A定位器调试步骤
智能定位器调试步骤
智能定位器调试步骤1.接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求,供气压力范围是—.请不要超过这个范围使用。
2.接通4—20mA输入信号。
(定位器的工作电压取自输入信号,由DCS二线制供电,不能将直流24V直接加至否则有可能损坏定位器定位器电路)。
3.检查位置反馈杆的机械安装,拆下气缸锁定螺丝,并检查气源管路防止漏气。
4.手动方式检查执行机构动作:(1)在运行模式下,按住Enter键6秒,直至屏幕显示AUTOD CAL;(2)按DOWN键或UP键,切换屏幕显示MANUAL;(3)按下Enter键,进入手动模式,屏幕显示*MA xxx,其中xxx为手动设定指令,可使用键盘操作执行机构动作;(4)按下UP或DOWN可以手动控制气功慢速动作,按住ENTER同时按下UP 或DOWN可以手动控制气功快速动作,手动操作无误后,按ESC退出手动操作模式(5)手动操作时,检查气缸的开关位置是否到位,动作速度是否正常,定位器及管路是否有漏气。
5.进入自动整定:(1)在运行模式下,按住Enter 键6 S ,直至屏幕显示 [ AUTO CAL ]。
(2)按下Enter 键,屏幕显示 [ AUTO 01](3)按DOWN 键或 UP 键,切换屏幕显示 [ AUTO 02](4)按下Enter 键,定位器开始自动整定,整定结束后屏幕显示[ COMPLETE ],并自动保存退出至运行模式下。
6.如阀门动作方向与输入信号相反,则需要正反作用:(1)在运行模式下,按住Enter 键6 S ,直至屏幕显示 [ AUTO CAL ](2)按DOWN 键或 UP 键切换,直至屏幕显示 [ VALVE ](3)按 Enter 键,进入菜单项,屏幕显示 [ ACT](4)按Enter 键,屏幕显示 [*ACT ](5)按DOWN 键或 UP 键切换正反作用,并按 Enter 键确认保存,(屏幕显示为正作用 [+ACT RA ] 或反作用[+ACT DA ])7.如定位器屏幕显示与风门开度相反,则需要切换正反开度显示:(1)在运行模式下,按住Enter 键6 S ,直至屏幕显示 [ AUTO CAL ] (2)按DOWN 键或 UP 键切换,直至屏幕显示 [ VAEW ](3)按 Enter 键,进入菜单项,屏幕显示 [ YT 2500L ] 或 [ YT 2500R ](4)按DOWN 键或 UP 键切换,直至屏幕显示 [ VW ](5)按DOWN 键,屏幕显示 [* VW ](6)按DOWN 键或 UP 键切换正反方向开度显示,并按 Enter 键确认保存,(屏幕显示为正作用 [+ VW NOR ] 正方向显示或反方向显示[+ VWREV ])智能定位器程序功能图解1.功能模式:运行模式:即定位器远方操作模式,定位器接受远方操作信号来控制气功动作,并在屏幕上显示RUN。
定位器操作规程
定位器操作规程1. 引言定位器是一种常用于定位和导航目标位置的工具。
本文档旨在描述定位器的操作规程,帮助用户正确使用定位器,提高工作效率。
2. 术语定义•定位器:一种用于确定目标位置的工具。
•目标位置:用户期望定位器指示的位置。
•操作人员:使用定位器的个人或团体。
•定位误差:定位器测量结果与实际目标位置之间的差距。
3. 安全注意事项在操作定位器之前,请确保遵守以下安全注意事项:•熟悉并遵守定位器的操作手册和使用指南。
•使用合适的个人防护装备,如手套和护目镜。
•在使用定位器时保持注意力集中,避免分心或操作过程中的随意行为。
•遵守现场安全规定,确保周围环境安全。
4. 操作步骤步骤1:准备工作在开始操作定位器之前,进行以下准备工作:1.确保定位器电源正常并已充电。
2.检查定位器的各个部件是否完好无损。
3.将定位器放置在稳定的平面上,并确保其能够自由移动。
步骤2:选择目标位置通过以下步骤选择目标位置:1.使用定位器的显示屏或按钮选择目标位置模式。
2.根据实际需求输入或选择目标位置的相关信息,如坐标、距离或方向等。
步骤3:启动定位器按照以下步骤启动定位器:1.按下定位器的启动按钮或开关,使定位器开始工作。
2.确保定位器的各个部件运作正常,如传感器、指示灯等。
步骤4:定位目标位置通过以下步骤定位目标位置:1.按照定位器的指示,移动定位器并接近目标位置。
2.观察定位器的显示屏或指示灯,根据指示调整移动方向和速度。
3.靠近目标位置时,适当减速并小心调整位置,以消除定位误差。
4.当定位器指示目标位置时,确认位置准确性并停止移动。
步骤5:记录测量结果在定位目标位置后,进行以下记录工作:1.使用定位器的记录功能,将测量结果保存或导出。
2.在相关文件或系统中记录测量结果,并添加必要的标识或注释。
5. 故障排除在操作定位器过程中,可能会遇到一些故障或问题。
以下是常见故障的排除方法:1.如果定位器无法正常启动,请检查电池或电源连接是否良好,并尝试重新启动。
常见十二种定位器,调试步骤
常见十二种定位器,调试步骤阀门定位器是控制阀的主要附件,它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
本文重点讲解常见定位器调试步骤,帮助仪表人轻松掌握各类定位器。
一阀门定位器的原理、作用阀门定位器是控制阀的主要附件。
它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。
该控制系统的操纵变量是阀门定位器去执行机构的输出信号。
(1)用于对调节质量要求高的重要调节系统,以提高调节阀的定位精确及可靠性。
(2)用于阀门两端压差大(△p>1MPa)的场合。
通过提高气源压力增大执行机构的输出力,以克服液体对阀芯产生的不平衡力,减小行程误差。
(3)当被调介质为高温、高压、低温、有毒、易燃、易爆时,为了防止对外泄漏,往往将填料压得很紧,因此阀杆与填料间的摩擦力较大,此时用定位器可克服时滞。
(4)被调介质为粘性流体或含有固体悬浮物时,用定位器可以克服介质对阀杆移动的阻力。
(5)用于大口径(Dg>100mm)的调节阀,以增大执行机构的输出推力。
(6)当调节器与执行器距离在60m以上时,用定位器可克服控制信号的传递滞后,改善阀门的动作反应速度。
(7)用来改善调节阀的流量特性。
(8)一个调节器控制两个执行器实行分程控制时,可用两个定位器,分别接受低输入信号和高输入信号,则一个执行器低程动作,另一个高程动作,即构成了分程调节。
二阀门定位器的分类1、阀门定位器按输入信号分为气动阀门定位器、电-气阀门定位器和智能阀门定位器。
(1)气动阀门定位器的输入信号是标准气信号,例如,20~100kPa气信号,其输出信号也是标准的气信号。
A定位器调校步骤
