利用新的MATLAB内置函数和Simulink模型对机电运动控制应用的电机分析、控制和验证(IJISA-V6-N6-10)
matlab simulink案例

matlab simulink案例1. 电机传动系统模拟在这个案例中,我们将使用Simulink来模拟一个简单的电机传动系统。
我们将建立一个由电机、负载和控制器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整输入信号和控制器参数,我们可以观察系统的响应,并优化控制器的性能。
2. PID控制器设计在这个案例中,我们将使用Simulink来设计一个PID控制器,并将其应用于一个简单的控制系统。
我们将建立一个由传感器、控制器和执行器组成的系统,并使用Simulink来模拟系统的动态行为。
通过调整PID控制器的参数,我们可以观察系统的响应,并优化控制器的性能。
3. 机器人路径规划在这个案例中,我们将使用Simulink来进行机器人的路径规划。
我们将建立一个由传感器、路径规划器和执行器组成的系统,并使用Simulink来模拟机器人在不同环境中的路径规划行为。
通过调整路径规划器的算法和参数,我们可以优化机器人的路径规划性能。
4. 电力系统稳定性分析在这个案例中,我们将使用Simulink来进行电力系统的稳定性分析。
我们将建立一个由发电机、负载和传输线路组成的电力系统,并使用Simulink来模拟系统的动态行为。
通过调整系统的参数和控制策略,我们可以评估系统的稳定性,并优化系统的运行性能。
5. 汽车动力学模拟在这个案例中,我们将使用Simulink来进行汽车的动力学模拟。
我们将建立一个由车辆、发动机和传动系统组成的模型,并使用Simulink来模拟车辆在不同驾驶条件下的动力学行为。
通过调整车辆参数和控制策略,我们可以评估车辆的性能,并优化驾驶体验。
6. 无人机飞行控制在这个案例中,我们将使用Simulink来进行无人机的飞行控制。
我们将建立一个由无人机、传感器和控制器组成的系统,并使用Simulink来模拟无人机在不同飞行任务下的控制行为。
通过调整控制器的参数和飞行任务的要求,我们可以优化无人机的飞行性能。
MATLABSIMULINK永磁同步电机矢量控制系统仿真
MATLABSIMULINK永磁同步电机矢量控制系统仿真一、本文概述随着电机控制技术的快速发展,永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)在工业、交通和能源等领域的应用越来越广泛。
矢量控制作为PMSM的一种高效控制策略,能够实现对电机转矩和磁链的精确控制,从而提高电机的动态性能和稳态性能。
然而,在实际应用中,矢量控制系统的设计和调试过程往往复杂且耗时。
因此,利用MATLAB/Simulink进行永磁同步电机矢量控制系统的仿真研究,对于深入理解矢量控制原理、优化控制策略以及提高系统性能具有重要意义。
本文旨在通过MATLAB/Simulink平台,建立永磁同步电机矢量控制系统的仿真模型,并对其进行仿真分析。
本文将对永磁同步电机的基本结构和数学模型进行介绍,为后续仿真模型的建立提供理论基础。
本文将详细阐述矢量控制策略的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
在此基础上,本文将利用MATLAB/Simulink中的电机控制库和自定义模块,搭建永磁同步电机矢量控制系统的仿真模型,并对其进行仿真实验。
本文将根据仿真结果,对矢量控制系统的性能进行分析和评价,并提出优化建议。
通过本文的研究,读者可以全面了解永磁同步电机矢量控制系统的基本原理和仿真实现方法,为后续的实际应用提供有益的参考和指导。
本文的研究结果也为永磁同步电机控制技术的发展和应用提供了有益的探索和启示。
二、永磁同步电机数学模型永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高性能的电机,广泛应用于各种工业领域。
为了有效地对其进行控制,我们需要建立其精确的数学模型。
PMSM的数学模型主要包括电气方程、机械方程和磁链方程。
PMSM的电气方程描述了电机的电压、电流和磁链之间的关系。
在dq旋转坐标系下,电气方程可以表示为:V_d &= R_i I_d + \frac{d\Phi_d}{dt} - \omega_e \Phi_q \ V_q &= R_i I_q + \frac{d\Phi_q}{dt} + \omega_e \Phi_d其中,(V_d) 和 (V_q) 分别是d轴和q轴的电压;(I_d) 和 (I_q) 分别是d轴和q轴的电流;(\Phi_d) 和 (\Phi_q) 分别是d轴和q轴的磁链;(R_i) 是定子电阻;(\omega_e) 是电角速度。
matlab2010b电机仿真
matlab2010b电机仿真在MATLAB 2010b中进行电机仿真可以使用Simulink和Simscape Power Systems工具箱。
下面是一个简单的示例,演示了如何使用Simulink建立并运行一个电机仿真模型。
1. 打开MATLAB 2010b软件。
2. 在Simulink库浏览器中找到电机建模组件。
可以在“Simulink”标签下的“Electrical”部分找到一些相关组件,如“Induction Motor”和“DC Motor”等。
3. 双击相应的组件,将其拖动到模型编辑器中。
可以使用这些组件来构建一个电机模型。
4. 连接电机建模组件的输入和输出端口。
例如,可以将一个输入信号传递到电机的控制端口,将输出信号连接到电机的运动端口。
5. 配置电机的参数。
双击电机组件,可以打开参数对话框,并设置电机的参数,如转矩、速度、电压等。
6. 添加其他必要的组件和连接,以完成电机模型的搭建。
7. 单击模型编辑器中的“运行”按钮,开始仿真电机模型。
可以通过观察仿真结果和信号波形来分析电机的行为和性能。
注意:MATLAB 2010b版本可能需要安装额外的工具箱才能进行电机仿真。
可以在软件安装目录下的“toolbox”文件夹中查找相关的工具箱,并确保其已经安装和激活。
