C-3.2.5-O-F检验工具坐标系.
测量相关的坐标体系
测量相关的坐标体系地固坐标系又称大地坐标系/地球坐标系,是一种固定在地球上,随地球一起转动的非惯性坐标系。
根据其原点的位置不同,分为地心坐标系和参心坐标系。
地心坐标系的原点与地球质心重合.GPS卫星定位测量常用的WGS-84坐标系就是一种地心坐标系,坐标原点为地球质心,其地心空间直角坐标系的Z轴指向BIH (国际时间服务机构)1984.O定义的协议地球极(CTP)方向,X轴指向BIH 1984.0的零子午面和CTP赤道的交点,Y轴与Z轴、X轴垂直构成右手坐标系,称为1984年世界大地坐标系统。
参心坐标系的原点与某一地区或国家所采用的参考椭球中心重合,通常与地球质心不重合。
我国先后建立的1954年北京坐标系、1980西安坐标系都是参心坐标系。
但是随着GNSS技术的发展,很多国家都逐渐开使用地心坐标系.AutoCAD中采用的数学坐标系:世界坐标系(WCS)即参照坐标系。
其它所有的坐标系都是相对WCS定义的,WCS是永远不改变的。
用户坐标系统(UCS)即工作中的坐标系,使我们绘图使用最多的坐标系。
(Cass7.0绘图软件采用的坐标系为测量坐标系,正好和数学上的笛卡尔坐标系相反,X轴为南北方向,Y轴为东西方向。
这就是在CAD中查询出的坐标和在Cass中查询出的坐标纵横坐标刚好相反的原因。
)1 、地理坐标坐标。
在大地测量学中,对于地理坐标系统中的经纬度有三种提法:天文经纬度、大地经纬度和地心经纬度。
(1)天文坐标系天文坐标系是以铅垂线为基准、以大地水准面为基准面建立的坐标系,它以天文经纬度(λ,ψ)表示地面点在大地水准面上的位置,其中天文经度λ是观测点天顶子午面与格林尼治天顶子午面间的二面角,地球上定义为本初子午面与观测点之间的二面角;天文纬度ψ定义为铅垂线与赤道平面间的夹角。
(2)大地坐标系大地坐标系是以椭球面法线为基准线,以参考椭球面为基准面建立的坐标系,它以大地坐标(L,B,h)表示地面点在参考椭球面上的位置,其中大地经度L 为参考椭球面上某点的大地子午面与本初子午面间的二面角,大地纬度B为参考椭球面上某点的法线与赤道平面的夹角,北纬为正,南纬为负;为h为大地高,即从观测点沿椭球法线方向到椭球面的距离。
测量坐标系各象限的正负
测量坐标系各象限的正负在数学中,二维坐标系是一种常见且重要的工具,用于描述平面上的点和向量。
这个坐标系被分为四个象限,每个象限代表了不同的正负关系。
本文将介绍如何测量坐标系各象限的正负。
坐标系的建立首先,我们需要了解如何建立一个标准的二维坐标系。
在一个平面上,我们需要确定一个原点,通常用字母O表示。
然后,从原点O向右画一条水平线,称为x轴;从原点O向上画一条垂直线,称为y轴。
这两条轴线相交于原点O,形成了一个直角坐标系。
四个象限在二维坐标系中,根据x轴和y轴的正负关系,将平面划分为四个象限,分别记作第一象限、第二象限、第三象限和第四象限。
以下是各象限的正负关系:•第一象限:x坐标和y坐标都为正数。
例如,点(3, 5)位于第一象限。
•第二象限:x坐标为负数,y坐标为正数。
例如,点(-2, 4)位于第二象限。
•第三象限:x坐标和y坐标都为负数。
例如,点(-3, -6)位于第三象限。
•第四象限:x坐标为正数,y坐标为负数。
例如,点(4, -2)位于第四象限。