ABB定位器调校步骤1.调校步骤2.1接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求;2.2接通4~20mA输入信号;定位器的工作电源取自输入信号;2.3检查位置反馈杆的安装角度:2.3.1按住MODE键;2.3.2并同时点击↑或者↓键,直到操作模式代码显示出来;2.3.3松开MODE 键;2.3.4使用↑或者↓键操作,使执行器分别运行到两个终端位置,会分别显示终端位置的角度,记录两终端角度2.3.5两个终端位置的反馈杆的安装角度应符合下列推荐角度范围:直行程应用范围在-28°------+28°之内;角行程应用范围在-57°------+57°之内;全行程角度应不小于25°2.3.6如果角度不在上述范围之内,将执行器先运行到一个终端位置,松开反馈杆上的连接螺丝,调整反馈杆的安装角度,从显示屏上观察,达到要求角度后紧固连接螺丝,然后操作执行器运行到另一个终端位置,检测角度,如果不符则依上述方法调整;反复调整两个终端位置的角度直到满足要求为止;2.4切换至配置功能级2.4.1同时按住↑或者↓键2.4.2点击ENTER键2.4.3等待3秒钟,计数器从3计数到02.4.4↑或者↓键程序自动进入配置栏;2.5使用↑或者↓键选择定位器安装形式为直行程或角行程角行程安装形式:定位器没有反馈杆,其反馈轴与执行器角位移输出轴同轴心,一般角位移为90°,如用于蝶阀,球阀的双气缸执行器直行程安装形式:定位器必须通过反馈杆驱动定位器的转动轴,一般定位器的角位移小于60°,用于驱动直行程阀门气动执行器;我厂采用的ABB执行器为直行程安装形式,在参数里面选择:LINEARC直行程2.6启动自动调整程序:2.6.1按住MODE键;2.6.2并同时点击↑键一次或多次,直到显示出“P1.1”;2.6.3松开MODE键;2.6.4按住ENTER键3秒直到计数器倒计数到02.6.5松开ENTER键,自动调整程序开始运行;2.6.7 自动调整顺利结束后显示器显示“COMPLETE”,点击一下ENTER表示确认;在自动调整过程中如果遇到故障,程序将被迫终止并显示出故障代码,根据故障代码即可检查出故障原因;也可以人为的强制中断自动调整程序2.7如有必要,进入“P1.2”调整控制偏差带死区2.8如有必要,进入“P1.3”测试设定效果;2.9存储设定结果:2.9.1按住MODE键;2.9.2并同时点击↑键一次或多次,直到显示出“P1.4”;2.9.3松开MODE键;2.9.4用↑或者↓键选择NV_SAVE若选择“CANCEL”,此前所做修改不予存储2.9.5按住ENTER键3秒直到计数器倒计数到0然后松开;前面所进行的设定和自动调整中所测得的参数将存储在EEPROM中,定位器转换到先前所选择的运行级操作模式;1.10运行级操作模式的选择模式:自适应控制模式1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“CTRL_ADP”;3.松开MODE键;4.显示器显示阀位百分数,如“50% POSITION”模式:固定控制模式1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“CTRL_FIX”;3.松开MODE键;4.显示器显示阀位百分数,如“50% POSITION”模式:在执行器的实际全行程范围内手动控制1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“MANUAL”;3.松开MODE键;4.使用↑或者↓键可从现场手动操作执行器;模式:用于检测位移范围是否合适1.按住MODE键;2.并同时点击↑键一次或多次,直到显示出“MAN_SENS”;一般情况下选择模式实现远程控制,只有在执行器实际行程非常小执行器速度太快,控制发生震荡时选择控制模式,但其控制精度较低;模式和模式均可以用↑或者↓键操作执行器,但模式专用于手操,而模式专用于检测定位器反馈杆实际运行范围是否超出传感器的最大检测范围,以便于校正反馈杆的连接,取得最佳控制效果;2.11系统调校:给定位器输入4~20mADC的控制信号,执行机构应从全关到全开位,位置变送器应送出4~20mADC信号,然后至少取5点包括零点和满量程进行校验,在失去气源压力、电源、控制信号时,执行机构应保持不动;。
常见十二种定位器调试步骤
常见十二种定位器调试步骤在软件开发过程中,定位器是一种重要的工具,用于跟踪和解决软件中的错误和异常。
下面是常见的十二种定位器以及调试步骤:1.编译器错误定位器:当编译器发现语法错误时,会输出错误信息,包括行号和具体错误信息,帮助开发人员快速定位并修复错误。
2.日志定位器:通过在代码中插入日志语句,记录程序在运行过程中的状态和变量值,可以帮助开发人员定位和分析问题。
3.断言定位器:断言是一种用于验证程序运行状态的机制。
通过在代码中插入断言语句,可以检查程序的假设是否成立,如果断言失败,就会触发异常,帮助开发人员快速发现问题。
4.异常处理定位器:在代码中使用异常处理机制可以捕获和处理程序中的异常情况,通过异常的栈追踪信息可以定位到异常发生的位置。
5.函数跟踪定位器:通过在代码中添加函数调用追踪,可以记录函数的调用关系,帮助开发人员定位问题所在。
6.内存调试定位器:在开发过程中,内存泄漏和内存溢出是常见的问题。
通过使用内存调试工具,可以分析程序的内存使用情况,并定位到内存泄漏和溢出的位置。
7.单步调试定位器:通过使用调试工具,在代码中设置断点,可以逐步执行程序并观察程序的状态和变量值,帮助开发人员定位问题。
8.检查点定位器:在关键代码位置插入检查点,用于验证程序的正确性。
如果程序执行到检查点时发生错误,可以确定问题所在。
9.运行时检查定位器:通过在代码中插入运行时检查语句,可以检查程序运行过程中的错误情况,帮助开发人员定位和解决问题。
10.性能分析定位器:在开发过程中,程序的性能可能成为一个问题。
通过使用性能分析工具,可以分析程序的性能瓶颈,并进行优化。
11.远程调试定位器:在分布式系统中,如果出现错误和异常,需要使用远程调试工具来定位和解决问题。
12.单元测试定位器:通过编写单元测试用例,可以验证程序的正确性。
如果单元测试失败,可以确定问题所在。
调试步骤如下:1.重现问题:首先,开发人员需要尝试重现问题,确定问题所在,并在相同的环境和条件下进行调试。
abb定位器调节方法
ABB智能定位器调试及注意事项:打开定位器气源门。
2、向定位器提供4—20MA输入信号(端子为+11,-12)。
3、检查:(1)按下并保持MODE(2)另外短暂按下↑或↓,直到出现MODE 1.3(手动调整)(3)释放MODE(4)按下↑或↓,使执行器开关至其机械限位,并记录数值,角行程执行机构显示旋转角度。
建议限位位置:直行程执行机构>-28°并<+28°;角行程执行机构>-57°并<+57°。
最小角度为25°。
4、切换至组态模式:(1)同时按下并保持↑和↓(2)另外短暂按下ENTER(3)等待一会儿,直到3秒倒计时完成(4)释放↑和↓设备将自动返回到参数组P1._。
注意:PX.Y调节方法(同时按下并保持MODE和ENTER并保持;用↑或↓调节X / 按下并保持MODE;用↑或↓调节Y)5、选择(用↑和↓)参数P1.0 ACTUATOR/定义定位器安装形式角行程ROTARY或直行程LINEAR。
