设置方法
伺服驱动器参数设置方法(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
1.位置比例增益:设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
2.位置前馈增益:设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%3.速度比例增益:设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
4.速度积分时间常数:设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
5.速度反馈滤波因子:设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
伺服电机增益调整的原理及方法
伺服电机增益调整的原理及方法实际上私服电机的电流,速度,位置三环控制,其中的每一个环节基本上控制原则都可以采用PID控制,或是其他的控制算法,我不是很清楚你的增益调整指的是什么,一般来说对于PID里面来讲,增益应该就是P的作用,就是一个简单的比例控制环节,结合积分和微分,从而实现PID的整定.按理说如果能够调整好PID的三个参数,那么你的控制系统一定就可以稳定工作了.我有个总结:PID的基本作用如下:比例(P)控制比例控制是一种最简单的控制方式.其控制器的输出与输入误差信号成比例关系.当仅有比例控制时系统输出存在稳态误差(Steady-state error). 积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系.对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error).为了消除稳态误差,在控制器中必须引入“积分项”.积分项对误差取决于时间的积分,随着时间的增加,积分项会增大.这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使态误差进一步减小,直到等于零.因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差. 微分(D)控制在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系. 自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳.其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化.解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零.这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调.所以对有较大惯性或滞后的被控对象,比例+微分(PD)控制器能改善系统在调节过程中的动态特性.最后,在结合各种先进的控制算法,比如遗传算法GA,模拟退火算法SA,禁忌搜索算法TS,神经网络ANN等等,从而实现各种控制方案,不过工程上面的还是以PID为主,容易实现,而且效果明显.自动增益调整(pr21设置为1)下,刚性是通过调节pr22参数来提高响应性的,而且pr20惯量比也是自行整定的,但由于大部分机械机构不是很合理会导致整定出来的惯量比很高,刚性就加不上去.所以如果自动增益调整不行的话,还是手动增益调整(pr21=0)来调节,通过调节pr10,11,12,14,运动伺服一般都是三环控制系统,从内到外依次是电流环速度环位置环.1、首先电流环:电流环的输入是速度环PID调节后的那个输出,我们称为“电流环给定”吧,然后呢就是电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的.2、速度环:速度环的输入就是位置环PID调节后的输出以及位置设定的前馈值,我们称为“速度设定”,这个“速度设定”和“速度环反馈”值进行比较后的差值在速度环做PID调节(主要是比例增益和积分处理)后输出就是上面讲到的“电流环的给定”.速度环的反馈来自于编码器的反馈后的值经过“速度运算器”得到的.3、位置环:位置环的输入就是外部的脉冲(通常情况下,直接写数据到驱动器地址的伺服例外),外部的脉冲经过平滑滤波处理和电子齿轮计算后作为“位置环的设定”,设定和来自编码器反馈的脉冲信号经过偏差计数器的计算后的数值在经过位置环的PID调节(比例增益调节,无积分微分环节)后输出和位置给定的前馈信号的合值就构成了上面讲的速度环的给定.位置环的反馈也来自于编码器.编码器安装于伺服电机尾部,它和电流环没有任何联系,他采样来自于电机的转动而不是电机电流,和电流环的输入、输出、反馈没有任何联系.而电流环是在驱动器内部形成的,即使没有电机,只要在每相上安装模拟负载(例如电灯泡)电流环就能形成反馈工作.谈谈PID各自对差值调节对系统的影响:1、单独的P(比例)就是将差值进行成比例的运算,它的显着特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差,残差具体值您可以通过比例关系计算出...增加比例将会有效减小残差并增加系统响应,但容易导致系统激烈震荡甚至不稳定...2、单独的I(积分)就是使调节器的输出信号的变化速度与差值信号成正比,大家不难理解,如果差值大,则积分环节的变化速度大,这个环节的正比常数的比例倒数我们在伺服系统里通常叫它为积分时间常数,积分时间常数越小意味着系统的变化速度越快,所以同样如果增大积分速度(也就是减小积分时间常数)将会降低控制系统的稳定程度,直到最后出现发散的震荡过程,...这个环节最大的好处就是被调量最后是没有残差的...3、PI(比例积分)就是综合P和I的优点,利用P调节快速抵消干扰的影响,同时利用I调节消除残差...4、单独的D(微分)就是根据差值的方向和大小进行调节的,调节器的输出与差值对于时间的导数成正比,微分环节只能起到辅助的调节作用,它可以与其他调节结合成PD和PID调节...