测量坐标系各象限的正负为了测量坐标系各象限的正负,我们可以按照以下步骤进行:1.给定一个点P的坐标,例如P(x, y)。
2.判断x轴和y轴的正负条件。
–如果x > 0,表示x轴为正方向。
–如果x < 0,表示x轴为负方向。
–如果y > 0,表示y轴为正方向。
–如果y < 0,表示y轴为负方向。
3.根据x轴和y轴的正负条件,确定点P所在的象限。
以点P(3, -4)为例,我们可以按照上述步骤来测量它所在的象限:1.点P的坐标为P(3, -4)。
2.x > 0,y < 0,所以x轴为正方向,y轴为负方向。
3.点P位于第四象限。
通过以上步骤,我们可以很方便地测量任意点在二维坐标系中所处的象限。
总结测量坐标系各象限的正负是理解二维坐标系的基础。
通过了解x轴和y轴的正负关系,我们可以确定任意点所处的象限。
这对于解决各种问题和计算机图形学等领域起着重要的作用。
测量常见的三种坐标系统

测量常见的三种坐标系统引言在测量和空间定位领域,坐标系统是一个重要的概念。
不同的坐标系统具有不同的表示方式和适用范围。
本文将介绍三种常见的坐标系统:笛卡尔坐标系统、极坐标系统和球坐标系统,并分析它们在测量和定位中的应用。
1. 笛卡尔坐标系统笛卡尔坐标系统是最常见和常用的坐标系统之一。
它以直角坐标系的形式表示空间中的点。
该系统使用三个数值(x,y,z)来描述一个点的位置,其中x表示点在x轴上的位置,y表示点在y轴上的位置,z表示点在z轴上的位置。
这三个轴相互垂直,并形成一个三维坐标系。
笛卡尔坐标系统可以被广泛应用于测量和定位领域。
例如,在建筑工程中,可以使用笛卡尔坐标系统来测量和定位建筑物的各个部分。
在制图和计算机图形学中,也常使用笛卡尔坐标系统来描述二维或三维物体的位置和形状。
2. 极坐标系统极坐标系统以极坐标的形式来表示空间中的点。
该系统使用两个数值(r,θ)来描述一个点的位置,其中r表示点到原点的距离,θ表示点与正x轴的夹角(以弧度表示)。
极坐标系统在某些特定场景下具有一定优势。
例如,在天文学领域中,极坐标系统常被用来表示天体的位置。
极坐标系统也在雷达测量和声纳定位等领域中得到广泛应用。
3. 球坐标系统球坐标系统是另一种常见的坐标系统。
它将一个点的位置表示为半径(r)、极角(θ)、方位角(φ)这三个值的组合。
球坐标系统在描述三维空间中的物体位置时具有特定的优势。
例如,在天体观测中,球坐标系统能够更好地描述天体的位置和运动。
此外,在地球测量中,球坐标系统也被广泛用于定位和距离测量。
应用比较在实际应用中,选择合适的坐标系统对于测量和定位的精度和效果至关重要。
以下是三种坐标系统的应用比较: - 笛卡尔坐标系统提供了直观和简便的描述空间中点位置的方式,适用于大多数情况下的测量和定位。
它能够准确描述物体在三维空间中的位置,但对于特定场景并不具备特殊优势。
- 极坐标系统在描述点之间的距离和角度关系时更为直观。
TOOL坐标系和校准方法

TOOL坐标系和校准方法工具坐标系点数据是由直角坐标系为基准的工具(Tool)坐标系中心位置及姿势所表示的。
位置用位置数据(X 、Y 、Z ),姿势用姿势数据(U 、V 、W )指定。
除了机器人固有的T ool 0 坐标系外,用户可自定义1~15 共15个Tool 坐标系。
机器人默认的Tool 0坐标系根据机器人类型分别如下定义。
