浅谈AWA-51D与THALES4000全向信标
浅谈全向信标维护工作中的难点问题
浅谈全向信标维护工作中的难点问题作者:崔海静王霜来源:《科学与财富》2016年第28期摘要:在民用航空陆基导航系统中,全向信标机是航路导航和进近引导的主要设备。
该设备板件多、结构复杂、信号流程繁琐,维护维修难度大。
本文以THALES 公司生产的DVOR 4000型设备为例,提出了运行维护工作中的一些难点问题,并针对这些问题给出了相应的解决措施或维护建议。
关键词:DVOR 4000;发射机;监控器;供电系统1引言多普勒全向信标机是国际民航组织规定的标准近程导航设备,它提供给飞机其相对磁北的角度,获得方位信息。
在航路上,与测距设备配合使用实现极坐标定位;在终端区,主要用于引导航班的进出港、辅助仪表着陆系统,保证进近程序中飞机的安全着陆。
目前国内导航台安装的设备中,很多是THALES公司生产的DVOR 4000型设备,在运行维护过程中难免会碰到一些难点问题,本文简单归纳几处难点问题,希望可以给该型号设备的运行维护人员提供几点建议。
2DVOR 4000设备简介DVOR 4000型设备的基本原理是比较两个30Hz信号的相位,以获取方位信息[1]。
一是由中央天线辐射的30Hz调幅信号,其相位与方位无关;二是由边带天线的模拟旋转产生的30Hz 调频信号,其相位随方位的变化而变化。
该设备有两个监控器并行工作,同时处理来自发射机内部和从监控天线采集回来的信号,处理结果用于产生告警、转机、关机等操作或反馈控制。
3全向信标机维护中的几处难点问题(1)发射机性能下降。
按照要求,全向信标机运行达到十五年应进行更新。
但由于种种原因不能及时更新,导致设备超期服役,则全向信标机表现为发射机性能下降, 9960副载波调制度不够。
为了使设备正常工作,维护人员不得不增加边带功率、同时增大混合函数包络。
造成这种现象的原因是设备老化,导致边带功率利用率降低、损耗功率过高,致使板件发热、芯片容易损坏。
一般正常边带功率为25W-30W左右,老旧设备的边带功率最高达46W,过高的边带功率容易使边带混合调制器(MOD-SBB)板件常损坏。
DVOR4000全向信标设备典型故障的探讨分析

DVOR4000全向信标设备典型故障的探讨分析民航青海空管分局 王成国【摘要】多普勒甚高频全向信标是国际民航组织确定的标准近程导航设备。
因其精度高,通常与测距器DME配合为飞机提供极坐标而作为进离场引导设备,也常常用于航路导航。
本文主要通过分析意大利THALES 公司DVOR4000全向信标设备MOD110-P板件故障的典型案例,探讨通过故障现象判定、信号流程分析的方法定位故障点。
本文希望在今后的日常维护中,维护人员遇到此类故障起到一定的借鉴意义。
【关键词】DVOR4000;案例;MOD110-P;分析引言近年来,随着航空业的飞速发展,越来越多的高精度导航技术如卫星导航运用到航空领域中。
多普勒甚高频全向信标DVOR导航技术依靠其成本低、航线多等优点,依然是我国航空领域重要的导航技术。
多普勒甚高频全向信标主要提供飞机相对于地面信标天线基准点的方位角,与DME配合使用实现极坐标定位,运用于机场内DVOR台出航归航;航路上作为航路检查点;两个DVOR台之间直线定位;辅助ILS系统在进近程序中保障飞机安全着陆。
就目前而言,多普勒甚高频全向信标仍是近程导航中不可获取的保障手段,并且多为意大利THALES 公司DVOR4000型设备。
本案例发生的DVOR4000设备投建与2005年,服役年限长,设备老化,性能下降,难免会出现一些疑难故障。
本文探讨分析了此DVOR4000设备MOD110-P故障的故障点定位、判断处理的方法。
一、DOVR4000系统简介THALES DVOR4000由硬件及软件部分组成。
硬件包括发射机TX1和TX2(互为主备),监视器MSP1和MSP2,本地远端通信接口LRCI,电源管理BCPS,天线转换单元ASU,天线系统六部分组成。
软件包括发射机软件,监视器软件,通信接口LRCI软件,操作软件。
发射机由频率合成器SYN-D,调制放大器MOD-110/MOD-110P,功率放大器CA-100,控制耦合器CCP-D,射频转换开关RFD,调制信号产生器(信号产生)MSG-S,调制信号产生器(控制)MSG-C,天线分配接口ASU-INT组成。
THALESDVOR4000全向信标频率偏移的分析与维修

THALES DVOR4000全向信标频率偏移的分析与维修摘要:在目前航路及机场导航设备中,使用意大利THALES生产的DVOR4000设备比较多。
为了航行安全,飞机需要去接收到正确的全向信标信息。
因此,如果全向信标台的载波频率、识别码等主要参数故障,机载设备就接收不到正确的台站信号,从而影响飞行安全。
平时,在设备排故过程中,一般会采用更换板件的维修方式,将板故障板件进行替换,以保证设备快速修复,保证设备的完好率。
在往往每个台站的备件数量较少,或者常常只有一些易损备件。
而通常损坏的板件维修都需要送到厂家或者指定地维修单位,周期长,费用高,不利于配件的冗余安全性。
