机械制图3变换投影面
简述机械制图中的三视图的投影规律
简述机械制图中的三视图的投影规律
机械制图中的三视图是指制图中的仰视图、俯视图和侧视图,结合在一起能够
囊括几何图形的完整信息,是机械工程制图的重要基础。
根据图形造型大小及图形相对关系制图的过程,空间平面图形可以投射到水平面、垂直面以及斜面,将各视图投影在三个不相干的平面上,从而得到仰视图、俯视图和侧视图三种投影视图。
仰视图,它将模型统一地投射到水平面垂直于水平面的上方的一个新面。
仰视
图投影,把造型中的垂直元件变成线段,水平元件变成点,水平面变成直线,物体在此面上看起来像是从上方望下看一样,所以称作仰视图。
俯视图,它将模型统一地投射到水平面墙面相对面上,俯视图投影后,所有垂
直元件变成点,水平元件变成线段,斜面变成点和线段的集合,物体在此面上看起来像是从下方望上看一样,所以称俯视图。
侧视图,它将模型统一地投射到水平面的左右,侧视图投影后,水平面变成点,斜面变成直线,物体在此面上看起来像是从侧面望去的一样,所以称作侧视图。
因此,机械制图中的三视图的投影规律是:仰视图投影将垂直元件变成线段,
水平元件变成点,水平面变成直线;俯视图投影将垂直元件变成点,水平元件变成线段,斜面变成点和线段的集合;侧视图投影将水平面变成点,斜面变成直线。
三视图是机械工程制图的核心技术,需要把握投影规律。
理解三视图的投影规律,便能根据投影原理对对象的造型参数准确的表达出来。
正确的三视图投影可以使得工程师更准确地表达产品外观造型,关键是需要准确地把握投影中的规律和要点。
机械制图的常用投影方法

机械制图的常用投影方法机械制图是机械工程领域中的基础技术之一,它可以准确地描述出零件的形状、尺寸和位置。
而投影方法是机械制图中的重要技术手段之一,它可以将三维物体的形状投影到二维纸面上,方便人们进行观察和分析。
本文将介绍三种常用的机械制图投影方法:多视图投影法、轴测投影法和剖视投影法。
一、多视图投影法多视图投影法又称为正交投影法,它是将三维物体在不同方向上进行投影,然后通过几个正交投影图来描述物体的形状和尺寸。
常见的正交投影图有主视图、俯视图和侧视图。
主视图是将物体的前侧面与观察者的视线平行投影,便于观察物体的外形和主要尺寸。
俯视图是将物体的上表面与观察者的视线平行投影,便于观察物体的上表面形状和尺寸。
侧视图是将物体的侧面与观察者的视线平行投影,便于观察物体的侧面形状和尺寸。
多视图投影法适用于物体形状复杂、尺寸表达多样的情况,可以清晰地展现物体的各个方面,是机械制图中常用的方法之一。
二、轴测投影法轴测投影法是通过虚拟的视线和投影面来描述物体的形状和尺寸。
常见的轴测投影方法有等轴测投影法、二轴测投影法和三轴测投影法。
等轴测投影法是将物体的三个主轴向空间坐标轴等角度投影,使得物体在投影面上的形状和尺寸与实际相同。
等轴测投影法适用于展示物体整体形状和空间关系,但不适用于精确表达物体的尺寸。
二轴测投影法和三轴测投影法是在等轴测投影法的基础上,通过选择性地缩放坐标轴,使物体在投影面上的形状和尺寸比例发生变化,以便更好地表达物体的尺寸。
二轴测投影法和三轴测投影法可以用于展示物体的比例关系和尺寸。
轴测投影法适用于物体形状简单、尺寸表达相对简洁的情况,可以直观地展示物体的外形和主要尺寸。
三、剖视投影法剖视投影法是通过切割物体,将其内部结构和外部形状同时展示在一个投影图上。
常见的剖视方法有全剖视投影和局部剖视投影。
全剖视投影是将物体沿任意方向切割,并将其内部结构和外部形状在同一视图上投影。
全剖视投影适用于展示物体内部构造和外部形状的关系,方便人们理解和分析物体的构造。
机械制图换面法

b’ a
b’1
B
b
X1
§3-3 求一般位置线段的实长
二、换面法
有关名词术语
新投影
新、旧、不变 投影间关系?
