ch6.3
CH6数显仪说明书

)仪表与2线制变送器电流信号的接线
A-S规格80×160尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
B-F规格96
外形尺寸
开孔尺寸接线端子图
开孔尺寸接线端子图
、
键调出当前参数的原设定值,闪烁位为修正位
通过键移动修改位,键增值、
键存入修改好的参数,自动转到下一参数。
键后将转到本组第
重复②
,直到显示
键进入修改状态,,,
密码在仪表上电时或
不松开,顺序进入各参数组,仪表显
键调出当前参数的原设定值,闪烁位为修改位
通过键移动修改位,键增值,
以符号形式表示参数值的参数,在修改时,闪烁位应处于末位。
重复④~ 以下为测量及显示相关参数,设置不正确,可能使仪表显示不正常。
、
种:
变送输出
变送输出有5个参数:
)——输出信号选择
,,
补偿前温度+
影响,该温度可能会高于室温。
在实际应用中,补偿导线接到输入端子,仪。
现代控制理论6.3 系统镇定

3) 求取原系统的状态反馈镇定矩阵
~ K = K1
[
⎡0 1 0 ⎤ ⎡4 0 0⎤ ⎢ ⎡0 4 0 ⎤ ⎥ −1 0 Pc = ⎢ 0 0 1 ⎥=⎢ ⎥ ⎥ ⎢ 1 4 0 0 1 4 ⎣ ⎦ ⎢1 0 − 1⎥ ⎣ ⎦ ⎣ ⎦
]
� 经检验,经状态反馈后得到的如下闭环系统矩阵为镇定的。
⎡0 0 − 2⎤ ⎥ A − BK == ⎢ 0 − 3 − 1 ⎢ ⎥ ⎢ ⎣1 0 − 3⎥ ⎦
̃ (A ̃, B ̃,C ̃ ) 在稳定 (3) 由于原系统Σ(A,B,C)与结构分解后的系统 ∑ ̃ 性和能控性上等价,假设K为系统Σ的任意状态反馈矩阵,对 ∑ ~ ~ ~ K = KP = [ K K 2 ] ,可得闭环系统的系统矩阵 引入状态反馈阵 c 1 为 ̃ ⎡A ̃ − BK ̃ ̃ = ⎢ 11 A ⎢ ⎣0 ̃ ⎤ ⎡B ̃ −B ̃K ̃ A ̃ −B ̃K ̃ ⎤ ̃⎤ ⎡A A 12 11 1 1 12 1 2 1 ̃ K ̃ ⎤=⎢ − ⎢ ⎥⎡ K ⎥ ⎥ 1 2 ⎣ ⎦ ̃ ̃ 0 A22 ⎥ 0 A22 ⎢ ⎥ ⎦ ⎣ ⎦ ⎣ ⎦
ch6-part1-FX系列PLC的常用应用指令
MC2区 执行CJ 时,须
MC1中的MC有效
ch.6 -11
Kunming University of Science & Technology
6.2.2 条件跳转
跳转指令调用的指针:P0 ~ P4095。其中P63用 于跳转到END位置,而END指令处不能标记P63。 跳转方向:
可以跳转到比跳转指令步序号小的位置,但要注意 扫描时间不能超过200ms,否则会产生看门狗定时器 出错 多个跳转指令也可以向一个地方跳转,但某个跳转 程序段所使用的指针不能再供其它跳转程序段或子程 序段所使用(即左母线左边的标号标记不能重复)
用法举例: P163图6.18
ch.6 -25
Kunming University of Science & Technology
6.3.5 BCD与BIN之间的相互转换
2. BCD转换成BIN指令(FNC19 BIN):将由源[S.]所指定的
BCD数据转换成BIN数据,并将转换结果传送到由目标[D.] 所指定的元件中。
用法举例:
ch.6 -10
Kunming University of Science & Technology
6.2.2 条件跳转
跳转指令(CJ)与主控指令MC的关系:
MC区外 MC区外 MC区内 MC区内
MC1区
MC区外 MC区内 MC区内 MC区外
CJ 的执行与MC 是否有效无关 执行CJ 时, 须MC有效
ch.6 -18
Kunming University of Science & Technology
6.3.2 触点式比较指令
触点式比较指令(FNC224 ~ FNC246)
ch6.3二组分理想液态混合物的气液平衡相图
二组分系统的相律分析
•根据相律 F = C - P + 2 = 4 - P
•F最大= 3 即最多可以有三个独立变量, 这三个变量通常是T,p 和组成 x
•P最大= 4 即最多可以四相平衡共存