因此如果能自行修复备件则为“多快好省”。
本文介绍了THALES DVOR4000设备载波频率和上边带频率发生偏移,根据设备的工作原理进行分析,发现故障点并进行排除,实现设备的元件级的自主维修。
关键词:DVOR4000 全向信标频率偏移故障分析维修引言:某导航台THALES DVOR4000设备的设备载波频率和上边带频率发生故障,监控器窗口显示为“故障”,其参数为:MOD.Depth9960Hz AM 16.7% 红色告警Carrier frequency 1134857.5Hz (正常值为111.2MHz ) 红色告警Upper Sidband frequency 红色告警据此判断为设备载波频率和上边带频率发生偏移,下边带频率正常。
需要对其进行维修处理,以保证台站设备的完好率。
一,THALES DVOR4000设备工作原理介绍THALES DVOR4000设备是由意大利THALES公司生产的DVOR全向信标设备,它可以为航空器提供准确的导航台的方位信息。
通常与DME(测距仪)合装,用于定位、导航。
它目前在我国的民航导航设备中运用数量较多,在航路或机场都有安装。
DVOR4000全向信标设备,给航空器发送基准相位信号和可变相位信号,并通过信号的相位控制,在空中合成一个调制信号给飞机,飞机经过解调获知导航台的方位信息。
浅谈多普勒全向信标识别信号
浅谈多普勒全向信标识别信号摘要:多普勒全向信标是国际民航组织确定的标准进近及航路导航设备。
本文主要概述DVOR VRB-52D型多普勒全向信标设备基本原理,识别码概念,如何产生识别码并通过天线发射以及如何按照识别码批复要求调整识别信号。
【关键词】全向信标 DVOR 识别码测距仪信号源一、全向信标介绍全向信标是民用航空飞行中现行应用最为广泛的地面导航设备之一,是由20世纪初期美国的“旋转信标”发展而来的,国际民航组织于1949年将其纳入国际标准进近导航系统,而多普勒全向信标是其中一种较高精度的近程相位测角导航系统。
多普勒全向信标(DVOR)是常规全向信标的进一步发展,利用多普勒效应及宽孔径天线系统得出更为精密的方位角信号,其使用的甚高频频段为108.00-117.975MHz,频道间隔为0.05MHz。
多普勒全向信标信号辐射方式为直达波的传输方式,极化方式为水平极化。
自20世纪90年代初中国民航引入VRB系列多普勒全向信标以来,先后更新开发了VRB-51D,52D,53D系列。
襄阳机场目前采用澳大利亚AWA 公司生产的DVOR VRB-52D型全向信标,以航路台站进行建设,辐射功率为100W,作用距离为200海里,而终端台站设备的辐射功率为50W,作用距离为25海里。
自襄阳机场全向信标设备投入使用以来,运行稳定可靠。
全向信标系统分为“地面”和“机载”两部分,地面通过49根天线组成的天线系统辐射出基准相位信号(30HzAM信号)和可变相位信号(30HzFM信号),其中基准相位信号由信号反射网中间的载波天线辐射,其相位在360度方位上是相同的,与磁北方向重合;可变相位信号由其余48根边带天线,按一定的时序发射上、下边带信号通过空间调制形成的,它的相位和方位密切相关,所在方位不同,其相位也不同。
而机载部分通过接收基准相位信号及可变相位信号,解调并对比基准及边带信号相位差,从而得到此时飞行器相对应磁北的方位角,再通过磁偏角进行计算,可得出飞行器相对于全向信标台站的方位角,从而进行对飞行器的引导。
DVOR4000全向信标设备典型故障分析与维护

DVOR4000全向信标设备典型故障分析与维护发布时间:2022-07-16T06:14:31.682Z 来源:《科学与技术》2022年第5期第3月作者:李昭睿[导读] 随着我国国力日益强盛,科技水平发展速度迅猛,人们的生活水平也随之上升了一个层次李昭睿(甘肃省民航机场集团有限公司庆阳机场分公司 745000)摘要:随着我国国力日益强盛,科技水平发展速度迅猛,人们的生活水平也随之上升了一个层次。
因此,民航的利用率也随之增加,人们的日常出行选择航空出行的频率也越来越高了。
与此同时,人们对空中交通保障的水平也提出了更高的要求,全向信标设备为航空通信导航监视风险管理工作,提供了可靠基础,也成为了交通管制的重要部分。
社会对航空飞行安全愈来愈重视,随之对风险管理工作也有了更进一步的要求,只有做好全向信标设备典型故障分析与维护工作,才能使空中交通有序进行,才能够保障航空事业的持续发展,保障飞机每一次的安全出行,基于此,分析和研究DVOR4000全向信标设备典型故障分析与维护就显得尤为必要了,能够很好地为飞机的飞行安全提供保障。
关键词:全向信标;故障;重要问题引言安全是一个持久而艰巨的任务,在飞机上飞行过程中我们要避免各种航空飞行问题的发生,为保证飞机飞行的稳定和安全,我们要不断提高对航空全向信标故障问题的重视,要了解各种可能存在危险的数据,增强忧患意识,做好故障问题的检修维护工作,来确保飞机安全飞行以及全向信标设备的准确性和稳定性。