a’1 A
α 旧投影面
a’
旧投影
X B
α
新投影面
b’
a O
b’1
旧投影轴
新投影轴
X1
b
不变投影 不变投影面
§3-3 求一般位置线段的实长
二、换面法
1.点的一次换面
(H1 面替代H 面) 提示: H1 面---新投影面 新投影a1 旧投
实长 α
这种增设新投影面,用新投影取代原 旧投影求解的方法称为换面法。 在V/H 投影体系中,AB 为一般位置直线。 建立新投影系:
A X B b
α
a’
增设新投影面V1,使 V1⊥H ,且∥直线AB ;
b’ a O
在V1 / H 新投影体系中, AB 为投影面平行线直线。
二、换面法
1.点的一次换面
以H1 面替代H 面
V
ax1 a’ aX a
a1 Z
作图步骤: 投影规律: 1)画OX1 轴; 1)新投影与旧投影: a1 aX1 = aaX。 2)过a’ 作OX1 a‘ a1 ⊥OX1 2)新投影与不变投影:轴的垂线;; 3)在垂线上截取 a1aX1 = aaX 。
a1
H 面---旧投影面 V 面---不变投影面
§3-3 求一般位置线段的实长
二、换面法
1.点的一次换面
以H1 面替代H 面 投影规律: 1)新投影与旧投影: a1 aX1 = aaX。
2)新投影与不变投影: a‘ a1 ⊥OX1 ;
V
机械制图投影法
机械制图:三视图的第一角法和第三角法划分三视图的第一角法和第三角法划分:一、第一角投影法1.凡将物体置於第一象限内,以「视点(观察者)」→「物体」→「投影面」关系而投影视图的画法,即称为第一角法。
亦称第一象限法。
,2.第一角投影箱之展开方向,以观察者而言,为由近而远之方向翻转展开。
3.第一角法展开后之视图排列如下,以常用之三视图(前视、俯视、右侧视图)而言,其右侧视图位於前视图之左侧,俯视固则位於前视图之正下方。
二.、第三角投影法1.凡将物体置於第三象限内,以「视点(观察者)」→「投影面」→「物体」关系而投影视图的画法,即称为第三角法。
亦称第三象限法。
2.第三角投影箱之展开方向,以观察者而言,为由远而近之方向翻转展开。
3.第三角法展开后之六个视固排列如下,以常用之三视图而言,其右侧视图位於前视图之右侧,而俯视图则位於前视图之正上方。
CNS 相关规定CNS中国国家标准之象限投影符号,系将一截头圆锥之前视图与左侧视图,依投影之排列而得。
主要之区别为第一角法符号(左侧视图排在右边),而第三角法符号(左侧视图位在左边)。
对於正投影方法之使用,CNS规定第一角法或第三角法同等适用。
但在同一张图纸上不可混合使用,且须在标题概内或其他明显处绘制符号或加注「第一角法」或「第三角法」字样。
以作为读图之识别。
由於第二象限投影与第四象限投影因水平投影面旋转后与直立投影面重叠,致使投影视图线条混淆不清,增加绘固及识图不便,故不予采用。
欧洲各国盛行第一角法投影制,所以第一角法投影亦有「欧式投影制」之称呼。
例如德国(DIN)、瑞士(VSM)、法国(NF).挪威(NS)等国家使用之。
美国采用第三角投影制,故有「美式投影制」之称呼。
除美国(ANSI)外,尚盛行於美洲地区。
而中华民国(CNS)、国际标准化机构(ISO)与日本[JIS]则采第一角法及第三角两制并行。