参数P2.3 ACTION/设定阀门正反作用方式反作用(REVERSE) 4~20MA对应开度100~0%或正作用(DIRECT) 4~20MA对应开度0~100%参数P3.2 ZERO_POS/起始点方向设置<预设为全关即反馈杆逆时针方向>顺时针方向关闭CLOCKW或逆时针方向关闭CTCLOCKW。
注意:以上设置必须在自动调整之前完成(即第6步)。
6、启动自动调整功能:(1)同时按下并保持MODE和ENTER(或按下并保持MODE)(2)另外短暂按下↑或↓,直到P1.1显示出来(3)释放MODE(4)按下ENTER并一直按着直到倒计时结束(5)释放ENTER,自动调整功能启动。
(6)如果显示COMPLETE,则表示“自动调整”成功,快速按下ENTER确认。
也有可能因为某种故障“自动调整”被自动取消,同时显示错误信息。
(CLOCKRUN 10 表示超程,需重调反馈杆)7、调整容许区域(tolerance band)(仅仅对于特殊用途的执行机构,比如特别小的执行机构)。
定位器调校方法
梅索尼兰调节阀调试方法:将HART375 手操器连到阀门定位器上后,启动HART375 进入MANUAL 模式→Calibration Menu→Tuning→AutoTune,然后定位器开始自检,待自检完毕后,退出Calibration Menu 模式,进入Normal 模式即可。
下面举出几个具体列子:1. 阀门反馈不正常解决方法:启动HART→进入MANUAL 模式→Calibration Menu→Range→Autostops 运行结束后,退出Calibration Menu 模式,进入Normal 模式即可2. 阀门波动大解决方法:启动HART→进入MANUAL 模式→Calibration Menu→Tuning→PID coefficient 选2 次OK→选择一次entet→将I 值相应放大→选择enter7 次后再选择一次OK,修改I 参数完成.运行结束后,退出Calibration Menu 模式,进入Normal 模式即可3. 零位或满位偏差大解决方法:启动HART→进入MANUAL 模式→Calibration Menu→Range→Autostops 运行结束后,退出Calibration Menu 模式,进入Normal 模式即可4.阀门不动作从以下几个方面检查: 1) 检查阀门是否送电,是否有气源和指令线是否有问题2) 有手动装置的阀门检查是否阀门在手动位置3)是否用HART375 调试时打到MANUAL 模式,调试结束后未返回Normal 模式FISHER 调节阀调试方法:在调试之前首先确认阀门的Travel值(阀体上的标牌上有标注,比如1/4,3/4 等) ,且使阀门处于初始状态(即全开或全关,根据阀门是气开阀还是气关阀而定) ,然后将定位器外壳螺丝松开, 打开外壳取出里面的黑色小圆棒将小圆棒穿过定位器与阀杆连接部分后卡在定位器边上的小孔上,将连接部分可移动的杆放在与阀门Travel 值对应的位置上固定即可,将信号源和HART连接到定位器后,启动HART,选择0(当位置反馈装置是Tri-Loop 时) 或定位器的型号(4210 型位置反馈装置)→Setup&Diag→Detailed Setup→Mode→Instrument Mode→Out of service(注意:此项再调试完毕后要返回到In service)→返回Basic Setup→ Auto Setup→Auto Calib Travel→Manual(注意:此处有一个选择交叉点的过程,当在交叉点的时候,要求阀杆与定位器连接部分标有Travel 值的空档处处在水平位置)→Analog→In serviceFISHER 调节阀位置反馈装置调试方法:1. 就地安装的4210型位置反馈装置,首先用信号源加12mA 的信号, 使阀门开度在50%, 用万用表量电路板上的TP3 和TP4 的电压,要求当位置反馈装置与阀杆连接处的横档在水平位置时,二者之间的电压是1.25V,若不是则进行调整.然后用信号源加4mA信号,量TP1 和TP2之间的电流,看反馈是4mA 还是20mA,如果是一个接近4mA的数就调整调零旋钮,使反馈的信号为4mA;如果是一个接近20mA的数就调整量程旋钮使反馈的信号为20mA.同样的方法来确定当给出的信号是20mA 时反馈的信号,如此多次直至确定零位和量程2. 电子间机柜内安装的Tri-Loop 位置反馈装置将HART连接到Tri-Loop位置反馈装置的通讯连接端口上,启动HART,进入Utility→ Configure HART Application→Polling→Digital Poll,然后退出到主画面选择Online→选择定位器的型号→Setup&Diag→Detail Setup→Mode→Burst→BurstEnable→Enable→返回Burst 画面选择Burst Command→HART Univ Cmd 3→返回到主画面后选择Online→"1"(指Trip-Loop)→Device Setup→BasicSetup→Configure Channels→Configure CH1→将Burst Variable 的类型改为"QV"Units 设为,"%"LRV 设为,"0",URV 设为"100",CH1 Enabled 设为"YES"然后保存即可.瑞基调门调试方法:瑞基调门调试是使用遥控器来调试的, 使用遥控器对中液晶显示屏按"┙"输入口令"000"进入一级设定菜单, 在一级设定菜单里主要是确定阀门的开关限位, 此时可手动将阀门打到全开(或全关)位置,然后使用遥控器按"↓"选择"打开限位"(或关闭限位) ,按"┙"进入,然后确定保存即可.之后退回主菜单,进入二级设定菜单,在二级菜单下主要是设定输入信号的量程,选择进入模拟信号量程项,选择20mA;然后将阀门打到就地控制状态用信号源加一个4mA 的信号,设定为低限阀位,加20mA 信号设为高限阀位保存即可! 此外可以使用遥控器来调整阀门的力矩,开关方向,保护方式等,具体情况根据显示屏显示选项操作即可西门子定位器调试方法:1.用定位器显示窗口下方的'+'和'-'两个按键, 使执行机构运动, 看整个机构能否自由走满行程.2.让执行器运动到行程的中间位置(直行程的反馈杆处于水平位置) ,就可以进行初始化了. 注:当你按住其中一个键的同时再按另一个键可以加快执行机构的动作.3.按功能键(小手形)5 秒后就可以进行参数设置.4.SIEMENS 定位器共有36 组参数, 可以根据现场的实际情况进行设置. 用'+'和'-' 键可以在一组参数中进行选择, 选择完后可以按一下功能键进入第二组参数的设置, 若上一个参数设置有误,可以按功能键同时按'-'键,回到上一个参数再进行设置.5.在这些参数中有几个是经常用到的. 1YFCT (执行器类型) :直行程选WAY,角行程选TURN. 2YAGL (额定反馈角度) :一般情况下,直行程设置成33,角行程90. 7SDIR: 给定方向上升RISE,给定方向下降FALL 38YDIR (操作变量方向显示) :上升RISE,下降FALL 同时改变SDIR 和YDIR 这两组参数可改变执行器动作方向. 55PRST 预设置(工厂设置) :当重新调试时,先进入55 项,长按+键 5 秒,直到显示ocay,说明已经恢复到工厂设置5.开始初始化时执行器必须处于行程的中间位置.6.参数设置完毕后用功能键切换到第四个参数,显示为'4.INIT',按住'+'键约5 秒定位器就自动进行初始化了.7.初始化一共分为5 步. 1)决定动作方向. 2)检查执行机构行程和零点. 3)确定执行机构上下动作时间. 4)确定最小的定位增量. 5)最佳的瞬时响应.8.当初始化完成时屏幕上显示"FINISH"按一下功能键显示"4.INIT".9.按功能键5 秒后,当屏幕显示有变化时松手,此时定位器处于手动模式,再按一下功能键定位器处于自动模式.10.初始化结束后定位器即进入正常工作状态.。
