SEWmodulo旋转运动控制
地板SEW_MOVIPRO变频器VBUS的设置

地板Z06A_PLC3_ST061转台调整跟踪
电机的初始化
参数表
前提ADC配 置好IP,电 脑可以连 接变频器
打开软件MOVITOOLS MotionStudio,点击在线设备,选择 working with the unit 选项,点击参数表-----------下一步
电机的初始化
设置delivery state
将参数802设置为delivery state 变频器初始化------下一步
电机的初始化
设置电机编码器型号
根据现场的电机编码器型号选择对应型号-----下一步
电机的初始化
电机与编码器的信息 然后start-up set 1-------- 下一步
电机的初始化
电机控制类型选择vector controlled/servo-------下一步
电机的初始化
电机电气标准选择IEC------下一步
电机的初始化
1
2
电机型号选择DV132M4 电机温度报警选择IMM.STOP/FAULT 温度传感器选择TF/TH
电机的初始化
选择YES,我使用这个配置了的编码器------下一步
到了位置监控与控制画面,点击control,PO1位照图点亮,填入100脉冲, 速度、加减斜坡率,然后send PA,看看电机状态
电机的初始化
选择速度控制模式
电机的初始化
选择电压模式
电机的初始化
1
2
3
抱闸模式改为WITH→travel →drive →accept value
电机的初始化
选择完成,将参数下载到电机
BUS设置
然后回到MOVITOOLS MotionStudio,选择extended postMERG.STOP/FAULT
SEWServo伺服培训教程

SEWServo伺服培训教程SEWServo伺服是一种广泛应用于机械制造和工程领域的电子设备,它通过精确的控制电流,使机械设备的运作更加精准、稳定和有效率。
作为一种高级电子设备,SEWServo伺服需要进行专门的培训和教育,以便更好地使用和维护。
本文将介绍SEWServo伺服培训教程的相关内容,以帮助读者更好地理解和掌握SEWServo伺服的知识。
SEWServo伺服的基础知识SEWServo伺服是一种专门用于工业机械和工程设备的电子控制器。
它通常由三部分组成,包括伺服电机、伺服控制器和编码器。
伺服电机是SEWServo伺服的最核心部分,它通过精确的电流控制,使机械设备运行更为平稳和高效。
伺服控制器是伺服电机的“大脑”,它负责实时控制电流和机械运动。
编码器则用来监控机械设备的位置和速度变化,为伺服控制器提供有关运动状态的反馈信息。
SEWServo伺服的主要特点SEWServo伺服具有多种优点,使其成为工业机械中的重要元素。
其中最重要的特点如下:1. 精度高:SEWServo伺服能够实现非常高的精度要求,因为它能够根据编码器的反馈调节电流控制,使机械设备实现非常精准的位置控制。
2. 响应速度快:SEWServo伺服响应速度非常快,这是因为它可以调节电流和速度来控制机械运动,能够实时响应设备的运动要求。
3. 负载能力强:SEWServo伺服的负载能力非常强,能够控制机械设备的千分之一甚至更小的微小变化,从而提高设备的工作效率和稳定性。
SEWServo伺服的应用领域SEWServo伺服主要用于机械和工程设备领域。
它能够应用于各种工业自动化、加工、生产和制造领域,如电子、半导体、汽车、食品、医药、塑料和纺织等。
此外,SEWServo伺服还广泛应用于印刷和包装机器、工艺控制系统、医疗和科学仪器等领域。
SEWServo伺服培训教程SEWServo伺服培训教程包括基础和进阶两个部分。
基础部分主要介绍SEWServo伺服的基本知识和操作方法,包括伺服电机、伺服控制器和编码器的组成、电路原理、控制方式、调节程序和参数设置等方面。
SEW-零点设置方法
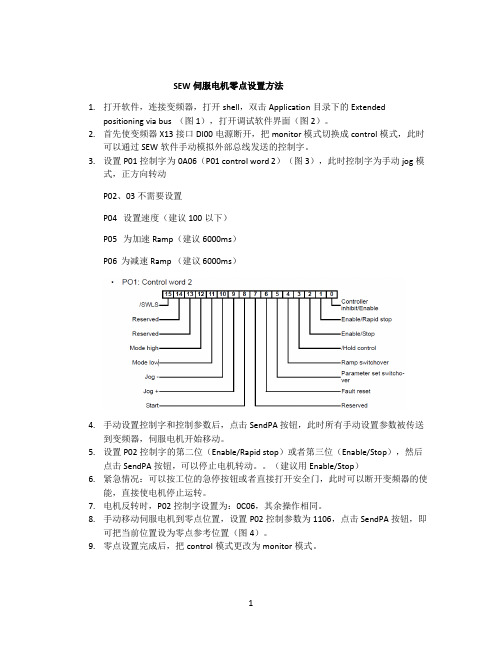