由于我们国家民用航空技术不断提升,民航事业也发展的愈来愈强盛,全向信标设备作为民航事业的一部分,民航事业的发展离不开全向信标设备的正常运行,因此,研究民航全向信标设备故障和维护的措施就显得尤为重要了,故障和维护的完善措施能够降低设备的不正常运行发生率,为每一次的飞行安全提供保障,故需要通过结合科学的技术以及自我经验积累,给出最有效的策略对全向信标设备进行维护和保养,以此保障民航的飞行安全。
关于多普勒甚高频全向信标边带失锁原因分析及解决方法探讨

关于多普勒甚高频全向信标边带失锁原因分析及解决方法探讨摘要本文以AWA DVOR VRB-51D设备为例,根据边带产生器(SGN)、载波调制与保护器(CMP)、载波产生与驱动器(CGD)、边带调制器与放大器(SMA)等组件电路分析边带失锁原因并提出应对解决之法。
关键词DVOR VRB-51D;边带产生器;边带失锁;锁相环简介在AWA DVOR VRB-51D设备中,为使边带信号与载波信号保持一定相位关系,上、下边带产生通路均采用锁相环路。
当发生上述三种异常情况时,调整SGN的边带相位开关和边带功率电位器便可控制上、下边带波与载波之间的相位和幅度关系,在空间合成完整调幅波,确保机载设备良好的接收质量。
而当上、下边带信号相对载波信号相位不等或CMP发射机保护电路(TX PROTECTION)切断CGD载波振荡信号输出时,均会使SGN的“边带失锁”指示灯闪亮,提示维护人员边带失锁。
以下根据具体电路分析SGN的“边带失锁”指示灯闪亮时的种种可能情况。
1 CMP开关“CARRIER POWER”置“OFF”或TX PROTECTION执行保护功能如图所示,当CMP开关“CARRIER POWER”断开时,即在正常位置时,与非门D3输出低电平(假定载波及边带通道正常),二极管V64和三极管V52均截止,“边带失锁”指示灯V53熄灭。
而当CMP开关“CARRIER POWER”置于“OFF”时,情况正好相反,+15V控制切断CGD输出放大三极管电源使其无载波振荡输出;同时,+15V通过非门后加于与非门D3,则与非门D3输出高电平,二极管V64和三极管V52均导通,“边带失锁”指示灯V53闪亮。
TX PROTECTION保护的是发射机载波通道。
实际运行中,可能会出现以下三种情况:①载波定向耦合器正向耦合端输出耦合载波信号,经检波后得到直流和低频信号,再与基准电压比较,由于某些原因,正向功率可能高于某一门限或低于某一门限。
多普勒甚高频全向信标边带信号浅析
由于某些 原因, 若上 、 下边带分量的角频率偏离了 +Q和 纹 ~ ‘ , 即
矢量将是一个长度按调制规律变化的矢量, 调 幅波 矢量 的长度即为调幅波
包络值的大小。
图3
Uu s t UL
类似上文 已调波信号公式 , 我们设载波信号 U c £ / C O S f, 上边带
=妒2
豳1
0 髓 2
信号 “ ∞ c o s [ ( a ) o + Q ) f + %】, 下边 带信 号“ = c o s [ ( a  ̄ 一 n ) t 一 讫】 , 其 中彼, 和 吼 分别为上、 下边带信号相对载波信号的初始相位 。载波信号 和上 、 下边 带信 号经混频器后分别输 出 = c 0 s ( m+ %)和“ = u o o s ( D . t +  ̄ , D
分量超前载波 分量 的相位等 于下边 带分量滞后载波分量 的相位 。9 9 6 0 H z 基准方波经 上、 下边带移相器后分别输 出移相后 的基准 9 9 6 0 H z 信号 , 即
巩, 和 啦 。
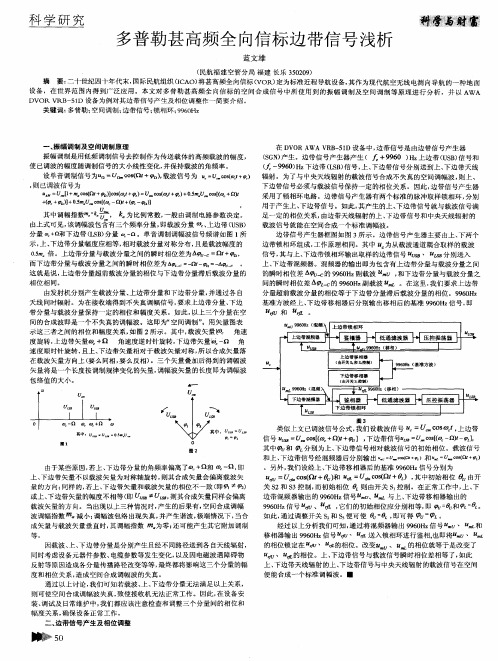
由发射机 分别产 生载波分量 、 上边带分量和下边带分量 , 并通过各 自 天线 同时辐射 。为在接收端得到不失真调幅信号 , 要求上边带分量、 下边 带分量 与载波 分量保 持一定 的相位和幅度关系 。如此 , 以上三个分量在空
相位相 同。
用于产生上 、 下边带信号 。如此 , 其产生的上、 下边带信号就与载波信号满 足一定 的相位关系 , 由边带天线辐射 的上、 下边带信号和 中央天线辐射 的 载波信号就能在空间合成一个标准调幅波 。 边带信号产生器框 图如 图 3所示 。边带信号产生器主要 由上、 下两个
科 学 研 究
科学 财 孥
AWA VRB—51D多普勒全向信标故障实例分析

AWA VRB—51D多普勒全向信标故障实例分析作者:吴疆来源:《数字化用户》2013年第24期【摘要】笔者结合工作实际,对导航设备维护和检修,写出自己分析过程和体会,希望各位专家提出宝贵意见。
【关键词】导航维护检修我台VRB-51D100W全向信标于1996年上半年安装并投产。
投产后设备运行基本稳定、可靠,没有发生过比较大的故障;小的故障发生过几次。
现将其中的一次电源控制开关与载波功放故障相关的故障现象,排除过程及分析过程做一介绍:一、故障现象2006年5月23日早晨,值班员发现DVOR切换到2#,1#机正向功率告警。
到现场发现,1#机电源控制开关组件(CCB)中的继电器的2、6两端的输出线的绝缘层被烧焦,其中6端的输出两路被烧断,其连接到限压器的23端;2端输出到另一限压器。
