基于Bayes理论的信息分布式融合模型与仿真
基于F-Bayes方法的尾矿库多传感器数据融合
露 技术在线
刘 刘 勤 王 彬 基 卜 as法 尾 库 传 器 据 合 永 志 耀 : 于 B。 的 矿 多 感 数 融 y方
l1 2
如用严 统计量来确定最佳分类阈值,需要得到卜统计 量的等价矩阵,因此还需将矩阵 行一系列变换。项 目中 选用算术平均值最小法建立相似矩阵,但相似矩阵一般只
de at o h s e uc d o 0. 0 . vi i n a r d e t 0 0 2
K y w r s d t — u i n:F s a i t c:B y s e t m t o e o d aa f so - tt si a e s i a i n;c u t r a a y i . r d o c i e a l n — a lse n l ss a i a t v t i i g d m
M l _ e s r a a F s o n R dia tie T ig D m b s d o - a e o h d / i o g L u Z i i , u t.s n o D t u in o a o c v ai n a a e n F B y s M t o / L u Y n , i h q n I
10 2
永 文 勤 王 彬 基 Fa 。法 尾 库 传 器 据 合 J I 志 耀 : 于’y方 的 矿 多 感 数 融 B。
翻技术 线 :
基于 B y s a e 方法 的尾矿库 多传感器数据融合水
刘 永 刘 志勤 王耀彬 西南科技大学计算机科学与技术学院 四川绵 阳 6 1 1 200
2 3 参 数 估 计 .
根据 动态 聚类 结果 ,分 别计算 各 值 所对应 的F 一 统计量值及F ,以得到 最佳估计值 ( )。通过比 值 表2
基于稀疏贝叶斯学习的稳健STAP算法

两种失配同时存在的情况还需进一步探索。
∑ 针对上 述 问 题,本 文 提 出 一 种 基 于 稀 疏 贝 叶 斯 框
架[1920]的 稳 健 STAP (robustsparseBayesianlearning basedSTAP,RSBLSTAP)算法。RSBLSTAP 算 法 首 先 利用导向矢量的 Kronecker结构构建阵列幅相误差和格点 失配同时存在情况下的误差信号模型,然后利用贝叶斯推 断和最大期望(expectationmaximization,EM)算法 迭 [2125] 代求取角度 多普勒像、阵列误差参数以及格点失配参数, 最后利用求解参数计算精确的 CCM 和STAP权矢量。此 外,为了减小模型构建所增加的计算复杂度,本文还提出了 一种基于空域通道的自适应降维字典矩阵设计方法。仿真 实验证明了所提算法的正确性与有效性。
示 划
分必然会带来格点失配效应。为了解决这个问题,本文借鉴
文献[15]中的策略,给每一个离散化的空域通道犳狊,犻(犻=1, 2,…,犖狊)增加一个辅助原子。定义
式 疏
中角:度α狓犮=多=[普α犻1犖=勒,狊11,犼α像犖=犱21,,α2非犻,,犼…犜零狏,α元(犳犖狊犱素犖,犱犼表,]犳T狊示∈,犻)犆相+犖狊应狀犖犱格×=1点犜表犞^上示α犮存待+在求狀杂取
(5) 的稀 波分
量 空
时;犞^字典[狏矩(犳阵犱,1。,犳但狊,1是),杂狏(波犳犱在,2,空犳狊时,2)平,面…是,狏连(犳续犱,犖存犱 ,在犳犱的,犖狊,)离]表散
SRSTAP算法的CCM 估计精度。
其引入式(1),则实际接收信号模型 可 [1718] 以修正为
∑ 为了减小模型失配造成的影响,文献[12 16]对离散
化处理造成的格点失配现象进行了分析,提出局域化搜索 和非均匀划分的空时字典校准算法;文献[17 18]对由阵 元幅相误差造成的失配现象进行了分析,提出误差参数和
信息融合技术

1.3信息融合技术1.3.1信息融合的基本原理信息融合这一概念是20世纪70年代提出的,在其后的较长一段时期,人们普遍使用“数据融合”这一名词。
近年来,随着科学技术的迅猛发展,军事、民用工业领域中不断增长的复杂度使得出现了数据泛滥、信息超载,而现有大型设备结构小型化、功能复杂化使得传感器安装的数量和类型受到限制,需要新的技术途径对过多的信息进行消化、解释和评估,“信息融合”一词被广泛采用[23]。
对信息融合概念的描述多种多样。
美国军方成立的数据融合工作组联合指导实验室(JDL)将信息融合概括为:一个处理探测、互联、相关、估计以及组合多元信息和数据的多层次、多方面过程,目的是获得准确的状态估计和识别,完整而及时地对战场态势和威胁评估。
欧洲遥感实验室协会(EARSel)以及法国电器和电子协会(FSEE)建立的工作组的定义为:一个由方法和工具表示的框架,用于进行不同来源的数据的联合,目的是获得更高质量的信息[18]。
“高质量”的精确含义依赖于应用。
这样,存在各种不同种类、不同等级的融合,如数据融合、图像融合、特征融合、决策融合、传感器融合、分类器融合等。
对不同来源、不同模式、不同媒质、不同表现形式的信息进行综合,最后可以得到对被感知对象更加精确的描述。
国外对信息融合技术的研究起步较早。
20世纪70年代初,美国研究机构就在国防部的资助下,开展了声纳信息理解系统的研究。
从那以后,信息融合技术便迅速发展起来,不仅在各种C3I系统(Computing Communication Control and Information)中尽可能采用多个传感器来收集信息,而且在工业控制、机器人、空中交通管制、海洋监视、综合导航和管理等领域也在朝着多传感器的方向发展。
