000弹塑性力学-应力理论
弹塑性力学与有限元-弹塑性应力-应变关系
f ( ij ) 0
df
f
ij
d ij
0
d n 0
f ( ij ) 0
df
f
ij
d ij
0
d n 0
卸载
f ( ij ) 0
df
f
ij
d ij
0
d n 0
《弹塑性力学与有限元》
弹塑性应力-应变关系
加载总则和流动法则
(a) 理想塑性材料
加载和卸载准则
(b) 强化材料
《弹塑性力学与有限元》
《弹塑性力学与有限元》
弹塑性应力-应变关系
加载总则和流动法则
g f1 1 2 2k 0 (AB面)
C
g f2 1 3 2k 0 (BC面)
f2 0
B
对AB面
d1p
d1
f1
1
d1
f1 0 A
d
p 2
d1
f1
2
d1
d1p : d2p : d3p d1 : 1 : 0
d3p
因为有
f
ij
J 2
ij
J 2 sij
sij
2
J2 k 0 y
故理想塑性材料与Mises条件相关 连的流动法则为:
dipj sijd
0
1
x
3
《弹塑性力学与有限元》
弹塑性应力-应变关系
加载总则和流动法则
上式表明应变增量张量与应力偏张量成比例,也可以写成 ➢ Mises屈服条件的流动法则:
d p d p d p d p d p d p
《弹塑性力学与有限元》
弹塑性力学与有限元 —弹塑性应力-应变关系
弹塑性应力-应变关系
弹塑性力学弹性与塑性应力应变关系详解课件

有限差分法
有限差分法(Finite Difference Method,简称FDM)是一种基于差分原 理的数值模拟方法。
它通过将连续的时间和空间离散化为有限个差分节点,并利用差分近似代 替微分方程中的导数项,从而将微分方程转化为差分方程进行求解。
有限差分法适用于求解偏微分方程,尤其在求解波动问题和热传导问题方 面具
幂函数型弹塑性本构模型
该模型将应力应变关系表示为幂函数形式,适用于描述岩石等材料 的弹塑性行为。
双曲线型弹塑性本构模型
该模型将应力应变关系表示为双曲线形式,适用于描述某些复合材 料的弹塑性行为。
弹塑性本构模型的选用原则
根据材料的性质选择合适的弹塑性本 构模型,以确保能够准确描述材料的 力学行为。
在选择本构模型时,需要考虑模型的 复杂性和计算效率,以便在实际工程 中得到广泛应用。
弹塑性力学弹性与塑性应 力应变关系详解课件
目录
• 弹塑性力学基础 • 弹性应力应变关系 • 塑性应力应变关系 • 弹塑性本构模型 • 弹塑性力学的数值模拟方法
01
弹塑性力学基础
弹塑性力学定义
01
02
03
弹塑性力学
是一门研究材料在弹性与 塑性范围内应力应变关系 的学科。
弹性
材料在受到外力作用后能 够恢复到原始状态的性质 。
当外力卸载后,物体发生弹性恢复,但需要一定的时间才能完成。这种 现象称为弹性后效。弹性后效的大小与材料的性质、温度和加载速率等 因素有关。
03
塑性应力应变关系
塑性应力应变关系定义
塑性应力应变关系
01
描述材料在塑性变形阶段应力与应变之间的关系。
特点
02
当材料受到超过屈服点的外力时,会发生塑性变形,此时应力
弹塑性力学第二章教学内容
z y
z
技
大
学
力
学
教 研
应力张量:一点的应力状态是一个对称的二阶张量,
室 各应力分量即为应力张量的元素。
ij yxx
xy y
xz yz
,
i, j x,y,z
zx zy z
西 南 科 技
大 二维应力状态与平面问题的平衡方程
学
力 学 教 研 室
二维应力状态与平面问题的平衡方程
一、平面问题
物体所受的面力和体力以及应力都与某一个坐标
Ps在坐标轴x, y, z方向的投影Px, Py, Pz称为P点面力的分量,
指向坐标轴正方向的分量为正,反之为负。
力和应力的概念
2. 内力
西物
南 科
体 在外力作用下
技
大
学
变形
(改变 了质点 间距)
在物体内形成
力
学
当内力场足以和外
教
力平衡时,变形不
研
再继续
室
平衡
附加 的内 力场
二、应力的定义
西 南
科 技 大
化简后可得:xx
yx
y
Fbx
dxdy0
学 力
x
x
yx
y
Fbx
0
学 教 研
同理可求出:
y
y
xy
x
Fby
0
室
二维应力状态的平衡方程
x
x
yx y
Fbx
0
y
y
xy x
Fby
0
x
x
yx y
Fbx
0
西 南
y
y
xy x
弹塑性力学 第02章应力状态理论

§2-1 §2-2 §2-3 §2-4 §2-5 §2-6 §2-7
应力状态理论
体力和面力 应力和一点的应力状态 与坐标轴倾斜的微分面上的应力 平衡微分方程·应力边界条件 主应力·应力张量不变量 最大切应力 偏应力张量及其不变量
§2-1 体力和面力
