松下伺服增益参数调整说明
小型单节双臂松下伺服调整(会通20130617)
小型单节双臂松下伺服电机调整一、电机增益调整方法:首先设定基本参数,Pr005=1、Pr006=1、Pr007=0、Pr0012=1(SX和SZ轴此参数不用改)、Pr016=1。
基本参数设定完毕后,然后进行自动增益调整:设置Pr0.02=2(根据不同机械设定,机械手一般设为2,Pr115自动设定为10,使用两档增益切换,运行时使用第二增益,停止时使用第一增益)。
在自动增益调整状态下,电机转速达到200R/M时,Pr004惯量比为自动测定。
调整Pr0.03的值,当提高到某一数值时,电机会出现震动或机械异常响声,说明有共振点出现,需先去先除共振点。
(机械手不需要太高的响应性,刚性设定不用太高)。
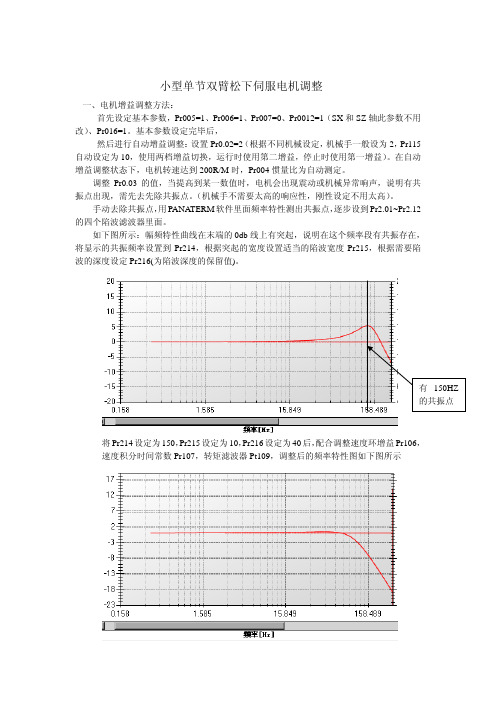
手动去除共振点,用PANATERM软件里面频率特性测出共振点,逐步设到Pr2.01~Pr2.12的四个陷波滤波器里面。
如下图所示:幅频特性曲线在末端的0db线上有突起,说明在这个频率段有共振存在,将显示的共振频率设置到Pr214,根据突起的宽度设置适当的陷波宽度Pr215,根据需要陷波的深度设定Pr216(为陷波深度的保留值)。
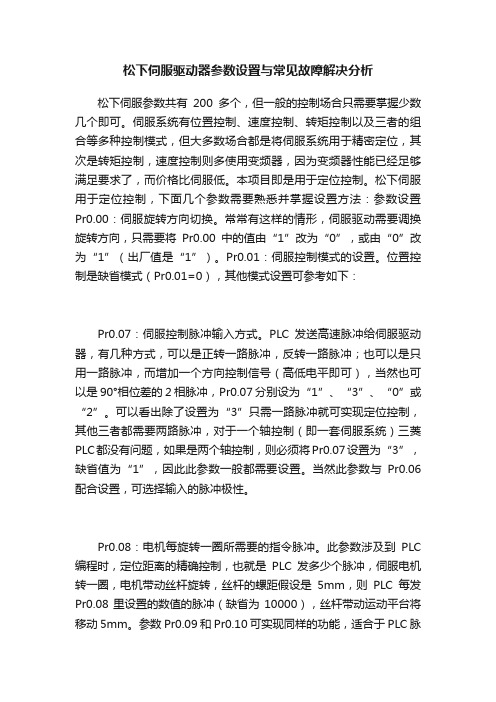
将Pr214设定为150,Pr215设定为10,Pr216设定为40后,配合调整速度环增益Pr106,速度积分时间常数Pr107,转矩滤波器Pt109,调整后的频率特性图如下图所示机器在运行过程中有声音时,可以通过Pr109进行调整,设置范围为Pr109<1/18*Pr101。
二.减振设定:若机械尖端有晃动,则可通过振动抑制功能消除,抓取机械一运行周期内的波形图,用软件测量停止时的力矩波动周期T(ms单位),通过1000/T计算得尖端振动频率,将其设置到Pr214参数内,观察实际效果,并手动上下微调Pr214即可消除尖端晃动。
如下图所示:从上图可看出,在指令停止后转矩仍有一定频率的波动,即由尖端晃动引起的。
通过上述方法计算出振动频率,设定到Pr214,并上下微调此参数,达到实际最好效果为止,若还是不能达到要求,重复上步骤可再次测定振动频率设定到Pr216,最多可去除四个振动频率。
(推荐)松下伺服调试参数

松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)Pr0.01* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制Pr0.02 设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM 中刷新保存。
Pr0.05 指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下伺服调试参数

松下伺服调试参数 Revised by Jack on December 14,2020松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM中刷新保存。
指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量时,=10000 =螺距5mm /脉冲当量=5000 即:=10000/5000=2/1指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下伺服驱动器参数设置与常见故障解决分析
松下伺服驱动器参数设置与常见故障解决分析松下伺服参数共有200多个,但一般的控制场合只需要掌握少数几个即可。