视图之排列,应依投影原理上下左右对齐排列,不得任意更换或未依据投影方式排置。
机械制图-点、直线、平面的投影

在机械制图中,特殊位置点常用于 确定物体的形状和大小,如交点、 切点等。
03 直线投影
直线在三投影面体系中的投影
正投影
直线在正投影面上的投影 与原直线平行或重合,且 长度不变。
侧投影
直线在侧投影面上的投影 与原直线垂直,且高度不 变。
水平投影
直线在水平投影面上的投 影与原直线平行,且长度 不变。
直线上的点的投影特性
点在直线上
点的投影在直线的投影上,且与 原点在同一平面内。
点在直线外
点的投影在直线的投影外,且与 原点不在同一平面内。Leabharlann 两直线的相对位置与投影特性
平行线
两直线在正投影面上的投影平行, 且高度相等。
交叉线
两直线在正投影面上的投影相交, 且高度相等。
垂直线
两直线在正投影面上的投影垂直, 且高度相等。
机械制图-点、直线、平面的投影
目 录
• 引言 • 点投影 • 直线投影 • 平面投影 • 实际应用与案例分析 • 总结与展望
01 引言
主题简介
01
机械制图是工程领域中用于表达 和交流设计思想的一种语言,而 点、直线和平面的投影是机械制 图的基础。
02
本主题将介绍点、直线和平面在 机械制图中的投影原理和方法, 帮助读者更好地理解和应用机械 制图。
投影法概述
投影法是将三维物体转换为二维图形 的方法,是机械制图中的基本技术。
投影法分为中心投影法和平行投影法 ,其中平行投影法又分为正投影法和 斜投影法。
02 点投影
点在三投影面体系中的投影
点的三面投影
一个点在三投影面体系中分别在H面、 V面和W面上投下影子,形成三个投 影点。
机械制图中点的三面投影

机械制图中点的三面投影在机械制图中,点是最基本的图形元素,通过点可以确定各种形状的位置和大小,因此在制图中点的表示和投影都是非常重要的。
点的三面投影指的是在三个不同的投影面上分别投影同一个点的投影形象,包括正投影、侧投影和俯视投影。
本篇文章将详细介绍机械制图中点的三面投影。
正投影正投影是指将物体投影在垂直于投影平面的平面上所得到的投影图形。
在机械制图中,正投影一般采用前视图表示。
当要投影点的时候,因为点没有大小,所以可以将点看作是一条不可见线段,使其垂直于投影平面进行投影。
在前视图上,点的投影形象为一个点(因为点的大小为零)。
下图是一个点在前视图中的投影示意图:+————+| ● |+————+在投影图中,点的位置由表示该点在三维坐标系中的坐标确定。
侧投影侧投影是指将物体投影在平行于一个主投影面的平面上所得到的投影图形。
在机械制图中,侧投影一般采用左视图或右视图表示。
当要投影点的时候,将其垂直于投影平面进行投影。
在左视图上,点的投影形象为一个点(因为点的大小为零)。
下图是一个点在左视图中的投影示意图:|●|在侧投影图中,点的位置同样由表示该点在三维坐标系中的坐标确定。
俯视投影俯视投影是指将物体从上方向下投影所得到的投影图形。
在机械制图中,俯视投影一般采用上视图表示。
当要投影点的时候,将其垂直于投影平面进行投影。
在上视图上,点的投影形象为一个点(因为点的大小为零)。
下图是一个点在上视图中的投影示意图:+—● ——+| |+————+在俯视投影图中,点的位置同样由表示该点在三维坐标系中的坐标确定。
