CR6842_45应用指导V1.2
RC-532 4[1].0版使用说明书
![RC-532 4[1].0版使用说明书](https://img.taocdn.com/s3/m/54958b42852458fb770b5648.png)
固定式二维条码读取器RC532-4.0使用说明书版权所有1郑重声明RC532读取器已在中国专利局和商标局注册。
本说明使用的商标、商号及图标均属于北京意锐新创科技有限公司或其授权人,并受中华人民共和国法律及国际条约保护。
本说明书仅适用于书中所介绍的RC532读取器产品的使用和使用条件及环境要求的说明。
本说明书的资料的正确性已经被认真审核,但北京意锐新创科技有限公司对内容的解释有保留权。
本说明书的所有权属于北京意锐新创科技有限公司。
本说明书未经北京意锐新创科技有限公司明确的书面许可,任何人不得作为任何其它的目的、以任何的形式或手段使用、复制或传播本说明书的其他部分。
本说明书的内容,如有变动,恕不另行通知。
如果您对本说明书未提出书面异议,则表明您接受了上述的条件。
2安全警告使用读取器时:•请勿把设备窗口对准在直射日光及高温物体的附近。
•请勿设置在高温多湿的地方,及冷藏库等温度过低的地方,以避免读取器的电路、光学元件发生故障。
•请勿设置在会碰到水的地方,以避免出现故障。
•请勿在会产生电磁辐射的区域附近进行操作,避免影响读取器的正确识读。
•请勿将读取器跌落或振动•请勿随意拆卸。
•请勿连接不适当的配件。
3专有名词定义专业术语提醒:•RC532------条码读取器•CV-Star RC532------条码读取器的应用程序•LED------照明灯•LCD------液晶屏幕•QR码识别模式------指识读器读取QR码•汉信码识别模式------指识读器读取汉信码注意:主要是提示操作者的使用方式,节约设备学习时间,提高工作效率。
警告:主要告诉使用的正确操作,以免发生设备损坏和人员的身体伤害。
注意•本手册版权属于北京意锐新创科技有限公司所有•随机所附赠软件之版权均属于本公司所有•本手册所涉及的其它商标均属于本公司之注册商标•本公司保留对产品和手册之修改权利,恕不另行通知4目录目录 (5)1引言 (6)2 RC532介绍 (7)2.1 RC532读取器 (7)2.2 RC532读取器特点 (8)2.3 RC532参数 (9)3RC532的安装与卸载 (9)3.1 RC532程序安装 (10)3.2 程序的启动 (13)3.3 程序的卸载 (14)4RC532产品使用说明 (16)5 售后服务 (18)附件: (19)FAQ (19)设备工作环境 (19)51引言RC532产品是由北京意锐新创科技有限公司自主研发的固定式二维条码读取器,突破以往读取器的工作模式,合理的使数据采集和识别工作分离,有利的降低了应用成本,为第三方集成商提供极大的便利,为更多的应用提供了解决方案。
45系列制动传感器产品数据手册说明书

Technical DataFork SensorsCatalog Numbers 45LSP-2LNA1-P3, 45LSP-2LPA1-P3, 45LSP-2LNA2-P3, 45LSP-2LPA2-P3, 45LSP-2LNA3-P3, 45LSP-2LPA3-P3, 45LSP-2LNA4-P3, 45LSP-2LPA4-P3, 45LST-1LEA1-P4, 45LST-1LEA2-P4, 45LST-1LEA3-P4, 45LST-1LEA4-P4, 45LST-1LEA5-P4, 45LST-1LEA6-P4, 45LST-1LEA7-P4Plastic Fork SensorsFeaturesThe 45LSP plastic fork sensors include the following features:•Detection of objects as small as 0.2 mm (0.08 in.)•Highly visible power and output LED indicators with output indication along both sides of the fork •Remote teach and teach button lock on 4-pin models•Selectable light or dark operate•Multiple mounting options: through-holes, threaded holes, and dovetail•Easy installation with no alignment required •IP67 rated enclosureTopicPagePlastic Fork Sensors 1Features 1Product Selection 2User Interface Panel 2Wiring Diagrams 2Approximate Dimensions3Optical and Response Time Characteristics 3Metal Fork Sensors 4Features 4Product Selection 4User Interface Panel 4Wiring Diagrams 4Dimensions5Optical and Response Time Characteristics 5Specifications6Fork SensorsTable 1 - Product Selection(1)Connection Options: The -P3 suffix describes a 3-pin pico (M8) integral QD. For additional connection options, replace the -P3 suffix with -P4: For a 4-pin pico (M8) integral QD connection (for example, 45LSP-2LPA1-P4). Table 2 - User Interface PanelWiring Diagrams* R emote teach2Rockwell Automation Publication FORK-TD001A-EN-P - May 2018Rockwell Automation Publication FORK-TD001A-EN-P - May 20183Fork SensorsApproximate Dimensions[mm (in.)]Optical and Response Time CharacteristicsGap Size (mm)A B C D E F G 3030 (1.18)50 (1.97)30 (1.18)34 (1.34)59.5 (2.34)20 (0.79)—5050 (1.97)70 (2.76)50 (1.97)54 (2.13)79.5 (3.13)20 (0.79)28 (1.10)8080 (3.15)100 (3.93)80 (3.15)54 (2.13)79.5 (3.13)20 (0.79) 2 x 28120120 (4.72)140 (5.51)120 (4.72)54 (2.13)79.5 (3.13)20 (0.79)3 x 28Characteristic 45LSP Plastic Fork 30 mm50 mm 80 mm 120 mm Resolution 0.2 mm (0.008 in.)0.4 mm (0.016 in.)Light Source Visible red LED 640 nmResponse Time0.25 ms4Rockwell Automation Publication FORK-TD001A-EN-P - May 2018Fork SensorsMetal Fork SensorsFeaturesThe 45LST Metal Fork Sensors include the following features:•Multi-turn sensitivity adjustment allows for high-precision adjustment •Fast 30 µs response time for selected models•NPN or PNP push-pull output helps streamline product inventory •Industrial aluminum housing •IP65 rated enclosureTable 3 - Product SelectionTable 4 - User Interface PanelWiring Diagrams*White wire not used.Rockwell Automation Publication FORK-TD001A-EN-P - May 20185Fork SensorsDimensions[mm (in.)]Optical and Response Time CharacteristicsAccessoriesA (Fork Size)BCD 2 (0.08)40 (1.57)14 (0.55) 6.25 (0.25)15 (0.59)40 (1.57)27 (1.06) 6.25 (0.25)30 (1.18)40 (1.57)42 (1.65) 6.25 (0.25)50 (1.97)57 (2.24)40 (1.57)17.25 (0.68)80 (3.15)57 (2.24)70 (2.75)17.25 (0.68)120 (4.72)57 (2.24)110 (4.33)17.25 (0.68)225 (8.86)60 (2.36)——Characteristic 45LST Metal Fork [mm (in.)]2 mm 15, 30, 50, 120, and 225 mm Resolution ——Light Source Infrared non-modulatedResponse Time0.03 ms 1 msDescriptionCatalog Number Pico style QD cordset, 3-pin889P-F3AB-2Dovetail Bracket used for Background and Foreground Suppression Sensors 44B44B-BKT6Rockwell Automation Publication FORK-TD001A-EN-P - May 2018Fork SensorsSpecificationsAdditional ResourcesThese documents contain additional information concerning related products from Rockwell Automation.Y ou can view or download publications at /global/literature-library/overview.page . T o order paper copies of technical documentation, contact your local Allen-Bradley distributor or Rockwell Automation sales representative.Attribute45LSP Plastic Fork 45LST Metal ForkCertifications c-UL-us Listed and CE Marked for all applicable directivesVibration 10…55 Hz, 1 mm (0.04 in.) amplitude, meets or exceeds IEC|600947-5-2Shock 30 g with 1 ms pulse duration, meets or exceeds IEC 600947-5-2 Environmental Enclosure type rating IP67IP65Operating temperature -10…+60 °C (14…140 °F)-20…+60 °C (-4…+140 °F)User Interface Sensitivity adjustment Push button 25-turn potentiometer Indicator LEDs Green and orange LEDs Green and red LEDsElectrical Operating voltage 10…30V DC Current consumption 30 mA40 mA maxProtection type Short circuit, reverse polarity, false pulse, overload Outputs Response time 0.25 ms1 ms, 0.03 ms (45LST-1LEA1-P4)Output type (1)(1)For Output Type and Connection Type, see Product Selection .Push-pull output (NPN or PNP)Output function Selectable light or dark operate Load current 100 mA Leakage current 0.5 mA max—Mechanical Housing material PolycarbonateAnodized aluminum Connection type(1)4-pin pico (M8) integral QDResourceDescriptionIndustrial Automation Wiring and Grounding Guidelines, publication 1770-4.1Provides general guidelines for installing a Rockwell Automation industrial system.Product Certifications website, /global/certification/overview.pageProvides declarations of conformity, certificates, and other certification details.Fork Sensors Notes:Rockwell Automation Publication FORK-TD001A-EN-P - May 20187Allen-Bradley, Rockwell Software, Rockwell Automation, and LISTEN. THINK. SOLVE are trademarks of Rockwell Automation, Inc.Trademarks not belonging to Rockwell Automation are property of their respective companies.Publication FORK-TD001A-EN-P - May 2018Copyright © 2018 Rockwell Automation, Inc. All rights reserved. Printed in the U.S.A.Rockwell Automation SupportUse the following resources to access support information.Documentation FeedbackY our comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete theHow Are W e Doing? form at /idc/groups/literature/documents/du/ra-du002_-en-e.pdf .Technical Support Center Knowledgebase Articles, How-to Videos, FAQs, Chat, User Forums, and Product Notification Updates./knowledgebaseLocal Technical Support Phone Numbers Locate the phone number for your country./global/support/get-support-now.pageDirect Dial Codes Find the Direct Dial Code for your product. Use the code to route your call directly to a technical support /global/support/direct-dial.page Literature Library Installation Instructions, Manuals, Brochures, and Technical Data./literatureProduct Compatibility and Download Center(PCDC)Get help determining how products interact, check features and capabilities, and find associated /global/support/pcdc.pageRockwell Otomasyon Ticaret A.Ş., Kar Plaza İş Merkezi E Blok Kat:6 34752 İçerenköy, İstanbul, T el: +90 (216) 5698400Rockwell Automation maintains current product environmental information on its website at /rockwellautomation/about-us/sustainability-ethics/product-environmental-compliance.page .Rockwell Automation SupportUse the following resources to access support information.Documentation FeedbackY our comments will help us serve your documentation needs better. If you have any suggestions on how to improve this document, complete the How Are W e Doing? form at /idc/groups/literature/documents/du/ra-du002_-en-e.pdf .Technical Support Center Knowledgebase Articles, How-to Videos, FAQs, Chat, User Forums, and Product Notification /knowledgebaseLocal Technical Support Phone Numbers Locate the phone number for your /global/support/get-support-now.page Direct Dial Codes Find the Direct Dial Code for your product. Use the code to route your call directly to a technical support /global/support/direct-dial.page Literature Library Installation Instructions, Manuals, Brochures, andTechnical /literature Product Compatibility and Download Center(PCDC)Get help determining how products interact, check features and capabilities, and find associated firmware./global/support/pcdc.pageWaste Electrical and Electronic Equipment (WEEE)At the end of life, this equipment can be collected separately from any unsorted municipal waste.。
263系列金属螺杆尖耐抗电尖耐抗电尖通螺杆类型环形编码器说明书
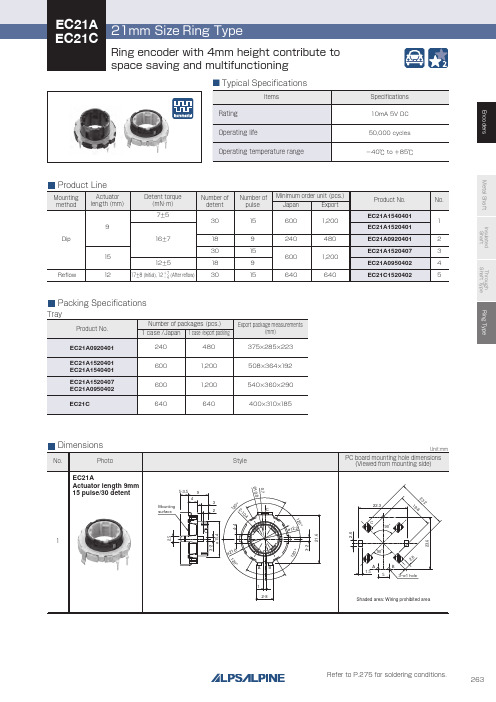
Through shaft type
Horizontal
Horizontal
—
12/12
12/24 12/12
9/18 15/30
Ring type
— 15/30
Features
W
Dimensions (mm)
D
H
Operating temperature range
Operating life Automotive use Life cycle (availability)
300V AC for 1minute or 360V AC for 2s
300V AC for 1minute or 360V AC for 1s
—
7±5mN・m 12±5mN・m 16±7mN・m
—
17±8mN・m(Initial) 12+− 74mN・m(After reflow)
100N
Shaft configuration
1
Style
5-3.5 9
4 Mounting surface
3 2
120°
ø21.6
C ø12.2
AB 1
2-8
120°
0.7
2-10.4 120°
Unit:mm
PC board mounting hole dimensions (Viewed from mounting side)
22.3
3
˃˃
˃ $ ˃ $
˃˃
"# "#
EC21A Actuator length 15mm 9 pulse/18 detent
PCS-9662辅助装置技术说明书(20141202)
南京南瑞继保电气有限公司
iii
PCS-9662 辅助装置
目录
前言 .......................................................................................................................................i 目录 .....................................................................................................................................iv 第 1 章 概述........................................................................................................................1
危险!