作用于物体上的外力分为两类 ①体力:指分布在物体内所有质点上的力,如重 力、惯性力和电磁力等;用 Fbx , Fby , Fbz 表示单位 体积的体力;其量纲为 MT −2 L−2 ;其单位为 N m 3。 ②面力:指作用在物体表面上的力,如风力、液 体压力等;用 f sx , f sy , f sz 表示单位面积的面力;其 量纲为 MT L ;其单位为 N m 。
⎧σ x = −γy ⎨ ⎩τ xy = 0
平面情况下面力边界 条件简化为
⎧ ⎪ f sx = σ x l + τ yx m ⎨ ⎪ ⎩ f sy = τ xy l + σ y m
AB边
l = 0, m = −1
f sx = 0, f sy = γh
⎧ ⎪σ y = −γh ⎨ = 0 τ ⎪ xy ⎩
⎧τ zy = τ yz ⎪ ⎨τ xz = τ zx ⎪τ = τ yx ⎩ xy
切应力互 等定理
σ ij = σ ji
在弹性体的表面,考虑任一微分四面体的平衡。 设物体单位面积上的面力为 f sx , f sy , f sz ,物体表面外 法线的方向余弦为l,m,n,则应用平衡关系,可得
⎧ f sx = σ x l + τ yx m + τ zx n ⎪ ⎪ ⎨ f sy = τ xy l + σ y m + τ zy n ⎪ ⎪ ⎩ f sz = τ xz l + τ yz m + σ z n
弹塑性力学-第二章 应力分析
x’3
e
' 3
e3
e1
e
' 1
e2' e2
x’2 x2
x1
x’1
e i' Q i'je j Q i'1 e 1 Q i'2e 2 Q i'3 e 3
2019/9/26
30
§2-3 应力分量转换公式
e i' Q i'je j Q i'1 e 1 Q i'2e 2 Q i'3 e 3
32
§2-3 应力分量转换公式
九个元素用矩阵表示
Qi'j Q
则新坐标基矢量用旧基矢量表示:
e '
Qe
ei' Qi' jej
2019/9/26
33
§2-3 应力分量转换公式
同理旧坐标基矢量用新坐标基矢量表示
ei
Qij' e'j
Q ij' e ie 'j coxi,sx'j()
x xe xx yeyx ze z
2019/9/26
16
§2-2 应力矢量和应力张量
ti ijej
沿三个坐标面的应力矢量由九个 元素(分量)表示,
这九个分量组成一个二阶张量:
11 12 1 3 xx xy x z x xy x z 21 22 23 yx yy y zyx y y z
31 32 33 zx zy zz zx zy z
这九个分量的两个下标:第一个表示应力 矢量作用面的法线方向,第二个下标表示应力 矢量的分量的方向。
弹塑性力学——应力
x xy xz yx y yz z zx zy
• 张量表示 用1、2、3取代下标x、y、z,
11 12 13 ij 21 22 23 31 32 33
• 应力正、负号规定 正面上的应力若指向坐标轴正方向为正,否则为负; 负面的应力若指向坐标轴负方向为正,否则为负。
y
应力分量的坐标变换
• 新旧坐标的夹角 ex
e ' x
ey
m1 m2
ez
n1 n2
l1 l2
ey '
ez'
l3
m3
n3
• e ' 面(斜截面)的应力矢量在旧坐标下的分量 x
Tx=xl1+yxm1+zxn1 Ty=xyl1+ym1+zyn1 Tz=xzl1+yzm1+zn1
• 力矩平衡:绕z轴
(xydydz)dx(yxdxdz)dy=0 xy=yx 绕x和y方向的形心轴取矩 yz=zy xz= zx
静力学边界条件
n X A
xl+yxm+zxn= X
xyl+ym+zyn= Y =
xzl+yzm+zn
Z
z y x
例1-2 如图所示的楔形体受水压力作用,水的容重为,试写出边界条 件。
zx zx dz dxdy zx dxdy Xdxdydz 0 z
x yx zx X 0 x y z
• 由y、z方向的平衡
xy x y y zy z Y 0
xz yz z Z 0 x y z
弹塑性力学应力分析
解之 将 联立
代入
解之
将 联立
代入
解之
将 联立
代入
解之
二. 最大和最小应力
3 z
3
设一点的主应力及其主方向已知,现以 三主方向取Oxyz坐标,如图所示 设任一斜截面N,其方向余弦为l1、l2、l3 2
则由斜截面正应力公式 及
1x
N
12
N
O
y2
1
主应力单元体
3
求极值
解之 同理,将
xxyy ( x 12))22 x2x2yy
xxyy ( y 12))22 x2x2yy
ll33((21) 0
设 为第一主方向与x轴的夹角
则由三角函数关系可得
例2-2 已知弹性体内部某点的 应力状态为
a 0 a