常见十二种定位器,调试步骤
常见十二种定位器,调试步骤阀门定位器是控制阀的主要附件,它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
本文重点讲解常见定位器调试步骤,帮助仪表人轻松掌握各类定位器。
一阀门定位器的原理、作用阀门定位器是控制阀的主要附件。
它将阀杆位移信号作为输入的反馈测量信号,以控制器输出信号作为设定信号,进行比较,当两者有偏差时,改变其到执行机构的输出信号,使执行机构动作,建立了阀杆位移量与控制器输出信号之间的一一对应关系。
因此,阀门定位器组成以阀杆位移为测量信号,以控制器输出为设定信号的反馈控制系统。
该控制系统的操纵变量是阀门定位器去执行机构的输出信号。
(1)用于对调节质量要求高的重要调节系统,以提高调节阀的定位精确及可靠性。
(2)用于阀门两端压差大(△p>1MPa)的场合。
通过提高气源压力增大执行机构的输出力,以克服液体对阀芯产生的不平衡力,减小行程误差。
(3)当被调介质为高温、高压、低温、有毒、易燃、易爆时,为了防止对外泄漏,往往将填料压得很紧,因此阀杆与填料间的摩擦力较大,此时用定位器可克服时滞。
(4)被调介质为粘性流体或含有固体悬浮物时,用定位器可以克服介质对阀杆移动的阻力。
(5)用于大口径(Dg>100mm)的调节阀,以增大执行机构的输出推力。
(6)当调节器与执行器距离在60m以上时,用定位器可克服控制信号的传递滞后,改善阀门的动作反应速度。
(7)用来改善调节阀的流量特性。
(8)一个调节器控制两个执行器实行分程控制时,可用两个定位器,分别接受低输入信号和高输入信号,则一个执行器低程动作,另一个高程动作,即构成了分程调节。
二阀门定位器的分类1、阀门定位器按输入信号分为气动阀门定位器、电-气阀门定位器和智能阀门定位器。
(1)气动阀门定位器的输入信号是标准气信号,例如,20~100kPa气信号,其输出信号也是标准的气信号。
定位器操作规程
定位器操作规程定位器操作规程一、前言定位器是一种用于精确定位物体或人员位置的设备,广泛应用于物流、交通、安防等领域。
为了确保定位器的正常运行和使用安全,制定本操作规程。
二、安全要求1. 操作人员必须接受相关培训,熟悉定位器的使用方法和注意事项。
2. 操作人员应穿戴个人防护装备,如安全帽、手套等。
3. 操作人员在操作前应仔细核对设备的工作状态,如电量、信号强度等。
4. 定位器操作区域应有明确的标识,禁止未经授权的人员进入。
三、操作程序1. 打开定位器(1)按住开关键,直到屏幕亮起。
(2)核对屏幕显示的设备信息,确保无误。
(3)等待信号强度稳定,显示位置信息。
2. 定位器的固定(1)根据需要,将定位器固定在被定位物体或人员身上,确保牢固可靠。
(2)避免遮挡定位器天线,影响信号接收。
(3)避免与其他金属物体接触,避免干扰信号。
3. 定位器的查询(1)按住查询键,进入查询模式。
(2)根据屏幕显示的操作提示,选择要查询的目标。
(3)等待定位器回传位置信息,查看屏幕显示的结果。
4. 定位器的报警(1)当被定位物体或人员发生异常情况时,如移动超出指定范围、掉落等,定位器会发出报警信号。
(2)当定位器发出报警信号时,操作人员应立即核实情况并采取相应的措施。
5. 定位器的维护(1)定期检查定位器的电量情况,及时充电。
(2)定期检查定位器的固定情况,确保牢固可靠。
(3)定期检查定位器的信号强度,及时调整设备位置或采取增强信号的措施。
四、注意事项1. 定位器不得用于非法目的,如非法跟踪、监视等行为。
2. 定位器不得用于违反他人隐私的目的,如窃取他人位置信息等行为。
3. 操作人员应时刻关注定位器的工作状态,如电量、信号强度等。
4. 定位器不得用于危险环境,如易爆、易燃等场所。
5. 定位器的维护应由专人负责,定期进行检查和保养。
五、紧急处理1. 当定位器发生故障或异常情况时,操作人员应立即将设备关闭,并通知维修人员进行处理。
GPS初始点校正的操作步骤
GPS点校正求转换参数的操作步骤
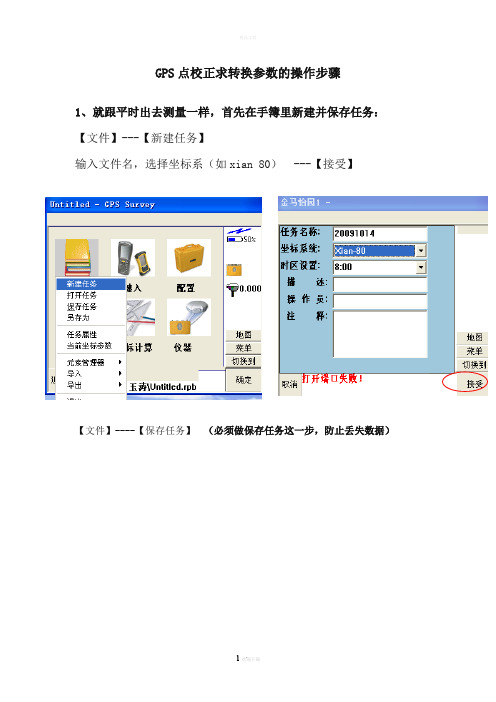
1、就跟平时出去测量一样,首先在手簿里新建并保存任务:【文件】---【新建任务】
输入文件名,选择坐标系(如xian 80) ---【接受】
【文件】----【保存任务】(必须做保存任务这一步,防止丢失数据)
2、野外采集四个已知的控制点:【测量】---【测量点】
依次去测量这四个已知的控制点
3、输入四个已知控制点的坐标:
【键入】---【点】依次输入这四个已知控制点在当地坐标系下的坐标值,每输完一个点都要点击右下角的“保存”进行数据的保存。
4、进行点校正(求转换参数):
【测量】---【点校正】
点左下角的【增加】
点击【网格点名称】下的 ----选择键入的已知控制点坐标
点击【GPS点名称】下的----选择用GPS测得的相对应的控制点。
A251和D251对应为同一个点
(如上图所示,网格点和GPS点都必须是251这个点;不能网格点选251这个点,而GPS点却选252这个点。
)
选择好后点击【确定】,如下图所示:
再点【增加】直到四个已知控制点和对应测量点都添加进去,效果如下图:
点击下面的【计算】----这里如果不点“计算”不生效
点击完“计算”后再点击【确定】,会出现下图的提示
这时再点【确定】即可。
(点校正求解转换参数的任务完成)
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
GW005A定位器使用说明书
GW005A定位器使用说明书一、产品概述二、产品特点1.GPS定位技术:采用高精度GPS定位技术,可提供准确的位置信息,误差范围仅为几米。
2.GSM/GPRS通信:通过GSM/GPRS网络,实时发送位置信息到手机或平台。
4.历史轨迹回放:可查询和回放最近的位置信息和移动轨迹。
5.电池持久续航:内置大容量锂电池,待机时间可达数天。
6.防水设计:具有防水性能,可以在户外环境中使用。
三、产品结构1.主机:包含GPS定位芯片和GSM模块,用于位置定位和通信功能。
2.SOS按钮:用于紧急求救功能。
3.电池:提供电力供应。
4.LED指示灯:用于显示设备状态。
四、使用方法1.充电:先将GW005A定位器连接到电源适配器,然后插入电源插座,通过充电线开始充电。
充电时,LED指示灯将亮起,待充电完成后,指示灯将熄灭。