意味着如果安全预防措施被忽视,则会导致人员死亡, 严重的人身伤害,或严重的设备 损坏。
警告!
意味着如果安全预防措施被忽视,则可能导致人员死亡, 严重的人身伤害,或严重的设 备损坏。
警示!
意味着如果安全预防措施被忽视,则可能导致轻微的人身伤害或设备损坏。本条特别适 用于对装置的损坏及可能对被保护设备的损坏。
2.1.1 直流电源.......................................................................................................3 2.2 机械结构 .................................................................................................................3 2.3 环境条件参数..........................................................................................................3 2.4 型式试验 .................................................................................................................3
四通道AD采样四通道DA回放信号处理板MFSS6842硬件说明书

2
上海宇志通信技术有限公司
目录
第一部分 硬件资源配置 .................................... 2 第二部分 各功能模块硬件连接关系 .......................... 4
一、电源部分 .......................................... 4 二、DSP(TMS320C6713)部分 ............................ 5 三、FPGA(EP2S90F1020I4)部分 ........................ 17 四、两路 IDE 磁盘阵列存储接口 ......................... 17 五、两片 SDRAM(MT48LC4M32B2)部分 ................... 22 六、两片 SRAM(IS61LV25616)部分 ..................... 27 七、USB2.0(CY7C68013)接口部分 ...................... 28 八、四通道 AD 采样部分 ................................ 29 九、四通道 DA 回放部分 ................................ 30 十、时钟管理部分 ..................................... 31 十一、RS232 电路(UART) ............................... 32 十二、RS422 电路 ..................................... 33 十三、RTC 实时时钟电路 ............................... 33
RoboClaw ST 2x45A 双通道驱动型电机控制器数据表说明书

RoboClaw ST 2x45A, 34VDC Dual Channel Brushed DC Motor ControllerData Sheet Version 2.3Feature Overview:• 45 Amps Continuous Per Channel• 60 Amps Peak Per Channel• Screw Terminal Inputs• Channel Bridging Supported• Dual Quadrature Decoding• 9.8 million PPS Decoding• Multimode Interface• TTL Serial• USB Port• Analog Interface• R/C Input Control• Limit, Home and E-Stops• Up to 34VDC Operation• Cooling Fan With Automatic Control• 3.3v Compliant Control Outputs• 5v Tolerant Control Inputs• Programmable Current Limiting• Programmable Voltage Clamping• Closed and Open Loop Operation• Auto Tuning PID Feature• Mixed Control Modes• Data Logging• Diagnostic LEDs• Field Firmware Updates• Regulated 5VDC, 3A User Available Output• Over Voltage and Under Voltage Protection• Easy Tuning, Monitor and Setup with PC utilityDevice OverviewThe RoboClaw is an intelligent, high performance motor controller designed to control dual brushed DC motors. It can be controlled from USB, RC radio, PWM, TTL serial, analog and microcontrollers such as an Arduino or Raspberry Pi.RoboClaw automatically supports 3.3V or 5V logic levels, travel limit switches, home switches, emergency stop switches, power supplies, braking systems and contactors. A built-in switching mode BEC supplies 5VDC at up to 3 Amps for powering user devices. In addition power supplies can be utilized by enabling the built in voltage clamping control feature.A wide variety of feedback sensors are supported. This includes quadrature encoders, potentiometers and absoluteencoders which can be easily configured using the available auto tune function. With sensors, two brushed DCmotors can be controlled in closed loop mode allowing precise control over position and speed. With the ability to use potentiometers, servo systems can be created and controlled from any of RoboClaw’s interface modes.For greater control, built-in commands are available for controlling acceleration, deceleration, distance, speed, current sense, voltage limits and more. In addition, RC and analog modes can be configured by user defined settings to control acceleration and deceleration rates.RoboClaw incorporates multiple protection features including temperature, current, over voltage and under voltage limits.The protection features are self monitoring and protect RoboClaw from damage in any operating condition. User definable settings such as maximum current limit, maximum and minimum battery voltages are provided for more refined control.RoboClaw’s regenerative capabilities will charge a supply battery during slow down or breaking. It’s advance circuitry can change direction during full throttle without damage! RoboClaw also incorporates a LiPo cutoff mode to prevent battery damage.Multimode InterfaceRoboClaw’s I/O are voltage protected and can handle up to 5VDC. The I/O only output a high of 3.3V. This allows RoboClaw to be interfaced to 5V or 3V logic easily with no translation circuits required. RoboClaw can be connected directly to a Raspberry Pi or Arduino. All of RoboClaw’s inputs are internally pulled-up to prevent false triggers. Inputs can also be configured using the Motion Studio application.User Regulated Power OutputRoboClaw provides regulated power (BEC) for user devices. A high efficiency switching regulator supplies 5VDC at up to3 Amps. This voltage can be used to power external sensors, encoders, MCUs and other electronics. The regulated userpower is automatically current limited and thermally protected.Main BatteryThe peak operational input voltage depending on the model can be up to 34VDC, 60VDC or 80VDC. The modelsmaximum input voltage can not be exceeded. If the maximum voltage is exceed the motors will be disabled. Fully charged batteries maximum voltage must be taken into account when in use. RoboClaw is a regenerative motor controller. During regeneration, voltages can peak over the maximum rated voltage in which RoboClaw is designed to handle these over voltage spikes by braking the motors.Logic BatteryRoboClaw accepts a logic battery. The logic battery is also known as a backup battery. The user regulated power output (BEC) is by default powered from the main battery, unless a logic battery is detected. The logic battery source is coupled to the main battery through an on board automatic switch. If the main battery voltage drops below the logic battery input level, the logic circuit and user regulated power output will be drawn from the logic battery.SoftwareRoboClaw can be easily configured using the Motion Studio software tool. The Windows based application enables users to quickly configure RoboClaw. The software can be used during run time to monitor and control several operational parameters. Motion studio is available from the website. It can also be found in the Downloads section of the Basicmicro website or listed under the Download tabs on the production page.User ManualThis data sheet only covers model specific information and basic wiring. To properly setup and use RoboClaw refer to the RoboClaw User Manual available for download from .CoolingRoboClaw will generate heat. The maximum current ratings can only be achieved and maintained with adequate heat dissipation. The motor controller should be mounted so that sufficient airflow is provided. Which will dissipate the heat away from the motor controller during operation. Some models of RoboClaw include a built-in automatic cooling fan controller, which can be used to help maintain continuous currents under extreme conditions.Emergency StopThe motor controller should be wired using an external contactor, relay or high amperage mechanical switch to control the main power input. A second power source should be used to power the logic section in situations where the main power will be under heavy load. Voltage drops can occur from constant full load or high speed direction changes. Voltage drop can cause logic brown outs if only a main battery is used without a logic battery.USBThe motor controllers USB port should be used for configuration and debugging. The USB protocol is not designed for electrically noisy environments. The USB port will likely disconnect and not automatically recover during operation in electrically noisy environments. To recover from a dropped USB port, the motor controllers USB cable may require being unplugged and re-plugged in. The TTL serial control should be the preferred method of control in electrically noisy environments.Firmware UpdatesFirmware updates will be made available to add new features or resolve any technical issue. Before using RoboClaw for the first time it is recommended to update to the latest firmware. Download and install Motion Studio. Refer to the RoboClaw User Manual or Application Notes for additional information on updating the RoboClaw firmware.Hardware Overview:Control InterfaceThe RoboClaw ST uses standard screw terminals (2.54mm) spacing. The table below list the pins and their respectivefunctions. All pins are 5V tolerant and output 3.3V for compatibility with processor such as Raspberry Pi and Arduino. R/C pulse input, Analog and TTL can be generated from any microcontroller such as a Arduino or Raspberry Pi. The R/C Pulse input pins can also be driven by any standard R/C radio receiver . There are several user configurable options available. Toconfigure RoboClaw, install Motion Studio and connect it to an available USB port.Logic Battery (LB IN)The logic circuit of RoboClaw can be powered from a secondary battery wired to LB IN. A logic battery will prevent brownouts when the main battery is low or under heavy load. The positive (+) terminal is located at the board edge and ground (-) is the inside pin closest to the heatsink.Encoder Inputs (1A / 1B / 2A / 2B)The encoders inputs are labeled 1B, 1A, 2B and 2A. 1B and 1A are the inputs for encoder 1. 