伺服系统有位置控制、速度控制、转矩控制以及三者的组合等多种控制模式,但大多数场合都是将伺服系统用于精密定位,其次是转矩控制,速度控制则多使用变频器,因为变频器性能已经足够满足要求了,而价格比伺服低。
本项目即是用于定位控制。
松下伺服用于定位控制,下面几个参数需要熟悉并掌握设置方法:参数设置Pr0.00:伺服旋转方向切换。
常常有这样的情形,伺服驱动需要调换旋转方向,只需要将Pr0.00中的值由“1”改为“0”,或由“0”改为“1”(出厂值是“1”)。
Pr0.01:伺服控制模式的设置。
位置控制是缺省模式(Pr0.01=0),其他模式设置可参考如下:Pr0.07:伺服控制脉冲输入方式。
PLC发送高速脉冲给伺服驱动器,有几种方式,可以是正转一路脉冲,反转一路脉冲;也可以是只用一路脉冲,而增加一个方向控制信号(高低电平即可),当然也可以是90°相位差的2相脉冲,Pr0.07分别设为“1”、“3”、“0”或“2”。
可以看出除了设置为“3”只需一路脉冲就可实现定位控制,其他三者都需要两路脉冲,对于一个轴控制(即一套伺服系统)三菱PLC都没有问题,如果是两个轴控制,则必须将Pr0.07设置为“3”,缺省值为“1”,因此此参数一般都需要设置。
当然此参数与Pr0.06配合设置,可选择输入的脉冲极性。
Pr0.08:电机每旋转一圈所需要的指令脉冲。
此参数涉及到PLC 编程时,定位距离的精确控制,也就是PLC发多少个脉冲,伺服电机转一圈,电机带动丝杆旋转,丝杆的螺距假设是5mm,则PLC每发Pr0.08里设置的数值的脉冲(缺省为10000),丝杆带动运动平台将移动5mm。
参数Pr0.09和Pr0.10可实现同样的功能,适合于PLC脉冲数和移动距离不能整除的场合,其实掌握了Pr0.08,已经无往而不胜了。
Pr5.04:伺服定位,一般两端装有极限位的行程开关,如果装了,需要设置Pr5.04由“1”设置为“0”,否则行程开关将不起作用。
松下伺服调试参数
松下伺服调试参数 Prepared on 22 November 2020松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM中刷新保存。
指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量时,=10000 =螺距5mm /脉冲当量=5000 即:=10000/5000=2/1指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下驱动器参数设置表

12
PR21
实时自动增益设置
0
13
FR30
第二增益动作设置
1
可以在第一和第.增益间切换
14
PR41
指令脉冲旋转方向设置
0
15
PR42
指令脉冲输入方式
3
指令脉冲+指令方向
16
PR48
指令脉冲分倍频第一分子
10000
17
PR4B
指令脉冲分倍频分母
2000
18
PR4A
指令脉冲分倍频分子倍率
0
19
20
4
PR12
第一速度环儿分时间常数
越小则积分动作越快
16
5
PR13
第一速度检测虑波器
越高则电机噪音越小
0
6
PR14
第一转矩虑波器时间常数
65
7
PR18
第二位置环增益
1073
8
PR19
第二速度环增益
35
9
PR1A
第二速度环儿分时间常数
1000
10
PR1BБайду номын сангаас
第二速度检测虑波器
0
11
PR1C
第二转矩虑波器时间常数
松下驱动器参数设置表
序号
名称
型号
规格
单位
备注
1
伺服驱动器
MADDT1207
200W
个
2
伺服电机
MSMD022P1U
200W
个
3
伺服驱动常用参数调整值
序号
编号pr.