1988年,美国国防部把信息融合技术列为90年代重点研究开发的二十项关键技术之一,且列为最优先发展的A类[10,11]。
信息融合由简单的多传感器融合起步,经历了同一系统内部不同信息的融合,少数简单系统之间的单一信号融合,发展到现在多个不同复杂系统之间的不同类型信号之间的融合。
第三章分布式检测与数据融合
R = CF p − CD p + C
f F f D
其中: CF = P ( 0 C10 − C00) CD = P ( ) 1 C01 − C11 C = C01 P 1 + C00 P 0
最优分布式检测系统的优化目标: 寻找一个系统判决规则r = {r0 , r1 , , rN } 使得融合系统的Bayes风险R (r )最小
传感器观测相互独立 传感器观测相关
各传感器观测相互独立 传感器最优融合规则为:似然比融合规则 各传感器观测相关 传感器最优融合规则无法简化为似然比融合规则 为降低传感器观测相关条件下数据融合规则研究的复 杂性,一般地假设各传感器的观测独立,其原因为: (1)当传感器观测之间的间距较大时,独立性假设近 似成立 (2)弱相关
1. 问题的提出(≥3传感器) 研究内容:分布式串行检测融合系统的性能优化 优化准则:融合系统的Bayes风险最小 分析 (1)各传感器观测相关时,可推出多传感器最优判决 准则的必要条件,但无法简化为似然比判决准则,难 以求解 (2)各传感器观测独立时,多传感器最优判决准则为 似然比判决 求系统最优判决准则:联合求解各传感器的最优似然 比判决门限
第一节、局部判决融合规则的设计
关键:如何优化组合来自各局部节点的判决 硬判决(以二元假设为例) 有假设H0和H1,其先验概率分别为P0和P1,设 有N个局部检测器,每个局部检测器都作出一 局部判决ui (i=1,2,…,N)
0 检测器i判决H 0 存在 ui = 否则 1
融合中心组合各个传感器的局部判决,产 生如下的全局判决
3
256
20
4
65536
168
选择融合规则的准则:最可能出现的假设
信息融合算法
信息融合算法1 概述信息融合又称数据融合,是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。
经过融合后的传感器信息具有以下特征:信息冗余性、信息互补性、信息实时性、信息获取的低成本性。
1、组合:由多个传感器组合成平行或互补方式来获得多组数据输出的一种处理方法,是一种最基本的方式,涉及的问题有输出方式的协调、综合以及传感器的选择。
在硬件这一级上应用。
2、综合:信息优化处理中的一种获得明确信息的有效方法。
例:在虚拟现实技术中,使用两个分开设置的摄像机同时拍摄到一个物体的不同侧面的两幅图像,综合这两幅图像可以复原出一个准确的有立体感的物体的图像。
3、融合:当将传感器数据组之间进行相关或将传感器数据与系统内部的知识模型进行相关,而产生信息的一个新的表达式。
4、相关:通过处理传感器信息获得某些结果,不仅需要单项信息处理,而且需要通过相关来进行处理,获悉传感器数据组之间的关系,从而得到正确信息,剔除无用和错误的信息。
相关处理的目的:对识别、预测、学习和记忆等过程的信息进行综合和优化。
2 技术发展现状信息融合技术的方法,概括起来分为下面几种:1)组合:由多个传感器组合成平行或互补方式来获得多组数据输出的一种处理方法,是一种最基本的方式,涉及的问题有输出方式的协调、综合以及传感器的选择。
在硬件这一级上应用。
2)综合:信息优化处理中的一种获得明确信息的有效方法。
例:在虚拟现实技术中,使用两个分开设置的摄像机同时拍摄到一个物体的不同侧面的两幅图像,综合这两幅图像可以复原出一个准确的有立体感的物体的图像。
3)融合:当将传感器数据组之间进行相关或将传感器数据与系统内部的知识模型进行相关,而产生信息的一个新的表达式。
4)相关:通过处理传感器信息获得某些结果,不仅需要单项信息处理,而且需要通过相关来进行处理,获悉传感器数据组之间的关系,从而得到正确信息,剔除无用和错误的信息。
相关处理的目的:对识别、预测、学习和记忆等过程的信息进行综合和优化。
北航多源信息融合总复习课
21
.
2.3 分布式融合检测系统
应用贝叶斯法则:
P(H i/u)P(u/P H (iu )P )(H i),(i0,1)
故:
P(H1/u)P(u/H1)P(H1) P(H0/u) P(u/H0)P(H0)
从而最大后验概率融合检测准则也可写为:
P P((uu//H H1 0))P P((H H1 0))?H1:H0
表决融合检验准则
在具有n个传感器的检测网络中,设定一个阈值k, 当存在k个以上的传感器支持某一假设时,则判定 该假设成立。融合准则如下:
u 0
1, 0,
N
i1 N
i1
u u
i i
k k
其中,1k n 法;
当
19
.
k 1
。当 k n 时,为“与”方 时,为“或”方法。
2.3 分布式融合检测系统
.
P ( D1 / H 0 ) p0 ( y )dy R1
P ( D1 / H 1 ) p1 ( y )dy R1
P(D0/H0)1P(D1/H0) P(D0/H1)1P(D1/H1)
2.3 分布式融合检测系统
代入可得平均代价函数如下:
C P 0 C 0 0 P 1 C 0 1 [ P 0 ( C 1 0 C 0 0 ) p 0 ( y ) P 1 ( C 0 1 C 1 1 ) p 1 ( y ) ] d y R 1
分布式检测结构是目前多传感器检测的主要结构模型
12
.
