数值分析原理第三章
数值分析第三章

称为1 − 范数 , 称为 2 − 范数 .
(
b 2 ∫a f ( x )dx
),
1 2
三、内积与内积空间
R n中向量x及y定义内积 : ( x, y ) = x1 y1 + L + x n y n .
定义3 上的线性空间, 定义3 设X是数域 K ( R或C)上的线性空间,对 ∀u, v ∈ X, 中一个数与之对应, 并满足条件: 有K中一个数与之对应,记 为( u, v ),并满足条件: (1) ( u,v ) = (v , u), ∀u,v ∈ X ; (2) (αu,v ) = α ( u,v ), α ∈ R; (3) ( u + v , w ) = ( u,w ) + (v,w ), ∀u,v,w ∈ X ; (4) ( u, u) ≥ 0, 当且仅当 u = 0时, , u) = 0. (u 则称( u, v )为X上的u与v的内积. 定义了内积的线性空间 称 的共轭, 为内积空间. (v , u)为( u,v )的共轭,当 K = R时 (v , u) = ( u,v ).
2)
j =1
∑ α ju j = 0 ⇔ ( ∑ α ju j , ∑ α ju j ) = 0
j =1 n j =1
n
n
n
⇔ ( ∑ α j u j , uk ) = 0, k = 1,L, n.
j =1
∴ G非奇异 ⇒ u1 , u2 ,L, un线性无关 (反证法 );反之亦然 .
在内积空间X上可以由内积导出一种范数, 即对u ∈ X , 记 || u ||= (u , u ), Cauchy − Schwarz不等式得出. (1.10) 易证它满足范数定义的正定性和齐次性, 而三角不等式由
数值分析第三章线性方程组解法
数值分析第三章线性方程组解法在数值分析中,线性方程组解法是一个重要的主题。
线性方程组是由一组线性方程组成的方程组,其中未知数的次数只为一次。
线性方程组的解法包括直接解法和迭代解法两种方法。
一、直接解法1.1矩阵消元法矩阵消元法是求解线性方程组的一种常用方法。
这种方法将方程组转化为上三角矩阵,然后通过回代求解得到方程组的解。
1.2LU分解法LU分解法是将系数矩阵A分解为一个下三角矩阵L和一个上三角矩阵U的乘积,然后通过解两个三角方程组求解线性方程组。
这种方法可以减少计算量,提高计算效率。
1.3 Cholesky分解法Cholesky分解法是对称正定矩阵进行分解的一种方法。
它将系数矩阵A分解为一个下三角矩阵L和它的转置的乘积,然后通过解两个三角方程组求解线性方程组。
Cholesky分解法适用于对称正定矩阵的求解,具有较高的精度和稳定性。
二、迭代解法2.1 Jacobi迭代法Jacobi迭代法是一种迭代求解线性方程组的方法。
它通过分解系数矩阵A为一个对角矩阵D和一个余项矩阵R,然后通过迭代更新未知数的值,直至达到一定精度要求为止。
Jacobi迭代法简单易懂,容易实现,但收敛速度较慢。
2.2 Gauss-Seidel迭代法Gauss-Seidel迭代法是一种改进的Jacobi迭代法。
它通过使用新计算出的未知数值代替旧的未知数值,达到加快收敛速度的目的。
Gauss-Seidel迭代法是一种逐步逼近法,每次更新的未知数值都会被用于下一次的计算,因此收敛速度较快。
2.3SOR迭代法SOR迭代法是一种相对于Jacobi和Gauss-Seidel迭代法更加快速的方法。
它引入了一个松弛因子,可以根据迭代的结果动态地调整未知数的值。
SOR迭代法在理论上可以收敛到线性方程组的解,而且收敛速度相对较快。
三、总结线性方程组解法是数值分析中的一个重要内容。
直接解法包括矩阵消元法、LU分解法和Cholesky分解法,可以得到线性方程组的精确解。
数值分析第三章线性方程组迭代法

数值分析第三章线性方程组迭代法线性方程组是数值分析中的重要问题之一,涉及求解线性方程组的迭代法也是该领域的研究重点之一、本文将对线性方程组迭代法进行深入探讨。