小结以上就是机械制图中点的三面投影的介绍,通过正投影、侧投影和俯视投影,可以确定一个点在三维空间中的准确位置。
在实际的机械制图中,点不仅仅是简单的点,还可以是各种图形的交点、圆心等,因此在制图中充分掌握点的三面投影是十分必要的。
《机械制图》点的三面投影

MECHANICAL DRAWING
点的投影 二、点的三面投影
1
三投影面体系的建立
2
点的三面投影
3
点的三面投影规律
4 由点的两面投影求第三投影
2
点的投影
1. 三投影面体系的建立
Z
O
Y
三投影面体系是在两投影面体系的基础上,加上一个与H面、V面都垂直的侧立投影面W(简称侧面)所组成。三个投 影面互相垂直相交,它们的交线称为投影轴。V面和H面的交线称为OX轴,H面和W面的交线称为OY轴,V面和W面的交线称 为OZ轴。三个投影轴互相垂直相交于一点O,称为原点,
a
X
ax
a
6
Z a z a
O
YW
ay
ay
YH
a a z
A ax
a
a
ay
aa X轴, a a Z轴, a a z = a ay a ax =aa y a ax = a a z
点的投影
二、点的三面投影
4、由点的两面投影求第三投影
例1:已知点A的正面与侧面投
a
影,求点A的水平投影。
X
Z a
O
YW
a
YH
规定,不可见点的重合投影加一 圆括号。
点的投影Za’Fra bibliotek例.点A在水平面上的投影可见。
b’
X
O
a” b”
YW
a(b)
YH
17
谢谢观看
Thanks for looking
7
点的投影
二、点的三面投影
Z
4、由点的两面投影求第三投影
例2.已知点A的正面与水
a
a
平面投影,求点A的侧面
机械制图投影三视图
主视图 ——体的正面投影 俯视图 ——体的水平投影 左视图 ——体的侧面投影
2.三视图之间的度量对应关系
主视俯视长相等且对正 主视左视高相等且平齐 俯视左视宽相等且对应
整理课件
宽 高
宽
三等关系
长对正 高平齐 宽相等
3
3.三视图之间的方位对应关系
上
上
左 下
右后 前 下
后 上
后
左
右
前
左
右
下 前
•主视图反映:上、下 、左、右 •俯视图反映:前、后 、左、右 •左视图反映:上、下 、前、后
⒈ 画图时一定逐个形体画,同时注意分析表面的 过渡关系,以避免多线或漏线。
⒉ 看图时切忌只抓住一个视图不放。利用封闭线 框分解形体和分析表面的相对位置关系。
整理课件
25
整理课件
26
整理课件
4
继续? 结束?
整理课件
5
3.2 基本体的三视图
常见的基本几何体
平面基本体
曲面基本体
整理课件
6
一、平面基本体
1.棱柱
⑴ 棱柱的组成
由两个底面和若干侧棱面 组成。侧棱面与侧棱面的交线 叫侧棱线,侧棱线相互平行。
⑵ 棱柱的三视图 ⑶ 棱在柱图示面位上置取时点,六棱柱
的点两的底可面见为性水规平定面:,在俯视 图中反若映由点实于所形棱在。柱的前的平后表面两面的侧都投棱 面影是是可正平见平面,面,点,所的其以投余在影四棱也个柱可侧的见棱; 面若是表平铅面面垂上的面取投,点影它与积们在聚的平成水面直平上线投, 影点都取的积点投聚的影成方也直法可线相见,同。与。六边形 的边重合。
圆的半径?
11
继续? 结束?