水平多关节机器人水平多关节机器人((4轴机器人轴机器人))的Tool 0坐标系坐标系的定义的定义第4轴(旋转轴)的中心为原点,把第4轴旋转到0度角度时与机器人直角坐标系平行的坐标轴为坐标轴的坐标系为T ool 0坐标系。
(参考下图)。
Tool 0坐标系是固定在第四关节(旋转关节)的,所以第四关节时Tool 0坐标系也同时旋转。
垂直垂直多关节机器人多关节机器人多关节机器人((6轴机器人轴机器人))的T ool 0坐标系坐标系的定义的定义桌上型时,把所有关节移动到0度位置时第6关节的法兰面中心为原点,垂直上方向为X 轴,机器人直角坐标的X 轴方向为Y 轴,对第6关节法兰面垂直的方向为Z 轴的坐标系为T ool 0坐标系(请参考下图)。
Tool 0坐标系是固定在第6关节的,所以机器人姿势变化时Tool 0坐标系也相应的移动。
吊顶型和挂壁型时的T ool 0坐标系请参考下图。
用户自定义工具用户自定义工具((T ool )坐标系的应用1)视觉定位中的T ool 应用应用。
用视觉定位来补正工件的角度时如果安装在旋转轴(第4轴)上的吸嘴或夹具的中心(Tool 中心)与Tool 0坐标系不一致,通常需要根据角度偏移值和T ool 中心的偏移值经过复杂的三角函数计算才能准确的抓取工件。
这时事先把吸嘴中心或夹具中心校准为自定义T ool 坐标系,就无需任何计算可准确抓取工件。
2)快速搬运工件时多Tool 坐标系的应用用一个吸嘴或夹具搬运工件时有时因机器人速度限制无法达到短循环时间的要求,这时增加几个吸嘴或夹具同时抓取多个工件搬运可减短10%-20%的循环时间,根据情况有时甚至减短30%-40%的循环时间。
C-3.1.1-O-F三点法设置工具坐标系
谢谢
电气电子学院 黄老师
FANUC ROBOT
3. 设置方法: • 三点法 • 六点法 • 直接输入法
方法一:三点法设置
步骤如下:
1. 依次按键操作: MENU(菜单) -
- SETUP(设定)-- F1 TYPE(类型)
-- Frames(坐标系)进入坐标系
画面1
设置界面,见画面1;
2. 按 F3 OTHER(坐标)选择Tool
Frame(工具坐标)进入工具坐标
工业机器人(FANUC)现场编程
三点法设置工具坐标系
一. 工具坐标系
1. 工具坐标系需要在编程前进行设定,缺省设定的工具坐标系的原 点位于机器人J6 轴的法兰上。根据需要把工具坐标系的原点移到 工作的位置和方向上,该位置叫工具中心点TCP(Tool Center Point)。
2. 工具坐标系的所有测量都是相对于TCP的,用户最多可以设置10 个工具坐标系,它被存储于系统变量$MNUTOOLNUM。
4;
画面4
5. 记录三个接近点,用于计算TCP点的 位置,即TCP点相对于J6轴法兰盘中 心点的X,Y,Z的偏移量;
具体步骤如下: a) 移动光标到每个接近点 (Approach point N (参考点N)); b) 示教机器人到需要的点,按 SHIFT+F5 RECORD(位置记录) 记录; c) 记录完成,UNINIT(未示教)变为
系的设置界面,见画面2;
画面2
3. 在画面1中移动光标到所 需设置 的TCP点,按键 F2 DETAIL(细节) 入 进入详细界面;
4. 按F2 METHOD(方法),见画面3,
Excel提供了非常实用的数据分析工具