2B and 2A are the inputs for encoder 2 which also correspond to motor channel 1 and motor channel 2. Quadrature encoder inputs are typically labeled 1A, 1B, 2A and 2B. Quadrature encoders are directional. When connecting encoders make sure the leading channel for the direction of rotation is connected to A. If one encoder is backwards to the other you will have one internal counter counting up and the other counting down. Use Motion Studio to determine the encoders direction relative to the motors rotation. Encoder channels A and B can be swapped in software using Motion Studio to avoid re-wiring the encoder or motor.Control Inputs (S1 / S2 / S3 / S4 /S5)S1, S2, S3, S4 and S5 are configured for standard servo style headers I/O (except on ST models), +5V and GND. S1 and S2 are the control inputs for serial, analog and RC modes. S3 can be used as a flip switch input, when in RC or Analog modes. In serial mode S3, S4 and S5 can be used as emergency stops inputs or as voltage clamping control outputs.When configured as E-Stop inputs, they are active when pulled low. All I/O have internal pull-ups to prevent accidental triggers when left floating. S4 and S5 can be configured as home switch and limit switch inputs. The pins closest to the board edge are the I/0s, center pin is the +5V and the inside pins are ground. Some RC receivers have their own supply and will conflict with the RoboClaw’s 5v logic supply. It may be necessary to remove the +5V pin from the RC receivers cable in those situations.Cooling Fan ControlThe cooling fan control will automatically turn on and off a fan based on RoboClaws temperature. The fan will turn on when the board temperature reaches 45°C and will automatically turn off when the board temperature falls below 35°C.The fan control circuit can power a 5VDC fan at up to 230mA. A wide range of fans can be used. The CFM rating of the fan will determine how effective the fan is at cooling. A tested fan is available from DigiKey under part number:259-1577-ND. However any fan can be used provided it meets the electrical specifications outlined above.Main Battery Screw TerminalsThe main power input can be from 6VDC to 34VDC on a standard RoboClaw and 10.5VDC to 60VDC or 80VDC on an HV (High Voltage) RoboClaw. The connections are marked + and - on the main screw terminal. The plus (+) symbol marks the positive terminal and the negative (-) marks the negative terminal. The main battery wires should be as short as possible.Do not reverse main battery wires or damage will occur.DisconnectThe main battery should include a quick disconnect in case of a run away situation and power needs to be cut. The switch must be rated to handle the maximum current and voltage from the battery. Total current will vary depending on the type of motors used. A common solution would be an inexpensive contactor which can be sourced from sites like Ebay.A power diode rated for approximately 2 to 10 Amps should be placed across the switch/contactor to provide a return tothe battery when power is disconnected. The diode will provide the regenerative power a place to go even if the switch is open.Motor Screw TerminalsThe motor screw terminals are marked with M1A / M1B for channel 1 and M2A / M2B for channel 2. For a typical differential drive robot the wiring of one motor should be reversed from the other. The motor and battery wires should be as short as possible. Long wires can increase the inductance and therefore increase potentially harmful voltage spikes.Control ModesRoboClaw has 4 main functional control modes explained below. Each mode has several configuration options. The modes can be configured using Motion Studio or the built-in buttons. Refer to the RoboClaw User Manual for installation and setup instructions.RCUsing RC mode RoboClaw can be controlled from any hobby RC radio system. RC input mode also allows low powered microcontrollers such as a Basic Stamp to control RoboClaw. Servo pulse inputs are used to control the direction and speed. Very similar to how a regular servo is controlled. Encoders are supported in RC mode, refer to the RoboClaw user manual for setup instructions.AnalogAnalog mode uses an analog signal from 0V to 2V to control the speed and direction of each motor. RoboClaw can be controlled using a potentiometer or filtered PWM from a microcontroller. Analog mode is ideal for interfacing RoboClaw with joystick positioning systems or other non microcontroller interfacing hardware. Encoders are supported in Analog mode, refer to the RoboClaw user manual for setup instructions.Simple SerialIn simple serial mode RoboClaw expects TTL level RS-232 serial data to control direction and speed of each motor.Simple serial is typically used to control RoboClaw from a microcontroller or PC. If using a PC, a MAX232 or an equivalent level converter circuit must be used since RoboClaw only works with TTL level inputs. Simple serial includes a slave select mode which allows multiple RoboClaws to be controlled from a signal RS-232 port (PC or microcontroller). Simple serial is a one way format, RoboClaw can only receive data. Encoders are not supported in Simple Serial mode.Packet SerialIn packet serial mode RoboClaw expects TTL level RS-232 serial data to control direction and speed of each motor. Packet serial is typically used to control RoboClaw from a microcontroller or PC. If using a PC a MAX232 or an equivalent level converter circuit must be used since RoboClaw only works with TTL level input. In packet serial mode each RoboClaw is assigned a unique address. There are 8 addresses available. This means up to 8 RoboClaws can be on the same serial port. Encoders are supported in Packet Serial mode, refer to the RoboClaw user manual for setup instructions.USB ControlUSB can be used in any mode. When RoboClaw is in packet serial mode and another device, such as an Arduino, is connected commands from the USB and Arduino will be executed and can potentially override one another. However if RoboClaw is not in packet serial mode, motor movement commands will be overiden by Analog or RC pulse input. USB packet serial commands can then only be used to read status information and set configuration settings.There are several wiring configurations for RoboClaw. Each configuration will have unique wiring requirements to ensure safe and reliable operation. The diagram below illustrates a very basic wiring configuration used in a small motor system where safety concerns are minimal. This is the most basic wiring configuration possible. All uses of RoboClaw should include some kind of main battery shut off switch, even when safety concerns are minimal. Never underestimate a system with movement when an uncontrolled situation arises.In addition, RoboClaw is a regenerative motor controller. If the motors are moved when the system is off, it could cause potential erratic behavior due to the regenerative voltages powering the system. The regenerative voltages can cause problems if a power supply is used for main power. A voltage clamping circuit is recommended to dump the excessive voltages. See the RoboClaw user manual or Application Notes for voltage clamping setup and wiring diagrams.R/C ModeThe below wiring diagram is very basic and for use with R/C mode. R/C mode can be used when pairing RoboClaw with a standard R/C receiver. R/C mode can also be used with a microcontroller and using servo pulses to control RoboClaw. The RoboClaw supplies power to the R/C system. If the R/C receiver used, has its own power the 5V pin on the 3 pin header must be remove otherwise it will interfere with RoboClaw’s BEC.In all system with movement, safety is a concern. This concern is amplified when dealing with higher voltages. The wiring diagram below illustrates a properly wired system. An external main power cut off is required (SW1). The external cut off can consist of a high amperage mechanical switch or a contactor.When the RoboClaw is switched off or a fuse is blown, a high current diode (D1) is required to create a return path to the battery for potential regenerative voltages. In addition a pre-charge resistor (R1) is required to reduce the high inrush currents to charge the on board capacitors. A pre-charge resistor (R1) should be around 1K, 1/2Watt for a 60VDC motor controller which will give a pre-charge time of about 15 seconds. A lower resistances can be used with lower voltages to decrease the pre-charge time.Closed Loop ModeA wide range of sensors are