2.激活:按下主机上的开关按钮,LED指示灯将闪烁,表示设备已激活。
3.定位:使用手机或终端设备发送指令到设备,设备将进行定位,并通过GPRS发送位置信息。
用户可以在手机或平台上查看设备的当前位置和历史轨迹。
5.电池续航:使用适配器进行充电,能够提供长时间的续航能力。
在低电量时,LED指示灯将会闪烁提醒需要进行充电。
五、注意事项1.定期充电:为了确保设备正常工作,请定期对设备进行充电,电池电量过低会影响设备的正常使用。
2.防水环境下的使用:GW005A定位器具有防水功能,但不能长时间浸泡在水中,以免影响其性能和寿命。
3.安全保管:请将设备放在安全的地方,避免摔落和碰撞,以免影响设备的使用寿命。
4.手机或平台设置:设备需要通过手机或平台设置才能正常工作,使用前请确保已经正确设置了相关参数。
六、常见问题及解答1.定位信息不准确怎么办?请确保设备处于开放场所,并尽量避免高楼和大型建筑物的遮挡,以确保GPS定位的准确性。
2.设备无法连接网络怎么办?请检查SIM卡是否正常插入,信号是否稳定,以及手机或平台的设置是否正确。
EaziCal定位器调校
Tyco Eazical IR Positioner阀门定位器调教步骤
一.定位器位置传感器初始角度设置
1.给定位器12mA(50%)信号
2.同时按下高位和低位按钮直至阀门运行到全开位置,此时松开按钮观察阀门
转动。
3.如果阀门按顺时针方向转动,则把选择开关(SW1)打到CW(左边)位置;
反之将选择开关(SW1)打到CCW(右边)位置。
4.如果绿色的LED闪亮,则进入第五步;如果否,则旋转主齿轮直至绿色LED
闪亮。
5.按下高位按钮直至阀门运行到全开位置,同时观察LEDs。
如果红色LED或
则黄色LED闪亮,则说明位置传感器的方向和执行机构供气管路异向,这
时需要更改选择开关的位置,返回步骤2重新调校。
6.松开高位按钮,当阀门到达关位时红色LED闪亮。
7.按下低位按钮退出位置传感器初始角度设置。
二.定位器低位调校
1.给定位器4mA(0%)信号
2.按下低位按钮直至黄色LED闪亮,然后松开按钮,定位器开始自动低位调
校。
3.当绿色LED闪亮时低位调校过程结束。
如果此时红色LED闪亮,说明低位
调校过程出现错误,返回步骤2重新调校
三.定位器高位调校
1.给定位器20mA(100%)信号
2.按下高位按钮直至黄色LED闪亮,然后松开按钮,定位器开始自动高位调
校。
3.当绿色LED闪亮时高位调校过程结束。
如果此时红色LED闪亮,说明高位
调校过程出现错误,返回步骤2重新调校
如果经过以上调校后,定位器不能在20mA全开或在4mA全关,则重新对定位器进行高位或低位调校,直至达到理想的状况。
定位器的操作方法
定位器的操作方法
定位器(Locator)是一种用于定位物体或人员位置的设备,通常由发射器和接收器两部分组成。
接下来是一般性定位器操作方法的步骤:
1. 打开定位器:根据具体型号和品牌,开启电源或按下启动键,确保设备已准备好可以工作。
2. 发射信号:根据需要,可以在要定位的物体或人员上携带发射器,然后启用发射器,开始发送信号。
有些定位器在内建的装置中已经分配好了信号源,不需要外接设备。
3. 接收信号:使用接收器,开始接收到信号。
具体操作方法不同,可以直接读取接收器上的显示屏或 LED 信号提示灯。
4. 微调定位:根据接收器显示或是 LED 信号提示,可以通过控制接收器的天线等装置,来完成对定位物体或人员的定位微调。
5. 定位关闭:完成定位后,可以将设备关掉,或是停止发射器或报告发射源。
需要注意的是,如果是在室内使用定位器,有时会受到房间内的墙壁、天花板等结构物的影响,因此可能导致信号不稳定。
也需要了解设备的电池寿命,及时充电或更换电池。
aRCAPRO定位器调试步骤
aRCAPRO定位器调试步骤1、接通气源,检查减压阀后压力是否符合执行器的铭牌参数要求(定位器的最大供气压力为7BAR,但实际供气压力必须参考执行器所容许的最大气源压力)。
2、接通4——-20mA输入信号。
(定位器的工作电源取自输入信号,由DCS二线制供电,不能将DC24V直接加至定位器,否则有可能损坏定位器电路)。
3、检查位置返馈杆的安装角度(如定位器与执行器整体供货,则已经由执行器供货商安装调试完毕,只需作检查确认,该步并非必须)按住MODE键。
并同时点击⇧或⇩键,直到操作模式代码1、3显示出来。
松开MODE键。
使用⇧或⇩键操作,使执行器分别运行到两个终端位置,记录两终端角度两个角度应符合下列推荐角度范围(最小角位移20度,无需严格对称)直行程应用范围在-28º——+28º之内。
角行程应用范围在-57º——+57º之内。
全行程角度应不小于25º。
4、切换至参数配置菜单,同时按住⇧和⇩键,点击ENTER键等待3秒钟,计数器从3计数到,松开⇧和⇩键程序自动进入P1、0配置菜单。
5、使用⇧和⇩键选择定位器安装形式为直行程或角行程。
角行程安装形式:定位器没有返馈杆,其返馈轴与执行器角位移输出轴同轴心一般角位移为90º直行程安装形式:定位器必须通过返馈杆驱动定位器的转动轴,一般定位器的返馈杆角位移小于60º,用于驱动直行程阀门气动执行器。
注意:进行自动调整之前,请确认实际安装形式是否与定位器菜单所选形式相符,因为自动调整过程中定位器对执行器行程终端的定义方法不同,且线性化校正数据库不同,易卖工控可能导致较大的非线性误差。
6、启动自动调整程序(执行器或阀门安装于系统后最好通过此程序重新整定):按住MODE键点击⇧键一次或多次,直到显示出“P1、1”松开MODE键按住ENTER键3秒直到计数器倒计数到0松开ENTER键,自动调整程序开始运行(显示器显示正在进行的程序语句号)。
智能定位器工作原理及调试方法
智能定位器工作原理及调试方法
智能定位器是一种利用无线技术进行定位的设备,其工作原理
主要包括信号发射与接收、信号处理和定位计算三个方面。
首先,智能定位器通过内置的无线发射装置向周围的基站或接
收设备发送特定的信号。
这些信号可以是无线电波、蓝牙信号或者
其他无线通讯技术所使用的信号。
接收设备接收到这些信号后,会
进行信号处理,包括信号强度的测量、信号的时延等信息的提取。
接着,接收设备会将这些信息发送给定位计算单元。
其次,定位计算单元会根据接收到的信号信息,通过三角定位、信号强度定位或者其他定位算法来计算出智能定位器的位置坐标。
这些算法可以利用多个接收设备的信号信息进行多点定位,也可以
借助预先建立的信号强度地图进行定位计算。
调试智能定位器时,首先需要确保设备的无线发射和接收功能
正常。
可以通过检查设备的天线、发射电路和接收电路来确认设备
的无线通讯功能是否正常。
其次,可以利用已知位置的参考点来测
试设备的定位精度,通过比对设备计算出的位置与真实位置之间的
差异来调整定位算法的参数,以提高定位的准确性。
另外,还可以
通过调整设备的发射功率、接收灵敏度等参数来优化定位性能。
总的来说,智能定位器的工作原理涉及无线信号的发射与接收、信号处理和定位计算,而调试方法主要包括检查设备的无线通讯功能、测试定位精度和优化定位参数等步骤。
希望这些信息能够对你
有所帮助。
西门子定位器调整步骤
