内河船舶超限检测系统研究
基于红外图像的内河船舶目标检测技术研究的开题报告
基于红外图像的内河船舶目标检测技术研究的开题报告一、课题背景随着全球贸易的发展,内河航运成为了重要的物流运输方式之一。
在内河航运中,船舶的安全问题一直为人们所关注。
因此,如何有效地进行船舶目标检测和识别,成为了内河航运领域中的一个重要问题。
近年来,红外图像技术逐渐应用于船舶目标检测中。
红外图像是一种可以反映物体红外辐射特征的图像。
相对于可见光图像,红外图像具有不受天气、时间、光照等因素影响的优势,因此能够对于严重的船舶目标检测问题提供更好的解决方案。
二、研究目的本研究旨在通过分析红外图像技术在内河船舶目标检测中的应用方法和现有技术的特点,设计并实现一种高效准确的基于红外图像的内河船舶目标检测技术,进一步提升内河航运安全性和运行效率。
三、研究内容和方法1.分析红外图像技术在内河船舶目标检测中的应用方法与特点。
2.设计和实现一种基于红外图像的内河船舶目标检测技术,包括船舶目标检测预处理、特征提取与分类器设计等。
3.实验验证算法的有效性和准确性,通过与现有船舶目标检测技术进行比较,评估其性能与应用价值。
四、预期结果和意义本研究的预期结果是设计并实现一种高效准确的基于红外图像的内河船舶目标检测技术,明确其技术特点和应用价值。
通过实验验证,证明此技术在船舶目标检测中具有优越性能和实用性,进一步提升内河航运的安全和效率。
五、论文结构本文主要分为五个部分:1.引言介绍内河船舶目标检测的意义和本研究的目的和意义。
2.相关技术分析对红外图像技术在船舶目标检测中的应用方法和特点进行分析,综述已有的船舶目标检测技术。
3.基于红外图像的内河船舶目标检测技术设计详细阐述基于红外图像的内河船舶目标检测技术的设计方法和具体实现过程。
4.实验与评估通过实验验证算法的有效性和准确性,与现有技术进行比较,评估此技术的性能和应用价值。
5.总结与展望总结本文对于基于红外图像的内河船舶目标检测技术的研究。
展望未来,进一步拓展此技术的应用场景和发展方向。
内河航道电子卡口智能监管系统解决方案
内河航道电子卡口智能监管系统解决方案一、背景介绍随着内河航运事业的快速发展,内河航道管理面临诸多挑战,如安全保障、航道环境管理、违规行为监管等问题日益凸显。
传统的内河航道监管模式过于依赖人工巡查,效率低下,监管手段单一,难以满足现代化管理需求。
急需引入智能化监管系统,提升内河航道管理水平,实现全面、高效、可持续的监管。
二、系统目标1. 提升内河航道管理效率:减少人工巡查频次,提高航道监管效率。
2. 改善安全保障:通过实时监控和预警,提高内河航道安全保障水平。
3. 优化航道环境管理:实现对内河航道环境的全面监管和智能化管理。
4. 加强违规行为监管:建立违规行为数据库,加强对违规船舶的监管。
三、系统架构内河航道电子卡口智能监管系统主要包括监控中心、电子卡口设备、终端设备等核心组成部分,其整体架构如下:1. 监控中心:负责系统的整体监管和指挥调度,通过监控中心的系统管理软件,实现对整体系统的监控、管理、分析和决策。
2. 电子卡口设备:布设在内河航道,通过视频、雷达等设备对船舶进行实时监测、识别和数据采集,并将数据传输至监控中心。
3. 终端设备:安装在船舶上,可与监控中心进行实时通讯,传输船舶实时信息,实现船舶动态监管。
四、系统功能1. 船舶识别与监控:通过电子卡口设备对过往船舶进行实时识别和监控,实现船舶动态跟踪和全程监管。
2. 航道环境监测:利用电子卡口设备对航道环境进行实时监测,包括水质、水位、气象等环境因素,提供环境监测数据。
3. 实时预警与应急处理:通过监控中心对监测数据进行实时分析,及时发现异常情况并预警,提供应急处理措施。
4. 违规行为监管:建立违规行为数据库,对违规船舶进行识别和监管,在船舶违规行为发生时及时发出预警,并配合相关部门进行处罚处理。
5. 船舶动态监管:利用终端设备实时监控船舶位置、航行速度、船员信息等,提供船舶动态监管服务。
六、系统优势五、总结内河航道电子卡口智能监管系统是一种创新的内河航道管理模式,具有广阔的市场前景和应用价值。
基于深度学习的船舶检测技术研究

基于深度学习的船舶检测技术研究一、前言船舶检测技术的研究在海事领域具有重要的应用价值。
传统的船舶检测方法依赖于人工监测,难以满足效率和准确率要求。
随着深度学习技术的不断发展,基于深度学习的船舶检测技术成为了研究热点。
本文将对基于深度学习的船舶检测技术进行研究和分析,为海事领域提供有效的探测手段。
二、深度学习技术概述深度学习技术是一种模仿人类大脑神经网络的机器学习技术。
它可以从大量的数据中学习并提取出特征,实现对未知数据的预测和分类。
深度学习技术中的关键技术包括卷积神经网络(CNN)和循环神经网络(RNN)。
其中CNN被广泛应用于图像识别领域,而RNN主要用于自然语言处理领域。
三、船舶检测技术研究现状目前,常用的船舶检测方法有基于特征工程的传统方法和基于深度学习的方法。
基于特征工程的传统方法需要人为地提取图像特征,并在特征空间进行分类。
该方法的精度和鲁棒性依赖于特征提取的准确程度,难以应对复杂的背景和物体遮挡等问题。
基于深度学习的船舶检测方法则不需要人为地提取特征,而是利用卷积神经网络在学习时自动地提取图像特征。
该方法能够克服传统方法的不足,提高检测准确率和鲁棒性。
四、基于深度学习的船舶检测技术研究1. 数据集构建首先需要搜集大量的船舶图像数据,构建适用于深度学习的数据集。
数据集的构建应包含船舶正负样本图像和背景图像。
正负样本应具有丰富的多样性,包括不同种类、不同角度、不同大小和不同背景等。
2. 卷积神经网络模型针对船舶检测问题,可以采用常见的目标检测神经网络结构YOLO和Faster R-CNN进行实验。
相比YOLO,Faster R-CNN在检测准确率和速度上有所提升。
3. 数据增广为了提高训练数据集的多样性,可以在训练前对数据进行增广。
数据增广包括图像翻转、旋转、缩放、平移等操作,可以有效地扩展数据集规模。
4. 模型训练和优化模型的训练需要大量的计算量和时间,通常需要采用GPU进行加速。
在训练过程中,应选择合适的优化算法和合适的学习率,避免过拟合现象的发生。
我国内河小型船舶法定检验的对策与建议
( 以下简称 “6 0 小船 规范 ” 。 )
0/ ̄ 7] D法规 和 0 小船 规范 适 用于 我 国 内河水 \ 6
长 大于 等于 5 m但 小于 2 的 民用船 舶 ( 适 用i 0m 不
船 、 速 船 、 质 船 舶 、 船 、运动 竞 赛艇 等 ) 0 J 高 木 帆 ; 7
“ 7]船 法规 ” 、2 0 年 《 河小 型船 舶 建造 规i 0/ x ) 0 6 内
的 问题 ,从 法定检验 技 术法规和 内河小型船舶 安全 管理
的 角度 ,提 出 了 对 策 和 建 议 。
关键 词 : 内河 ;小型船舶 ;法 定检 验 ;建议