supported for closed loop operation. RoboClaw supports dual quadrature encoders (up to9.8 million PPS), absolute encoders, potentiometers and hall effect sensors. The wiring diagram below is an exampleof closed loop mode using quadrature encoders. Quadrature encoders are directional. RoboClaw’s internal counters will increment for clockwise rotation (CW) and decrement for counter clockwise rotation (CCW). When wiring encoders A andB channels it is important they are wired to match the direction of the motor. If the encoder is wired in reverse it cancause a run away condition. All motor and encoder combinations will need to be tuned (see the RoboClaw user manual).Logic BatteryAn optional logic battery is supported. Under heavy loads the main power can suffer voltage drops, causing potential logic brown outs which may result in uncontrolled behavior . A separate power source for the motor controllers logic circuit, will remedy potential problems from main power voltage drops. The logic battery maximum input voltage is34VDC with a minimum input voltage of 6VDC. The 5V regulated user output is supplied by the secondary logic battery if supplied. The mAh of the logic battery should be determined based on the load of attached devices powered by the regulated 5V user output.R1D1Bridging ChannelsRoboClaws dual channels can be bridge to run as one channel, effectively doubling its current capability for one motor.Damage will result if RoboClaw is not set to bridged channel mode before wiring. Download and install Motion Studio.Connect the motor controller to the computer using an available USB port. Run Motion Studio and in general settings check the option to combine channels. Then click “Write Settings” in the device menu. When operating in bridged mode the total peak current output is combined from both channels. Each channel will indicate the amount of current being drawn for that channel. The peak current run time is dependant on heat build up. Adequate cooling must be maintained.For more information see the RoboClaw user manual.Bridged Channel WiringWhen bridged channel mode is active the internal driver scheme for the output stage is modified. The output leads must be wired correctly or damage will result. One side of the motor is connected to M1A and M2B. The other side of the motor is then connected to M1B and to M2A.DimensionsNotes:1. Peak current is automatically reduced to the typical current limit as temperature approaches 85°C.2. Current is limited by maximum temperature. Starting at 85°C, the current limit is reduced on a slope with a maximumtemperature of 100°C, which will reduce the current to 0 amps. Current ratings are based on ambient temperature of 25°C.3. RS232 format is 8Bit, No Parity and 1 Stop bit.4. Condensing humidity will damage the motor controller.WarrantyBasicmicro warranties its products against defects in material and workmanship for a period of 1 year. If a defect is discovered, Basicmicro will, at our sole discretion, repair, replace, or refund the purchase price of the product in question.*******************************.Noreturnswillbeacceptedwithouttheproperauthorization.Copyrights and TrademarksCopyright© 2015 by Basicmicro, Inc. All rights reserved. All referenced trademarks mentioned are registered trademarks of their respective holders.DisclaimerBasicmicro cannot be held responsible for any incidental or consequential damages resulting from use of products manufactured or sold by Basicmicro or its distributors. No products from Basicmicro should be used in any medical devices and/or medical situations. No product should be used in any life support situations.ContactsEmail:********************Techsupport:**********************Web: Discussion ListA web based discussion board is maintained at Technical Support*******************************************************************,byopeningasupportticketontheIon Motion Control website or by calling 800-535-9161 during normal operating hours. All email will be answered within 48 hours.。
纳雷科技 CAR28T 毫米波雷达 应用手册说明书
CAR28T毫米波雷达应用手册湖南纳雷科技有限公司免责声明欢迎您选购本产品。
纳雷科技公司官网有CAR28T的专题网页,您可以通过该页面获得最新的产品信息及应用手册。
应用手册如有更新,恕不另行通知。
任何用户在使用本产品前,请仔细阅读本声明。
一旦使用,即被视为对本声明内容的认可和接受。
请严格遵守手册安装与使用该产品。
如有不正当的使用,而造成的损害或损伤,纳雷科技不承担相应的损失及赔偿责任。
本产品为纳雷科技版权所有。
未经许可,不得以任何形式复制翻印。
使用本产品及手册不会追究专利责任。
版本历史日期版本版本描述2017-05-15 2.0CAR28T应用手册第二版本2017-11-02 2.1修改安装示意图目录1CAR28T简介 (1)2产品使用注意事项 (1)3发货清单 (2)4快速使用指南 (2)4.1连接线安装 (2)4.2CAR28T安装及坐标系统 (3)4.3测试使用 (3)4.4修改雷达ID (9)4.5产品在线固件升级 (12)5CAN口数据解析 (12)5.1CAR28T配置(Sensor Configuration) (13)5.2雷达返回(Sensor Feedback) (16)5.3雷达状态信息(Radar Status) (17)5.4目标输出状态(Target Status) (18)5.5目标输出信息(Target Info) (19)6数据解析示例 (20)7安装及风险须知 (21)7.1安装原则 (21)7.2使用风险须知 (22)8常见问题(FAQ) (22)9参考文献 (23)1CAR28T简介CAR28T是业界一款轻巧的24GHz车载毫米波雷达传感器,利用发射的无线电波与接收回波差准确的测量目标距离、速度、角度等信息。
CAR28T体型小巧(96×58×24mm)、测量距离远(30米)、性能领先、性价比高、集成的外设接口(CAN接口),具有BSD/LCA功能,可以满足急剧增长的汽车工业安全辅助驾驶需求。
内窥镜摄像系统使用(技术)说明书

目录1.产品组成及预期用途 (1)2.用户须知 (1)3.安全指南 (1)4.产品描述 (2)4.1 型号 (2)4.2 板功能描述 (2)4.3内外标记及简写说明 (3)4.4技术参数 (4)4.5电磁兼容 (4)4.6视频连接的B N C、D-V ID E O模式连接 (7)5.设备的使用 (8)6.禁忌症 (8)7.设备维护与保养 (8)8.主要故障现象及原因与排除方法 (9)9.推荐使用的消毒方法 (9)10.注意事项 (9)11.运输、使用环境 (10)12.生产日期 (11)13.使用期限 (11)14.售后服务 (11)内窥镜摄像系统使用(技术)说明书1、产品组成及预期用途内窥镜摄像系统由控制主机、摄像头、光学适配器组成。
供医院临床做内窥镜手术时,将体内手术区域视频放大成像用。
控制主机含图像处理软件,其完整版本为SD1.1.1.1,发布版本为SD1。
2、用户须知2.1使用人员应具备相应专业知识和技能,充分了解内窥镜摄像系统的使用方法及术中可能出现的各种非正常情况的应急处理。
2.2产品的电路图、元器件清单在委托第三方进行注册检验时已作为技术资料的一部分予以提供验证。
本公司声明,作为供应者,可将按顾客要求提供电路图、元器件清单、图注、校准细则,设备内部无可修理的部件,请勿非预期使用技术资料。
2.3只有本公司的技术人员或经本公司特别授权的技术人员才能对本设备进行技术服务,任何未经授权的人员对本设备的维修和处理将导致保修的终止,本公司将不承担任何责任。
2.4本产品基于新技术的改进,将不再另作声明。
3、安全指南3.1设备使用要求3.1.1依据医疗设备使用要求,医疗设备只能按照所符合的法律法规进行安装、操作和使用,符合所认可的工程学原理及劳动和意外保护法规。
3.1.2只有那些经过培训或其知识与实践经验足以保证其可以正确操作的人员,才能操作和使用该设备。
3.1.3只有那些已读过本说明书,知道正确使用该设备的人员才能操作,只有具有一定理论知识和实践经验的合适的人员才有资格操作。
KSC12 说明书V1.0

用户须妥善保存好该手册,以备以后使用。
i
阅读指南
〖手册目标〗 本手册主要对安全注意事项、开关磁阻电机及控制器的原理、安装、调试、参数设定及维护等内容进行
§1.5.1 产品标识..............................................................................................................1-2 §1.5.2 应用范围..............................................................................................................1-2 §1.6 使用条件 ...........................................................................................................................1-2 §1.6.1 正常使用条件 ......................................................................................................1-2 §1.6.2 特殊使用条件 ......................................................................................................1-3 §1.6.3 工作条件..............................................................................................................1-3 §1.6.4 法定规章..............................................................................................................1-3
FLUKE123/124 使用手册

打开测试仪套件箱 .......................................................................................................... 2 安全使用测试仪.............................................................................................................. 4
1
测试仪的使用 ................................................................................................................. 7
本章的目的..................................................................................................................... 7 给测试接通电源.............................................................................................................. 7 将测试仪复位 ................................................................................................................. 8 改变背衬光..................................................................................................................... 9 视屏判读 ........................................................................................................................ 10 菜单的选择..................................................................................................................... 11 测量接口 ........................................................................................................................ 12 用连通和检视(Connect-and-View™)显示未知信号.................................................... 13 进行测量 ........................................................................................................................ 14 锁定视屏 ........................................................................................................................ 16
CR6853设计手册

VDD _ ON TD _ ON = − RIN × C1 × ln 1 − V −I DC DD _ ST × RIN
………………(3.1)
其中 IDD_ST 为 CR6853 的启动电流;TD_ON 为系统的启动延迟时间;RIN 为 R1 Байду номын сангаас R2 电阻值之和。
3
CR6853 应用指导书
CR6853 应用指导书
7. Rsense 输入端
CR6853 采用电流模式 PWM 控制技术,初级峰值电流通过电流检测电阻 Rsense 转化为电压反馈到 Sense 端。由于在开关管导通瞬间会有脉冲峰值电流,如果此时采样电流值,会导致错误的控制。内置的 前沿消隐(LEB)电路,就是为了防止这种错误的控制。在开关管导通后,经过一段前沿消隐时间(典型 300ns)才去控制电流限制比较器,可以为系统节省一个外部的 RC 网络。 如果由于 Sense 端的电流反馈信号前沿噪声干扰持续时间超过芯片内置的前沿消隐(LEB)时间导致系 统性能异常,可以考虑外接 R-C 网络,但建议 R-C 的取值不宜过大,否则可能会引起电流反馈信号的失真 过大,导致系统启动或输出端短路时 MOSFE 漏源端电压 Vds 过高等常见的系统异常现象。推荐 R-C 网络 的取值为:R≤680Ω,C≤1000PF。没有特别的需要,不建议外接 R-C 网络。 正常工作时,PWM 占空比由 Sense 端电压和 FB 端电压共同调整。