此外,Simscape Power Systems工具箱也提供了一系列电机模型和仿真组件,可以用于建立更精细和复杂的电机系统模型。
可以按照类似的步骤,使用Simscape Power Systems工具箱中的电机组件进行仿真。
希望以上信息对您有帮助!。
matlabsimulink在电机中的仿真

模块化设计
集成优化工具
Simulink的模块化设计使得电机的各个部 分可以独立建模,然后通过模块的连接来 构建完整的系统模型,便于管理和修改。
Matlab提供了多种优化工具,可以对电机 控制系统进行优化设计,提高系统的性能 。
Matlab Simulink在电机仿真中的挑战
模型复杂度
电机的数学模型通常比较复杂,涉及大 量的非线性方程,这给模型的建立和仿
电机仿真的基本方法和流程
数学建模
根据电机的物理原理, 建立电机的数学模型, 包括电路方程、磁路 方程和运动方程等。
参数识别
根据实际电机的参数, 对数学模型进行参数 识别和调整,提高仿 真的准确性。
建立仿真模型
在Matlab Simulink 中建立电机的仿真模 型,包括电机本体和 控制系统的模型。
验证设计
通过仿真可以验证电机的设计是否满足要求, 提前发现并修正设计中的问题。
性能预测
仿真可以帮助预测电机的性能,包括转速、 转矩、效率等,为实际应用提供参考。
控制系统设计
通过仿真可以验证控制系统的设计是否正确, 提高控制系统的稳定性和精度。
降低成本
仿真可以减少试验次数,降低试验成本,缩 短研发周期。
04
案例分析
直流电机仿真案例
总结词
通过Simulink对直流电机进行仿真,可以模拟电机的启动、调速和制动等过程,为实际应用提供理论依据。
详细描述
在直流电机仿真案例中,我们使用Simulink的电机模块库来构建电机的数学模型。通过设置电机的参数,如电枢 电阻、电枢电感、励磁电阻和励磁电感等,可以模拟电机的动态行为。通过改变输入电压或电流,可以模拟电机 的启动、调速和制动等过程,并观察电机的响应特性。
电机控制基于Simulink的仿真

电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
• 使用工作空间变量作为系统输入信号
Simulink 与 MATLAB 的数据交互是相互的,除 了可以将信号输出到MATLAB工作空间中之外,用 户还可以使用MATLAB工作空间中的变量作为系统 模 型 的 输 入 信 号 。 使 用 Sources 模 块 库 中 的 From Workspace模块可以将 MATLAB工作空间中的变量 作为系统模型的输入信号。此变量的格式如下所示:
• 使用鼠标左键单击并拖动以改变信号连线 的路径。 • 按下Shift键的同时,在信号连线上单击鼠 标左键并拖动,可以生成新的节点。 • 在节点上使用鼠标左键单击并拖动,可以 改变信号连线路径。
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
信号组合
在利用Simulink进行系统仿真时,在很多 情况下,需要将系统中某些模块的输出信号(一 般为标量)组合成一个向量信号,并将得到的信 号作为另外一个模块的输入。
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
• 例:简单系统的输入为一个正弦波信号,输出为
此正弦波信号与一个常数的乘积。要求建立系统 模型,并以图形方式输出系统运算结果。 • 已知系统的数学描述为 系统输入: u(t)=sin t , t≥0 系统输出: y(t)=au(t), a≠0
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
Simulink应用领域
电机控制课程设计:MATLAB/Simulink设计
仪器科学与电气工程学院
2 Simulink启动及模型建立
基于MATLAB的直流电机双闭环调速系统的设计与仿真
基于MATLAB的直流电机双闭环调速系统的设计与仿真直流电机双闭环调速系统是一种常见的控制系统,常用于工业生产中对电机速度的精确控制。
本文将基于MATLAB软件进行直流电机双闭环调速系统的设计与仿真,包括系统设计、参数设置、控制策略选择、系统仿真以及性能分析等方面。
文章将以1200字以上的篇幅进行详细阐述。
一、系统设计直流电机双闭环调速系统由速度环和电流环构成。
速度环控制系统的输入为速度设定值和电机实际速度,输出为电机期望电压;电流环控制系统的输入为速度环输出的电压和电机实际电流,输出为电机实际电压。
通过控制电机的期望电压和实际电压,达到对电机速度的调控。
二、参数设置在进行系统仿真之前,需要确定系统中各个参数的值。
包括电机的额定转矩、额定电压、电感、电阻等参数,以及控制环节的比例增益、积分增益、微分增益等参数。
这些参数的选择会影响系统的稳定性和动态性能,需要根据实际情况进行调整。
三、控制策略选择常见的控制策略包括PID控制、PI控制、PD控制等。
在直流电机双闭环调速系统中,可以选择PID控制策略。
PID控制器由比例环节、积分环节和微分环节组成,可以提高系统的稳定性和响应速度。
四、系统仿真在MATLAB中进行直流电机双闭环调速系统的仿真,可以使用Simulink模块进行搭建。
根据系统设计和参数设置,搭建速度环和电流环的控制器,连接电机实际速度和电机实际电流的反馈信号,输入速度设定值和电机期望电流,输出电机期望电压。
通过仿真可以得到系统的动态响应曲线,评估系统的性能。
五、性能分析在仿真结果中,可以分析系统的静态误差、超调量、调整时间等指标,评估系统的控制性能。
通过参数调整和控制策略更改等方式,可以优化系统的控制性能,使系统达到更好的调速效果。
总结:本文基于MATLAB软件对直流电机双闭环调速系统进行了设计与仿真。
通过系统设计、参数设置、控制策略选择、系统仿真以及性能分析等步骤,可以得到直流电机双闭环调速系统的动态响应曲线,并通过参数调整和控制策略更改等方式,优化系统的控制性能。
异步电机调压调速系统的matlab仿真代码

异步电机调压调速系统的matlab仿真代码异步电机是一种常见的电动机类型,广泛应用于各个领域的工业控制系统中。