它的好处是可以根据被调节量(差值)的变化速度来进行调节,而不要等到出现了很大的偏差后才开始动作,其实就是赋予了调节器以某种程度上的预见性,可以增加系统对微小变化的响应特性...伺服的电流环的PID常数一般都是在驱动器内部设定好的,操作使用者不需要更改...速度环主要进行PI(比例和积分),比例就是增益,所以我们要对速度增益和速度积分时间常数进行合适的调节才能达到理想效果...位置环主要进行P(比例)调节...对此我们只要设定位置环的比例增益就好了...位置环、速度环的参数调节没有什么固定的数值,要根据外部负载的机械传动连接方式、负载的运动方式、负载惯量、对速度、加速度要求以及电机本身的转子惯量和输出惯量等等很多条件来决定,调节的简单方法是在根据外部负载的情况进行大体经验的范围内将增益参数从小往大调,积分时间常数从大往小调,以不出现震动超调的稳态值为最佳值进行设定...当进行位置模式需要调节位置环时,最好先调节速度环(此时位置环的比例增益设定在经验值的最小值),调节速度环稳定后,在调节位置环增益,适量逐步增加,位置环的响应最好比速度环慢一点,不然也容易出现速度震荡.一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式 .1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为:如果电机轴负载低于时电机正转,外部负载等于时电机不转,大于时电机反转(通常在有重力负载情况下产生).可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现.应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变.2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值.由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置.3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID 控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用.位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加整个系统的定位精度.4、谈谈3环,伺服电机一般为三个环控制,所谓三环就是3个闭环负反馈PID调节系统.最内的PID环就是电流环,此环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行PID调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快.第2环是速度环,通过检测的电机编码器的信号来进行负反馈PID调节,它的环内PID输出直接就是电流环的设定,所以速度环控制时就包含了速度环和电流环,换句话说任何模式都必须使用电流环,电流环是控制的根本,在速度和位置控制的同时系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制.第3环是位置环,它是最外环,可以在驱动器和电机编码器间构建也可以在外部控制器和电机编码器或最终负载间构建,要根据实际情况来定.由于位置控制环内部输出就是速度环的设定,位置控制模式下系统进行了所有3个环的运算,此时的系统运算量最大,动态响应速度也最慢.。
Help7_位置环

测量工具•1. IC 卡•2. 电脑•3. RJ912•4. Hi-coder•5. SH21总线•6. RS232传输线测量工具1234伺服调整位置环增益PGN的设定(1)位置环增益(PGN sv003)是决定对指令位置跟随性的参数,与工件表面的优劣有密切关系。
提高PGN时,位置环响应和切削精度都会改善,同时减少调整和循环时间。
PGN受限于速度环特性和机械特性,设定不当时,会产生过冲(overshooting)。
PGN设定时各轴必须保持一致,以最低的那个PGN值来设定。
PGN测定一般在高速高精度模式下进行,设好后再在G64(切削模式)下测试,如有问题,降低PGN。
一般情况下,在高速高精度下PGN没问题,切削模式下也没问题,因为高速高精度模式相对切削模式更容易发生振动。
位置环增益PGN 的设定(2)伺服调整SHG (Smooth High-Gain)控制使用前馈进给控制,容易诱发机械系统的振动。
结合伺服的SHG 控制可以更稳定地补偿伺服系统位置环的延迟,可提高位置环的增益,缩短整定时间以及提高精度。
特征1.在SHG 控制条件下,即使PGN1 设定值与以往相同,也能使位置环增益增大2倍。
2. SHG 控制与以往的位置控制相比加减速响应更平稳。
3 .SHG 控制能够提高轮廓控制时的精度。
SHG 控制时与PGN1 一起,按照下式的倍率设定PGN2,SHGC 。
SHG 控制时,即使PGN1 的设定值相同,由于实际的位置环增益变大,故速度环需要足够的响应。
速度环的响应较低时,在加减速时将会发生振动和过冲。
发生机械共振而减少速度环增益时,请减少位置环增益。
6:38:1SHGC :PGN2:PGN1=位置环增益PGN 的设定(2)设定调整用的初始参数:sv061=1,sv062=13,sv063=0,sv064=0。
根据下表,从23SHG 开始,逐级改变参数,将PGN 增加得尽可能高一些。
如果可以设定33SHG 以上,则认为是精密机床。
伺服电机增益调整的原理及方法
伺服电机增益调整的原理及方法实际上私服电机的电流,速度,位置三环控制,其中的每一个环节基本上控制原则都可以采用PID 控制,或是其他的控制算法,我不是很清楚你的增益调整指的是什么?,一般来说对于PID里面来讲,增益应该就是P的作用,就是一个简单的比例控制环节,结合积分和微分,从而实现PID的整定。
按理说如果能够调整好PID的三个参数,那么你的控制系统一定就可以稳定工作了。
我有个总结:PID的基本作用如下:比例(P)控制比例控制是一种最简单的控制方式.其控制器的输出与输入误差信号成比例关系.当仅有比例控制时系统输出存在稳态误差(Steady—state error)。