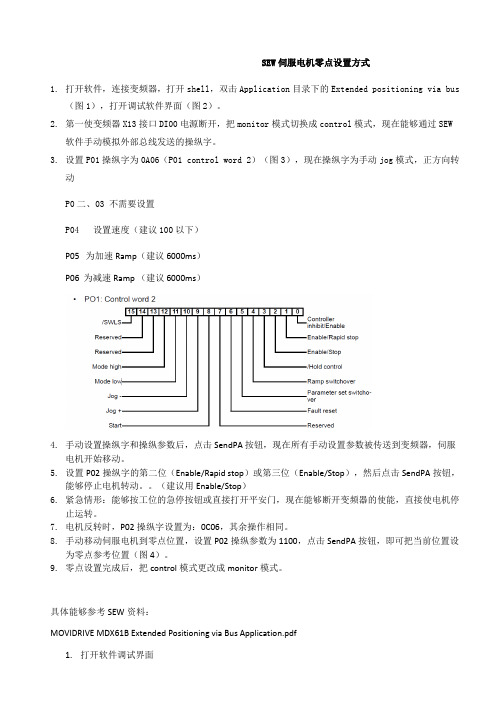
SEW伺服电机零点设置方法1.打开软件,连接变频器,打开shell,双击Application目录下的Extendedpositioning via bus (图1),打开调试软件界面(图2)。
2.首先使变频器X13接口DI00电源断开,把monitor模式切换成control模式,此时可以通过SEW软件手动模拟外部总线发送的控制字。
3.设置P01控制字为0A06(P01 control word 2)(图3),此时控制字为手动jog模式,正方向转动P02、03 不需要设置P04 设置速度(建议100以下)P05 为加速 Ramp(建议6000ms)P06 为减速Ramp (建议 6000ms)4.手动设置控制字和控制参数后,点击SendPA 按钮,此时所有手动设置参数被传送到变频器,伺服电机开始移动。
5.设置P02控制字的第二位(Enable/Rapid stop)或者第三位(Enable/Stop),然后点击SendPA按钮,可以停止电机转动。
(建议用Enable/Stop)6.紧急情况:可以按工位的急停按钮或者直接打开安全门,此时可以断开变频器的使能,直接使电机停止运转。
7.电机反转时,P02控制字设置为:0C06,其余操作相同。
8.手动移动伺服电机到零点位置,设置P02控制参数为1106,点击SendPA按钮,即可把当前位置设为零点参考位置(图4)。
9.零点设置完成后,把control模式更改为monitor模式。
具体可以参考SEW资料:MOVIDRIVE MDX61B Extended Positioning via Bus Application.pdf1.打开软件调试界面图12.更改操作模式从monitor到control。
图23.jog 设置,手动运动图34.地板伺服到达零点位置后,设置当前位置为零点方法图45.设置完成后,把control 改为monitor control模式69547。
SEW-MDX61B驱动器-MOTION STUDIO软件调试步骤和方法-同步伺服电机

然后点击
移动类型负载折算到电机轴处的转动惯量
运行物体质量M:[kg] 运行速度v:[m/s] 达到运行速度v时电机的运行转速nm:[rpm] 负载折算到电机轴处的转动惯量 Jext:[kgm2 ]
Jext = 91.2 * M * (v/nm)2
转动方向
垂直于圆环平面
实心圆柱体 沿纵轴方向
空心厚壁圆柱体 沿纵轴方向
圆盘
垂直于圆盘平面
圆盘
沿对称轴方向
球体
沿球心轴线方向
空心薄壁球体 沿球心轴线方向
长度l的棍体 垂直于棍体中心
图识 转动惯量
J = m * r2
J=
1 2
*m *
r2
J=
1 2
* m * ( r12 +
r22
)
J=
1 2
*m *
r2
SEW – MDX61B系列调试
总线控制 - 系统架构
端子;模拟量控制 - 系统架构
软件调试工具
➢ 1.电脑通讯盒USB11A ➢ 2. SEW - MOVITOOLS® MOTION STUDIO
软件
USB11A
MOVITOOLS® MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
选择速度操作模式
然后点击
刚性(范围0.5-2),数值越大,刚性 越强,但电机易不稳定,通常先输 入1,在根据实际情况调整
SEW软件使用方法资料
连接的变频器显示在此
打开软件,显示此 画面,先选择椭圆 框里的选项,最后 点Shell进入控制画面
连接的设备类型
关闭所有的工具
项目路径
设置零点的方法;1:拔掉使能线 2:切换到控制模式 3:电机走到想要的位置 4:设置PO1控制字的状态(Bit1;2;8; 11=1 其余全为0) 5:插上使能线,点传送(Send p0)这样就等于重新寻参了。也就是重新设定了零位。
3. 自动运行的过程: a.变频器使能, 设置硬件信号, Controller inhibit(DI00)=1