参数名称
设置值
意义
1
PR02
松下伺服几个参数需要熟悉并掌握设置方法
松下伺服几个参数需要熟悉并掌握设置方法松下伺服驱动器是一种广泛应用于工业机器和自动化设备中的驱动设备。
它的性能和功能非常多样化,为了更好地使用和应用松下伺服驱动器,需要熟悉和掌握一些参数设置方法。
以下是几个需要熟悉并掌握设置方法的松下伺服参数:1.速度环参数:松下伺服驱动器的速度环参数用于控制电机的运行速度。
其中包括速度比例增益、速度积分增益和速度偏差限制等参数。
需根据具体应用场景调整这些参数的值,以达到预期的运动控制效果。
在进行速度环参数设置时,首先需要确定期望的速度响应曲线,例如加速时间、匀速时间和减速时间。
然后根据实际测试数据调整速度比例增益和速度积分增益,以使电机在给定的运动过程中能够快速、稳定地达到期望的速度。
2.位置环参数:松下伺服驱动器的位置环参数用于控制电机的位置精度和稳定性。
其中包括位置比例增益、位置积分增益和位置偏差限制等参数。
调整这些参数的值可以改变电机的位置控制性能。
在进行位置环参数设置时,首先需要确定期望的位置控制精度,例如允许的位置偏差范围或静态和动态跟踪误差。
然后根据实际测试数据调整位置比例增益和位置积分增益,以使电机能够在给定的位置控制误差范围内稳定运行。
3.加速度和减速度参数:松下伺服驱动器的加速度和减速度参数用于控制电机的加速和减速过程。
这些参数直接影响电机的动态性能和响应速度。
在进行加速度和减速度参数设置时,需要综合考虑电机和机械系统的能力和特性。
如果加速度设置过大,可能会导致电机无法应对过大的惯性负载;如果减速度设置过小,可能会导致电机在停止过程中过度震荡。
因此,需要根据具体的应用要求和实际测试数据来调整加速度和减速度参数的值。
4.运行模式参数:松下伺服驱动器支持多种运行模式,例如位置控制、速度控制和力矩控制等。
在设置运行模式参数时,需要根据实际需要选择合适的运行模式,并设置相应的参数。
在进行运行模式参数设置时,首先需要确定期望的运动控制方式,例如精确定位、快速定位或轻负载运行等。
松下伺服调试参数
松下伺服调试参数文稿归稿存档编号:[KKUY-KKIO69-OTM243-OLUI129-G00I-FDQS58-松下 A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态 6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和)Pr0.01* 控制方式选择 0 0:位置控制 1:速度控制 2:转矩控制Pr0.02 设定实时自动调整调试设定 0:无效 1:标准 3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定 0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%)=(负载惯量/转子惯量)*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM中刷新保存。
Pr0.05 指令脉冲输入选择 1 0:光电耦合器输入(低速接口) 1:长线驱动器专用输入(高速接口)Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算 1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算 1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按 MODE键,选择EEPROM写入显示模式EE_SEt;②按 SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
松下伺服马达增益调试课件

调试
目录
• 前言 • 伺服马达参数设置方法 • 松下伺服参数自整定调试 • 松下伺服参数手动调试 • 波形仿真和实例演示
前言
前(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达
间接变速装置。伺服马达可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和
当整个系统需要很快的反应时,仅仅确保采用的伺服系统(控制器、伺服驱动器 、电机以及编码器)的快速反应是不够的,还必须要确保其控制的机械系统也具有 较高的刚性,这样才能使得整个系统具有较好的刚性。