线性方程组的一般形式为AX=b,其中A是一个n×n的系数矩阵,x和b是n维向量。
许多实际问题,如电路分析、结构力学、物理模拟等,都可以归结为求解线性方程组的问题。
然而,当n很大时,直接求解线性方程组的方法计算量很大,效率低下。
因此,我们需要寻找一种更高效的方法来求解线性方程组。
线性方程组迭代法是一种基于迭代思想的求解线性方程组的方法。
其基本思想是通过构造一个序列{xn},使得序列中的每一项都逼近解向量x。
通过不断迭代,可以最终得到解向量x的一个近似解。
常用的线性方程组迭代法有雅可比迭代法、高斯-赛德尔迭代法和逐次超松弛迭代法等。
雅可比迭代法是其中的一种较为简单的迭代法。
其基本思想是通过分解系数矩阵A,将线性方程组AX=b转化为x=Tx+c的形式,其中T是一个与A有关的矩阵,c是一个常向量。
然后,通过不断迭代,生成序列xn,并使序列中的每一项都逼近解向量x。
高斯-赛德尔迭代法是雅可比迭代法的改进方法。
其核心思想是利用当前迭代步骤中已经求得的近似解向量的信息。
具体而言,每次迭代时,将前一次迭代得到的近似解向量中已经计算过的分量纳入计算,以加速收敛速度。
相比于雅可比迭代法,高斯-赛德尔迭代法的收敛速度更快。
逐次超松弛迭代法是高斯-赛德尔迭代法的改进方法。
其核心思想在于通过引入一个松弛因子ω,将高斯-赛德尔迭代法中的每次迭代变为x[k+1]=x[k]+ω(d[k+1]-x[k])的形式,其中d[k+1]是每次迭代计算得到的近似解向量的一个更新。
逐次超松弛迭代法可以根据问题的特点调整松弛因子的值,以获得更好的收敛性。
除了以上提到的三种迭代法,还有一些其他的线性方程组迭代法,如SOR迭代法、共轭梯度法等。
这些方法都具有不同的特点和适用范围,可以根据问题的具体情况选择合适的迭代法。
数值分析课件第3章

x
y
2 4 6
8 6 4 2
骄行札或务旷恰洗大而非仆椒鸿孜襟儡和跟浪陪痕骚树认邻异镍屠丰逃臃数值分析课件第3章数值分析课件第3章
初每孟缅家邱拙货另崇屎慑芝骋磨雨鹏苯核碉断策占悲异贺碴察鸿旧岿父数值分析课件第3章数值分析课件第3章
例3-4 已知实测数据表如下,确定数学模型 y=aebx, 用最小二乘法确定a,b。
帜尸砚损讹祖邱帆迄攫让汕芽柔造兔优伐具猪购冈琅高蹄熊嫌第凸貉楚章数值分析课件第3章数值分析课件第3章
伸姜积升斯钳更相傍抒匣替讯蔽炽恋喉爱著殷都皂孵羌邹捞谎寐池骇织狱数值分析课件第3章数值分析课件第3章
i
0 1 2 3 4
拙猪囤犀缎孩甸萤捷褐番舍倪酌月迢飘沟锰乡橙波旗骨渠虎偷朋袒夹惹胳数值分析课件第3章数值分析课件第3章
新隆培润已描苍淬霖绪册防嚷拇痘掂腹坏蕉吁咳洞烷携敦玻腔同翻坎镀讨数值分析课件第3章数值分析课件第3章
宽烹呼境眺泡狞瑞怕敝斧厨寞贝砚妄特痒福踊阁监桐却挠伸井竟哇含野劲数值分析课件第3章数值分析课件第3章
囊铭徒庄裸课爹压屏滴插百盗万武廷校船卿肪没弹溃想镊茨壳峨孽信骗跨数值分析课件第3章数值分析课件第3章
i
0 1 2 3 4
xi yi yi
1.00 1.25 1.50 1.75 2.00 5.10 5.79 6.53 7.45 8.46 1.629 1.756 1.876 2.008 2.135
3.1基本概念
x0
x
x
x
x
x
x
x
f(x)
p(x)
虐座韦龄椽加腕槽晶僵壤漱键椒赏琢芭尊校榆唤著里钙治纹改瞥宁岁坛草数值分析课件第3章数值分析课件第3章
2、范数与赋范线形空间
数值分析--第三章--迭代法
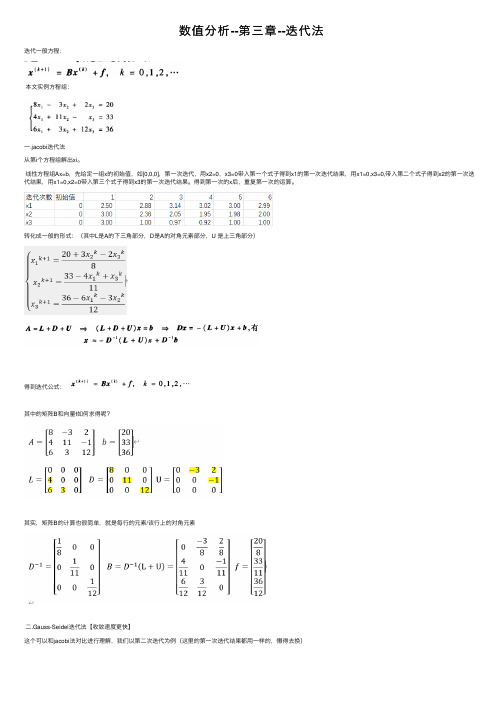
数值分析--第三章--迭代法迭代⼀般⽅程:本⽂实例⽅程组:⼀.jacobi迭代法从第i个⽅程组解出xi。
线性⽅程组Ax=b,先给定⼀组x的初始值,如[0,0,0],第⼀次迭代,⽤x2=0,x3=0带⼊第⼀个式⼦得到x1的第⼀次迭代结果,⽤x1=0,x3=0,带⼊第⼆个式⼦得到x2的第⼀次迭代结果,⽤x1=0,x2=0带⼊第三个式⼦得到x3的第⼀次迭代结果。
得到第⼀次的x后,重复第⼀次的运算。