ij
0
a
0
a 0
a 0 a
求主应力和主方向。
解:不变量的计算
代入特征方程
C zx pz
yx
xy
xz
x
zy yz
N
pN y
设斜截面上全应力为:
O y
yz
x
zy
xz xy zx
yzp y
B
y
沿坐标的分量为:
px
A
z
x
简写为:
设四面体斜面的面积为:
则三个直面的面积为:
简写为:
考虑四面体微元的平衡
X 0 Y 0
pxdSN xdSx yxdSy zxdSz 0 pydSN xydSx ydSy zydSz 0
将 向外法线和斜面分解为 和 。
则
即
将Cauchy定理代入:
展开整理得:
弹塑性力学讲义应力

第1章 应 力1. 1 应力矢量物体受外力作用后,其内部将产生内力,即物体本身不同部分之间相互作用的力。
为了描述内力场,Chauchy 引进了应力的重要概念。
对于处于平衡状态的物体,假想使用一个过P 点的平面C 将其截开成A 和B 两部分。
如将B 部分移去,则B 对A 的作用应以分布的内力代替。
考察平面C 上包括P 点在内的微小面积,如图1.1所示。
设微面外法线(平面C 的外法线)为n ,微面面积为∆S ,作用在微面上的内力合力为∆F ,则该微面上的平均内力集度为∆F /∆S ,于是,P 点的内力集度可使用应力矢量T (n ),定义为T (n ) =SFs ∆∆∆0lim→B∆SACPn ∆Fxyz图1.1 应力矢量定义在笛卡儿坐标系下,使用e x ,e y 和e z 表示坐标轴的单位基矢量,应力矢量可以表示为T (n ) = T x e x +T y e y +T z e z(1.1)式中T x 、T y 和T z 是应力矢量沿坐标轴的分量。
上篇弹性力学第1章应力8除进行公式推导外,通常很少使用应力矢量的坐标分量T x、T y 和T z。
实际应用中,往往需要知道应力矢量沿微面法线方向和切线方向的分量,沿法线方向的应力分量称为正应力,沿切线方向的应力分量称为剪应力。
显而易见,应力矢量的大小和方向不仅取决于P点的空间位置,而且还与所取截面的法线方向n有关,即作用在同一点不同法线方向微面上的应力矢量不同。
所有这些应力矢量构成该点的应力状态。
由应力矢量的定义并结合作用力与反作用力定律,在同一点,外法线为-n微面上的应力矢量为:T(-n)= -T(n) (1.2)1.2 应力张量人们讨论问题常常是在笛卡儿坐标中进行,因此,我们使用六个与坐标面平行的平面从图1.1中P点的邻域截取一个微六面体,如图1.2所示。
在这个微六面体中,若微面的外法线方向与坐标正方向一致,则称为正面;若与坐标正方向相反,则称为负面。
000弹塑性力学-应变理论
另一种则是物体的任意两点之间 的相对距离发生了改变,从而使其 形状和尺寸发生了变化,即物体产 生了变形,产生这种情形的位移, 就称之为变形位移.
显然,要研究物体在外力作用下
的变形规律,只需要研究物体内
各点的相对位置变动情况也即 砂土
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
(3-4)
我们从剪应变本身的含义及其推导
过程可知: xy yx , yz zy , zx xz
并且在下节可证明:
xy
1
2
xy
1 2
v x
u y
yz
1
2
yz
1
2
w y
v z
zx
1
2
zx
xy
(e)
由图3 3可见 :
v dx
v
tan
x dx u
dx
x 1 u
x
x
(f)
在式( f )的分母中, u 与1相比是一个 x
微量,故可略去,因而得 :
= v
砂土
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂土 粘 ( 半 土 透 水 )
毛细张力力 总应力
中和应力 有效应力
还可找到沿其他方向的线应变、角
应变和转角.
归纳起来,在空间情况下,受力物 体内的一点沿三个坐标轴x、y、z
方向上的线应变x、 y、z ,以及过
工程弹塑性力学-第一章 应力理论
角应变
①、涉及受力物体内某一点; 涉及受力物体内某一点; ②、涉及过该点的某两相垂直方向; 涉及过该点的某两相垂直方向; ③、是一个有单位,无量纲的物量。 是一个有单位,无量纲的物量。
应变的符号规则: ◆ 应变的符号规则:
表征某点某方向伸长变形的线应变 取正,反之取负; 取正,反之取负; 表征某点两坐标轴正方向所夹直角 减少的角应变取正,反之取负。 减少的角应变取正,反之取负。
2. 应力 (1) 应力的概念
内力 (1) 物体内部分子或原子间的相互 不考虑) 不考虑 作用力; (不考虑 作用力 (2) 由于外力作用引起的相互作用力 由于外力作用引起的相互作用力.