一、伺服驱动器参数设
置方法
二、伺服驱动器关键参数的调整原则 • 速度环增益(KVP)
主要用来决定速度环的反应速度。在机械系统不震动的前提下,参数设定的值 愈大,反应速度就会增加。在确保负载惯量比的设定值处于允许范围的条件下, 速度环的增益设置就可以达到设计时允许的数值范围,从而确保速度环的快速反 应。 增大速度环的比例增益,则能降低转速脉动的变化量,提高伺服驱动系统的硬 度,保证系统稳态及瞬态运行时的性能。但是在实际系统中,速度环比例增益不 能过大,否则将引起整个伺服驱动系统振荡。
Ti:积分时间参数[s] Kv:速度环增益 [HZ]
一、伺服驱动器参数设
置方法
• 速度环参数调节与负载惯量的关系
当负载对象的转动惯量与电动机的转动惯量之比增大以及负载的摩擦转矩增大时,
宜增大速度环比例增益和积分时间常数,以满足运行稳定性的要求。当负载对象 的转动惯量与电动机的转动惯量之比减小以及负载的摩擦转矩减小时,宜减小速 度环比例增益和积分时间常数,保证低速运行时的速度控制精度。
• 速度环积分时间常数(KVI)
速度环的积分作用可以减小电机速度的脉动,但积分作用也会延迟伺服驱动器的 反应。速度环积分对速度跟踪位置指令的影响不是很大,但过大的速度环积分时 间会延迟速度环的反应时间。因此,时间常数增加时,驱动器的反应时间变慢, 从而所需的定位时间就愈长。 当负载惯量很大,或者机械系统很可能出现震动时,必须增大速度环积分时间 常数,否则机械系统将很可能出现震动。设置时可参考如下进行:
松下A4系列伺服增益调整

内控文件
MINAS A4系列
目标
业界NO.1的小型化、高性能化及易操作
内控文件
增益调整难吗?
能够简单地调整客户高兴、自己也高兴。大家的幸事!
基本用实时自动调整对应可能。 (并且想充实的情况有理论的知识就好了。)
2
何谓好的控制? ①稳定性
不发生振动及持续性振荡
输出
内控文件
2自由度 控制器 自动 频率调整 振动抑制 滤波器 转矩 控制
负载
马达
滤波器 无效 滤波器频率 滤波器搜集 时间50ms
适应型 振动抑制滤波器 速度
他社比较
松下A4 M社J3 Y社ΣⅢ
对应振动频率范围宽(~1500Hz) 适应动作的快速搜集结束(理论上的)
◎
△
×
22 无此功能
収束短时间 试验动作必要 (50ms) (2~10秒钟声音)
内控文件
使之往复运动。
惯量比自动推定。(Pr.20自动输入) 请确认往复运动几次使推定值稳定。
刚性(Pr.22)慢慢地提高。(4→5→6→…) 调查稳定动作的限界。(从声音和发生振动来判断) 根据Pr.22 的设定值自动设定增益 (Pr.10、11、12、13、14、15)
Kpp、Kvp、Tvi、Vfil、Tfil、Kff
速度応答設定[Hz] 350 300 250 200 150 100 50 0 0 1 2 3 4 5 6 7 8 9 剛性設定
内控文件
开发品(A4) 使用(Pr.21=1~6) 第一增益(停止时) 第二增益(动作时) 位置增益低 ⇔ 位置增益高 速度PI控制 速度P控制 未使用 ・ 因动作位置変化、经年变化
手动设定 对应不可能
松下伺服增益参数调整说明
滤波器 作为由机械共振而引起振动时的对策是◎ 作为由控制不稳定而引起振动时的对策是×
5.关于控制(4)
关于发生振动的结构
发生的振动
重要
提高增益 → 机械共振,控制体自身不稳定的振动
加入滤波器 → 控制不稳定的振动
伺服调整的基本是
①为了加快响应而提高增益
②由于增益的提高而产生了机械共振
③通过加入陷波滤波器;延长转矩滤波器的时间常数来应对
判断? 通过速度、位置偏差确认。想加快整定的场合,通过一边确认位置偏差,一边考虑定位 完成的幅值来调整。
位置环增益(position loop gain)的效果:速度(speed)观测
位置环增益(position loop gain)的效果:位置偏差 (position error)观测
速度积分时间常数的设定
分析频率(FFT) 把握共振特性
矩滤波器、前馈速度,惯量
比等个调整参数,不能更改
。 按照操作手册进行调整时, 需要设定实时自动调整功能
①把握速度环增益的范围 ②把握共振点,根据需要使用
陷波滤波器
为无效。
要求更短的整定时间时
出现共振现象时
如果此流程可 以理解,操作 就没问题了!