在工业生产中,对异步电机的调压调速系统进行仿真设计可以帮助工程师们更好地理解电机的工作原理,并且优化控制算法,提高电机的性能和效率。
本文将根据异步电机调压调速系统的需求,介绍如何使用Matlab进行仿真设计。
异步电机调压调速系统主要包括三个部分:电机模型、调速控制器和电源电压。
首先,我们需要建立电机的模型。
在Matlab中,我们可以使用Simulink来搭建电机模型。
在搭建电机模型之前,我们需要明确电机的参数,例如额定功率、额定转速、定子电阻、定子电感、转子电阻、转子电感等。
根据这些参数,我们可以使用Simulink中的“Synchronous Machine”模块来搭建电机模型。
通过调整模块的参数,我们可以设定电机的额定功率和转速。
此外,我们还可以通过添加噪声、扰动等,模拟电机在实际工况下的运行情况。
接下来,我们需要设计调速控制器。
常见的调速控制算法有PID控制、模糊控制、自适应控制等。
在Matlab中,我们可以使用Simulink中的“PID Controller”模块来实现PID控制算法。
在使用PID控制器模块之前,我们需要根据电机的特性调整控制器的参数,例如比例系数、积分时间和微分时间。
通过不断调整参数和观察仿真结果,我们可以优化控制器的性能,实现电机的稳定调速。
最后,我们需要模拟电源电压对异步电机的影响。
在实际应用中,供电电压的波动会对电机的转速和输出功率产生影响。
在Matlab中,我们可以通过添加波动的直流电压源来模拟这种影响。
通过调整电压源的幅值和频率,我们可以观察电压波动对电机转速和输出功率的影响。
这对于调压调速系统的设计和优化非常重要。
在完成上述步骤后,我们可以对整个异步电机调压调速系统进行仿真。
通过控制器和电源电压的输入,我们可以观察电机的转速、输出功率和电流等参数的变化情况。
MATLAB电机控制综合仿真实验
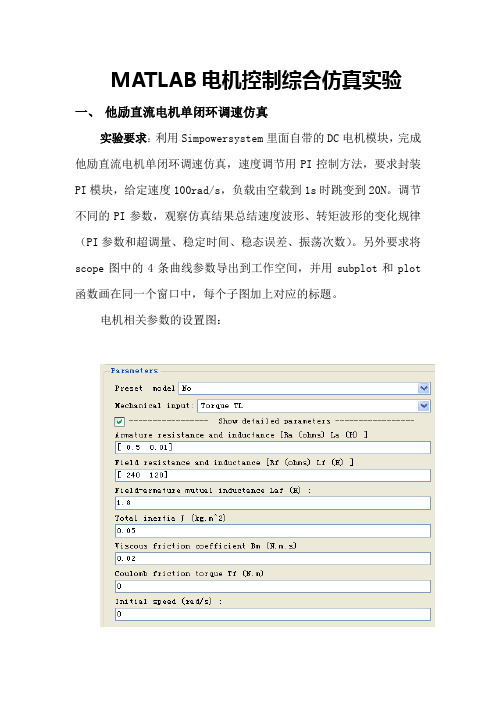
MATLAB电机控制综合仿真实验一、他励直流电机单闭环调速仿真实验要求:利用Simpowersystem里面自带的DC电机模块,完成他励直流电机单闭环调速仿真,速度调节用PI控制方法,要求封装PI模块,给定速度100rad/s,负载由空载到1s时跳变到20N。
调节不同的PI参数,观察仿真结果总结速度波形、转矩波形的变化规律(PI参数和超调量、稳定时间、稳态误差、振荡次数)。
另外要求将scope图中的4条曲线参数导出到工作空间,并用subplot和plot 函数画在同一个窗口中,每个子图加上对应的标题。
电机相关参数的设置图:仿真原理图:在仿真试验中需要按照实验要求对PI控制器子系统进行封装,然后更改Kp、Ki参数值的大小。
封装PI模块图如下:Plot绘图程序:>>subplot(411)>> plot(t,W,'r'),title('转速')>> subplot(412)>> plot(t,Ia,'b'),title('电枢电流')>> subplot(413)>> plot(t,Te,'g'),title('转矩')>> subplot(414)>> plot(t,If,'y'),title('励磁电流')速度调节用PI控制方法,给定速度100rad/s,负载由空载到1s 时跳变到20N,调节不同的PI参数,从PI模块封装中调节,修改不同的参数Ki 、Kp观察仿真结果。
Ki=100, Kp=5;050100w (r a d /s )00.51 1.52 2.53 3.54 4.55-2000200I a (A )-202I f (A )-1000100T e (N .m )Ki=2, Kp=1;w (r a d /s)I a (A)00.51 1.52 2.53 3.54 4.55I f (A)00.51 1.52 2.53 3.54 4.55T e (N .m )二、 他励直流电机闭环调速系统仿真实验要求:利用Simulink 基本模块搭建他励直流电机闭环调速系统直流电机子模块,根据以下电机数学模型搭建:电磁转矩公式:e M a T C I =Φ 动力学平衡方程:e L m d T T B J dtωω--=电机模块要求封装,参数20.05kg m J =⋅,0.02N m s m B =⋅⋅,165m C =,0.01Wb f Φ=,恒定负载T L =20N 点击封装模块时输入。
基于MATLAB的电机仿真分析
基于MATLAB的电机仿真分析
电机是一种将电能转换为机械能的设备,广泛应用于各种电动设备和工业自动化系统中。
为了研究电机的性能和行为,进行电机仿真分析是必不可少的。
MATLAB是一种功能强大的数学软件,它提供了丰富的工具和功能,使得电机仿真分析变得更加方便和高效。
下面将介绍基于MATLAB的电机仿真分析的主要内容和步骤。
电机仿真分析的第一步是建立电机的数学模型。
数学模型可以根据电机的物理特性和运行原理来建立,可以包括电机的电路模型和动力学模型。
电机的电路模型可以根据电机的绕组和磁路特性来建立,常用的模型包括直流电机模型、交流电机模型和步进电机模型等。
电机的动力学模型可以描述电机的转矩和速度响应特性,可以根据电机的惯性、摩擦等因素来建立。
电机仿真分析的第二步是选择合适的仿真方法和工具。
MATLAB提供了多种电机仿真工具,例如Simulink、Simscape和Power System Blockset等。
Simulink是MATLAB中的一个建模和仿真工具,可以用来建立和模拟电机的系统级模型。
Simscape是一个物理建模工具箱,可以用来建立电机的物理模型,包括电气子系统、机械子系统和热子系统等。
Power System Blockset是一个电力系统建模工具箱,可以用来建立和模拟电机系统的电力系统模型。
然后,电机仿真分析的第三步是进行仿真实验和分析。
根据建立的电机模型,可以进行各种仿真实验和分析,例如电机的稳态和暂态响应特性、电机的效率和能耗、电机的控制性能等。
通过仿真实验和分析,可以评估电机的性能和行为,优化电机的设计和控制方法。
simulink 复数积分
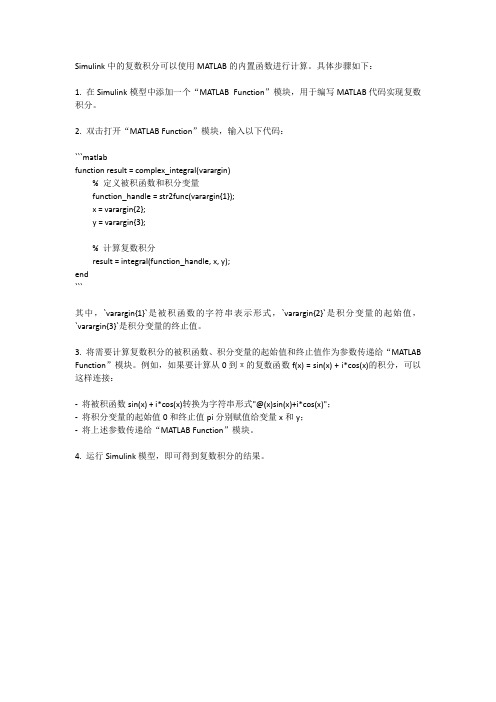
Simulink中的复数积分可以使用MATLAB的内置函数进行计算。