图 1.6 FB 低通滤波器
4) 、当系统工作在输出空载,轻载或满载转空载的情况下,如果发现输出端电压在较大范围内波动时, 首先确定电路设计、PCB layout 是否正确及环路是否稳定,如果确定无误,请再次检查变压器给芯片供电 的辅助绕组是否能保证系统在输出空载或轻载的情况下芯片 VDD 端的电压在 8.8V(UVLO 典型值)以上, 否则系统可能工作在 UVLO 临界状态。值得注意的是变压器辅助线圈在设计时需要把与 VDD 端相连的整 流二极管的管压降以及限流电阻的压降考虑进去,另外还要考虑变压器层间耦合系数/强度的关系;耦合较 弱时,空载时芯片 VDD 端电压值较低,容易进入 UVLO 状态,但是满载状态下 VDD 端电压上升较少; 耦合过强,对提高空载时芯片 VDD 端电压稳定系统有较大的帮助,但满载状态下 VDD 端电压上升较多, 容易让芯片进入 OVP 状态。考虑到系统满载瞬间转空载或空载瞬间转满载时由于能量瞬变导致 VDD 端 电压下冲误触发 UVLO 的原因, 在系统允许的输入电压范围内且系统输出为空载时建议芯片 VDD 端电压 要>11.5V,特别要注意高端输入电压如 264V/50Hz 时的情况。 6
安桥686功放说明书

USB:当选择“NET”输入选择器,连接 USB 设备且选择 USB 输入时亮起。如果 USB 未正确连接,则会闪烁。 HDMI:已输入 HDMI 信号并且已选定 HDMI 输入选择。 DIGITAL:已输入数字信号且已选定数字输入。 3. 根据输入数字音频信号的类型和聆听模式亮起。 4. 在下列情况下亮起。 RDS(欧洲、澳大利亚及亚洲产品类型):接收 RDS 广播。 TUNED:接收 AM/FM 电台。 FM ST:接收 FM 立体声。 SLEEP:已设定睡眠定时器。( p101) AUTO STBY:已设置 Auto Standby。( p101) 5. 开启静音时闪烁。
连接电视 连接 ARC 电视 连接非 ARC 电视
连接播放设备 连接装有 HDMI 接口的 AV 设备 连接无 HDMI 接口的 AV 设备 连接音频组件 连接视频摄像机等
连接单独房间中的 AV 设备(多区域连接) 连接前置主放大器 (ZONE 2)
连接天线
目录 ≫ 连接 ≫ 播放 ≫ 设置 ≫
5 网络连接
MAIN/ZONE 2 按钮:控制多区域功能 ( p63)。(本机不使用 ZONE 3 按钮。)
9. 播放按钮:用于 Music Server ( p52) 或 USB 设备 ( p49) 的播放操
作。
10.
按钮:用于 Music Server ( p52) 或 USB 设备 ( p49) 的重复/随
12. MASTER VOLUME 13. 按 LISTENING MODE 按钮(上方)来选择“Movie/TV”、“Music”或 “Game”,然后
旋转 LISTENING MODE 旋钮(下方)更改聆听模式。( p66) 14. 您可以调整前置扬声器的音质。按 TONE 按钮(上方)从“Bass”和“Treble”中选择
CR6842设计指导书V1.0
当 VFB>4.4V 持续 80mS 的时间, 关闭开关管,状态被保持。此时芯片 VDD 电压必须降低到 VDD_OFF 后,再启
动才能恢复正常。VFB<1.0V(典型值)时,CR6842 的 Gate 端口立即停止输出脉冲,保证整个系统的安全。
注意事项:
1).芯片在设计初始为了降低系统工作在空载或较轻负载(1/30 满载)的状态下系统整机的功率损耗,
CR6842 采用传统的电流模式结构设计,其关断时间根据峰值电流调整,通过与主开关管 MOSFET 源极相 连接的电流反馈电阻 Rsense 转化成电压反馈到 CR6842 的第 6 脚 SENSE 端来实现控制。在正常工作时,这 个峰值电流与 FB 具有如下关系式:
VFB:
FB 端的电压。
Rs:
与主开关管 MOSFET 源极相连接的电流反馈电阻阻值
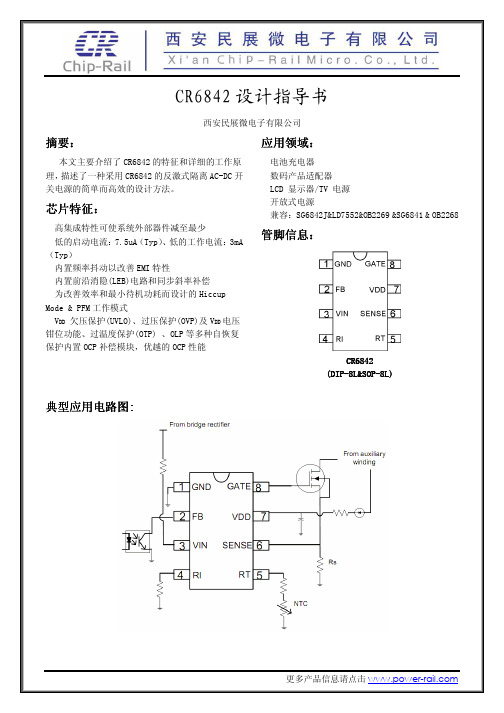
电池充电器 数码产品适配器 LCD 显示器/TV 电源 开放式电源 兼容:SG6842J&LD7552&OB2269 &SG6841 & OB2268
管脚信息:
CR6842 (DIP-8L&SOP-8L)
典型应用电路图:
更多产品信息请点击
CR6842 设计指导书
折算到流过光耦发射端二极管的电流 IF 最大仅为 0.63mA,这个电流将无法满足 TL431 的最小工作电流
(1mA),所以在系统设计时,使用 CR6842 设计的系统必须给次级 TL431 提供一个常态偏置电阻(见图 2.5
电路中的 Rbias),使 TL431 工作在正常的状态,否则系统的负载调整率或其他性能可能会发生异常,在 16V
TD _ ON
= −RIN
× C1 × ln 1− VDC
苏州创泰电子 CT6840 使用说明书
CT6840使用说明书版本号:h180426一、主要功能温度显示、温度控制(可设定制冷/制热模式)、压缩机开机延时保护、温度探头故障时可以按设定的开停比定期运行、两种化霜模式(电热、热气)、三种化霜启动模式(时间间隔、累计压缩机运转时间、实时钟)、两种化霜结束模式(定时、温度时间双重控制)、化霜滴水、手动化霜、七种风机运行模式(风机提前/延时启动、延时停止、温控启停、时控启停、常开、常停、化霜时启动或停止)、高低温告警、传感器异常告警、一路外部告警信号输入、密码口令、实时钟、华氏摄氏转换。
二、技术指标●温度范围:-50~150℃(分辨率0.1℃) -58~302℉(分辨率0.1℉)●电源电压:220V±10%或380V±10%,参见产品后贴●使用环境:温度-30℃~80℃,湿度≤85%,无凝露●输出触点容量:8A/250VAC (纯阻性负载)●温度传感器:NTC R25=5kΩ,B(25/50)=3470K三、操作指南温度设定制制化风告●数码管显示含义数码管在正常时显示温度,如果显示“SHr”表示温度传感器短路,“OPE”表示温度传感器断线。
在显示当前温度时按住“ ”键,就会显示蒸发器传感器的温度。
松开键则恢复到显示当前温度状态。
注意如果按键超过5秒会强制进入或退出化霜状态。
●设置温度在显示温度状态,长按“S”键2秒,进入温度设置状态,这时数码显示器上显示的温度即为设定温度,然后用上或下键改变设定值(“ ”键增0.1℃,“ ”键减0.1℃,按住不放超过0.5秒则快速增减)。
设置完成后按“S”键退出设置状态。
设置过程中按“M”键表示放弃,退出但不保存设置值。
●查看和调整实时钟时间在显示温度状态,按“S”键可切换到显示时间状态。
在显示时间状态,长按“S”键可进入调整时间状态,短按“S”键回到显示温度状态。
在调整时间状态,先是小时部分闪烁,用上下键可调整小时,然后按“S”键,分钟部分闪烁,用上下键调整,再按“S”键退出。
红岩 RR121系列TMR数字推挽磁敏感器说明书

1 DescriptionThe RedRock ™ RR121 Series is a magnetic sensor with digital push-pull output ideal for use in medical, industrial, automotive, and con-sumer applications. Based on patented Tunneling Magnetoresistance (TMR) technology with seamless CMOS integration, the RR121 offers multiple configurations of several parameters to enable applications like proximity sensing, rotary sensing, and level detection.The RR121 features available operate sensitivities from 9 G (0.9 mT) to 70 G (7 mT), and either omnipolar, unipolar, or bipolar magnetic field response. It has the world’s lowest average current drain (200 nA) for an active magnetic sensor, as well as operatingfrequencies up to 10 kHz and high operating temperature ranges from -40°C up to 125°C.2 FeaturesuOperate sensitivity from 9 G to 70 G u Lowest Average Current < 200 nAu Omnipolar, Unipolar and Bipolar Latching Responses Available u Operating Frequencies up to 10 kHz u Temperature Rated up to 125°C u RoHS & REACH Compliant3 ApplicationsuProximity Detection u Rotary Sensingu Fluid Level Detectionu Door & Lid Closure Detection u Utility Metersu Portable Medical Devices u Motor Controllers u Consumer Electronics u Wake-Up m ProcessorFunctional Block DiagramV DDDIGITAL PUSH-PULL OUTPUTGNDS OT -23-3L GA-4L ea ded L G A -4Device PackagesDevice InformationTable of Contents1. Description (1)2. Features (1)3. Applications (1)4. Specifications for all RR121 Series Sensors (4)4.1 Absolute Environmental Ratings for all RR121 Series Sensors (4)4.2 Absolute Electrical Ratings for all RR121 Series Sensors (4)4.3 Operating Electrical Characteristics for all RR121 Series Sensors (4)5. Operating Characteristics for RR121-1B13-311 and RR121-1B13-312 (5)6. Operating Characteristics for RR121-1A23-311 (5)7. Operating Characteristics for RR121-1F23-31 (6)8. Operating Characteristics for RR121-1B53-311 (6)9. Operating Characteristics for RR121-1A53-311 (7)10. Operating Characteristics for RR121-1E73-311 (7)11. Operating Characteristics for RR121-1B93-312 (7)12. Operating Characteristics for RR121-2A32-364 (8)13. Operating Characteristics for RR121-3C63-311 (8)14. Operating Characteristics for RR121-3C73-311 (8)15. Operate & Release Lobe Plots (9)15.1 RR121-1B13-311 (9)15.2 RR121-1B13-312 (9) (9)15.3 RR121-1A23-31115.4 RR121-1B53-311 (9)16. Graphs - Typical Electrical Characteristics (10)16.1 RR121-1B13-311 & RR121-1B13-312 Average Supply Current vs Supply Voltage vs Temperature (10)16.2 RR121-1B13-311 & RR121-1B13-312 Average Supply Current vs Temperature vs Supply Voltage (10)16.3 RR121-1B13-311 & RR121-1B13-312 Sampling Frequency vs Supply Voltage vs Temperature (10)16.4 RR121-1B13-311 & RR121-1B13-312 B OPN (Blue) and B OPS (Red) vs Supply Voltage at +25ºC (11)16.5 RR121-1B13-311 & RR121-1B13-312 B RPN (Blue) and B RPS (Red) vs Supply Voltage at +25ºC (11)16.6 RR121-1B13-311 & RR121-1B13-312 B OPN (Blue) and B OPS (Red) vs Operating Temperature at V DD=3.0 V (11)16.7 RR121-1B13-311 & RR121-1B13-312 B RPN (Blue) and B RPS (Red) vs Operating Temperature at V DD=3.0 V (11)16.8 RR121-1A23-311 & RR121-1F23-311 & RR121-2E23-311 Average Supply Current vs Supply Voltage vs Temperature (12)16.9 RR121-1A23-311 & RR121-1F23-311 & RR121-2E23-311 Average Supply Current vs Temperature vs Supply Voltage (12)16.10 RR121-1A23-311 & RR121-1F23-311 & RR121-2E23-311 Sampling Frequency vs Supply Voltage vs Temperature (12)16.11 RR121-1A23-311 B OPN (Blue) and B OPS (Red) vs Supply Voltage at +25ºC (13)16.12 RR121-1A23-311 B RPN (Blue) and B RPS (Red) vs Supply Voltage at +25ºC (13)16.13 RR121-1A23-311 B OPN (Blue) and B OPS (Red) vs Operating Temperature at V DD=3.0 V (13)16.14 RR121-1A23-311 B RPN (Blue) and B RPS (Red) vs Operating Temperature at V DD=3.0 V (13)16.15 RR121-1B53-311 & RR121-1A53-311 Average Supply Current vs Supply Voltage vs Temperature (14)16.16 RR121-1B53-311 & RR121-1A53-311 Average Supply Current vs Temperature vs Supply Voltage (14)16.17 RR121-1B53-311 & RR121-1A53-311 Sampling Frequency vs Supply Voltage vs Temperature (14)16.18 RR121-1B53-311 B OPN (Blue) and B OPS (Red) vs Supply Voltage at +25ºC (15)16.19 RR121-1B53-311 B RPN (Blue) and B RPS (Red) vs Supply Voltage at +25ºC (15)16.20 RR121-1B53-311 B OPN (Blue) and B OPS (Red) vs Operating Temperature at V DD=3.0 V (15)16.21 RR121-1B53-311 B RPN (Blue) and B RPS (Red) vs Operating Temperature at V DD=3.0 V (15)16.22 RR121-3C63-311 Average Supply Current vs Supply Voltage vs Temperature (16)16.23 RR121-3C63-311 Average Supply Current vs Temperature vs Supply Voltage (16)16.24 RR121-3C63-311 Sampling Frequency vs Supply Voltage vs Temperature (16)16.25 RR121-1E73-311 & RR121-3C73-311 Average Supply Current vs Supply Voltage vs Temperature (17)16.26 RR121-1E73-311 & RR121-3C73-311 Average Supply Current vs Temperature vs Supply Voltage (17)16.27 RR121-1E73-311 & RR121-3C73-311 Sampling Frequency vs Supply Voltage vs Temperature (17)16.28 RR121-1B93-312 & RR121-3C73-311 Sampling Frequency vs Supply Voltage vs Temperature (17)16.29 RR121-1B93-312 B OPN (Blue) and B OPS (Red) vs Supply Voltage at +25ºC (18)16.30 RR121-1B93-312 B RPN (Blue) and B RPS (Red) vs Supply Voltage at +25ºC (18)16.31 RR121-1B93-312 B OPN (Blue) and B OPS (Red) vs Operating Temperature at V DD=3.0 V (18)16.32 RR121-1B93-312 B RPN (Blue) and B RPS (Red) vs Operating Temperature at V DD=3.0 V (18)16.33 RR121-1B93-312 Average Supply Current vs Supply Voltage vs Temperature (19)16.34 RR121-1B93-312 Average Supply Current vs Temperature vs Supply Voltage (19)17. Application Information (20)17.1 Application Circuit (SOT-23-3) (20)17.2 Application Circuit (LGA-4) (20)17.3 Application Circuit (Leaded LGA-4) (20)18. Part Selection & Ordering Information (21)18.1 Part Selection Table (21)18.2 Device Nomenclature Ordering Information (21)19. Axis of Sensitivity (21)20.Dimensions (22)20.1 LGA-4 Package Dimensions (22)20.2 