Enable(DI01)=1
设置控制字1“Enable / Rapid stop”=1. b.切换自动运行模式 c.设置给定位置和给定转速,如果设定 的位置和当前的实际位置不相同,位置 到达的状态”Position reached’=0 d.激活开始运行PO1:8“Start”=1,在整个 位置控制过程中保持 1. PO2和PO3定义目标位置 PO4定义转速设定值 PO5定义加速斜率 PO6定义减速斜率 2. PO1:15的电平定义在Startup中的2个位控斜率
c.激活参考运行PO1:8 “ Start ”=1
d.等待,到轴参考点P11:2”Axis referenced”=1
注:在设备第一次运行以及更换 编码器后,进行参考运行。
LY 2_E 10/1998
e.取消参考运行“ Start ”=0
自动模式
自动模式选择: PO1:11 = 1 PO1:12 = 1
LY 2_E 10/1998
e.等待,到目标位到达”Target position
reached”=1
d.取消位置运行”Start”=0
MOVIDRIVE A型固定为9.6KBaud MOVIDRIVE B型由S13开关决定 选择PC连接接口 SBUS、RS485地址
SEW-MC07B变频器-MOTION STUDIO软件调试步骤,MOTION STUDIO调试方法和技巧

2. 总线网络控制
SEW - 网关
设定相关参数
监控电机运行状态
监控总线数据 监控变频器输出点状态 监控PLC输入点状态
手动操作
点击,进入手动操作控制模拟器
点击,激活手动操作控制模拟器
设定运行速度
起动
电机运行转速监控 电机运行电流监控
逆时针转动 停止 顺时针转动
点击,退出手动操作控制模拟器
FSC11B
制动电阻
DRE(N)(S)...异步电机
软件调试工具
➢ 1.电脑通讯盒USB11A + FSC11B ➢ 2. SEW - MOTION STUDIO 软件
USB11A
FSC11B
MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
运行SEW控制器调试软件 (MOVITOOLS MotionStudio)
1. 选择 2. 点击
1. 建立项目名称 2. 然后点击
点击,(进行通讯接口配置)
配置通讯接口,选择Serial
1. 点击,搜索所连接驱动器
3. 点击,配置驱动器所要控 制电机的相关信息
2. 如通讯正常,可找到所连 接驱动器
1. 输入所需保存文件名,后 缀为.vb7
2. 点击,将驱动器参数备份到电脑上
1. 驱动器参数备 备份参数文件
1. 点击,将备份到电脑上的参数下传到驱动器
1. 备份到电脑上的参数下传到驱动器,完成
MOVITOOLSEW变频器软件手册

24
第四个窗口,显示编码器的信息
因为无电机编码器, 显示无信息
25
第五个窗口,选择电机的类型
26
第六个窗口,根据电机铭牌,设定电机的参数
电机型号 电机额定电压 电机额定频率
输入侧电压
SEW编码器型号 编码器类型
编码器脉冲数
TF/TH的连接 电机过热响应
TF 热敏电阻型热保护器
制动器功能 制动器释放时间 制动器制动时间
第十个窗口,下载初始化参数
成功下载 信息
21
10.VFC n-control控制模式说明
变频器内可存储2套电机的参数, 2台电机可通过接触器选择,参数 组通过开关量输入设定;
第一个窗口是不可以修改的,其 显示的存储在变频器内基本参 数(包括选件和电机参数)
22
第二个窗口,选择全部或部分初始化
选择完整的初始 化过程
选择部分初始 化过程
23
第三个窗口,选择变频器连接的电机
简单的速度控制 选择标准模式 (V / F) 选择矢量控制模式 VFC VFC n-control CFC
VFC:电压矢量控制 VFC n-control:MDV控制器和电机
历史ⅱ岳麓版第13课交通与通讯 的变化资料
精品课件欢迎使用
[自读教材·填要点]