机械钢性No.(Pr.22)上升
5.关于控制
若提高增益会引起什么呢?
在伺服调整中,经常使用的增益有速度增益,位置增益。 当在伺服调整中发生问题时,为避免执行错误的对策,必须要了解在提高增益时会引发哪些情况。
<优点> ・响应变快 ・抗干扰增强 ・追踪性提高 <缺点> ・产生机械共振 ・由于延迟和干扰而变得不稳定控制体自身产生振动
具有代表性的延迟要素 速度增益时:全部转矩滤波器 位置增益时:速度增益
松下伺服调试说明
Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
松下伺服马达增益调试

前言 伺服马达应用领域
汽车行业
伺服马达应用的领域十分广泛,基本上只要是 有动力源的,而且对精度有要求的一般都可能 涉及到伺服马达。如机床、印刷设备、包装设 备、纺织设备、激光加工设备、机器人、自动 化生产线等对工艺精度、加工效率和工作可靠 性等要求相对较高的设备。
服装行业
6
前言 常用一些伺服马达
3. 选择完成型号后进入界面点击右上角适合增益进入自动增益调试界面
适合增益按钮
18
二、松下伺服参数自整定调试
4. 设定参数:点击“其他设定”根据实际负载设定一个起始调试参数,点击下一步
其他设定按钮
19
二、松下伺服参数自整定调试
5. 进入驱动模式选择界面,这时需要对马达进行试运行,让马达进行自动动作
举例看图说明一下增益的重要性,如下图所示,当位置增益设置值较低时,实际速 度会比较软和指令速度存在较大的偏差;当速度增益设置值较大时实际速度可以达 到指令速度,但是存在时间的偏差,但要加上前馈的设定,实际速度和指令速度基 本接近重合。极大的降低了运动过程中的误差。
滚珠丝杆马达波形曲线
13
二、松下伺服参数自整定调试
9
一、伺服驱动器参数设置方法
二、伺服驱动器关键参数的调整原则 • 速度环增益(KVP)
主要用来决定速度环的反应速度。在机械系统不震动的前提下,参数设定的值 愈大,反应速度就会增加。在确保负载惯量比的设定值处于允许范围的条件下,速 度环的增益设置就可以达到设计时允许的数值范围,从而确保速度环的快速反应。 增大速度环的比例增益,则能降低转速脉动的变化量,提高伺服驱动系统的硬 度,保证系统稳态及瞬态运行时的性能。但是在实际系统中,速度环比例增益不能 过大,否则将引起整个伺服驱动系统振荡。
松下伺服调试说明

Panasonic松下数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. 松下连接示意图 2. 通电前的检查 3. 通电时的检查 4. 松下伺服驱动器的参数设定 5. 松下伺服驱动器的参数和性能优化调整 1. 松下连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在松下的保修范围!) 2. 通电前的检查 1) 确认松下伺服驱动器和电机插头的连接,相序是否正确: A.中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.中惯量电机MDMA 0.75KW-2.5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U F V I W B 接地 D 刹车电源 G 刹车电源 H C. 中惯量电机MDMA 3KW-5KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U D V E W F 接地 G 刹车电源 A 刹车电源 B 2)确认松下伺服驱动器CN SIG和松下伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认松下伺服驱动器CN I/F和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.松下伺服驱动器的参数设定 1)松下伺服驱动器修改参数的操作方法 A. 接通驱动器电源; B. 按操作面板上的“SET”键; C. 按住“MODE”键,选择参数页面 PR _ 00 ; D. 用上○∧,下○∨按钮,选择你需要修改参数的参数号码 PR _ 42 (例修改42号参数); E. 按“SET”键,显示原来的参数值 00; F. 用左○<,上○∧,下○∨按钮,改变参数值; G. 修改完毕, 按“SET”键确定。
松下伺服调试参数.
