电动车正弦波控制技术
什么是正弦波电动车控制器
上世纪70年代西门子工程师F.Blaschke首先提出异步电机矢量控制理论来解决交流电机转矩控制问题。
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流) 和产生转矩的电流分量(转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式(正弦波控制方式)。
简单的说,矢量控制就是将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
这样就可以将一台三相异步电机等效为直流电机来控制,因而获得与直流调速系统同样的静、
siemens,AB,GE,Fuji等国际化大公司变频器上、国际知名品牌的电动汽车、电动摩托车的上面。
采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。
由于正弦波控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器。
鉴于电机参数有可能发生变化,会影响变频器对电机的控制性能,目前新型矢量控制通用变频器中已经具备异步电动机参数自动检测、自动辨识、自适应功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行辨识,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。
直流无刷电机的正弦波控制
直流无刷电机的正弦波控制传统的直流无刷电机采用方波控制方式,控制简单,容易实现,同时存在转矩脉动、换相噪声等问题,在一些对噪声有要求的应用领域存在局限性。
针对这些应用,采用正弦波控制可以很好的解决这个问题。
直流无刷电机的正弦波控制简介直流无刷电机的正弦波控制即通过对电机绕组施加一定的电压,使电机绕组中产生正弦电流,通过控制正弦电流的幅值及相位达到控制电机转矩的目的。
与传统的方波控制相比,电机相电流为正弦,且连续变化,无换相电流突变,因此电机运行噪声低。
根据控制的复杂程度,直流无刷电机的正弦波控制可分为:简易正弦波控制与复杂正弦波控制。
(1)简易正弦波控制:对电机绕组施加一定的电压,使电机相电压为正弦波,由于电机绕组为感性负载,因此电机相电流也为正弦波。
通过控制电机相电压的幅值以及相位来控制电流的相位以及幅值,为电压环控制,实现较为简单。
(2)复杂正弦波控制:与简易正弦波控制不同,复杂的正弦控制目标为电机相电流,建立电流环,通过直接控制相电流的相位与幅值达到控制电机的目的。
由于电机相电流为正弦信号,因此需要进行电流的解耦操作,较为复杂,常见的为磁场定向控制(FOC)及直接转矩控制(DTC)等。
本文将主要介绍简易正弦波控制的原理及其实现。
简易正弦波控制原理简易正弦波控制即通过控制电机正弦相电压的幅值以及相位达到控制电机电流的目的。
通常通过在电机端线施加一定形式的电压来使绕组两端产生正弦相电压。
常见的生成方式为:正弦PWM以及空间矢量PWM。
由于正弦PWM原理简单且便于实现,因此简易正弦波控制中通常采用其作为PWM生成方式。
图1为BLDC控制结构图,其中Ux、Uy、Uz为桥臂电压,Ua、Ub、Uc为电机绕组的相电压,以下对于不同种类的PWM调制方式的介绍将基于此结构图进行。
图1 直流无刷电机控制框图(1)三相正弦调制PWM三相SPWM为最常见的正弦PWM生成方式,即对电机三个端线施加相位相差120度的正弦电压信号,由于中性点为0,因此电机相电压也为正弦,且相位与施加的正弦电压相同。
bldc正弦波控制

bldc正弦波控制摘要:一、前言二、BLDC 正弦波控制介绍1.BLDC 的定义2.正弦波控制的优势三、BLDC 正弦波控制原理1.电机结构2.正弦波控制策略3.控制器的功能四、BLDC 正弦波控制应用领域1.工业自动化2.电动汽车3.家电产品五、BLDC 正弦波控制的发展趋势1.高效率2.低噪音3.智能化六、结论正文:一、前言无刷直流电机(BLDC)正弦波控制是一种高效、节能、噪音低的电机控制策略。