TH 开关型热保护器
27
第七个窗口,选择是否应用编码器
如果不用编码器,为 VFC控制模式
28
第八个窗口,选择应用
29
转速控制 提升应用 DRS-同步控制 IPOS-位置控制 转矩控制
第九个窗口,设定速度调节器参数
30
转速调节器的“刚度” 设定范围:0.5…2 默认值为“1” 值大---响应快,过高系统易震荡 值小---响应慢
SEW变频器基本操作说明

在启动过程中,需要根据电机的特 性和应用需求设置合适的启动参数, 如启动时间、启动转矩等。
停止操作
停止方式
变频器有多种停止方式,如减速 停止、自由停止、惯性停止等。 根据实际需求选择合适的停止方 式。
停止参数设置
在停止过程中,需要根据实际需 求设置合适的停止参数,如减速 时间、减速斜率等。
VS
详细描述
检查电机和负载是否正常,如是否有卡阻 、过载等问题;检查参数设置,如电机控 制参数、速度调节参数等;检查外部干扰 源,如电磁干扰、信号线干扰等。
设备过热
总结词
设备过热可能是由于散热不良、长时 间高负荷运行或环境温度过高等原因 。
详细描述
检查散热装置是否正常工作,如散热 风扇、散热片等;避免长时间高负荷 运行,适时停机休息;保持设备运行 环境通风良好,降低环境温度。
根据调速范围选择
根据系统的调速范围(如宽调速、窄调速等)选择具有相应性能的 变频器。
根据控制精度要求选择
根据系统对控制精度的要求,选择具有高精度控制功能的变频器。
02
设备安装与调试
安装环境要求
温度要求
变频器运行时周围温度应保持在-10℃至 40℃之间,环境温度的波动应不超过±5℃。
振动要求
变频器应安装在振动较小的地方,避免受到 机械振动的影响。
安全停车
在需要立即停止电机的情况下, 应使用安全停车功能,以确保设 备和人员安全。
频率调整
频率设置
01
根据实际需求,通过面板或外部信号设置合适的输出频率。
频率调整范围
02
了解并熟悉变频器的频率调整范围,以确保电机在合适的转速
范围内运行。
频率精度
03
SEW-MDX61B驱动器-MOTION STUDIO软件调试方法和步骤-异步伺服电机

设定相关参数
监控电机运行状态
监控模拟量输入数据
监控PLC输入点状态
监控变频器输出点状态
08参数组可记录最 近的5组故障情况
2. 总线网络控制
设定相关参数
监控电机运行状态 监控PLC输入点状态
监控总线数据
监控变频器输出点状态
驱动器内部程序输入
IPOS plus
内部位置控制和逻辑控制系统
• 支持宏指令,最多包含1000个指令行和注释行 • 支持增量型编码器和绝对值编码器 • 近似于PLC功能
软件调试工具
➢ 1.电脑通讯盒USB11A ➢ 2. SEW - MOVITOOLS® MOTION STUDIO
软件
USB11A
MOVITOOLS® MOTION STUDIO 软件
➢ 1.电脑通讯盒USB11A 随机附带光盘 ➢ 2. SEW – 网站下载2.2G版本 https://www.seweurodrive.de/os/dud/?tab=software&country=DE &language=de_DE&search=movitools
SEW – MDX61B系列调试
总线控制 - 系统架构
L1 L2 L3 PE
MDX61B... DBG60B 编码器卡
USB11A
总线网卡 制动电阻
电机编码器 DRL...异步伺服电机
端子;模拟量控制 - 系统架构
L1 L2 L3 PE
MDX61B... DBG60B
编码器卡
USB11A
制动电阻 电机编码器 DRL...异步伺服电机
转动类型负载折算到电机轴处的转动惯量
转动物体质量M:[kg] 转动物体半径r: [m] 转动速度n:[rpm] 达到转动速度n时电机的运行转速nm:[rpm] 负载转动惯量 Jload: [kgm2 ] 负载折算到电机轴处的转动惯量 Jext:[kgm2 ]
sew伺服寻参考点
sew伺服寻参考点
该标准化旨在指导员工对SEW伺服进行校零操作及对伺服参数