积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
为了消除稳态误差,在控制器中必须引入“积分项”。
积分项对误差取决于时间的积分,随着时间的增加,积分项会增大。
这样,即便误差很小,积分项也会随着时间的增加而加大,它推动控制器的输出增大使态误差进一步减小,直到等于零。
因此,比例+积分(PI)控制器,可以使系统在进入稳态后无稳态误差. 微分(D)控制在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。
自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳。
其原因是由于存在有较大惯性组件(环节)或有滞后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。
解决的办法是使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零。
这就是说,在控制器中仅引入“比例”项往往是不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就能够提前使抑制误差的控制作用等于零,甚至为负值,从而避免了被控量的严重超调。
安川伺服驱动器增益设置方法
② 模式开关 模式开关在过于降低界限值后受摩擦的影响,可能会在P控制切换到P-I控制之前 在积存有位置偏差的状态下停止,因此最好能控制使用。
YASKAWA
5.伺服调整的方法 其他(1)
5‐2.关于手动调整 5-2-3.为抑制由惯性力引起的装置摇摆的手动调整
装置的移动量 =伺服的移动量
装置
装置比伺服更大幅度 的摇摆
装置几乎不动
伺服
慢 动作
缓慢动作 装置和伺服一同 动作
装置的固有振动数 反共振频率
伺服的机械共振 共振频率
快
YASKAWA
3.关于装置(3)
3‐1-1.装置的固有振动数,反共振频率
若动作变快,装置因固有振动数而变得摇摆不定。 在即将要发生摇摆动作的时候让伺服停止,有时伺服虽到达停止位置,但此时弹簧仍弯曲。 直至此弯曲的弹簧变直之前装置都是边摇边停的。此时伺服只受到制止装置摇动的反作用力。
指令更新周期缓指令更新周期缓慢指令呈阶梯状慢指令呈阶梯状位置环的响应性良好追随指令产生振位置环的响应性良好追随指令产生振速度分辨率低速度分辨率低指令指令不平滑不平滑位置环的响应性良好追随指令产生位置环的响应性良好追随指令产生振动振动速度速度分辨率分辨率实际的指令实际的指令理想的指令理想的指令实际的指令实际的指令理想的指令理想的指令指令更新周期指令更新周期转矩转矩转矩转矩
・追踪性提高
<缺点>
・产生机械共振
・由于延迟要素和干扰而变得不稳定控制体自身产生振动
具有代表性的延迟要素
速度比例增益时:转矩滤波器全部
位置比例增益时:速度比例增益
重要
提高增益时会产生2种振动
松下伺服电机手动调整增益的方法
-40
最好是声音、振动没有发生
也对转矩起振的先兆现象进
行确认。
-60
-80
内控资料
位置环增益的设定 与定位的迟滞有关�一般在速度增益的一半到�倍的范围内进行设定。
目标�
高刚性的机械
位置环增益设定 � 速度环增益×2
低刚性的机械
位置环增益设定 � 速度环增益×1�2
�如果负载的惯量比设定正确的情况�
内控资料
MINAS A系列
手动调整增益的方法
上海会通 研发服务部
A.基本調整
概要
伺服的基本调整比较简单。 对照右图�首先在不起振的情况下增大速 度环增益。 然后�设定不起振的位置环增益�必要时 设定积分时间常数�以缩短定位时间。 微调整�分别对位置环增益与速度积分时 间常数进行微调整。
内控资料
速度环增益的设定 位置环增益的设定 速度积分时间常数的设定
1000
太小的话摇摆不定
指令速度 KV=5 実速 KV=10実速 KV=50実速 KV=100実速 KV=250実速
接近指令的形状�但不 要提高太大
太大的时候引起了声 音、振动
500
0 1
-500
17 33 49 65 81 97 113 129 145 161 177 193 209 225 241 257 273 289 305 321 337 353 369 385 401 417 433 449 465 481 497
ms
-1000
速度环增益(speed loop gain)的效果�转矩(torque)观测
80
%
60
40
内控资料
KV=50��� KV=100��� KV=150���
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1:准备
在调节位置环之前,一定首先调节伺服驱动器上速度环PID参数。
本篇文章是在以下假设条件下完成的:速度环响应特性良好,电机双向都有一段安全运动距离。
在调节位置环时,为了使增益参数准确,需要在带实际负载的情况下进行调节。
下面是用来调节参数的程序,在控制器内执行。
这段程序让电机在正负八分之一圈内来回旋转。
' Intialise the axis for P Loop tuning
BASE(0)
UNITS=1
DEFPOS(0)
WAIT UNTIL OFFPOS=0
counts_per_rev=4000
' set speed to 3000 rpm
SPEED=counts_per_rev*3000/60
ACCEL=SPEED*1000
DECEL=ACCEL
FE_LIMIT=counts_per_rev/2
SERVO=ON
WDOG=ON
stepsize=INT(counts_per_rev/8)
WHILE TRUE
TRIGGER
WA(20)
MOVE(stepsize)
WA(500)
MOVE(-stepsize)
WA(480)
WEND
如果机械结果决定只能向一个方向运动。
程序修改如下:
stepsize=INT(counts_per_rev/8)
WHILE TRUE
TRIGGER
WA(20)
MOVE(stepsize)
WA(480)
DEFPOS(0)
WEND