随着工业自动化、电动汽车以及家电产品等领域的迅速发展,BLDC 正弦波控制技术在这些领域得到了广泛应用。
本文将详细介绍BLDC 正弦波控制的原理、应用及发展趋势。
二、BLDC 正弦波控制介绍1.BLDC 的定义无刷直流电机(BLDC)是一种采用电子换向技术替代传统碳刷换向的直流电机。
它具有较高的运行效率、较长的使用寿命和较低的噪音。
2.正弦波控制的优势BLDC 正弦波控制可以实现对电机的高效、精确控制,提高电机性能。
与传统方波控制相比,正弦波控制具有更优越的性能,如较低的电磁噪音、更平稳的转矩输出等。
三、BLDC 正弦波控制原理1.电机结构BLDC 电机主要由定子、转子、电子换向器和控制器等部分组成。
其中,电子换向器负责为转子提供三相交流电源,控制器负责控制电子换向器的换向,从而实现对电机的控制。
2.正弦波控制策略BLDC 正弦波控制策略主要是通过调整电子换向器的换向时间,使电机运行在正弦波形电流状态,从而实现对电机的高效、精确控制。
3.控制器的功能控制器负责计算正弦波形电流的脉冲宽度调制(PWM)信号,并根据电机的实际运行状态调整PWM 信号的占空比,从而实现对电机的速度、转矩等参数的精确控制。
四、BLDC 正弦波控制应用领域1.工业自动化BLDC 正弦波控制在工业自动化领域得到了广泛应用,如机器人、输送带、压缩机等。
它能够提高设备的运行效率、降低维护成本,并满足高精度控制的需求。
2.电动汽车BLDC 正弦波控制在电动汽车领域也有着广泛的应用,如电动助力转向、空调压缩机、油泵等。
电动车 正弦波 矢量
电动车正弦波矢量
电动车正弦波矢量控制技术是将交流电动机内部的转矩和磁场分离控制,使得电机能够在更广泛的转速、负载下达到更高的效率和性能。
具体来说,正弦波控制器通过PWM(脉冲宽度调制)调节电机输出电压和电流,而矢量控制器则采用FOC(场定向控制)技术,将电机内部的转矩和磁场进行分离并独立控制,以提高电机的效率和性能。
正弦波矢量控制技术应用于电动车中,具有以下优点:
1.更高的控制精度:正弦波矢量控制技术能够根据电机的实际负载情况实时调
节电机的转速,提供较高的转速控制精度。
2.更高的效率:正弦波矢量控制技术能够将电机内部的转矩和磁场进行分离并
独立控制,使得电机在更广泛的转速、负载下达到更高的效率和性能。
3.更好的启动性能:正弦波矢量控制技术能够提供较强的扭矩,使电机在相对
较小的电池电流工况下正常工作,实现重载启动、高效运行,提供平顺的加速和爬坡能力,延长电机使用寿命。
4.更好的保护功能:正弦波矢量电机控制器具有严格的电流限制和转矩控制,
不会触发电池限流保护,延长电池寿命。
同时,它还具有过温保护和电池保护功能,保护控制器和电池不受损害。
5.更强的抗干扰能力:正弦波矢量电机控制器具有很强的抗电磁干扰和抗振动
性能,能够在恶劣的工作环境下稳定运行。
正弦波矢量控制技术应用于电动车中,可以提高电机的控制精度、效率、启动性能、保护功能和抗干扰能力,从而提升电动车的整体性能和使用体验。
直流无刷电动自行车控制器正弦波解决方案
时间控制的电机控制 PWM 模块,非常适合于直流无刷电机/永磁同步电机控制。 此外,G80F960A 集成了看门狗定时器,上电复位和低电压复位等功能,提供了 2 种低功耗省电模式。
2、正弦波控制器主要功能概述: ■ 自动测相功能 ■ 限流控制 ■ 过流保护 ■ 堵转保护 ■ 欠压保护 ■ 防飞车功能 ■ 自动巡航 ■ 助力功能 ■ 电子刹车与反充电功能 ■ 倒车功能 ■ 防盗功能
直流无刷电机的正弦波控制器实物图
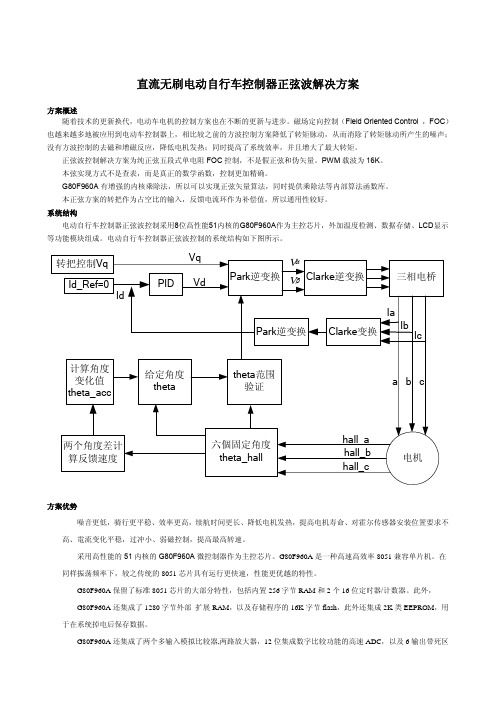
转把控制Vq Id_Ref=0 Id
Vq PID Vd
V Park逆变换 V Clarke逆变换
三相电桥
Park逆变换
Ia
Clarke变换
Ib Ic