松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和Pr0.01* 控制方式选择0 0:位置控制1:速度控制2:转矩控制Pr0.02 设定实时自动调整调试设定0:无效1:标准3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%=(负载惯量/转子惯量*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM 中刷新保存。
Pr0.05 指令脉冲输入选择1 0:光电耦合器输入(低速接口1:长线驱动器专用输入(高速接口Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按MODE键,选择EEPROM写入显示模式EE_SEt;②按SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
Panasonic伺服参数设定说明

P a n a s o n i c伺服参数设定说明Prepared on 24 November 2020Panasonic(MINAS A系列)伺服参数设定说明:注意:齿轮比设错,编码器会无回授,同时控制器发遗失位置命令、严重追随误差警报。
使用面板设定参数的方式:1、接通驱动器电源;2、按set键按钮;3、按住MODE键按钮,到显示为:“PA_ 00”;4、按上↑、或下↓键按钮,来选择需要设定的数号,如选择10号参数,显示为:“PA_ 10”;5、按set键按钮,进入对应参数值,显示为:“ 50”;6、用左←键、上↑键、下↓键,来修改设定数值;7、修改完后,按set键按钮,确认退出;当修改完所有要修改的参数后,要执行选择EEPROM模式写入,8、按MODE键按钮,到显示为:“EE_ SET”;9、按set键按钮,到显示为:“EEP -”;10、按住上↑键按钮约(持续3秒钟),显示转换如下:“EEP -”→“EEP - -”→“- - - - - -”→“START” [→“FINISH”[→“Reset”[→“ERROR”“FINISH”与“Reset”写入完成;“ERROR”写入出错,须重新设定参数,后再写入;显示“Reset”需要关电源,重开电源后,设定参数值生效;常规自动增益调节:1、选择常规自动增益调节模式,初始显示“r 0”;2、按SET键按钮一次,按MODE模式键切换,按钮三次,到显示为“At_no1”;3、按上↑、下↓键来选择机器的刚性,刚性越高越好,但前提条件是机台不抖动;4、按SET键按钮,进入监视器 / 执行模式;显示为:“Atu -”;5、在监视器 / 执行模式上运作:按住上↑键按钮约3秒,直到出现显示“start”,电机开始运转,大约15秒内,电机重复5个周期,包括两圈的正转和反转。
“Atu -”→“Atu - -”→“- - - - - -”→“START” [→“FINISH”[→“ERROR”6、把获得的增益值写入到EEPROM。
松下A6伺服电机说明书Part5
否
是否自动调整?
是 否
指令输入是否可能?
是
实时自动增益 调整
自动调整功能的 解除
使用试运转功能 运转
否
动作O.K.?
是
自动调整功能的 解除
手动增益 调整
动作O.K.?
否
是
调整结束
请与本公司商谈
为了进行适当的调整增益且用户能放心使用,请参照P.6-19「关于增益调整前的保护功能设定」。
5-2
械系摩擦影响的功能,有偏载重补偿与动摩擦补偿两类 摩擦转矩补偿。
P.5-52
整
惯量比在2阶段变化时,可以切换2种类的惯量比。
P.5-54
全闭环控制模式下,可抑制电机与负载扭曲量所引起的振动的功能。 P.5-56
2自由度控制模式可通过独立设定指令响应和伺服刚性,改善响应 性以及扩展位置・速度控制模式的功能。
1. 增益调整
概 要
种 类
功 能 实时自动增益调整
自动 调整
2自由度控制模式 自适应滤波器
手动增益调整(基本)
基本步骤
增益切换功能
机械共振的抑制
手动增益调整(应用)
手动 调整
制振功能 前馈功能
负载变动抑制功能
第3增益切换功能
摩擦转矩补偿 惯量比切换功能 混合振动抑制功能 2自由度控制模式
2段转矩滤波器
1
在 使 用 之 前
说 明 实时推断机械负载特性,自动设定与其结果匹配的增益。
参照
页
P.5-4
2
2自由度控制模式可通过独立设定指令响应和伺服刚性,改善响应
性以及扩展位置・速度控制模式的功能。
P.5-10
准
实际动作状态下,通过从电机速度上表现出来的振动成分推断出共
松下伺服调试参数.