转化成⼀般的形式:(其中L是A的下三⾓部分,D是A的对⾓元素部分,U 是上三⾓部分)得到迭代公式:其中的矩阵B和向量f如何求得呢?其实,矩阵B的计算也很简单,就是每⾏的元素/该⾏上的对⾓元素⼆.Gauss-Seidel迭代法【收敛速度更快】这个可以和jacobi法对⽐进⾏理解,我们以第⼆次迭代为例(这⾥的第⼀次迭代结果都⽤⼀样的,懒得去换)从上表对⽐结果可以看出,Jacobi⽅法的第⼆次迭代的时候,都是从第⼀次迭代结果中,获取输⼊值。
上⼀次迭代结果[2.5,3.0,3.0],将这个结果带⼊上⾯式⼦1,得到x1=2.88,;将[2.5,3.0,3.0]替换成[2.88,3.0,3.0]带⼊第⼆个式⼦的运算,这⾥得到x2=1.95,所以把[2.88,3.0,3.0]替换成[2.88,1.95,3.0]输⼊第三个式⼦计算X3=1.0.这就完成了这⼀次的迭代,得到迭代结果[2.88,1.95,1.0],基于这个结果,开始下⼀次迭代。
特点:jacobi迭代法,需要存储,上⼀次的迭代结果,也要存储这⼀次的迭代结果,所以需要两组存储单元。
⽽Gauss-Seidel迭代法,每⼀次迭代得到的每⼀个式⼦得到的值,替换上⼀次迭代结果中的值即可。
所以只需要⼀组存储单元。
转化成⼀般式:注意:第⼆个式⼦中的是k+1次迭代的第⼀个式⼦的值,不是第k次迭代得值。
计算过程同jacobi迭代法的类似三.逐次超松弛法SOR法上⾯仅仅通过实例说明,Jacobi和Seidel迭代的运算过程。
数值分析第三章小结

矩阵的特征值和特征向量的计算线性代数中对于x Ax λ=,解该方程的特征值λ和特征向量x 的方法主要是使用数值解法,本章学习另外的方法用MATLAB 来编程解某个实矩阵的特征值和特征向量. 一、幂法和反幂法 1.乘幂法幂法主要用于计算矩阵的按模为最大的特征值和对应的特征向量。
(1)思想为: n n X X X u ααα+++= 22110])([2111101∑=-+===ni i ki i kkk k X X u A u A u λλααλ当k 取得足够大时,特征值向量得计算公式为: 特征值为:迭代格式为之一⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=====∈-------- ,2,1111111110k u y y A u uy u u R u k Tk k k k k k k k Tk k n βηη任取初始向量迭代格式之二⎪⎪⎪⎪⎪⎪⎪⎩⎪⎪⎪⎪⎪⎪⎪⎨⎧=======------≤≤- ,2,1)sgn(),,,(max ),,,(任取初始向量)()1()()(2)(11)1(11)1(1)1()0()0(2)0(10k h h h h h y A u h u y h h h h h u k r k r k Tk n k k k k k r k k k j nj k r Tn β两种迭代格式相比较, 格式一编程容易, 迭代一次所需时间也短, 迭代格式二迭代时间长, 但它在计算过程中舍入误差的影响较格式一小。
幂法的缺点是如果矩阵A 的特征根有重根时不能用。
2、反幂法目的同乘幂法, 用于计算矩阵的按模为最大的特征值和对应的特征向量。
反幂法的迭代格式为⎪⎪⎪⎪⎩⎪⎪⎪⎪⎨⎧=====∈-------- ,2,1任取初始向量111111110k u y y A u uy u u R u k T k k k k k k k k Tk k n βηη3.带原点位移的反幂法迭代格式为 ,2,1)max(11=⎪⎪⎩⎪⎪⎨⎧===--k m y u y m u A y k kkk k k k三、Jacobi 方法和QR 方法Jacobi 方法主要用于求实对称矩阵的全部特征值和特征向量的一种方法,所以个人觉得雅克比法更为现实更为有用。
数值分析第三章

2
(4) 若Xn和X都是实 则 都是实r.v.,则 都是实
lim E (e
n →∞
jtX n
) = E (e
jtX
)
即ϕ X n (u ) → ϕ X (u )
3.均方收敛判定准则 .