具体步骤如下:
1. 在Simulink模型中添加一个“MATLAB Function”模块,用于编写MATLAB代码实现复数积分。
2. 双击打开“MATLAB Function”模块,输入以下代码:
```matlab
function result = complex_integral(varargin)
% 定义被积函数和积分变量
function_handle = str2func(varargin{1});
x = varargin{2};
y = varargin{3};
% 计算复数积分
result = integral(function_handle, x, y);
end
```
其中,`varargin{1}`是被积函数的字符串表示形式,`varargin{2}`是积分变量的起始值,`varargin{3}`是积分变量的终止值。
3. 将需要计算复数积分的被积函数、积分变量的起始值和终止值作为参数传递给“MATLAB Function”模块。
例如,如果要计算从0到π的复数函数f(x) = sin(x) + i*cos(x)的积分,可以这样连接:
-将被积函数sin(x) + i*cos(x)转换为字符串形式"@(x)sin(x)+i*cos(x)";
-将积分变量的起始值0和终止值pi分别赋值给变量x和y;
-将上述参数传递给“MATLAB Function”模块。
4. 运行Simulink模型,即可得到复数积分的结果。
matlab-SIMULINK仿真实例
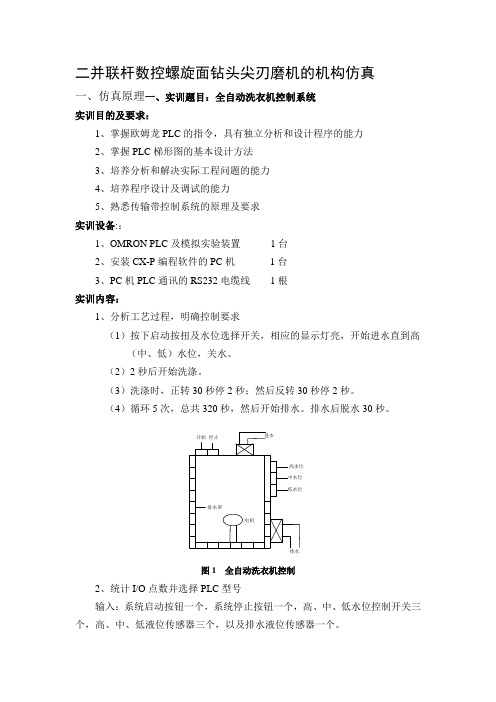
二并联杆数控螺旋面钻头尖刃磨机的机构仿真一、仿真原理一、实训题目:全自动洗衣机控制系统实训目的及要求:1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力2、掌握PLC梯形图的基本设计方法3、培养分析和解决实际工程问题的能力4、培养程序设计及调试的能力5、熟悉传输带控制系统的原理及要求实训设备::1、OMRON PLC及模拟实验装置1台2、安装CX-P编程软件的PC机1台3、PC机PLC通讯的RS232电缆线1根实训内容:1、分析工艺过程,明确控制要求(1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。
(2)2秒后开始洗涤。
(3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。
(4)循环5次,总共320秒,然后开始排水。
排水后脱水30秒。
图1 全自动洗衣机控制2、统计I/O点数并选择PLC型号输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。
PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。
输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。
可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。
3、I/O分配表1 全自动洗衣机控制I/O分配表输入输出地址名称地址名称00000 启动系统按钮01000 排水显示灯00001 高水位选择按钮01001 脱水显示灯00002 中水位选择按钮01002 进、出水显示灯00003 低水位选择按钮01003 高水位显示灯00004 排水液位传感器01004 中水位显示灯00005 停止系统按钮01005 低水位显示灯00006 高水位液位传感器01006 电机正转显示灯00007 中水位液位传感器01007 电机反转显示灯00008 低水位液位传感器4、PLC控制程序设计及分析实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。
基于MATLABSIMULINK的交流电机调速系统建模与仿真
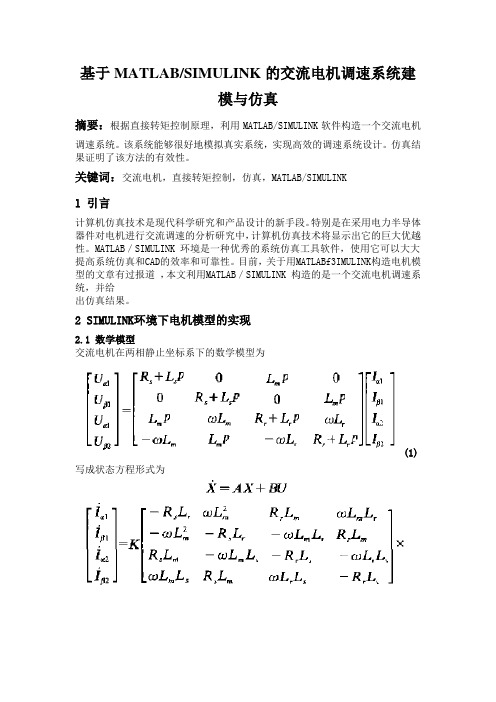
基于MATLAB/SIMULINK的交流电机调速系统建模与仿真摘要:根据直接转矩控制原理,利用MATLAB/SIMULINK软件构造一个交流电机调速系统。
该系统能够很好地模拟真实系统,实现高效的调速系统设计。
仿真结果证明了该方法的有效性。
关键词:交流电机,直接转矩控制,仿真,MATLAB/SIMULINKl 引言计算机仿真技术是现代科学研究和产品设计的新手段。
特别是在采用电力半导体器件对电机进行交流调速的分析研究中,计算机仿真技术将显示出它的巨大优越性。
MATLAB/SIMULINK 环境是一种优秀的系统仿真工具软件,使用它可以大大提高系统仿真和CAD的效率和可靠性。
目前,关于用MATLABf3IMULINK构造电机模型的文章有过报道,本文利用MATLAB/SIMULINK 构造的是一个交流电机调速系统,并给出仿真结果。
2 SIMULINK环境下电机模型的实现2.1 数学模型交流电机在两相静止坐标系下的数学模型为(1)写成状态方程形式为(2)式中,分别为两相静止坐标系下定子、转子电压和电流;分别为电机的定子、转子自感和互感;分别为电机的定子、转子电阻;为电机的转速。
2.2 SIMULINK模型式(2)中的A阵可分解为式中:对应于图1中的。
在每次积分计算时,先算出BU和AX,这样State—Space模块就可以对电流状态方程进行积分求解了。
同时也解决了非定常微分方程的求解问题。
含Demux模块的部分是对磁链的计算。
Fcn,Gain模块完成式(4)的计算用SIMULINK 构造电机模型如图l所示。
3 调速系统和仿真结果电机模型实现后就可以构造调速系统了。
在本文中,采用直接转矩控制方法。
调速系统框图构造如图2所示。
图中PID 块为转速调节器,为定子磁链,绐定=1.2Wb。
PWM块为PWM逆变器,其输人为电压开关信号,输出为三相电压。
DSRCONTROL块为用MATLAB语言编程实现的直接转矩控制程序。
使用Simulink进行无刷直流电机控制仿真