Abs r c :Thi pa r a e n t e p e e t sa u n ta t s pe ,b s d o h r s n t t a d s i e t e r b e eai g t h tt t r u v y o a — d n i d p o l msr lt O t e s u o y s r e f m l — i f n a s l sz d i l n t rv sesi i a p o i e o e me s r s i e n a d wa e e s l n Ch n , r v d s s m a u e a d s g e t n r m h e s e tv ft e t c n c lr l s n u g si s f o o t e p rp c i e o h e h i a u e a d sf t n g me t n aey ma a e n . Ke y wor :i ln t r ds n a d wa e ;
内河船舶载重线检验常见问题及对策
内河船舶载重线检验常见问题及对策作者:杨立清来源:《珠江水运》2012年第09期船舶载重线指船舶满载时的最大吃水线,直接反映着船舶的承载能力,同时也是界定船舶是否超载的重要标志。
载重线检验是内河船舶法定检验的重要内容之一。
笔者在多年的实际工作中发现载重线检验存在着一些问题,在分析总结的基础上,提出了相应的解决对策。
1.检验中常见的问题1.1最小干舷核定不规范《内河船舶法定检验技术规则》(2011)(以下简称“大法规”)第4篇第1章对载重线的勘划提出了明确要求。
该篇通则中规定:如按本篇规定核定的干舷与强度、完整稳性及破损稳性(适用时)所决定的干舷不一致时,应取其中最大值勘划载重线。
但是,在审图或检验过程中,检验人员为了方便往往忽略了强度、完整稳性及破损稳性方面的要求,而只考虑到“大法规”中的最小干舷计算,有的甚至直接选取基本干舷值作为最小干舷,这就使得船舶干舷值过小而影响船舶的航行安全。
1.2载重线的勘划不准确“大法规”对甲板线、载重线标志和载重线勘划位置及免划作了明确规定:“甲板线、载重线标志和载重线应永久地、明显地勘划在船舯两舷。
对于甲板线、载重线标志和载重线的圆环、线段与字母,当船舷为暗色底时,应漆成白色和黄色,当船舷为浅色底时,应漆成黑色。
甲板线、载重线标志和载重线因受护舷材及其他影响不能全部勘划时,允许免划甲板线和部分载重线标志及载重线,但应在载重线证书中注明。
”但在实际勘划过程中存在着以下四方面的问题:(1)载重线标志未采用点焊成型或用钢板制成并且焊接在船舯两舷,而是直接用油漆涂刷甚至用彩色不干胶条粘贴在船舯两舷,未成为永久性标志。
(2)载重线的圆环、线段的宽度达不到或超过25mm;水平线的上缘未通过圆环中心;水平线上缘距甲板上表面的距离与设计干舷值不符;字母 ZC及航区标识距水平线及圆环的相对位置不符合《规则》要求。
(3)载重线标志油漆颜色与船舷底色相近,难以辩认。
(4)对于免划甲板线和部分载重线标志及载重线的,未在载重线证书中注明。
内河航道电子卡口智能监管系统解决方案
内河航道电子卡口智能监管系统解决方案随着内河航运业的快速发展,对内河航道的安全管理和监管工作也提出了更高的要求。
内河航道的特殊性和复杂性,使得传统的监管方式已经无法满足日益增长的监管需求。
利用先进的技术手段,建立内河航道电子卡口智能监管系统已经成为解决监管难题的重要途径。
内河航道电子卡口智能监管系统的建设,将有效提高对内河船舶的监管能力,提高内河航运行业的安全水平,为内河运输行业的发展保驾护航。
为此,本文将从系统的功能要求、技术架构、实施与应用方案以及系统优势等方面,探讨内河航道电子卡口智能监管系统的解决方案。
一、系统功能要求1. 船舶自动识别功能:系统能够自动识别内河航道上的船舶,通过强大的图像识别技术和声纳技术,实现对船只的自动识别,并记录相关船舶的基本信息。
系统还要具备对违规船只的自动报警功能。
2. 航道监控功能:系统能够全面监控内河航道的情况,包括水位、水流、天气情况等因素,确保航道的安全通畅,方便船舶的安全通行。
3. 数据存储与管理功能:系统具备大容量数据存储功能,能够对所有监测数据进行长期存储和管理,并实现对数据的快速检索和分析。
系统能够实现对历史数据的回放功能,并能够生成相关报表和统计分析。
4. 预警与应急响应功能:系统能够实现对突发事件的预警和应急响应,及时发出预警信号,提供相关救援措施,保障内河航道上紧急情况下的安全。
5. 联网通信功能:系统需要实现与相关部门的网络通信功能,包括上级监管部门、港口管理部门和船舶管理部门,以便实现信息的共享和协同作业。
二、系统技术架构内河航道电子卡口智能监管系统的技术架构包括监测设备、传感器、计算机控制中心和通信网络四个方面的组成。
监测设备主要包括摄像头、声纳、监测雷达等设备;传感器负责监测水文气象情况;计算机控制中心则是整个系统的数据处理与控制中心,负责图像识别、数据分析和预警处理等功能;通信网络则是保证系统正常运行的基础,要具备高速、稳定的网络通信能力。
内河船检验典型案例
内河船检验典型案例
内河船检验过程中,发现了一些典型的不合格案例,其中部分案例如下:
- X航XXX轮:该船为内河A级航区散货船,总吨为998,总长63.70m。
该船《船舶检验证书》标明生活污水处理装置型式为“生活污水贮存柜”,集污舱总容积为0.6m³,记事栏记载“该船禁止在内河水域排放生活污水”。
但执法人员发现该船生活污水贮存柜存在诸多问题:
- 未设置液位计或其他等效设施;
- 未设置液位报警装置或其他等效设施;
- 透气管设置存在严重缺陷。
- 经检查,该船设有两个采用普通便具的厕所,但厕所设置的生活污水下水管路未接入生活污水贮存柜而是直通舱底。
- X城货XXXX轮:该船为内河A级航区的一般干货船,总吨位为595,船长48.60m。
该船《船舶检验证书》标明生活污水处理装置型式为“贮存柜”,集污舱总容积为1.050 m ³,记事栏记载“该船禁止在内河水域排放生活污水”。
但执法人员发现该船集污舱实际容积约为0.438 m³,与船检机构签发的《内河船舶防止生活污水污染证书》记载1.05 m³不符;同时该船生活污水贮存柜还存在以下缺陷:
- 未设有液位计或其他等效设施;
- 未设有液位报警装置或其他等效设施;
- 未设有透气管;
- 排放管路中未设有将生活污水排往接收设施的动力装置。
- X关货XXXX轮:该船为内河A级航区散货船,总吨为993,总长63.8m。
该船《船舶检验证书》标明生活污水处理装置型式为生活污水贮存柜,型号为“SWCH-0.6”,集污舱总容积为0.6m³,记。
内河航运船舶监控系统设计