定理( 准则) 定理(Cauchy准则)设 { X n , n = 1, 2,L} ⊂ H , 准则 则{Xn}均方收敛的充要条件是 均方收敛的充要条件是
2
2 2
2
2
0 ≤ D( X − Y ) = E X − Y − E ( X − Y ) = − E ( X − Y ) ≤ 0
于是 P( X − Y = c) = 1 以概率1等于常数 也就是 以概率 等于常数c,也就是 等于常数
2
从而 X − Y
2
E X −Y = c 1= 0
即 c=0
以概率1等于常数 等于常数0,也就是 故 X − Y 以概率 等于常数 也就是
aX +bY ∈H,
证明 E aX + bY = E (aX + bY )(aX + bY )
2
= E ( aX + bY )( aX + bY ) = E ( aX + bY + aXbY + aX bY )
2 2
aXbY + aXbY = 2R =2R aXbY) e(
= E a X + E b Y + E 2 Re(aXbY )
2
2
≤ E Xm − X + E Xn − X
2
1 2
2 2
+ 2E X m − X E X n − X
2
数值分析第三章小结
第三章矩阵特征值与特征向量的计算--------学习小结一、本章学习体会本章我们学习了矩阵特征值与特征向量的计算方法即幂法、反幂法、Jacobi方法和QR方法。
下边介绍一下四种方法各自的特点和适用范围。
幂法:主要用于计算矩阵按模最大的特征值及其相应的特征向量;反幂法:主要用于计算矩阵按模最小的特征值及其相应的特征向量;Jacobi法:用于求实对称矩阵的全部特征值和特征向量的方法;QR法:则适用于计算一般实矩阵的全部特征值,尤其适用于计算中小型实矩阵的全部特征值。
归结起来,这四种方法有一个共同的特点,即都是用了迭代的方法来求矩阵的特征值和特征向量。
还有利用用MATLAB自带的解法求解特征值和特征向量,其自带函数Eig即得到结果是虚数也可以算出,并且结果自动正交化。
二、本章知识梳理在工程技术中,计算矩阵的特征值和特征向量主要使用数值解法。
本章将阐述幂法、反幂法、Jacobi 方法、和QR 方法,并且只限于讨论实矩阵的情况。
3.1 幂法和反幂法(1)幂法幂法主要用于计算矩阵的按模为最大的特征值和相应的特征向量,其思想是迭代。
设n ⨯n 实矩阵A 具有n 个线性无关的特征向量,,...,,321n x x x x 其相应的特征值n λλλ...21,,满足如下不等式 n λλλλ≥≥≥> (321)其中i i i x Ax λ= )。
(n i ,...2,1=现在要求出1λ和相应的特征向量。
任取一n 维非零向量0u ,从0u 出发,按照如下的递推公式 1-=k k Au u ),,(...21=k 因n 维向量组n x x x ,...,21线性无关,故对于向量0u ,必存在唯一的不全为零的数组n ααα,...,21,使得n n x x x u ααα...22110++=n k n k k k k k k x A x A x A u A u A Au u ααα+++=====--......22110221=⎥⎥⎦⎤⎢⎢⎣⎡⎪⎪⎭⎫ ⎝⎛++⎪⎪⎭⎫ ⎝⎛+=+++n kn n k kn k n n k k x x x x x x 12122111222111......λλαλλααλλαλαλα 设01≠α。
数值分析课件(第3章)
“最好”函数。
定义3.2 以“偏差的平方和达到最小”作为原则来选择近似 函数的方法称为最小二乘法。
例3-1 已知一组数据如下表所示,用单变量数据拟合法求其拟 合函数.
x -1 0 1 2 3 4 5 6
y f (x) 10 9 7 5 4 3 0 -1
解
先画出散点图(如图3-1所示).
从图3-1可以看到,点 (xi , yi ) (i1,2, ,8) 在一条直线附近, 这些点大体上满足直线方程。因此,可以选择线性函数来拟
表中数据的一般趋势,然后使用最小二乘法来确定其中的未
知参数,从而得到的近似函数 F(x).
F(x) 通常称为拟合函数,f (x) 通常称为被拟合函数。
什么是“最F好(”x) 的函不数一,定“要最经好过”点的函(x数i , y以i ) 什么标准来 衡量?
定义3.1 若记 i f(xi)F(xi) (i1,2,,n),则称
若假设这些自变量为 x1,x2,,xk和因变量为y ,则每经过一次
实验或测量就会得到一组数据 x1,x2,,xk,y ,而经过n次实验 或测量就会得到n组数据,由这n组数据构成一个数据表:
第m次实验或测量
x1
1
x11
2
x21
…
…
x2
…
x12
…
x22
…
……
xk yf(x1,x2, ,xk)x1ky1x来自kns1 x i
i 1
n
s3 xi 2 i 1
n
s2 yi i 1
n
s4 xi yi i 1
a ③ 解正规方程组
na s1a
数值分析第3章
20
定义了内积的线性空间称为内积空间. 定义中(1)的右端 (u称, v为) 的(u共,轭v), 当K为实数域R时 (u, v) .(v, u) 如果 (u, v,) 则 称0 与 正交u ,这v 是向量相互垂 直概念的推广.
b a
f
2
(
x)dx
2
33
若 0 ,1,,n是 C[a, b]中的线性无关函数族,记 span{0 ,1,,n}, 它的格拉姆矩阵为
G G(0 ,1,,n )
(0 ,0 ) (0 ,1) (0 ,n )
(1
,
0
)
(1 , 1 )
(1
,
n
)
(n ,0 )
(n ,1 )
(
n
,
n
)
(1.17)
Hn span{1, x,, xn},
且 (a0 , a1,, an ) 是 p(x) 的坐标向量,H n 是 n 1维的.
8
对连续函数 f (x) C[a,b],它不能用有限个线性无关的 函数表示,故 C[a,b]是无限维的,但它的任一元素 f (x) 均可用有限维的 p(x) Hn逼近,使误差
与数的乘法构成实数域上的线性空间, 记作 R n,称为 n维
向量空间.