机械制图三视图的形成及投影规律
教学内容教学方法复习旧课投影法:用投影原理在平面上表达物体形状的方法。
中心投影法:投射线互不平行且汇交于一点的投影法。
平行投影法:投射线相互平行的投影法。
正投影法:投射线与投影面垂直的平行投影法。
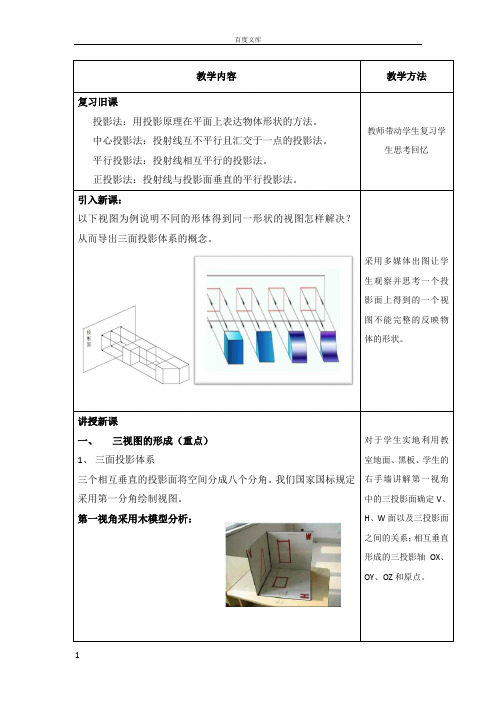
教师带动学生复习学生思考回忆引入新课:以下视图为例说明不同的形体得到同一形状的视图怎样解决?从而导出三面投影体系的概念。
采用多媒体出图让学生观察并思考一个投影面上得到的一个视图不能完整的反映物体的形状。
讲授新课一、三视图的形成(重点)1、三面投影体系三个相互垂直的投影面将空间分成八个分角。
我们国家国标规定采用第一分角绘制视图。
第一视角采用木模型分析:对于学生实地利用教室地面、黑板、学生的右手墙讲解第一视角中的三投影面确定V、H、W面以及三投影面之间的关系;相互垂直形成的三投影轴OX、OY、OZ和原点。
第一视角三投影面三个投影面:正立投影面:正对观察者的投影面(简称正面)代号为V 水平投影面:水平位置的投影面(简称水平面)代号H 侧立投影面:右边侧立的投影面(简称侧面)代号W投影轴:OX轴:正立投影面与水平面的交线。
简称X轴;OY轴:水平投影面与侧立投影面的交线。
简称Y轴;OZ轴:正立投影面与侧立投影面的交线。
简称Z轴。
原点O:X、Y、Z三轴的交点。
用O表示游戏:任务一:巧手你来做教师发布任务:每队由队长指派三名同学,分别给他们每个人一个纸板做投影面,上面有V、H、W三个字母,并同时起立。
当教师发布开始对接的的命令时,三名同学迅速将三个纸板按照三投影面体系进行对接,游戏过程中讲究快、狠、准。
哪个组完成的既快,又准就得分。
【游戏设计意图】一、游戏的方式可以活跃课堂气氛,调动学生好胜心,有利于知识的掌握二、利用游戏来演示三投影体系既新颖,能充分提高团队合作能力提问:通过刚才的热身游戏,同学们会建立三投影面体系了吗?三视图的形成 我们把我物体放在观察者与投影面体系之间,把观察者的视线看成投射线,且互相平行的垂直于各投影面进行观察既可在三个投影面上得到三视图:视图:根据国家标准的有关规定,按正投影法画出的物体图形。
机械制图第三章 基本体投影
2'
5' 3' 4' 6'
4
PW
1" 2" 5"
4"
6" 3"
y
解题步骤
1、分析两圆柱的相对位置
2、判断相贯线的已知投影 是,由已知求未知投影.
3、求出相贯线上的特殊点.
4、求出一对一般点. 5、顺次光滑地连接各 点,并且判别可见性.
6、加粗可见轮廓线。
y
1
2
PH
5 36
一、辅助平面求点法——柱与孔
5 67 4
32
8
1 10 9
P Q
〔例8 〕 完成组合立体被截切后的投影
1' 4' (5')2' (3')
3" 5"
4" 2" 1"
3 5 1 4 2
2. 求曲面立体截交线的步骤
求曲面立体截交线的步骤:
找若
确定 截切 前基 本体 形状
判断 截平 面数 量及 位置
判断 各截 平面 形状
截平 面为 曲线 图形
1. 球的投影及表面取点
球的投影及表面取点: 辅助平面法。
1'
2'
如何求?
1" 3"
(2")
投投影影 可可见见否否??