•通常研究方法 •固定一个变量,用二维坐标描述使图形简单易用。 ( )T ( )P ( )x
两个纯液体可按任意比例互溶,每个组分都服从拉乌尔定律, 这样组成了理想的完全互溶双液系,或称为理想的液体混合物
pB pB xB
* pB
p
* A
pA pA (1 xB )
A
xB
B
∵T=常数,且系统达到气液平衡时,自由度数F= 1, 表明压力和组成中只有一个为变量,若选液相组成xB 为独立变量,即 p = f(xB),且yB = f(xB)
(2) p-x-y图
这是 p-x 图的一种,把液相组成 x 和气相组成 y 画在同一张图上。 • yA 和 yB的求法如下:
G1
tB pB p* a B ( t ) xB yB p 101.325kPa l * * 若已知t温度下的 pA (t )和pB (t ) A x B B 求得(t, xB , yB ) 以此类推可获得不同温度下的气液相组成,进而画出 气相点和液相点
(2)T-x图分析
在T-x图上,气 相线在上,液相线在 下,上面是气相区, 下面是液相区,梭形 区是气-液两相区。 •两条线 F=1 •三个区域 单相区 F=2 ; 气-液平衡区 F=1。 •两端点 F=0
(1)T-x图可通过计算获得
101.325kPa p (t )(1 x B ) p (t ) x B
* A * B
* * p* ( t ) ( p ( t ) p A B A ( t ))x B
ch6常用低压电器
第6 章常用低压电器与控制电路6.1 常用低压电器6.2 三相异步电动机的正、反转控制电路6.3 三相异步电动机降压起动电路*6.4 行程开关和限位控制电路*6.5 时间继电器和延时控制电路*6.6 单相电动机的控制*6.7 可编程序控制器及其应用基础6.1 常用低压电器是指交流1 200 V、直流1 500 V 以下用来控制与保护用电设备的电器。
6.1.1 闸刀开关闸刀开关是一种手动电器。
主要用作电源的隔离开关或电源开关使用。
39单刀符号单刀开关三刀开关三刀开关符号做电源开关使用时,电动机的容量不能大于7.5 kW。
其额定电流应大于电动机额定电流的3 倍。
6.1.2 铁壳开关与闸刀开关不同是熔断器和刀片与刀座等安装在薄钢板制成的防护外壳内。
速断弹簧用来加快刀片与刀座分断速度,减少电弧。
铁壳开关外壳上还装有机械联锁装置。
可用在电力排灌、电热器等装置中。
6.1.3 组合开关(转换开关)手柄动触点静触点组合开关外形内部结构手柄沿顺时针或逆时针转动,带动动触点与静触点接通或断开。
符号6.1.4 按钮静触片静触片静触片静触片动触片内部结构用手按下按钮帽时,动触片向下移动,上面的动断触点先断开,下面的动合触点后闭合。
当松开按钮帽时,在复位弹簧作用下,动触点复位。
这种按钮称为复合按钮。
符号6.1.5 熔断器熔断器是一种短路保护电器。
当过大的短路电流流过易熔合金制成的熔体时,熔体迅速熔断,达到保护电路及电气设备的目的。
插入式熔断器螺旋式熔断器管式熔断器填料式熔断器6.1.6 交流接触器是一种自动控制电器,属于电磁式开关。
1. 结构是由电磁铁和触头组两部分组成。
接触器原理示意图电磁铁部分有静铁心动铁心吸引线圈反力弹簧静铁心、动铁心、吸引线圈、反力弹簧触头部分有静触点、动触点、辅助触点。
静触点动触点辅助触点“主触点”、主触点说明:1. 主触点通常为3 对动合触点,它的接触面积较大,允许流过的电流较大;2. 主触头上都设有灭弧装置。
Ch6 微型计算机原理与接口技术 答案
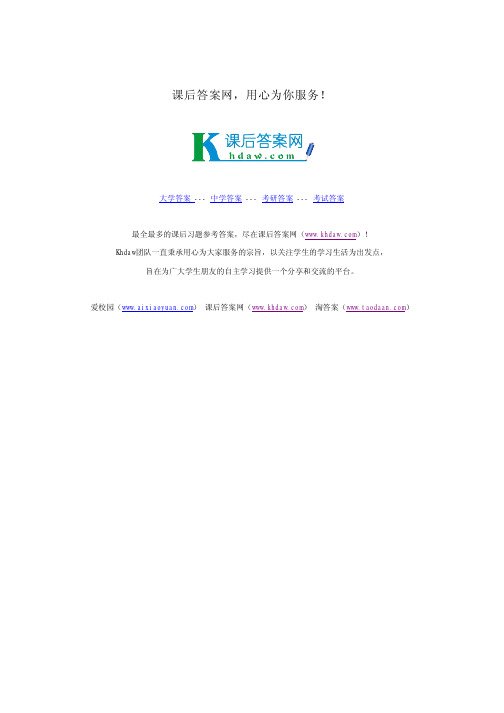
解:16位地址信号通过译码电路与74LS244芯片连接。其连接如下图所示。
74LS244
...
…
IOR
A 15
A 13
A 12
A 11
系
A 10
统
A9
总
A8
线
A2
A 14
A7
A6
A5 A4 A3
A A
01
DB
≥1 ≥1
&
D0
I0
I1 D7
. . .
E1 I7
E2
2
www.khd课后a答w案.网com
断点的逆过程。即CPU会自动地将堆栈内保存的断点信息弹出到IP、CS和FLAG中,保证被中断 的程序从断点处继续往下执行。 6.11 CPU满足什么条件能够响应可屏蔽中断?