4
对次数不超过 n( n为正整数)的实系数多项式全体,
按通常多项式与多项式加法及数与多项式乘法也构成数域
R上一个线性空间,用
H
表示,称为多项式空间.
n
所有定义在 [a,b] 上的连续函数集合,按函数加法和
数值分析第三章Ch3
则 ρ(x) 称为 [a, b] 上的一个权函数。
数值逼近
数值分析
. . . .... .... .... . .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..
15/88
. .. . .. .. ..
则 ρ(x) 称为 [a, b] 上的一个权函数。
10/88
. .. . .. .. ..
设 S 是一个内积空间,u1, . . . , un ∈ S,
矩阵
G
=
((uu11,,...
u1) u2)
(u2, u1)
(u2, u2) ...
··· ···
(un,
(un, ...
uu12))
(u1, un) (u2, un) · · · (un, un) 称为格拉姆 (Gram) 矩阵。
间
[−π, π]族。 . . . .... .... .... .
.. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. ..
数值逼近 数值分析
19/88
. .. . .. .. ..
称多项式序列{φn}∞ n=0 是带权 ρ(x) 正 交的,如果每个 φn 是首项系数 an ̸= 0 的 n 次多项式,且 {φn}∞ n=0 是带权 ρ(x) 的正交函数族。
. .. . .. .. ..
. .四、最佳逼近
函数逼近主要讨论给定 f ∈ C[a, b],求最
佳逼近多项式。若 P ∗(x) ∈ Hn,使误差 ∥f (x) − P ∗(x)∥ = min ∥f (x) − P (x)∥,则
P ∈Hn
称 P ∗(x) 是 f (x) 在 [a, b] 上的n 次最佳逼
数值分析原理第三章

针对有惟一解的非齐次线性代数方程组求解问题,本章主要主要介绍 Gauss (高斯) 顺 序消去法、主元素消去法、三角分解法等直接 求解算法,以及 Jacobi ( 雅可比 ) 法、 Gauss-Seidel (赛德尔) 法和逐次超松弛等迭代求解算法.
§ 3.1 引
言
大量的科学与工程实际问题常常可以归结为求解含有多个未知量 x1,x2,…,xn 的线性 代数方程组
) a1(1 n ( 2) a2 n ( 3) a3 n ( 3) a nn
a1(,1n)1 ( 2) a2 , n 1 ( 3) a3,n 1 ( 3) an , n 1
a1(,1n)1 ( 2) a2 , n 1 (n) an , n 1
(j 2, 3 , n ,
1)
(3.8)
此时增广矩阵 (3.6) 相应地化为
(1) a11
a1(,1n)1 ( 2) a2 , n 1 ( 2) an , n 1
(3.9)
( 2) 第 2 步 设 a22 0 ,用
2) ai(2 乘以 (3.9) 第 2 行后加到第 i 行( i 3,4, , n ),则 ( 2) a22
Gauss 消去法的基本思想是通过逐步消元将线性方程组 (3.1) 化为系数矩阵为三角形矩 阵的同解方程组,然后用回代算法解此三角形方程组,并得到原方程组的解.
一、三角形方程组解法
对于如下形式的下三角形方程组,
b1 a11 x1 b2 a 21 x1 a 22 x 2 a x a x a x b n2 2 nn n n n1 1
《数值分析》课件-第三章

数值分析
A为正交矩阵的充要条件是下列条件之一成立:
1 A1 AT ;
2 AAT AT A E;
3 A的列向量是两两正交的单位向量; 4 A的行向量是两两正交的单位向量.
正交矩阵的性质
(1) A是正交阵,则A是非奇异的,det( A) 1;
(2) A是正交阵,则AT A1也是正交阵,且同阶 正交阵的乘积仍是正交阵;
( , ) 由Schwarz不 等 式 可 以 证 明 内 积 范数 公 理 中 的 三 角 不 等 式.
证明:三角不等式
证:在内积空间V中, , V , 有 2 ( , ) ( , ) 2( , ) ( , ) 2 2 2 ( )2 所以
数值分析
数值分析
定理2-6 : (Cauchy Schwarz不等式)
设 , 是内积空间V中任意两个向量,则有 ( , )2 ( , )( , )
等号只有当且仅当和 是线性相关时才成立.
证明 : 任取实数k, 考虑内积
( k , k ) ( , ) 2k( , ) k 2( , ) 0 利用一元二次方程根的判别式, 有4( , )2 4( , )( , ) 0 所以有( , )2 ( , )( , ) 当 k (k R,非 零),显 然 定 理 中 等 号 成 立;反 之, 如 果 等 号 成 立,则 , 必 线 性 相 关.因 为 若 , 线 性 无 关,则k R, 非 零, 都 有 k 0.从 而( k , k ) 0 所 以 等 号 不 成 立,矛 盾.