计算角度 变化值 teta范围 验证
abc
两个角度差计 算反馈速度
六個固定角度 theta_hall
hall_a hall_b hall_c
正弦波控制解决方案为纯正弦五段式单电阻 FOC 控制,不是假正弦和伪矢量。PWM 载波为 16K。 本弦实现方式不是查表,而是真正的数学函数,控制更加精确。 G80F960A 有增强的内核乘除法,所以可以实现正弦矢量算法,同时提供乘除法等内部算法函数库。 本正弦方案的转把作为占空比的输入,反馈电流环作为补偿值,所以通用性较好。 系统结构 电动自行车控制器正弦波控制采用8位高性能51内核的G80F960A作为主控芯片,外加温度检测、数据存储、LCD显示 等功能模块组成。电动自行车控制器正弦波控制的系统结构如下图所示。
电机
方案优势 噪音更低,骑行更平稳、效率更高,续航时间更长、降低电机发热,提高电机寿命、对霍尔传感器安装位置要求不
正弦波驱动的工作原理foc
正弦波驱动的工作原理foc
FOC(Field-oriented Control,场导向控制)是一种高性能电机驱动技术,常用于交流电机驱动。
FOC的工作原理是通过将电机的电磁场分为直轴和交轴两个独立的分量,通过控制这两个分量的大小和相位来实现对电机的驱动控制。
具体来说,FOC可以分为两个主要步骤:电流分量分解和控制。
1. 电流分量分解:FOC首先对输入的三相交流电压进行变换,将三相电压转化为直轴分量和交轴分量。
这个过程通过空间矢量调制(Space Vector Modulation)来实现。
在空间矢量调制中,输入的三相电压被转化为两个分量:- 直轴分量:与电机旋转同步,驱动电机产生转矩。
- 交轴分量:与电机旋转正交,用于控制电机的磁场。
2. 控制:FOC接下来通过对直轴和交轴分量的控制来实现对电机的控制。
- 对于直轴分量,通过调节电压的大小和相位,控制电机的输出转矩。
- 对于交轴分量,可以保持其恒定,使得电机的磁场产生适当的旋转速度。
通过对直轴和交轴分量进行高精度的闭环控制,FOC可以实现对电机的高效率、高响应、低噪音的控制。
这种控制方式广泛应用于电机驱动领域,特别是对于需要高性能控制的应用,如电动车、机器人等。
bldc正弦波控制

bldc正弦波控制
BLDC (Brushless DC) 正弦波控制是一种用于驱动无刷直流电机的控制方法。
正弦波控制通过产生一个类似正弦波的电流来控制电机的转速和位置。
BLDC电机由三个相互差120度的线圈组成,这些线圈也被称为相。
每个相都需要正弦波形式的电流来驱动。
为了产生这些正弦波形的电流,需要使用一种称为电调器的电子设备。
BLDC正弦波控制的流程如下:
1. 传感器检测:使用位置传感器(通常是霍尔效应传感器)来检测转子的位置。
2. 位置检测:根据传感器的反馈信息确定转子的位置。
3. 电调器信号生成:根据转子的位置信息,控制电调器生成相应的正弦波形电流。
4. 电流控制:将正弦波形电流送入每个线圈以控制电机。
5. 转速和位置控制:通过改变正弦波形电流的振幅和频率,以控制电机的转速和位置。
BLDC正弦波控制的优点是可以提供平稳的转速和位置控制,减少功耗和噪声,并且增加电机的效率。
与传统的方波控制相比,BLDC正弦波控制可以减少谐波产生,提供更好的运动平滑性和精准性。
bldc正弦波控制
bldc正弦波控制【实用版】目录1.BLDC 正弦波控制的概述2.BLDC 正弦波控制的原理3.BLDC 正弦波控制的优点4.BLDC 正弦波控制的应用5.BLDC 正弦波控制的未来发展趋势正文一、BLDC 正弦波控制的概述BLDC,全称为 Brushless Direct Current,即无刷直流电机。
BLDC 正弦波控制是一种应用于无刷直流电机的高效控制策略,通过正弦波形来调整电机的转速和转矩。
相较于传统的直流电机控制方式,BLDC 正弦波控制在性能上具有明显优势,因此在许多领域得到了广泛应用。
二、BLDC 正弦波控制的原理BLDC 正弦波控制的核心思想是通过对电机电流进行正弦波形调整,实现对电机转速和转矩的精确控制。