点的内力面分布集度 ∆ (1) P点的内力面分布集度 F ----P点的应力 点的应力 p =lim A (2) 应力矢量 −∆F的极限方向 ∆→ ∆ A 0 应力矢量. 由外力引起的在 P点的某一面上内力分布集度 点的某一面上内力分布集度
屈服条件
建立屈服条件的必然性: 建立屈服条件的必然性: 逐一由试验建立失效判据的不可能性; ★ 逐一由试验建立失效判据的不可能性; 对于相同的破坏形式建立破坏 破坏原因假说 ★ 对于相同的破坏形式建立破坏原因假说 的可能性; 的可能性; 利用简单(如单向拉伸或压缩) ★ 利用简单(如单向拉伸或压缩)试验的结 果建立复杂应力状态下的破坏判据; 果建立复杂应力状态下的破坏判据; 破坏判据
体能恢复其变形的性能 体能恢复其变形的性能 称为弹性, 称为弹性,恢复了的变 称为弹性变形。 弹性变形 形称为弹性变形。 能称为塑性, 3.塑性:当撤除外力时固体能残留下来变形的性能称为塑性, 塑性:当撤除外力时固体能残留下来变形的性能称为塑性 残留下来的变形称为塑性变形。 残留下来的变形称为塑性变形。 称为塑性变形
弹塑性力学-1 应力分析
斜截面上的应力 分量计算公式
如果作用在物体表面上的外面载荷用Fx,Fy,Fz表 示,而斜面为边界面,此时上式中的Pvx,Pvy,Pvz都 换成Fx,Fy,Fz,则上式亦可作为应力边界条件。
2 2 2 pvy pvz 总应力 pv pvx
正应力 v lPvx mP vy nP vz l 2 x m2 y n2 z 2lm xy 2mn yz 2nl zx 剪应力 v pv2 v2
对于动力学问题,还要给出初始条件。
弹塑性力学的基本解法: 根据基本方程求解 精确解法 即能满足弹塑性力学中全部方程的解。 近似解法 即根据问题的性质,采用合理的简化假 设,从而获得近似结果。 有限元数值分析方法 它不受物体或构件几何形状的限制,对于各种复 杂的物理关系都能算出正确的结果。
1-2 三维应力状态分析
z
pvz
斜截面的法线v与坐标轴 正向夹角余弦:
xy y yx xz yz zy zx pvx x z
x
pvy
cos(v, x) l , cos(v, y ) m, cos(v, z ) n
y
四面体平行于坐标轴的棱 边长度为dx,dy,dz 斜截面的面积为dS 静力平衡方程
3 基本方程与基本解法
弹塑性力学基本方程的建立需要从几何学、运动学 和物理学三方面来进行研究。 几何学方面 建立位移和应变之间的关系。 几何方程,位移边界条件 运动学方面 建立物体的平衡条件。 运动(或平衡)微分方程,载荷的边界条件
以上两类方程与材料的力学性质无关,属于普适方程。
物理学方面 建立应力与应变之间的关系。 本构方程
正应力 p cos cos2 剪应力 p sin sin cos
弹塑性力学第三章 应力与应变讲解

式中:n和s分别为微分面的法线和切线方向的单位 矢量。全应力和应力分量之间有
n pn n
n pn s
pn2
2 n
(3.3)
研究具体问题时,总是在一个可以选定坐标系里进 行。对给定的直角坐标系,全应力还可以沿坐标系 方向进行分解。
p 的单位法向量,它与三个坐标轴之间的夹角余弦为 l1、l2、l3
则该主平面上的应力矢量 n 可表示为
pn n (3.14)
或
px py
l1 l2
(3.15)
pz
l3
式中: 表示主应力
将应力分量表达式(3.7)代入上式,经移项并整理后得
(
x
)l1
设给定的坐标系Oxyz下,某点M的应力张量为
ij yxx
xy y
xz yz
zx zy z
现让该坐标系原点不动,坐标轴任意旋转一个角度而得 到新坐标系Ox’y’z’,新旧坐标关系如下表:
x
y
z
X’ l11 cos(x ', x) l12 cos(x ', y) l13 cos(x ', z)
要使主方向存在,也即要使方程组(3.17)或(3 .18)有 非零解,则其系数行列式必须为零。
x yx zx
xy y
zy
xz yz 0 z
(3.19a)
方程组(3.19)也可以写成
det ij ij 0
(3.19b)
式(3.19)展开后,得
对面)上有9个应力分量。这9个应力分量的整
弹塑性力学_第7章 应力分析

上述方程可以改写成如下形式
I1 I 2 I3 0
3 2
三个应力不变量
I1 x y z
2 2 I 2 y z z x x y 2 xy yz zx 2 2 2 I 3 x y z x yz y zx z xy 2 yz zx xy