二、故障分析电源控制开关组件(CCB)1A71128,由两个电路开关和一个继电器组成,它输出两种类型的+24V DC电压,其一:是不受CTL组件送来的控制信号控制的+24V DC电压,它被加到CTL、各个监视器和测试单元这几个需要一直供电的组件。
其二:是受CTL组件控制信号的控制,如图-1所示。
由CCB输出线被烧的程度,可以判断故障为CCB输出的+24V对地短路引起的,而CCB 中继电器2端输出到CPA1的限压器的输入端26(2—26直连)。
继电器6端输出一路到CPA2的限压器输入端的23(6—23/29直连);另一路输出到限压器的29驱动CTL组件主板XMB:24端,进而驱动CTL组件前面板绿色的LED(RACK ON),表明该机柜开启。
注:23/29是并接在一起继电器的6端。
三、故障处理方法(一)检查继电器是否正常。
首先将CBB中继电器的输出线的2/6两端取下,将1#机设为维护 /告警抑制状态将CCB的表面开关Q1/Q2闭合,检查CTL、监视器和测试单元指示正常;将设备设置在维护状态开机,并测量继电器的动作和输出电压正常。
AWA多普勒全向信标天线系统故障分析
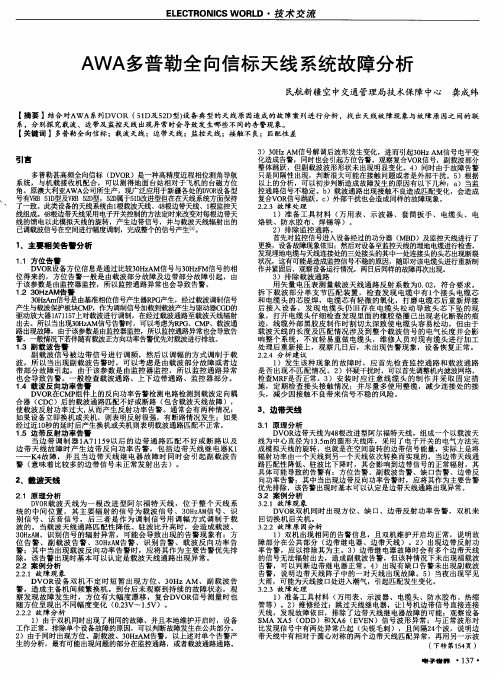
2.1 原理 分析 DVOR载 波 天 线 为 一 根 改 进 型 阿尔 福 特 天 线 ,位 于 整 个 天 线系
统 的 中间 位 置 , 其 主要 辐 射 的信 号 为 载波 信 号 、30HzAM信 号 、识 别 信 号 、话 音 信 号 , 后 三 者 是作 为调 制 信 号 用 调 幅 方 式 调 制 于载 波 的 。 当载波 天 线通 路 匹配 性 降低 、驻 波 比升 高时 ,会 造 成载 波 、 30HzAM、识别 信 号 的辐 射异 常 ,可 能会 导致 出现 的告警 现 象有 :方 位 告 警 、 副 载 波 告 警 、30HzAM告 警 、 识别 告警 、载 波 反 向 功率 告 警 ; 其 中当 出现载 波 反 向功 率告 警 时 ,应 将 其作 为 主要 告 警优 先排 除 ,该 告 警 出现时 基本 可 以认 定是 载波 天线 通路 出现 异 常 。 2.2 案例 分析 2.2.1 故 障现 象
30HzAm ̄号是 由基准相位信号产生器 ,G产 生,经过载波调制信号 产生与载波保护板块 ,作为调制信号加载到载波产生与驱动器CGD的 驱动放大器1A71 157上对载波进 行调制 ,在经过载波通路至载波天线辐射 出去。所以当出现3mIzAM信号告警时,可 以考虑为褂,G、CMP、载波通 路出现故障 ,由于该参数是由监控器监控 ,所以监控通路异常也会导致告 警,一般情况下若伴随有载波正方 向功率告警优先对载波进行排故 。 1.3 副载 波告 警
1)由于双机 同时出现 了相 同的故 障、并且本地 维护开启时 ,设备 工作正常 ,排 除单个设备故障的原因 ,可 以判 断故 障发生在 公共 部分。 2)由于 同时 出现方位 、副载波 、30HzAM告警 ,以上述对 单个告 警产 生 的分析 ,最有 可能出现 问题的部分在监控通路 ,或者载波通路通 路。
THALES DVOR4000天馈系统故障分析

THALES DVOR4000天馈系统故障分析摘要:通过对DVOR4000天馈系统的原理介绍,分析并提出检查天馈系统故障的方法及步骤。
关键词:DVOR4000 天馈系统三亚凤凰机场南山导航台于2008年安装投入使用了一套意大利生产的THALES DVOR4000型多普勒甚高频全向信标。
甚高频全向信标是国际民航组织标准的近程导航设备,其与机载VOR接收机配合使用可测得相对于地面VOR台的磁方位。
三亚南山DVOR/DME担负着三亚情报区多条航路以及三亚凤凰机场进出港航班的导航任务。
该套DVOR4000型多普勒甚高频全向信标设备投入使用至今先后出现过几次故障,结合设备的特点先后进行过技术改造,目前设备运行较为稳定;但是三亚地处沿海热带地区,盐分高、湿度大、热带风暴多,对该型号设备的天馈系统的维护保养提出了非常高的要求,现就对该设备可能出现的天馈系统故障进行了分析,提出检测边带天线故障方法供维护人员参考。
1 DVOR4000系统原理及天线系统简介如图1所示为DVOR4000系统简要框图。
由频率合成器SYN-D同时输出三种频率信号:载波信号F0,上边带信号F0+9960Hz,下边带信号F0-9960Hz;载波信号经载波调制器、载波功放、相位监视控制等组件最终上中央载波天线。
上下边带信号分别经过各自对应的边带调制器、相位监视控制、边带混合调制、边带天线开关组件等送往50根边带天线。
DVOR4000天线系统的设计具有一定的特色,与其它DVOR不同,那就是BSG-D (混合函数发生器)和MOD-SBB (边带调制器)这两个组件是包含在天线系统内的。
天线系统是否有故障可以借助该设备的计算机监控软件来检查。
若计算机软件显示只有一两对天线不好,则很有可能是最后一级十个ASM中的一个出了故障;若有一部分天线都无输出,则可能为前级的四个ASM中的一些或MOD-SBB(边带调制器)出现故障;若全部天线均无输出,则可能为边带信号发生器或PMC-D等部分出了故障。