内河航运船舶监控系统设计郭浩;孟哲【摘要】为了保障水路航运的安全,提出了1种船舶监控系统方案,系统主要分为船舶远程监控、网络传输、监控中心等3个部分;系统综合应用先进的视频监控、全球卫星定位、无线通信、地理信息,数据库等技术,实现对运输船舶的位置、船舶运行状况以及安全信息的在线实时监控,提高船舶营运的安全性和可靠性,达到利用现代信息网络技术进行船舶运输高效管理的目标.%In order to guarantee the safety of waterway shipping, a scheme of ship monitoring system is put forward. The system is divided into three parts: ship remote monitoring system, network transmission, and monitoring center system. The system combines the advanced video monitoring, globai positioning system, wireless communication, geographic information system and database technology, and achieves the on-line real-time monitoring of transport ship's position, operation and safety information. As a result, the ship's safety and reliability in operation have been improved. By making use of the modern information network technology,the system can achieve the goal of highly efficient management for transport ships.【期刊名称】《交通信息与安全》【年(卷),期】2012(030)005【总页数】4页(P122-124,105)【关键词】视频监控;船舶;安全;网络【作者】郭浩;孟哲【作者单位】武汉理工大学信息工程学院武汉430070;武汉理工大学信息工程学院武汉430070【正文语种】中文【中图分类】U676.11 系统构成分析为了保障水路航运的安全,尤其是在春运等流量大,业务繁忙的时候,迫切的需要实时了解轮船在航行中的各种状况,内河船舶监控系统通过本地监控录像和无线图像传输,可以使船员和岸上管理人员了解轮船运行的全部过程,保证轮船的安全运行。
典型内河过闸运输船舶标准船型主尺度系列研究
一、主尺度系列的生效由全国内河船标准化技术委员会归口上报,交通运输2019年9月17日,交通运输部印发《交通运输部关于做好<内河过闸运输船舶标准船型主尺度系列>国家标准落实工作的通知》(交水函〔2019〕661号),要求自文件印发之日起至2020年1月31日,国内水路运输经营者新(改)建过闸运输船舶可自愿选择申请按当时现行的内河过闸运输船舶船型主尺度规定,即《交通运输部关于公布长江水系过闸运输船舶标准船型主尺度系列及有关规定的公告》(2012年第69号,简称长江水系《2012主尺度系列》)和《交通运输部关于公布京杭运河、淮河水系过闸运输船舶标准船型主尺度系列及有关规定的公告》(2012年第73号,简称京杭运河淮河水系《2012主尺度系列》),或是按《2019主尺度系列》规定执行。
《2012主尺度系列》于2012年12月25日由交通运输部发布,2013年4月1日起实施。
二、主尺度的定义假定本文选取的典型船最大船长L E =52.8 m,总长L OA =52.67 m,最大船宽为10.8 m,船宽B=10.6 m,船壳板、护舷材厚度均为10 mm,护舷材净宽度(不含船壳板、护舷材厚度)为80 mm。
(一)最大船长和总长《内河船舶法定检验技术规则(2019)》定义最大船长L E :指船首最前端到船尾最后端之间的水平距离,包括外板和船首尾两端结构性突出物(如舷伸甲板、护舷材、舷墙、假首、假尾、顶推装置等)在内,活动突出物(如跳板、起重吊臂、输送装置等)根据航行状态的情况计量[1]。
典型内河过闸运输船舶标准船型主尺度系列研究典型Series Research on Standard Ship Type Dimensions of the Typical Inland Water Lockage Transit Ship(扬州市船舶检验局,江苏 扬州 225009)为推进内河过闸运输船舶船型标准化,选取一艘典型内河过闸运输船舶,对新版《内河过闸运输船舶标准船型主尺度系列》进行深入剖析,讨论了主尺度系列总长总宽的定义,比较了新旧主尺度系列的浮动范围,明确了新版主尺度系列的认定标准,对主尺度系列实施过程中存在问题提出了合理化建议,有利于更好地宣贯实施新版主Abstract : To standardize the type of transportation ships passing lockage in inland waters, the paper, taking a typical ship as an example, probes into the new version of the Main Dimension Series of the Standard Type of Transportation Ships Passing Lockage in Inland Waters, and studies the definition of overall length and overall width in the main dimension series. It also compares the floating domain between the new and old version of main dimension series, sets the standard for the determination of dimensions in the new version, and puts forward suggestions for the problems existing in the implementation of the series, aiming at more effective publicity and implementation of the new version of main dimensions. Key words : Transportation ship; standard ship; main dimension series中图分类号: U692.7 文献标志码:A 文章编号:1673-2278(2021)05-0033-03YIN Ye-ting (Yangzhou Ship Survey Bureau, Yangzhou, Jiangsu 225009, China)收稿日期:2020-07-20;修回日期:2021-02-19作者简介:殷业廷(1986—),男,山东蒙阴人,硕士研究生,工程师,主要从事船舶检验和图纸审查工作。