1 (2)
2. 作曲面立体投影及表面取点的注意问题
作曲面立体投影及表面取点的注意问题: (1)需要确定各投影面转向轮廓线的位置; (2)分清各条转向轮廓线在三个投影面的投影; (3)选择合适的辅助平面求点的投影。
4''
机械制图中点的三面投影讲解学习
Z
Y 相等的其它作图方法:
b’
b’’
作45° 辅助线, 使y 相等。
X
O
YW
45°
画圆弧,使y
相等。
b YH
§2-3 点的三面投影
正方形的各边相等
本节结束
§2-3 点的三面投影
90°
aX
O a”
X
aYW
O
Yw
a
90°
aY Y
a
aYH YH
§2-3 点的三面投影
二、点的投影与点的坐标的关系
1.投影面与坐标面的对应关系 2.点的投影与直角坐标的一一对应关系
ZH 面—— XOY 坐标面 W 面——YOZ 坐标面
X aX
A a
O a” aY
§2-3 点的三面投影
一、三投影面系形成和点的投影特性 二、点的投影与坐标的关系 三、点的投影作图
§2-3 点的三面投影
一、三投影面系形成的条件和点的投影特性
1.三面投影体系
Z
V
有关规定
W 面——侧立投影面 Y 轴——H、W 面的交线 Z 轴——V、W 面的交线
X
O
Y
V 、H、W 投影面应两两相互垂直
Z
作图步骤:
a’
a’’
1.画坐标轴;
10 mm
20 mm
2.求作点的投影; 3.整理作图线。
X ax
O
15 mm
10mm YW
a
aYH
YH
§2-3 点的三面投影
三、点的投影作图
例1 已知点A (15 ,10 ,20 ),求作点A 的三面投影。
Z
作图步骤:
a’
a’’
画法几何及机械制图-点的三面投影

一、三投影面系形成的条件和点的投影特性
2.点的三面投影
Z
V a’
az
符号规定
W 投影——小写字母加两撇
投影面展开
X aX A a
90°
90°
O a”
aY Y
§2-3 点的三面投影
一、三投影面系形成的条件和点的投影特性
1.点的三面投影
Z
V a’
aZ
符号规定
W 投影——小写字母加两撇
§2-3 点的三面投影
一、三投影面系形成和点的投影特性 二、点的投影与坐标的关系 三、点的投影作图
§2-3 点的三面投影
一、三投影面系形成的条件和点的投影特性
1.三面投影体系
Z
V
有关规定
W 面——侧立投影面 Y 轴——H、W 面的交线 Z 轴——V、W 面的交线
X
O
Y
V 、H、W 投影面应两两相互垂直
Z
作图步骤:
a’
a’’
1.画坐标轴;
10 mm
20 mm
2.求作点的投影; 3.整理作图线。
X ax
O
15 mm
10mm YW
a
aYH
YH
§2-3 点的三面投影
三、点的投影作图
例1 已知点A (15 ,10 ,20 ),求作点A 的三面投影。
Z
作图步骤:
a’
a’’
1.画坐标轴;
10 mm
20 mm
Z
Y 相等的其它作图方法:
b’
b’’
作45° 辅助线, 使y 相等。
X
O
YW
45°
画圆弧,使y
相等。
机械制图3直线的投影

a
V
=
A
a'1 V1
=
=
V X
ax
H
=
. ax1
a'1
X
a
H V1 X1
旧投影体系 X —VH
ax
=
ax1
a
H
X1
新投影体系 X1 —HV1
A点的两个投影:a, a
A点的两个投影:a 1,a
★新投影体系仍然遵守投影的 一般规律:
24
aa 1 X1
a'1ax1 = aax
Gong Zhuorong, Beijing Jiaotong University
“交点”是两直线上的一对重影点,可用于判别其空间位置。
16
Gong Zhuorong, Beijing Jiaotong University
交叉二直线的空间位置的判别
利用前面讲述的重影点进行判别, 到另外两个投 影上去找遮挡关系
1′
c
′
3′(4′)
●
● ●
2′
a′
X a
●4
● ●
c 3 1(2)
换H面行吗?
旧投影到旧轴的距离。
同时求出直线AB的实长及与H面的夹角α。
Of course!
27
Gong Zhuorong, Beijing Jiaotong University
2. 将投影面平行线变换成投影面垂直线
a
XV H
a
b
b
.