2.4.1 模拟运算表2.4.1.1 单变量模拟运算表2.4.1.2 双变量模拟运算表2.4.2 单变量求解2.4.3 规划求解2.4.3.1 求解优化问题2.4.3.2 求解方程组2.4.4 方案分析2.4.4.1 建立方案2.4.4.2 显示方案2.4.4.3 修改、删除或增加方案2.4.4.4 建立方案报告2.4.5 数据分析工具库.1 模拟运算表所谓模拟运算表实际上是工作表中的一个单元格区域,它可以显示一个计算公式中某些参数的值的变化对计算结果的影响。
由于它可以将所有不同的计算结果以列表方式同时显示出来,因而便于查看、比较和分析。
根据分析计算公式中的参数的个数,模拟运算表又分为单变量模拟运算表和双变量模拟运算表。
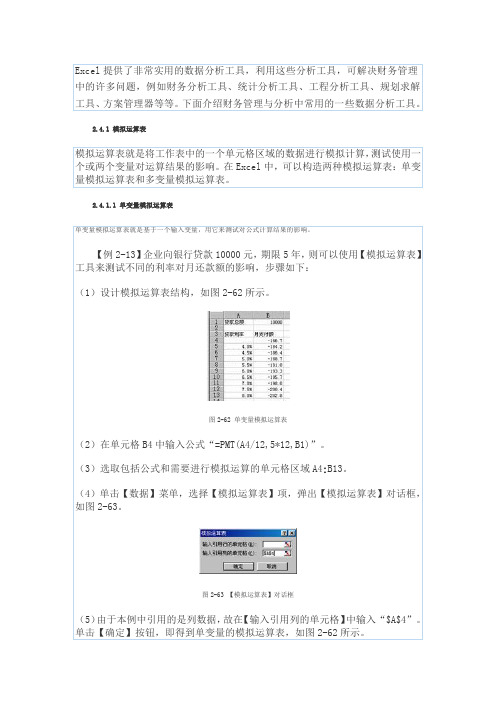
4.1.1 单变量模拟运算表单变量模拟运算主要用来分析当其它因素不变时,一个参数的变化对目标值的影响。
例如,要计算一笔贷款的分期偿还额,可以使用Excel 2000提供的财务函数之一PMT。
而如果要分析不同的利率对贷款的偿还额产生的影响,则可以使用单变量模拟运算表。
假设某公司要贷款1000万元,年限为10年,目前的年利率为5%,分月偿还。
则利用PMT函数可以计算出每月的偿还额。
其具体操作步骤如下:在工作表中输入有关参数,如图4-1所示。
在B5单元格输入计算月偿还额的公式:“=PMT(B3/12,B4*12,B2)”在上述公式中,PMT函数有三个参数。
第一个参数是利率,因为要计算的偿还额是按月计算的,所以要将年利率除以12,将其转换成月利率。
第二个参数是还款期数,同样的原因需要乘以12。
第三个参数为贷款额。
该函数的计算结果为“-106065.52”,即在年利率为5%,年限为10年的条件下,需每月偿还10 6065.52元请注意,这时单元格区域B8:B16中的公式为“{=表(,B3)}”,表示其是一个以B3为列变量的模拟运算表。
与一般的计算公式相似,当改变模拟数据时,模拟运算表的数据会自动重新计算。
工具坐标系标定算法
工具坐标系标定算法
工具坐标系标定算法是一种将工具坐标系与机器人坐标系进行对应的过程。
通过标定,可以确定工具坐标系与机器人坐标系的转换关系,从而实现工具在机器人上的精确控制。
常用的工具坐标系标定算法有以下几种:
1. 朴素标定法:该方法通过测量一系列不同位置和姿态下的标定点,利用最小二乘法求解工具坐标系与机器人坐标系之间的转换矩阵。
该方法简单易行,但对标定点的数量和位置要求较高。
2. 非线性标定法:该方法基于最小二乘法,使用非线性优化算法(如Levenberg-Marquardt算法)来优化标定结果。
非线性
标定法能够处理更复杂的标定情况,但计算复杂度较高。
3. 多视角标定法:该方法通过利用多个摄像头对工具进行同时拍摄,在不同视角下测量标定点的位置和姿态,从而得到更准确的标定结果。
多视角标定法对硬件设备和标定场景要求较高,但能够获得更准确的标定结果。
4. 三维扫描标定法:该方法使用3D扫描技术对工具进行扫描,得到工具的三维模型,然后通过匹配三维点云与机器人坐标系的特征点,计算工具坐标系与机器人坐标系之间的转换关系。
三维扫描标定法能够获得高精度的标定结果,但需要相应的扫描设备和处理算法支持。
这些标定算法都有各自的优缺点,选择合适的标定方法需要根据实际需求和条件进行综合考虑。
五轴联动加工中心的精度检测方法