视频检测系统在我国内河航运的应用分析
I
音频测 卜 视检 \▲
\ 、
GS P 采集
l
L—— j
} /
— 数据
无 线
收 集
■~ 备 I— 传输 一' 设
传 器 测 感 检 l /
I
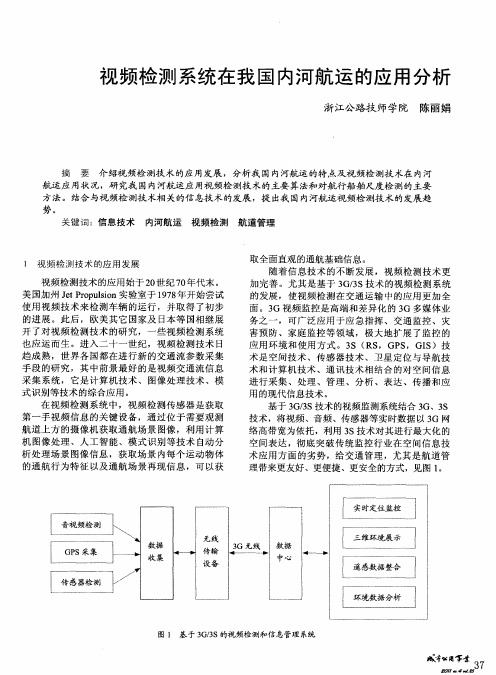
图 1 基于 3 /S的视频检 测和信 息管理系统 G3 甩 孳 3 7
,
e !一 坩£ Og 置F
视 频检 测系统 在我 国 内河航运 的应用分析
浙江公路技 师学院 陈丽娟
摘 要 介 绍视 频检 测技 术 的应 用发 展 ,分析 我 国 内河航运 的特 点及 视 频检 测技 术在 内河 航运应用状况,研究我 国内河航运应用视频检 测技术的主要算法和对航行船舶尺度检测的主要 方法。结合 与视频检 测技术相 关的信 息技术的发展 ,提 出我国内河航运视频检测技术的发展趋 势。 关键词 :信 息 技术 内河航 运 视频检 测 航 道管 理
求:
上 ,通 过 一 定 范 围航 道 内船 舶 数 量 、 吨位 规 模 及 拥 挤 检 测 算 法或 模 式 识 别技 术 ,得 出是 否产 生拥 挤 、拥 挤 发 生 的潜 在 地 点 、 时 间及 可 能 导致 的严 重程 度等 信 息 ,为 疏 导拥 挤 、有 效 响 应 等提 供 实 时的航道 交通 资料 。 25 信 息发 布 . 向船 舶及 船 公 司提 供 实 时 的航 道信 息状 况 。 视 频 检 测系 统 检 测 数据 库 既 可 以提 供 定 量 的航 道 交 通 信 息 ( 某 航 段 内的 船 流 密 度 、 航 行 时 间 如 等 ), 也可 以提 供 定性 的航 道状 况 描 述 ( 事故 、 拥 挤 程 度 、雾 、水深 变 化 等 ) ,能够 针 对 不 同要 求 提供 较 为广泛 的信 息服 务 。
内河航道电子卡口智能监管系统解决方案
内河航道电子卡口智能监管系统解决方案内河航道电子卡口智能监管系统是一种基于信息化技术的智能化监管系统,主要运用了人工智能、物联网、云计算、传感器技术等多种技术手段,实现对内河航道船舶的全面监管,提高了船舶的安全性和运输效率。
系统架构内河航道电子卡口智能监管系统主要由六大模块组成:传感器采集模块、本地数据存储模块、云端数据处理模块、预警提示模块、数据查询模块和报告生成模块。
传感器采集模块主要负责收集内河航道船舶的信息,包括船舶载重、长度、宽度、高度、应速度等重要参数。
本地数据存储模块主要将采集到的数据存储在本地,以备后续的分析和比对。
云端数据处理模块则主要承担将本地数据上传至云端进行分类、分析、计算和统计分析等工作。
预警提示模块负责判断船舶是否超过了允许的载重、长度、宽度、高度等限制,若超过则自动发出警报提醒船员或相关人员采取相应的措施。
数据查询模块则为用户提供了对历史数据和实时数据的查询功能,为后续的分析、比对和统计提供便利。
报告生成模块主要是将查询到的数据,经过格式化处理后生成各种报表和分析结果。
系统实现1、智能分析数据:内河航道船舶信息采用传感器自动采集,通过智能算法分析对内河航道船舶的速度、载重、长度、宽度、高度等信息进行评估,及时提醒船员或相关人员采取必要的措施,避免违反相关法规。
2、实时监测:系统可以实时监控船舶的状态,及时掌握船舶的运营情况,对异常情况进行快速响应,实现船舶信息的即时更新和全面监管。
3、数据联动:系统可以与其他监管系统进行数据联动,方便标识内河航道船舶的位置、速度、航向等信息,避免因信息不统一造成的误判。
4、云平台服务:内河航道电子卡口智能监管系统具有云计算、云存储、云分析等能力,可以实现大数据的处理和分析,为系统用户提供全方位服务和数据统计。
系统优势1、实现了对内河航道船舶的全方位监管,提高了船舶的安全性和运输效率;2、系统采用的传感器设备具有高度的精度和稳定性,具有极高的数据采样精度,保证了数据采集的质量;3、系统运用了智能算法提取和分析数据,可以有效监测船舶的状态,及时发出预警,增强了安全性和管控能力;4、系统拥有云平台能力,可以扩展和升级功能,满足多样化的用户需求。
内河航道电子卡口智能监管系统解决方案
内河航道电子卡口智能监管系统解决方案随着内河运输的不断发展,内河航道管理和监管愈发重要。
内河航道的安全和畅通直接影响着国家经济的发展和社会的稳定。
传统的监管手段已经无法满足日益增长的监管需求,因此需要引入电子卡口智能监管系统来提升内河航道管理和监管的效率和精度。
一、当前内河航道管理存在的问题1.传统监管手段效率低下传统的内河航道监管主要依靠巡逻和人工巡查,监管人员需要花费大量的时间和精力进行巡逻和现场监管,效率低下。
2.监管数据不精准传统的监管手段容易受到人为因素的影响,监管数据的真实性和准确性无法得到保障,容易出现监管死角和监管盲区。
3.监管成本高昂传统的监管手段需要投入大量的人力物力,监管成本较高,并且容易出现监管漏洞,难以做到全面监管和覆盖。
为了解决当前内河航道管理存在的问题,我们提出引入内河航道电子卡口智能监管系统来提升管理和监管的效率和精度。
内河航道电子卡口智能监管系统主要包括卡口设备、监管平台和数据采集中心三部分。
1.卡口设备内河航道电子卡口智能监管系统的核心是卡口设备。
卡口设备主要包括视频监控设备、车辆识别设备和传感器设备。
视频监控设备用于对航道进行全天候的监控,车辆识别设备用于识别通过航道的船只和船舶信息,传感器设备用于监测航道的水文参数和气象参数。
卡口设备通过联网和数据传输,能够实现对航道的实时监控和信息采集。
2.监管平台内河航道电子卡口智能监管系统的监管平台是系统的管理和指挥中心,主要包括监管指挥中心和监管数据中心。
监管指挥中心通过监控和管理卡口设备,对航道进行远程监管和指挥调度。
监管数据中心用于对采集的航道数据进行处理和分析,生成监管报告和分析报告,为决策提供科学依据。
3.数据采集中心内河航道电子卡口智能监管系统的数据采集中心是系统的信息采集和存储中心,主要用于接收、存储和管理卡口设备采集的监管数据。
数据采集中心可以对航道监管数据进行统一管理和存储,方便监管人员进行检索和查询。
内河船舶营运检验常见问题及分析

摘 要:对内河船舶营运检验中所遇到的常见问题进行归纳汇总,分析缺陷存在的原因,提出了检验要点和缺陷处理措施,以使船舶满足相应法规规范的要求。
关键词:内河船舶 检验常见问题 分析1.引言内河船舶具有种类多、数量大、吨位小等特点,内河船员大多文化水平不高,对法规规范不是很了解甚至是不知道有相应的法规规范标准,再有内河船舶修造厂、内河船舶设计部门等相关单位的准入门槛低,多方面因素综合起来导致内河船舶技术状况呈现出参差不齐的现象,部分低质量船舶很难完全满足现行法规规范的标准,笔者对日常检验中常发现的问题进行归纳,分析缺陷存在的原因,提出了检验要点和缺陷处理措施,以使船舶满足相应法规规范的要求。