的设置进行上传与下载。
处理步骤一
右键单击需要设置的设备,选择“启动设备工具”,出现复选框“MOVITOOLS motion Studio ”,单击出现3个复选框,由于软件问题,此处复选框菜单无法显示,选择第一或第二选项均可进入变频器设置界面。
选项1为此网络下所有可连接网络设备均可显示并进行设置;选项2为当前所选设备的配置界面。
处理步骤二
1.去除控制器X13/DIΦΦ“控制器禁止”端子的二进制输入,开始创建modulo positioning定位模块;
2.上位机若为总线控制,选择“bus”;若为I/O端子控制,选择“terminals”;
处理步骤三
1.选择角度单位(脉冲/度/0.1度三种可选);输入整数形式的齿轮箱和外部减速比,然后点击“ caculation”;选择位置信息来源(电机编码器/ 外部增量式编码器/外部绝对式编码器三种可选,一般为电机编码器);选择寻零方式(5和8均为设置当前点为电气零点);
2.设置自动模式最高速度,点动模式最高速度和速度控制(所有模式)最高速度;
处理步骤四
参考运行模式选择:
Bit 11 “Mode High” = 0
Bit 12 “Mode Low” = 1 参考运行模式需要Bit 8 “Start”=1 由于参考模式参数设置的是5,即当前位置作为参考位置,点击Send PA后就会将当前位置作为0 点,PI2/3 Actual position会变为0[inc]。
Movidrive-B型驱动器-软件配置带编码器电机..
选择 选择
选择相应的通讯口
选择
然后点击(扫描伺服控制器)
选择
扫描到具体的控制器型号,表明通讯正常 然后点击(进入调试菜单)
然后点击(进入配置菜单)
选择参数组1,存储 配置参数
然后点击
进行完整的电机配置
然后点击
选择矢量模式
然后点击
然后点击
选择SEW普通异步电机类型或 非SEW普通异步电机
然后点击
移动类型负载折算到电机轴处的转动惯量
运行物体质量M:[kg] 运行速度v:[m/s] 到达运行速度v时电机的运行转速nm:[rpm] 负载折算到电机轴处的转动惯量 Jext:[kgm2]
Jext = 91.2 * M * (v/nm)2
例:
运行物体质量M:46 (kg) 运行速度v:2.72 (m/s) 到达运行速度v时电机的运行转速nm:2023 (rpm)
2
Jext = 91.2 * 46 * (2.72/2000)
= 0.00776 (kgm2 )
= 78 * 10- 4 (kgm2 )
转动类型负载折算到电机轴处的转动惯量
转动物体质量M:[kg] 转动物体半径r: [m] 转动速度n:[rpm] 到达转动速度n时电机的运行转速nm:[rpm] 负载转动惯量 Jload: [kgm2 ] 负载折算到电机轴处的转动惯量 Jext:[kgm2]
点击(接受系统计 算出的值)
然后点击
点击(接受系统计 算出的值)
然后点击
点击(接受系统计 算出的值)
然后点击
然后点击
然后点击
显示配置成功
客户根据控制要求输入相应参数值
负载转动惯量 Jload =
SEW电机怎么正反转?如何调转向?
SEW电机怎么正反转?如何调转向?SEW电机的正反转使用的情况紧要显现在形车,木工,台钻,机床等工作情况中,之前很多人都以为假如想让电机反转的话,那么我们的需要的是讲电机的导线进项进行拆除,这种方法自然是可行的,但是这样的方法过于繁琐,繁琐的工作流程会让整工作的时间延长,所以在后来的生产过程中,为了供应生产效率,在工作的时候可以采用不同的接线方法让电机实现一个正反转的过程。
SEW电机如今经过了特别接线方式之后,我们只要在工作的时候将电机的开关打开就可以了,不需要在去重新接线的,在我们接线的时候,我们将接至电动机的三相电源中的两组对调线进行接线就可以,这种接线的方式可以去快捷的掌控电机正反转的情况的。
同时还可以在电路中加添保护电路的功能,同时也可以对低电压和远距离进行相对的掌控。