解得
l 2 2 m 2 2 n 2 2
于是
1 =
2 - 3
σ3
2 3 - 1 2= 2 1 - 2 3 = 2
σ1
σ2
§7-5 等倾面上的正应力
等倾面的概念 等倾面的方向 l2+m2+n2=1 等倾面上的正应力
1 3 l mn 3 3
1 v ( 1 2 3 ) 3
等倾面上的剪应力
v2 pv2 v2 1 2 1 2 2 ( 1 2 3 ) ( 1 2 3 ) 2 3 9 1 [2( 12 22 32 ) 2( 1 2 2 3 3 1 )] 9 1 [( 1 2 ) 2 ( 2 3 ) 2 ( 3 1 ) 2 ] 9
由于上式l2、m2、n2恒为正,右边分子分母同号。 设σ 1> σ 2 > σ 3,第二式分母为负,分子必为负
2 ( v 1 )( v 3 ) v 0
也就是
τ
( v
1 3
2
) (
2 2 v
1 3
2
)2
σ3 σ2 σ1
同理
( v
τ
令
李同林 弹塑性力学 第2章 应力理论 应变理论

§2—4 最大(最小)剪应力、空间应力圆、 应力椭球
1、最大(最小)剪应力
由2-25及
2 2 2 l1 l 2 l3 1 求出:
2 2 xy xy (cos2 sin 2 ) ( y x ) sin cos
x y
x y
cos 2 xy sin 2
x y
2
sin 2 xy cos 2
xz 0
2 2 n Px2 Py2 Pz2 n
2 2 ( 1l1 ) 2 ( 2l2 ) 2 ( 3l3 ) 2 ( 1l12 2l2 3l3 )
( )l ( )l ( 1 3 )l ( 2 3 )l 3
(2—28)
2 3 2 2
12
1 2
2
2.空间应力圆 · 应力椭球
一点应力状态 用解析法研究 用几何法研究 (1)空间应力圆
若三个坐标轴的方向都恰取为应力主方向,则由 式(2—24)或(2—15)可求出用,外法线为n的斜截面 2 2 n、 n、 1、 2和 3表示的l12、l2 和l3 , 上的正应力 其表达式为:
3 2 n I1 n I 2 n I 3 0
(2—13)
(2—18)
理论上可证明:当一点的应力状态确定时,由式2-18 必可求出三个实根,即为主应力,且 1 2 3 。 主应力彼此正交。
I1 x y z ii 1 2 2 2 I 2 x y y z z x xy yz zx ( ii jj ij ji ) 2 x xy xz
弹塑性力学 第02章应力状态理论
b
z
b
z
σy
a
τ yz τ zy
τ yx τ xy σ x τ xz
o
pz
c
τ zx
y
a
o
px
py
c
y
x
σz
x
于是可得 同理可得
p x = σ x l + τ xy m + τ xz n
p y = τ yx l + σ y m + τ yz n pz = τ zx l + τ zy m + σ z n
f sj = σ ij ni
上列三个方程给出了应力和面力之间的关系,称 为应力边界条件 或面力边界条件。
⎛ ∂ ui ⎞ ⎟ = σ ij , j + Fbi = 0⎜ ρ 2 ⎟ ⎜ ∂t ⎠ ⎝
2
描述弹性体 内部的平衡
f sj = σ ij ni
描述弹性体表面的平衡
显然,如已知应力分量满足平衡微分方程和应 力边界条件,则物体是平衡的;反之,如物体是平 衡的,则应力分量必须满足平衡微分方程和应力边 界条件。 需要指出的是,这里所指的平衡,仅仅是静力 学上可能的平衡,未必是物体实际存在的平衡。实 际的平衡,还要考虑物体变形的连续性条件。
平 衡 微 分 方 程
平衡微分方程,又称纳维方程
⎛ ∂σ x ∂τ yx ∂τ zx ∂ 2u ⎞ + + + Fbx = 0⎜ =ρ 2 ⎟ ⎜ ⎟ ∂x ∂y ∂z ∂ t ⎝ ⎠ ∂τ xy ∂σ y ∂τ zy ⎛ ∂ 2v ⎞ + + + Fby = 0⎜ =ρ 2⎟ ⎜ ⎟ ∂x ∂y ∂z ∂ t ⎝ ⎠ ⎛ ∂τ xz ∂τ yz ∂σ z ∂2w ⎞ + + + Fbz = 0⎜ =ρ 2 ⎟ ⎜ ⎟ ∂x ∂y ∂z ∂ t ⎝ ⎠
弹塑性力学基本理论及应用_刘土光___华中科技大学研究生院教材基金资助_第二章应力状态
ij yx y
0
0 0 z
实际上 z 并不是独立变量,它可通过 x 和 y 求得,因此不管是平面应变问题 还是平面应力问题,独立的应力分量仅有 3 个,即 x 、 y 和 xy (= yx ),对于平面 应变问题的求解,可不考虑 z 。