使用Simulink进行无刷直流电机控制仿真无刷直流电机是一种常用于各种工业自动化和机器人应用中的电机类型。
与传统的直流电机相比,无刷直流电机具有较高的效率、较低的噪音和较长的寿命。
Simulink是一种功能强大的工具,用于进行动态系统建模和仿真。
在Simulink中,可以使用Simscape Power Systems工具箱对无刷直流电机进行模拟和控制。
在进行无刷直流电机控制仿真之前,首先需要建立电机的数学模型。
无刷直流电机的数学模型可以由电磁动力学定律得出。
模型包括电机的旋转动力学和电磁动力学部分。
电机的旋转动力学部分描述了转子速度和转矩之间的关系,而电磁动力学部分描述了电机的电流和磁场之间的关系。
建立无刷直流电机的数学模型后,可以在Simulink中进行仿真。
在Simulink中,可以使用不同的模块来模拟电机的不同部分,如电压源、电流控制器和速度控制器等。
可以使用电压源模块来模拟电机的输入电压,使用电流控制器模块来模拟电机的电流控制,使用速度控制器模块来模拟电机的速度控制。
此外,还可以使用作用在电机上的外部负载模块来模拟电机的负载情况。
在进行无刷直流电机控制仿真时,可以使用控制器来调整电机的输入电压和输出速度,以实现所需的转矩和速度控制。
在Simulink中,可以使用PID控制器模块来实现电机的控制。
PID控制器可以根据电机的输入电压和输出速度之间的误差来调整控制信号,以使电机的输出速度达到预期的目标值。
在完成无刷直流电机控制仿真后,可以使用Simulink中的数据可视化工具来分析仿真结果。
可以绘制电机输入电压、输出速度和负载转矩等变量随时间的变化曲线,以评估电机控制系统的性能。
总之,使用Simulink进行无刷直流电机控制仿真可以帮助工程师更好地了解电机的工作原理和性能。
通过仿真,可以优化电机控制系统的设计参数,提高电机的性能和效率。
同时,仿真还可以减少现场试验的时间和成本。
因此,Simulink是进行无刷直流电机控制仿真的理想工具。
matlab电机仿真精华50例
matlab电机仿真精华50例Matlab是一种功能强大的数学仿真软件,可用于电机仿真的建模和分析。
以下是50个精华的Matlab电机仿真例子,涵盖了各种不同类型的电机和相关问题。
1. 直流电机的速度控制仿真:使用PID控制算法实现直流电机的速度控制,并观察不同参数设置对性能的影响。
2. 三相感应电机启动仿真:模拟三相感应电机的启动过程,包括起动电流和转矩的变化。
3. 永磁同步电机的矢量控制仿真:使用矢量控制算法实现永磁同步电机的速度和转矩控制。
4. 步进电机的脉冲控制仿真:通过给步进电机输入脉冲信号来实现精确的位置控制。
5. 交流电机的谐波分析仿真:分析交流电机的谐波失真情况,并提供相应的滤波解决方案。
6. 混合动力电机系统仿真:模拟混合动力汽车中的电动机和传统发动机的协同工作,评估燃油效率和性能。
7. 电机热仿真:通过建立电机的热传导模型,分析电机工作过程中的温度分布和热损耗。
8. 电机故障诊断仿真:使用信号处理和模式识别技术,模拟电机故障的检测和诊断。
9. 电机噪声仿真:通过建立电机的声学模型,分析电机噪声产生的原因和控制方法。
10. 无感传感器控制的无刷直流电机仿真:通过仿真实现无感传感器控制的无刷直流电机的速度和位置控制。
11. 非线性电机控制仿真:研究非线性电机的控制问题,并提供相应的解决方案。
12. 电机的电磁干扰仿真:分析电机工作时对其他电子设备造成的电磁干扰,并提供抑制措施。
13. 电机振动分析仿真:通过建立电机的振动模型,分析振动的原因和控制方法。
14. 电机轴承寿命仿真:通过建立电机轴承的寿命模型,预测电机轴承的使用寿命。
15. 电机的能量回收仿真:研究电机能量回收技术,在制动或减速过程中将电机生成的能量回收到电网中。
16. 电机齿轮传动仿真:分析电机齿轮传动系统的动力学性能和传动特性。
17. 多电机系统仿真:模拟多电机系统的协同工作,包括电机之间的通信和同步控制。
18. 电机启动过电流仿真:分析电机启动过程中的过电流现象,并提供相应的限流解决方案。
运动控制MATLABsimulink实验报告

运动控制MATLAB----SIMULINK仿真实验实验报告姓名:罗才宝学号:0953505008班级:09自动化时间:2014年4月25日1.单闭环直流调速系统仿真:1.1实验说明:本次试验采用PI调节的单个转速闭环直流调速系统,在保证系统稳定的前提下实现转速无静差调速。
1.2系统参数设计:系统用三相桥式全空整流电路供电的单闭环直流调速系统仿真,则Ts=0.0017s。
其中:u N=220v,I N=13.6A,n N=1480r/min,Ce=0.131v/(r/min),电流允许过载倍数 1.5λ=,Ks=76,电枢回路总电阻: 6.58R=Ω,时间常数:Tl=0.018s,Tm=0.25s,u Nm *=5v。
计算反馈转速系数:α= u Nm */ n N=5v/(1480r/min)=0.00337v/(r/min)。
1.3单闭环直流调速系统仿真过程、结果及分析:1.3.1无负载扰动时的单闭环直流调速系统仿真图:1.3.1.1系统施加阶跃信号后的输出转速结果波形图:1.3.1.2系统施加阶跃信号后的转速调节器输出结果波形图:1.3.1.3结果分析:从上述实验输出波形可以得知:该转速单闭环直流调速系统显然按典型II型系统进行设计的,转速调节器ASR采用PI调节器(传递函数/τn s),系统用PI调节器进行串联校正,牺为:W ASR(s)=K P(τn s+1)牲了系统快速性,可抗扰性能、稳态精度变好。
1.3.2加负载扰动时的单闭环直流调速系统仿真图:1.3.2.1系统施加阶跃信号后的转速调节器输出结果波形图:1.3.2.2系统施加阶跃信号后的转速调节器输出结果波形图:1.3.2.3结果分析:从上述实验输出波形可以得知:与1.3.1实验对比不难发现,在系统稳定运行时加负载扰动后,系统输出转速先出现一定程度的下降然后通过系统自行调节后恢复到给定转速,转速调节器的输出明显上升,说明外加负载扰动后,转速调节器能自行跟随同步相应,最终达到调速的目的。
使用Simulink进行无刷直流电机控制仿真