2.常见问题及解决方案(1)油舱透气管缺陷存在的主要方式:燃油舱柜透气管的管端位于机舱内,且未设防火网或燃油舱柜未设置透气管或燃油舱柜所设置的透气管被盲板封死。
分析缺陷及消除隐患:在船舶设计建造时由于船舶设计方或船舶建造方等原因而使得燃油舱柜透气管的布置情况不能够满足现行法规规范的要求,还有一种情况就是内河船舶上的船员素质普遍偏低,他们完全不懂得透气管存在的意义及重要性,常常为了他们工作以及生活方便等原因而把透气管给截断然后用盲板封死。
按照法规规范的要求应采取如下措施来消除该隐患:设置引至甲板开敞部分的燃油舱柜空气管,且透气管需设置满足法规规范要求的耐腐蚀和便于更换的金属防火网。
(2)通向机舱花钢板的带有扶手的金属梯道缺陷存在的主要方式:船长超过20m的船舶 ,仅设有 1个通向机舱花钢板的带有扶手的金属梯道。
分析缺陷及消除隐患:多数情况是船方为了节约机舱空间,而只设置一具金属梯道。
内河法规明确要求机舱至少应有两个通向干舷甲板的出入口,且出入口应有通向机舱的带有扶手的金属梯道,梯子与花钢板的倾角不得大于 65°。
船长小于等于30m 的船舶,其机舱的梯道允许其中一个为直梯。
船长小于 40m的船舶,若机舱的两个出入口之间有格栅联通,则可仅设一个带倾角有扶手的梯道。
基于激光扫描的船舶超载超吃水自动监测系统
基于激光扫描的船舶超载超吃水自动监测系统赵永富;葛鸣明;刘善成【摘要】近年来,内河干线航道超载、超吃水现象较为严重,船舶搁浅、碰撞等水上交通事故时有发生.而目前相应的治理手段单一,尽管相关部门投入了巨大的人力、物力、财力,但效果也并不理想.设计并实现了一套基于激光扫描和视频分析的船舶超载超吃水自动监测系统,并在镇江市地方海事局辖区水域实现了应用.结果表明,实际应用中系统在测量精度、实时性等方面表现优异,能够满足海事部门的日常监管需求.%In recent years, overload and overdraft phenomenon is more and more serious in inland waterway, and many traffic accidents have occurred from time to time, such as stranding, collision, etc. The corresponding management approach is simple, although the relevant departments have invested huge human, material and financial resources, but the effect is not satisfactory. Based on laser scanning and video analysis, an automatic overload and draft monitoring system is designed, and it is applied in the water areas of Zhenjiang local maritime bureau. The result shows that the system performs excellently in accuracy and real-time etc. in application. And this system can meet the needs of the daily supervision of maritime department.【期刊名称】《计算机系统应用》【年(卷),期】2017(026)006【总页数】6页(P40-45)【关键词】船舶超载;船舶超吃水;干舷高度;激光扫描;视频分析【作者】赵永富;葛鸣明;刘善成【作者单位】镇江市地方海事局, 镇江 212002;镇江市地方海事局, 镇江 212002;镇江市地方海事局, 镇江 212002【正文语种】中文近几年, 受流域经济发展、船舶运营成本及船舶配载管理等因素影响, 内河船舶运输超载、超吃水现象有大幅反弹的趋势, 给水上运输安全带来了严重危害[1]. 船舶超吃水是指船舶实际吃水超过航道实际维护水深(航道每周维护尺度预报信息)和规定富余水深之和. 这些船舶犹如一颗颗随时可能发生爆炸的“水雷”, 在靠、离码头、调整航向、掉头或是与其他船舶、水上设施等相遇时, 驾驶员操作稍有不慎, 就容易发生搁浅事故, 对船员的人身和财产安全造成严重威胁[2]. 而且船舶一旦发生搁浅, 很容易就会造成航道阻塞甚至断航状况, 给航道的畅通和安全带来严重不利影响.目前治理超载、超吃水的措施主要是靠海事人员驾驶海巡艇到违章船舶上进行现场勘查, 核对船舶干舷高度、吃水深度. 对停泊的船舶比较容易勘验, 若船舶正在航行途中, 虽然有违章, 但对船舶进行拦截检查仍会带来较大的安全风险. 船舶必须要停靠下来, 海事人员再上船人工勘验[3], 这样不仅效率低下, 而且也十分不便, 无形中大大增加了人力、物力、财力的管理成本. 而且对于夜间、雨雪冰冻等天气条件下, 单靠人工治理将变的更加困难.鉴于人工测量方法的诸多弊端和局限性, 国内外很多科研部口开始投入大量的精力研制新的自动吃水检测方法, 这些新型的方法有各自的技术突破, 但是也有着不可避免的弊端. 现有的船舶超载、超吃水自动检测方法主要分为三类:一类是通过在船舶上安装特定的传感器进行检测[4,5]. 该类方法缺陷明显, 船主为了超载谋利会想方设法的破坏或影响安装在各自船舶上的传感器的工作状态, 从而使得测量的数据的准确性无法得到保障.另一类主要依靠视频分析进行超载测量[6], 如基于DSP的船舶水尺检测系统[7].这类方法仅仅依靠视频分析来进行测量, 很难达到较高的测量精度, 且测量结果容易收到天气状况、光照条件等因素的影响.还有一类是基于声呐、超声波阵列等技术的水下测量方法[8,9], 该类方法覆盖范围全面, 精度高, 但设备在水下容易受水底砂石、水草等杂物影响, 需要定期清理.针对现有的技术缺陷, 本文设计并实现了一套基于激光扫描和视频分析技术的船舶超载、超吃水自动监测系统, 利用激光穿透雾、烟、灰尘的能力强, 具有高测量精度、全天候、全天时的工作特点, 并结合视频分析来加强测量系统的准确性.3.1系统适用的外部条件本系统的检测设备适宜布设在航道的桥梁下方(见图1), 例如水面宽度为100m, 需要安装4个激光传感器实现全区域的覆盖, 同时借助两个摄像机实现对上、下水船舶的监控及图像取证, 最终实现过往船舶的干舷高度的自动测量、船舶超载、超吃水的自动预警.船舶干舷高度泛指船舶浮于静止水面时自水面至露天甲板上表面舷边处的垂直距离. 