THALES全向信标DVOR4000故障分析
175科技展望TECHNOLOGY OUTLOOK中国航班CHINA FLIGHTS摘要:HALES 全向信标DVOR4000设备RF-level 值突然下降的故障的原理分析,故障排除过程及升级改造方法。
关键词:故障分析;故障诊断;故障排除;升级改造本单位DVOR4000全向信标设备在2019年12月份发生了一起RF-level 值突然下降的故障,RF-level 值在75%-89%之间波动。
(设备设置的预警值是75%-125%。
)1故障分析与检查根据DVOR 的工作原理分析。
RF-level 射频电平值的变化与发射机的发射通路有关,也与监控器的通路有关。
通过设备的自检功能,检查发射机的各个参数,发现除了RF -level 参数异常以外, 其他的发射参数都正常。
从设备的PMC-D 检测出的功率值也正常,说明设备的发射部分是正常的。
而且双机的状态都一样,因此故障有可能是在公共部分,也就是发射机的射频通路。
从PMC-D 后到发射天线部分。
上地网检测,打开中央天线罩,发现天线的裸露可见部分无异常。
(因为我台曾经发生过30#边带天线的天线振子与电缆接头无焊接的现象,所以先检查天线振子的连接情况)在检查天线与电缆接头之间的情况,也没有发现松动或锈蚀的现象。
到此,可以暂时排除发射部分的故障。
接下来,着重检查监控部分。
监控部分由监控天线与电缆、电缆分配器、监控器组成。
监控器由MSP1、MSP2组成。
MSP1、MSP2显示的RF -level 值均同时发生变化。
因此。
可以排除监控MSP1、MSP2自身的故障。
由此看来,它的问题一定出在公共部分:(1)监控天线(2)监控电缆(大部分埋入地下)(3)天线分配器从简单方便的地方开始检查,发现电缆室内部分以及分配单元均无松动现象,检查下来也未发现异常。
由于设备已经使用十年多。
老化问题也的确存在。
因此,问题是出在室外部分的可能性极大。
于是,重点检查监控天线振子及其端子接头部分。
DVOR4000全向信标故障分析
DVOR4000全向信标故障分析作者:任福东来源:《中国科技纵横》2018年第04期摘要:本文对DVOR4000全向信标设备工作原理进行了介绍,分析了射频通道监视信号参数的意义,并通过一次大虎山导航台遇到的设备故障的分析,定位,到最后的故障排除,进一步分析比较了DVOR4000与DVOR432边带天线告警的区别,为今后其他类似的故障排除提供参考。
关键词:DVOR4000;边带天线;故障定位中图分类号:TN830 文献标识码:A 文章编号:1671-2064(2018)04-0060-03多普勒全向信标机,是目前民航界应用较多的近程方位导航设备之一,一般与测距仪配合安装使用,为民航客机提供方位和距离信息。
其工作原理简言之是通过由中央天线发射的30HzAM与边带天线发射的30HzFM信号进行比较来确定飞机与台站连线与磁北的夹角。
目前航路导航站使用的DVOR是意大利THALES公司生产的DVOR4000、DVOR432两种型号。
本文通过对设备原理及部分参数意义进行介绍,通过对一次大虎山导航台实际故障的定位判断及最后处理过程的介绍,希望可以给大家提供一些借鉴,共同提高。
1 DVOR 4000设备简介意大利THALES公司生产的DVOR4000型设备主要由以下几部分组成:发射机部分,监控信号处理部分,控制和选择逻辑组件,天线切换单元,天线阵。
发射机采用双套配置,两套发射机功能相同,均包含以下功能模块:SYN-D模块,频率合成器产生射频输入信号到调制器,还有基准信号(REF)到控制耦合器;MOD-110和 MOD-110P模块,完成载波射频的相位和幅度控制,放大射频信号,输出到RFD;CA-100模块,作用是将载波信号放大到额定输出功率100W;MSG-C和MSG-S模块,作用是对调制信号进行控制和测量;CCP-D模块,作用是对放大后的射频信号进行采样并送回控制电路,用于稳定射频信号。
两套发射机共用一套天线切换单元,发射机输出的载波信号和边带信号都要送到天线切换单元,在天线切换单元处理后,再送到载波天线和边带天线上。
关于多普勒甚高频全向信标边带失锁原因分析及解决方法探讨

关于多普勒甚高频全向信标边带失锁原因分析及解决方法探讨作者:蓝文雄来源:《科学与信息化》2018年第23期摘要本文以AWA DVOR VRB-51D设备为例,根据边带产生器(SGN)、载波调制与保护器(CMP)、载波产生与驱动器(CGD)、边带调制器与放大器(SMA)等组件电路分析边带失锁原因并提出应对解决之法。
关键词 DVOR VRB-51D;边带产生器;边带失锁;锁相环简介在AWA DVOR VRB-51D设备中,为使边带信号与载波信号保持一定相位关系,上、下边带产生通路均采用锁相环路。
当发生上述三种异常情况时,调整SGN的边带相位开关和边带功率电位器便可控制上、下边带波与载波之间的相位和幅度关系,在空间合成完整调幅波,确保机载设备良好的接收质量。