三. 平衡微分方程
物体在外力作用下处于平衡状态时,由各点应力分量与体力分量之间的关系所
因此各点的应力分量是坐标 z,y,z 的函数。所以,应力张量 ij 与给定点的空间
位置有关,同时应力张量是针对物体中的某一确定点而言的,今后将会看到,应 力张量完全确定了一点处的应力状态。
张量符号与下标记号法使冗长的弹塑性力学公式变得简明醒目,在文献中已 被广泛应用,今后将逐渐熟悉这种标记法。
2.2 二维应力状态与平面问题的平衡微分方程式
20
第二章 应力状态
x
cd
x
x ab x
dx x
ab
y
dy 0(dx2 , dy 2 )
ab
由于 ab,cd 线元上的应力分量均可用相应线元中点处的应力分量表示,以及略去
二阶以上的微量后,由上式得 cd 边上的正应力为
x
x x
dx
同理,如 ab 边上的切应力为 xy ,ad 边上的正应力和切应力分别为 y , yx 可 得 cd 边上的切应力及 bc 边的应力分量可类推分别得
17
第二章 应力状态
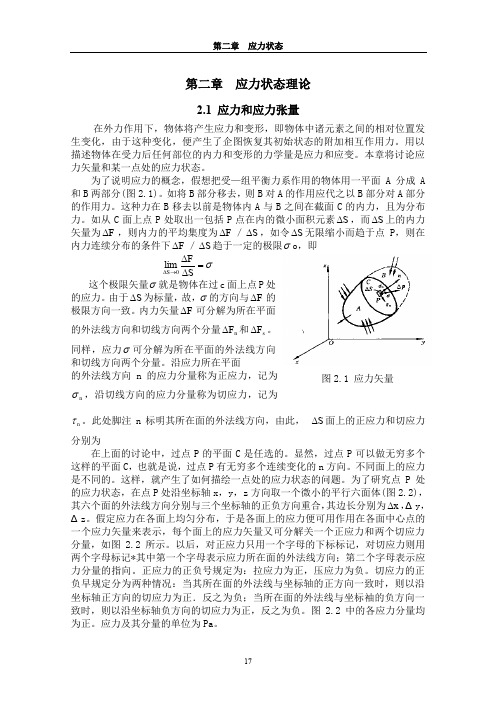
图 2.2 应力表示法
由图 2.2 可知,当微小的平行六面体趋于无穷小时,六面体上的应力就代表一 点处的应力。因此,一点处的应力分量共有 9 个,其中有 3 个正应力分量、6 个切 应力分量,由切应力互等定理可知,实际上独立的切应力分量只有 3 个。把这 9 个应力分量按一定规则排列,令其中每一行为过一点的一个面上的 3 个应力分量, 即得如下应力张量,在数学上称之为二阶张量。
2-弹塑性力学-应力分析

S = lim 应力S 应力 是内力的集度 A→ 0 内力和应力均为矢量 应力的单位: 应力的单位:1Pa=1N/m2 =1.0197kgf/mm2 1MPa=106 N/m2 应力是某点A的坐标的函数 的坐标的函数, 应力是某点 的坐标的函数,即受力体内不同 点的应力不同. 点的应力不同. 应力是某点A在坐标系中的方向余弦的函数 在坐标系中的方向余弦的函数, 应力是某点 在坐标系中的方向余弦的函数, 即同一点不同方位的截面上的应力是不同的. 即同一点不同方位的截面上的应力是不同的. P A
第二章 应力分析 (Stress Analysis)
应力的坐标变换(例题讲解) 应力的坐标变换(例题讲解)*
实际应用:晶体取向, 实际应用:晶体取向,织构分析等
应力莫尔圆**: 应力莫尔圆 :
二维应力莫尔圆与三维应力莫尔圆 掌握如何画,如何分析(工程力学已学,看书) 掌握如何画,如何分析(工程力学已学,看书)
第二章 应力分析 (Stress Analysis)
第二章 应力分析 (Stress Analysis)
应力的分量表示及正负符号的规定
便于计算机应用) σij → σxx , σxz …… (便于计算机应用) i——应力作用面的外法线方向 与应力作用面的外 应力作用面的外法线方向(与应力作用面的外 应力作用面的外法线方向 法线方向平行的坐标轴) 法线方向平行的坐标轴 j——应力分量本身作用的方向 应力分量本身作用的方向 时为正应力σ 当 i=j 时为正应力σ i,j同号为正(拉应力),异号为负(压应力) 同号为正( ),异号为负 , 同号为正 拉应力),异号为负(压应力) 时为剪应力τ 当 i≠j 时为剪应力τ i,j同号为正,异号为负 , 同号为正 同号为正,
弹塑性力学讲义 第四章应力应变关系

A 中有体积分和面积分,利用柯西公式和散度定理将面积分换成
体积分。
S Fiui dS S ( ijui )n j dS V ( jiui ), j dV
上式代入外力功增量
A ( fi ji, j )ui dV jiui, j dV ijijdV WdVU
弹性主轴
x3 为弹性主轴或材料主轴, 并取另一坐标系 x’i
, 且 x’1
= x1, x’2=x2, x’3=-x3。
4
在两个坐标下,弹性关系保持不变,则[C]中元素减少为 13 个独立系数。
Qi’j
x’1 = x1 x’2=x2 x’3=-x3
代入
x1
1 0 0 1
x2
0 0 0 -1
x3
0
i ' j ' Qi ' k Q j 'l kl
2
i ' j ' Qi ' k Q j 'l kl
得
x ' x1 , x ' x 2
1
3 1
,
x ' x3
3