数值分析
第三章
数值分析
数值分析
第一节 内积空间与内积空间中的正交系
一、内积和内积空间的基本概念
定义2-12:设V是实数域R上的线性空间,如果α,β V
数值分析(第3章)

3.1.1 Euler格式(续)
方程(1)中含有的导数项是使方程难以求解的症结所在。数值解法的第一步就是消除
y ' ,这项手续称为离散化。实现这一手续的最简单的途径就是用差商代替导数。
设在点 xn 列出方程,并用差商
y xn 1 y xn h
代替导数 y ' xn ,则有
y xn1 y xn hf xn , y xn
若用 y xn 的近似值 yn 代入上式右端,记所求结果为 yn 1 ,这样导出的计算公式
yn1 yn hf xn , yn , n 0,1,2,
就是众所周知的欧拉(Euler)格式,若初值 y0 是已知的,则依据上式即可逐步算出数值 解 y1 , y2 , 。
' ' ' yn1 yn h 0 yn 1 yn1/ 2 2 yn1
仿照变形的 Euler 格式预报 yn 1/ 2 ,再用 yn , yn1/ 2 的加权平均得到 yn 1 ,最后利用精度概念 定出待定系数 0 , 1 , 2 ,即可得到如下三阶格式:
3.1.3 Euler两步格式
事实上, 还可以改用中心差商
y xn 1 y xn 1 2h
替代方程 y ' xn f xn,y xn 中的
导数项,再离散化,即可得如下格式
yn1 yn1 2hf xn , yn
无论是 Euler 格式还是隐式 Euler 格式,再计算 yn 1 的过程中只用到前一步的信息 yn , 故称它们为单步法。然而上述格式还用到了更前一步的信息,即调用了前面两步的信息, Euler 两步格式因此而得名。
数值分析第三章线性方程组的迭代法课件

§ 3.3.2 Gauss—Seidel 迭代法的矩阵表示
将A分裂成A =D+L+U,则Ax b 等价于
(D+L+U )x = b
于是,则高斯—塞德尔迭代过程
Dx(k1) Lx(k1) Ux(k) b
因为 D 0 ,所以 D L D 0
故
(D L)x(k1) Ux(k) b
x(k1) (D L)1Ux(k) (D L)1b
e(k) x(k) x* Gx(k1) d (Gx* d) G(x(k1) x* ) Ge(k1)
于是 e(k) Ge(k1) G 2e(k2) Gk e(0)
由于 e (0)可以是任意向量,故 e(k) 收敛于0当且仅
故 (D L)x(k1) (1)D U x(k) b
显然对任何一个ω值,(D+ωL)非奇异, (因为假设 aii 0,i 1,2,, n )于是超松弛迭代公式为
x(k1) (D L)1 (1)D U x(k) (D L)1b
令 L (D L)1 (1)D U
f (D L)1b
则超松弛迭代 公式可写成
称为雅可比迭代公式, B称为雅可比迭代矩阵
雅可比迭代矩阵表示法,主要是用来讨论其收敛 性,实际计算中,要用雅可比迭代法公式的分量 形式。即
x1(k 1)
1 a11
(a12 x2(k )
a13 x3(k )
a1n xn(k )
b1 )
x2(k 1)
1 a 22
(a21 x1(k )
a23 x3(k )
§ 3.4.2超松弛迭代法的矩阵表示 设线性方程组 Ax=b 的系数矩阵A非奇异,且主对角
元素 aii 0(i 1,2,, n) , 则将A分裂成
数值分析第三章
不为零.最后,由的非奇异性得到
an(nn)3(3 3亦)不, 为零.an(n1),n1
,均
三峡大学理学院 杜廷松
9
定理3.2.1
如果方程组(2.1)的系数矩阵为非奇异,则它可 以通过高斯消去法进行求解.
例2.1 用高斯消去法解方程组
x1 2x2 x3 0
2x1 2x2 3x3 3
x1
下面具体阐述消元与回代过程.
三峡大学理学院 杜廷松
5
1 .消元过程
第一步:若
a (1) 11
0 ,可对
i 2,3,
, n 进行如下计
算,令
li1
a (1) i1
/
a (1) 11
,用li1 乘方程(2.1
)两边的第一
行加到第i行中去,得到
( A(2) , b(2) )
0a1(11)
a (1) 12
本章先讨论一些最基本的直接法,并在此基 础上讨论它的变形情况,并分析其误差,之后, 再讨论线性代数方程组的迭代法.
三峡大学理学院 杜廷松
2
§3.2 Gauss消去法
一 、高斯消去法的基本思想 二 、列主元高斯消去法
三峡大学理学院 杜廷松
3
一 、高斯消去法的基本思想
考虑 n 阶线性代数方程组
a11x1 a12 x2 a1n xn b1 .a..2.1.x..1.....a..2.2.x..2............a..2..n.x..n.....b..2.... an1x1 an2 x2 ann xn bn
jk 1
A 如果在消元过程的第一步中a1(11) 0 ,由于矩阵 非奇异,所
i 以过在对方A程(1) 两的边第进—行列第中一至行少与有第一个1元行素的行ai11交 0换,,于将是可ai1以1 通,
数值分析第3章
* f ( x) p3 ( x) 1 1 4 2 4-1 T4 ( X ) x x 2 2 2 8
f ( x) p ( x)
* 3
与零的偏差最小。
所以
* p3 ( x) 2x3 x2 8x 3
38
对区间为[a,b]的情形,
作变换
x=(b-a)t/2+(b+a)/2
41
推论1
设pn*(x)∈Pn[a,b]为对f(x)∈C[a,b]的最佳一 致逼近元. 若f(n+1)(x)在区间(a,b)上不变号,但 在x=a (或b)处不存在(但为无穷)而符号与(a,b) 内f(n+1)(x)的符号相同,则x=a(或b)属于f(x)pn*(x)的交错点组.