松下A5系列伺服参数一、松下MINAS A5系列伺服驱动器参数设定:用松下MINAS A5系列伺服驱动器,设定以下参数后,机床即可工作。
但是,为优化机床性能,请详细参阅伺服驱动器技术资料。
参数号功能设定值设定值说明Pr5.28* LED初始状态6 通过设置此参数来监测脉冲数的接发是否正确。
在维宏控制系统里面,通过脉冲监测,来检测控制卡发出脉冲是否正确,从而可判断出是否存在电气干扰问题。
(该参数为指令脉冲总和Pr0.01* 控制方式选择0 0:位置控制1:速度控制2:转矩控制Pr0.02 设定实时自动调整调试设定0:无效1:标准3:垂直轴Pr0.03 实时自动调整机器刚性设定调试设定0—31,设定值越高,响应越快,但值太高,容易产生振动。
实时自动增益调整时机器刚性设定。
Pr0.04 惯量比调试设定设置机械负载惯量对电机转子惯量比之比率。
设定值(%=(负载惯量/转子惯量*100。
实时自动增益调整时,此参数可自动估算并每30分钟在EEPROM 中刷新保存。
Pr0.05 指令脉冲输入选择1 0:光电耦合器输入(低速接口1:长线驱动器专用输入(高速接口Pr0.07 指令脉冲输入方式选择 3 设定脉冲指令输入方式为脉冲串加符号,负逻辑。
Pr0.09 第一指令脉冲分倍频分子需计算1~10000 典型值:螺距5mm,编码器分辨率10000,连轴器直拖,脉冲当量0.001mm时,Pr0.09=10000 Pr0.10=螺距5mm /脉冲当量0.001mm=5000 即:Pr0.09/Pr0.10=10000/5000=2/1Pr0.10 指令脉冲分倍频的分母需计算1~10000二、松下驱动器的调节松下伺服器修改参数设定值后,须选择EEPROM 写入模式。
方法如下:①按MODE键,选择EEPROM写入显示模式EE_SEt;②按SET键,显示EEP -;③按住上翻键约3 秒,显示EEP ――到――――――到StArt,参数保存完显示FiniSh.表示参数写入有效,显示rESEt.表示需关断电源,重新通电设定值才能生效;显示Error.表示写入无效,需重新设定参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特别地,位置偏差小的时候结束得快的关系、一般在10~300的范围内进行设定。
目标?
高刚性的机械
30以下
低刚性机械和怕振动的机械 50—300
由于设定的大、小产生的影响? 太小的话,会引起振动,也会影响COIN信号输出。 太大的话、振动会减小,偏差少的场合,整定时间会变长。 作为一阶延时时间常数设为500以上的话,不太大的变化看不到。
速度环增益(Speed loop gain)的效果:速度(speed)观测
速度环增益(speed loop gain)的效果:转矩(torque)观测
位置环增益的设定
与定位的迟滞有关,一般在速度增益的一半到2倍的范围内进行设定。 目标? 高刚性的机械 位置环增益设定= 速度环增益×2 低刚性的机械 位置环增益设定= 速度环增益×1/2 (如果负载的惯量比设定正确的情况) 由于设定的大、小产生的影响? 太小的话,定位时间长。 太大的话,发生振动,也会影响COIN信号输出。
基本调整附加功能
前馈功能
跳过位置环增益,直接输入到速度环增益的比例(%)的设定。 用于想快速定位的场合。目标通常30%程度,最大60%。 根据机械,设为100%也有可能,但位置偏差也有变为减的情况。 设定值很大时,由于偏差变得非常小,有可能为减,有必要注意定位完成信号
转矩滤波器功能
转矩指令的一阶延时低通滤波器。设定单位为0.01ms。一般为300以下。 对抑制机械的振动和噪音有效果。(转矩的紊乱会导致机械的振动与噪音) 设定地过大的话(特别是300以上)因难以控制需注意 截止频率fc=1/(2π×设定値×0.00001) (例)设定値100的情况fc =1/(2π ×100×0.00001)=159Hz 设定目标 高的K—K—音的情况 100程度 低的咕—咕—音的情况 200程度
一.基本参数调节
其实伺服电机我们所说的基本调节就是要确 定下 面几个方面的问题: 控制方式(一共有三种) ●位置控制 ●速度控制 ●转矩控制
1.位置控制的基本参数调节
1.1位置 控制的 基本参数调节
。
2.速度控制的基本参数调节
2.1速度控制的基本参数调节
3.转矩控制的基本参数调节
3.1转矩 控制的 基本参数调
判断? 通过速度、位置偏差确认。想加快整定的场合,通过一边确认位置偏差,一边考虑定位 完成的幅值来调整。
位置环增益(position loop gain)的效果:速度(speed)观测
位置环增益(position loop gain)的效果:位置偏差 (position error)观测
速度积分时间常数的设定
是
结 束
运转 OK?