,
x ' x ' x1 x 2
1 2
x ' x ' x3 x1 , x ' x ' x3 x 2
3 2
应变分量具有相同关系式。
[C]
为对称矩阵
[C]= [C]T。
最后 Eijkl 的独立系数为 21 个——材料为各向异性线弹性材料。 *对各向异性材料的本构关系可见,剪应变引起正应力,正应变也产生 剪应力。 弹性材料性质一般都具有某些对称性,利用对称可简化 [C] 中系数。 2.2 具有一个弹性对称面的材料 若物体内各点都有这样一个平面, 对此平面对称方向其弹性性质相同,则 称此平面为弹性对称面,垂直弹性对称面 的方向称为弹性主轴。 如取弹性对称面为 x1 —x2 面, x1 x3’ x2 x3
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
zl323
2 xyl31l32
2 yzl32l33
2 zxl33l31
(2-4)
x'y' xl11l21 yl12l22 zl13l23 xy (l11l22 l12l21) yz (l12l23 l13l22 ) zx (l13l21 l11l23 ) y'z' xl21l31 yl22l32 zl23l33 xy (l21l32 l22l31) yz (l22l33 l23l32 ) zx (l23l31 l21l33) z'x' xl31l11 yl32l12 zl33l13 xy (l31l12 l32l11) yz (l32l13 l33l12 ) zx (l33l11 l31l13 )
砂土 粘 ( 半 土 透 水 )
毛细张力力 总应力
中和应力 有效应力
px
τ xz
τ O yz τ zy
τ zx
σz
n x'
σx
py
A
x
z'
B
y
假定不计体力,且斜截面上的外法线n 的余弦分别为:
cos(n, x) l1
cos(n, y) l2
(a)
cos(n, z) l3
若令斜截面ABC的面积为1,则三角形 OBC、OAC、OAB的面积分别为:
第一章 概述
1. 弹塑性力学的任务 2. 基本假设 3. 发展概况 4. 主要内容 5. 主要参考文献
第二章 应力理论
§2-1 应力的概念
若一物体受到外力 P1、P2…….Pn 的作用,它必然产生变形,也即其形 状或尺寸会发生变化,同时物体内各 部分之间将产生相互平衡的内力(附 加内力)。现假想用一个平面K将物 体分成两部分,如图2-1所示。显然 这两部分将通过K截面有分布内力的 相互作用。
x'
l2
x 11
l2
y 12
l2
z 13
2 xyl11l12
2 yzl12l13
2 zxl13l11
y'
Байду номын сангаас
l2
x 21
y
l222
l2
z 23
2 xyl21l22
2 yzl22l23
2 zxl23l21
z'
l2
x 31
l2
弹塑性理论
蒋建平
2007年9月
主要内容
第一章、 概述 第二章、 应力理论 第三章、 应变理论 第四章、 应力-应变关系 第五章、 弹塑性力学的基本解法 第六章、平面问题解答 第七章、 弹性空间问题 第八章、 弹性力学的变分解法 第九章、 简单的弹塑性问题及塑性极限分析定理 第十章、 岩土塑性力学基础
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂 ( 不 土 饱 和 )
总应力 中和应力 有效应力
砂土 粘 ( 半 土 透 水 )
毛细张力力 总应力
中和应力 有效应力
到一组方程,即变形协调方程。
(5)利用应力和应变之间的关系, 建立物性方程。
这样,就有足够的关系式求解 应力和位移。由于以单元体为研究 对象,方程具有微分性质,解弹塑 性问题归结为一系列的偏微分方程 组。
n pxl1 pyl2 pzl3
n
1
(
p2
2 n
)2
砂土
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂 ( 不 土 饱 和 )
总应力 中和应力 有效应力
砂土 粘 ( 半 土 透 水 )
毛细张力力 总应力
中和应力 有效应力
1
(
px2
p
2 y
称张量。
x xy xz
ij yx
y
yz
(2-1)
zx zy z
x'
x'y'
x'z'
i' j'
y'x'
y'
y'z'
z'x' z' y' z'
(2-2)
式(2-1)、(2-2)中有