2.3 分布式融合检测系统
现现象象
Y1
Y1
S1
S1
Y2
Y3
Y2
……
现象
YN
S2
S3
面向复杂系统工程的多学科统一建模与联合仿真技术研究与应用实践
面向复杂系统工程的多学科统一建模与联合仿真技术研究与应用实践作者:暂无来源:《智能制造》 2017年第5期航空工业信息技术中心(金航数码)郄永军多学科联合仿真技术应用工程背景航空产品是涉及机械、电子、电气、控制、液压及软件等多学科, 可靠性、维修性和保障性等多专业工程要求的复杂系统,其开发模式正经历从基于文档向基于模型的范式转移。
建立以基于模型的系统工程方法论为指导、以功能/性能样机为载体,贯穿需求、功能、逻辑与物理构建模型在环、软件在环、硬件在环及人员在环的数字化综合仿真环境,开展多学科统一建模与联合仿真,实现功能/ 性能需求在开发早期阶段的验证与确认,基于数学模型(虚拟样机)开展复杂系统架构与方案的设计、权衡与分析优化,缩短设计迭代周期,提升开发质量,已成为国际航空航天和防务领域复杂系统开发的主流趋势。
当前,基于Modelica 语言的系统仿真技术已在达索航空、德宇航和空客得以工程应用,通过构建由功能样机、性能样机和几何样机组成的数字样机,可实现在虚拟空间下开展虚拟试验/ 试飞,极大的降低物理试验/ 试飞的周期与成本。
多学科联合仿真技术演进历程系统级多学科联合仿真主要应用于系统架构与方案权衡、功能分配、接口定义、子系统参数优化、功能/ 性能早期验证和确认等领域,涉及多学科的系统仿真技术主要经历了如下发展历程。
(1)基于接口的多学科建模与仿真技术:该方法是由各学科相应的商用仿真软件提供或开发相应的接口。
其完全依赖商用软件之间的一对一接口,这些接口往往为某些商业公司所私有,不具有标准性和开放性。
(2)基于高层体系结构(HLA):该方法克服了基于接口的诸多缺陷,较好地实现了多学科建模与仿真,但要求建模人员必须先熟悉HLA/RTI 的各种服务协议,再编制相应的程序代码,并且需要人为的割裂不同学科子系统之间的耦合关系,实质上是一种子系统层次上的集成方法。
(3)基于统一建模语言的多学科系统仿真技术:该方法具有与学科无关的通用模型描述能力,任何学科均可实现统一建模。
面向多物理场耦合的分布式模型协同仿真技术研究
面向多物理场耦合的分布式模型协同仿真技术研究随着科技的发展,各种物理场耦合问题的研究日益增多,因此需要一种高效的技术来解决这些问题。
在这种情况下,分布式模型协同仿真技术就应运而生。
分布式模型协同仿真技术是指将多个仿真模型进行集成,从而达到对多物理场耦合问题进行分析的目的。
该技术旨在模拟不同的运动、物质流动、电磁场和热传导等多种方面的物理现象。
在使用分布式模型协同仿真技术时,需要使用高性能计算机和相应的软件来支持其中的运算。
这种技术的一个显著特点是,可以在全球范围内进行分布式计算,提高计算速度和精度。
此外,分布式模型协同仿真技术还具有其他许多优点。
它可以帮助研究人员更准确地预测物理场的行为,而且能够节省时间和成本。
使用分布式模型协同仿真技术,可以更好地了解多个物理场之间的相互作用,而且还可以提高研究人员对系统造成的影响的了解程度。
虽然分布式模型协同仿真技术的应用还比较有限,但它在一些领域的应用非常广泛。
例如,在机器人领域,这种技术可以帮助研究人员更好地了解机器人在各种环境中的行为,并优化它们的设计。
在材料科学领域,这种技术可以帮助研究人员更好地理解材料的结构和性能,从而提高材料的性能。
在生物医学领域,分布式模型协同仿真技术可以用于研究人员更好地理解生物体内的各种生理现象,并帮助找到更好的治疗方法。
总之,分布式模型协同仿真技术是一种非常有用的技术,可以在许多领域得到应用。
通过使用这种技术,研究人员可以更好地了解不同物理场之间的相互作用,并预测物理场的行为。
尽管该技术在某些领域已得到了广泛的应用,但在其他许多领域仍需要更多的研究。
相信随着技术的不断发展,这种技术的应用范围将会进一步扩大。
机器学习中的模型融合与集成技术(Ⅰ)

机器学习中的模型融合与集成技术随着科技的发展和数据的爆炸式增长,机器学习技术在各行各业都得到了广泛的应用。
而在机器学习领域中,模型融合与集成技术是一种非常重要的方法,它能够提高模型的预测准确性和稳定性,使得机器学习模型更具有泛化能力。
本文将从模型融合和集成技术的定义、原理、应用和发展趋势等方面进行探讨。
一、模型融合与集成技术的定义模型融合与集成技术是指将多个单一模型的预测结果结合在一起,以获得更加准确和稳定的预测结果的一种方法。
在机器学习领域中,模型融合与集成技术通常包括Bagging、Boosting、Stacking等方法。
其中,Bagging是一种将多个模型的预测结果进行平均或投票的方法,通过减小模型的方差来提高预测的准确性;Boosting是一种通过串行训练多个模型,并根据前一个模型的误差调整下一个模型的权重,以提高模型的预测准确性的方法;而Stacking是一种将多个模型的预测结果作为训练数据,再训练一个元模型来获得最终的预测结果的方法。
二、模型融合与集成技术的原理模型融合与集成技术的原理在于利用多个模型之间的差异性,通过结合多个模型的预测结果来降低误差,提高预测的准确性。
在Bagging中,由于每个模型是独立训练的,因此模型之间具有一定的差异性,通过对多个模型的预测结果进行平均或投票,可以减小模型的方差,从而提高预测的准确性;在Boosting中,由于每个模型都是基于前一个模型的误差来进行训练的,因此能够不断减小模型的偏差,从而提高预测的准确性;而在Stacking中,则是通过将多个模型的预测结果作为训练数据,再训练一个元模型来获得最终的预测结果,从而能够结合多个模型的优势,进一步提高预测的准确性。
三、模型融合与集成技术的应用模型融合与集成技术在机器学习领域有着广泛的应用。
在实际的数据竞赛和业务中,模型融合与集成技术往往能够取得更好的效果。