CH6 高频功率放大器

尖顶余弦脉冲的分解系数还可以根据的数值查表求出各分解系数的值。 尖顶余弦脉冲的分解系数还可以根据的数值查表求出各分解系数的值。 还可以根据的数值查表求出各分解系数的值
αn (θc ) =
Icmn 2 sinnθc cosθc − ncosnθc sinθc = ⋅ iCmax π n(n2 −1)(1− cosθc )
3)波形图分析vCE i 波形图分析
i
c
C
A
v BEmax= −VBB+Vbm
动态特性曲线、 动态特性曲线、工作路
iCmax
Icm
−θC θC
E E
B wt
截距
Icm cosθc
VCES
V0
VCC
vCE
v CE = VCC − vc
•Q
−θC
≈ VCC − I cm1 ( Z P ) w cos wt = VCC − Vcm cos wt
v
0
iC = g cr vCE
截止区 vCE
gc (vBE − VBZ ) iC = 0
vBE > VBZ vBE < VBZ
选取vBE为参变量是因为晶体管的输入电 压是正弦或是余弦, 压是正弦或是余弦,由于管子输入特性 的 非线性,所得的输入电流i 非线性,所得的输入电流 B就不是正弦或 余弦了,为了避免输入特性的非线性, 余弦了,为了避免输入特性的非线性,常 作参量测出输出特性。 以vBE作参量测出输出特性。 cxl1688@ 《高频电路》 第6章 高频电路》 章
1)波形图分析iC )波形图分析
截止区
ic
饱和区 过压区
ic
放大区 欠压区
iCmax
Icm
ch6-3角动量及角动量的守恒律
1)外力为零 F 0
O
2)有心力 F 0 例:如果先使小球以速度 v1 在水平面内沿半径为 r1 的圆周运动 在有心力作用下,使小球半径减小到 r2 则 v2 r2 v1r1 7
四.刚体的角动量
上页 目录 下页
1. 刚体定轴转动的动量矩
刚体上任一质点对 Z 轴的动量矩 都具有相同的方向
若两小孩质量不等grdtdjdtdjdt15质点的角动量刚体绕定轴转动的角动量质点的角动量守恒定律质点的角动量定理刚体的角动量守恒定律63角动量角动量角动量守恒定律角动量守恒定律质点刚体返回下页目录刚体绕定轴转动的角动量定理dlmdt陀螺啊啊盘状星系螺旋星云角动量守恒的结果17质点刚体质量牛顿运动定律上节要点回顾18质点刚体速度动量定理本节要点回顾角动量角动量定理质量角动量守恒191为什么角动量定理和角动量守恒定律适用于惯性系思考题2为什么直升机在其尾部要装置一在竖直平面内转动的尾翼为了避免门与墙壁的撞击常常在门和墙上安装制动器目前不少制动器安装在靠近地面如图位置然而如果制动器的位置选择的合适在门与制动器发生碰撞过程中可使门轴受的撞击力减小到最低程度试分析其安装的最佳位置
思考题
1)为什么角动量定理和 角动量守恒定律适用于惯性系 ? 2)为什么直升 机在其尾 部要装置 一在竖直 平面内转 动的尾翼 ? 3)你了解猫尾巴的功能吗?
猫
19
例为了避免门与墙壁的撞击,常常在门和墙上安装制动器, 目前不少制动器安装在靠近地面如图位置,然而如果制动器的位 置选择的合适,在门与制动器发生碰撞过程中,可使门轴受的撞 击力减小到最低程度,试分析其安装的最佳位置。 解:若门的质量分布是均 匀的,选择门平面为OXZ 平面,讨论制动器沿x方向 的最佳安装位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
流水灯控制
该电路使用了发光二极管电路和时钟电路,相关电路参考“3.2.5 发光二极管(LED)电路”和“3.2.4 时钟电路(CLK)”
功能描述:通过CPLD来控制发光二极管,从L1到L12依次点亮,在下一个灯两的时候前面的灯一直保持亮;看上去的效果就象亮点从L1一直流向L12,连后一起熄灭,再重复流水过程,故命名流水灯。
源程序:(GUIDE光盘/samples/LEDWATER/LEDWATER.v)
//流水灯控制 ledwater.v
//DOWNLOAD FROM
module LEDWATER (L,CLK);
output [12:1] L;
CLK;//CLK=2Hz
input
reg[13:1]
LREG;
reg[13:1] LREGN;
always@(posedge CLK)
begin
LREG=LREG<<1;
LREG=13'h1FFF;
if(LREG==13'h0000)
LREGN=~LREG;
end
assign L=LREGN[12:1];
endmodule
操作:在QUARTUS中建立工程,并用上面的语句建立 verilog-HDL 文件,保存、编译,连后选定芯片EPM7128SLC84-15,并按下表指定管脚:
再编译、仿真、下载,并把排针JP4、JP5上和上表表对应脚用跳冒插上,将排针J2上的2Hz对应脚用跳冒插上,你将看到实验结果注意:源程序中L位12位,而LREG位13位,这是为了让所有灯点亮后延迟0.5S在熄灭因为“if(LREG==13'h0000)
LREG=13'h1FFF;”中语句执行时间可以看为零。