式(2-3)如按下标记号法可缩记为:
pi ijl j (i、j x, y, z)
式中 l j 为斜截面 ABC 的外法线n 与 j 轴 间夹角的方向余弦 cos(n, j) ,则有
lx l1 ly l2 lz l3
根据式(2-3)的关系可分别求得该微斜 截面 ABC 上的正应力和剪应力:
由于该六面体各棱边长分别取为无 限小量dx、dy、dz,因此,该六面体 (即单元体)就反映和代表了P点。只 要dx、dy、dz尺寸取得足够小,就可以 近似地认为单元体个截面上的应力是均 匀分布的,且相互平行的两截面上的应 力相同,于是各面上的应力便可以用作 用在各截面中的一个应力矢量来表示。
而每个面上的应力矢量又可参照x、 y、z轴方向分解为一个正应力分量和两 个剪应力分量,如图2-2所示。例如,P 点单元体的与y 轴垂直的右端平面上有
因此,我们可毫不夸张地说,当已知一点的
六个独立的应力分量( ij)时,该点的应
力状态就完全确定了。
§2-3 应力分量转换方程
z
C
图 2-3
y'
pz
yx
σ τ y
τ xy
砂土
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂 ( 不 土 饱 和 )
总应力 中和应力 有效应力
应力状态,可用一组九个应力分量来表示, 在给定受力情况下,各应力分量的大小与坐 标轴方位的选择有关,但它们作为一组应力 分量这样一个整体,用来表示一点的应力状 态这一物理量,则与坐标的选择无关。
数学上,在坐标变换时,服从一定坐标
变换式的九个数所定义的量叫二阶张量。根
据这一定义,物体内一点处的应力状态可用
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂 ( 不 土 饱 和 )
总应力 中和应力 有效应力
砂土 粘 ( 半 土 透 水 )
毛细张力力 总应力
中和应力 有效应力
lim Fn A0 A
dFn dA
n
lim
A0
Ft A
dFt dA
n
在上述的讨论中,过C点的K截面 是任选的。显然过C点我们还可截取 无穷多个不同方位的这样的K平面。 过受力物体内同一点处不同截面上的
这个极限矢量p就是物体在K截面 上C点处的应力。它反映了物体在K 截面上分布内力在C点的集中程度。
应力p通常称为受力物体某截面 上某点处的全应力(也称合应力)。 应力的产生同物体的变形密切相关, 为了将应力同物体的变形和材料的强 度直接相联系,我们总是将全应力p 在该点该截面上分解为一个与截面外 法线相平行的法向分量和一个与截面 相切的切向分量。
,(根据剪应力互等定理: 砂土
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂 ( 不 土 饱 和 )
总应力 中和应力 有效应力
砂土 粘 ( 半 土 透 水 )
毛细张力力 总应力
中和应力 有效应力
xy yx , yz = zy , zx = xz )
平衡条件
Fx
0,
砂土
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂 ( 不 土 饱 和 )
总应力 中和应力 有效应力
砂土 粘 ( 半 土 透 水 )
毛细张力力 总应力
中和应力 有效应力
Fy
0,Fz
0
和
剪应力互等定理,得斜截面 ABC 上的正
应力和剪应力 。
i、j x, y, z和i'、j' x', y', z'
显 的同然一,应应力力张状量态,所ij 和以,i'
j' 表征的是同一点 ij 和 i' j' 之间必然
存在有一种客观内在的联系。一旦这一关系
确定了,我们就可以利用这一关系由已知的
一组应力分量 ij 去求另一组应力分量 i' j' 。
它可以包括各种实体结构(如 挡土墙、堤等)、非圆截面杆的扭 转、孔边应力集中,以及板壳等材 料力学初等理论所不能解决的力学 问题。
弹塑性力学就是从上述的各种 复杂的受力固体内一点处的单元体 (无限小微分体)的应力状态和应 变状态入手,通过分析建立起普遍 适用的基本方程和理论,并考虑和 满足具体问题的边界条件,从而求 得反映固体的应力和应变分布规律 的更精确的解答。
图 2-1
P3
P1
n 外法线
P2
σ
P7
p
K
砂土
地下水位
总应力 中和应力 有效应力
不 粘 透 土 水
砂土 低 粘 透 土 水
砂 ( 不 土 饱 和 )
总应力 中和应力 有效应力