H X1 V1
(b'1) a●'1
V1
V
b′
a
B ●(b'1) a′1
投影的长度均比空间线段短,即都 不反映空间线段的实长。
3.机械制图第三章三投影面及三视图
下
后 左 右
前
关于方位的进一步说明(图574)
关于方位的进一步说明
从前向后看
主视图
从左向右看
左视图
从上向下看
俯视图
§3-2-3 正投影的三个特性
1.实形性(真实性): 直线或平面平行于投影面,直线的投影反映实长; 平面的投影反映其真实形状。
2.积聚性: 直线或平面垂直于投影面,直线在投影面上的投影 积聚为一个点;平面的投影积聚为一条直线。
上 左
Z
右
W 左视图
上 后 下 前
X
下
YW
H 俯视图
后
左 前
右
YH
物体左右间的距离称为“长”,上下间的距离称为 “高”,前后间 的距离称为“宽”。二维的平面图形只反映两个方向的尺寸,从图中可 以看出,主视图反映物体的长度和高度;俯视图反映物体的长度和宽度; 左视图反映物体的高度和宽度。 物体不仅有长、宽、高三个方向的尺寸,还有上、下、左、右、前、 后六个方位。主视图反映上、下、左、右四个方位;俯视图反映左、右、 前、后四个方位;左视图反映上、下、前、后四个方位。
左 下 H 俯视图 后 左 前
右
后 下
前
右
零件的三视图画法(图354)
V 主视图 上 左 右 后 W 左视图
上
前
下 H 俯视图
后
下
左
右
前
注意
作图时,从反应实形和形状特征明显的视图画起!
零件的三视图画法(图353)
V 主视图 上 W 左视图 上
左 下 H 俯视图 后
右
后 下
前
左 前
右
零件的三视图画法(图352)
§3-2 三投影面体系及三视图
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第22页/共40页
[例3-1] 求点C到直线AB的距离(如图3-10a所示)。
第23页/共40页
第24页/共40页
第25页/共40页
分析:点到直线的距离就是点到直线 的垂线实长。如图3-10b所示,为便于作图, 可先将直线AB变换为投影面平行线,然后 利用直角投影定理从点C先直线AB作垂线, 得垂足K,再求出CK实长。
第7页/共40页
由上可知,在投影变换时,点在新,旧两投影体系 中的投影之间具有下列的关系: (1)由于两投影体系V/H和V1/H具有公共的H面,因此,点 到H面的距离(即Z坐标)在两个投影面体系中是相等的, 即a′aX = a1′aX1=Aa。 (2)在新投影体系V1/H中,a a1′⊥X1轴。
第8页/共40页
第31页/共40页
第32页/共40页
[例3-2] 求侧平线EF与△ABC的交点K,如图3-14a所示。
第33页/共40页
分析:求直线与平面的交点,可以利用换面 法将△ABC变换为投影面的垂直面(即将平面变 换为直线),这样在H1面中△ABC变换为直线, 形成直线与直线相交,然后根据点的共有性和从 属性求出直线EF与△ABC的交点。
第26页/共40页
3.4平面的投影变换
将一般位置平面变换为投影面垂直面 要将一般位置平面变换为投影面垂直面,只 要能作出既垂直于原投影体系中一个投影面,又垂 直于空间一般位置平面的新投影面,则空间一般位 置平面即为该新投影面的垂直面了。
第27页/共40页
第28页/共40页
3.4.2将投影面垂直面变换为投影面平行面
第18页/共40页
第19页/共40页
通过上述一次投影变换,将正平线变换为了投 影面的铅垂线;
同理,也可以通过一次投影变换将水平线变换 为投影面的正垂线。
第20页/共40页
3.3.3将一般位置直线变换为投影面垂直线
要使一般位置直线直接垂直于投影面,必 须经过二次投影变换才能实现。也就是将上述两 种情况综合,即第一次将一般位置直线变换为投 影面的平行线,第二次将变换后的投影面平行线 变换为投影面的垂直线。
第3页/共40页
3.1 变换投影面法的基本概念