具体来说,首先需要对电机的反电动势进行采集和处理,得到电机的转速和转矩信息。
然后,根据预设的转速和转矩要求,生成相应的正弦波电流信号,并将其作用于电机,从而实现对电机的精确控制。
三、BLDC 正弦波控制的优点1.高效节能:相较于传统的直流电机控制方式,BLDC 正弦波控制在电机转矩和转速的调节上更加精确,可以有效降低电机的能耗,提高能源利用效率。
2.控制精度高:通过对电机电流的正弦波形调整,BLDC 正弦波控制能够实现对电机转速和转矩的精确控制,满足各种高精度定位和速度控制的需求。
3.系统稳定性好:BLDC 正弦波控制通过对电机反电动势的实时采集和处理,能够有效提高系统的稳定性,降低因电机参数变化等因素引起的系统波动。
四、BLDC 正弦波控制的应用BLDC 正弦波控制在许多领域都有广泛应用,如工业自动化、家用电器、电动汽车等。
尤其是在工业自动化领域,BLDC 正弦波控制可以实现对电机的高精度控制,提高生产效率和产品质量,降低生产成本。
五、BLDC 正弦波控制的未来发展趋势随着科技的不断进步,BLDC 正弦波控制在电机控制领域具有巨大的发展潜力。
未来,BLDC 正弦波控制将在以下几个方面进行深入研究和应用:1.控制策略的优化:通过引入智能优化算法,进一步提高 BLDC 正弦波控制的控制精度和系统稳定性。
正弦波控制原理

正弦波控制原理
正弦波控制原理是一种基于正弦函数形式的控制方法。
其原理是通过改变正弦波的某些参数,来实现对系统的控制。
正弦波控制常用于电力系统中,可以实现对电压、电流等变量的调节。
在正弦波控制中,主要涉及到两个参数:频率和幅值。
频率是指正弦波的周期性振荡的速度,决定了波形的快慢。
而幅值则表示波形的振幅大小,即波形的最大值和最小值的差距。
通过改变正弦波的频率,可以实现对系统的快慢响应。
当频率较高时,系统的响应速度快,但可能会引起不稳定性问题;而频率较低时,系统的响应较慢,但可以更好地保持稳定。
而改变正弦波的幅值,则可以实现对系统的增益控制。
增大正弦波的幅值可以增加系统的响应强度,反之则减小系统的响应。
通过控制幅值,可以在需要时增强系统的输入信号,以满足特定的要求。
正弦波控制原理的优点是其形式简单、易于理解和实现。
此外,正弦波是一种周期性的波形,可以方便地用于对周期性系统的控制。
但同时,正弦波控制也存在一些限制,如需要提前知道系统的特性以确定合适的频率和幅值,以及对于非周期性系统的控制效果可能较差等。
总之,正弦波控制原理是一种常用的控制方法,通过改变正弦波的频率和幅值,可以实现对系统的调节和控制。
这种控制方
法简单易懂,但也存在一些局限性,需要根据具体系统的特性进行选择和应用。
正弦波无刷电机控制器 里程版参数
正弦波无刷电机控制器里程版参数
正弦波无刷电机控制器,是一种利用电子技术控制电机运动的新兴设备。
它可通过无限调节圆柱形电机的转速,改变电机控制系统的转速,提供出色的精度,清晰的操控和高功率效率。
正弦波无刷电机控制器,主要用于汽车里程表等汽车零部件,其可以精确的计算出汽车的行驶的里程。
正弦波无刷电机控制器的原理是:首先,当正弦波信号接通到电机控制器,正弦波经电阻器和变压器转变成比较低的电压,经晶体管整形成正弦波的电压,然后经上电到电机,将正弦波转换成对应的驱动力,以实现电机的无级调速功能。
正弦波无刷电机控制器具有众多优点,首先,它可以提供更精确的控制功能,可以实现电机的无级调速,可以调节出理想的速度;其次,它的噪声较低,结构紧凑,体积小;第三,它的动态响应特性佳,其控制精度高,保证设备的可靠运行;最后,它可以实现电机里程版参数控制,确保汽车行驶的里程数正确。
正弦波无刷电机控制器的出现,深深影响了我们的用电环境,它被广泛用于各种电子产品和汽车里程表等汽车零部件。
其可以精确的计算出汽车的行驶里程,相比传统的汽车里程表,它更安全、精准和可靠。
怎么辨别电动车的控制器是方波的还是正弦波的?

怎么辨别电动车的控制器是方波的还是正弦波的?