SOT-23-3 Package Dimensions (22)20.3 Leaded LGA-4 Package Dimensions (22)21. T MR Sensor Location (23)21.1 LGA Package (23)21.2 SOT Package (23)21.3 Leaded LGA Package (23)22. Magnetic Flux Response Diagrams (24)22.1 Omnipolar Magnetic Flux Response (Active Low Option) (24)22.2 Bipolar Magnetic Flux Response (Active Low Option) (24)22.3 Unipolar Magnetic Flux Response (Dual Active Low Option) (24)23. Output Behavior vs. Magnetic Field Diagrams (25)23.1 Output Behavior vs. Magnetic Field - Omnipolar (25)23.2 Output Behavior vs. Magnetic Field - Bipolar (25)23.3 Output Behavior vs. Magnetic Field - Unipolar (Dual Output) (25)24. TMR Sensor & Switch Packaging (26)24.1 SOT-23-3 Tape & Reel Packaging (26)24.2 LGA-4 & Leaded LGA-4 Tape & Reel Packaging (27)25. Suggested Pb-Free Reflow Profile (28)26. Suggested Solder Pad Layout (29)26.1 SOT-23-3 Solder Pad Layout (29)26.2 LGA-4 Solder Pad Layout (29)26.3 Leaded LGA-4 Solder Pad Layout (29)4 Specifications for all RR121 Series Sensors4.1 Absolute Environmental Ratings for all RR121 Series Sensors14.2 Absolute Electrical Ratings for all RR121 Series Sensors14.3 Operating Electrical Characteristics for all RR121 Series Sensors2Notes:1. Exceeding Absolute Ratings may cause permanent damage to the device. Exposure at the maximum rated conditions for extended periods of time mayalso affect device reliability.2. Unless otherwise specified, all characteristics are measured at 25ºC.3. See "Magnetic Field vs. Output Status" for more details.ESD Note: This product uses semiconductors that can be damaged by electrostatic discharge (ESD). When handling, proper ESD precautions should be taken to avoid performance degradation or loss of functionality. Damage due to inappropriate handling is not covered under warranty.5 Operating Characteristics for RR121-1B13-311 and RR121-1B13-3121Notes:1. Unless otherwise specified, V DD =2.7 V to3.6 V, T A = -40ºC to +125ºC. Typical values are V DD = 3.0 V and T A = +25ºC.2. Conditions: t = 10 seconds3. Conditions: B HYST = | B OP -B RP |6 Operating Characteristics for RR121-1A23-3111Notes:1. Unless otherwise specified, V DD =2.7 V to3.6 V, T A = -40ºC to +125ºC. Typical values are V DD = 3.0 V and T A = +25ºC.2. Conditions: t = 10 seconds3. Conditions: B HYST = | B OP -B RP |Notes:1. Unless otherwise specified, V DD =2.7 V to3.6 V, T A = -40ºC to +125ºC. Typical values are V DD = 3.0 V and T A = +25ºC.2. Conditions: t = 10 seconds3. Conditions: B HYST = | B OP -B RP |8 Operating Characteristics for RR121-1B53-3111Notes:1. Unless otherwise specified, V DD =2.7 V to3.6 V, T A = -40ºC to +125ºC. Typical values are V DD = 3.0 V and T A = +25ºC.2. Conditions: t = 10 seconds3. Conditions: B HYST = | B OP -B RP |10 Operating Characteristics for RR121-1E73-311111 Operating Characteristics for RR121-1B93-3121Notes:1. Unless otherwise specified, V DD =2.7 V to3.6 V, T A = -40ºC to +125ºC. Typical values are V DD = 3.0 V and T A = +25ºC.2. Conditions: t = 10 seconds3. Conditions: B HYST = | B OP -B RP |13 Operating Characteristics for RR121-3C63-311114 Operating Characteristics for RR121-3C73-3111Notes:1. Unless otherwise specified, V DD =2.7 V to3.6 V, T A = -40ºC to +125ºC. Typical values are V DD = 3.0 V and T A = +25ºC.2. Conditions: t = 10 seconds3. Conditions: B HYST = | B OP -B RP |15 Operate & Release Lobe PlotsOperate and release distances show are relative. The actual operate and release distances will depend on the type of magnet that is used.15.1 RR121-1B13-31115.2 RR121-1B13-312–––– Operate Distance (mm)–––– Release Distance (mm)–––– Operate Distance (mm)–––– Release Distance (mm)15.3 RR121-1A23-311–––– Operate Distance (mm)–––– Release Distance (mm)15.4 RR121-1B53-311–––– Operate Distance (mm)–––– Release Distance (mm)16 Graphs - Typical Electrical CharacteristicsV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)A v e r a g e S u p p l y C u r r e n t (n A )010*******4005006002.92.72.53.13.33.53.7Supply Voltage (V)S a m p l i n g F r e q u e n c y (H z )1.01.31.61.92.22.52.8A v e r a g e S u p p l y C u r r e n t (n A )010020030040050060020-15-505590125160Ambient Temperature (ºC)16.1 RR121-1B13-311 and RR121-1B13-312Average Supply Current vs.Supply Voltage vs. Temperature16.2 RR121-1B13-311 and RR121-1B13-312Average Supply Current vs.Temperature vs. Supply VoltageS a m p l i n g F r e q u e n c y (H z ) 1.01.31.61.92.22.52.82.92.72.53.13.33.53.7Supply Voltage (V)16.3 RR121-1B13-311 and RR121-1B13-312Sampling Frequency vs.Supply Voltage vs. Temperature16 Graphs - Typical Magnetic CharacteristicsV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)B O P (G )-45-30-1501530452.9-2.7-2.5 3.13.33.53.7Supply Voltage (V)B R P (G )-30-20-10010203010-20-504070100130Operating Temperature (ºC)B R P (G )-30-20-1020302.9-2.7-2.53.1 3.3 3.5 3.7Supply Voltage (V)B O P (G )-45-30-1515304510-20-504070100130Operating Temperature (ºC)B R P (G )-30-20-10010203010-20-504070100130Operating Temperature (ºC)16.4 RR121-1B13-311 and RR121-1B13-312B OPN (Blue) and B OPS (Red) vs. Supply Voltage at +25ºC16.6 RR121-1B13-311 and RR121-1B13-312B OPN (Blue) and B OPS (Red) vs. Operating Temperature at V DD =3.0 V16.5 RR121-1B13-311 and RR121-1B13-312B RPN (Blue) and B RPS (Red) vs. Supply Voltage at +25ºC16.7 RR121-1B13-311 and RR121-1B13-312B RPN (Blue) and B RPS (Red) vs. Operating Temperature at V DD =3.0 V16 Graphs - Typical CharacteristicsV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)A v e r a g e S u p p l y C u r r e n t (n A )0100200300400500600Supply Voltage (V)A v e r a g e S u p p l y C u r r e n t (n A )0100200300400500600Ambient Temperature (ºC)16.8 RR121-1A23-311 and RR121-1F23-311Average Supply Current vs.Supply Voltage vs. Temperature16.9 RR121-1A23-311 and RR121-1F23-311Average Supply Current vs.Temperature vs. Supply VoltageS a m p l i n g F r e q u e n c y (H z )7.08.09.010.011.012.013.02.92.72.53.13.33.53.7Supply Voltage (V)16.10 RR121-1A23-311 and RR121-1F23-311Sampling Frequency vs.Supply Voltage vs. Temperature16 Graphs - Typical Magnetic CharacteristicsV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)B O P (G )-12-8-4048122.9-2.7-2.5 3.13.33.53.7Supply Voltage (V)B O P (G )-15-10-505101510-20-504070100130Operating Temperature (ºC)B R P (G )-7.5-5.0-2.502.55.07.510-20-504070100130Operating Temperature (ºC)B R P (G )-9-6-33692.9-2.7-2.53.1 3.3 3.5 3.7Supply Voltage (V)16.11 RR121-1A23-311 B OPN (Blue) and B OPS (Red) vs. Supply Voltage at +25ºC16.12 RR121-1A23-311 B RPN (Blue) and B RPS (Red) vs.Supply Voltage at +25ºCB O P (G )-15-10-505101510-20-504070100130Operating Temperature (ºC)B R P (G )-7.5-5.0-2.502.55.07.510-20-504070100130Operating Temperature (ºC)16.13 RR121-1A23-311 B OPN (Blue) and B OPS (Red) vs. Operating Temperature at V DD =3.0 V16.14 RR121-1A23-311 B RPN (Blue) and B RPS (Red) vs. Operating Temperature at V DD =3.0 V16 Graphs - Typical CharacteristicsV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)A v e r a g e S u p p l y C u r r e n t (µA )00.30.60.91.21.51.82.92.72.53.13.33.53.7Supply Voltage (V)A v e r a g e S u p p l y C u r r e n t (n A )00.30.60.91.21.51.820-15-505590125160Ambient Temperature (ºC)16.15 RR121-1B53-311 and RR121-1A53-311Average Supply Current vs.Supply Voltage vs. Temperature16.16 RR121-1B53-311 and RR121-1A53-311Average Supply Current vs.Temperature vs. Supply VoltageS a m p l i n g F r e q u e n c y (H z )1501802102402703003302.92.72.53.13.33.53.7Supply Voltage (V)16.17 RR121-1B53-311 and RR121-1A53-311Sampling Frequency vs.16 Graphs - Typical Magnetic CharacteristicsV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)B O P (G )-45-30-1501530452.9-2.7-2.53.13.33.53.7Supply Voltage (V)B O P (G )-45-30-15015304510-20-504070100130Operating Temperature (ºC)B R P (G )-30-20-10010203010-20-504070100130Operating Temperature (ºC)B R P (G )-30-20-101020302.9-2.7-2.53.13.33.53.7Supply Voltage (V)16.18 RR121-1B53-311 B OPN (Blue) and B OPS (Red) vs. Supply Voltage at +25ºC16.19 RR121-1B53-311 B RPN (Blue) and B RPS (Red) vs.Supply Voltage at +25ºCB O P (G )-45-30-15015304510-20-504070100130Operating Temperature (ºC)B R P (G )-30-20-10010203010-20-504070100130Operating Temperature (ºC)16.20 RR121-1B53-311 B OPN (Blue) and B OPS (Red) vs. Operating Temperature at V DD =3.0 V16.21 RR121-1B53-311 B RPN (Blue) and B RPS (Red) vs. Operating Temperature at V DD =3.0 VV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)A v e r a g e S u p p l y C u r r e n t (µA )00.51.01.52.02.53.02.92.72.53.13.33.53.7Supply Voltage (V)A v e r a g e S u p p l y C u r r e n t (µA )00.51.01.52.02.53.020-15-505590125160Ambient Temperature (ºC)A v e r a g e S u p p l y C u r r e n t (µA )00.51.01.52.02.53.020-15-505590125160Ambient Temperature (ºC)Average Supply Current vs.Temperature vs. Supply VoltageS a m p l i n g F r e q u e n c y (H z )3203804405005606206902.92.72.53.13.33.53.7Supply Voltage (V)16.22 RR121-3C63-311 Average Supply Current