例如,在Kaggle等数据竞赛中,获得冠军的队伍往往都会使用模型融合与集成技术来提高模型的预测准确性;在金融、医疗、电商等行业中,模型融合与集成技术也被广泛应用于风控、推荐系统、精准营销等场景中,取得了良好的效果。
第3讲贝叶斯数据融合

❖ 假设由n个传感器对一未知目标参数进行测量,
每一传感器根据测量结果利用一定算法给出一
个关于目标的身份说明。设A1,A2,…,An为n
个互斥的穷举目标,Bi为第j个传感器给出的目
标身份说明,且Ai满足:n PAi 1 i 1
则:
PAi
B
P Ai B PB
PB Ai PAi
n
PB
Ai
P
Ai
i 1
器的输出Xi,i=1,2,…,m。一般认为它们 服从正态分布,用xi表示第i个测量值的一次 测量输出,它是随机变量Xi的一次取样。
❖ 设:
~
N
0
,
2 0
Xk
~
N
,
2 k
基于Bayes估计的传感器检测数据融合
基本理论和方法—置信距离和置信距离矩阵
❖ 为对传感器输出数据进行选择,必须对其可 靠性进行估计,为此定义各数据间的置信距 离。
❖ 根据具体问题选择合适的临界值ij 由dij 对数 据的可靠性进行判定。
1 rij 0
dij ij dij ij
❖ 由此得到一个二值矩阵,称为关系矩阵。
r11 r12 r1m
Rm
r21
r22
r2
m
rm1
rm2
rmm
基于Bayes估计的传感器检测数据融合
基本理论和方法—基于Bayes估计的数据融合算法
基于Bayes估计的数据融合一般步骤
④
将
0
、
2 0
和最佳融合数对应的
xk
、
2 k
代
入Bayes融合估计公式求的参数估计值。
ˆ
l xk
2
k 1 k
基于贝叶斯网络的信息融合方法研究

基于贝叶斯网络的信息融合方法研究第一章:引言1.1 研究背景信息融合是在多传感器、多源数据或多个系统之间有效地整合和利用信息的过程。
随着现代技术的发展,我们面临着海量的信息来源,如何从中提取有用的信息成为一个关键的问题。
贝叶斯网络作为一种有效的概率模型,在信息融合领域中得到了广泛的应用。
1.2 研究目的与意义本文旨在研究和探索基于贝叶斯网络的信息融合方法,通过整合不同传感器或数据源的信息,提高信息的准确性和可靠性。
这对于提高决策制定和预测的精度具有重要的意义。
第二章:贝叶斯网络概述2.1 贝叶斯网络基本原理贝叶斯网络是一种概率图模型,其基本原理是利用贝叶斯定理来描述变量之间的关系。
该网络以有向无环图的形式表示变量之间的依赖关系,并通过条件概率表达这些依赖关系。
2.2 贝叶斯网络的建模过程建立贝叶斯网络的过程包括选择适当的变量、定义变量之间的依赖关系、估计条件概率、模型训练和验证等步骤。
本章将详细介绍贝叶斯网络的建模过程。
第三章:贝叶斯网络在信息融合中的应用3.1 传感器融合传感器融合是信息融合的重要应用领域之一。
本节将介绍如何通过贝叶斯网络将多个传感器的信息进行整合,以提高传感器数据的准确性和鲁棒性。
3.2 数据库集成数据库集成是在分布式环境下整合多个数据库中的信息,以提供一致性和全面性的查询结果。
本节将讨论如何使用贝叶斯网络解决数据库集成中的信息冲突和不完整性问题。
3.3 多源决策在多个决策源的情况下,贝叶斯网络可以帮助我们将不同决策源的信息进行整合,以制定更准确和可靠的决策。
本节将介绍贝叶斯网络在多源决策中的应用。
第四章:基于贝叶斯网络的信息融合方法研究4.1 贝叶斯网络结构学习方法贝叶斯网络的结构学习是一个关键问题,在信息融合中,选择合适的网络结构非常重要。
本章将介绍现有的贝叶斯网络结构学习方法,并讨论其优缺点。
4.2 贝叶斯网络参数学习方法在贝叶斯网络中,变量之间的条件概率需要通过观测数据进行估计。
基于虚实试验数据融合的装备测试性评估方法

设现场共进行了 n 次测试性试验,其中试验失
L ( P; nf ) = C n P
f
折合前后提供的总信息量相等,即 I = I 。对子单
m
ì
( si ln si + ci ln ci - ni ln ni )
ïï
å
i=1
ín =
p ln p + (1 - p)ln(1 - p)
ïï
c
=
n(1
p)s = np
的平均信息量为
H i = - pi ln pi + (1 - pi ) ln (1 - pi )
4.2
(5)
则第 i 个子单元提供的信息量为 Ii = ni H i ,而
(Fault Detection Rate,FDR)为 P ,则其先验分布为
π ( P ) = Beta ( P; αβ ) =
2
(α + β + 1)(α + β )
(6)
假定 n 为等效折合后开展试验的总次数,c 为
试验中失败的次数,p 为子系统在试验中成功的概
率,1 - p 为失败的概率。则在 n 次试验中,该单元
的等效总信息量为
I ' = -n[ p ln p + (1 - p ) ln (1 - p )]
(7)
4.2.2
特性论证评价。
132
王
总第 324 期
旋等:基于虚实试验数据融合的装备测试性评估方法
Bayes 公式作为基础,带入装备实物试验收集的数
3
性评估结果,完成装备测试性水平的评估。
基于虚拟仿真试验信息的先验分
布参数确定
2
试验数据信息分析
不确定性数据融合方法的研究与应用
不确定性数据融合方法的研究与应用随着信息技术的发展,人们可以收集更多的数据来进行分析和决策。
但是,数据的质量、可靠性、完整性等方面的不确定性也越来越明显。
在这个时候,如何将多个具有不确定性的数据信息进行融合,提高数据信度,成为了一个重要的问题。
数据融合是多个数据来源的信息汇聚过程,目的是有效地提高信息的可靠性、减少错误率和误判率。
在数据融合中,涉及到数据的分类、聚类、拟合、预测等,这些过程都面临不确定性的挑战。
在解决不确定性问题中,概率论是一种可行的方法。
基于概率论的数据融合方法,可以对不同来源的数据进行概率计算和融合,从而提高信息的可靠性。
同时,随着统计学和人工智能等技术的发展,出现了很多新的不确定性数据融合方法,如贝叶斯网络、模糊逻辑、遗传算法等。