而当上、下边带信号相对载波信号相位不等或CMP发射机保护电路(TX PROTECTION)切断CGD载波振荡信号输出时,均会使SGN的“边带失锁”指示灯闪亮,提示维护人员边带失锁。
以下根据具体电路分析SGN的“边带失锁”指示灯闪亮时的种种可能情况。
1 CMP开关“CARRIER POWER”置“OFF”或TX PROTECTION执行保护功能如图所示,当CMP开关“CARRIER POWER”断开时,即在正常位置时,与非门D3输出低电平(假定载波及边带通道正常),二极管V64和三极管V52均截止,“边带失锁”指示灯V53熄灭。
而当CMP开关“CARRIER POWER”置于“OFF”时,情况正好相反,+15V控制切断CGD输出放大三极管电源使其无载波振荡输出;同时,+15V通过非门后加于与非门D3,则与非门D3输出高电平,二极管V64和三极管V52均导通,“边带失锁”指示灯V53闪亮。
TX PROTECTION保护的是发射机载波通道。
实际运行中,可能会出现以下三种情况:①载波定向耦合器正向耦合端输出耦合载波信号,经检波后得到直流和低频信号,再与基准电压比较,由于某些原因,正向功率可能高于某一门限或低于某一门限。
4000型多普勒全向信标软件系统技术分析
中。在此情况下 ,会显示出BITE告警 。 系统初始化后 ,程序进入主程序无尽循
结语
2 DVOR发射机 软件 系统
环 并开 始监 视过程 。
本文介 绍 了4000型 多普勒 全 向信
发射机软件控制发射机功能。它 由 以下软件 模块组 成 :
(1)发 射机 初始 化 :发射 机接 通 电 源 时,本模块初始化发射机硬件以便产
信 息 技 术
NewT 2016 N0.O3(上
4000型 多普勒全 向信标软 件系统技术分析
秦 伟 (中国飞行试验研 究院 ,陕西 西安 710089)
摘 要i 4000型DVOR (多普勒全向信标 )设备是 国际民航组织推荐的无线电导航设备 ,主要用于飞机的短距及 中距引
导 。某机 场该套 设备 的正 常运行 ,为飞机 的 中近程 导航提 供 了重要 保 障 ,保 证 了科研 试 飞的 正常进 行 。这套 设备 的软 件
行接 口的数 据。监控器的操作数据 由一 个 CRC检 查 字 保 护 并 在 初始 化 期 间进 行 检查 ,这些数据存储在后备电池 中。当
WINADRACS软件 中,可以进行发射机参 数 、监控器门限的调整 ,监控器参 数的 实时监测 ,电源电池 系统 电量的实时检 测 ,所有数据的保存及打 印。当设备非
(1)告警检查与告警评估 ;
线飞行 ;若VOR信标 台设在机场附近 , 计算机的编程语言 )编写。某些子程序
(3)显示监控器状态与测量结果 ;
可引导飞机 出港 ,并辅助仪表着陆系统 以汇 编 语 言 (ASM86)实 现 以便 优 化 处
(4)在 出现故障信号时的执行性动
引导 飞机安 全着 陆等 。
小议VRB-51D型全向信标故障

小议VRB-51D型全向信标故障0 引言VRB-51D型DVOR是澳大利亚AWA公司生产的全向信标设备,用于方位测定。
该套设备在面板的设计上,测试开关和测试孔比较多,有利于对各个单元组件的检测和整体设备的维护。
下面我对最近处理过的一次故障修复工作情况做以下讲解。
一故障现象主机设备开机后, CTL组件面板上的方位、边带和缺口告警指示灯亮,设备关机,自动转换到备机工作,备机工作正常。
二故障分析从面板指示的故障现象来看,由于CTL组件检测到了方位、边带和缺口告警,这些参数都和边带信号有关,所以,问题可能是出在了系统的边带信号通路中,在这里我们有必要对系统的边带信号流程做一个说明,我们知道,全向信标的信号是载波和边带波分离辐射的,其中边带波又分为上边带USB和下边带LSB,两路边带信号分别加到一对径向边带天线上辐射,并且受到时序开关信号的控制,在天线阵中模拟天线机械旋转每秒钟30圈,形成多普勒效应的30HZ调频。
这两路边带信号到天线阵径向天线的通路如图1所示:图1 边带信号流程在这个信号流程图中,SGN组件产生上、下边带信号,即f0+9960(USB)和f0-9960(LSB),这两路信号都是等幅连续波;SMA组件是将上、下边带等幅波进行混合函数调制和放大的,这个组件输出的波形就是要在边带天线上辐射的波形,它又把已调制的上、下边带信号进行了细分,分成了发往奇数天线的USB、发往偶数天线的USB、发往奇数天线的LSB、发往偶数天线的LSB这四个信号;SCU组件受到TSD信号的控制,将上、下边带信号进行定时切换,即原来发送上边带信号的天线在相隔一段时间后,改发下边带信号,发下边带信号的改发上边带信号;RLU单元是将1、2号机柜的边带信号进行接天线和接假负载转换的;ADS组件中是一些二极管组成的电子开关,每个组件中相当于有12对这样的开关,分别连通一对径向的奇数天线或是偶数天线,而这个射频开关是否导通,要受到ASD组件选通脉冲的控制,从而形成到天线的通路,进行辐射。
浅析DVOR4000边带天线的模拟旋转