无刷直流电机是电机与控制技术相结合的产品,电调控制电机的运行,从电流驱动的角度看,无刷直流电机可以分为方波驱动和正弦波驱动。
通常我们将方波驱动的电机称之为无刷直流电机(BLDC),正弦波驱动的电机称之为永磁同步电机(PMSM)。
无刷直流电机和永磁同步电机的基本结构相同,主要区别在于控制器电流驱动方式不同。
无刷直流电机是方波电流驱动,永磁同步电机是正弦波电流驱动。
我们要将电机的气隙磁密波形与驱动电流波形相匹配,才能发挥出电机更好的性能。
因此,无刷直流电机的气隙磁密波形也要设计成方波,而永磁同步电机气隙磁密波形则要设计成正弦波。
无刷直流电机和永磁同步电机在性能上,在转矩平稳上存在着较大的差异。
电机运行时的转矩波形有许多因素造成,齿槽效应是无刷直流电机和永磁同步电机转矩波动的共同因素。
目前减小齿槽效应的措施也有多种,常见的如定子斜槽、转子斜极、分数槽等。
在理想情况下,无论是无刷直流电机还是永磁同步电机,电流与转矩的特性曲线是呈线性变化的,不管电机运转在任何位置都不会有转矩波动。
在实际情况下,由于无刷直流电机的绕组存在电感,它妨碍了电流的快速变化。
在换相过程中,电流从最大值到最小值、最小值到最大值切换过程需要一定时间。
因此,输入到无刷电机中的电流波形是梯形而不是矩形的。
正是这种偏离导致无刷直流电机存在换相转矩波动。
在永磁同步电机中驱动器换相转矩波动几乎是没有的,它的转矩波动主要是由电流纹波造成的,而且在高速运转时,这些纹波转矩将会随着转子的惯性过滤掉。
什么是正弦波电动车控制器
上世纪70年代西门子工程师F.Blaschke首先提出异步电机矢量控制理论来解决交流电机转矩控制问题。
矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
具体是将异步电动机的定子电流矢量分解为产生磁场的电流分量(励磁电流) 和产生转矩的电流分量(转矩电流) 分别加以控制,并同时控制两分量间的幅值和相位,即控制定子电流矢量,所以称这种控制方式称为矢量控制方式(正弦波控制方式)。
简单的说,矢量控制就是将磁链与转矩解耦,有利于分别设计两者的调节器,以实现对交流电机的高性能调速。
矢量控制方式又有基于转差频率控制的矢量控制方式、无速度传感器矢量控制方式和有速度传感器的矢量控制方式等。
这样就可以将一台三相异步电机等效为直流电机来控制,
siemens,AB,GE,Fuji等国际化大公司变频器上、国际知名品牌的电动汽车、电动摩托车的上面。
采用矢量控制方式的通用变频器不仅可在调速范围上与直流电动机相匹配,而且可以控制异步电动机产生的转矩。
由于正弦波控制方式所依据的是准确的被控异步电动机的参数,有的通用变频器在使用时需要准确地输入异步电动机的参数,有的通用变频器需要使用速度传感器和编码器。
鉴于电机参数有可能发生变化,会影响变频器对电机的控制性能,目前新型矢量控制通用变频器中已经具备异步电动机参数自动检测、自动辨识、自适应功能,带有这种功能的通用变频器在驱动异步电动机进行正常运转之前可以自动地对异步电动机的参数进行辨识,并根据辨识结果调整控制算法中的有关参数,从而对普通的异步电动机进行有效的矢量控制。
直流无刷电机简易正弦波控制
1.前言随着控制技术的发展以及社会对节能要求的提高,直流无刷电机作为一种新型、高效率的电机被得到了广泛的应用。
传统的直流无刷电机采用方波控制方式,控制简单,容易实现,同时存在转矩脉动、换相噪声等问题,在一些对噪声有要求的应用领域存在局限性。
针对这些应用,采用正弦波控制可以很好的解决这个问题。
2.直流无刷电机的正弦波控制简介直流无刷电机的正弦波控制即通过对电机绕组施加一定的电压,使电机绕组中产生正弦电流,通过控制正弦电流的幅值及相位达到控制电机转矩的目的。
与传统的方波控制相比,电机相电流为正弦,且连续变化,无换相电流突变,因此电机运行噪声低。
根据控制的复杂程度,直流无刷电机的正弦波控制可分为:简易正弦波控制与复杂正弦波控制。
(1)简易正弦波控制:对电机绕组施加一定的电压,使电机相电压为正弦波,由于电机绕组为感性负载,因此电机相电流也为正弦波。
通过控制电机相电压的幅值以及相位来控制电流的相位以及幅值,为电压环控制,实现较为简单。
(2)复杂正弦波控制:与简易正弦波控制不同,复杂的正弦控制目标为电机相电流,建立电流环,通过直接控制相电流的相位与幅值达到控制电机的目的。
由于电机相电流为正弦信号,因此需要进行电流的解耦操作,较为复杂,常见的为磁场定向控制(FOC)及直接转矩控制(DTC)等。
本文将主要介绍简易正弦波控制的原理及其实现。
3.简易正弦波控制原理简易正弦波控制即通过控制电机正弦相电压的幅值以及相位达到控制电机电流的目的。
通常通过在电机端线施加一定形式的电压来使绕组两端产生正弦相电压。
常见的生成方式为:正弦PWM以及空间矢量PWM。
由于正弦PWM原理简单且便于实现,因此简易正弦波控制中通常采用其作为PWM生成方式。