贝叶斯网络是一种常用的不确定性数据融合方法。
尤其是在决策系统领域中,贝叶斯网络被广泛应用。
贝叶斯网络是一种表达概率关系的图模型,可以利用贝叶斯公式来计算条件概率。
在实际应用中,利用贝叶斯网络对数据进行建模和预测,可以大大提高决策的准确性和精度。
模糊逻辑是一种用于描述不确定性或模糊性的逻辑系统。
与传统的布尔逻辑不同,模糊逻辑的计算结果是一个介于0和1之间的实数,这个实数反映了模糊语言的描述程度。
因此,在数据融合中,模糊逻辑可以用于处理模糊或不确定性的信息。
例如,对于一个人的身高,如果说他比一般人高,但不是特别高,这个描述就可以用模糊逻辑来表示,从而进行数据的融合和计算。
遗传算法是一种模拟遗传和自然选择的优化方法,可以用来处理多变量和多目标的问题。
在数据融合中,遗传算法可以用来寻找各个数据来源的最佳组合和权重,从而提高数据融合的效果。
例如,在风电预测中,利用遗传算法可以找到不同气象站点和预测算法的最佳组合和权重,从而提高风力的预测精度。
除了上述方法外,还有一些新的方法正在逐步应用到数据融合中,如深度学习、神经网络等。
这些方法可以自动地从数据中学习规律和模式,从而在不确定的情况下,准确地进行数据分析和融合。
态势感知中的数据融合和决策方法综述

态势感知中的数据融合和决策方法综述作者简介:盖伟麟(1987-),男,硕士研究生,主研方向:网络与信息安全,态势感知;辛丹、王璐,硕士研究生;刘欣,讲师、博士;胡建斌,副教授、博士。
收稿日期:2013-03-05 修回日期:2013-05-08 E-mail:gaiweilin54070225@态势感知中的数据融合和决策方法综述盖伟麟a,辛丹a,王璐b,刘欣a,胡建斌b(北京大学 a. 软件与微电子学院;b. 信息科学技术学院,北京 100871)摘要:在赛博空间态势感知的相关研究中,处理不确定、不精确的多源异构信息是态势认识过程中需要解决的一个重要问题。
为正确处理这些信息,提高对态势的认识,使得到的态势更具有正确性、时效性和全局性,研究数据融合方式和决策方式等现存的处理技术并进行综述。
数据融合包含贝叶斯网络、D-S 证据理论、粗糙集理论、神经网络、隐马尔科夫模型及马尔科夫博弈论等方式,决策方式涵盖认知心理学、逻辑学、风险管理等。
研究结果表明,目前的技术焦点呈现多样性,但在态势生成应用及验证方面仍有较大的改进空间。
关键词:赛博空间;态势感知;多源异构;数据融合;决策Review of Date Fusion and Decision-making Methodsin Situation AwarenessGAI Wei-lina, XIN Dana, WANG Lub, LIU Xina, HU Jian-binb(a. School of Software and Microelectronics; b. School of Electronics Engineering and Computer Science,Peking University, Beijing 100871, China)【Abstract】In the research of cyberspace situation awareness, how to deal with uncertain, inaccurate multi-source heterogeneous information is an important problem which needs to be solved in the process of situational understanding. In order to accurately handle withthe information, improve the awareness of the situation, make the situation more accuracy, timeliness and overall, the paper reviews theexisting technology focus, mainly including data fusion methods and decision-making methods. Data fusion methods mainly includes Bayesian network, D-S evidence theory, rough set theory, neural network, hidden Markov model and Markov game theory methods, and decision-making mainly includes cognitive psychology, logic and risk management methods. Research results show that current technologyfocuses present diversity, but still has great space for improvementin both the situation generation application and verification.【Key words】cyberspace; situation awareness; multi-source heterogeneous; data fusion; decision-makingDOI: 10.3969/j.issn.1000-3428.2014.05.005计算机工程Computer Engineering第40 卷第 5 期Vol.40 No.52014 年5 月May 2014·先进计算与数据处理·文章编号:1000-3428(2014)05-0021-05 文献标识码:A 中图分类号:TP311.131 概述赛博空间(cyberspace) 一词是由美国科幻小说作家William Gibson 创造的,指在计算机以及计算机网络里的虚拟现实,后来概念被普及和延伸,例如用来表示实时的网络空间等。