学 术 论 坛203 科技资讯 S CI EN CE & T EC HNO LO GY I NF OR MA TI ON 甚高频全向信标机(very high fre-quency omnidirectional range),是目前民航界应用较多的近程方位导航设备之一,一般与测距仪配合安装使用,为民航客机提供方位和距离信息。
甚高频全向信标的基本功用是为机载VO R接收机提供一个复杂的无线电信号,经机载VO R接收机解调后,测出地面甚高频全向信标台相对于飞机的磁方位——VOR方位,它是以飞机所在位置的磁北方位为基准,顺时针方向转向飞机与地面VOR信标台之间连线的夹角[1],并直接显示在飞机的无线电磁指示器上(RMI)。
1 DVOR4000系统描述及边带天线的模拟旋转1.1DVOR4000系统D VO R 4000系统可概述分为以下几个部分[2]:发射机(Transmitter),天线转换单元(Antenna Switching Unit),天线系统(Antennas),监视及控制(Monitor),本地及远程通信(Local/Remote communication),电源及其管理(Battery Charging PowerSupply)。
主要模块功能如下,发射机产生送往天线分配系统的三个频率的信号,即CSB、SB1、SB2,以及产生送往天线分配系统的开关控制信号及相关时序。
天线分配单元主要功能为产生边带相位的控制信号与监视信号、监视载波匹配、产生天线切换的定时时钟、产生混合函数信号并调制具有功率的边带信号等。
监视与控制系统的功能是监视发射的信号,检测可能存在的有害误差或故障,产生预警或告警,逻辑控制发射机。
本地及远程通信模块主要完成的功能有通信控制以及各个单元之间的通信,本地显示控制和本地操作等。
电源及其管理则为设备各板块提供用电。
1.2可变相位信号的形成在实际运行中,设备预先设定磁北方向为统一的基准零时刻,中央天线辐射的基准相位信号的初相为零;同时,电子开关的控制,使下边带信号从一号天线开始逆时针模拟旋转辐射,上边带信号从一号天线相对应的天线逆时针模拟旋转辐射。
4000型多普勒全向信标软件系统技术分析

165中国设备工程Engineer ing hina C P l ant中国设备工程 2019.04 (下)4000型多普勒全向信标是立足于多普勒效应原理的基础之上完成测向的。
在具体实践过程中,将机载接收机与全向信标地面设备合理地配合起来,从而使机载接收机更好地检测地面VOR 信标台磁方位角。
在检测过程中,如果是在航线上面,相关的工作人员还可以使用两个VOR 信标台或者是一个测距机(DME )与一个VOR 信标台来完成飞机定位工作,引导飞机,使飞机能够沿线飞行;但是假如VOR 信标台设在了机场附近,则可以利用辅助仪表着陆系统引导飞机出港,在飞机出港的同时还可以引导飞机安全着陆。
1 DVOR4000系统软件概要研究4000型DVOR 系统主要是由基于AF (音频)子组件和RF (射频)子组件的硬件与控制硬件的软件组成,并且该系统软的自动化程度也相对较高。
DVOR 4000的软件主要由四大模块结构构成,分别是发射机软件模块、监视器软件模块、LRCI 软件模块以及WINADRACS 用户应用软件模块。
这些模块主要是为了能够有效地执行并完成设备本身的自检、运转以及监控等功能。
为此,要想使4000型多普勒全向信标设备正常运行,就要深入研究其系统软件的整个执行过程,对其软件有一个全面系统的认识。
通过上文的简单概述可以得知,DVOR4000软件主要包括发射机软件模块、监视器软件模块、LRCI 软件模块以及WINADRACS 用户应用软件模块等四部分,且DVOR4000软件主要是执行启动、调制、发射机控制以及信号生成与监督信号的任务。
除此以外,日常设备的检测、维护、监视以及检修等工作也是通过安装在计算机里面的监控软件WINADRACS 进行的。
2 DVOR4000系统软件特点2.1 技术先进且设计合理4000型多普勒全向信标设备在其发射机以及监控器都设有其自身的中央微处理芯片,不仅处理速度相对较快,计算也较为精准,且都是使用较为精确的傅里叶变换算法进行采样、计算以及检测监控信号等工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前 盲
作 为调制 信号 对载波F 0 进行 调制 , 识 别信号被 1 0 2 0 H z  ̄制 。 边带 信号主 要 由边 带 调制 放大 器S MA R t 上下 边带 进行 放大 , 定 时序 列 产生 器T S D 产 生 的混合 函 数 再对放 大 了的上 下 边带进 行调 幅 。 三 监控 信 号
调制 放大单 元进行调 制放 大后分别 到 中央 天线跟 边带天 线。 两 套设备在 电路 设 计上 有一 定差 别 : ( 1 ) 5 1 D 的载 波通路 跟边 带通 路是分 开 的 , 载 波 Hz 是通过 边带 发生器s G N产 生。 而在4 0 0 0 中载波 与边 带信号 都是 通过S Y N- D 产生 的。 ( 2 ) 在产 生边 带信号 时都使用 了锁 相环 电