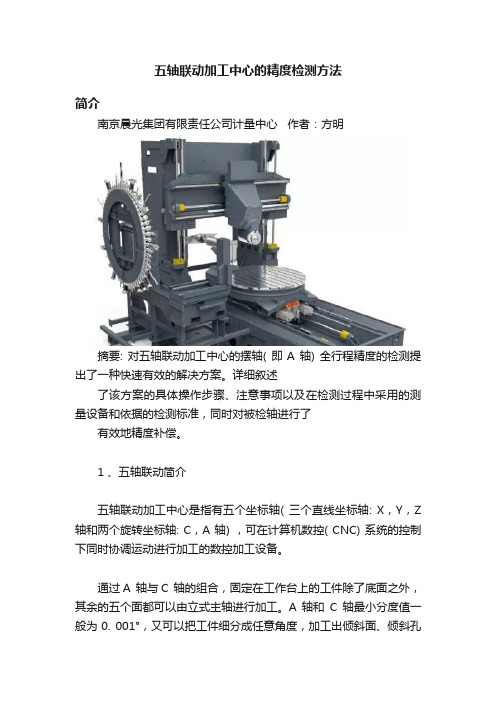
五轴联动加工中心的精度检测方法简介南京晨光集团有限责任公司计量中心作者:方明摘要: 对五轴联动加工中心的摆轴( 即A 轴) 全行程精度的检测提出了一种快速有效的解决方案。
详细叙述了该方案的具体操作步骤、注意事项以及在检测过程中采用的测量设备和依据的检测标准,同时对被检轴进行了有效地精度补偿。
1 、五轴联动简介五轴联动加工中心是指有五个坐标轴( 三个直线坐标轴: X,Y,Z 轴和两个旋转坐标轴: C,A 轴) ,可在计算机数控( CNC) 系统的控制下同时协调运动进行加工的数控加工设备。
通过A 轴与C 轴的组合,固定在工作台上的工件除了底面之外,其余的五个面都可以由立式主轴进行加工。
A 轴和C 轴最小分度值一般为0. 001°,又可以把工件细分成任意角度,加工出倾斜面、倾斜孔等。
A 轴和C 轴如与XYZ 三个直线轴实现联动,依靠先进的数控系统、伺服系统以及软件的支持可加工出复杂的空间曲面。
常见的立式五轴联动加工中心有两个回转轴,如图1 所示,一个是工作台回转轴,以X 轴方向为轴心线,± 90°来回摆动,定义为摆轴,也称A 轴; 一个就是设置工作台的中间的回转台,在图示的位置上环绕Z 轴方向360°回转,定义为C 轴。
图1 常见的立式五轴联动加工中心示意图加工中心XYZ 以及C 轴的精度检测,技术手段现在已经很成熟。
XYZ 三个直线轴一般是采用双频激光干涉仪作为标准进行检测,回转C 轴用双频激光干涉仪以及配套的回转分度器检测,或者用传统的正多面棱体配上自准直仪进行角分度检测,这里不再详述。
而对于A 轴,同样是角分度检测,也可用双频激光干涉仪回转分度器或者是正多面棱体和自准直仪作为标准进行检测。
但是如果是照搬全套C 轴的检测方法,将无法在全行程内完成测量,因为随着A 轴的转动,工作台将遮挡测量光路,无法继续检测,只能检测到部分角度,也就不能判断A 轴整个行程范围的精度。
酶联免疫试剂盒检测通则-最新国标

酶联免疫试剂盒检测通则1 范围本文件描述了酶联免疫试剂盒的检测一般要求和检测过程。
本文件适用于酶联免疫试剂盒的检测。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB 19489 实验室生物安全通用要求GB/T 4889 数据的统计处理和解释正态分布均值和方差的估计与检验GB/T 27404 实验室质量控制规范食品理化检测3 术语和定义本文件没有需要界定的术语和定义。
4 一般要求产品酶联免疫试剂盒应附产品说明书,或等同的指导性文件。
实验室实验室的生物安全管理应符合GB 19489中的相应要求。
检测人员检测人员应熟悉相关法律法规、检测方法原理,掌握质量检测操作规范、技术标准、质量管理和实验安全等专业知识和技能。
检测指标标准曲线相关系数、灵敏度、精密度、正确度和特异性。
5 检测过程检测样品的选择及制备5.1.1 阴性样品与待分析样品应来源于同一物种,并具有相似的结构特性,包括不含有或方法学未能检出目标分析物的样品,以及含有或添加其他与目标分析物结果类似物质(易产生交叉反应)的样品,按酶联免疫试剂盒说明书的步骤进行前处理。
5.1.2 阳性样品是指含有目标分析物的待测样品,按酶联免疫试剂盒说明书的步骤进行前处理。