如今的正反转技术已经有了PLC以及的单片机这一类产品的电路改善,在电路的使用中我们添加相应的开关和广电开关这种掌控方式,为日后的工业智能化也做了相应的铺垫。
SEW电机正反转的时候,假如是想要正方面启动的话,那么我们需要做的接线方式是将空气开关和三相电源相连接,另外我们在按下启动键这样一来就可以合并自锁,电机这个时候的相序是L1,L2L3L4,这样的排列次序就是可以让电机正向启动的。
另外的假如我们需要的电机反向启动的话,那么我需要做的是让卡农器开关联通三相电机,然后的再次按上开关按钮,这个时候电机的电源的次序是L1.L3L,L2的一个连接次序。
SEW电机假如是他励的情况的话,那么我们想要变化他转动方向的话,我们需要做是可以将电枢两端的电压进行一个反接的情况,这样的话就可以变化电枢电流的方向了,当然还可以通过该百年励磁绕组的方法,一般情况下变化了励磁绕组的级性的恶化,那么也就是变化了整个电机的磁场的方向,所以在操作的时候方向自然的也就会发生变化了。
SEW电机的励磁绕组的匝数比较多,所以他的电感也确定是会大的,我们将励磁绕组从电源的的上面去断开,这个时候也就会产生大量的自感电动势,开关也会产生火花,所以假如需要常常使用电动机的反向转动的话,还是需要去采用变化电枢的电流方向才好。
SEW零点设置方式
SEW伺服电机零点设置方式1.打开软件,连接变频器,打开shell,双击Application目录下的Extended positioning via bus(图1),打开调试软件界面(图2)。
2.第一使变频器X13接口DI00电源断开,把monitor模式切换成control模式,现在能够通过SEW软件手动模拟外部总线发送的操纵字。
3.设置P01操纵字为0A06(P01 control word 2)(图3),现在操纵字为手动jog模式,正方向转动P0二、03 不需要设置P04 设置速度(建议100以下)P05 为加速 Ramp(建议6000ms)P06 为减速Ramp (建议 6000ms)4.手动设置操纵字和操纵参数后,点击SendPA 按钮,现在所有手动设置参数被传送到变频器,伺服电机开始移动。
5.设置P02操纵字的第二位(Enable/Rapid stop)或第三位(Enable/Stop),然后点击SendPA按钮,能够停止电机转动。
(建议用Enable/Stop)6.紧急情形:能够按工位的急停按钮或直接打开平安门,现在能够断开变频器的使能,直接使电机停止运转。
7.电机反转时,P02操纵字设置为:0C06,其余操作相同。
8.手动移动伺服电机到零点位置,设置P02操纵参数为1100,点击SendPA按钮,即可把当前位置设为零点参考位置(图4)。
9.零点设置完成后,把control模式更改成monitor模式。
具体能够参考SEW资料:MOVIDRIVE MDX61B Extended Positioning via Bus Application.pdf1.打开软件调试界面图11.更改操作模式从monitor到control。
图2 2.jog 设置,手动运动图33.地板伺服抵达零点位置后,设置当前位置为零点方式图44.设置完成后,把control 改成monitor control模式69547。
SEW变频器基本操作说明.
1
SEW-传动设备(天津)有限公司 电子技术中心
TASC 8/2005
Driving the world
Getriebemotoren \ Antriebselektronik \ Antriebsautomatisierung \ Services \ Training
5
MOVIDRIVE---驱 动 变 频 器 2 通过面板实现手动操作
参数级转换,同时按下启动调试 指向下一个菜单条或在编辑状态 下修改参数值(增大) 指向上一个菜单条或在编辑状态 下修改参数值(减小) 取消调试/回到初始显示状态 取消手动/从报警状态退出
TASC 8/2005
Driving the world
16
下载参数:
1. 2.