在两投影体系中,保持空间几何元素的位置不动,用 新的投影面来代替某一旧的投影面,保留原有的另一投影 面不动,新投影面垂直于被保留的投影面,使空间几何元 素对新投影面的相对位置变成有利于解题的特殊位置(垂 直或平行),然后求出其在新投影面上的投影。这种方法 称为变换投影面法,简称换面法。
2. 保留V面换H面
第9页/共40页
可见:保持V面不动,用新投影面H1代替旧投影面H (H1⊥V),形成新的投影体系H1/V。按上面的方法求出点a 的新投影a1。由于两投影体系V/H和V/H1具有公共的V面,所 以,也有下列关系: (1)aaX = a1aX1=Aa′。 (2)a′a1⊥X1轴。
第12页/共40页
必须指出,在变换投影面时,每次新投影面 的选择必须符合前面所述的两个条件;而且不能 一次变换两个投影面,必须在变换完一个投影面 之后再依次交替变换另一个投影面。即在第二次 换面时,以第一次换面得到的X1轴为旧轴,再变 换另一个投影面,如V/H→V1/H→V1/H2(先换V 面,再换H面),V/H→V/H1 →V2/H1(先换H面, 再换V面)。
第10页/共40页
根据上述点的一次投影变换,可以得出以下点的投影变 换规律: (1)点的新投影到新轴的距离等于被变换的点的旧投影到旧 轴的距离。 (2)点的新投影与点的不变的投影之间的连线始终垂直于新 轴。
第11页/共40页
3.2.2 点的二次变换
在解决实际问题时,有时变换一次投影面还不 能解决问题,必须连续的变换两次或多次投影面。
当几何元素对于投影面处于一般位置时,不能从投影 上直接反映真实形状、度量和定位关系,如图示。
不反映实形
第1页/共40页不反映来自直关系但当它们和投影面上处于特殊位置时,它们在投影面上的 投影就可以直接地反映实形、度量关系和定位关系。
水平投影反映实形
反映垂直关系
第2页/共40页
由此可见,如果把几何元素由一般位置变换成特 殊位置,它们的投影就有了特殊性(反映实形或具有 积聚性),即可方便的求解问题了。
第4页/共40页
换面法的基本原理:
第5页/共40页
用换面法时,新投影面的选择应当符号下列两个条件: (1)新投影面必须处在使空间几何元素有利于解题的位置。 (2)新投影面必须垂直于被保留的投影面,以构成新的投 影体系。
第6页/共40页
3.2点的投影变换
3.2.1点的一次变换 1. 保留H面换V面
第13页/共40页
3.3 直线的投影变换
直线的投影变换,是由直线上任意两点的投影 变换来实现的。
变换后直线新投影,就是直线上两个点变换后 的同面新投影的连线。
第14页/共40页
3.3.1将一般位置直线变换为投影面平行线
要使一般位置直线变为新投影面的平行线,只要 建立一个新投影面,使其平行于该一般位置直线且垂 直于原投影体系中的一个投影面,经过一次投影变换 就可实现。
第15页/共40页
第16页/共40页
同理,变换H面可以得到投影面的水 平线及空间直线AB对V 面的夹角β。
由此可知,一般位置直线经过一次投 影变换就变成新投影面的平行线,即可求 得它的实长及其对保留不变投影面的倾角。
第17页/共40页
3.3.2将投影面平行线变换为投影面垂直线
因为与投影面平行线相互垂直的平面一定垂直 于该直线所平行的投影面。所以,要使投影面的平 行线变换为投影面的垂直线,只要建立一个垂直于 该直线又垂直于原投影体系中一个投影面的新投影 面即可。该直线在新投影面上的投影必积聚成一点, 经一次变换即可实现。
将投影面垂直面变换为投影面平行面,只要作一 新投影面平行于已知的垂直面即可。通过一次变换就可以 实现投影面垂直面变换为新投影面的平行面。
第29页/共40页
第30页/共40页
3.4.3将一般位置平面变换为投影面平行面
由前两种变换可知,要将一般位置平面变换为新投影 面的平行面,必须经二次变换才能实现,即第一次将一般 位置平面变换成投影面垂直面,第二次将变换后的投影面 垂直面变换为投影面平行面。