5.1.3 阴性样品和阳性样品应具有基质符合性,以及与实际样品所含除目标分析物外其他成分的相似性,重点考虑典型样品基质或相似基质,综合考虑蛋白、脂肪、水分、糖分、高聚物或多聚体物质、色泽、酸碱性等影响检测的组分进行区分选择。
5.1.4 对于多种目标分析物的检测,尽可能对全部目标分析物进行检测,若因客观条件限制不能检测全部目标分析物,宜对所有目标分析物进行分类(如结构类似程度、危害程度等),每一类至少选择一种目标分析物进行检测。
5.1.5 阳性样品或阴性样品宜采用国家有证标准物质、参考物质或者质量控制品等,选择适宜的实验室标准分析方法或经典方法对样品中的目标分析物进行仪器测定,确认所有阴性样品不能检出目标分析物,确认所有阳性样品中目标分析物的浓度。
C-5.1.2 -O-F 零度点核对方式.

谢谢
电气电子学院 黄老师
FANUC ROBOT
步骤2 点动机器人,使每根轴到0度位置(刻度标记对齐 的位置),见图5-3画面的姿态;参看图5-4,使机械刻度 标记对齐。
刻择2 【ZERO POSITION MASTER】(零度点核对方 式),按【ENTER】 (回车)键确认,
选择ZERO POSITION MASTER 画面
工业机器人(FANUC)现场编程
零度点核对方式
步骤1:进入Master/Cal(零度点调整) 界面:
• 依次按键操作: 【MENU】(菜单) - 0 【NEXT】(下个) - 【System】(系 统设定) - F1 【Type】(类型) - 【Master/Cal】(零度点调整);
系统Master/Cal菜单画面
步骤 4 按F4 【YES】(是) 确认进入一下画面
记录每个轴的脉冲数
步骤5 选6 【CALIBRATE】(校准),按 【ENTER】 (回车 )键确认; 步骤6 按 F4 【YES】(是)确认,显示图5-6
表示当前每一 个轴的旋转角 度为零度
步骤7 按 F5 【 DONE 】(完成) 隐藏Master/Cal (零度 点调整)界面,即可
三坐标测量技术
假设该点测量误差e=0.03mm
全长=L
测量区域
0.12mm
0.03mm
1/4L L
按比例计算,末端误差e=0.12mm
建议多几个测量点
2、测量边缘时应避免碰杆
要了解3-2-1,还要知道~ 1、建立的是直角坐标系(右手法则) 2、可与关节臂的球坐标/圆柱坐标互换
3、工件加工精度越低,测量的误差越大(比例放大)
6、转轴位置超差,可能问题就出在这里(交由担当与供应商作进一步确认)
综合分析案例:GB1杂物箱动作不良、碰锁
基准:动作顺畅无阻碍 实绩:在关闭杂物箱时出现与锁 干涉现象。 不良率/发生件数:60~70%
3、数据分析说明
(通过型面偏差估算凸台高度)
X距离 Y距离 Z距离 1.000 -0.883 -0.000 -0.470
4、要考虑测量设备的探测误差(三坐标、关节臂)
5、应验证用于坐标建立的元素(平面度,直线度,圆 度,两轴垂直度)
3-2-1很麻烦啊,那什么时候会用到? 1、基本采用于机加工工件的测量(三具的测量) 2、用于有明确坐标轴特征及原点特征的测量方案 总结一句: 3-2-1是一种原始的,受限制较多的坐标建立方式
2、测量检具上的 基准块,以3-2-1 方法建立测量坐标
3、如果经校验检具基准超差了怎么办?(1、维修;2、最佳拟合)
SAMPLE2
1、CD机按钮粘滞(图纸上没有明确的定位基准),应该怎样进行测量?