机械钢性No.(Pr.22)下降
运转 OK?
是
结 束
OK
根据PANATERM频率分析功能
MINAS系列的PANATERM,配置有完美的「频率分析」功能。
分析频率功能,可以测定1KHz范围内的响应特性。此功能强大,不仅对调整起到很大的作用, 而且还可以把握负载状态与特性。 使用方法可根据具体的需要另外学习,在实际操作中,如没有实践经验,感觉也就很难把握。因 此,需要理解下列图表所表示的内容。
4、伺服刚性的基本调节
伺服电机的刚性,实际是伺服系统的增益大小 但是可以从下面两方面来理解:
1.系统跟随指令的一个指标 2.系统抗干扰能力的一个指标
4.1伺服电机刚性的基本调节
伺服电机刚性,首先需要确定的第一个参数是:Pr0.04
通过这个方式还不能满足要求的,就要使用Panaterm软件进行调节
分析频率(FFT) 把握共振特性
矩滤波器、前馈速度,惯量
手册进行调整时, 需要设定实时自动调整功能
①把握速度环增益的范围 ②把握共振点,根据需要使用
陷波滤波器
为无效。
要求更短的整定时间时
出现共振现象时
如果此流程可 以理解,操作 就没问题了!
机械钢性No.(Pr.22)上升
共振点
截止频率: 关键点为驱动器控制速度环响应。
设定惯量比时,要与速度环增益一 致。 这里以110Hz为例,速度环的响 应区间 表示设定在110Hz的状态下。
反共振点
如果使用此项功 能,解析力将大 幅提高
・使用PANATERM分析频率功能,观察滤波器效果
下图的蓝线(黑白印刷比较图难以辨认)表示使用滤波器前,可能在200Hz付近共振点的振动状态。 红线表示使用滤波器后的波形,可以把握各滤波器的效果。
速度前馈(speed feedforward)的效果:速度(speed)观测
【实时自动调整流程图】
实行实时自动调整的情况下,
从上位控制器NC传出指令
右图表示调整流量。 实时自动调整这一功能,可 以进行自动增益切换,自动
是 结束
运转是否 正常?
设定位置环路增益,速度环
路增益,速度环路积分时间 常数、速度观测滤波器、转
转矩滤波器
整体下降
陷波滤波器
该点下降
增益调整的实际运用
最后,总结了使用操作手册在实机上进行调整的实际操作。 此前,对增益进行了阐述。实际操作的调整,要和各种过滤器一起来抑制共振现象。此外,归根结底调整是与负载 匹配的过程。根据不同情况,改变调整方法,整体流程如下图所示。
速度环增益的设定
•速度环增益——影响速度响应能力的参数,停止时,用手对联轴器加以外力, 稍微提高速度环增益(每次30),直到由于扰动伺服发生振荡马上结束的值。 •通过手的感觉来判断最好,但不可行的时候也可通过转矩及声音来判断。 •然后让电机运转,确认在运行中无振荡现象。 •在不能施加外力的情况下,一边反复使机械运行、停止,一边视转矩及声音而 定。 •最终的速度环增益的设定值,考虑到机械的个体差异以及年久的变化,应减小 10%程度设定。 目标? (如果负载的惯量比正确设定的情况下) 高刚性的机械200以上 低刚性的机械100以下 由于设定的大、小产生的影响? 太小的话,反复过冲与下冲,摇摆不定地转动。 太大的话,也会导致振动与声音,引起振荡。
判断? 用速度、位置偏差确认。想加快整定的场合,一边用位置偏差确认,一边考虑定位 完成的幅值来调整。
速度积分时间常数(speed integrated time)的效果:速度 (speed)观测
速度积分时间常数(speed integrated time)的效果: 位置偏差(position error)观测