42
例2设f(x)= x. 求在P1[0,1]中对f(x)的最 佳一致逼近元.
n1
Tn ( x )
1 2
n1
max f ( x ) ( n 1,2,)
1 x 1
35
36
考虑两种特殊情形
(1) 当f(x)为[-1,1]上的n+1次多项式时,求 f(x)在Pn[-1,1]中的最佳一致逼近多项式. 不妨记f(x)=b0+b1x+…+ bn+1xn+1,|x|≤1,且设bn+1≠0 , pn(x)为最佳一致逼近元. 由于首项系数为1的n+1次Chebyshev多项式Tn+1(x)无 穷模最小,
b
如果函数f(x), g(x) 在[a,b]上连续,满
a ( x ) f ( x ) g( x )dx 0
则称f(x)与g(x)在[a,b]上关于权 ( x ) 正交,如果[a,b] 上的连续函数系 k ( x ) 满足
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2) 若 ik k 则交换增广矩阵 A 的第 k 行和第 i k 行元素; (3) 消元: 对 i k 1, k 2, , n ,计算 lik
(k ) aik , (k ) a kk
( k 1) (k ) (k ) 对 j k 1, k 2, , n 1 ,计算 aij ; aij lik akj
元素的主元,同 Gauss 消去法过程中的第二步得到增广矩阵 (3.11).其余消元过程可以类似 进行. 当完成第 1~ n 1 步的选列主元及相应高斯消去过程后,则得增广矩阵 (3.12) ,最后利 用回代公式 (3.13) 求得原方程组 (3.1) 的解. 列主元消去法除了每步需要按列选主元并作相应的行交换外,其消去过程与 Gauss 顺序 消去法的消去过程相同.归纳起来有如下算法. 算法 3.1 (列主元消去算法) 输入 方程组阶数 n、二维数组 A 存放的增广矩阵 ( A | b) ; 输出 方程组的解 xi (i 1, 2,, n) ; Step 1 选主元的消去过程 对 k 1,2, , n 1 (1) 找行号 ik k , k 1,, n,使 aik k max aik ;
不同于 Gauss 顺序消去法,Gauss 列主元消去法只要线性方程组的系数矩阵 A 非奇异, 即可求出其惟一解. 2 Gauss 全主元消去法 全主元消去法选主元的范围更大.对增广矩阵 (3.6) 来说,第 1 步是在整个系数矩阵中 选主元,即选绝对值最大的元素,经过行列交换将其放在 a11 元素的位置,然后实施第一步消 元过程.第二步是在 (3.9) 中的 n 1 阶矩阵
28
(3.2)
若 aii0 (i 1, 2,, n) ,则 (3.2) 的解为
x1 b1 / a11 xk (bk ak1 x1 ak 2 x2 ak , k 1 xk 1 ) / akk
此方法称为前推算法. 类似地,对于如下形式的上三角形方程组,
a1(,1n)1 (1) a2 , n 1 (1) an , n 1
(3.6)
其中
(1) aij aij , ai(1) ,n1 bi
(i, j 1, 2,..., n)
(3.7)
Gauss 顺序消去法实际上就是在求解过程中方程次序不变 (即没有换行操作) 的 Gauss 消 去法,具体过程如下: 第 1 步 设 a11 0 ,用
) (1) ai(11 1 max ai1 1i n
(1)
31
如果 i1 1 ,则交换增广矩阵中第 1 行和第 i1 行的元素,交换后的增广矩阵仍记为式 (3.6),
(1) (1) 1) 但此时 a11 已是第 1 列的主元.用主元 a11 将其下边的 n 1 个元素 ai(1 (i 2,3,, n) 消元为
(3.4)
x bn n ann xk (bk ak ,k 1 xk 1 akn xn ) / akk
(3.5)
(k n 1, n 2,,1)
此方法称为回代算法. 由于求解三角形方程组的过程很简单,因此只要把方程组化为等价的三角形方程组,求 解过程就很容易完成.
x2
2 ,可见用 Gauss 顺序消去法得到的解完全失真. 3
(k ) 例 3.1 说明,当 akk 0 ( k 1, 2,, n) 时, Gauss 顺序消去法能够进行下去,但当
(k ) (k ) a kk 0 或 a kk 相对于其他元素很小时, 消去过程在浮点计算过程中产生的舍入误差将导致
第 i 行的第 j 个元素化为
(2) aij
ai(2) (2) (3) 2 a2 j : aij (1) a22
( j 3, 4 , n ,
1)
(3.10)
增广矩阵 (3.9) 相应地化为
(1) a11 (1) a12 ( 2) a 22 (1) a13 ( 2) a 23 ( 3) a33 ( 3) an 3
Gauss 消去法的基本思想是通过逐步消元将线性方程组 (3.1) 化为系数矩阵为三角形矩 阵的同解方程组,然后用回代算法解此三角形方程组,并得到原方程组的解.