图1为BLDC控制结构图,其中Ux、Uy、Uz为桥臂电压,Ua、Ub、Uc为电机绕组的相电压,以下对于不同种类的PWM调制方式的介绍将基于此结构图进行。
图1 直流无刷电机控制框图(1)三相正弦调制PWM三相SPWM为最常见的正弦PWM生成方式,即对电机三个端线施加相位相差120度的正弦电压信号,由于中性点为0,因此电机相电压也为正弦,且相位与施加的正弦电压相同。
正弦波无刷电机原理

正弦波无刷电机原理
无刷电机是一种电动机,它的原理是利用电磁感应产生转矩,
从而驱动机械运动。
而正弦波无刷电机是一种特定类型的无刷电机,它的原理是通过产生正弦波形的电流来驱动电机转动。
正弦波无刷电机的原理涉及到电磁感应和电流控制两个方面。
首先,当正弦波形的电流通过电机的线圈时,会在线圈中产生磁场。
这个磁场会与电机中的永磁体或者其他磁场产生相互作用,从而产
生转矩,驱动电机转动。
正弦波形的电流可以通过控制器来产生,
控制器会根据电机转子的位置和转速来调节输出的电流波形,以实
现对电机的精确控制。
另外,正弦波无刷电机通常采用霍尔传感器或者编码器来检测
转子的位置,从而确定何时以何种方式给电机施加电流。
这种闭环
控制可以使电机在不同负载和转速下都能保持稳定的运行,并且提
高了电机的效率和精度。
总的来说,正弦波无刷电机利用正弦波形的电流和闭环控制来
产生转矩,驱动电机转动。
它的原理涉及到电磁感应、电流控制和
闭环反馈等多个方面,是一种高效、精密的电动机驱动技术。
卡伯尔两轮三轮通用正弦波控制器说明书

卡伯尔两轮三轮通用正弦波控制器说明书一、产品概述卡伯尔两轮三轮通用正弦波控制器是一种用于电动车辆的控制器,能够实现对电动车辆的速度、转向等参数进行精确控制。
该控制器采用正弦波控制技术,具有高效、稳定、低噪音等特点,能够提供舒适的驾驶体验。
二、产品特点1. 正弦波控制技术:采用正弦波控制技术,能够提供平稳的动力输出,减少驾驶时的颠簸感,提升驾驶舒适度。
2. 高效能:控制器采用高效率电路设计,能够最大程度地提高电能的利用效率,延长电池的续航里程。
3. 稳定可靠:控制器内置多种保护功能,如过流保护、过压保护、欠压保护等,能够保证电动车辆的安全运行。
4. 多功能:控制器支持多种操作模式,如普通模式、运动模式、节能模式等,能够满足不同驾驶需求。
5. 易安装:控制器采用插拔式设计,安装简便快捷,方便用户自行安装和维修。
三、使用方法1. 安装控制器:将控制器与电动车的电池、电机等部件连接好,确保连接牢固可靠。
2. 选择操作模式:根据实际需求选择合适的操作模式,可通过按键或手机APP进行设置。
3. 调节参数:根据个人喜好和驾驶习惯,调节控制器的速度、刹车、转向等参数。
4. 开始驾驶:将电动车开关打开,根据需要踩下油门或刹车,即可开始驾驶。
四、注意事项1. 安全驾驶:在驾驶过程中,应注意交通规则,确保自身和他人的安全。
2. 防止水浸泡:控制器应安装在干燥通风的位置,避免受到雨水或水浸泡。
3. 定期检查:定期检查控制器的连接线路是否松动,电池是否充电正常,以确保电动车的正常运行。
4. 避免高温环境:控制器应避免长时间暴露在高温环境中,以免影响性能和寿命。
5. 维修保养:若发现故障或异常情况,应及时联系专业维修人员进行维修和保养。
五、常见问题解答1. 控制器如何调节速度?答:可以通过控制器上的速度调节按钮或手机APP进行调节,根据需要增加或减少速度。
2. 控制器如何调节刹车力度?答:可以通过控制器上的刹车调节按钮或手机APP进行调节,根据需要增加或减少刹车力度。
直流无刷电机的正弦波控制

直流无刷电机的正弦波控制直流无刷电机(BLDC)是一种高效、可靠且广泛应用于各种领域的电机。
正弦波控制是一种常用的控制方法,可以提供更平滑、高效的电机运行。
正弦波控制的基本原理是通过调整电机的相电流,使其与正弦波形相匹配。
这种控制方法可以减少电机的振动和噪音,并提高其效率和性能。
在正弦波控制中,首先需要获取电机的位置信息。
这可以通过使用位置传感器(如霍尔传感器)或无传感器(传感器)的方法来实现。
位置信息可以用于确定电机的转子位置,从而确定相电流的相位。
一旦获取了位置信息,就可以根据所需的转速和负载要求来计算相电流的大小和相位。
这可以通过使用控制算法(如PID控制)来实现。
控制算法将根据电机的实际位置和所需位置之间的差异来调整相电流的大小和相位,以实现精确的控制。
正弦波控制还可以通过使用逆变器来实现。
逆变器将直流电源转换为交流电源,并提供所需的正弦波形。
逆变器的输出将通过功率放大器传递给电机的相线圈,从而控制电机的运行。
正弦波控制具有许多优点。
首先,它可以提供更平滑的电机运行,减少振动和噪音。
其次,它可以提高电机的效率和性能,使其在不同负载条件下都能保持稳定的运行。
此外,正弦波控制还可以提供更高的转矩和更广泛的速度范围。
然而,正弦波控制也存在一些挑战。
首先,它需要准确的位置信息和复杂的控制算法,以实现精确的控制。
其次,逆变器和功率放大器的设计和实现也需要一定的技术知识和经验。