使⽤Simulink进⾏⽆刷直流电机控制仿真这段时间刚开始接触Matlab中的Simulink仿真,我就结合⾃⼰的专业,利⽤Simulink进⾏了⽆刷直流电机的仿真,因为Simulink⼯具箱⾥⾯有很多可⽤的模块,所以建模过程变得⾮常简单。
在Matlab界⾯中new->model之后,找到Simulink Library Browser,这⾥⾯有系统⾃带的很多模块,接下来我们就需要找到⾃⼰所需要的模块了,了解⽆刷直流电机的⼯作原理以后,接下来就是找到直流电源、三相逆变桥、⽆刷直流电机模型。
⽽Simulink中也有这些模型,可以直接通过搜索关键字找到它们,分别是DC Voltage Source、Universal Bridge、Permanent Magnetic Synchronous Machine。
接下来就是需要将相应的信号连接起来,如下图其中,直流端电压可以设置电压⼤⼩,逆变桥可以选择开关器件类型,我们这⾥选择Mosfet,PMSM中我们将反电势波形选择trapezoidal即梯形波,电机参数相电阻、相电感、反电势常数、极对数按实际值设置。
Universal Bridge对应如下桥式拓扑结构。
然后就是添加相应的负载Tm,这⾥可以模拟突加负载和突减负载以及任意变化的负载,通过给定⼀个函数就可以。
然后就是开关信号g,下⾯会详细介绍。
模型搭建完成后如下图。
PMSM输出端给的信号通过Bus Selector选择,我们需要使⽤的是三相霍尔信号得到相应的开关逻辑,这也是该仿真的关键所在,其中整个模型中Subsystem1就是实现开关逻辑的算法。
我们可以根据霍尔换相真值表,通过相应的逻辑门实现,但是这样搭建模型显得不灵活⽽且很累赘,并且不能模拟超前或者滞后换相。
所以我这⾥才⽤的是通过Matlab Function来实现的。
如上图,这是换相逻辑的模型,其中我采⽤的是下桥臂恒通,上桥臂PWM调制的⽅式导通Mosfet,⽬前占空⽐的给定⽅式采⽤的是常数,后续可以根据转速环进⾏PI给定。
基于Matlab_Simulink的永磁同步电机(PMSM+)矢量控制仿真(2)1
基于Matlab/Simulink的永磁同步电机(PMSM)矢量控制仿真高延荣,舒志兵,耿宏涛摘要在现代交流伺服系统中,矢量控制原理以及空间电压矢量脉宽调制(SVPWM)技术使得交流电机能够获得和直流电机相媲美的性能。
永磁同步电机(PMSM)是一个复杂耦合的非线性系统。
本文在Matlab/Simulink环境下,通过对PMSM本体、d/q坐标系向a/b/c坐标系转换等模块的建立与组合,构建了永磁同步电机控制系统仿真模型。
仿真结果证明了该系统模型的有效性。
关键词:Matlab/Simulink,永磁同步电机,电压空间矢量脉宽调制,仿真0、引言永磁同步电机(PMSM)是采用高能永磁体为转子,具有低惯性、快响应、高功率密度、低损耗、高效率等优点,成为了高精度、微进给伺服系统的最佳执行机构之一。
永磁同步电机构成的永磁交流伺服系统已经向数字化方向发展。
因此如何建立有效的仿真模型具有十分重要的意义。
对于在Matlab中进行永磁同步电机(PMSM)建模仿真方法的研究已经受到广泛关注。
本文介绍了电压空间矢量脉宽调制原理并给出了坐标变换模块、SVPWM模块以及整个PMSM闭环矢量控制仿真模型,给出了仿真模型结构图和仿真结果。
1、电压空间矢量脉宽调制原理1.1电压空间矢量电机输入三相正弦电压的最终目的是在空间产生圆形旋转磁场,从而产生恒定的电磁转矩。
直接针对这个目标,把逆变器和异步电机视为一体,按照跟踪圆形旋转磁场来控制PWM电压,这样的控制方法称为“磁链跟踪控制”,磁链的轨迹是靠电压空间矢量相加得到的,所以又称“电压空间矢量PWM控制”。
空间矢量是按电压所加绕组的空间位置来定义的。
在图1中,A、B、C分别表示在空间静止不动的电机定子三相绕组的轴线,它们在空间互差120°,三相定子相电压UA、UB、UC 分别加在三相绕组上,可以定义三个电压空间矢量UA、UB、UC,它们的方向始终在各相的轴线上,而大小则随时间按正弦规律变化,时间相位互差120°。
Matlab中的Simulink和SimMechanics做仿真
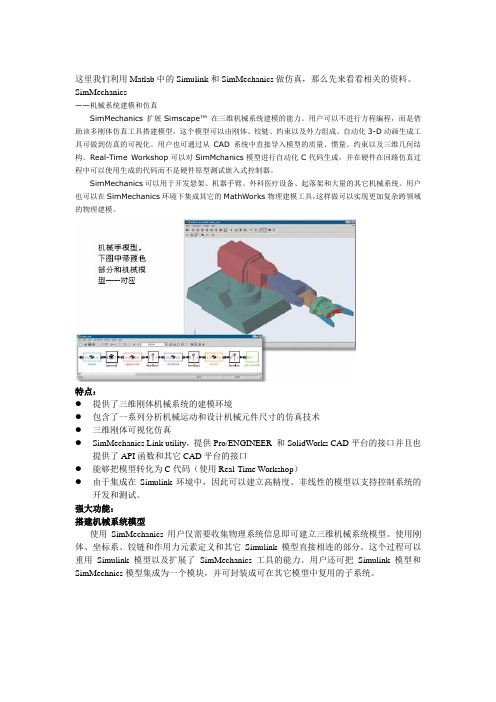
这里我们利用Matlab中的Simulink和SimMechanics做仿真,那么先来看看相关的资料。
SimMechanics——机械系统建模和仿真SimMechanics 扩展Simscape™ 在三维机械系统建模的能力。
用户可以不进行方程编程,而是借助该多刚体仿真工具搭建模型,这个模型可以由刚体、铰链、约束以及外力组成。
自动化3-D动画生成工具可做到仿真的可视化。
用户也可通过从CAD系统中直接导入模型的质量、惯量、约束以及三维几何结构。
Real-Time Workshop可以对SimMchanics模型进行自动化C代码生成,并在硬件在回路仿真过程中可以使用生成的代码而不是硬件原型测试嵌入式控制器。
SimMechanics可以用于开发悬架、机器手臂、外科医疗设备、起落架和大量的其它机械系统。
用户也可以在SimMechanics环境下集成其它的MathWorks物理建模工具,这样做可以实现更加复杂跨领域的物理建模。
特点:●提供了三维刚体机械系统的建模环境●包含了一系列分析机械运动和设计机械元件尺寸的仿真技术●三维刚体可视化仿真●SimMechanics Link utility,提供Pro/ENGINEER 和SolidWorks CAD平台的接口并且也提供了API函数和其它CAD平台的接口●能够把模型转化为C代码(使用Real-Time Workshop)●由于集成在Simulink环境中,因此可以建立高精度、非线性的模型以支持控制系统的开发和测试。
强大功能:搭建机械系统模型使用SimMechanics用户仅需要收集物理系统信息即可建立三维机械系统模型。
使用刚体、坐标系、铰链和作用力元素定义和其它Simulink模型直接相连的部分。
这个过程可以重用Simulink模型以及扩展了SimMechanics工具的能力。
用户还可把Simulink模型和SimMechnics模型集成为一个模块,并可封装成可在其它模型中复用的子系统。
山东科技大学研究生机电系统建模与仿真