3、这种情况应该以什么为测量基准呢?
2、测量按钮的边缘 (这是必要的)
4、CD及与面板 的装配孔(与对 手件的装配位置)
2、在关闭杂物 箱时出现与锁 干涉现象。
4、通过型面偏差 估算凸台高度
X距离 Y距离 Z距离
测量坐标系有哪三种
测量坐标系有哪三种背景简介在测量领域,坐标系是一种非常重要的概念,用于描述和测量物体位置和方向。
使用坐标系可以方便地捕捉和记录物体的几何形态和位置信息。
在实际应用中,有不同的方式来定义和表示坐标系,本文将介绍三种常见的测量坐标系。
1. 直角坐标系(笛卡尔坐标系)直角坐标系,也称为笛卡尔坐标系,是最为常见的一种坐标系表示方法。
它使用两个相互垂直的坐标轴(通常称为X轴和Y轴),以及一个原点来定义平面上的点的位置。
通过在X轴上测量水平距离和在Y轴上测量垂直距离,可以以数值的方式准确描述任意点的位置。
在直角坐标系中,点的位置由其X轴和Y轴上的坐标值表示。
例如,一个点的坐标为(3, 4),意味着它在X轴上的坐标为3,在Y轴上的坐标为4。
通过计算两个点之间的距离和角度,可以进行物体的测量和分析。
直角坐标系在地图绘制、三维建模、物体定位等领域得到广泛应用。
它的优点是简单直观,易于理解和计算。
2. 极坐标系极坐标系是一种使用距离(称为极径)和角度来描述点位置的坐标系。
与直角坐标系不同,极坐标系使用一个原点和一根固定的极轴来表示点的位置。
点的位置由距离极轴的距离和与极轴的夹角表示。
在极坐标系中,距离起点最近的点通常称为极点,该点的坐标为(0, 0)。
距离极轴特定距离的点在极坐标系中有固定的极径值,该值表示该点与极点之间的距离。
而点与极轴之间的夹角则用正角度表示。
极坐标系在天文学、雷达测距、音频处理等领域中得到广泛应用。
它能够更直观地表示环形和旋转的物体特征,但在计算和测量直线距离时可能不够方便。
3. 三维坐标系三维坐标系是在直角坐标系基础上扩展而来的一种坐标系,用于描述三维空间中的点的位置。
与直角坐标系类似,三维坐标系使用三个相互垂直的坐标轴(通常称为X轴、Y轴和Z轴),以及一个原点来定义点的位置。
在三维坐标系中,点的位置由其X轴、Y轴和Z轴上的坐标值表示。
例如,一个点的坐标为(3, 4, 2),意味着它在X轴上的坐标为3,在Y轴上的坐标为4,在Z 轴上的坐标为2。
5位数坐标系 -回复
5位数坐标系-回复什么是5位数坐标系。
5位数坐标系是一种用来表示和定位物体在三维空间中位置的坐标系统。
它由三个数值组成,用逗号隔开,分别代表物体在X轴、Y轴和Z轴上的位置。
这种坐标系被广泛应用于计算机图形学、工程设计、运动控制等领域。
在5位数坐标系中,每个轴上的位置可以用一个整数来表示。
例如,一个具体的5位数坐标可以是(10, 5, 3)。
其中,10代表物体在X轴上的位置,5代表物体在Y轴上的位置,3代表物体在Z轴上的位置。
这个坐标可以用来定位一个具体的物体。
在5位数坐标系中,原点(0, 0, 0)位于X轴、Y轴和Z轴的交叉点处。
X 轴是水平方向,正方向向右;Y轴是垂直方向,正方向向上;Z轴是垂直于XY平面的轴,正方向朝外。
通过改变这三个轴上的数值,可以改变物体的位置。