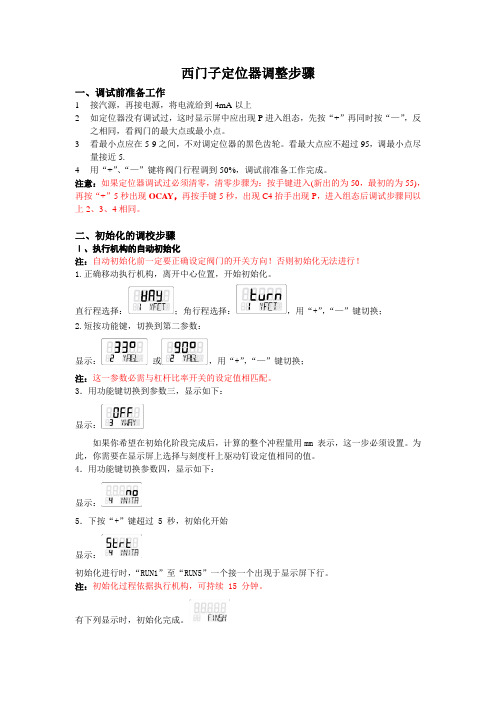
西门子定位器调整步骤一、调试前准备工作1接汽源,再接电源,将电流给到4mA以上2如定位器没有调试过,这时显示屏中应出现P进入组态,先按“+”再同时按“—”,反之相同,看阀门的最大点或最小点。
3看最小点应在5-9之间,不对调定位器的黑色齿轮。
看最大点应不超过95,调最小点尽量接近5.4用“+”、“—”键将阀门行程调到50%,调试前准备工作完成。
注意:如果定位器调试过必须清零,清零步骤为:按手键进入(新出的为50,最初的为55),再按“+”5秒出现OCAY,再按手键5秒,出现C4抬手出现P,进入组态后调试步骤同以上2、3、4相同。
二、初始化的调校步骤Ⅰ、执行机构的自动初始化注:自动初始化前一定要正确设定阀门的开关方向!否则初始化无法进行!1.正确移动执行机构,离开中心位置,开始初始化。
直行程选择:;角行程选择:,用“+”,“—”键切换;2.短按功能键,切换到第二参数:显示:或,用“+”,“—”键切换;注:这一参数必需与杠杆比率开关的设定值相匹配。
3.用功能键切换到参数三,显示如下:显示:如果你希望在初始化阶段完成后,计算的整个冲程量用mm 表示,这一步必须设置。
为此,你需要在显示屏上选择与刻度杆上驱动钉设定值相同的值。
4.用功能键切换参数四,显示如下:显示:5.下按“+”键超过 5 秒,初始化开始显示:初始化进行时,“RUN1”至“RUN5”一个接一个出现于显示屏下行。
注:初始化过程依据执行机构,可持续 15 分钟。
有下列显示时,初始化完成。
在你短促下压功能键后,出现显示:通过下按功能键超过 5 秒,退出组态方式。
约5 秒后,软键显示将出现。
松开功能键后,装置将在Manual 方式,按功能键将方式切换为AUTO,此时可以远控操作。
Ⅱ、执行器手动初始化利用这一功能,不需硬性驱动执行机构到终点位置即可进行初始化。
杆的开始和终止位置可手工设定。
初始化剩下的步骤(控制参数最佳化)如同自动初始化一样自动进行。
定位器调试步骤与方法
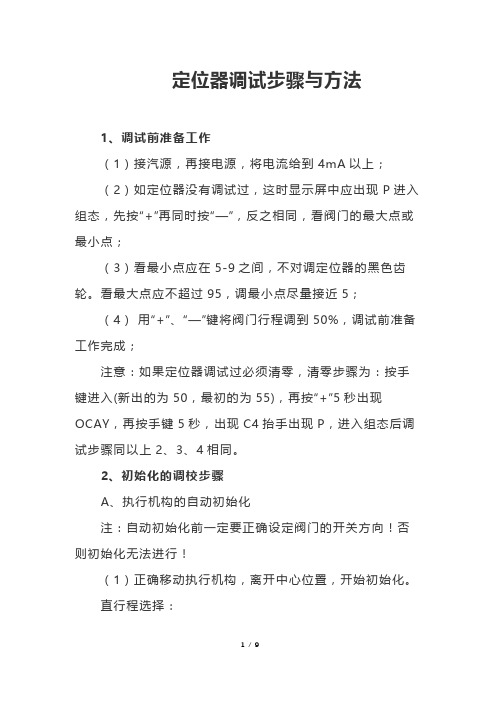
定位器调试步骤与方法1、调试前准备工作(1)接汽源,再接电源,将电流给到4mA以上;(2)如定位器没有调试过,这时显示屏中应出现P进入组态,先按“+”再同时按“—”,反之相同,看阀门的最大点或最小点;(3)看最小点应在5-9之间,不对调定位器的黑色齿轮。
看最大点应不超过95,调最小点尽量接近5;(4)用“+”、“—”键将阀门行程调到50%,调试前准备工作完成;注意:如果定位器调试过必须清零,清零步骤为:按手键进入(新出的为50,最初的为55),再按“+”5秒出现OCAY,再按手键5秒,出现C4抬手出现P,进入组态后调试步骤同以上2、3、4相同。
2、初始化的调校步骤A、执行机构的自动初始化注:自动初始化前一定要正确设定阀门的开关方向!否则初始化无法进行!(1)正确移动执行机构,离开中心位置,开始初始化。
直行程选择:角行程选择:用“+”,“—”键切换;(2)短按功能键,切换到第二参数:显示:或,用“+”,“—”键切换;注:这一参数必须与杠杆比率开关的设定值相匹配。
(3)用功能键切换到参数三,显示如下:如果你希望在初始化阶段完成后,计算的整个冲程量用mm 表示,这一步必须设置。
为此,你需要在显示屏上选择与刻度杆上驱动钉设定值相同的值。
(4)用功能键切换参数四,显示如下:(5)下按“+”键超过 5 秒,初始化开始:初始化进行时,“RUN1”至“RUN5”一个接一个出现于显示屏下行。
注:初始化过程依据执行机构,可持续15 分钟。
有下列显示时,初始化完成。
在你短促下压功能键后,出现显示:通过下按功能键超过 5 秒,退出组态方式。
约5 秒后,软键显示将出现。
松开功能键后,装置将在Manual 方式,按功能键将方式切换为AUTO,此时可以远控操作。
B、执行器手动初始化利用这一功能,不需硬性驱动执行机构到终点位置即可进行初始化。
杆的开始和终止位置可手工设定。
初始化剩下的步骤(控制参数最佳化)如同自动初始化一样自动进行。
ABB定位器调校步骤
ABB定位器调校步骤步骤一:准备工作1.1检查机器人系统和工作环境,确保所有安全措施和防护设备已经启用。
1.2确保机器人和控制系统已经正确连接,并且机器人能够正常工作。
1.3确保机器人上安装的定位器和其他相关设备处于正常状态,并且没有损坏或松动。
步骤二:初始化机器人2.1打开ABB机器人控制系统,并确保机器人系统处于待机状态。
2.2进入ABB机器人控制系统的专用调校程序,并选择定位器调校模式。
步骤三:设置调校参数3.1在调校程序界面上输入相关参数,包括机器人的位置、姿态、姿态姿势和其他调校参数。
3.2根据实际需要设置定位器的精度和灵敏度参数。
步骤四:执行定位器调校4.1调整机器人的姿势和姿势姿势,使其与预定的位置和姿势完全吻合。
4.2通过调整机器人的位置和姿势,进行微调,以便定位器能够准确地读取和显示目标位置和姿势。
4.3对定位器进行校准,以确保机器人在工作时能够准确地定位和执行任务。
步骤五:验证定位器调校结果5.1使用校准后的定位器进行工作,观察机器人是否能够准确地定位和执行任务。
5.2如果发现机器人在工作中出现定位错误或执行不准确的情况,需要重新进行定位器调校。
步骤六:保存调校结果6.1将调校后的参数和数据保存到机器人控制系统的数据库中。
6.2对于多台机器人系统,需要为每台机器人保存独立的调校结果。
步骤七:定期检查和维护7.1定期检查机器人系统和定位器的状态,确保其正常运行。
7.2定期校准定位器,以确保机器人在工作中保持准确的定位和执行能力。
7.3对于长时间未使用的机器人系统,需要重新进行调校和校准,以恢复其准确的定位和执行能力。
总结:以上是ABB定位器调校的详细步骤。
定位器是机器人系统中非常重要的组成部分,能够对机器人的定位和姿态进行准确的测量和控制。
通过对定位器进行调校和校准,可以确保机器人在工作时能够准确地定位和执行任务,提高机器人系统的工作效率和精度。
在进行定位器调校时,需要严格按照操作步骤进行,保证调校的准确性和可靠性。
AEP定位器说明书