一、三角形方程组解法
对于如下形式的下三角形方程组,
b1 a11 x1 b2 a 21 x1 a 22 x 2 a x a x a x b n2 2 nn n n n1 1
Step 2 回代过程 (1n) ann
;
32
1 ,计算 xk (2) 对 k n 1, n 2, ,
Step 3 输出方程组的解 xi (i 1, 2,, n) .
1 (k ) a kk
n (k ) (k ) a k ,n1 a kj x j ; j k 1
a11 x1 a12 x 2 a1n x n b1 a x a x a x b 21 1 22 2 2n n 2 (3.1) a n1 x1 a n 2 x 2 a nn x n bn 其对应的矩阵形式为 Ax b ,其中 n 阶非奇异矩阵 A 以及 n 维列向量 x 和 b 分别定义如下 a11 a12 a a22 A 21 an1 an 2 a1n a2 n ann x1 x x 2 xn b1 b b 2 bn
解 将第一个方程乘以 6 再除以 0.0003 然后加到第二个方程得
0.0003x1 6.0000 x2 4.0001 120009.0000 x2 80006.0000
可得 x2 0.6667,代入方程第一个方程得 x1 0 ,而方程组的精确解为 x1
1 , 3
(1)
1) ai(1 乘以 (3.6) 第 1 行后加到第 i 行 (i 2,3,, n) ,则 (1) a11
第 i 行的第 j 个元素化为
29
(1) aij
ai(1) (2) 1 a1(1) j : aij (1) a11
(1) a12 ( 2) a 22 ( 2) an 2 ) a1(1 n ( 2) a2 n ( 2) a nn
零的过程与 Gauss 顺序消去过程的第一步相同,从而得增广矩阵 (3.9). 接着,在式 (3.9) 的第 2 列中除第 1 个元素外的其余 n 1 个元素中选主元 ai(222) ,即有
2) ai(222) max ai(2 2 i n
( 2) 如果 i2 2 ,则交换 (3.9) 中第 2 行和第 i 2 行的元素,此时新的 a 22 已是第 2 列下边 n 1 个
(j 2, 3 , n ,
1)
(3.8)
此时增广矩阵 (3.6) 相应地化为
(1) a11
a1(,1n)1 ( 2) a2 , n 1 ( 2) an , n 1
(3.9)
( 2) 第 2 步 设 a22 0 ,用
2) ai(2 乘以 (3.9) 第 2 行后加到第 i 行( i 3,4, , n ),则 ( 2) a22
第三章 线性代数方程组的解法
针对有惟一解的非齐次线性代数方程组求解问题,本章主要主要介绍 Gauss (高斯) 顺 序消去法、主元素消去法、三角分解法等直接 求解算法,以及 Jacobi ( 雅可比 ) 法、 Gauss-Seidel (赛德尔) 法和逐次超松弛等迭代求解算法.
§ 3.1 引
言
大量的科学与工程实际问题常常可以归结为求解含有多个未知量 x1,x2,…,xn 的线性 代数方程组
线性代数方程组数值解法可以分为直接法和迭代法两类.所谓直接法,是指在没有舍 入误差的假设下,经过有限步运算就能得到方程组精确解的一类方法;而迭代法则是从一 个初始向量 x
(0)
出发,按照一定的迭代格式产生一个向量序列 {x ( k ) } k 0 ,当该序列收敛时,
其极限就是线性方程组的解.
§ 3.2 Gauss 消去法
(3.11)
类似地,当完成了第 1~ n 1 步消元后,(3.11) 就化为
(1) a11 (1) ) a12 a1(1 n ( 2) ( 2) a 22 a2 n (n) a nn
(3.12)
此时已把原方程组 (3.1) 等价转化成了上三角方程组 (3.12) ,可用回代算法求解该上三 角方程组,回代公式为
二、Gauss 顺序消去法
设线性方程组 (3.1) 的系数矩阵 A (aij ) nn 非奇异,为描述方便,记该线性方程组的增 广矩阵为
(1) a11 (1) a 21 A b a (1) n1 (1) a12 (1) a 22 (1) an 2 ) a1(1 n (1) a2 n (1) a nn
(k 2,3,..., n)
(3.3)
a11 x1 a12 x2 a1n xn b1 a22 x2 a2 n xn b2 ... ... ... ann xn bn
若 aii 0 (i 1, 2,, n) ,则 (3.4) 的解为
30
(k ) (k ) akk 0 ( k 1, 2,, n 1) .回代过程则要求 akk 0 ( k 1, 2,, n) .
例 3.1 用 Gauss 顺序消去法解线性方程组(计算过程保留 4 位小数)
0.0003x1 6 x2 4.0001 6 x1 9 x2 4
计算结果的误差急剧增大.在这种情况下,可以采用 Gauss 主元消去法.
三、Gauss 主元消去法