信息融合_第2章 检测融合
2.1 概论
检测融合的内容及其发展(2): • 1987年,给出了N-P融合系统的最优融合规则。最 优融合规则为似然比判决规则,判决门限则由融合 系统的虚警概率决定; • 1989年,Bayes融合系统的全局最优化问题:在各部 传感器观测独立的条件下,融合中心及各部传感器 的最优判决规则均为似然比判决规则; • 1991年,各部传感器观测相关条件下,N-P融合系 统的最优融合规则问题; • 1992年,各部传感器观测相关条件下, Bayes融合系 统的最优融合规则问题; • 1994年,分布式Bayes检测融合系统的异步检测问 题;
2.2 检测判别准则
• 假定信号存在与否的先验概率也是已知的: P(H0)——信号/目标不存在的概率 P(H1)——信号/目标存在的概率 显然,一个合理的判别准则是:观测结果y=y(t)与 哪一个假设同时存在的概率大,就判断哪个假设 是所需要的解答,即 P(H1,y) > P(H0,y),选H1 P(H1,y) < P(H0,y),选H0 根据贝叶斯定理(条件概率),有 P(H1,y) = P(y)P(H1|y) P(H0,y) = P(y)P(H0|y)
2.1 概论
• • 集中式检测融合本质上是假设检验问题,因此主 要讨论分布式检测融合。 分布式检测融合:各部分传感器首先基于自己的 观测进行判决,然后将判决结果传输到融合中心; 融合中心将各部传感器的判决作为自己的观测量, 并据此进行假设检验,形成最终的判决。 分布式软决策融合系统:全分布式检测融合中, 传感器仅向融合中心传送一位二进制判决信息, 通信量大为降低。但该判决信息不能充分反映传 感器的观测信息,融合系统性能下降。由于系统 的通讯能力可能有余,所以各传感器可根据系统 的通讯能力,传送多位2进制判决信息。采用多位 二进制数据表示的传感器判决称为软决策,相应 的融合系统称为分布式软决策融合系统。
信息融合概述
第二页,共三十一页。
1.4 信息(xìnxī)融合的分类
按融合技术分类
假设检验型
滤波(lǜbō)跟踪型人工智能(rén ɡōnɡ zhì nénɡ)模式识别型
聚类分析型
基于专家系统的
基于人工神经网络
以生物为基础
3
第三页,共三十一页。
1.4 信息融合的分类
按融合(ró nghé)判决方式
硬判决(pà njué)
分布式融合结构中,每个传感器的检测报告在进入融合以前,先由
它自己的处理器产生(chǎnshēng)局部多目标跟踪航迹,然后将处理过的信息送
至融合中心,完成航迹-航迹相关、航迹合成,形成全局估计。
检测与估计 传感器控制/反馈信息
传感器1
预处理
多目标 跟踪器
融合中心
传感器2
预处理
多目标 跟踪器
目标状态
航迹合成
神经网络
具有较强的特征分类与映射能力 很强的自适应能力 并行处理、运算效率高
学习过程运算量大 寻找全局最优解较为困难
29
第二十九页,共三十一页。
作业(zuòyè)
① 简述信息融合的基本思想。
② 信息融合处理结构的分类,并列举其主要优缺点。
③ 简述四种常用信息融合算法的优缺点。
④ 查阅信息融合技术(jìshù)在某一领域的具体应用实例,画出系统解 决方案图。
传感器1
传感器2
传感器N
12
第十二页,共三十一页。
联合属性判决结果 属性判决 特征提取 数据级融合
关联(guānlián) …
(1) 数据级融合
特点(tèdiǎn)
数据(shùjù)损失量较少 精度最高
不足(bùzú)
神经网络信息融合概述

在信息融合技术中,传统的方法有:加权平均法、Bayes方法、Kalman滤波、聚类分析等。
加权平均法是一种最简单和直观的方法,将多个传感器提供的冗余信息进行加权平均后作为融合值。
该方法能实时处理动态的原始传感器数据,但是调整和设定权系数的工作量很大,且具有一定的主观性;Bayes方法需要先验知识,且当存在多个与假设和条件相关的可得解时,算法复杂;Kalman滤波在干扰大的外界环境中,对系统进行状态评估的精度难以满足聚类分析也都需要较多的先验知识,不便使用。
在数据关联、分布式融合等系统中,传统的这些融合算法,大部分会存在计算组合爆炸,学习速度慢等缺点。
神经网络技术是由大量互联的处理单元连接而成,它基于现代神经生物学和认知科学在信息处理领域应用的研究成果,具有大规模的并行模拟处理、连续时间动力学和网络全局作用等特点,有很强的自适应能力,从而可以代替复杂耗时的传统算法,使信号处理过程更接近人类思维活动。
为了使被测系统自适应、并行、高效地融合信息,融合算法越来越多地将神经网络应用其中。
神经网络之所以受到人们如此重视,主要是因为它具有以下诸多优势:(1)学习能力.学习能力是神经网络具有智能的重要表现,即通过学习训练可抽象出训练样本的主要特征,表现出自适应能力。
(2)联想记忆功能。
由于神经网络具有分布存储信息和并行计算的特征,因此它具有对外界刺激信息和输入模式进行联想记忆的能力。
这一能力使其在分类、模式识别和图像复原等方面具有潜在应用价值。
(3)非线性映射。
神经网络可有效地实现输入空间到输出空间的非线性映射。
寻找输入到输出之间的非线性关系模型,这是工程界普遍面临的问题。
(4)分类和识别。
神经网络对外界输入样本具有强识别和分类能力。
对输入样本的分类实际上是在样本空间找出符合分类要求的分割区域,每个区域内的样本属于一类。
比传统分类器具有更好的分类和识别能力。
(5)知识处理。
神经网络能够从输入输出信息中提取规律而获得相关知识,并将知识分布在网络的连接中予以存储。
多源传感器信息融合技术
§8.3 卡尔曼(Kalman)滤波 Kalman 滤波器是从被提取信号有关测量中通过算法估计出所需信号,其中被估计信号 是由带有白噪声的激励引起的随机响应,激励源与响应之间的传递结构(系统方程)已知,
3
. . .