AEP系列智能阀门定位器使用说明书一 . 产品简介AEP系列智能阀门定位器是从控制器或控制系统接受4ͨ¹ý¸ßÐÔÄܵ¥Æ¬»ú´¦Àíºó½øÐÐ×Ô¶¯É趨²¢ÊµÏÖPID最佳控制HART通讯等强大的功能二 . 主要特征和功能我公司开发生产的AEP系列智能定位器也考虑了现场使用的稳定性1.产品外部装有液晶显示2.抗振性强3.工作时气源压力的变化不会影响产品的性能5.结构精小6.耗气量小经济性好8.5V因此对于控制系统几乎没限制可以获得阀门和定位器的各种工作参数HART通讯是可选项可以确认阀门的开度阀位输出是可选项ÏßÐÔ11.用户可根据控制要求设定16个点来实现特殊的输出特性14.在现场不用其它设备15.通过手动开关16.可进行41217.通过手动调整可设定零点和量程18.通过手动运行功能方便确认阀门的正常与否因此很容易检测错误状态21.不需要其它配件22.选用耐腐蚀性强的环氧聚酯进行电喷处理23.内部结构非常简单从而减少了故障的机率三 . 主要技术参数项目直行程角行程20mADC最低电流信号 3.2mA(标准型)7kgf/cm20.7MPa150mm090/20mA DC 气源接口Rc1/4, NPT1/4压力表接口Rc1/8, NPT1/8电源接口G1/2(标准型)可选项800.5F.S.灵敏度F.S.重复性0.3ÊäÈëѹÁ¦Îª1.4 kgf/cm2时3LPM以下工作温度 -10输出特性线性等百分比可设定16点95RH(40选项选项20mA(DC 10ExiaBT6+H 3.3ib相对湿度65四 . 型号分类及订货代码AEPCV3000Ecotrol20100五 . 内部结构AEP直行程智能定位器内部结构如下图所示Ä£¿é»¯µÄÉè¼Æ六 .安装1.外形尺寸图2. 机械连接与执行机构连接示意图l有管路连接(侧连)AEP300LS和执行机构连接示意图 AEP300L D和执行机构连接示意图AEP300RS和执行机构连接示意图 AEPl连接端子前请确认电源是否切断带阀位输出除外20mA直流电源标准型3.2mA最大电流不得超过24mAÐèÏò·§Î»Êä³öÄ£¿éÌṩ9×î´ó²»³¬¹ý30V²úÆ·ÄÚÇë²»ÒªÔÚ¸ßÈÝÁ¿µç»úµÈ²úÆ·¸½½ü°²×°µçÀÂa. 电流输入信号端子的连接l拧开AEP外壳上面的4个M4螺丝l拧开固定输入电流信号接线端子的螺丝l把信号线按照正负极正确连接(注意正负极并拧紧固定螺丝即可打开l通过AEP的接线导管引入信号线以免接错)c. 接地端子的连接l为了AEP和系统的安全l接地线可连接在接线柱上的中央端子或接线导管旁边的外部端子上l拧开AEP外壳上面的4个M4螺丝七 . 基本功能操作1 .自动/手动开关AEP系列智能定位器有自动/手动开关按AEP的动作要求当开关设为手动时直接输入执行机构有可能发生振动使用一字螺丝刀适当的调整可调节型节流孔就可以解决振动问题本操作会使阀门和执行机构动作请务必将阀门从整个系统中隔离开4.正常模式的说明向AEP智能定位器输入4¹ý6秒钟后正常动作模式此画面中下行文字RNU表示目前AEP正接受外部4ÕâÖÖÓÐRUN显示模式叫做RUNģʽ¸Ä±äÊäÈëÐźÅRUN模式由下列6种构成RUN PV阀门行程RUN SV%输入信号1004DigitRUN VeL当前阀门的速度如要改变显示画面ESCUPÿµã»÷Ò»´Î°´×¡键后DOWNÔò·´·½ÏòÒÀ´Î±ä»¯ESC RUN按钮分类中文名称功能确定键更改参数后保存ESC´Óµ±Ç°²Ëµ¥ÍË»ØÒ»¼¶(UP)向上键在当前菜单内更改参数(DOWN)向下键在当前菜单内更改参数八. 自动设定模式AEP智能定位器有AUTO1AUTO3V-0等5种自动设定模式AUTO2自动设定的5种类型和设定内容参数如下表〇〇〇AUTO2〇〇〇〇〇〇AUTO3〇〇〇〇BIAS1. 自动设定1当阀门厂已设定好AEP参数安装到现场后步骤如下在正常模式下ENTERÒº¾§»áÉÁ˸²¢³öÏÖAUTO CAL字样在AUTO CAL状态下ENTERÒº¾§ÉϳöÏÖAOTU1在AOTU1模式ENTERÔò½øÐÐAOTU1自动设定当AOTU1自动设定结束后并显示当前阀门开度按键6秒ENTER按键30.0%RUN PVAUTOCAL¶ÔËùÓòÎÊý½øÐÐÉ趨ʱѡÓÃAUTO220mA 电流约6秒后531数字6秒后出现如下图的信息:ͼÖÐÏÔʾµÄ±íʾ·§ÃÅ¿ª¶ÈµÄÊý×ÖÓпÉÄܲ»Í¬ENTERÔò½øÈëAUTO1显示模式按键点击一次键这时根据自动设定步骤一般在AUTO2模式的自动设定需要3µ«¸ù¾ÝÖ´Ðлú¹¹µÄ´óСºÍÆäËüÒòËØ×Ô¶¯É趨Íê³ÉµÄʱ¼ä»áÓÐËù²»Í¬ 自动设定结束后约过4秒后自动回到RUN模式AEP 的零点PID 参数ENTER按键DOWN按键4秒自动返回模式3 .自动设定3如果要自动初始化所用参数则可以选用AOTU3设定步骤相同在AUTO1模式DOWN Ôò½øÈëAUTO3模式 在AUTO3模式ENTERÔò½øÐÐAUTO3自动设定AUTO3自动设定结束过程跟上述AUTO1相同这个值受到输入空气压力如果改变输入AUTO1AUTO2空气压力值或KP值如果这个值没有正确调准步骤如下顺序和上述AUTO3自动设定步骤的DOWNÔò½øÈëBIAS模式在BIAS模式按键5. 速度感应自动设定速度感应自动设定能准确确定阀门动作速度那么KI调节明显变慢如果这个值正常ESC对准RUN VeL 时一般情况下2范围内那么重新调整V ²½ÖèÈçÏÂ顺序和上述BIAS 自动设定步骤的DOWNÔò½øÈëV-0模式在V-0模式按键九 .手动模式AEP 系列智能阀门定位器还可以根据现场的情况进行手动设定按住键6秒再按一次键ENTER Ôò½øÈëMANUAL 调整模式上行文字表示阀门开度百分比下行жMA 表示正在运行MANUAL 模式 按键或键可使阀门运动阀杆会向上运行;按键如果想加快阀门动作速度UPDOWNENTER按键阀杆慢慢向上运动同时按ENTERDOWNDOWN键阀杆快速向下运动表按键6秒DOWN按键UPDOWN°´键HAND CALÄÇô¾ÍµÃÖØÐÂÉ趨ÁãµãºÍÁ¿³Ì·§Ãźͷ§Î»·´À¡Êä³öÒ²MANU AL30.0%жMR 300 25.0%жMR 243重新设定)和量程在RUN 模式按住键6秒再按3次键ENTER½øÈëµ÷ÕûÁãµãµÄPV-ZERO 显示模式在PV-ZERO 模式下按键阀杆开始向零点移动UP DOWN ÉÏϵ÷Õû·§¸Ë°´键保存零点设定则按2次即可按键移动到调整量程的PV-END 显示模式 按键进入жPE 量程调节模式液晶上行显示阀门开度100下方显示жPE 和行程终点的内部数值 按或键量程到达所需位置后ENTERÕâʱҺ¾§ÏÔʾ+PE 字样按(ESC)键返回PV-END显示模式返回RUN 显示模式在PV-END 显示模式按键按3次键ENTER按键UPDOWNENTER按键DOWN按键UPDOWN按 ESCAUROCAL30.0%RUN PVb. 阀位输出信号零点和量程的设定当改变阀门的零点和量程后如果要得到非常精密的输出信号可以手动进行调整在PV-END 模式按住键ENTER Òº¾§ÏÔʾ§ØR-ZERO 模式这时可调整反馈信号的零点按或使这个值达到4mA 后ENTERÕâʱÏÔʾ+TR-ZERO 字样按(ESC)键退回+TR-END 按键移动到TR-END 显示模式ESCENTER ·§¸ËÏòÖÕµãÒƶ¯²¢¿Éµ÷½Ú·´À¡ÐźÅÁ¿³Ì 按或键按键保存按2次(ESC)键按键ENTER按键或ENTER按键ENTER按或键ESC按2次键250TR- 30.0%RUN2072PV-十. 