选择数据源---点击Browse按钮,选择PC文件。 选择数据地址---控制器(点对点连接)
TASC 8/2005
Driving the world
Getriebemotoren \ Antriebselektronik \ Antriebsautomatisierung \ Services \ Training
Fieldbus Monitor 可实现总线监控功能;
可实现总线监控; 可模拟主机,实现虚拟总
线控制;
TASC 8/2005
Driving the world
Getriebemotoren \ Antriebselektronik \ Antriebsautomatisierung \ Services \ Training
SEW变频器维修使用指导书

SEW变频器维修使用指导书一.MOVIDRIVE系列变频器概述下图是该型号变频器的外观图。
该型变频器目前使用较多,我们的四合一、二合一加注机的随行系统使用的就是这个型号的变频器。
IPOS:内部逻辑控制与位置控制功能。
具备如下现场总线接口(可选):•DFP21B PROFIBUS DP/FMS•DFI11B INTERBUS-S•DFC11B CAN•DFD11B Device-Net (准备)及位置控制板、扩展I/O、同步控制器、绝对编码器接口等可选件。
该型变频器有如下种类:控制方式编码器调速范围Nmax=3000rpm静态转速精度Nmax=3000rpmVFC控制无200:10.30% VFC控制1024增量型编码器800:10.01% CFC控制1024增量型编码器3000:10.01% CFC控制sin/cos编码器5000:10.01% SERVE控制旋转变压器>3000:10.01%二.DBG60B参数写入单元(一)构成功能键菜单选取语言选择确认STOP :终止运行,可以通过RUN 或者重新送电恢复。
RUN :恢复运行。
DEL/左箭头:删除键,光标左移,部分子菜单状态的退出。
OK/右箭头:确认键,光标右移。
地球键:用于选择语言。
功能键:菜单选择键:选择菜单。
10 个数字键带 “±” 和逗号: (二)连接写入单元1、把电缆插到XTerminal 接口。
2、在出现SEW 标志后几秒,用地球图标键选择语言种类,并用OK 键确认。
(三)启动与停止1、用STOP 键可以停止变频器工作,或对故障进行复位。
2、用RUN 键重新启动变频器。
3、参数P70可以屏蔽这两个键。
(四)子菜单 1、菜单结构:通过菜单选取键进入菜单,并用OK 键激活:2、参数模式:➢ 通过参数选择选参数组。
1 参数模式2 变量模式3 基本显示4 Wake-up 参数5 手动操作6 初始化操作7 拷贝到 DBG8 拷贝到 MDX9 用户菜单 10 P0000 增加 11 P0000 消除12 可调整 wake-up 参数 13 供货状态 14 系统设定 15 退出写入单元菜单结构➢通过10位数字键和箭头选择参数。
sew调试步骤自己总结

1.变频器调试步骤:(所用软件为M O V I T O O L S)设置网关DP地址,然后短接所有变频器的DI01与24VIO端子,然后变频器与PC通信,点扫描,扫描出设备后下载变频器启动信息,即parameter1(设置控制方式为VF,根据实际情况设置电机型号),然后修改参数,如P100设为SBUS/Fixed,P101设为SBUS,P600等设为NO FUNCTION,P881设为1,其他变频器也是这样,只是修改一下P881(系统总线的地址)的数值。
然后网关与PC 通信,扫描出与网关通信的所有变频器,然后知道变频器与PLC通信的所用的外设地址,最后把最后一个变频器的S1和S2接通,其余变频器的S1与S2断开,最后在通电状态下把AS接通(切记是在所有变频器的S1与S2设置正确的前提下)。
伺服调试步骤:(所用软件为MT_Manger)设置伺服DP地址,然后断开DIOO与24VIO,接通DI01与24VIO,同时接通7与9端子,然后软件与伺服通信,通信波特率为57.6,型号为MOVITRAC B,点对点通信方式,下载伺服启动信息,设置转动惯量为100,电机温度过高时立即停止然后把启动信息下载到伺服(必须在禁止模式下)。
然后点通过扩展总线控制,选择通信方式为DP,然后电子齿轮比用默认值,不能点击Caculate,即电子齿轮比全部采用默认值,直接点击NEXT,然后设置软限位,然后下载到伺服(必须在禁止模式下)。
然后进入监控模式,伺服启动必须先设置手动启动,此时状态字Motor turning为1,此时若IPOS reference位为0,必须进行寻参模式,才能启动自动模式,寻参模式启动方法如下:寻参:1.设置P902的参数,确定寻参类型为0,然后在控制模式下通过PC发控制字以及0转速给伺服,即启动寻参,寻参原位信号通过端子DI03(端子功能为Reference Travel)传入,为1时减速,脱离时停止,同时将当前位置清零,此时IPOS reference位为1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
详细的产品介绍和功能介绍请 参见《MOVIDRIVE MDX61B Modulo Positioning Application》
SEW-EURODRIVE GmbH & 13
ECDriveS | BUC-BD | Tobias Schäfer