vs.Supply Voltage vs. Temperature16.24 RR121-3C63-311 Sampling Frequency vs.Supply Voltage vs. Temperature16.23 RR121-3C63-311 Average Supply Current vs.Temperature vs. Supply VoltageV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)A v e r a g e S u p p l y C u r r e n t (µA )0246810122.92.72.53.13.33.53.7Supply Voltage (V)A v e r a g e S u p p l y C u r r e n t (µA )02468101220-15-505590125160Ambient Temperature (ºC)16.25 RR121-1E73-311 and RR121-3C73-311Average Supply Current vs. Supply Voltage vs. Temperature16.26 RR121-1E73-311 and RR121-3C73-311Average Supply Current vs. Temperature vs. Supply VoltageS a m p l i n g F r e q u e n c y (k H z )1.01.52.02.53.03.54.02.92.72.53.13.33.53.7Supply Voltage (V)16.27 RR121-1E73-311 and RR121-3C73-311Sampling Frequency vs. Supply Voltage vs. TemperatureS a m p l i n g F r e q u e n c y (k H z )7.08.09.010.011.012.013.02.92.72.53.13.33.53.7Supply Voltage (V)16.28 RR121-1B93-312 Sampling Frequency vs. Supply Voltage vs. TemperatureV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)B O P (G )-45-30-1501530452.9-2.7-2.5 3.13.33.53.7Supply Voltage (V)B R P (G )-30-20-10010203010-20-504070100130Operating Temperature (ºC)B R P (G )-30-20-101020302.9-2.7-2.53.1 3.3 3.5 3.7Supply Voltage (V)16.29 RR121-1B93-312 B OPN (Blue) and B OPS (Red) vs. Supply Voltage at +25ºC16.30 RR121-1B93-312 B RPN (Blue) and B RPS (Red) vs. Supply Voltage at +25ºCB O P (G )-45-30-1515304510-20-504070100130Operating Temperature (ºC)B R P (G )-30-20-10010203010-20-504070100130Operating Temperature (ºC)16.31 RR121-1B93-312 B OPN (Blue) and B OPS (Red) vs. Operating Temperature at V DD =3.0 V16.32 RR121-1B93-312 B RPN (Blue) and B RPS (Red) vs. Operating Temperature at V DD =3.0 VV DD = 3.0 V and T A = +25 ºC, C DD = 1.0 µF (unless otherwise specified)A v e r a g e S u p p l y C u r r e n t (µA )0714212835422.92.72.53.13.33.53.7Supply Voltage (V)A v e r a g e S u p p l y C u r r e n t (µA )07a142128354220-15-505590125160Ambient Temperature (ºC)16.33 RR121-1B93-312 Average Supply Current vs. Supply Voltage vs. Temperature16.34 RR121-1B93-312 Average Supply Current vs. Temperature vs. Supply Voltage17.1 Application Circuit(SOT-23-3)17.2 Application Circuit(LGA-4)17.3 Application Circuit(Leaded LGA-4)GNDRR121V OUTV DD2131.0m FGNDRR121V OUTV DD3241.0m FGND1.0m FRR121V OUT1V DD4321V OUT2RR121 Push-Pull Output Application CircuitThe output voltage on the RR121 is active low, meaning that while a sufficiently strong magnetic field is present, the output voltage is low. The output voltage can be connected to a digital I/O pin on a microcon-troller. A decoupling capacitor between the supply voltage and ground is required with placement close to the magnetic sensor. A typical capacitor value of 1.0 m F will suffice.17 Application InformationGNDV DDOUTSOT-23-3 PackageDDLGA-4 Package (Active Low)OUT1 43 V DD2 GNDOUT2 1Leaded LGA-4 Package (Dual Active Low)19 Axis of Sensitivity18 Part Selection and Ordering Information18.1 Part Selection TableNote:1. Custom options available for Sensitivity, Frequency, Temperature Rating, Supply Voltage, Output Response & more. ************************************************.Ordering InformationRR121-X X X X-Y Y YSeriesMagnetic Sensitivity A: Op 9, Rel 5 E: Op 15, Rel 10 B: Op 30, Rel 20 F: Op 70, Rel 50C: Op 10, Rel -10Temp Rating (ºC)2: -40- +853: -40-+125Clock Frequency (Hz)1: 2 Hz 5: 250 Hz 9: 10000 Hz 2: 10 Hz 6: 500 Hz 3: 20 Hz 7: 2500 HzMagnetic Polarity Response 1 = Omnipolar 3 = Bipolar/Latch 2 = UnipolarSupply Voltage/Output 3: 3V Output Response 1: Active Low 6: Dual Active Low Package 1: SOT-23-32: LGA-44: Leaded LGA-4(Dual Active Low Output Only)18.2 Device Nomenclature20 Dimensions Millimeters (Inches)20.2 SOT-23-3 Package2.80±Top ViewEnd View20.1 LGA-4 Package20.3 Leaded LGA-4 Package0.650.35±.05±.002)0.20±.05(0.014±.002)0.20(0.008(0.005)Top ViewSide ViewBottom View0.150.35±.05±.002)0.20±.05±.002)0.55±.05(0.022±.002)(0.005)Top ViewSide ViewBottom View21.1 LGA Package 21.3 Leaded LGA Package 21.2 SOT Package21 TMR Sensor Location1.60 mm2.90 mm22 Magnetic Flux Response Diagrams22.1 Omnipolar Magnetic Flux Response(Active Low Option)22.3 Unipolar Magnetic Flux Response(Dual Active Low Option)RPOPHYSOPRPHYSN-PoleS-Pole22.2 Bipolar Magnetic Flux Response(Active Low Option)0HYS23 Output Behavior vs. Magnetic Field Diagrams23.1 Output Behavior vs. Magnetic Field - Omnipolar23.2 Output Behavior vs. Magnetic Field - Bipolar23.3 Output Behavior vs. Magnetic Field - Unipolar (Dual Output)OUTPUT2: North FieldOUTPUT1: South Field24.1 SOT-23-3 Tape & Reel PackagingStandard packaging is Tape & Reel containing 3,000 pieces. MSL Rating is 1.see Fig. B below2.0 ± 0.05Ø1.1 ± 0.14.0 ± 0.014.0 ± 0.011.75 ± 0.13.5 ± 0.058.0 ± 0.22.75Ø1.5+0.1-01.1 ± 0.1Ao3.3 ± 0.15º MAX.(2X)5º MAX.(2X)R 0.3R 0.3Ko1.47 ± 0.10.20 ± 0.055º MAX.(2X)5º MAX.R 0.3R0.30.6B o 3.2 ± 0.12.55 ± 0.1see Fig. A belowFig. A Fig. B24.2 LGA-4 & Leaded LGA-4 Tape & Reel PackagingStandard packaging is Tape & Reel containing 3,000 pieces. MSL Rating is 3..±.55.±..5seeFig. Bbelow1.5+0.1+0 4.0±0.102.0±0.054.0±0.101.75 ± 0.13.5 ± 0.058.±.21.65±0.55º MAX.0.65±0.051.65±0.050.25±0.025º MAX.seeFig. AbelowFig. A Fig. BNotes:1. Fully compatible with standard no-lead solder profile, 260 ºC for 30 seconds max (3 cycles max).2. Profile shown as example. Users are advised to develop their own board-level profile.3. Suggested Pb-free reflow profile derived from IPC/JEDEC J-STD-020E.4. Temperature tolerance: +0 ºC, as measured at any point on the package or leads5. MSL rating of 1 (SOT-23-3 only) compatible with J-STD-020 or equivalent.6. MSL rating of 3 (LGA-4 and Leaded LGA-4) compatible with J-STD-020 or equivalent.7. All temperatures refer to the center of the package, measured on the package body surface that is facing up during assembly reflow (e.g., live-bug). If parts are reflowed in other than the normal live bug assembly reflow orientation (i.e., dead-bug), Tp shall be within ± 2 °C of the live bug Tp and still meet the Tc requirements, otherwise, the profile shall be adjusted to achieve the latter. To accurately measure actual peak package body temperatures, refer to JEP140 for recommended thermocouple use.8. Reflow profiles in this document are for classification/preconditioning and are not meant to specify board assembly profiles. Actual board as-sembly profiles should be developed based on specific process needs and board designs and should not exceed the parameters in this table.25 Suggested Pb-Free Reflow Profile25TimeT e m p e r a t u r e26 Suggested Solder Pad Layout26.1 SOT -23-3 Solder Pad Layout26.2 LGA-4 Solder Pad Layout26.3 Leaded LGA-4 Solder Pad Layout0.650.384X 0.55(0.022)Dimensions in mm (inches)。
用于骨折闭合复位的计算机辅助导航方法

0 引言
流 行 病 学 研 究 统 计 表 明 ,全 世 界 每 年 都 会 有 9. 0%~ 22. 8% 的人因为车祸、坠楼等意外事故和老年骨质疏松等原 因造成骨折。骨折已经严重影响到了人们的生命健康,成为 了不可忽视的问题 。 [1-2] 目前股骨干股骨折的主要治疗方法
是 髓 内 针 闭 合 复 位 手 术 ,这 种 手 术 方 法 的 骨 折 愈 合 率 高 到 90%~99%,并且感染率低[3-4]。但是这种方法通常需要医生和 病人长时间暴露在 X 光射线下,辐射时间能达到 5~10 min[5-6], 对医生和患者身体造成很大的伤害,而且 X 射线透视图仅提 供的二维透视信息,存在三维纵向信息丢失、图像畸变等问
Journal of Computer Applications 计算机应用, 2021, 41( S1) : 211 - 215
ISSN 1001⁃9081 CODEN JYIIDU
2021⁃ 06⁃ 30 http:/ / www. joca. cn
文章编号:1001-9081(2021)S1-0211-05
(1. School of Automation, Harbin University of Science and Technology, Harbin Heilongjiang 150080, China; 2. Suzhou Institute of Biomedical Engineering and Technology, Chinese Academy of Sciences, Suzhou Jiangsu 215163, China;
多造价高昂、体型巨大容易误伤医务人员,并且大部分机器人 都处于实验阶段,并不能作为常规治疗手段。
F-45用户手册

FLUKE 45 用户手册1.1一般性技术指标1.1.1检定周期为一年;1.1.2工作环境温度为18℃-28℃;1.1.3工作环境相对湿度不超过90%(非结露),电阻档1000kΩ以上量程相对湿度不超过70%。
精度表达形式为:±(读数%+字)2.1直流电压:2.2真有效值交流电压:2.3直流电流:2.4交流电流:2.5电阻:2.6频率:3 FLUKE-45 数字式多用表操作规范3.1使用多用表前的准备:3.1.1连接电源线,并按下电源开关,此时数表开机自检,前面板的显示器点亮,开机后,多用表将自动处于直流电压测试功能状态,自动量程有效。
3.1.2多用表使用前应预热,从开机到测试至少预热30分钟,以使内部各零件处于稳定状态,关机后重新开机需再预热,时间应大于两倍关机时间(最多30分钟)。
3.2用多用表进行测量:FLUKE-45数字式多用表进行电压、电流、电阻、频率等参数测量的步骤、方法及操作参见《FLUKE-45使用说明》。
测量中一般选用数表的自动量程转换功能,以免应误操作而损坏设备。
3.3使用后的注意事项:3.3.1测量结束应拔下测试线(表笔)妥善放置,以免下次测量时,因测量功能与输入插孔不对应而烧毁仪表。
3.3.2测量结束后关闭电源开关并拔去电源线,以防意外造成损坏。
4功能操作详解5使用比较功能比较功能(COMP)提供了一条简而易行的方法判别测量值是否超出了确定范围。
在比较模式下,仪器在主显示显示测量值,而在第二显示指示该值是高(HI),低(LO),抑或正好(PASS)落在确定范围内。
比较功能可用在很多测量功能中,例如:REL、MN MX、HOLD、和dB。
在使用该功能前,先要设定好用于比较的允许范围的最高和最低点数值,方法有三:* 可通过按下"2ND"键后,按"/\" (HI)或"\/" (LO)键来确定比较范围,此时显示的值将成为高(低)点界限值。
Extech CT20 Pro 电阻测试仪用户手册说明书
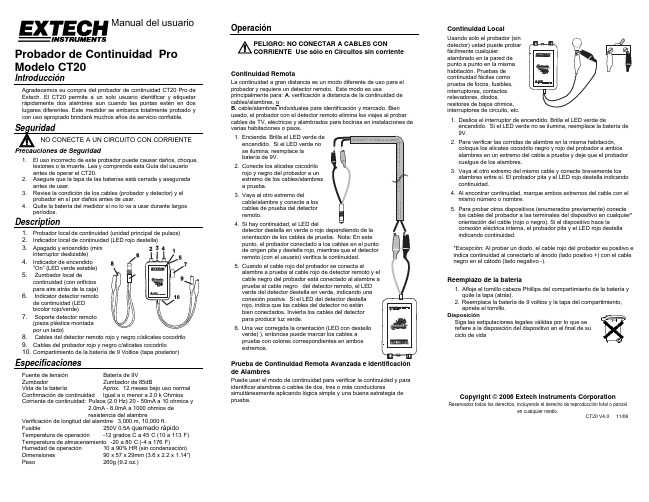
Corriente de continuidad: Pulsos (2.0 Hz) 20 - 50mA a 10 ohmios y
2Байду номын сангаас0mA - 8.0mA a 1000 ohmios de
resistencia del alambre
Verificación de longitud del alambre 3,000 m, 10,000 ft.
4. Quite la batería del medidor si no lo va a usar durante largos períodos.
Description
1. Probador local de continuidad (unidad principal de pulsos) 2. Indicador local de continuidad (LED rojo destella) 3. Apagado y encendido (mini
10 a 90% HR (sin condensación)
Dimensiones
90 x 57 x 29mm (3.6 x 2.2 x 1.14”)
Peso
260g (9.2 oz.)