船舶的吃水深度是指船舶的底部至船体与水面相连处的垂直距离, 它间接反应了船舶在行驶过程中所受的浮力.系统采用机械式带高精度云台的激光雷达作为船舶吃水监测的核心设备, 传感器通过船舶剖面测量, 快速获取船体的剖面图像数据, 继而测量出当前船舶与桥梁的距离和吃水状态, 并将船舶的实际吃水深度与该船核定吃水深度进行比对, 智能判断出该船是否超载、超吃水. 若发现船舶发生超载或超吃水行为, 系统将自动将采集到的数据和图像信息保存到中心数据库, 并联合警示系统做出相应的报警处理.3.2系统设计系统主要由两个部分组成: 前端数据采集系统和后台分析、查询服务系统. 整体部署图如图2所示.前端采集系统是整个系统运行的基础数据和信息来源, 借助视频监控摄像头和激光传感器完成实时船舶监测数据的采集; 后台分析、查询服务系统是系统核心部分, 通过对前端采集到的各类数据借助相关算法计算出船舶干舷值, 作出相应的船舶超载、超吃水预警. 系统整体功能结构示意图如图3所示.前端采集系统的主要构成包括船舶外形扫描的激光传感器、高速智能云台和高清智能追踪摄像机等主要设备安装于航道水域的监测点, 它们是整个系统正常工作的信息源部分, 为视频分析、干舷测量、数据分析提供元数据. 通过在电子航道图中预设监控线, 并将监控摄像头对准监控线区域. 一旦发现有船舶进入该监控线监控区域时, 配合采集到的船舶AIS信号, 实时获取当前船舶的静、动态数据, 包括船名、船舶型号、经纬度坐标、航向、航速等信息, 以确定该船舶是否驶入监控区域, 然后向监测系统各设备发出船舶进入监控指令. 针对AIS设备关闭的船舶, 我们利用视频监控及激光传感器获取船舶的图像数据和航速、航向等信息, 同时向系统发出船舶进入监测区域的指令. 指令发出后, 开启激光扫描程序. 为了减少摄像机所用数量, 简化传输、控制和显示系统, 我们在摄像机上加装了智能的、可遥控的、可变焦距镜头, 使其能观察的图像分辨率更高, 捕捉图像的速度更快. 同时借助控制器, 可以实现摄像机的横向、纵向的旋转, 达到覆盖角度、面积更大的目的.为了保证系统从监测现场航道水域采集回传信息, 摄像机回传现场实时图像, 激光传感器采集目标船舶的测量元数据等信息交互通道顺畅, 确保各类数据快速有效、安全稳定的传输至后台分析、查询服务系统, 我们采用了高强度耐候性光钎.后台分析、查询服务系统是整个系统的指挥中心, 主要由数据监测控制报警系统组成. 主要功能包括: 测量数据与图像信号分配与放大、数据的校正与补偿、信号切换等; 对带高精度云台的激光传感器、摄像机、电动变焦镜头等设备的控制; 对系统防区的布防和撤防等功能. 系统实现了按需控制传感器设备, 获取视频信号、传感器数据, 运用算法分析视频、处理传感器数据, 计算输出干舷值, 存储关联的系统和业务数据, 提供授权的查询服务, 并可与警示系统对接, 实现实时有效提醒, 成为辅助工作人员日常执法工作利器.3.3工作流程1) 根据实际需求, 架设前端采集设备, 设置电子航道图中对应的监控线位置. 利用视频监控实时地分析监控视场范围内的移动目标, 排除、过滤各种干扰因素, 如飞鸟、风浪、水面反光等无效目标, 正确地识别出有效目标——经过船舶, 断定其航向. 当目标船舶穿过预置的监控线时, 触发激光测量模块进入工作状态, 同时对经过船舶拍照取证, 存储图像文件.2) 收到来自视频分析模块的触发请求后, 立即启动高精度云台带动激光传感器做扇形测量扫描, 经过上百个周期后, 读取返回的大量元数据, 据此重构出船舶的三维立体模型, 应用计算模型去掉船头、船尾部分, 在保留船身部分找出一条船舷拟合的直线, 再使用几何代数方法取得船身最低点, 结合传感器至水面高度, 测算输出船舶干舷高度. 具体计算过程如图5所示.测距传感器接收到“船舶进入”的监控指令后, 测出桥梁到水面的高度h1, 带云台的传感器以角度r向下扫描监测船舶, 得出其与甲板之间的直线距离s, 再结合AIS信号接收器提取出的船型深度h3(未开AIS设备船舶, 选用视频监控图像分析出的船舶甲板高度), 后台控制部分即可计算出: 桥梁到船舶甲板的高度, 船身干舷高度,则得到船舶实际吃水深度:3) 结合从AIS获取的船舶基本信息, 船舶实际吃水深度与船舶核载吃水深度、航道警戒吃水深度等数据, 判定船舶是否超载或超吃水. 若比较得出船舶实际吃水深度h 大于该船舶核定吃水深度, 则向船舶监测部分发送数据控制信息, 将船舶超载超吃水数据信息和图像信息保存到数据库中同时触发警示设备对该违规船舶发出警示信息; 若船舶实际吃水深度h小于该船舶核定吃水深度则整个系统进入待机监测状态, 等待下一个船舶的驶入.4.1 示范应用概况船舶超载超吃水自动监测系统于2015年9月份在镇江市地方海事局辖区金港大桥安装测试, 并在2015年11月中旬正式调试运行. 系统实际安装情况如图6所示. 其中涉及的硬件配置如表1所示.该套检测系统的整体花费要比传统的DSP水尺检测系统要高但检测精度也更高, 与基于声呐、超声波阵列等技术的检测系统相当, 但是相较于需要水下安装检测设备的检测技术, 该套系统的日常的巡检、清理、维护工作更加方便, 成本更小.系统显示自动监测结果列表界面如图7所示. 我们选取了同一艘重点监控船舶, 不同日期不同时间的监测结果, 如图8和图9所示, 显示不论是在白天还是夜间对船舶干舷高度和图像取证都有较好的监测效果.我们选取了2015年12月1日~2016年6月1日6个月内监测系统产生的数据, 并进行了分析, 共检测下水船舶60346批次, 有效记录50012条, 涉及船舶2892艘, 检测出超载、超吃水船舶198艘, 占整个船舶检测数量的6.85%, 船舶超载超吃水监测系统的精确度、可靠性都有较好的保障.4.2 应用效果系统在实际应用中效果显著, 在测量精度、实时性等方面有比较好的表现. 我们随机选取了20艘船的某次下水航行过程中经过系统时测得的干舷高度, 并与实际登船测得的干舷值进行了比对.通过表2, 我们可以看出, 系统的测量精度大部分情况下可以控制2cm之内, 最差不会超过3cm. 由于船舶受大风和波浪的影响, 船舶甲板和水平面之间的高度是随时发生变化的. 因此在实际应用中, 船舶的测量值和真实值之间的误差允许在2cm 范围内. 因此根据该准则, 这一批次的船舶干舷测量准确度在 95%以上.图10是从2015 年 12月份到 2016年6月份的实际船舶干舷值测量的误差结果. 从图中可以看出测量误差小于1cm的船舶占全部船舶的68.3%; 测量误差在1cm到2cm 的船舶占全部船舶的26.5%; 最后测量误差大于2cm(即测量不准确情况)的船舶占全部船舶的5.2%.其中, 在天气比较恶劣, 船舶易发生较为严重的横摇、纵摇以及变形等情况时, 对未开启AIS的船舶, 由于无法直接获取到船舶型深h3的准确数据, 单单依靠视频分析可能会产生一定的误差(1-3cm), 进而影响整个船舶吃水深度测量的准确性, 我们一方面优化系统计算模型自动过滤明显错误的数据, 另外一方面在发现船舶超载超吃水时, 系统自动发出警报提醒值班人员, 采用人工确认、修正等方式提高系统的准确率.