此外,正弦波控制的成本通常较高,因为它需要更复杂的硬件和软件。
正弦波控制是一种高效、可靠的直流无刷电机控制方法。
它可以提供更平滑、高效的电机运行,并具有更好的性能和稳定性。
然而,它也需要准确的位置信息和复杂的控制算法,以及相应的硬件和软件支持。
随着技术的不断发展,正弦波控制在各个领域的应用将会越来越广泛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、按照T计算可以消除霍尔安装误差以及沿延迟。 2、按照T1~T6计算可以消除速度突然变化时的角度计算误差。
43
180度控制模式的关键技术分析
整体系统控制结构
44
第四部分 180度正弦波矢量控制的实现
45
180度控制模式的实现
电流重构的实现要求
电流采样对MCU的要求
能定时采样 采样速度快
A Y Z
Fad S N
Faq Fa C X II
B Fr I
如图所示,电枢 磁动势的直轴分 量Fad对转子主磁 极产生最大去磁 作用
13
无刷直流电机的基本控制技术
无刷直流电机的电枢反应
A Y S Z
Fa C Faq
N
Fad X
B I
如图所示,电枢磁 动势的直轴分量Fad 对转子主磁极产生 最大增磁作用。
注:本电路采用内部运放作为瞬时电流保护和电流检测。 实际应用还应采用运放进行平均电流的采样保护
56
180度控制模式的实现
180度正弦波控制的特点分析
1、矢量控制 保证恒定转矩电流,消除电机的增磁和去磁反应。 2、两相PWM调制 降低开关损耗,提高系统效率。 3、相电流重构技术 适时监测相电流的大小,从而实现电流控制和保护。
Hall IC
霍尔元件功能方框图 霍尔元件磁电转换
18
无刷直流电机的基本控制技术
无刷直流电动机转子位置信号的检测-霍尔元件
1、三个霍尔元件在 空间依次相差120o电 角度 2、传感器磁极与转 子磁极同轴旋转、极 数相等、极性相对应
19
无刷直流电机的基本控制技术
霍尔元件的安装方式
20
无刷直流电机的基本控制技术
51
180度控制模式的实现
180度正弦波控制的硬件结构
+48V 7805 +5V
Speed set Brake signal Astern Indication Three-step ………… uPD78F1213 Discrete Circuit Drive
LM317T +15V
BLDC
52
180度控制模式的实现
upper arm PWM upper arm ON
28
120度控制模式下的性能分析
120度模式下的PWM调制类型__ON-PWM
Lower arm ON Lower arm PWM
both arm off
upper arm ON upper arm PWM
29
120度控制模式下的性能分析
120度模式下的PWM调制类型__PWM-ON-PWM
式中 数;
αm
2
= 2F sin ϕ
αm
2
= 2IaW Kwsin ϕ
αm
2
Fϕ ——每相绕组的磁动势; Wϕ—— 每 相 绕 组 的 串 联 匝
Kw——绕组系数。 由于在无刷直流电动机中磁状态角比较大,直轴电枢反 应磁动势可以达到相当大的数值,为了避免使永磁体发 生永久失磁,在设计时必须予以注意。
三相PWM调制
36
180度控制模式的关键技术分析
三相电流重构技术
单电阻电流采样情况下一个PWM周期的瞬时电流波形
37
180度控制模式的关键技术分析
矢量旋转变换__正变换与反变换
isd = isα cos θ + isβ sin θ isq = −isα sin θ + isβ cos θ
uα = u d cos θ − u q sin θ u β = ud sin θ + u d cos θ
180度正弦波控制的硬件结构__电源电路
注:由一个运放以及其他器件组成的其他形式的电路以代 替LM317T。
53
180度控制模式的实现
180度正弦波控制的硬件结构__HALL检测
54
180度控制模式的实现
180度正弦波控制的硬件结构__功率驱动
55
180度控制模式的实现
180度正弦波控制的硬件结构__功率驱动
15
无刷直流电机的基本控制技术
无刷直流电机的转矩脉动
转矩脉动定义为 转矩脉动的主要原因 (1)电磁因素引起的转矩脉动 (2)换相引起的转矩脉动 ; (3)定子齿槽引起的转矩脉动; (4)电枢反应的影响 ; (5)机械工艺引起的转矩脉动
Tmax − Tmin Tr = × 100% TN
16
无刷直流电机的基本控制技术
1213的特点: 可由两路同步定时器触发AD采样 采样速度最快可达2.5uS 内部高速运算放大器
46
180度控制模式的实现
位置角度的计算
1、采用查询模式 2、多周期与单周期方法的计算
47
180度控制模式的实现
矢量控制的实现
运算速度要求较高 特别是需要较多的乘法运算
1213的特点: 40MHz 内部高速振荡器 内部16*16乘法器 内部32/32除法器 满足运算要求!