参数分类及参数值的调节方法阀门执进行自动设定但是有些特殊阀门或在特殊的条件下即有可能发生振动或漂移现象就可解决问题dEAdZONE P调节KI D调节共4种构成死区(dEAdZONE) 因阀杆摩擦力很大而发生振动或漂移等问题KP °´ÊäÈëÐźŴﵽÏàӦλÖõÄËٶȱä¿ìµ±P值过小但会降低动作精度I调节值 I值过大相反过小KDÈÝÒ×·¢ÉúÕñ¶¯Ó°Ïìµ½´ï׼ȷλÖõÄ同特性在RUN模式按住键6秒钟DOWNÔò³öÏÖPARAM字样ENTERÔò½øÐÐdEAdZONE自动设定在dEAdZONE显示模式时按键并显示жEAdZONE字样利用或键可改变dEAdZONE值立即适用于当前动作一边确认动作状况按键进行保存表示已经保存Í˳ödEAdZONE显示模式再按(ESC)键按键6秒钟DOWN按键ENTER按键或 ENTER按3次键KP°´键ENTER½øÈëKP调整模式UP DOWN¸ü¸ÄÉ趨ºóÒò´ËÒ»±ßµ÷ÕûÊäÈëµçÁ÷ÖµÕÒµ½×î¼ÑÉ趨ֵ确定设定值后ENTERÒº¾§ÉÏ»áÏÔʾ+KP字样退出KP显示模式按(ESC)键返回PARAM模式即可返回RUN模式ENTER按2次键ENTER按键ENTER按键或ENTER按3次键键调整KIPARAM5.0%dEAdZO2.0%+EAdZO30.0%RUN PVPARAM5.0%dEAdZO30.0%ЖKP 1030.0%KP 5DOWN½øÈëKI显示模式液晶屏显示KI字样在 KI 显示模式按键液晶屏显示+KI字样利用或键可改变KI值立即适用于当前动作一边确认动作状况按键进行保存表示已经保存按(ESC)键按(ESC)键按键6秒DOWN按键DOWN 按键UP按键ESCDOWNKDDOWN½øÈëKD显示模式液晶屏显示KD字样在 KD 显示模式按键液晶屏显示жKD字样利用或键可改变KD值立即适用于当前动作一边确认动作状况一边运行阀门按键进行保存表示已经保存按(ESC)键按(ESC)键30.0%RUN PVAUTOCAL30.0%+KI1430.0%RUNPVPARAM5.0%dEAdZOENTER按2次键ENTER按键ENTER按键或ENTER按3次键键调整返回RUN模式十一.阀门工作模式1. 阀门模式a.动作模式DARAb.流量特性模式通常有线性快开USER SET根据用户需求d. 紧密开放可紧密开放阀门TSHUT CL当外部输入信号达到4mA 左右的设定值时f. 段幅控制20mA12 mA20mA范围内进行全程段幅控制在RUN模式按住键6秒在按4次键移动到VALVE 模式ENTER按进入жACT RA调整模式按或键按键保存返回RUN 模式30.0%Kd 530.0%+Kd1130.0%RUNPVDOWN 按键ENTER按(UP)或键调整后按键ESC返回RUN 模式b. 流量特性模式变更ENTER当反作用时DOWN ENTER ³öÏÖ§¨HAR LIN ,并可调整流量特性模式按或键如EQ°´键保存流量特性按3次(ESC)键ENTER按键ENTER按(UP)或键调整后按键ESC返回RUN 模式c. 用户自定义特性模式的变更ENTER当反作用时DOWN ENTER³öÏÖ§ØPO SET 模式液晶上行显示的数字是PO 设定的阀门开度百分比 按或键P0值保存后自动显示жP1 SET 模式调整方法跟жPO SET 相同相同方法设定P2到P15的阀门开度百分比值后保存按保存以上操作完成16个点的设定+RCT dRЖRCT30.0%RUN PVVALVEENTER按2次ENTER(UP)或键调整ENTER设定PI 的值P5值ENTER按3次d.完全开放模式的调整ENTER当反作用时DOWNENTER ³öÏÖ§ØSHUT OP 模式, 可设定全开的起始点开度 按或键按键保存返回RUN 模式当TSHUT OP 值为100ENTER 按3次键 ENTER 按或键调整后按键ESC返回RUN 模式e. 完全紧闭模式的调整ENTER当反作用时DOWNENTER ³öÏÖ§ØSHUT CL 模式, 可设定全开的起始点按或键按键保存返回RUN 模式VALVE RCTRA+SERSET100.0%ЖP15SET30.0%RUN95.0%ЖSHUT注时表示解除这个功能按键DOWN按键UPDOWN ENTER按3次键SPLIT在VALVE 模式按住键, 进入ACT RAÏÔʾģʽ按5次键标准输入信号设定为4ENTER ³öÏÖ§ØSPLIT调整模式UPDOWN°´键保存返回RUN 模式按键DOWN按键UPDOWN ENTER按3次键30.0%ЖPI0.5%ЖSHUT RCTRA4.20%SPLIT0.3%TSUT CL十二 .查看模式这个模式给用户提供多种信息DOWNENTER½øÈë¿É»ñµÃAEP 很多信息的模式按或键按(ESC)返回VIEW 模式按(ESC)键返回RUN 模式按5次键ENTER 按或键ESC返回RUN 模式项目内容AEP300产品的型号标记VERSION主程序软件的版本VIEWAEP30HART V HART协议的版本POL AddR在HART协议使用的频道地址BIAS VI内部变量中进行马达控制所必要的BIAS值跟用户无关当打开或关闭电源时所用的时间未满1分钟时不计FULL-OP阀门全开时间的总时间FULL-CL阀门全关时间的总时间VM NOR液晶上阀门开度的显示方式有百分比和数字2种显示方式这是生产厂家利用的值在查看模式可确认的项目和内容十三 .错误警告代码当AEP使用中出现异常时确认错误警告代码对应的内容后1. 错误代码出现这个代码时AEP不可控制2. 警告代码出现这个代码时AEP300可以控制对应代码B,F,G,H项反馈杆使用角度太小增加反馈杆回转角度后以上的错误持续1分钟以上阀杆摩擦力太大气源输入压力进行BIAS自动设定D I值接近最大或最小- 阀门摩擦力发生变化- 气源输入压力发生变化气源输入压力调整为正常范围内的压力进行BIAS自动设定E未定未定F全开表: 错误代码和相关措施十四 . 主程序软件导航图。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A定位器调试步骤 Document serial number【LGGKGB-LGG98YT-LGGT8CB-LGUT-
ABB定位器调试步骤
1.定位器面板设置:
2.内部接线(4根)反馈和指令线。
3..调试前的重要参数切换方式:
切换就地、远方按住MODE键不要松开,再点击↑↓键可以进行切换。
用的方式进入(远方控制)(就地控制)
若要实现快开,则先按住↑键再按键↓键;实现快关,则先按住↓键再按住↑键,方可完成操作。
④用的方式进入,出现单词SENS-POS,其意思是显示调节定位器后连杆与后旋钮弧度保持在对称的范围内。
4、调试步骤
:将↑↓键同时按,然后点击”ENTER”键,出现单词“LINEAR”调节角行程和直行程。
:按住MODE键,点击↑↓键,进入菜单。
常按ENTER键3S,然后面板显示倒数计时为0后松开,就出现自整定,直到出现完成“COMPIETE”单词。
:退出(EXIT)会显示“保存”和“不保存”,按住“ENTER”3S,则保存调试,若不保存,直接按↑键,退出到“放弃”单词,然后再按住“ENTER”
3S,退出。
④出现REVERSE单词,显示的是调节阀门和定位器的正反作用。
⑤出现CW/CCW单词,调节的是DCS和就地定位器指令的正反作用。
⑥出现EXIT单词,意思为退出。
⑦出现DIGEET单词,则调节的是DCS和就地定位器反馈的正反作用。
以上参数为重要参数调试步骤,详情请查看说明书!。