• 点动模式-Jog mode
[1]在点动模式,通过2个 控制位的选择,实现电机 正向运行和反向运行; Bit 9“Jog+” =1 正向运 行 Bit10”Jog-” =1 反向运
行
[2]点动的转速通过PO4设 定; [3]点动的加减速斜坡通过
PO5和PO6设定
• 寻参模式-Reference mode
• 设定通讯方式以及速度限定值
• 通讯类型选择
•
通讯超时响应选 择
•
•
•
定位模式最大速 度限定,最大值为 90%*Nmax speed control 点动模式最大速 度限定,最大值为 90%*Nmax speed control 最大速度,参考电 机铭牌上电机额 定速度
• 监控模式-monitor mode
• 逆时针方向定位-AUTO CCW
PO1:bit11=1 bit12=0 bit13=1 • PO2和PO3组合位为设定目 标值 • PO4为设定速度 • PO5为定位加速斜坡 • PO6为定位减速斜坡 AUTO CCW模式为逆时针单方 向定位 eg.当前位置为345°,目标设定 值为0 °,AUTO CCW模式下, 电机会逆时针旋转345 °到达 0 °。 • 到达目标位之后PI1:bit3=1 Target position reached
• 逆时针方向相对定位-AUTO CLOCK CCW
PO1:bit11=1 bit12=1 bit13=1 • PO2和PO3组合位为设定 目标值 • PO4为设定速度 • PO5为定位加速斜坡 • PO6为定位减速斜坡 AUTO CLOCK CCW模式下, 若当前位置为0 °,目标设定 为90 °, PO1:8start每触发 一次高电平信号,电机都会逆 时针方向旋转90 °。 位置改变如下: 0 ° →270 ° →180 ° →90 ° →0 °
PO1:bit11=0 bit12=1 bit13=0
• PLC给定寻参模式之后,电机会按照 选择的寻参方式进行寻参动作;寻参 运行的转速可通过P901和P902参数 设定 寻参完成之后PI1:bit2 IPOS referenced会反馈一个高电平给 PLC 注:只有P1:bit2有信号的状态 下,定位的指令才会生效。
•
• Reference offset:寻参 偏差 • Source actual position:位置源选择; X15电机尾部编码器, X14和DIP为外部绝对值 编码器 • Reference travel type: 寻参方式选择,详见下页 PPT
• Modulo寻参方式选择
Type 0:CCW(逆时针)方向触发到第一个电机编码器的零脉冲信号的点设为参考点
Modulo positioning application
MOVIPRO&MOVIDRIVE Inverters
• 设定齿轮比以及寻参方式
• • 设置单位:(inc) 脉冲数 ( ? )度 (?10 )0.1度 gearbox为减速箱的速 比,现场减速机型号 WAF37,铭牌标注的速比 i=53.92,此处填写的为分 子分母的形式,具体齿数 可以联系SEW addition gear填写外 部速比,现场减速机出轴 连接的为tuenkers的分 度盘,现场测试得出的速 比为4。(具体速比值需要 联系tuenkers )。填写完 成之后点calculation计 算。
Type 1:CCW(逆时针)方向触发到零点开关的上升沿信号的点设为参考点
Type 2:CW(顺时针)方向触发到零点开关的上升沿信号的点设为参考点。Reference cam 原点开关信号需要接到movidrive_X13-4或MOVIPRO_X5102-1上
Type 5和type 8:当前位置设为参考点。 5和8的区别:5电机抱闸打开,通过励磁保持当前位置;8电机抱闸不打开,通过抱闸来保持 当前位置
• •
• 顺时针方向定位-AUTO CW
PO1:bit11=0 bit12=0 bit13=1 • PO2和PO3组合位为设定目 标值 • PO4为设定速度 • PO5为定位加速斜坡 • PO6为定位减速斜坡 AUTO CW模式为顺时针单方向 定位 eg.当前位置为15°,目标设定 值为0 °,AUTO CW模式下, 电机会顺时针旋转345 °到达 0 °。 • 到达目标位之后PI1:bit3=1 Target position reached
• 顺时针方向相对定位-AUTO CLOCK CW
PO1:bit11=0 bit12=1 bit13=1 • PO2和PO3组合位为设定 目标值 • PO4为设定速度 • PO5为定位加速斜坡 • PO6为定位减速斜坡 AUTO CLOCK CW模式下, 若当前位置为0 °,目标设定 为90 °, PO1:8start每触发 一次高电平信号,电机都会顺 时针方向旋转90 °。 位置改变如下: 0 ° →90 ° →180 ° →270 ° →0 °
14.01.2019
通过”Monitor” 和”Control”按钮选择控 制源 - Monitor:总线通讯之间 的过程数据显示 -Control:通过PC发送过 程数据。 [1]变频器通过PC而不是 PLC控制。 [2]控制字PO1由鼠标设置 或撤除每一个数据位。 [3]PO2设定转速 “Setpoint speed”和 PO3目标位置” Target position”在输入框中设 置 [4]点击< Send >发送过 程数据到变频器中