II
Fr
可见,在一个磁状态范围内,电枢磁动势在刚开始为最大去磁,然 后去磁磁动势逐渐减小;在1/2磁状态时既不去磁也不增磁;在后半 个磁状态内增磁逐渐增大,最后达到最大值。增磁和去磁磁动势的 大小等于电枢合成磁动势Fa在转子磁极轴线上的投影,其最大值为
14
无刷直流电机的基本控制技术
F = Fasin adm
式中 Ea、Eb、Ec———A、B、C三相绕组的反电动势;
ia、ib、ic———A、B、C三相绕组的电流;
Ω——转子的机械角速度。 可见,电磁转矩取决于反电动势的大小。在一定的转 速下,如果电流一定,反电动势越大,转矩越大。
10
无刷直流电机的基本控制技术 三相绕组的反电动势波形及其导通规律
ea VT1 VT4 eb VT3 VT6 VT6 VT3 VT6 ωt VT1 VT4 ωt
6
无刷直流电机的基本控制技术
无刷直流电机基本工作原理
转子每转过60o,逆变器开关管换流一次、定子磁状 态改变一次,电机有6个磁状态,三相各导通120o。 转子磁场顺时针连续旋转、定子磁场隔60O跳跃旋转。
7
无刷直流电机的基本控制技术
三相六状态时绕组和开关管导通顺序表
8
无刷直流电机的基本控制技术
D V4 V4 T
V6 T
V6 V2 D T
V2 D
C
B
星形联结三相桥式主电路
5
无刷直流电机的基本控制技术
无刷直流电机基本工作原理
控制电路对转子位置传感器检测的信号进行逻辑变换 后产生脉宽调制PWM信号,经过驱动电路放大送至逆 变器各功率开关管,从而控制电动机各相绕组按一定 顺序工作,在电机气隙中产生跳跃式旋转磁场。
电机反电动势波形
21
第二部分 E-BIKE综述
22
E-BIKE综述
E-BIKE基本构成
控制器 充电器 电机 电池
+
23
E-BIKE综述
市场概况
24
第三部分 120度控制与180度控制性能比较
25
120度控制模式下的性能分析
120度模式下的PWM调制类型__上桥臂PWM
下桥臂ON
全 OFF
上桥臂 PWM
V4 T + V6 T V2 T C
+ V1 T U S U S C V4 T 31
V3 T
V5 T
A
B
V1 T
V3 T
V5 T
A
B
V4 T
V6 T
V2 T
V6 T
V2 T
C
120度控制模式下的性能分析
产生转矩脉动的原因分析__磁场旋转
A
A
Y
Y Fad S N Fa q Fa C X II B Fr I Z
180度控制方式下的性能测试
59
38
180度控制模式的关键技术分析
空间电压矢量调制技术
39
180度控制模式的关键技术分析
空间电压矢量调制技术
40
180度控制模式的关键技术分析
空间电压矢量调制技术__三相调制下的PWM
41
180度控制模式的关键技术分析
空间电压矢量调制技术__两相调制下的PWM
42
180度控制模式的关键技术分析
无刷直流电动机转子位置信号的检测-霍尔元件
霍尔器件以霍尔效应为其工作基础,是一种磁传感器。可以检 测磁场及其变化,可在各种与磁场有关的场合中使用。霍尔传 感器主要有两大类,一类为开关型器件,一类为线性霍尔器件。 开关型器件
17
无刷直流电机的基本控制技术
无刷直流电动机转子位置信号的检测-霍尔元件
Hall IC
ec VT5 VT2 VT2 VT5 ωt
0 30
90
150
210 270 330 390
450
510
570 63电机的基本控制技术 无刷直流电机的运行特性分析
机械特性曲线
调节特性
12
无刷直流电机的基本控制技术
无刷直流电机的电枢反应
电动机负载时电枢绕组产生的磁场对主磁场的影响称为 电枢反应。 电枢绕组的合成磁动势变化如下图所示
180度正弦波控制E-BIKE 技术介绍
NEC Electronics China Group
Inverter Motor Marketing 2009.11
1
第一部分 无刷直流电机的基本控制技术
2
无刷直流电机的基本控制技术
无刷直流电机控制系统的基本构成
直 电源 流
逆器 变
电本 机体
输出
位检器 置测 控信 制号 控器 制
Z S
Fa Faq