原 理 由中央 天 线发射 3 0 HZ 基准 相位 信号 , 边 带天 线模 拟旋转 形 可成变相 位 信 号, 飞机通 过接 收解 调这两 个信 号来 获取方 位变 化信息 。 本 文主 要通 过对 两套
设 备 载波信 号与边 带信 号 , 调制信 号 , 监控 信号 , 天线系 统 , 电源 系统方 面进 行 分 析论述 使 读者对 二 套设备 在 硬件结 构 以及信 号 处理方 面有 一定 的认 识 。
路, 只 是用 于构 成锁 相环 电路 的载波 衄跟边带 信号 F 0 ±9 9 6 0 Hz 采样 点不 同而 已。 5 1 D 进 入平 衡混 频器 Ul 的载波 彩自载 波定 向耦 合器 C DC , 这个 载 波是 经 过C P A 放 大准备 上天 线 的载波 信号 通过 C DC 耦合 进入 边带S GN, 而用 于U1 混
5 1 D 通 过射频 放大 器监 视器 MRF 对监 控天 线接 受的 D VO R复合 信号进 行 放 大后 解 调送 往 副 载波 监视 器MS C, 滤 波 器和 识 别监 视 器MF I , 方 位 监视 器 MBC , 解调 出3 0 H z A M, 3 0 Hz , F M9 9 6 0 Hz , 识 别并将 这 些信号 转换 成直 流 电平 与参 考值 进 行 比较 。 4 0 0 0 通 过监 视信 号处 理器 MS P — V D接受 监控 天线 的射 频 信号 对3 0 Hz A m, 3 0 Hz F m, 9 9 6 0 Hz , l O 2 O H z 进行解调 从 而对设 备重要 参数 进行 监控 告警 。 在 监控信 号的处理 上基本相 同 , 都 是通过对 监控 天线接受 的射频取样 信号 进行 参数 测量 , 并 且根据 被测 参数是 否超过 门限 , 来 发 出告警 信号或 者控 制设 备 关断切 换 。 对 于监 控信 号 的处理 上AWA使用 了4 个 板件 MRF , MS C, MBC ,
AwA一 5 1 D 与T HA L E S 4 0 0 ( O 是 目前 我 国民用 航 空使用 的方 位角 导航 测
向设 备 。 A W A一 5 1 D 是 由澳大 利亚 生 产我 国从 1 9 9 3 年开 始 引进 , 而 意大 利 的 r H Au S 4 0 0 主要 从1 9 9 8 年之 后开 始大批进 入 我国 。 两套设 备都 是利用 多普 勒
MF I 来进行 监控 信号 监控 处理 , 而T H仅仅 通过 MS P — VD 就完 成 了监控信 号 的
处理 。 对 监控 信 号后 期处 理上 5 1 D 主要 是模 拟 方式 比较 电平 值 , 而4 0 0 0 采用 模 数转换 得到 各个信 号 的具体数 值存 人处理 器 内存 中与 已经设好 的参 数进 行 比 较。 四. 天 线 系统
两套设 备 的天线系统 组成基本 一致都 由载波 天线 , 边 带天 线 , 监控 天线 , 地 I 碉组成 。 在 天线开 关控 制方面 , 5 l D 边 带天线 由4 8 根组成 , 边带切 换 单元s c u接 受来 自定 时序 列产生 器T S D 产 生 的3 0 Hz x '  ̄ / 带切换 信 号 , 每1 / 6 0  ̄切换 上 下边
应 用 技 术
I ■
C h i n a s c i e n c e a n d T e c h n o l o g y R e v i e w
浅谈 A WA-5 1 D与 T HAL E S 4 0 0 0全向信标
金鸿 程
( 西北空 管局 技术 保 障中心 航路 导航 室) [ 摘  ̄] AWA一 5 1 D与T HAL E S 4 0 0 0 是 我们 航 路导 航 台使 用的 主要 导航 设备 , 通 常跟 D 加E 合装 为 飞机 提供 方位 距 离信 息 。 [ 关键 词] 载波信 号 与边 带信 号 。 调制 信号 。 监控 信号 ; 天线 系统 ; 电源 中图分 类号 : T J 5 3 + 4 . 1 文 献标 识码 : A 文章编 号 : 1 0 0 9 — 9 1 4 X ( 2 0 1 5 ) 0 9 —0 3 8 6 — 0 1
一
,
载 波与边 带信 号
5 1 D 的 载波有 自己的 单独振荡 级 , 载波信 号产生器 C G D产生 的载波F 0 一路
产 生2 5 O 毫 瓦进行驱 动放大 , 然后 到载波 功率放 大器 c P A 接着上 中央 天线 另一
路1 2 5 mw到 边带 信号 产生 器S G N用于 边 带通 路测 试 。 边 带信号 发 生器S GN 产 生 边 带信 号 到边 带 调 制放 大 器S MA进 行调 制放 大 , 然 后通 过 边 带切 换 单元
S C U上天 线 。 另外 一路 通过S MA反馈 到S G N与C DC 采 样 的载波 F O 信号进 行混 频 产生 的9 9 6 0 h z  ̄S GN的压 控振 荡器 V c o进行控 制 , 输 出稳定 的F 0 ±9 9 6 0 Hz
信号。 4 0 0 0 0 的载波 与边 带信号 是 由频 率合成 -  ̄S Y N- D分别产 生 , 他 们通 过各 自