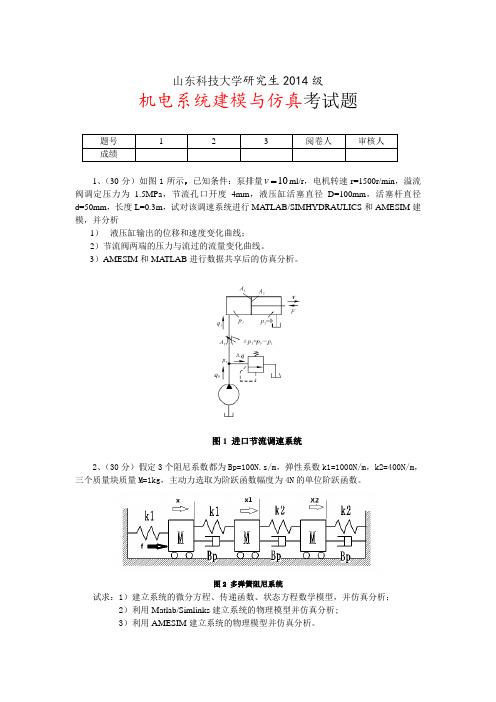
山东科技大学研究生2014级机电系统建模与仿真考试题v ml/r,电机转速r=1500r/min,溢流1、(30分)如图1所示,已知条件:泵排量10阀调定压力为 1.5MPa,节流孔口开度4mm,液压缸活塞直径D=100mm,活塞杆直径d=50mm,长度L=0.3m,试对该调速系统进行MA TLAB/SIMHYDRAULICS和AMESIM建模,并分析1)液压缸输出的位移和速度变化曲线;2)节流阀两端的压力与流过的流量变化曲线。
3)AMESIM和MA TLAB进行数据共享后的仿真分析。
图1 进口节流调速系统2、(30分)假定3个阻尼系数都为Bp=100N.s/m,弹性系数k1=1000N/m,k2=400N/m,三个质量块质量M=1kg,主动力选取为阶跃函数幅度为4N的单位阶跃函数。
图2 多弹簧阻尼系统试求:1)建立系统的微分方程、传递函数、状态方程数学模型,并仿真分析;2)利用Matlab/Simlinks建立系统的物理模型并仿真分析;3)利用AMESIM建立系统的物理模型并仿真分析。
3、(40分)考虑如图6所示的四连杆运动简图,整个铰链四杆机构的几何尺寸已在图中给出。
假设连杆AB ---沿A 轴以角速度dtd θω=旋转,假定输入为正弦信号,均质杆直径为d=0.5mm ,求:1)以θ为变量建立C 点的坐标的坐标值,试分析C 点的运动轨迹;2)按图示初始条件,利用第一代建模机构建模,试分析C 点的运动轨迹;3)利用Solidworks 进行三维建模,并形成XML 文件,输入为正弦信号,试分析C 点的运动轨迹;4)就第2步,设计一液压控制系统,在关节点A 设置转动关节驱动,试分析C 点的运动轨迹。
图3 铰链四杆机构运动简图1、独立完成,提交word 文档打印稿,电子稿发到29232718@,切莫掩耳盗铃,自欺欺人地抄袭!2、下学期末提交,原则上每位同学都必须买教材;3、提交打印稿时,需附上科大教材科购书发票复印件,新书名称:【MATLAB/Simulink 机电系统建模与仿真】,购书发票由研究生经费予以报销。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Electric Machine Analysis, Control and Verification for Mechatronics Motion Control Applications, Using New MATLAB Built-in Function and Simulink Model
1
Farhan A. Salem 1,2
Mechatronics Sec. Dept. of Mechanical Engineering, College of Engineering, Taif University, 888, Taif, Saudi Arabia 2 Alpha center for Engineering Studies and Technology Researches, Amman, Jordan Email: salem_farh@ To face the two top challenges in developing mechatronic motion control systems, particularly, the early identify ing system level problems and ensuring that all design requirements are met, as well as , to simplify and accelerate Mechatronics motion control design process including; performance analysis of a given electric DC actuator system, proper controller selection, design and overall motion system verificat ion for desired output speed or angle , We are to derive electric DC motor basic mathemat ical models, select the most applied and proper control strategies for DC motor mot ion control, with corresponding sensing devices, connect all in feedback and represent all into one general Simu link model, also, since MATLAB is a powerfu l tool that can be used in control system analysis and design, however, We are to use MATLAB programming capabilities, to design a new MATLAB built-in function, to be simple and user friendly, to co mpare different control strategies in order to choose the best control strategy that can be applied to control the output angular position, θ and speed ω of a given PMDC motor, corresponding to applied input voltage Vin to meet desired performance specifications. The designed MATLAB program can be used to analyze the response of a given PMDC that can be used in Mechatronics motion control applications e.g. robot arm or mobile robot. II. SYST EM M ODELING