目前, 本系统已经连续运行近一年时间, 平均每天检测下水船舶87 余艘, 平均检测一艘船舶需要 97 秒, 平均检测误差为0.23 cm, 每天的误报率小于1%, 满足用户对检测系统的要求, 且系统运行稳定可靠.针对内河干线航道近些年来“超载”“超吃水”泛滥这一问题, 本系统实现自动检测船舶吃水、干舷, 判断船舶是否超限、超载, 并拍照取证功能. 该系统可以布设在航道的桥梁下方, 实际应用中具有测量精度高、实时性好、监测速度快等优点, 可有效遏制船舶超载、超吃水现象, 保护航道资源及通航安全, 对船舶干舷高度测量、实时超载超吃水监测等方面的研究和应用有着重要的参考意义.1 毕方全,梁山.船舶超吃水航行动态检测方法研究.中国水运,2011,11(7):1–3.2 罗宁.内河船舶吃水自动检测装置研究及应用前景.中国水运,2012,12(2):86–88.3 朱四印.船舶动态吃水实时检测与数据处理关键技术的而研巧[硕士学位论文].大连:大连海事大学,2011.4 Ran X, Peng JH. Ship Draft Mark Recognition based on image processing .Journal of Shanghai Maritime University, 2012, 33(2): 5–9.5管利广,祁亮,徐小雯.内河船舶吃水及装载状态监测系统研究与设计.中国水运,2015,15(12):82–84.6 Ran X, Shi C, Chen J, et al. Draft Line Detection based on image processing for ship draft survey. Proc. of the 2011 2nd International Congress on Computer Applications and Computational Science. German. Springer. 2012. 39–44.7 顾婷婷.船舶吃水检测系统的设计[硕士学位论文].南京:南京理工大学,2012.8 Wu J, Wang X, Zhang T. Ship target detection and tracking in cluttered infrared imagery. Optical Engineering, 2011, 50(5): 5–12.9 陈德山,朱剑华,李吉祥,陈先桥.基于多波束仰扫的内河船舶吃水检测技术.水运工程,2016,(1):152–157.。
限制超标准船舶在内河航道中航行(论文)
限制超标准船舶在内河航道中航行曹建中南通市航道管理处【摘 要】超标准船舶在内河中航行,对航道设施造成了各种损害,并易造成航道的堵档,对社会建设产生不利影响,必须加以限制,以形成水运市场的有序可持续发展。
【关键词】限制;超标准;大型船舶;内河航道;航道设施由于船舶大型化的发展,目前各内河均有大量超标准的船舶航行,对航道设施造成了各种损害,特别是对船闸设施的损害尤其明显。
南通市航道系统辖有五所船闸,在船闸职工的精心养护下,各船闸的门体结构、机电设备均处于良好的状态。
主体建筑物结构稳定,但有局部损坏,个别船闸助航设施损坏严重。
笔者在此结合主要二座船闸的现状,对超标准船舶过闸产生的危害作些分析,及如何保护船闸设施提出一些建议,以和大家共同探讨。
一、船闸的设计标准及过闸的最大船型通过对二座船闸过闸船舶的资料分析,超标准船舶占过闸船舶总量的百分之六十以上,各种参数均大于船闸的设计标准,从而造成船闸的超标准使用,对船闸的设施造成损坏。
表一为船闸的设计标准和目前过闸最大船舶的资料。
表一 船闸的设计标准和目前过闸最大船舶船闸名称船闸尺寸(米)(长*口门宽*门槛水深)设计过闸船舶的船型(米)(长*宽*设计吃水)及载重吨位目前最大超标准过闸船舶的船型(米) (长*宽*吃水)及载重吨位南通船闸160.0×12.0×3.345.0*7.3*1.9500T级72.0×11.6×4.11500T九圩港船闸220.0×16.0×3.345.0*7.3*1.9500T级64.36*11.45*3.61120T二、船闸工程设计中对过闸船型的规定船闸使用过程中的过闸船型,为工程设计标准中考虑的主要参数之一,相关规范均有明确的设计标准,现摘录介绍如下:1.在《船闸总体设计规范》(JTJ 305-2001,2002-01-01实施)中,第3.1.8条的描述为:船闸闸首口门和闸室有效宽度不应小于按公式(3.1.8-1)和公式(3.1.8-2)计算的宽度,并宜采用现行国家标准《内河通航标准》(GBJ139)中规定的8m、12m、16m、23m、34m宽度。
内河航道电子卡口智能监管系统解决方案

内河航道电子卡口智能监管系统解决方案随着内河运输的不断发展,内河航道的安全管理也变得越来越重要。
在内河航道管理中,电子卡口智能监管系统可以帮助管理方实现对内河航道的全面监管和管理,这对于保障内河运输安全和提高内河运输效率具有重要作用。
本文将介绍内河航道电子卡口智能监管系统的解决方案。
内河航道电子卡口智能监管系统是一种全新的内河航道管理方式,它基于智能卡口技术,结合了视频监控、车辆检测、数据传输等多种技术,实现对船舶的实时监管、安全管理和信息处理。
1. 实现进入和离开内河航道的船舶的实时监管,确保船舶的安全和规范通行。
2. 对船舶的重要信息进行收集和处理,包括船舶的航行路线、航速、载货量等信息,并将这些信息传输到管理中心进行分析和处理。
3. 对内河航道的交通状况进行实时监控和管理,以便根据实际状况调整航行计划,减少交通拥堵和事故的发生。
内河航道电子卡口智能监管系统的技术架构主要包括传感器、智能卡口、通信网络、监控中心以及数据处理系统等关键部分。
其中,传感器主要用于获取船舶信息,智能卡口则用于对船舶进行检测和监管,通信网络则用于数据的传输和交流,监控中心则是对整个系统的管理和调度中心,数据处理系统则是对船舶信息进行分析和处理的关键部分。
1. 提高了航行安全性:通过对船舶的实时监管和管理,能够保障航行安全,减少事故发生的可能性。
2. 提高了内河运输效率:通过对内河航道的监控和管理,可以调整航行计划,减少交通拥堵,从而提高内河运输的效率。
3. 提高运输物流信息化水平:通过对船舶信息的采集和处理,以及对内河航道交通状况的监控和管理,能够提高运输物流信息化水平,从而为内河运输的发展奠定坚实的基础。
内河航道电子卡口智能监管系统已经在国内多地逐步推广和应用,其中比较典型的案例包括:1. 长江水运干线船舶智能化监管系统:该系统是在长江水运干线上推广应用的,通过对船舶的实时监管和管理,提高了长江水运干线的运输效率和安全性。
内河渔船检验存在的问题及对策_调查报告.doc