Operación
PELIGRO: NO CONECTAR A CABLES CON CORRIENTE Use sólo en Circuitos sin corriente
5. Cuando el cable rojo del probador se conecta al alambre a prueba al cable rojo de detector remoto y el cable negro del probador está conectado al alambre a prueba al cable negro del detector remoto, el LED verde del detector destella en verde, indicando una conexión positva. Si el LED del detector destella rojo, indica que los cables del detector no están bien conectados. Invierta los cables del detector para producir luz verde.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CR6842 应用指导书 应用指导书
3).当系统工作在满载的情况下,如果系统出现可听及的异音时,请检查系统是否工作正常,如果你确 认无误,请检查芯片的 FB 端的电压波形是否较平滑,如果发现较大的干扰请检查系统的 PCB layout 是 否合理,对于较小的干扰可通过外加滤波网络进行抑制,如图 1.7.2 中的 RFB 及 CFB 组成的低通滤波器, 这里 RFB, CFB 的取值不宜过大,比如 47 Ohm,1000 PF;根据系统的实际情况,RFB 可以为 0 Ohm。 RFB,CFB 的取值会影响系统的环路稳定,一般 CFB 的取值建议要≤4700PF。
f PWM =
1742 ( KHz ) R1 ( K Ω)
图 1.6 频率设置电路 虽然 CR6842 推荐系统 PWM 的工作频率范围可为 45K~100KHz,但是芯片系统性能优化主要是被设计 在 50KHz~65KHz 的应用范围, 在应用时请注意。 在 PCB layout 时应尽可能使 RI 的接地端靠近芯片的 Pin 1 GND 端,以便减少干扰。
图 1.2.1 整流前启动
图 1.2.2 整流滤波后启动
图 1.2.3 OCP 补偿功能的启动
3、系统的启动时间: 系统的启动时间:
上面两种启动方式当电源上电开机时通过启动电阻 RIN 给 VDD 端的电容 C1 充电,直到 VDD 端口电 压达到芯片的启动电压 VTH(ON)(典型值 16.5V)时芯片才被激活并且驱动整个电源系统正常工作。在图 1.3.2 中系统的最大启动延迟时间满足如下运算关系:
应用领域 应用领域: 领域:
* 电池充电器 * 数码产品适配器 * LCD 显示器/TV 电源 * 开放式电源 * 384X 替代 * 兼容:SG6842J&LD7552&OB2269 &SG6841 & OB2268
管脚信息 管脚信息: 信息:
CR6842 (DIP-8L&SOP-8L)
CR6842 应用指导书 应用指导书
VDD _ ON TD _ ON = − RIN × C1 × ln 1 − V −I DC DD _ ST × RIN
(1.3.1)
其中 IDD_ST 为 CR6842 的启动电流,TD_ON 为系统的启动延迟时间,RIN 为 R1 与 R2 电阻值之和 由于芯片具有低启动电流的特性并且考虑到空载的系统损耗, RIN 可以取得较大,具体值可在 1.5MΩ~3MΩ 范围内选取,C1 推荐选用 10uF/50V。如果发生保护,输出关断,导致辅助绕组掉电,VDD 端电压开始下降,当 VDD 端电压低于芯片的关闭电压 VDD_OFF(典型 10.8V)时,控制电路关断,芯片消 耗电流变小,进入再次启动。
7、FB 输入端特性 输入端特性
CR6842 FB 端口各电压阈值相对应的系统工作状态可通过图 1.7.1 所示,其中 1.0V~1.8V 为系统在空 载或轻载时工作在 CRM 工作模式下的 FB 端电压;1.8V~4.4V 为系统在常态工作模式下的 FB 端电压; 4.4V~6.0V 为过功率保护,短路保护时 FB 端电压;6.0V 为系统开环,FB 端的短路电流典型值为 1.42mA。
CR6842/CR6845 应用指导 应用指导书 指导书 V1.2
本指导书主要介绍了 CR6842 的特征和详细的工作原理, 描述了一种采用 CR6842 的反激式隔离 AC-DC 开关电源的简单而高效的设计方法,也适用于 CR6845 的设计应用。
ቤተ መጻሕፍቲ ባይዱ
芯片特征 芯片特征: 特征:
* 高集成特性可使系统外部器件减至最少 * 低的启动电流:7.5uA(Typ) 、低的工作电流:3mA(Typ) * 内置频率抖动以改善 EMI 特性 * 内置前沿消隐(LEB)电路和同步斜率补偿 * 为改善效率和最小待机功耗而设计的 Hiccup Mode & PFM 工作模式 * VDD 欠压保护(UVLO)、过压保护(OVP)及 VDD 电压钳位功能、过温保护(OTP) 、OLP 等多种自恢复 保护内置 OCP 补偿模块,优越的 OCP 性能
典型应用电路图 典型应用电路图:
一、芯片工作原理
1、功能概述: 功能概述:
CR6842 是用于 100W 以内离线式开关电源 IC,该 IC 具有优化的图腾驱动电路以及电流模式 PWM 控制器。PWM 控制器包含频率振荡发生器以及各种保护。由振荡电路产生的频率抖动,可以改善 EMI 特 性。为了获得良好的效率和待机功耗,CR6842 在重载或中等负载时,工作在 PWM 模式。当负载逐渐减小 时,振荡器的工作频率逐渐降低,最后稳定在 10KHz 左右。在空载和轻载时,电路采用绿色模式,有效的 降低了待机功耗。保护功能包括:欠压锁定、过载保护、过温保护、过压保护及钳位等,保护解除后均可 自动恢复工作。 由于 CR6842 高度集成, 使用外围元件较少。 采用 CR6842 可以简化反激式隔离 AC-DC 开关电源设计, 从而使设计者轻松的获得可靠的系统。
图 1.1 CR6842 内部框图 2
CR6842 应用指导书 应用指导书
2、欠压锁定和启动电路及 欠压锁定和启动电路及 OCP 补偿特性: 补偿特性:
CR6842 具有两种启动方式: (1)传统的启动方式:使用 VDD 作启动脚时芯片支持从整流前启动及整 流滤波后启动的方式,其启动电路如图 1.2.1 和 1.2.2 所示; (2)具有 OCP 补偿功能的启动方式:使用 3 脚 VIN 作启动脚时芯片具有 OCP 补偿的功能, 但仅支持从整流滤波后启动的方式, 其启动电路如图 1.2.3。
图 1.7.2 FB 低通滤波器 4) 、当系统工作在输出空载,轻载或满载转空载的情况下,如果发现输出端电压在较大范围内波动时, 首先确定电路设计、PCB layout 是否正确及环路是否稳定,如果确定无误,请再次检查变压器给芯片供电 的辅助绕组是否能保证系统在输出空载或轻载的情况下芯片 VDD 端的电压在 10.8V(UVLO 典型值)以上, 否则系统可能工作在 UVLO 临界状态。值得注意的是变压器辅助线圈在设计时需要把与 VDD 端相连的整 流二极管的管压降以及限流电阻的压降考虑进去,另外还要考虑变压器层间耦合系数/强度的关系;耦合较 弱时,空载时芯片 VDD 端电压值较低,容易进入 UVLO 状态,但是满载状态下 VDD 端电压上升较少; 耦合过强,对提高空载时芯片 VDD 端电压稳定系统有较大的帮助,但满载状态下 VDD 端电压上升较多, 容易让芯片进入 OVP 状态。考虑到系统满载瞬间转空载或空载瞬间转满载时由于能量瞬变导致 VDD 端 电压下冲误触发 UVLO 的原因, 在系统允许的输入电压范围内且系统输出为空载时建议芯片 VDD 端电压 要>12.5V,这里特别要注意高端输入电压如 264V/50Hz 时的情况。
I PK =
VFB − 1.0 2.83 × RS
其中 VFB 为 FB 端的电压,Rs 为与主开关管 MOSFET 源极相连接的电流反馈电阻阻值 当 VFB>4.4V 持续 80mS 的时间, 关闭开关管,状态被保持。此时芯片 VDD 电压必须降低到 VDD_OFF 后,再启动才能恢复正常。VFB<1.0V(典型值)时,CR6842 的 Gate 端口立即停止输出脉冲,保证整个系 统的安全。 注意事项: 注意事项: 1).芯片在设计初始为了降低系统工作在空载或较轻负载(1/30 满载)的状态下系统整机的功率损耗, 系统正常工作时 CR6842 FB 端允许的最大的输出电流 IFBmax≈0.5mA,最小工作电流 IFBmin≈0.18mA; 即流过光耦接收端集射极的电流 Ic 最大为 0.5mA 左右,最小为 0.18mA 左右。假设光耦的最大传输比 CTR=0.8,系统二次侧(次级) TL431 的工作电流仅由流过光耦发射端二极管的电流 IF 提供,那么通过 Ic 折算到流过光耦发射端二极管的电流 IF 最大仅为 0.63mA,这个电流将无法满足 TL431 的最小工作电流 (1mA) , 所以在系统设计时,使用 CR6842 设计的系统必须给次级 TL431 提供一个常态偏置电阻(见图 2.5 电路中的 Rbias), 使 TL431 工作在正常的状态, 否则系统的负载调整率或其他性能可能会发生异常,在 16V 输出的系统中,考虑空载或轻载时系统的损耗因素,推荐使用的偏置电阻阻值为 2.2KΩ。 2).当 VFB=1.0~1.8V 时系统工作在绿色工作模式,如果系统出现可听及的异音,请先检查系统是否 工作正常,如果确认无误,请检查系统缓冲吸收回路中的电容材质,如果使用的是普通压电陶瓷电容, 那 么当系统工作在 CRM 工作状态时电容由于发生压电效应而可能产生异音是正常的。这时,请更换电容的 材质, 如 MYLA, PEA, MEF 或 CBB 等薄膜类电容; 考虑成本及电容体积大小的因素, 推荐使用 MYLA(缇 在保证吸收回路效果的前提下可以通过调整缓冲吸收回路中的电阻阻值来减少该电容的值有利于 纶)电容, 缩小电容体积及降低系统成本,例如 222/400V,472/400V 或 103/400V 的 MYLA(缇纶)电容可以接受的。 6
4
CR6842 应用指导书 应用指导书
图 1.5.1
Sense 端口门限与 VIN 端口输入电流的关系曲线图
6、正常工作频率和频率抖动 正常工作频率和频率抖动
CR6842 允许设计者根据系统的使用环境需要自行调整系统的工作频率,CR6842 的典型工作频率为 65KHz,其应用电路如图 1.6,RI 的取值决定了系统的工作频率,工作频率的设定可分别由以下公式计算 出来,在正常的工作频率上增加了±4%的抖动,弱化在某个频率对外辐射的能量,使系统设计更容易成功。
3742 1.5 × 10
6
≅ 93mW
(1.4.2)
5、OCP 补偿特性: 补偿特性:
1)、如果系统使用 3 脚 VIN 端口作启动时,系统会具有较好的 OCP 补偿特性。当系统的输入电压发生变 化时,通过启动电阻流过 VIN 端的电流也会发生变化,芯片通过检测该端口变化值来自动实现补偿,使系 统在较宽输入电压范围内的 OCP 曲线比较平坦,达到恒定功率输出的目的。 2) 、影响 OCP 补偿平坦度的主要参数: 频率:基于 50KHZ~65KHz 设计。 启动电阻:基于 1.8MΩ 设计。 Sense 端输入:基于省掉外部 R-C 网络设计,见 Sense 端输入的说明。 3) 、Sense 端口门限与 VIN 端口输入电流的关系曲线图如图 1.5.1 所示。从图 1.5.1 可以看出,如果 系统设计以 VIN 端口(3 脚)作为启动端,那么 VTH_oc 的值是受流过 VIN 端的电流影响的,熟悉 Sense 端门限与 VIN 端输入电流的关系曲线图对分析系统的 OCP 特性是有帮助的。