目 标 的观 测 分 类 与说 明
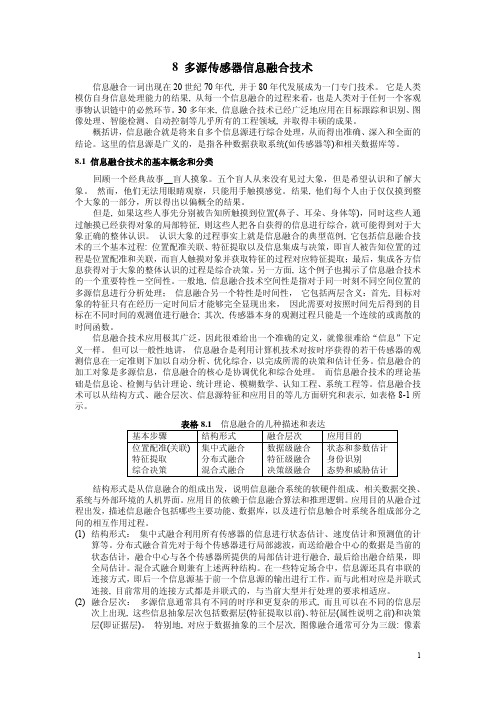
图 8-1 基于 Bayes 统计理论的信息融合过程
1
层(图像分割和边缘特征等提取之前)、 特征级融合和决策级融合(各特征独立属性说明之 后), 现有的融合算法主要是基于以上三个层次进行研究的。 (3) 应用目的:信息融合技术首先应用于军事领城,然后又逐渐发展到非军事领城。 它是 一个在多个级别上对传感器数据进行综合处理的过程, 每个处理级别都反映了对原始数 据不同程度的抽象,包括从检测到威胁判断、武器分配和通道组织的完整过程。其结果 表现为在较低级别对状态和属性的评估和在较高层次上对整个态势、威胁的估计。 这 一过程强调信息融合的核心是指对来自多个传感器的数据进行多级别、多方面、多层次 的处理,从而产生新的有意义的信息。对于非军事应用领域,信息融合是对多个传感器 和信息源所提供的关于某一环境特征的不完整信息加以综合和提升,以形成相对完整、 深入和一致的感知和认识,从而实现更加准确的识别和判断功能。 自上而下,表格 6.1.各列的分类按照每行有着某种对应关系,虽然这种关系并不严格甚至交 叠,但往往是可以对比并互相参照,反映了从低级到高级信息融合技术的处理层次。 并非多个信息源进行融合总是能够得到更好的和有用的信息。 应用的信息融合方法是 十分关键的, 它直接决定融合质量。 信息融合最基本的方法是将所有的输入数据在一个公共 当的形式输出和表达这些 数据。 应使用的基本方法包括概率统计、卡尔曼滤波、(有序)加权平均、证据理论、神经 网络和人工智能等许多解决途径。 8.2. 贝叶斯估计 贝叶斯(Bayes)方法用于多传感器信息融合时, 是将多传感器提供的各种不确定性信息表 示为概率, 并利用 Bayes 条件概率公式对它们进行融合,从而形成决策的一种方法。 8.2.1. Bayes 条件概率公式 设 A1 , A2 ,..., Am 为样本空间 S 的一个划分, 即满足 (1) Ai ∩ A j = φ ( i ≠ j ); (2) A1 ∪ A2 ∪ ... ∪ Am = S ; (3) P ( Ai ) > 0 (i = 1, 2,..., m) 。 则对任一事件 B, P ( B) > 0 ,满足下面 Bayes 公式:
基于贝叶斯压缩感知的子空间拟合离格DOA估计

基于贝叶斯压缩感知的子空间拟合离格DOA估计
高卫港;王鼎;张钺洋;李恺;吕静
【期刊名称】《电讯技术》
【年(卷),期】2023(63)2
【摘要】针对传统的基于稀疏贝叶斯学习(Sparse Bayesian Learning,SBL)的波达方向估计算法对噪声鲁棒性不高的问题,提出了一种基于SBL的子空间拟合离格波达方向(Direction of Arrival,DOA)估计方法。
首先对接收数据的协方差矩阵进行特征分解,获得信号的加权子空间,构造等价信号的稀疏表示模型并利用贝叶斯学习算法进行参数求解。
同时对于网格划分带来的建模误差问题,采用了离格贝叶斯推导(Sparse Bayesian Inference,SBI)算法进行求解,利用期望最大化算法迭代更新相应的参数。
仿真结果表明,相对于传统的DOA方法,该方法具有更好的估计精度。
【总页数】7页(P158-164)
【作者】高卫港;王鼎;张钺洋;李恺;吕静
【作者单位】解放军信息工程大学信息系统工程学院;中国人民解放军95851部队;中国人民解放军61416部队
【正文语种】中文
【中图分类】TN911
【相关文献】
1.基于酉变换和稀疏贝叶斯学习的离格DOA估计
2.基于贝叶斯压缩感知的子空间拟合DOA估计方法
3.一种强干扰环境下的离格稀疏贝叶斯DOA估计方法
4.基于子空间拟合的块稀疏贝叶斯学习DOA估计
5.基于噪声子空间矢量的OMP离格DOA估计
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在信 息 战场上 , 富的传 感器 系统 将获 取大 量 丰
得 到 或是 先验 概率 很难 估计 时 , 该方 法 的使用 就受
到限 制 。而改 进 的 B ys融合 方 法 不 需 要 估 计 事 ae
的信 息资 源 , 中有 一部 分信 息是 对 同一事 物不 同 其 侧 面 的反 映 。如何科 学合 理地 应用 这些 信息 , 到 得
维普资讯
第 9卷 第 3期
20 0 8年 9 月
信 息 工 程 大 学 学 报
J ur a fI f r t n En i e i g Unie st o n lo n o ma i gne rn o v ri y
Vo . . 1 9 NO 3 Se . 00 p 2 8