在运行程序之前,确定该轴当前运动状态为IDLE。
打开轴参数和示波器。
设置示波器观测参数为该轴的MPOS和DPOS,横轴时间参数为20msec。
点击option,设置每格采样点数为10或20.设置示波器为程序触发。
2:调节P参数
安全起见,P参数先给一个比较小的值,编码器如果是1000到1024线,最好从0.5调起,其他增益参数都设置为0
运行程序,并触发示波器,响应曲线应该如下图所示:
接下来一点一点的,小心的增加P参数,直到曲线显示如下图:
如果曲线如下图所示,证明P参数过大了,此是应该适当减小。
一般系统只用P参数就可以了,如果需要进一步减小跟随误差,可以用以下两种方法:1),用P参数和VFF参数
2),用P,I,D,三个参数
3,设置VFF参数
设置VFF方法比较简单,有计算法和尝试法两种。
在用前面讲过的方法设好P参数后,让电机在额定速度的30%到60%之间常速运动,逐渐加VFF参数,直到跟差减小到最小范围。
设定好后,这个参数在其他速度下也是正确的。
如果计算,按一下公式,
12位DC(dac_scale=16):
VFF_GAIN = (60 / motor_rpm_10V) * (1000 / encoder_pulses_per_rev) * 2048
16位DC:
VFF_GAIN = (60 / motor_rpm_10V) * (1000 / encoder_pulses_per_rev) * 32768
4:设置I和D参数:
在设置I参数是,应加倍小心,以为I值一般很小就够了,一般可以从0.001开始调起。
调
到如下图所显示的状态:超调相对只有P参数的时候要大,而且有多次震荡后才平稳。
状态:超调明显减小,运动很快进入稳定状态。
OV参数和D参数起的作用大致相同,一般可以不设,如果要设的话,应为负值。
附录:
下面是手册上给出的各个参数的含义:
Proportional Gain
Description The proportional gain creates an output voltage, Op that is proportional to the following error E.
Op = Kp x E
Axis parameter is called P_GAIN
Syntax: P_GAIN=0.8
Note: All practical systems use proportional gain, many use this gain parameter alone.
Integral gain
Description The Integral gain creates an output Oi that is proportional to the sum of the errors that have occurred during the system operation.
Oi=Ki x SE
Integral gain can cause overshoot and so is usually used only on systems working
at constant speed or with a slow acceleration.
Axis parameter is called I_GAIN
Syntax: I_GAIN=0.0125
Derivative gain
Description This produces an output Od that is proportional to the change in the following error and speeds up the response to changes in error whilst maintaining the
same relative stability.
Od = Kd x DE
This gain may create a smoother response. High values may lead to oscillation.
Axis parameter is called D_GAIN
Syntax: D_GAIN=5
Output Velocity Gain
Description This increases the system damping, creating an output that is proportional to the change in measured position.
Oov = Kov x DPm.
This parameter can be useful for smoothing motions but will generate high following errors. Note that a NEGATIVE OV_GAIN is required for damping.
Axis parameter is called OV_GAIN
Syntax: OV_GAIN=-5
Velocity Feed Forward Gain
Description As movement is created by following errors at high speed the following error can be quite appreciable. To overcome this the Velocity Feed Forward creates an output proportional to the change in demand position so creating movement without
the need for a following error.
Ov = Kvff x DPd
Axis parameter is called VFF_GAIN
Syntax: VFF_GAIN=10
The VFF_GAIN parameter can be set by minimising the following error at a constant machine speed AFTER the other gains have been set.。