Fig. 1. Schematic of a simplified motion of attached load to DC motor
Copyright © 2014 MECS
I.J. Intelligent Systems and Applications, 2014, 06, 94-108
Electric Machine Analysis, Control and Verification for Mechatronics Motion Control Applications, Using New MATLAB Built -in Function and Simulink Model
2.1 Modeling of the Permanent Magnet DC Motor A simp lified equivalent representation of DC motor's two components and application are shown in Figure 1.
95
ቤተ መጻሕፍቲ ባይዱ
The transfer function of DC motor electric co mponent relating input armature current, ia and voltage Vin , can be derived by applying Kirchoff’s law around the electrical loop by summing voltages throughout the R-L circuit, this gives (1), taking Laplace transform and rearranging gives (2):
I.J. Intelligent Systems and Applications, 2014, 06, 94-108
Published Online May 2014 in MECS (http://www.mecs /) DOI: 10.5815/ijisa.2014.06.10
I.
INT RODUCT ION
Motion control is a sub-field of control engineering, in which the position or velocity of a given machine are controlled using some type of actuating machine. The term control system design refers to the process of selecting feedback gains that meet design specifications in a closed-loop control system, most design methods are iterative, combining parameter selection with analysis, simulation, and insight into the dynamics of the plant [1][2] . The accurate control of motion is a fundamental concern in Mechatronics applications, where placing or moving an object in the exact desired location or with desired speed with the exact possible amount of force and torque at the correct exact time, while consuming minimum electric power, at minim cost, is essential for efficient system operation [3][4]. The actuating machines most used in Mechatronics motion control systems are DC machines, therefore motion control in Mechatronics applications is simplified to a DC motor motion control. DC Motor and its features can be tested and analyzed both by control system design calculation and by MATLAB software, also by using a simple microcontroller e.g. PICmicro, with corresponding control algorithm, the rotation of DC motor, that is the motion of load attached, can be controlled easily and smoothly. The main units of general motion control system are; input unit (sensor), control unit (e.g. PICmicro) and output unit and its drive (mainly DC motor).
(7)
V Vin – VR – VL EMF 0
d di Vin R ia La a Kb dt dt La s R a I s Vin s K bs s
I a (s ) 1 V in (s ) K b (s ) Las R a