基 于 B ys ae 理论 的信 息 分 布 式 融 合 模 型 与仿 真
宋 留 勇 , 中庚 南 郑 州 40 0 ) 信 河 5 0 2
摘 要 : 分析 改进 的 B y s 在 ae 融合 方 法的基 础上 , 立 了多源信 息 的 串联 融 合模 型和 多 信息 源 的 建
信 息进 行 串联 融合 的基 础上 , 现多 个融 合结论 实 实 现 一次 并联 融合 , 终得 到事 件 发生 的确 切 的概 率 最 信息。
1 改 进 的 B y s 合 方 法 ae 融
改进 的 B y s 合 方 法 的思 想 就 是 把 一 个 信 ae 融
A b t a t Ba e n n lss o h meh d o mpr v d s r c : s d o a ay i ft e to f i o e Ba e , frt o l , t e a r bu l s t y s is f al h p pe id he
M eh d ft e I f r a i n Diti u e so s d o y sM eho n t p ia i n t o s o h n o m to srb t d Fu i n Ba e n Ba e t d a d Is Ap lc to
S ONG L u—o g,HAN Z o g g n i yn h n — e g,DU i n p n Ja — ig
(n t ueo nomain E gn eig nomain E gn eigUnvri Isi t fIfr t . n ier ,I fr t n ie rn iesy,Z e gh u 4 0 0 C ia t o n o t h n z o 5 0 2, hn )
并联 融合模 型 , 出 了基 于 B ys 论 的信 息 分布 式 融合 方 法 。该 方 法 可 以实 现 多信 息 源 多 提 ae 理 信 息 的动 态实 时融合 ; 最后 应用 Ma a t b软 件进 行 了仿 真模 拟 , l 验证 了该 方 法的 可行 性。 关键 词 : ae ; 息 融合 ; 布 式融合 ; B y s信 分 串联 融合 ; 并联 融合 中图分 类号 : 2 O1 文献标 识码 : A 文章 编 号 :6 1 6 3 2 0 ) 3— 3 0—0 1 7 —0 7 ( 0 8 0 0 7 5
一
件 发 生 的先验 概率 , 以实 现信 息 的融合 。本文 提 可
出的 信息 分 布 式 融 合 方 法 就 是 基 于 改 进 的 B ys ae 理论 而实现 的 。该 方 法 在 对 各 信 息 源 获 得 的概 率
个精 确 的信 息结论 , 是实 际 中需 要 研究解 决 的 这
法 ¨ 对这 类信 息 的 融 合 即 可得 到一 个 比较 满 意 的结果 。在 给定证 据 的条 件下 , 传统 的 B ys 合 ae 融 方 法能够 推 理 出假 设 事 件 发 生 为真 的概 率 。它 可 以融合假 设 事件 发 生 为 真 时 的先 验 概 率 信 息 。此
m o l fm u t .n o ma i n a d m u t. o c n s r e n n p r le .t n g v s a m e h d o h n de s o lii f r t n o l s ur e i e i s a d i a a l 1 he i e t o ft e i . i
f r to iti u e u in o ma in d srb t d f so Th to c n f e m u iii f r in i e ltm e; we sm u ae h e meh d a us lt.n o ma o n r a i i lt d t e m eh d o h o u e .a d v l a e t e sbii . t o n t e c mp t r n a i td i fa i lt d s y K e o d Ba e ; if r ain f so y w r s: y s n o m to u in; d srbu e uso iti td f in;f so n s re ;f in i r le u in i e i s uso n pa all
重要 问题 。
信 息 中有一 部 分 信 息 结论 是 以概率 形 式 给 出 的, 并且 这 些信 息是 完 备 的 , 即对 事 件 发 生 和不 发 生 的概 率是 确定 , 不存 在不 确定 信息 。在 已知 事件 发 生 的先验 概率 的情 况下 , 用 传统 B y s 采 ae 融合 方