使用5位数坐标系定位物体的方法是通过改变X、Y和Z轴上的数值来达到目标位置。
例如,如果要将物体移动到坐标(5, 8, 2)的位置,可以将物体在X轴上的位置改为5,Y轴上的位置改为8,Z轴上的位置改为2。
除了位置,5位数坐标系还可以表示物体的方向和角度。
例如,可以使用额外的三个数值来表示物体的旋转角度。
这些数值通常是以欧拉角或四元数形式表示的。
通过改变这些数值,可以改变物体的方向。
在计算机图形学中,使用5位数坐标系绘制三维图形是非常常见的。
通过改变物体的位置和方向,可以创建逼真的三维场景。
例如,在计算机游戏中,可以使用5位数坐标系来控制游戏角色的运动和行为。
此外,5位数坐标系还用于工程设计和运动控制。
在工程设计中,可以使用5位数坐标系来定位和调整物体位置,以确保设计的准确性。
在运动控制中,可以使用5位数坐标系来控制机器人或其他运动设备的运动路径。
总之,5位数坐标系是一种在三维空间中表达和定位物体位置的数学工具。
它通过X、Y和Z轴上的数值表示物体的位置,可以用于计算机图形学、工程设计和运动控制等应用中。
通过改变这些轴上的数值,可以改变物体的位置、方向和角度,实现目标位置和行为的控制。
5位数坐标系 -回复
5位数坐标系-回复[5位数坐标系]是一个用于表示位置和方向的数学工具。
在这个坐标系中,位置由三个坐标值(x、y和z)来确定,而方向由两个角度(θ和φ)来确定。
这种坐标系在物理学、工程学和计算机图形学等领域中被广泛使用,因为它能够准确地描述一个点的位置和方向。
首先,让我们来了解一下坐标系的基本原理。
在[5位数坐标系]中,x轴表示左右方向,y轴表示上下方向,而z轴表示前后方向。
这三个轴相互垂直,并且通过原点O相交。
这个原点通常表示为(0,0,0)。
在[5位数坐标系]中,每个点都可以用一个三维向量来表示。
这个向量由三个坐标值组成,分别代表点在x、y和z轴上的位置。
例如,点A的坐标为(xA,yA,zA)。
这意味着点A在x轴上的位置为xA,在y轴上的位置为yA,在z轴上的位置为zA。
除了表示位置,[5位数坐标系]还可以表示方向。
方向由两个角度值确定,分别为θ和φ。
其中,θ表示与x轴的夹角,范围可以为0到360度;而φ表示与z轴的夹角,范围可以为-90到90度。
通过这两个角度值,我们可以准确地描述一个点的朝向。
在[5位数坐标系]中,我们可以使用一系列操作来改变一个点的位置和方向。
例如,平移操作可以将一个点沿着一个方向移动一定的距离。
缩放操作可以将一个点相对于原点进行放大或缩小。
旋转操作可以将一个点绕着原点或其他指定点进行旋转。
在计算机图形学和仿真领域中,[5位数坐标系]经常用于描述物体的位置和方向。
通过在这个坐标系中进行一系列变换操作,我们可以实现非常复杂的图形效果。
例如,我们可以创建逼真的3D模型,模拟光照效果,甚至是进行虚拟现实和增强现实的应用。
总而言之,[5位数坐标系]是一个非常重要的数学工具,用于描述位置和方向。
它在物理学、工程学和计算机图形学等领域中被广泛使用,因为它能够准确地描述一个点的位置和方向。
对于那些对空间位置和方向感兴趣的人来说,了解[5位数坐标系]的基本原理和应用是非常有益的。