内河渔船检验存在的问题及对策_调查报告
从目前对内河(内陆)水域渔船的检查来看,主要存在以下问题:
1.根据《中华人民共和国渔业船舶检验条例》(以下简称《条例》)的规定,建造渔船必须要求渔船船厂经渔船检验机构批准并使用经批准的海产品。
然而,目前杭州只有一个经财政部和省局批准的渔船造船厂,95%以上的渔船,无论是机动或非机动的,都是由渔民承包商、专业户、渔民和农民建造的。
因此,《非法船舶行政许可法》与《渔业船舶检验条例》的学习有机结合,使主管部门、业务部门和广大渔船检查员能够正确理解《行政许可法》和《渔业法》的立法意义和目的、设定原则、范围和权限,学会正确适用行政许可实施程序。
并指导渔船的检查和监督管理工作,要明确意识到安全是重中之重,安全责任比泰山更重要,要以渔(农)民生命财产高度负责的态度,践行“三个代表”重要思想,服务渔民,服务渔业。
(余永田,浙江省渔业局杭州检验办公室)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关键 词
船 舶超 限检 测 超 高检 测 超 长超 宽检 测 吃 水 深度检 测
1 研 究 目的 、 内容
水 路 运输 是 我 国综 合 运 输 体 系 中重 要 的组 成
通过 激光 对射 检测 方式 对超 限船舶 进行 准确 检 测. 采用单 光束 激光 对射 . 探 测距 离可根 据现 场水 域
件, 能对航 宇重 工和 蛟龙 重 工过 往船 舶进 行 实时长 宽检 测 。 并 获取相 关信 息 . 对 于超过 设 定 长 宽的
船 舶将保 存视 频 图像 , 声 音提 示报 警 , 并输 出相 关数 据 。文章研 究的样 本和 场景 主要 采用 南通 海事
局提 供 的相 关视 频 源和相 关 港 口
各 种 报 警 装 置 值 班 制 室
( 4 ) 信 号传 输 系统 。 可 根据 实 际情 况通 过有 线或 无线 方式 把激 光 检测 的信 号传输 给报 警系 统
( 5 ) L E D情 报板 。通 过 与 报警 系统联 动 的 L E D 情报 板 对船舶 进行 文字 提 示 .可 有效 避免 因船舶 舱 内噪音 而无 法听 见语音 提示 的情 况 . ( 6 ) 监控 摄像 机 在 激 光检测 装置 附近 安装 视频 监控摄像头 . 与报警系统联动 , 对超 限船舶进行 录像 。
超 声 波 技 术 的船 舶超 限检 测 系 统 ” .主要 研 究 内容
包括 :
( 1 ) 基 于 视频 的船 舶超 宽检 测 研 究 图像 处理 技 术 .运动 船 舶 的识 别 提 取 . 为 后 续 交 通 流参 数 、 异 常事 件 检 测 提供 对 象 依 据 。利
长超 宽检 测 、 船舶 吃水 深度检 测 、 声光报 警 和控 制室
2 2 6 0 0 0 )
研 究定制 了一 台视 频 流转 码 网 关 , 将科 达 视频 流 转成 标 准的 H 2 6 4格 式 . 使 得 第三 方 系统
能够读 取 转码 后 的视 频 流 . 克服 了科 达视 频 流 不开 发 的疑难 问题 视 频 超 长 高检 测 已完成 示 范软
信息 处理 , 如图 1 所示。 船舶 超 限检测 系统 实 时检测
船 舶 的长 、 宽、 高 及 吃水 深 度 , 并 将这 些 值 与 预先 设
置 的阈值进 行 比较 . 判 断是否 超 限 . 对超 限 的异 常事 件 通 过监控 网络发 布水 路交通 告警 信息 .对 某些 较
用 图像处 理 、 摄像 机标 定 、 智 能识 别 等技 术 , 可 以实 时、 准确 、 可靠 地 获 得 流量 、 船长 、 船 宽 等 交 通 流 数 据. 确保 了后续 数据 分析 挖掘 的可靠性 ( 2 ) 基 于激 光技 术 的船舶 超 高检测
( 3 ) 供 电 系统 在有 条件 的地点 采用拉 电源线 的
方式 进行 供 . 对于 没有 条件取 电的地点 . 通过 太 阳
能方 式 对室 外设 备进 行供 电 . 为避 免停 电或 连续 阴
雨天 造 成检 测设 备无 法 正常 丁 作 . 可 为前 端 检 测设 备配 备室 外 U P s及 电池组
的船舶进行诱导 . 降低事故发生 . 尽 量 保 证 航 道 的
畅通 。
针 对 应 急 事 件 中水 路 凸 显 的传 统 人 工 观 测 或 测 量手 段单 一 、 方 法耗 时 、 结 果不 准 确 等 问题 , 文 章
研 究 提 出“ 基于视频图像处理技术 、 激 光 技术 以 及
《 江苏 交通 科技 》2 0 1 7年 第 1期
内河船舶超 限检测 系统研 究
朱 鹏 飞
( 江 苏 长 天 智 远 交 通 科 技 有 限公 司 南 京 2 1 0 0 3 6 )
王 玮 吉 东
( 南 通 地 方 海 事 局 南通
摘 要
陈启 美
( 南京 大 学 南 京 2 1 0 0 1 1 )
及 船底 离河 床 的距离 . 得 到吃水 深度 . 并 根据误 差 修 正模型. 计算 最 准确 的值 2 研 究方法 、 结 果 船 舶超 限检 测系 统包 括超 长超宽 、超 高 和吃水 深 度检 测 3个模块 . 由于 3种检 测使用 的方法不 同 .
安 装 的位置 也 不 同 , 3种 检测 模块 是 相对 独 立 的 . 系 统 的总体 架 构 由 5部 分组成 : 船 舶超 高检测 、 船 舶超
宽度 进 行调 整 , 并 根 据船 闸 、 水 闸、 桥 梁 等 过河 设 施 高度设 置相 应 的检测 高 度 ( 3 ) 基 于超 声波 技术 的船舶 吃水 检测 通 过 单 波 束测 深 传感 器 阵列 测量 水 的深度 . 以
部 分 .地 方 经 济 的 发 展 直 接促 进 货 运 量 和 客 流 量
( 收稿 日期 、 编号 : 2 0 1 6 —1 0 — 2 0 / 8 6 8 5)
复杂 的 问题 将请 求人 为 干预 .以实 现水 路交 通 的智
能化 管理
・
3 5・
《 江苏 交通科 技》2 0 1 7年 第 1 期
港航 工 程
方 5 0 m 的位 置 .一套 安 装于 过 河设 施 安 全责 任 主 体单 位。 如 船 闸指挥 调度 室 同时。 可根 据需求 在现 场 安装 高音 喇叭 , 用 于提示 船舶 注意 航行安 全 、 警告 超 限船 舶立 即停 止航行
的增 加 , 人流、 物 流 的增 加 无 疑 带 动 地 区 之 间 贸 易
的频 繁 往 来 . 船 舶 密 度 增 加 及 船 舶 的尺 寸扩 大 . 这
与 内河 的现状航运 环境产 生 冲突 . 严 重 影 响 了航
段 的安 全 畅通 . 需 要 进 行 船 舶 超 限检 测 . 并 对 超 限
图 1 超 限 检 测 系 统 的 总体 架构
2 . 1 基 于激光技 术的船 舶超 高 模块 利 f f 】 激 光技 术 .提 H { 一 种 基于 激光技 术 的